Document 12909669
advertisement

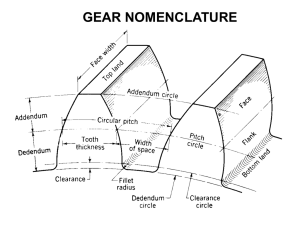
International Journal of Engineering Trends and Technology (IJETT) – Volume 4 Issue 9- September 2013 Parametric Modelling of Straight Bevel Gearing system and Analyze the Forces and Stresses by Analytical Approach A.V.Ramana Rao1, CH.Bhanu Prakash2, M.N.V.S.A.Sivaram.K3 1 Asst.Prof., Mechanical Engineering Department, Vishnu Institute of Technology, Bhimavaram, A.P, INDIA Asst.Prof., Mechanical Engineering Department, Vishnu Institute of Technology, Bhimavaram, A.P, INDIA 3 Asst.Prof., Mechanical Engineering Department, Vishnu Institute of Technology, Bhimavaram, A.P, INDIA 2 Abstract— The three-dimensional parametric modelling of straight bevel gear pair using CATIA V5 software system. Gears modelling are based on geometric and perspective transformation. Parameter modelling application makes possible the control of created 3D gear model through previous defined parameter which is based on relations and geometric constraints. The final shape of gear changes by changing of values of parameters, and that makes model creation in short time and analysis of forces and stress by analytical approach. Modelling methodology and functionality that is described by selected example can be used in cone crusher. Keywords— Bevel gears, parametric modelling, CATIA V5. I. INTRODUCTION A bevel gear is one of the most fundamental types of gear; it is widely used in aircrafts, automobiles and heavy engineering machines, etc... Two important concepts in gearing are pitch surface and pitch angle. The pitch surface of a gear is the imaginary toothless surface that you would have by averaging out the peaks and valleys of the individual teeth. The pitch surface of an ordinary gear is the shape of a cylinder. The pitch angle of a gear is the angle between the face of the pitch surface and the axis. The most familiar kinds of bevel gears have pitch angles of less than 90 degrees and therefore are cone-shaped. This type of bevel gear is called external because the gear teeth point outward. The pitch surfaces of meshed external bevel gears are coaxial with the gear shafts; the apexes of the two surfaces are at the point of intersection of the shaft axes. Bevel gears that have pitch angles of greater than ninety degrees have teeth that point inward and are called internal bevel gears.Bevel gears that have pitch angles of exactly 90 degrees have teeth that point outward parallel with the axis and resemble the points on a crown. That's why this type of bevel gear is called a crown gear. Straight bevel gears are the most economical of the various bevel gears, owing to their ease of manufacture. The drive unit for cone crusher is affected by the frequent failures of bevel gear pair at higher loads. So these gears are again redesigned but the surface profile of the gear teeth is relatively difficult to draw accurately. . Either of these will require an exact CAD model ISSN: 2231-5381 of the tooth geometry, and approximate methods will not always meet the requirements. II. GEAR TERMINOLOGY (1) Pitch circle: Theoretical circle upon which all gear calculations are usually based. Pitch circles of mating gears are tangent to one another. (2) Pitch diameter: The diameter of the pitch circle. (3) Number of teeth: The number of teeth on the gear. (4) Diametric pitch: The number of teeth of a gear per inch of its pitch diameter. (5) Module: The ratio of pitch diameter to the number of teeth. It is reciprocal of the diametric pitch. The pitch diameter is specified either in inches or millimeters. (6) Pressure angle: The angle through which forces are transmitted between meshing gears. It is either 14.5°or 20°. It defines the geometry of the gear tooth and also determines the diameter of the base circle. (7) Addendum: The amount of tooth that protrudes above the pitch circle (from top land