MECHANICS OF SOFT MATERIALS
advertisement

MECHANICS OF SOFT MATERIALS
K. Y. Volokh
Faculty of Civil and Environmental Engineering
Technion – Israel Institute of Technology
Contents
Mechanics of Soft Materials
1. Tensors
2
2. Kinematics
16
3. Balance laws
28
4. Isotropic elasticity
37
5. Anisotropic elasticity
49
6. Viscoelasticity
56
7. Chemo-mechanical coupling
64
8. Electro-mechanical coupling
71
9. Appendix
79
Volokh 2010
1 Tensors
1.1 Vectors
Vectors are tensors of the first order/rank, by definition, while scalars are zero-order
tensors.
x3
a
b
e3
e2
e1
x2
x1
We consider Cartesian coordinate system with mutually orthogonal axes, xi , and base
vectors
1
0
0
e1 0 , e 2 1 , e 3 0 .
0
0
1
(1.1)
Within this coordinate system we define arbitrary vector a as follows
3
a a1e1 a2e 2 a3e 3 ai e i ,
(1.2)
i 1
where ai are the components of the vector.
Notation in (1.2) is excessive and it is worth simplifying it by using the Einstein rule
3
a e
i 1
i i
ai e i ,
(1.3)
which means that the symbol of the sum can be dropped when the summation is performed
over two repeated indices. Such indices are called dummy because they can be designated by
any character
ai ei a j e j ame m .
Using Einstein’s rule we can write down the scalar or dot product of two vectors a
and b as follows
a b (ai ei ) (b j e j ) ai b j ei e j .
Mechanics of Soft Materials
2
(1.4)
Volokh 2010
The scalar product of base vectors is zero for different base vectors and one for the
same vector
1, i j
ei e j
ij ,
0, i j
(1.5)
where we introduced the (Leopold) Kronecker delta for short notation.
Substituting (1.5) in (1.4) we have
a b ai b j e i e j ai b j ij ai bi a j b j a1b1 a2b2 a3b3 ,
(1.6)
b j ij b1 i1 b2 i 2 b3 i 3 bi .
(1.7)
ij
where
By using the dot product of base vector ei with vector a we find ai
ei a ei (a j e j ) a j ei e j a j ij ai .
(1.8)
The Kronecker delta was introduced through the scalar products of the Cartesian base
vectors. It is also very convenient to introduce the permutation (Tulio Levi-Civita) symbol by
using triple product of base vectors
1, ijk 123; 231; 312
e i (e j e k ) 1, ijk 321; 213; 132 ijk .
0, ijk ...
(1.9)
The permutation symbol allows us to write the components of the vector product in a
short way
ci e i c e i (a b) e i {( a j e j ) (bk e k )} {e i (e j e k )}a j bk ijk a j bk .
(1.10)
ijk
c
It is important that there is no summation over index i in (1.10). Such index is called
free. Computing (1.10) for varying i we get
c1 a2b3 a3b2 , c2 a3b1 a1b3 , c3 a1b2 a2b1 .
(1.11)
1.2 Second-order tensors
To define a second-order tensor we introduce dyadic or tensor product, , of base
vectors
1
1 0 0
e1 e1 e e 0 1 0 0 0 0 0 ,
0
0 0 0
T
1 1
Mechanics of Soft Materials
3
Volokh 2010
1
0 1 0
e1 e 2 e e 0 0 1 0 0 0 0 ,
0
0 0 0
T
1 2
…
0
0 0 0
e 3 e 3 e e 0 0 0 1 0 0 0 ,
1
0 0 1
T
3 3
(1.12)
ei e j e j ei .
By analogy with vectors, we define second-order tensors as a linear combination of
base dyads
A A11e1 e1 A12e1 e 2 A13e1 e3
A21e 2 e1 A22e 2 e 2 A23e 2 e3 .
(1.13)
A31e3 e1 A32e3 e 2 A33e3 e3
By using short notation we can rewrite (1.13) as follows
3
3
A Aij ei e j Aij ei e j .
(1.14)
j 1 i 1
The components of the second-order tensor can be written in the matrix form
A11
A21
A
31
A12
A22
A32
A13
A23 .
A33
In the considered case of Cartesian coordinates, the tensor can be interpreted as a
matrix of its components. In the case of curvilinear coordinates, the situation is subtler and
various matrices of components can represent the same tensor. The latter will be discussed
below.
A second-order tensor (or matrix) maps one vector into another as follows
c Ab ( Aij e i e j )(bm e m ) Aij bm e i (e j e m ) Aij bm jm e i Aij b j e i ,
jm
bj
(1.15)
ci
or
c1 A11
ci Aij b j , c2 A21
c A
3 31
A12
A22
A32
A13 b1
A23 b2 .
A33 b3
Product of two second-order tensors is defined as follows
Mechanics of Soft Materials
4
Volokh 2010
F AD ( Aij e i e j )( Dmne m e n ) Aij Dmn (e j e m )e i e n
jm
,
Aij Dmn jme i e n Aij D jn ei e n
(1.16)
Fin
or
F11
Fin Aij D jn , F21
F
31
F12
F22
F32
F13 A11
F23 A21
F33 A31
A12
A22
A32
A13 D11
A23 D21
A33 D31
D12
D22
D32
D13
D23 .
D33
Double dot product of two tensors is a scalar
A : D ( Aij ei e j ) : ( Dmne m e n ) Aij Dmn (ei e m )(e j e n )
im
jn
Aij im Dmn jn Amj Dmj A11 D11 A12 D12 .... A33 D33
Amj
.
(1.17)
Dmj
By using the double dot product we can calculate components of a second-order
tensor as follows
e i e j : A e i e j : ( Amne m e n ) Amn (e i e m )(e j e n ) Aij .
im
(1.18)
jn
Since the second-order tensor can be interpreted as a matrix then all subsequent
definitions for tensors are analogous to the matrix definitions. For example, the second-order
identity tensor is defined as
1 ij ei e j e1 e1 e 2 e 2 e3 e3 ,
(1.19)
and it enjoys the remarkable property
A1 1A A .
(1.20)
The transposed second-order tensor is
AT ( Aij ei e j )T Aij e j ei Ajiei e j .
(1.21)
It allows us to additively decompose any second-order tensor into symmetric and
skew (anti)-symmetric parts
1
1
A A sym A skew , A sym ( A AT ) ATsym , A skew ( A AT ) ATskew .
2
2
(1.22)
The inverse second order tensor, A 1 , is defined through the identity
A1A AA1 1 .
Mechanics of Soft Materials
5
(1.23)
Volokh 2010
Finally, we consider the eigenproblem for a symmetric second-order tensor A AT .
The eigenvalue (principal value) and the eigenvector (principal direction) n of the tensor
are defined by the following equation
An n .
