Spatially Distributed Sampling and Reconstruction of High-Dimensional Signals Cheng Cheng Yingchun Jiang
advertisement

Spatially Distributed Sampling and Reconstruction
of High-Dimensional Signals
Cheng Cheng
Yingchun Jiang
Qiyu Sun
Department of Mathematics
University of Central Florida
Orlando, FL 32816
Email: cheng.cheng@knights.ucf.edu
Department of Mathematics
Guilin University of Electronic Technology
Guilin, Guangxi 541004
Email: guilinjiang@126.com
Department of Mathematics
University of Central Florida
Orlando, FL 32816
Email: qiyu.sun@ucf.edu
Abstract—A spatially distributed system for signal sampling
and reconstruction consists of huge amounts of small sensing devices with limited computing and telecommunication
capabilities. In this paper, we discuss stability of such a
sampling/reconstruction system and develop a distributed algorithm for fast reconstruction of high-dimensional signals.
I. I NTRODUCTION
Consider high-dimensional signals with finite rate of innovation,
X
f (t) =
cλ φλ (t), t ∈ Rn ,
(I.1)
λ∈Λ
where cλ and φλ are amplitude and impulse response of a
signal generating equipment located at the innovative position
λ ∈ Λ respectively ([1], [2], [3], [4], [5], [6], [7], [8], [9], [10]).
The parametric representation (I.1) retains some of simplicity
and structure of the band-limited (shift-invariant, reproducing
kernel) model ([11], [12], [13], [14]), and it is more flexible
for approximating real data ([1], [2], [3], [6]). In this paper,
we further assume that the set Λ of innovative positions is
contained in a low-dimensional manifold Md ⊂ Rn with
nonnegative Ricci curvature,
Λ ⊂ Md ⊂ R n .
Then a signal of the form (I.1) is superposition of impulse
responses of generating equipments at innovative positions
that could be described by much fewer parameters than the
dimension n of the signal.
Next we describe spatially distributed systems (SDS) for
signal sampling and reconstruction. Let there be a sensing
device located at every γ ∈ Γ ⊂ Md and ψγ be impulse
response of the sensing device at γ ∈ Γ. For such an SDS,
the signal f in (I.1) generates a sampling data
X
yγ := hf, ψγ i =
hψγ , φλ icλ , γ ∈ Γ
(I.2)
signal f is reconstructed in the headquarter from solving linear
equations of large size,
Sc = y,
(I.3)
where S := (hψγ , φλ i)γ∈Γ,λ∈Λ is sensing matrix of the SDS,
c := (cλ )λ∈Λ is amplitude vector of the signal f , and y :=
(yγ )γ∈Γ is sampling data vector in (I.2).
Recent technological advances have opened up possibilities
to SDSs consisting of huge amounts of sensing devices with
some computing and telecommunication capabilities. In an
SDS, device at every sensing location has limited telecommunication ability but certain computing power. Unlike a
centralized system, it communicates with neighboring devices
only, and it can use sampling data received from neighboring
devices to make first guess of the signal near its location. The
reconstruction procedure is for every device to send its first
guess of the signal to neighboring devices and to continue the
above predictor-corrector process until the signal is recovered
approximately. An SDS would give unprecedented capabilities
especially when creating a reliable communication network
is impracticable, and/or establishing a global center presents
formidable obstacle to collect and process all the information
(such as big-data problem). Meanwhile, for an SDS to be practicable, there are lots of important and challenging problems
need to be solved, such as designing a system for stable signal
reconstruction in the presence of noisy sampling environment
and failure of some sensing devices, and developing signal
reconstruction algorithm not to exceed communication and
computing capacities of each device.
In this paper, we introduce a local stability criterion for
an SDS to recover high-dimensional signals in the presence
of sampling noises, and we also develop a distributed signal
reconstruction algorithm to fulfill communication and computing requirements of each device.
λ∈Λ
for every sensing device.