to pitch circle) (8) Dedendum: The Radial distance from the pitch circle to the bottom of the tooth space. (9) Clearance circle: the circle tangent to the addendum circle of the mating gear. (10) Clearance: the distance between the tooth top surface and the bottom surface of a mating gear. Fig.1 Geometry of straight bevel gear http://www.ijettjournal.org Page 3837 International Journal of Engineering Trends and Technology (IJETT) – Volume 4 Issue 9- September 2013 III.GEOMETRY OF STRAIGHT BEVEL GEARS The geometry of bevel gears is shown in Fig.2. They have teeth that are straight and tapered, if extended inward, the teeth would intersect at a common point. The shaft angle is 900, which is the sum of the pitch cone angle of gear and pinion. In order to secure uniform bearing along the tooth, the face width is generally not made longer than one-third of the pitch cone length R, usually b=φR.R. The gear ratio is i=n1/n2, 1270/400 = 3.175 (1) Fig. 4 Involute curve An involute curve is the loci of a point on the generating line, as the line rolls without slipping along a base circle, see Fig.4. Gear teeth are cut in the shape of an involute curve between the base and the addendum circles, while the part of the tooth between the base and dedendum circles is generally a radial line. In Cartesian coordinate system, the involute curve is expressed as follows: x = rb(cosθ + θsinθ) y = rb(sinθ - θcosθ) Where rb is radius of the base circle, θ is the spread angle. Fig.2 Geometry of straight bevel gear IV.PARAMETRIC DESIGN OF STRAIGHT BEVEL GEARING SYSTEM Determination of Coordinates control points: Before cearing parametric design, some coordinates points must be determined, according to the design variables. Thus, a Cartesian coordinate system was set up, as shown in Fig.5, whose origin is at the apex of the back cone. In this coordinate system all the control points were determined, referring to Fig.5 and Table-1. Fig. 3 Back cone and shape of the teeth As shown in Fig.2 and Fig.3, the size and shape of the straight bevel gear’s teeth are defined at the large end, on the back cone, which have standard involute profiles. re = d/2 cosδ (2) The length of back cone has relationship with the pitch diameter as equation -2; it is equal to the pitch circle radius of bevel gear’s virtual spur gear. ISSN: 2231-5381 Fig. 5 Cross section of a bevel gear http://www.ijettjournal.org Page 3838 International Journal of Engineering Trends and Technology (IJETT) – Volume 4 Issue 9- September 2013 TABLE-1 Control points coordinates determination Points x O’ O A B C 0 x0 = 0 xa = df2 / 2 xb = da2 / 2 xc = (1-φR) * cosδ2 + xd y 0 y0 = R/cos δ2 ya = df2 * i /2 yb = da2 * i/2 yc = (1-φR) * h * sinδ2 + yd D xd = (1-φR) * df / 2 yd = ye E xe = 0 ye = (y0 – ya) * φR + ya F xf = 0 yf = yg G xg = (1)* yg = (1) xa * ya According to the above parametric equations, design systems for straight bevel gears were achieved. The cone crusher drive unit straight bevel gear and straight bevel gear pinion were modelled as Shown in Fig. 6&7. Fig. 6 Parametric modelling of Straight bevel pinion gear and straight bevel gear wheel Fig. 7 Isometric views of straight bevel gear pair ISSN: 2231-5381 V.DESIGN OF STRAIGHT BEVEL GEAR PAIR BY ANALITICALLY In straight bevel gears the teeth are straight and parallel to the generators of the cone. This is the simplest form of bevel gear. It resembles a spur gear, only conical rather than cylindrical. TABLE-2 Design data for straight bevel gear pair S.No Parameter pinion Gear 1 No. of teeth (z) 17 54 2 Module (m) 15.5613 mm 3 Pressure angle (α) 200 4 Shaft angle ∑ = δ1 + δ2 = 900 5 Face width (b) 180 mm 6 Speed (n) 7 Power (P) 1270 rpm 400 rpm 200 kW Design of straight bevel pinion gear: In the present cone crusher, the drive system consists of straight bevel gear pair in which the pinion gear acts as a drive gear, transmits power