(1.24)
The eigenproblem defines the principal directions of tensor A where vector n is
mapped into itself scaled by factor . We rewrite the eigenproblem by moving all terms onto
the left hand side
( A 1)n 0 ,
(1.25)
or
A11
A21
A
31
A12
A22
A32
A13
A23
A33
n1 0
n2 0 .
n 0
3
This equation possesses a nontrivial solution when the determinant of the coefficient
matrix is singular
det(A 1) 3 2 I1 ( A) I 2 ( A) I 3 ( A) 0 .
(1.26)
Here the principal invariants of tensor A have been introduced
I1 (A) A11 A22 A33 trA ,
(1.27)
1
I 2 ( A) {( trA) 2 tr( A 2 )} ,
2
(1.28)
I 3 (A) det A .
(1.29)
Since tensor A is symmetric then all roots of (1.26), 1 , 2 , 3 , are real and it is
possible to find three mutually orthogonal principal directions corresponding to the roots. The
unit vectors in principal directions, n (1) , n ( 2) , n ( 3) , obey the orthonormality conditions
n (i ) n ( j ) ij .
(1.30)
Now tensor A can enjoy the spectral decomposition based on the solution of the
eigenproblem
A 1n(1) n(1) 2n( 2) n( 2) 3n(3) n(3) ,
(1.31)
A ( 1 2 )n(1) n(1) 2 1 ,
(1.32)
A 11 .
(1.33)
if 1 2 3 , or
if 1 2 3 , or
Mechanics of Soft Materials
6
Volokh 2010
if 1 2 3 .
Based on the spectral decomposition it is convenient to introduce the logarithm and
the square root of a symmetric positive definite tensor, i 0 ,
3
ln A (ln k )n ( k ) n ( k ) ,
(1.34)
k 1
3
A k n(k ) n(k ) .
(1.35)
k 1
The spectral decomposition also allows us to calculate the principal invariants simply
I1 (A) 1 2 3 ,
(1.36)
I 2 (A) 1 2 1 3 2 3 ,
(1.37)
I 3 ( A ) 1 2 3 .
(1.38)
Finally, we derive the useful Cayley-Hamilton formula pre-multiplying (1.26) with
n (i ) and accounting for A a n (i ) ia n (i )
A 3 A 2 I1 ( A) A I 2 ( A) 1I 3 ( A) 0 .
(1.39)
1.3 Tensor functions
Tensors can be arguments of functions: f (A) ; f ( Aij ) ; f (A) ; f m ( Aij ) ; F(A) ;
Fmn ( Aij ) . Let us calculate a differential of a scalar function f with respect to tensor
argument A
df
f
dAij .
Aij
(1.40)
Here the components of the tensor increment can be written as (see (1.18))
dAij ei e j : dA ,
and, consequently, (1.40) takes form
df
f
f
e i e j : dA
: dA ,
Aij
A
(1.41)
where the derivative with respect to the second-order tensor has been defined
f
f
ei e j .
A Aij
(1.42)
Analogously, it is possible to define the derivative of a second-order tensor
Mechanics of Soft Materials
7
Volokh 2010
C
A
A A
e i e j mn e m e n e i e j .
B Bij
Bij
(1.43)
C mnij
This is the fourth-order tensor, which is formed by a combination of base tetrads
e m e n e i e j that can be interpreted, by analogy with dyads, as tables (matrices) in 4D
space.
The double dot product of the fourth- and second- order tensors is defined as follows
D C : B (Cmnij e m e n ei e j ) : ( Bkle k el )
Cmnij Bkle m e n (ei e k )(e j el ) Cmnij Bij e m e n .
ik
jl
(1.44)
Dmn
As an example let us differentiate a second-order tensor with respect to itself
A Amn
e m e n ei e j mi nj e m e n ei e j .
A Aij
(1.45)
In the case of symmetric tensor A (A AT ) / 2 the symmetry should be preserved
in the derivative
A 1 ( A AT ) 1
( mi nj ni mj )e m e n ei e j .
A 2
A
2
(1.46)
Further important formulas are obtained by differentiating the principal invariants of
A AT
I1 ( A) Akk
ei e j ki kj ei e j 1 ,
A
Aij
(1.47)
I 2 ( A) 1 ( Akk All Amn Anm )
ei e j I1 ( A)1 A .
A
2
Aij
(1.48)
ij
The derivative of the third invariant I 3 (A) det A is less trivial and we start with
calculating the increment of it with the help of (1.26)
1
det(A dA) det A det(A
A (
1) 1)
d
tensor
.
eigenvalue
1
1
(1.49)
1
det A{1 I1 ( A dA) I 2 ( A dA) I 3 ( A dA)}
Ignoring higher-order terms in (1.49) we have
det( A dA) det A det A I1 ( A 1dA) det A (det A) A T : dA ,
(1.50)
A T :dA
and, consequently,
Mechanics of Soft Materials
8
Volokh 2010
I 3 ( A) (det A)
(det A) A T .
A
A
(1.51)
1.4 Tensor analysis
We turn to tensor analysis and define the following differential operators for vectors
and second-order tensors in Cartesian coordinates
grad
grad a
div a
curl a e i
ei ,
x xi
(1.52)
a
a a
ei j e j ei ,
x xi
xi
(1.53)
a
a
a
ei j e j ei i ,
xi
xi
xi
(1.54)
a j
a j
a
ei e j
kij e k
xi
xi
xi
a a
a a
a
a
e1 3 2 e 2 1 3 e 3 2 1
x1 x2
x2 x3
x3 x1
div A
,
(1.55)
A
A
A
e i mn (e m e n )e i mn e m
xi
xi
xn
A
A
A
11 12 13 e1
x2
x3
x1
A
A
A
21 22 23 e 2
x2
x3
x1
.
(1.56)
A
A
A
31 32 33 e 3
x2
x3
x1
Now we refresh our memories concerning the divergence theorem (Gauss, Green, and
Ostrogradskii) which is an important tool for transforming volume and area integrals. Its
simplest version in one-dimensional case is the famous Newton-Leibnitz rule
n(a )
n(b)
a
b
x
b
dy
dx dx (1) y(b) (1) y(a) n(b) y(b) n(a) y(a) .
a
In a three-dimensional case we can write
Mechanics of Soft Materials
9
Volokh 2010
n
V
A
y
x
i
dV ni ydA .
(1.57)
The powerful generalization of this formula is
Bij
x
j
dV
Bi1
B
B
dV i 2 dV i 3 dV
x1
x2
x3
Bi1n1dA Bi 2 n2 dA Bi 3n3dA ,
(1.58)
Bij n j dA
or, shortly,
divB dV BndA .
(1.59)
Of course, the second-order tensor B can be replaced by scalar b or vector b
gradb dV bndA ,
(1.60)
divb dV b ndA .
(1.61)
Another useful formula is due to Stokes who related the contour integral over curve l
to surface A built on it
n
A
l
b dx (curl b) ndA ,
(1.62)
where dx is the infinitesimal element of the curve l .