Most well-studied signal reconstruction systems are centralized ([1], [3], [7], [9], [11], [12], [13], [14]). In such systems,
all sampling data are sent to the headquarter and the original
c
978-1-4673-7353-1/15/$31.00 2015
IEEE
II. S PATIALLY DISTRIBUTED SYSTEMS FOR SIGNAL
SAMPLING AND RECONSTRUCTION
In an SDS for signal sampling and reconstruction, there
should not be a lot of sensing devices in any spatial unit,
which means that the set Γ of device locations is relatively
separated,
X
(II.1)
D(Γ) := sup
χγ+[0,1]n (t) < ∞.
t∈Rn
By (II.3), (II.4), (II.5) and (II.6), there exists a positive
constant C such that
Z
|hψγ , φλ i| ≤
h(t − γ)g(t − λ)dt
Md
γ∈Γ
Recall from Bishop-Gromov inequality that balls in a manifold
Md with nonnegative Ricci curvature grow no faster than in
Euclidean space Rn [15]. So we use the Euclidean distance
on Rn to measure the distance between two sampling devices
located in Λ ⊂ Md , instead of geodesic distance on Md . This
together with (II.1) leads to our assumption on the set Γ ⊂ Md
of device locations:
Assumption 1: The counting measure µ on Γ has polynomial
growth, i.e., there exists a positive constant D1 such that
µ(B(γ, r)) ≤ D1 (1 + r)d for all γ ∈ Γ,
(II.2)
where B(γ, r) := {γ 0 ∈ Γ, |γ − γ 0 | ≤ r} is the ball with
center γ and radius r, and d is the dimension of the manifold
Md .
We call the minimal constant D1 for (II.2) to hold as
maximal sampling density of the SDS, c.f. [3], [11], [12].
For cost-effectiveness of an SDS, sensing devices in different locations could be chosen to have local sensing ability and
similar specification. So we assume the following for sensing
devices:
Assumption 2: The impulse response ψγ of the sensing
device located at γ ∈ Γ is enveloped by γ-shift of a bounded
signal h with finite duration,
|ψγ (t)| ≤ h(t − γ), γ ∈ Γ.
(II.3)
Next let us discuss signals being reconstructed from an SDS.
As a signal with finite rate of innovation has finitely many
innovative positions in any spatial unit, the set Λ of innovative
positions is relatively separated. In this proceeding paper, we
focus on discussing exact sampling problem:
Assumption 3: There is a sensing device located at every
innovative position, i.e.,
Γ = Λ.
(II.4)
The reader may refer to [16] for general sampling problems.
Recall that an SDS has limited telecommunication capacity
and computing ability. Thus for fast signal reconstruction of an
SDS, signal generating equipments far away from any sensing
location should not have strong influence on the sampling data.
So we make the following assumption on impulse responses
of signal generating equipments:
Assumption 4: There exists a signal g with polynomial decay
at infinity,
kgk∞,α := sup (1 + |t|)α |g(t)| < ∞ for some α > d, (II.5)
t∈Rn
such that impulse response φλ of the signal generating equipment located at the innovative position λ ∈ Λ is enveloped by
λ-shift of the signal g,
|φλ (t)| ≤ g(t − λ), λ ∈ Λ.
(II.6)
≤ C(1 + |λ − γ|)−α
for all γ, λ ∈ Γ.
Then the sensing matrix S := (hψγ , φλ i)γ,λ∈Γ of our SDS has
polynomial off-diagonal decay. In particular, it belongs to the
Jaffard class Jα (Γ) of matrices,
S ∈ Jα (Γ), α > d,
(II.7)
where
Jα (Γ) := A = (a(γ, λ))γ,λ∈Γ , kAkJα (Γ) < ∞
and
kAkJα (Γ) := sup (1 + |γ − λ|)α |a(γ, λ)|
γ,λ∈Γ
([17], [18], [19], [20]).
Let `p (Γ), 1 ≤ p ≤ ∞, be the space of all p-summable
sequences on Γ and denote its norm denoted by k·kp . Observe
from the polynomial growth property (II.2) that
X
sup
(1 + |γ − λ|)−α
γ∈Γ
λ∈Γ
≤ sup
γ∈Γ
≤ sup
γ∈Γ
≤ D1
X
(m + 1)−α
m≥0
X
1
X
m≤|γ−λ|<m+1
µ B(γ, m + 1) (m + 1)−α − (m + 2)−α
m≥0
∞
X
(m + 2)d (m + 1)−α − (m + 2)−α
m=0
= 2d D1 + D1
M
X
lim
M →+∞
−
M
+1
X
(m + 1)−α (m + 2)d
m=1
(m + 1)d−α
m=1
= D1 2d +
∞
X
(m + 1)−α (m + 2)d − (m + 1)d
m=1
2d−1 (2α − d)D1
.
(II.8)
≤
α−d
Then a matrix in Jα (Γ), α > d, defines a bounded operator
on `p (Γ), 1 ≤ p ≤ ∞.
