22.54 Neutron Interactions and Applications (Spring 2004) Chapter 18 (5/6/04)
advertisement
 Chapter 18 (5/6/04)")
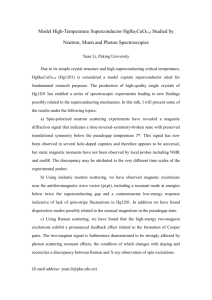
22.54 Neutron Interactions and Applications (Spring 2004) Chapter 18 (5/6/04) The Dynamic Structure Factor in Neutron Inelastic Scattering ________________________________________________________________________ References -Jean-Pierre Boon and S, Yip, Molecular Hydrodynamics, McGraw-Hill 1980 (Dover reprint 1991). D. E. Parks, M. S. Nelkin, J. R. Beyster, N. F. Wikner, Slow Neutron Scattering and Thermalization (W. A. Benjamin, New York, 1970). M. M. R. Williams, The Slowing Down and Thermalization of Neutrons (North Holland, Amsterdam, 1966). ________________________________________________________________________ Our objective in this lecture is twofold, first to formulate the theory of the double differential scattering cross section d 2σ / d ΩdE for thermal neutrons, and then to discuss the concept of the scattering law S (α , β ) , the nuclear data available from standard evaluated nuclear data files. In the broader context of theory of thermal neutron scattering, the scattering law is denoted as S (Q,ω ) and known as the dynamic structure factor. We prefer the latter term because of the importance of this quantity in the physics of condensed matter and the field of nonequilibrium statistical mechanics. Neutron Scattering by a System of Nuclei Now that we have developed in the last chapter a suitable potential for use in the Born Approximation, we will proceed to set up the double differential scattering cross section for quantitative calculation. Notice that the problem is more than neutron scattering by an isolated nucleus, it is the interaction between a neutron and a system of scattering nuclei. This difference is that previously we could solve the problem of twobody collisions by reducing it to an effective one-body problem, this is no longer possible (or desirable) when there is more than one scattering nucleus involved. The Schrodinger wave equation we now need to solve describes a many-body system, and therefore has the complexities associated with any many-body problem. If one is to obtain a tractable solution, some key approximation must be introduced. This is why we need the simplifications realized by the Born Approximation and the Fermi pseudopotential. equation for the system (neutron plus scattering The many-body Schrodinger nuclei) is of the form p2 2m + H s + V Ψ (r , R) = εΨ (r , R) (18.1) The first term is the kinetic energy operator of the neutron, Hs is the Hamiltonian of the system of scattering nuclei, and V is the neutron-nucleus interaction (for which we will 1 take to be the Fermi pseudopotential when the time comes). The many-body wavefunction depends on the neutron coordinate r and the coordinates of the N scattering nuclei in the target system, denoted here by R , R = ( R1 , R 2 ,...R N ) . In (18.1) ε is the total energy in the problem, neutron plus scattering system, which is a constant. When the neutron is far from the target there is no interaction, therefore the constant is the sum of the kinetic energy of the neutron and the energy of the scattering system (kinetic energy of the nuclei and their interaction energy). We will not need to specify what is Hs until later when we discuss explicit model calculations. For now it is sufficient to regard Hs as known in the sense that its eigenfunctions and eigenvalues exist, Hs n = εn n (18.2) where the eigenfunction in state n is denoted by the ket n . It is also customary to assume that the states n form a complete set, in which case n becomes an appropriate for an expansion, Ψ (r , R) = ∑ψ n (r ) n (18.3) n The coefficient of expansion, ψ n ( r ) , is the neutron wave function when the target system is in the nth state. It satisfies an equation obtained by inserting (18.3) into (18.1) and using the orthnormality property of the eigenstates n , (∇ 2 + kn2 )ψ n (r ) = 2m ∑ n V n ' Ψ n ' (r ) =2 n ' (18.4) with = 2 kn2 = ε − εn 2m (18.5) Eq.(18.5) is simply the statement of energy conservation, the total energy is a constant, and it is divided between the kinetic energy of the neutron and the energy of the target. When one changes, the other must change correspondingly. This means that when the neutron gains or loses energy that amount must come from or given to the target. Eq.