1.5 Curvilinear coordinates
Some problems are easier to solve in curvilinear rather than Cartesian coordinates.
We consider curvilinear coordinates ( 1 , 2 , 3 ) which can be defined through the Cartesian
Mechanics of Soft Materials
10
Volokh 2010
coordinates ( x1 , x2 , x3 ) and vice versa. For example, in the case of cylindrical coordinates we
have
gz
x3
g
e3
e1
gr
e2
x2
z
r
x1
1 r; 2 ; 3 z ,
(1.63)
x1 r cos ; x2 r sin ; x3 z ,
(1.64)
r x12 x22 ; arctan
x2
;
x1
z x3 .
(1.65)
We define the natural (co-variant) base vectors in curvilinear coordinates
si
x j
i
ej,
(1.66)
which take the following form in cylindrical coordinates
x3
x1
x2
s r r e1 r e 2 r e 3 cos e1 sin e 2
x
x1
x
e1 2 e 2 3 e 3 r sin e1 r cos e 2 .
s
x
x1
x
e1 2 e 2 3 e 3 e 3
s z
z
z
z
(1.67)
We also define the dual (contra-variant) base vectors
si
i
ej ,
x j
(1.68)
which take the following form in cylindrical coordinates
r r
r
r
e1
e2
e 3 cos e1 sin e 2
s
x
x
x
1
2
3
sin
cos
e1
e2
e3
e1
e2 .
s
x
x
x
r
r
1
2
3
z z
z
z
e1
e2
e3 e3
s
x1
x2
x3
Mechanics of Soft Materials
11
(1.69)
Volokh 2010
The natural and dual base vectors are mutually orthogonal
j
x j
x j j 1, i j
x
.
si s j mi em
en mi
mn mi
xm i 0, i j
xn xn
(1.70)
Now vectors and tensors may have various representations in curvilinear coordinates
a a i si aisi ,
(1.71)
A Aij si s j Aij si s j A.ij si s j Ai. j si s j ,
(1.72)
where a i a si are contra-variant components; and ai a s i are co-variant components;
Aij A : (s i s j )
are contra-variant components;
Aij A : (s i s j )
are co-variant
components; and Ai. j A : (s i s j ) and A.ij A : (s i s j ) are mixed components.
In the case where the base vectors are mutually orthogonal it is possible to normalize
them. For example, in the case of the cylindrical coordinates we have
cos
sin
0
s
sr
sr
s
sz
sz
gr
r sin , g
cos , g z
z 0 .
sr
s
s
s
s
s
z
0
0
1
(1.73)
The normalized base vectors allow introducing the so-called physical components of
vectors and tensors with the same units
a ar g r a g a z g z ,
(1.74)
A Arr g r g r Ar g r g Arz g r g z
Ar g g r A g g Az g g z .
(1.75)
Azr g z g r Az g z g Azz g z g z
Now we calculate differential operators in curvilinear coordinates
grad a
a
a
j
a
ei
ei
sj ,
j
j
xi
xi
(1.76)
sj
curl a e i
a j
a
a
ei
sj
,
j
xi
xi
j
(1.77)
sj
divB
B
B j
B j
ei
ei
s .
j
xi
xi
j
(1.78)
sj
In the case of cylindrical coordinates we have, for example,
Mechanics of Soft Materials
12
Volokh 2010
(...)
(...)
(...)
sr
s
sz
r
z
.
(...)
1 (...)
(...)
gr
g
gz
r
r
z
grad(...)
(1.79)
In calculating the derivatives of vectors and tensors one should not forget that the
natural and dual and physical base vectors depend on coordinates! In the considered case of
cylindrical coordinates we have the following derivatives of the physical base vectors
g
g r
g z
0;
0;
0
r
r
r
g
g r
g z
g ;
g r ;
0.
g
g r
g z
0;
0;
0
z
z
z
(1.80)
Besides the considered cylindrical coordinates it is useful to list the basic relationships
for spherical coordinates
g g
x3
gr
e3
e1
r
x2
e2
x1
1 r; 2 ; 3 ,
(1.81)
x1 r cos sin ; x2 r sin sin ; x3 r cos ,
(1.82)
r x12 x22 x32 ; arccos
x3
x12 x22 x32
; arctan
x2
,
x1
(1.83)
cos sin
cos cos
sin
g r sin sin , g cos sin , g cos ,
cos
sin
0
(1.84)
(...)
1 (...)
1 (...)
gr
g
g ,
r
r
r sin
(1.85)
grad(...)
Mechanics of Soft Materials
13
Volokh 2010
g
g
g r
0;
0;
0
r
r
r
g
g
g r
.
g ;
g r ;
0
g
g
g r
g sin ;
g cos ;
g r sin g cos
(1.86)
1.6 Homework
1. Prove:
sm sn sp
det km kn kp ,
tm tn tp
skt mnp
(1.87)
skt snp kn tp kp tn ,
(1.88)
skt skp 2 tp ,
(1.89)
skt skt 2 tt 6 .
(1.90)
2. Prove (1.20).
3. Prove for second-order tensors A, B:
1
det A ijk stp Asi Atj Apk ,
6
(1.91)
1
,
det A
(1.92)
(AB) 1 B1A1 ,
(1.93)
(AT )1 (A1 )T AT .
(1.94)
det A 1
4. Prove (1.37).
5. Prove (1.48).
6. Prove for second-order tensors A, B:
tr(A 1B) A T : B .
(1.95)
curl grad 0 .
(1.96)
div curl a 0 .
(1.97)
7. Prove for scalar :
8. Prove for vector a :
9. Prove (1.84).
10. Prove (1.85).
Mechanics of Soft Materials
14
Volokh 2010
11. Prove (1.86).
Mechanics of Soft Materials
15
Volokh 2010
2 Kinematics
2.1 Deformation gradient
0
dx
u
x3
dy
x
y
e3
e1
e2
x2
x1
We consider deformation of a body shown in its reference and current states. The law
of motion of material points, i.e. infinitesimal material volumes, is defined by
y y (x, t ) ,
(2.1)
where x and y are the reference and current positions of the point. It is usually convenient,
yet not necessary, to assume that the reference state is the initial one: x y (x, t 0) .
If we consider x as an independent variable then we follow motion of a material
point that was fixed at x in the reference configuration. Such description is called referential
or material or Lagrangean. If, alternatively, we consider y as an independent variable then
we follow motion of various material points passing through y in the current configuration.
The latter description is called spatial or Eulerian. The Eulerian description is preferable
when the evolution of continuum boundaries is known beforehand like in many problems of
fluid mechanics while the Lagrangean description is preferable when the evolution of
continuum boundaries is not known beforehand like in many problems of solid mechanics.
An infinitesimal material fiber at points x and y before and after deformation
accordingly can be described by the linear mapping (transformation)
d y Fd x ,
(2.2)
where
Mechanics of Soft Materials
16
Volokh 2010
y yi
ei e j
x x j
F
(2.3)
is the tensor of deformation gradient. This tensor is related to two configurations
simultaneously and because of that it is called two-point.