Proposition II.1. Let α > d and 1 ≤ p ≤ ∞. If the counting
measure µ on Γ has polynomial growth property (II.2) and
A ∈ Jα (Γ), then
2d−1 (2α − d)D1
kAkJα (Γ) kckp , c ∈ `p (Γ).
α−d
For our SDS, we obtain from (II.7) and Proposition II.1 that
a signal with bounded amplitudes at all innovative positions
generates bounded sampling data at all sensing locations.
Given a matrix A = (a(γ, λ))γ,λ∈Γ , define its band approximation
As = (as (γ, λ))γ,λ∈Γ , s ≥ 0,
(II.9)
kAckp ≤
For an SDS with `2 -stability, we obtain from (III.2) and
N
Proposition II.2 that quasi-main submatrices χ2N
λ Sχλ , λ ∈ Γ,
d
2
of size O(N ) have uniform ` -stability for large N .
by
as (γ, λ) =
a(γ, λ) if
0
if
|γ − λ| ≤ s
|γ − λ| > s.
We notice that matrices in the Jaffard class can be approximated by band matrices.
Proposition II.2. Let α > d and 1 ≤ p ≤ ∞. If the counting
measure µ on Γ has polynomial growth property (II.2) and
A ∈ Jα (Γ), then
2d−1 (2α − d)D1
(s+1)−α+d kAkJα (Γ) kckp
α−d
for all c ∈ `p (Γ), where As , s ≥ 0, are band matrices in
(II.9).
k(A−As )ckp ≤
For our SDS, the sensing matrix S is a band matrix if the
enveloping signal g in Assumption 4 has finite duration. In
general, we obtain from (II.7) and Proposition II.2 that the
sensing matrix S can be approximated by band matrices. This
approximation property plays crucial roles for our local stability criterion and distributed signal reconstruction algorithm
in next two sections.
III. S TABILITY CRITERION OF SPATIALLY DISTRIBUTED
Theorem III.2. If an SDS satisfies (II.2), (II.3), (II.4), (II.5)
and (II.6), and it has `2 -stability with lower stability bound
A, then
A N
N
kχ ck2 , c ∈ `2 (Γ)
kχ2N
λ Sχλ ck2 ≥
2 λ
for all λ ∈ Γ and all integers N satisfying
2d (2α − d)D1
(N + 1)−α+d ≤ A.
α−d
Most importantly, the converse is shown to be true in
[16], c.f. local stability criterion in [21] for one-dimensional
convolution-dominated matrices.
Theorem III.3. If an SDS satisfies (II.2), (II.3), (II.4), (II.5)
and (II.6), and there exists a positive constant A0 and an
integer N0 ≥ 2 such that
−(α−d)/(α−d+1)
A0 ≥ CkSkJα (Γ) N0
and
N0
N0
2
0
kχ2N
λ Sχλ ck2 ≥ A0 kχλ ck2 , c ∈ ` (Γ),
SYSTEMS
p
We say that an SDS has ` -stability if its sensing matrix S
satisfies
Akckp ≤ kSckp ≤ Bkckp , c ∈ `p ,
(III.1)
where A and B are positive constants ([21], [22]). We call the
minimal constant B and the maximal constant A for (III.1)
to hold the upper bound and the lower bound of the `p stability. Reconstructing a signal from sampling data in the
presence of noises is a leading problem in sampling theory
([11], [12], [13], [23], [24], [25], [26], [27]). For an SDS with
sensing matrix having `p -stability (III.1), the `p -error between
the reconstructed signal and the true signal is dominated by a
multiple of the `p -norm of sampling error.
For our SDS, the upper bound estimate in (III.1) follows
from (II.7) and Proposition II.1. Following the argument in
[16], we can prove that the left-hand inequality in (III.1) holds
if the sensing matrix S has `2 -stability, c.f. [28], [29].
Proposition III.1. If an SDS satisfies (II.2), (II.3), (II.4), (II.5)
and (II.6), and it has `2 -stability, then it has `p -stability for
all 1 ≤ p ≤ ∞.
By Proposition III.1, the `p -stability of an SDS reduces to its
` -stability. If the size of our SDS is limited, its `2 -stability can
be verified whether smallest eigenvalues of ST S is positive.
But the above procedure is impractical as our SDS in mind
may have huge amounts of sensing devices.