(18.4) is a one-body equation, an equation describing the neutron in a state that corresponds to the target being in the nth state. Whether this equation is difficult or easy to solve depends on the matrix elements Vnn ' = n V n ' . For now we proceed without saying anything more about these quantities. We observe that since (18.4) is of the same form as wave equation (17.1), we can treat it in the same manner as before. Thus, we can write the solution to (18.4) as the sum of a homogeneous solution and a particular solution, the latter involving the convolution 2 of the inhomogeneous (source) term on the right hand side of (18.4) with an appropriate Green's function. In the asymptotic region (r >> ro) this equation reads ψ n (r ) ~ δ nn ei k ⋅r + i o m eiknr 2π = 2 r ∑ ∫ d r 'e 3 Vnn ψ ' n ' ( r ') − ikn rˆ⋅r ' (18.6) n' In writing (18.6) we have specified that the initial states of the target are no and n, respectively. That is to say, prior to the scattering the neutron approaches the target with a kinetic energy Ei = = 2 ki2 / 2m and the target is in the state no. After the scattering the neutron leaves with energy E f = = 2 kn2 / 2m with the target being in the state n. Applying the first Born Approximation to (18.6) and comparing the result with the boundary condition (4.7) or (17.23), we obtain an expression for the scattering amplitude, f non (θ ) = − m iQ ⋅r d 3re n Vnno (r ) 2 ∫ 2π = (18.7) where Qn = k i − k n (18.8) and k n = kn rˆ . Now we can bring in the Fermi pseudopotential for the neutron-nucleus interaction, V (r , R1 ,...R N ) = 2π = 2 N ∑ aAδ (r − R A ) m A=1 (18.9) Notice that this is a many-body interaction potential. While the neutron interacts with all the nuclei in the target, the effect of each interaction is additive because the interaction is extremely short ranged. If for some reason the interactions are collective in nature, then the problem of neutron scattering would become even more complicated and probably insoluble. Notice also we have associated with each nucleus its own scattering length, thus allowing for the possibility that the scattering length can vary from one nucleus to the next, which would be the case if the nuclei are not all the same. Thus if two nuclei have different spin orientations, then it is to be expected that they would not scatter in the same way. Besides spin, different nuclear isotopes also can give rise to different scattering lengths. This variation of the scattering length is the reason why we need to distinguish between two kinds of neutron scattering, coherent and incoherent (see below). Taking the matrix elements of (18.9) amounts to multiplying (18.9) by the bra state n and the ket state no , and integrating the product over the coordinates of the scattering nuclei. Without saying what these states are and doing the integration, we can interchange the matrix element integration with the r-integral indicated in (18.7). 3 f non (θ ) = −∑ aA n e iQ n ⋅RA no (18.10) A We see that the matrix element operation has been shifted from the interaction potential to the the exponential factor, exp(iQ n ⋅ R A ) , as a result of the impulse nature of the pseudopotential. We will come to appreciate later the significance of this step of the theoretical development. Once we have the scattering amplitude, we can immediately write down the angular differential cross section (dσ / d Ω) n n for the scattering process where the initial o and final states of the target are no and n, respectively. Since in an actual experiment, one cannot control the state of the target either before or after scattering, the best one can do is to average over some thermal distribution of initial states (like a Maxwellian distribution), and sum over all possible final states. Thus the angular differential cross section that one should compare with experiment is given by the expression, 2 dσ k 1 f non (θ ) = ∑∑ P(no ) n d Ω n no ki N (18.11) where P(no) is the probability that the target is initially in state no. We will take this to be the Maxwell distribution, e −ε n / kBT P (n) = ∑ e−ε s / kBT (18.12) s In (18.11) the factor (kn/ki) arises from the definition of the cross section when the incident and outgoing wave vectors no longer have the same magnitude (this is one consequence of inelastic scattering). Recall from Chap1 that the cross section is essentially the ratio of scattered current to incident current. Since current is density times speed, this is why the cross section is proportional to the ratio of outgoing to incoming speeds. The factor of (1/N) arises because (18.11) gives the cross section per nucleus (we have N nuclei in the target). Eq.