Alternatively, we can use the displacement vector, u y x , to get
F
(x u)
1 H ,
x
(2.4)
H
u ui
ei e j
x x j
(2.5)
where
is the displacement gradient tensor.
It is possible to calculate any deformation when the deformation gradient is known.
We start with the volume deformation
dx (3)
dV0
dV
F
dx ( 2)
dy (3)
dy ( 2)
dy (1)
dx (1)
dyi( m ) Fij dx (jm ) ,
dy1(1)
dV dy1( 2 )
dy1(3)
dy2(1)
dy2( 2)
dy2(3)
dy3(1)
F1 j dx(j1)
dy3( 2 ) F1 j dx(j2)
dy3(3) F1 j dx(j3)
(2.6)
F2 j dx(j1)
F2 j dx(j2)
F2 j dx(j3)
F3 j dx(j1)
F3 j dx(j2)
F3 j dx(j3)
dx1(1) dx2(1) dx3(1) F11 F21 F31
dx1( 2 ) dx2( 2 ) dx3( 2) F12 F22 F32 JdV0
dx1(3) dx2(3) dx3(3) F13 F23 F33
,
(2.7)
det F
dV0
where
J det F 0 .
(2.8)
In the case of the area deformation we have
Mechanics of Soft Materials
17
Volokh 2010
dx
dy
n
n0
dV0
dV
dA
dA0
dV0 n0 dA0 dx ,
(2.9)
dV ndA dy ndA Fdx .
(2.10)
ndA Fdx Jn0 dA0 dx ,
(2.11)
(FT ndA Jn 0 dA0 ) dx 0 .
(2.12)
Using (2.7) we derive
Since dx is arbitrary we can write the Nanson formula
ndA JF T n0 dA0 .
(2.13)
Now we define the fiber stretch in direction m; m 1
m
dy
dx
(m)
dy F dx
Fm .
dx
dx
(2.14)
We can also define the change of angle between two fibers by using stretches as
follows, for example,
Mechanics of Soft Materials
18
Volokh 2010
dy 2
dx 2
0
dy 1
dx1
cos
dy1 dy 2
Fm1 Fm2
,
dy1 dy 2 (m1 ) (m 2 )
(2.15)
dx1 dx 2
m1 m 2 ,
dx1 dx 2
(2.16)
cos 0
1
F T F 1 m 2 .
(m1 ) (m 2 )
(m1 , m 2 ) cos cos 0 m1
(2.17)
To illustrate the above formulas we consider the Simple Shear deformation
x2
x1
x3
tan( / 2 ) cot ,
y1 x1 x2
,
y2 x2
y x
3
3
F
yi
ei e j e1 e1 e 2 e2 e3 e3 e1 e2 1 e1 e 2 ,
x j
(e1 ) (Fe1 ) Fe1 e1 e1 1 ,
(e2 ) (Fe2 ) Fe2 (e2 e1 ) (e2 e1 ) 1 2 ,
cos
Mechanics of Soft Materials
(Fe1 ) (Fe2 ) e1 (e 2 e1 )
,
Fe1 Fe2
1 2
1 2
19
Volokh 2010
0 / 2 arccos
1 2
2
arccos
cos / sin
1 (cos / sin ) 2
2.
arccos(cos ) / 2 / 2
2.2 Polar decomposition of deformation gradient
Let us square the expression for stretch (2.14) and rewrite it as follows
2 (m) (Fm) (Fm) m FT Fm m Cm ,
(2.18)
C FT F
(2.19)
where
is the right Cauchy-Green tensor.
In the case where direction m is the principal direction of tensor C we have
2 (m(i ) ) m(i ) Cm(i ) m(i ) im(i ) i ,
(2.20)
where i and m (i ) are the eigenvalues and eigenvectors of C.
The above equation means that eigenvalues of the right Cauchy-Green tensor are
equal to the squared stretches in principal directions. Thus we can write the following
spectral decomposition of C in the form
C 12m(1) m(1) 22m( 2) m( 2) 32m(3) m(3) .
(2.21)
Now we define the right stretch tensor as the square root of the right Cauchy-Green
tensor
U C 1m(1) m(1) 2m( 2) m( 2) 3m (3) m (3) ,
(2.22)
where all principal stretches are nonnegative.
We assume now that any deformation can be multiplicatively decomposed into stretch
and some additional deformation which we designate R
F RU ,
(2.23)
which is called the polar decomposition of the deformation gradient and, consequently,
R FU1 .
(2.24)
Let us analyze properties of R. First, we observe that it is orthogonal
T
R T R (FU 1 )T (FU 1 ) U T F
F U 1 U T U 2 U 1 U T UT UU 1 1 .
U
(2.25)
2
Orthogonal tensors do not change lengths
dy dy dy (Rdx) (Rdx) dx R T Rdx dx dx dx .
Mechanics of Soft Materials
20
(2.26)
Volokh 2010
Besides, we observe
det(FT F)
det F
det FT det F
det C
det U 2 det U
det R
1 . (2.27)
det U
det U
det U
det U
det U
det U
Equations (2.25) and (2.27) mean that R is the proper orthogonal or rotation tensor.
Finally we notice that the meaning of the polar decomposition, F RU , is the
successive stretch and rotation.
Rdx
R
V
F RU VR
dx
dy RUdx
VRdx
F dx
Udx
R
U
It is possible, of course, to change the order of stretch and rotation
F VR ,
(2.28)
V FR1 FRT RURT VT ,
(2.29)
where V is called the left stretch tensor.
By direct computation we have
which means that the left stretch tensor is the rotated right stretch tensor, and consequently
they have the same eigenvalues – principal stretches, while their principal directions are
different.
With account of the spectral decomposition of U we have
V 1n(1) n(1) 2n( 2) n( 2) 3n(3) n(3) ,
(2.30)
n(i ) n(i ) Rm(i ) Rm(i ) .
(2.31)
where
To clarify the meaning of the principal directions of V we square the tensor as follows
V 2 RURT RURT (RU)(RU)T FFT B ,
Mechanics of Soft Materials
21
(2.32)
Volokh 2010
B 12n (1) n (1) 22n ( 2) n ( 2) 32n (3) n (3) ,
(2.33)
where B is the left Cauchy-Green tensor, which principal directions coincide with the
principal directions of V while the principal values of B are squared principal stretches.
Unfortunately, we cannot directly write the relations between the directions of the
principal stretches in the reference and current configurations because these directions are not
defined uniquely and can always be changed to the opposite sign! However, we can define
the principal directions uniquely by the following procedure. Assume, for example, that the
principal directions in the reference configuration, m(i ) , are uniquely chosen then we
calculate the principal directions in the current configuration as follows
n(i ) Rm(i ) .
(2.34)
Of course, we could start with the current configuration otherwise.