Denote the identity matrix by I. For λ ∈ Γ and positive
integer N , one may verify that
2
N
N
2N
N
χ2N
λ Sχλ = Sχλ + (I − χλ )(SN − S)χλ ,
where the truncation operator χN
λ is defined by
χN
λ : (c(γ))γ∈Γ 7−→ c(γ)χB(λ,N ) (γ) γ∈Γ .
(III.2)
(III.3)
(III.4)
where C is an absolute constant, then the SDS has `2 -stability.
The requirements (III.3) and (III.4) can be rewritten as
inf
inf
λ∈Γ χN0 c6=0
λ
N0
0
kχ2N
λ Sχλ ck2
0
kχN
λ ck2
−(α−d)/(α−d+1)
≥ CkSkJα (Γ) N0
.
(III.5)
Then the `2 -stability of an SDS of huge size reduces to
verifying whether the low stability bound of subsystems
N0
d
0
χ2N
λ Sχλ of size O(N0 ) satisfies (III.5) or not. The above
local criterion is perfect for designing a robust SDS and for
confirming `p -stability of an SDS when some sensing devices
are dysfunctional.
IV. D ISTRIBUTED SIGNAL RECONSTRUCTION ALGORITHM
In a centralized system, the original signal f of the form
(I.1) is reconstructed from solving linear equations (I.3). For
an SDS with `2 -stability, the least-square solution of linear
equations (I.3) is given by
c = (ST S)−1 ST y.
But it is expensive to find pseudo-inverse of the sensing matrix
S for an SDS with huge amounts of sensing devices.
We recall from Theorem III.2 that quasi-main submatrices
2N
2
χ4N
λ Sχλ , λ ∈ Γ, have uniform ` -stability for large N . This
inspires us to solve linear equations
2N
4N
χ4N
λ Sχλ cλ,N = χλ y, λ ∈ Γ,
(IV.1)
of size O(N d ). Significantly, their least squares solutions cλ,N
provide an approximation of the true solution c of linear
equations (I.3) inside the ball B(λ, N ),
−α+d
kχN
kck∞ ,
λ (cλ,N − c)k∞ ≤ C(N + 1)
(IV.2)
where C is an absolute constant. Next we use those local
estimates cλ,N , λ ∈ Γ, to generate a global estimate
P
χN cλ,N
(IV.3)
c∗ = Pλ∈Γ λ
λ∈Γ χB(λ,N )
of the true solution c. For large N , we observe from (IV.2)
that c∗ obtained from (IV.1) and (IV.3) provides a good
approximation to the true solution c,
kc∗ − ck∞ ≤ C(N + 1)−α+d kck∞ .
(IV.4)
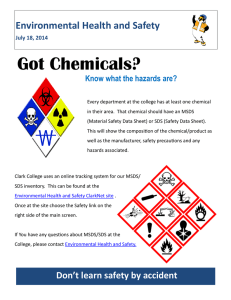
Fig. 1. Signal f =
P
1≤l≤L
cl φl with cl ∈ [0, 1], 1 ≤ l ≤ L, being
randomly selected.
Based on the above observation, we propose the following
predictor-corrector algorithm for an SDS with `2 -stability: Let
c ∈ `∞ (Γ) and y = Sc be sampling data vector. Set initial
c0 = 0 and y0 = y, and define cn , yn , n ≥ 1, iteratively by
zn;λ,NP= Rλ,N yn , λ ∈ Γ,
χN zn;λ,N
,
zn = Pλ∈Γ χλB(λ,N
)
(IV.5)
λ∈Γ
c
= cn + zn ,
n+1
yn+1 = yn − Szn ,
where
T 4N
2N
Rλ,N = χ2N
λ S χλ Sχλ
−1
Theorem IV.1. If an SDS satisfies (II.2), (II.3), (II.4), (II.5)
and (II.6), and it has `2 -stability. Then for large N satisfying
(IV.6)
the sequence cn , n ≥ 0, in (IV.5) converges to c exponentially,
kcn − ck∞ ≤ r1n kck∞ .
Let us have innovative positions distributed almost uniformly at the circle,
n
L
o
L
cos θl , sin θl , 1 ≤ l ≤ L ,
Γ = γl :=
5
5
and Gaussian signal generators at every innovation position,
φl (x, y) = exp(−|(x, y) − γl |2 /2), 1 ≤ l ≤ L,
T 4N
χ2N
λ S χλ .
r1 := C(N + 1)−α+d < 1,
V. N UMERICAL S IMULATIONS
(IV.7)
Proof. The reader may refer to [16] for detailed arguments.
where θl = 2π(l + rl )/L, and rl , 1 ≤ l ≤ L, are random
numbers in [−1/4, 1/4]. Illustrated in Figure 1 is a signal of
the form (I.1).