of 200kW with speed 1270 rpm, having 17 teeth, normal module of 15.5613 mm and spiral angle is 00. Calculations of pinion gear: Transmission ratio (i) = 3.175 Tooth ratio ratio (u) = 3.176 Pitch cone angle (δ1) = 17.4750 Middle pitch cone distance (Rm) = 440.478 mm Outer pitch cone distance (Ra) = 530.478 mm Inner pitch cone distance (Ri) = 350.478 mm Outer transverse module (mto) = 18.740 mm Middle transverse module (mtm) = 15.5613 mm Inner transverse module (mti) = 12.381 mm Outer normal module (mno ) = 18.7408 mm Middle normal module (mnm) = 15.5613 mm Inner normal module (mni) = 12.3818 mm Outer pitch diameter (d1) = 318.593 mm Middle pitch diameter (dm1) = 264.542 mm Inner pitch diameter (di1) = 210.49 mm Addendum (ha1) = 21.926 mm Similarly addendum (middle and inner) = 18.263 mm, 15.164 mm respectively. Dedendum (hf1) = 13.455 mm Similarly dedendum (middle and inner) = 11.172 mm, 9.276 mm respectively. Outer tip circle diameter (da1) = 365.786 mm Middle tip circle diameter (dam1) = 303.370 mm http://www.ijettjournal.org Page 3839 International Journal of Engineering Trends and Technology (IJETT) – Volume 4 Issue 9- September 2013 Inner tip circle diameter (dai1) = 240.1 mm Base circle radius of the involute spiral (Br) = 440.478 mm Middle transverse pitch (ptm) = 48.887 mm Diameteral pitch (pd) = 0.0533 mm Circular pitch (pc) = 58.876 mm Tooth thickness on outer PCD (tpo) = 34.590 mm Tooth thickness on inner PCD (tpi) = 22.853 mm Clearance (c) = 2.925 mm Virtual number of tooth (zv1) = 17.822 The correction factor of the virtual toothing (xv1) = +0.3200 Design of straight bevel gear wheel: In the present cone crusher, the drive system consists of straight sided bevel gear pair in which the gear wheel acts as a drive gear, transmits power of 200kW with speed 400 rpm, having 54 teeth, normal module of 15.5613 mm and spiral angle of 00. Calculations of gear wheel: Transmission ratio (i) = 3.175 Tooth ratio ratio (u) = 3.176 Pitch cone angle (δ1) = 17.4750 Middle pitch cone distance (Rm) = 440.478 mm Outer pitch cone distance (Ra) = 530.478 mm Inner pitch cone distance (Ri) = 350.484 mm Outer transverse module (mto ) = 18.740 mm Middle transverse module (mtm) = 15.5613 mm Inner transverse module (mti) = 12.381 mm Outer normal module (mno) = 18.7408 mm Middle normal module (mnm) = 15.5613 mm Inner normal module (mni) = 12.3818 mm Outer pitch diameter (d2) = 1012.003 mm Middle pitch diameter (dm2) = 840.310 mm Inner pitch diameter (di2) = 668.617 mm Addendum (ha2) = 9.9326 mm Similarly addendum (middle and inner) = 8.247 mm, 6.848 mm respectively. Dedendum (hf2) = 25.450 mm Similarly dedendum (middle and inner) = 21.132 mm, 17.547 mm respectively. Outer tip circle diameter (da2) = 1019.657 mm Middle tip circle diameter (dam2) = 846.25 mm Inner tip circle diameter (dai2) = 673.674 mm Base circle radius of the involute spiral (Br) = 440.478 mm Middle transverse pitch (ptm) = 48.887 mm Diameteral pitch (pd) = 0.0533 mm Circular pitch (pc) = 58.876 mm Tooth thickness on outer PCD (tpo) = 24.590 mm Tooth thickness on inner PCD (tpi) = 16.045 mm Clearance (c) = 2.925 mm Virtual number of tooth (zv1) = 179.826 The correction factor of the virtual toothing (xv1) = -0.3200 Forces and stress analysis of the straight bevel gear pair: For force analysis of a pair of mating straight bevel gears, it is assumed that the total force FN acting on straight bevel gear teeth is resolved into three mutually perpendicular components, they are: 1. Tangential tooth load (ft) 2. Axial thrust (fa) ISSN: 2231-5381 3. Radial separating force (fr) The tangential tooth load (ft): ft = (2T1/dm1) x 1000 N Here T is torque on bevel gear pair. 9550 P1 T n1 The axial thrust (fa): ft f a cos m tan sin sin m cos The radial separating force (fr): ft tan cos sin m sin f r cos m Calculation of stresses in straight bevel gear pair: In general, for contact