Finally, we can calculate the spectral decomposition of the deformation gradient
F RU 1Rm(1) m(1) 2 Rm( 2) m( 2) 3Rm(3) m(3)
1n(1) m(1) 2n( 2) m ( 2) 3n(3) m(3)
.
(2.35)
Let us consider the following deformation (Marsden and Hughes, 1983) as a
numerical example
y1 3 x1 x2
.
y2 2 x2
y x
3
3
In this case we have
3 1 0
F 0 2 0 ,
0
0
1
1 6 , m
(1)
1
1
3 ,
2
0
3
C 3
0
2 2 , m
3 3 3 3
0
1
3 3 1 3 3
U
0 ,
2 2
0
2 2
0
U 1
1 3
3 1 0
1
1 3 1 3
R
0 ,
2 2
0
2 2
0
Mechanics of Soft Materials
( 2)
22
3 0
5 0 ,
0 1
3
1
1 ,
2
0
3 1, m
( 3)
0
0 ,
1
1 3 3
3 3
0
1
3 3 3 3
0 ,
4 6
0
4 6
0
1 3
3 1
1
3 1 1 3
V
2
0
0
0
0 .
2
Volokh 2010
2.3 Strains
The strain measures can be introduced in various ways. We start with 1D measures
for the change of the length of a material fiber.
L
L0
We can introduce the engineering strain
L L0
1,
L0
(2.36)
L
dL
L
ln
ln ,
L
L0
L0
(2.37)
G
L2 L20 1 2
( 1) .
2 L20
2
(2.38)
E
or the logarithmic strain
L
or the Green strain
In order to generalize 1D to 3D strains we assume that formulas (2.36)-(2.38) are
valid in the principal directions of the reference configuration. In this case, the 3D strain
tensors take forms
3
ε E (i 1)m ( i ) m ( i ) U 1 ,
(2.39)
i 1
3
ε L (ln i )m ( i ) m (i ) ln U ,
(2.40)
3
1
1
ε G (i2 1)m (i ) m ( i ) (U 2 1) .
2
i 1 2
(2.41)
i 1
The Green strain tensor is the most popular and it can be rewritten by dropping the
suffix
ε
1 2
1
1
1
(U 1) (C 1) (FT F 1) (H HT HT H) .
2
2
2
2
(2.42)
2.4 Motion
Velocity and acceleration are defined as material time derivatives accordingly
Mechanics of Soft Materials
23
Volokh 2010
v
d
y (x, t ) y x u u ,
dt
(2.43)
dv
v .
dt
(2.44)
a
When the Eulerian or spatial description is used it is necessary to use the chain rule
for differentiation of any function, f (y(t ), t ) :
df
f f y f f
f (y (t ), t )
v,
dt
t y t t y
a
(2.45)
dv
v v
v
v.
dt
t y
(2.46)
Another important kinematic quantity is the velocity gradient, L ,
d y y v v y
F
LF ,
dt x x x y x
L
(2.47)
v 1
FF .
y
(2.48)
It can be decomposed into symmetric and skew symmetric parts
L d ω, d
1
1
(L LT ), ω (L LT ) ,
2
2
(2.49)
where d and ω are the deformation rate and the spin (vorticity) tensors accordingly.
2.5* Deformation gradient in curvilinear coordinates
We consider the deformation gradient in curvilinear coordinates. To be specific we
choose the deformation law in cylindrical coordinates before {R, , Z } and after {r , , z}
deformation:
r r ( R, , Z ); ( R, , Z ); z z ( R, , Z ) .
(2.50)
To treat this deformation we introduce the natural curvilinear base vectors for the
reference and current configurations accordingly
Mechanics of Soft Materials
cos
sin
0
G R sin ; G cos ; G Z 0 ,
0
0
1
(2.51)
cos
sin
0
g r sin ; g cos ; g z 0 .
0
0
1
(2.52)
24
Volokh 2010
Now the deformation gradient can be written as follows
F
y
1 y
y
GR
G
GZ ,
R
R
Z
(2.53)
where
y y1e1 y2e 2 y3e 3
rcos
(cos g r sin g ) rsin
(sin g r cos g ) z
g .
y3 z
y1
y2
e1
e2
(2.54)
e3
r g r zg z
We have with account of g z constant
(r g r z g z )
(r g r z g z )
(r g r z g z )
GR
G
GZ
R
R
Z
gr
r
z
gr G R r
GR
gz GR
R
R
R
,
r g r
r
z
g r G
G
g z G
R
R
R
r g r
r
z
gr G Z
GZ
gz GZ
Z
Z
Z
F
(2.55)
where
g r g r r g r g r z
R r R R z R R g
g r g r r g r g r z
g .
r
z
g r g r r g r g r z
g
r Z Z z Z Z
Z
(2.56)
Finally, we have
r
r
r
gr G R
g r G
gr GZ
R
R
Z
r
r
r
g G R
g G
g G Z .
R
R
Z
z
z
z
gz GR
g z G
gz GZ
R
R
Z
F
(2.57)
2.6 Homework
1. Find principal directions and stretches for the following deformation law
Mechanics of Soft Materials
25
Volokh 2010
y1 (1 ) x1 x2
y2 x1 (1 ) x2 ,
y x
3
3
(2.58)
where constant .
2. Make the polar decomposition of the deformation gradient for the deformation law
presented in (2.68).
3. Calculate the Cartesian components of the Green strain for the deformation law presented
in (2.68).
4. Read Section 2.5.
Mechanics of Soft Materials
26
Volokh 2010
3 Balance laws
3.1 Material time derivatives of integrals
We start with the computation of the material time derivative of a volume integral.
For the field quantity (y (t ), t ) over a “moving” region, V (t ) , whose configuration depends
on time t , we have the following formula (regarding the integral as an infinite sum)
d
d
dV (t ) ( dy1 (t )dy2 (t )dy3 (t ))
dt
dt
d
(
dy1dy2 dy3 dv1dy2 dy3 dy1dv2 dy3 dy1dy2 dv3 )
dt
d
v
v
v
(
1 2 3 )dV
,
dt
y1
y2
y3
(3.1)
d
div v)dV
dt
(
div( v ))dV
t
(
where the last equality is obtained as follows
d
yi
v
v ( vi )
div v
i
vi i
.
dt
t
yi t
yi
t
yi
yi
t
yi
3.2 Mass conservation
The law of mass conservation can be written as follows
m dV constant ,
(3.2)
where is mass density.
Differentiating (3.2) with respect to time we have
dm d
d
dV ( div v)dV ( div( v))dV 0 .
dt dt
dt
t
(3.3)
Since the equality is obeyed for any volume we can localize the condition for the
infinitesimal volume
d
div v
div( v) 0 .
dt
t
(3.4)
3.3 Balance of linear momentum
Mechanics of Soft Materials
27
Volokh 2010
We start with the balance of linear momentum for a volumeless particle – Newton's
law –
d
(m v) p ,
dt
(3.5)
where m v is the linear momentum and p is the force resultant.