Consider an SDS with ideal sampling on every sensing
location. Then the distance between two nearest neighboring
devices is about one, and the sensing matrix is given by
S = exp(−|γl0 − γl |2 /2) 1≤l0 ,l≤L .
For our distributed algorithm (IV.5), denote by
EN := max |cl − c̃l |, N ≥ 2,
1≤l≤L
The implementation of the algorithm (IV.5) can be
distributed for devices in an SDS in each iteration.
(i) For the device located at λ ∈ Γ, first get data yn (γ) from
neighboring devices located at γ ∈ B(λ, 4N ), and then
generate local correction zn,λ,N ;
(ii) Then send the correction zn,λ,N to neighboring devices
located at γ ∈ B(λ, N ) and compute the correction zn .
(iii) Next add the correction zn to old prediction cn to create
new prediction cn+1 .
(iv) Send zn (λ) to neighboring devices at γ ∈ B(λ, M ) and
compute new correction yn+1 on sampling data, where
M is the bandwidth of the sensing matrix S.
Therefore the predictor-corrector method (IV.5) is a distributed
algorithm. Under the assumption that the telecommunication
cost between two sensing devices of an SDS is proportional to
their distance, we require about O(N 2d + M ) computing capacity and data storage, and we will spend about O((N +M )d )
on telecommunication for each device to implement (IV.5).
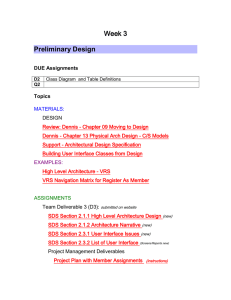
the maximal reconstruction error of amplitudes, where c̃l , 1 ≤
l ≤ L, are reconstructed amplitudes in the first iteration. For
the original signal in Figure 1, we see from Figure 2 that the
first iteration in the algorithm (IV.5) with N = 4 has provided
a good approximation already.
Fig. 2. Plotted is the difference of the original signal in Figure 1 and
the reconstructed signal using the algorithm (IV.5) with N = 4. The
maximal amplitude error E4 is about 0.2364.
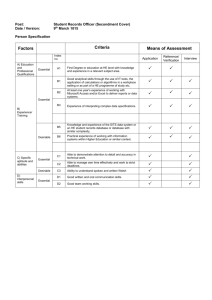
Fig. 3. The reconstruction error of maximal amplitude EN has almost
exponential decay on N ≥ 2, a better numerical result than the
polynomial decay theoretically guaranteed in Theorem IV.1.
By (IV.6), the number of iteration required to reach accuracy
is about O(ln(1/)/ ln N ). So we may select small N for
an SDS with very limited computing and telecommunication
capabilities, while in general we would like to use a reasonable
N for fast reconstruction, see Figure 3.
Even though we have not discussed robustness and
distributed algorithm of an SDS when it has some sensing
devices dysfunctional, our numerical simulation shows that
the algorithm (IV.5) for signal reconstruction works well in
that scenario, see Figure 4.
Plotted is the difference of the original signal in Figure 1 and the reconstructed signal using the algorithm (IV.5)
with N = 4, L = 250, and sensing devices located at γl ,
l = 51, 57, 68, 79, 85, 98, 113, 131, 153, 166, 176, 188, 200, 208 being dysfunctional. The maximal amplitude error E4 is about 0.2504.
Fig. 4.
ACKNOWLEDGMENT
This work is partially supported by the National
Natural Science Foundation of China (Nos. 11201094
and 11161014), Guangxi Natural Science Foundation
(2014GXNSFBA118012), and the National Science
Foundation (DMS-1109063 and 1412413).
R EFERENCES
[1] M. Vetterli, P. Marziliano and T. Blu, Sampling signals with finite rate
of innovation, IEEE Trans. Signal Process., 50(2002), 1417–1428.
[2] D. Donoho, Compressive sampling, IEEE Trans. Inform. Theory,
52(2006), 1289–1306.
[3] Q. Sun, Non-uniform average sampling and reconstruction of signals
with finite rate of innovation, SIAM J. Math. Anal., 38(2006), 1389–
1422.