stress calculations in case of straight bevel gear pair, it is sufficient to check the stress at the pitch point P to ensure the Hertzian pressure at the pitch point is within the allowable limit. ym y p ft b dm (u 2 1) u In the above equation ym is the material coefficient; yp is the pitch point coefficient. VI .RESULTS & DISCUSSION TABLE-3 Determined forces and stresses of straight bevel gear pair S.No Parameter Pinion Gear Units 1 Torque 1503.937 4775 N-m 2 Tangential force 11370.11 N 3 Normal force 12099.82 N 4 Axial force 1242.70 3947.39 N 5 Radial force 3947.39 1242.70 N 6 Contact stresses 134.5 75.5 MPa In this study, structural features of straight bevel gear were analyzed; design variables were specified, and then the interactive interface was designed; Further, a Cartesian coordinate system was set up and coordinates of control points were determined according to its geometric relationship. The parametric design of straight bevel gear has been implemented, running results showed that the parametric modeling of bevel gear was speedy and accurate, which will facilitate the 3D http://www.ijettjournal.org Page 3840 International Journal of Engineering Trends and Technology (IJETT) – Volume 4 Issue 9- September 2013 modeling of straight bevel gear pair in CATIA and the appropriate forces were found which are acting on straight bevel gear pair and analyze the contact stresses by analytical approach. However, the methodology proposed in this paper is mainly addressed for straight bevel gears which intersect at right angle. VII .CONCLUSION [12] Karam F., Kleismit C.: Using Catia V5, Thomson Learning, 2004. [13] Amirouche, F.: Principles of Computer-Aided Design and Manufacturing, 2nd edition, Prentice Hall, Upper Saddle River, New Jersey, 2004. In geometric gear modelling, we do not have to create shape directly, but, instead of that, we can put parameters integrated in geometric and/or dimensional constraints. We get resulted solid straight bevel gear model by parameters changing. In this way, designer can create more alternative designing samples. Time used for creating more designing samples is reduced for 50%, by parameter modelling. These results can be seen in reducing the production cost, and the production also increases. In that way, better profit and price of products are lower. This type of functionality makes possible flexibility and it could be used in combination with traditional geometric modelling approach. REFERENCES [1] HIROFUMI SENTOKU AND TOMONOBU ITOU, ‘‘Study on transmission error of straight bevel gears’’, JSME International Journal Series C, Vil. 47, No.1 (2004), pp.391-397 [2] XU Jie.Research on Gear’s 3D Parametrical Design Based on Solidworks.Machinery & Electricity Messages[J] ,2010.30, PP130-131. [3] LI Jun-wei, PAN Yu-tian. Parametric Design and Finite Element Analysis of Straight Bevel Gear Based on SolidWorks[J].Modern [4] Mathematic Manual Compiling Group. Mathematic Manual[M]. Beijing:Higher Education Press,1979,PP380381. [5] Robert L. Norton, “Machine Design an Integrated Approach” Pearson publication, Second Edition, ISBN 978-81-317-0533-9. [6] Gitin M Maitra, “Handbook of Gear Design”, Tata McGraw-Hill, Second Edition, ISBN 0-07-460237-3. [7] Shigley, “Mechanical Engineering”, McGraw−Hill Primis, Eighth Edition, ISBN: 0−390−76487−6. [8] R. J. Roark, Formula for Stress and Strain, 4th edition, McGraw-Hill, New York, 1965. [9] Faydor L. Ltivin, Alfonso Fuentes, Qi Fan, et al. Computerized design, simulation of meshing, and contact and stress analysis of face-milled format generated spiral bevel gears. Mechanism and Machine Theory2002, 21:775-786. [10] CATIA Web-based Learning Solutions Version V5 Release 18 Windows, Dassault Systemes, 2007. [11] CATIA Solutions Version V5 Release 18 English Documentation, Dassault Systemes, 2007. ISSN: 2231-5381 http://www.ijettjournal.org Page 3841