By analogy with Newton’s law Euler considered the balance of the linear momentum
for a continuum volume V bounded by surface A
d
vdV b dV tdA ,
dt
(3.6)
where b is the body force per unit mass and t is the surface force or traction per unit area.
Let us localize the Euler law. First, differentiating the left-hand side of (3.6) we get
d
d ( v )
vdV (
v div v)dV .
dt
dt
(3.7)
Then we rewrite the Euler law in the form
fdV t dA ,
(3.8)
where
f b
d ( v )
v div v
dt
(3.9)
is the generalized body force.
Now it is necessary to transform the area integral into a volume integral. This is
possible due to the Cauchy assumption
n
t
A
Mechanics of Soft Materials
28
Volokh 2010
t
t ( y , n) .
A 0 A
t lim
(3.10)
The first corollary of the Cauchy assumption is the Newton law of action and
counteraction.
A1
n
V1
A*
n
V2
A2
For every part of the body we have
f dV t dA t(n)dA * .
f dV t dA t(n)dA *
1
1
2
2
(3.11)
Summing the equalities we get
f dV t dA [t(n) t(n)] dA * .
(3.12)
Substitution of (3.8) in (3.12) yields
[t(n) t(n)] dA * 0 .
(3.13)
This equality is correct for any surface; consequently, we can localize it and get the
third Newton law
t (n) t (n) .
(3.14)
The second corollary of the Cauchy assumption is the appearance of the stress tensor.
y3
C
t (n)
n
e3 h
e2
e1 O
D
y1
Mechanics of Soft Materials
29
B
y2
Volokh 2010
We define a tetrahedron of height h in direction n at point y . The direction cosines
ni allow us to calculate the following areas of the tetrahedron
CDB A, COB An1 , COD An2 , DOB An3 .
(3.15)
Now, we apply the linear momentum balance to the tetrahedron:
f dV t(n) dA t(e )dA t(e
1
CDB
COB
2
)dA
COD
t(e )dA .
3
(3.16)
DOB
According to the mean value theorem and with account of (3.15) we have
f
hA
t (n) A t (e1 ) An1 t (e 2 ) An2 t (e 3 ) An3 ,
6
(3.17)
where the barred quantities are calculated inside the proper volume or area.
Simplifying (3.17) and setting h 0 we obtain
0 t(n) t(e1 )n1 t(e 2 )n2 t(e3 )n3 ,
(3.18)
ni ei n .
(3.19)
where
Substituting (3.19) in (3.18) and accounting for (3.14) we get
t (n) t (e1 )(e1 n) t (e 2 )(e 2 n) t (e 3 )(e 3 n)
(t (e1 ) e1 t (e 2 ) e 2 t (e 3 ) e 3 )n ,
(3.20)
σ
σn
where we introduced the Cauchy stress tensor
σ t(e1 ) e1 t(e2 ) e2 t(e3 ) e3 .
(3.21)
To find its components we have to pre-multiply it with the base dyads
ij ei e j : σ .
For example, we have
22 e2 e2 : σ e2 t (e2 ) ,
12 e1 e2 : σ e1 t (e2 ) ,
32 e3 e2 : σ e3 t(e2 ) ,
which means that the components of the Cauchy stress tensor are projections of the stress
vector onto the axes of Cartesian coordinates.
Mechanics of Soft Materials
30
Volokh 2010
32
y3
t (e 2 )
t (e 2 )
e2
22
y2
12
y1
33
23
13
32
31
11
22
21
12
We return to the linear momentum balance (3.8) which can be rewritten using the
stress tensor
f dV σn dA .
(3.22)
Now the divergence theorem allows us to transform the surface integral into the
volume integral
σndA divσdV .
(3.23)
Then the linear momentum balance takes the form
(f divσ)dV 0 .
(3.24)
Localizing it and substituting from (3.9) we have finally
d ( v )
v div v divσ b
dt
.
v j ij
d (vi )
vi
bi
dt
y j y j
(3.25)
By way of example let us find traction t (n) , normal stress vector t n (n) , and tangent
stress vector t t (n) for the given stress tensor
σ 7e1 e1 2(e1 e3 e3 e1 ) 5e 2 e 2 4e3 e3
and area with normal
Mechanics of Soft Materials
31
Volokh 2010
2
2
1
n e1 e2 e3 .
3
3
3
By direct calculation we have
t σn 7e1 (e1 n) 2e1 (e3 n) 5e 2 (e 2 n) 2e3 (e1 n) 4e3 (e3 n) 4e1
t n (t n)n (4e1 n
10
e2 ,
3
10
44
88
88
44
e 2 n)n
n
e1 e 2 e3 ,
3
9
27
27
27
tt t tn
1
(20e1 2e 2 44e3 ) .
27
3.4 Balance of angular momentum
r
y3
C
y
y2
O
y1
In the case of a mass-point we have the angular momentum balance
d (m v)
rp,
dt
(3.26)
d (m r v)
r p .
dt
(3.27)
r
or
The latter is true because:
d
dr
dv
dv
dv
.
(mr v) m v m r
m v v mr
mr
dt
dt
dt
dt
dt
In the case of continuum we have instead of (3.27)
d
r vdV r b dV r t dA .
dt
(3.28)
It is convenient to manipulate this equation in Cartesian coordinates. In this case we
can rewrite the angular momentum balance as follows
d
rj vk dV rj bk dV rj tk dA 0 .
dt
ijk
Mechanics of Soft Materials
32
(3.29)
Volokh 2010
The first and the third terms in the equation above can be calculated by using the
material time derivative of the volume integral and the divergence theorem accordingly
d ( r j vk )
v
d
rj vk dV
rj vk m dV
dt
dt
ym
,
d ( vk )
vm
dV
rj
vk v j r j vk
dt
ym
r t
j k
(3.30)
dA r j kl nl dA
(r j kl )
yl
dV
kl ,
dV
jl kl rj
yl
kl
dV
kj r j
yl
(3.31)
where we used relation ri yi (OC )i with OC fixed.
Substituting (3.30)-(3.31) in (3.29) we get
d ( vk )
v
vk m bk kl vk v j kj ]dV 0 ,
ym
yl
dt
ijk [rj
(3.32)
0
where the term in the parentheses is the law of the linear momentum balance and it is equal to
zero.
Thus we have
ijk
( vk v j kj )dV ijk kj dV 0 .
(3.33)
The latter equation can be obeyed for the symmetric Cauchy tensor only
kj jk , σ σ T .
(3.34)
3.5 Master balance principle
All balance laws enjoy the same structure
d
α dV ξ dV φn dA ,
dt
(3.35)
where ξ is the volumetric supply of α and φ is the surface flux of α .