(18.11) with the scattering amplitude given by (18.10) is still quite formal. But it is now the complete expression which one can actually evaluate to obtain the angular distribution of thermal neutron scattering. The Double Differential Scattering Cross Section The double differential scattering cross section, d 2σ / d ΩdE , as the name implies in differential in both the solid angle of scattering and the energy of the scattered neturon. Imagine a scattering experiment such as the one schematically depicted in Fig. 17.2. What one can measure at the detector is the intensity of scattering per unit solid angle and per unit final energy. Given that we have an expression for the scattering intensity per unit solid angle, we can modify that result to ensure that the proper energy exchange 4 occurs and thus obtain the scattering intensity per unit solid angle and final neutron energy. The appropriate modification is d 2σ 1 kf = d ΩdE N ki ∑ P(n ) o nno 2 f non (θ ) δ ( E f + ε n − Ei − ε no ) (18.13) The argument of the delta function is nothing but the statement of energy conservation, the sum of neutron and target before and after the scattering must be equal. Eq.(18.13) is the basic result in the theory of thermal neutron scattering. We will make use of it in several ways from here on. Space-Time Representation It is useful to rewrite (18.13) in a representation that brings out more the physical content of the double differential scattering cross section. We make use of a particular representation of the delta function, 1 δ ( x) = 2π ∞ ∫ dte itx (18.14) −∞ Applying this to (18.13) and performing a series of rearrangements of the various exponential factors, taking care that the positions of the nuclei become time-dependent Heisenberg operators which may not commute with each other, one can obtain the following result (details of this derivation will be supplied later), d 2σ = ( E f / Ei )1/ 2 a 2 S (Q,ω ) d ΩdE f (18.15) 1 iQ⋅R (0) − iQ⋅R A ' ( t ) <e A e > ∑ N A ,A ' (18.16) where S (Q,ω ) = 1 2π ∞ ∫ dte −∞ iω t Eq.(18.15) shows that the cross section can be separated into three parts. The first factor is merely kinematical, reflecting the fact that we are dealing with the ratio of two currents. The second factor, the scattering length, represents the nuclear physics aspect of the scattering; it can vary with spin orientation and isotope distribution. The third factor, S (Q, ω ) , defined in (18.16) is the quantity that gives the double differential cross section all the complexity and interest of a many-body problem. We will come back to this point soon. For now, we just note that S (Q, ω ) has been given the name of dynamical structure factor. It embodies all the information that one can extract by scattering on the structure and dynamics of the nuclei in the target system. The function is the reason that thermal neutron scattering has become one of the most important 5 experimental techniques for probing the structure and dynamics of atoms and molecules in condensed matter, from physics to chemistry to biology. Coherent and Incoherent Scattering It is important to distinguish between two processes of thermal neutron scattering, coherent and incoherent. The distinction comes about because the scattering length of a nucleus depends on the spin orientation of the nucleus, if the nucleus has a nonzero spin, and also on the which isotope is the nucleus, in the case that the target is a distribution of several isotopes. We now explain in simple terms what goes into each process. Consider the scattering of an incident plane wave by a system of individual scatterers, two of which are shown in the sketch, Fig. 18.1. The intensity measured at the detector is the Fig. 18.1. Scattering of an incident plane by two nuclei, labeled A and A '. Each nucleus acts as an independent scattering center, emitting an outgoing spherical wave with amplitude given by the scattering