[4] P. L. Dragotti, M. Vetterli and T. Blu, Sampling moments and reconstructing signals of finite rate of innovation: Shannon meets Strang-Fix,
IEEE Trans. Signal Process., 55(2007), 1741–1757.
[5] P. Shukla and P. L. Dragotti, Sampling schemes for multidimensional
signals with finite rate of innovation, IEEE Trans. Signal Process.,
55(2007), 3670–3686.
[6] Q. Sun, Frames in spaces with finite rate of innovations, Adv. Comput.
Math., 28(2008), 301–329.
[7] M. Mishali, Y. C. Eldar and A. J. Elron, Xampling: signal acquisition
and processing in union of subspaces, IEEE Trans. Signal Process.,
59(2011), 4719–4734.
[8] H. Pan, T. Blu and P. L. Dragotti, Sampling curves with finite rate of
innovation, IEEE Trans. Signal Process., 62(2014), 458–471.
[9] Q. Sun, Localized nonlinear functional equations and two sampling
problems in signal processing, Adv. Comput. Math., 40(2014), 415–
458.
[10] C. Cheng, Y. Jiang and Q. Sun, Sampling and Galerkin reconstruction
in reproducing kernel spaces, arXiv:1410.1828
[11] M. Unser, Sampling -50 years after Shannon, Proc. IEEE, 88(2000),
569–587.
[12] A. Aldroubi and K. Gröchenig, Nonuniform sampling and
reconstruction in shift-invariant spaces, SIAM Rev., 43(2001),
585–620.
[13] M. Z. Nashed and Q. Sun, Sampling and reconstruction of signals in
a reproducing kernel subspace of Lp (Rd ), J. Funct. Anal., 258(2010),
2422–2452.
[14] B. Adcock, A. C. Hansen and C. Poon, Beyond consistent reconstructions: optimality and sharp bounds for generalized sampling, and
application to the uniform resampling problem, SIAM J. Math. Anal.,
45(2013), 3114–3131.
[15] P. Petersen, Riemannian Geometry, Springer, 2006.
[16] C. Cheng, Y. Jiang and Q. Sun, Spatially distributed sampling and
reconstruction of signals on a graph, in preparation.
[17] S. Jaffard, Properiétés des matrices bien localisées prés de leur diagonale et quelques applications, Ann. Inst. Henri Poincaré, 7(1990),
461–476.
[18] Q. Sun, Wiener’s lemma for infinite matrices with polynomial offdiagonal decay, C. Acad. Sci. Paris Ser I, 340(2005), 567–570.
[19] K. Gröchenig and M. Leinert, Symmetry and inverse-closedness of
matrix algebras and functional calculus for infinite matrices, Trans.
Amer. Math. Soc., 358(2006), 2695–2711.
[20] Q. Sun, Wiener’s lemma for infinite matrices, Trans. Amer. Math. Soc.,
359(2007), 3099–3123.
[21] Q. Sun, Stability criterion for convolution-dominated infinite matrices,
Proc. Amer. Math. Soc., 138(2010), 3933–3943.
[22] Q. Sun and J. Xian, Rate of innovation for (non-)periodic signals
and optimal lower stability bound for filtering, J. Fourier Anal. Appl.,
20(2014), 119–134.
[23] M. Pawlak, E. Rafajlowicz and A. Krzyzak, Postfiltering versus prefiltering for signal recovery from noisy samples, IEEE Trans. Inform.
Theory, 49(2003), 3195–3212.
[24] S. Smale and D.X. Zhou, Shannon sampling and function
reconstruction from point values, Bull. Amer. Math. Soc., 41(2004),
279–305.
[25] I. Maravic and M. Vetterli, Sampling and reconstruction of signals with
finite rate of innovation in the presence of noise, IEEE Trans. Signal
Process., 53(2005), 2788–2805.
[26] Y. C. Eldar and M. Unser, Nonideal sampling and interpolation
from noisy observations in shift-invariant spaces, IEEE Trans. Signal
Process., 54(2006), 2636–2651.
[27] N. Bi, M. Z. Nashed and Q. Sun, Reconstructing signals with finite
rate of innovation from noisy samples, Acta Appl. Math., 107(2009),
339–372.
[28] A. Aldroubi, A. Baskakov and I. Krishtal, Slanted matrices, Banach
frames, and sampling, J. Funct. Anal., 255(2008), 1667–1691.
[29] C. E. Shin and Q. Sun, Stability of localized operators, J. Funct. Anal.,
256(2009), 2417–2439.