Differentiating the integral and using the divergence theorem we localize the balance
law
Mechanics of Soft Materials
33
Volokh 2010
dα
αdiv v divφ ξ .
dt
(3.36)
The considered balance laws are summarized in the table:
α
ξ
φ
Mass
0
0
Linear Momentum
v
b
σ
Angular Momentum
r v
r b
rσ
3.6 Lagrangean description
The description of balance laws was spatial or Eulerian because y was chosen as an
independent variable. In the case of solids (contrary to fluids) it is usually more convenient to
consider x as an independent variable, i.e. it is better to use the referential or Lagrangean
description. The transition from one description to another is simple when the formulas
relating volumes and surfaces before and after deformation are used (see (2.7) and (2.13))
dV dV0 det F JdV0 ,
(3.37)
ndA JF T n0 dA0 .
(3.38)
Substituting these equations in the master balance law we get
d
α 0 dV0 ξ 0 dV0 φ 0 n 0 dA0 ,
dt
(3.39)
where we defined the Lagrangean quantities
α 0 (x, t ) J α(y(x, t ), t ) ,
(3.40)
ξ 0 (x, t ) J ξ(y(x, t ), t ) ,
(3.41)
φ0 (x, t ) J φ(y (x, t ), t )F T .
(3.42)
We differentiate (3.39) with respect to time through the integral directly because the
volume does not change and we get the localized balance law in the Lagrangean form
α 0
Divφ 0 ξ 0 .
t
(3.43)
Here ‘Div’ operator is with respect to the referential coordinates
Div(...)
Mechanics of Soft Materials
34
(...)
ei .
xi
Volokh 2010
Particularly, the Lagrangean form of the previous table is
α0
ξ0
φ0
Mass
0
0
0
Linear Momentum
0 v
0b
T
Angular Momentum
r 0 v
r 0b
rT
where
T(x, t ) J σ(y(x, t ), t )F T
(3.44)
is the 1st Piola-Kirchhoff stress tensor (1PK).
The laws of mass, linear and angular momentum balance take the following forms
accordingly
0
0,
t
(3.45)
( 0 v)
DivT 0b
t
,
( 0 vi ) Tij
0bi
t
x j
(3.46)
TF T FTT ,
(3.47)
Since the 1st Piola-Kirchhoff stress tensor is not symmetric it is convenient to
introduce the 2nd Piola-Kirchhoff stress tensor (2PK)
S F 1T JF 1σF T .
Mechanics of Soft Materials
35
(3.48)
Volokh 2010
4 Isotropic elasticity
4.1 Hyperelasticity
E
The rheological model for elastic material is a spring. For the classical linear spring,
stress is equal to strain scaled by Young modulus, E ,
E .
(4.1)
This equation is called Hooke’s law in honor of Robert Hooke.
Evidently, this constitutive law is a linearization of a more general function describing
a nonlinear spring
( ) .
(4.2)
Although this function can be fitted in experiments only it is possible to draw some
conclusions about it considering the work of stress on strain
w ( )d .
(4.3)
In the case of an ideal elastic spring, this work does not depend on the loading history
and it only depends on the initial and final states of the spring – the integration limits in (4.3).
If the integral is path-independent then the integrand should be a full differential
dw ( )d .
(4.4)
It follows from (4.4) that stress in an ideal elastic spring should be a derivative of the
strain energy with respect to strain
dw
,
d
(4.5)
where in the case of Hookean elasticity we have: w E 2 / 2 .
The extension of the simplistic formula (4.5) to 3D is not trivial. Indeed, variety of
stresses and strains can be considered and it is not clear which stress works on which strain.
To clarify that we consider the work of external forces on displacement increments, du dy ,
over the whole 3D body
d dy t 0 dA0 dy 0bdV0 ,
Mechanics of Soft Materials
36
(4.6)
Volokh 2010
where t 0 and 0b designate prescribed tractions per the reference area and body forces per
the reference volume, including the inertia forces.
By using the equilibrium equation (3.46) we can rewrite (4.6) in the form
d t 0 dy dA0 (DivT) dy dV0 ,
(4.7)
where T is the 1st Piola-Kirchhoff stress.
We transform (4.7) as follows
d t0i dyi dA0
t0i dyi dA0
Tij
x j
dyi dV0
(Tij dyi )
x j
dV0 Tij
(dyi )
dV0
x j
y
(t0i Tij n0 j )dyi dA0 Tij d i dV0
x j
,
(4.8)
0 (boundary conditions )
Tij dFij dV0
T : dF dV0
where the boundary conditions on tractions have been used
Tn 0 t 0 .
(4.9)
Transformation (4.8) means that the incremental work of the external forces is equal
to the incremental work of the internal forces. The work of the internal forces per unit
volume can be designated as follows
dW T : dF .
(4.10)
Analogously to 1D case this work is path independent only in the case where
T
W (F)
W (F)
, Tij
.
F
Fij
(4.11)
Here W is called the strain energy and material obeying (4.11) is called hyperelastic.
Evidently, the 1st Piola-Kirchhoff stress makes a work-conjugate couple with the
deformation gradient. It is possible, however, to assume that the strain energy depends on the
Green strain, ε (F T F 1) / 2 , rather than on the deformation gradient. In this case we have
(prove it!)
Tij
W (ε(F)) mn W 1 ( Fkm Fkn mn ) W
Fim ,
mn
Fij
mn 2
Fij
mj
or
Mechanics of Soft Materials
37
Volokh 2010
TF
W
.
ε
(4.12)
On the other hand we have by definition, (3.48),
T FS ,
(4.13)
where S is the 2nd Piola-Kirchhoff stress tensor and, consequently,
S
W (ε)
W (ε)
,
, Sij
ε
ij
(4.14)
W (C)
W (C)
,
, Sij 2
C
Cij
(4.15)
or
S2
where C FT F 2ε 1 is the right Cauchy-Green tensor.
It is possible to show that the considered stress-strain pairs are work-conjugate by the
direct computation (prove it!)
T : dF S : dε .
(4.16)
The ‘true’ Cauchy stress is obtained from (4.14)-(4.15) with the help of (3.48) with
J det F
σ J 1F
W T
W T
F 2 J 1F
F .
ε
C
(4.17)
We showed that the strain energy could be defined as a function of various strains. Is
there any preference in the choice of strains? The answer is yes. The strains which are
insensitive to the Rigid Body Motion (RBM) are preferable.
t
Q (RBM)
t*
t 0
F
s
y2
y1
x2
y1
y
s*
2
x1
O
Indeed, let us consider RBM superposed on the current configuration of material
y* Q(t )y h(t ) ,
(4.18)
where QT Q1 (det Q 1) is the proper orthogonal tensor of rotation and h is a vector of
translation.
Mechanics of Soft Materials
38
Volokh 2010
This motion preserves the length and the angle. Indeed, we have
s* y 2 * y1* Q(y 2 y1 ) Qs ,
(4.19)
s * s * s * s QT Qs s 1s s s s ,
(4.20)
cos *
s * p * s QT Qp s p
cos .
s* p*
sp
sp
(4.21)
Thus, a material fiber deforms as follows
dy* Qdy QF
dx F * dx .