length a for that nucleus. The amplitude can vary from one nucleus to another depending on the spin orientation and isotope species, if any. square of the total scattered wave, the sum of individual contributions from the various scattering centers. I~ = N aAψ s (A) ∑ A =1 2 ∑A aA2 ψ s (A) + ∑ A,A ' aAaAψ' s* (A)ψ s (A ') 2 ' (18.17) In (18.17) we have separated the intensity into two contributions, which may be called direct and interference scattering respectively. Since the scattering length can vary with spin orientation and isotope distribution, what is actually measure is an average of (18.17) over these variations, 6 * I ~ ∑ aA aA ψ ' s (A)ψ s (A ') (18.18) A ,A ' where the overhead bar indicated averaging over spin and isotope distributions. Keeping in mind that any quantity averaged no longer necessarily loses its dependence on the nucleus index, we note that since if A = A ' aA aA ' = aA2 = a 2 , 2 = aA aA ' = a , if A ≠ A ' (18.19) we can cover both situations by writing 2 aA aA ' = (a 2 − a )δ AA ' + a 2 2 2 ≡ ainc δ AA ' + acoh (18.20) which defines incoherent process to be direct scattering only, and coherent process to be the sum of direct and interference scattering. Thus, if one does not distinguish among the scattering nuclei, one would have only coherent scattering. It is incoherent scattering that is special in thermal neutron scattering, and this arises because of the scattering length fluctuate with spin orientation or isotope variation. Now that we have introduced the distinction between coherent and incoherent scattering, we should go back to our double differential cross section (18.15) and perform spin and isotope averaging as indicated shown in (18.20). This leads to the identification of coherent and incoherent contributions to the double differential cross section, d 2σ 2 2 = ( E f / Ei )1/ 2 ainc S s (Q,ω ) + acoh S (Q,ω ) d ΩdE f (18.21) where S s (Q,ω ) = 1 2π 1 S (Q,ω ) = 2π ∞ ∫−∞ dte ∞ ∫ dte −∞ iω t iω t 1 iQ⋅R (0) − iQ⋅RA ' ( t ) <e A e > ∑ N A 1 iQ⋅R (0) − iQ⋅RA ' ( t ) <e A e > ∑ N A ,A ' (18.22) (18.23) 7 Notice that in Ss one is concerned only with the motion of the same particle at two different times. For this reason Ss is known as the single particle (or self) dynamic structure factor. While S and Ss may look quite similar, one should be aware that they actually describe quite different properties of the scattering system. From what we have said above, it should come as no surprise that incoherent scattering gives information about motions of particles moving individually, such as in diffusion, while coherent scattering describes collective or cooperative motions among the target nuclei. This distinction will be brought out very clearly when one considers specific models to evaluate (18.22) and (18.23). As an example we show the results of calculating Ss using an ideal gas model. The result is illustrated in Fig. 18.2. Fig. 18.2. Frequency variation of the dynamic structure factor S s (Q, ω ) for a free-gas model. The spectrum is the energy distribution of a thermal neutron scattered at initial energy Ei and momentum transfer, =Q . The meaning of this curve is that it is essentially the energy distribution of the scattered neutrons which have exchanged a momentum of =Q with the scattering nuclei. Notice the peak of the distribution is not at Ef = Ei, as one might expect on the grounds that scattering at no energy exchange should be more likely than scattering with energy gain or loss. The peak is seen to be shifted to a lower energy by an amount ER which is the recoil energy of the scattering nucleus, ER = = 2Q 2 / 2 M . So what we find is that the most likely process is one where the neutron loses an amount of energy to the nucleus that is equal to the recoil energy of the nucleus. The other feature to note in Fig. 18.2 is that the width of the distribution is proportional the square root of the product of the thermal energy (temperature) and the recoil, the higher these two factors the larger is the range in which the scattered neutrons can have their final energies. Both features should give the reader some feeling for how neutrons with initial energy Ei can have their energies spread out after the scattering; in this spreading the neutrons can be upscattered or downscattered with an asymmetric distribution. 8