(4.22)
F*
It is natural to require that the magnitude of the strain energy is not affected by RBM
because there is no straining. The latter means that the function of the strain energy should
obey the following condition
W (F) W (QF) .
(4.23)
The right Cauchy-Green and Green strain tensor obey this condition automatically
because they are insensitive to RBM
T
C* F *T F* (QF)T (QF) FT Q
QF F T F C ,
(4.24)
1
ε* (C * 1) / 2 (C 1) / 2 ε .
(4.25)
4.2 Rivlin’s representation for isotropic material
Ronald Rivlin found (1948) the following representation for the strain energy of
isotropic materials, which is given without proof,
W (C) W ( I1 , I 2 , I 3 ) ,
(4.26)
I1 trC, I 2 {( trC) 2 tr (C2 )} / 2, I 3 detC ,
(4.27)
that is the strain energy depends on the invariants of the right Cauchy-Green tensor.
Based on this representation we can calculate the stress as follows
S2
W I1 W I 2 W I 3
W
,
2
C
I1 C I 2 C I 3 C
(4.28)
where (see (1.47), (1.48), (1.51))
I1
1,
C
I 2
I11 C,
C
I 3
I 3C1 .
C
(4.29)
Inserting (4.29) in (4.28) we have
Mechanics of Soft Materials
39
Volokh 2010
W
W
S 2
I1
I 2
I1
W
W 1
1
C I3
C .
I 2
I 3
(4.30)
Transition to the Cauchy stress gives us another form of the constitutive law
W
W
σ J 1FSFT 2 J 1
I1
I 2
I1
W 2
W
B
B I3
I 2
I 3
1 ,
(4.31)
where
B FFT
(4.32)
is the left Cauchy-Green tensor.
We remind that invariants of B coincide with the invariants of C: I a (C) I a (B) .
4.3 Representation in principal stretches
Sometimes, it is more convenient to formulate the constitutive equations in terms of
principal stretches, i , rather than to use invariants. To make the transition to the principal
stretches we need the spectral representation of the right Cauchy-Green tensor
C FT F 12m(1) m(1) 22m( 2) m( 2) 32m(3) m(3) ,
(4.33)
where 2a and m(a ) are eigenvalues and eigenvectors of C accordingly.
Since
I1 12 22 32 , I 2 12 22 12 32 22 32 , I 3 12 22 32 ,
(4.34)
the strain energy can be rewritten as a function of principal stretches i i2
W (C) W (1 , 2 , 3 ) ,
(4.35)
and we can calculate the energy increment as follows
dW (C) dW (1 , 2 , 3 )
W
W
W
d1
d2
d3 .
1
2
3
(4.36)
In order to find d1 we, firstly, get the increment of (4.33)
3
d C {2a da m ( a ) m ( a ) 2a dm ( a ) m ( a ) 2a m ( a ) dm ( a ) } .
(4.37)
a 1
Secondly, we pre-multiply it by m(1) m(1) as follows
(m(1) m(1) ) : d C 21d1 ,
(4.38)
where we accounted for m(1) m( a ) 1a and d (m(1) m(1) ) 0 dm(1) m(1) 0 .
Thus, we have from (4.38)
Mechanics of Soft Materials
40
Volokh 2010
d1
1
(m (1) m (1) ) : d C .
21
(4.39)
Repeating this argument for d2 and d3 we get
dW (C)
W
: dC ,
C
(4.40)
where
3
W
1 W ( a )
m m(a) .
C a1 2a a
(4.41)
Using this derivative we can write the 2nd Piola-Kirchhoff tensor in the form
S2
3
W
1 W ( a )
m m( a ) .
C a 1 a a
(4.42)
It is remarkable that 2PK stress is coaxial with the right Cauchy-Green tensor because
their principal directions coincide. The latter allows us to directly compute the principal 2PK
stresses
Sa
1 W
a a
(no sum) .
(4.43)
By using the spectral decomposition of the deformation gradient, (2.35), we can
compute the Cauchy stresses
σ J 1FSFT
3
1
123
a 1
a
W ( a )
n n( a ) ,
a
(4.44)
which is coaxial with the left Cauchy-Green tensor because their principal directions
coincide. The latter allows us to directly compute the principal Cauchy stresses
a
a W
12 3 a
(no sum) .
(4.45)
4.4 Incompressibility
Many soft materials resist volume changes much stronger than the shape changes.
This experimental observation makes it reasonable to assume the material incompressibility
dV
J det F 1 det F det F T det B det C I 3 .
dV0
(4.46)
This can be considered as a restriction imposed on deformation
(C) 1 I 3 (C) 0 .
(4.47)
The incremental form of the restriction can be written as follows
Mechanics of Soft Materials
41
Volokh 2010
d (C)
: dC 0 .
C
(4.48)
Here / C can be interpreted as a stress producing zero work on the strain
increment – the workless stress. Such stress is indefinite since it can always be scaled by an
indefinite parameter, p .
Adding the workless stress to the stress derived from the strain energy we have
T
W
σ 2 J 1F
p
F ,
C
C
(4.49)
or, substituting from (4.47) into (4.49),
σ 2F
W T
F p1 .
C
(4.50)
The unknown multiplier, p , should be obtained from the solution of equilibrium
equations.
In the case of isotropic material we have
σ p1 2(W1 I1W2 ) B 2W2B2 ,
(4.51)
where
Wa
W
.
I a
(4.52)
In terms of the principal stresses and stretches we have instead of (4.45)
a a
W
p (no sum) .
a
(4.53)
4.5 Examples of strain energy
In this section we consider some popular strain energy functions, W (C) , which in the
absence of residual stresses should meet the following conditions
W
(1) 0 ,
C
W (1) 0,
(4.54)
or, in the case where the strain energy is a function of principal stretches, W (1 , 2 , 3 ) ,
W
(1,1,1) 0 ,
a
W (1,1,1) 0,
(4.55)
We start with the Kirchhoff-Saint Venant material
W (ε)
Mechanics of Soft Materials
2
( trε) 2 ε : ε ,
42
(4.56)
Volokh 2010
where and are the Lame constants and the Green strain is ε (C 1) / 2 . Differentiating
the strain energy density with respect to the Green strain we obtain 2PK stresses
S ij
( mn mn )
W ( kk rr )
ij 2 ij
ij
kk
rr 2 mn mn ,
ij
ij
ki kj rr 2 mi nj mn
ij rr 2 ij
S
W
( trε)1 2 ε .
ε
(4.57)
Alternatively, we can rewrite (4.56) and (4.57) in principal stretches
W (1 , 2 , 3 )
8
(12 22 32 3) 2
4
{(12 1) 2 (22 1) 2 (32 1) 2 } ,
S a (12 22 32 3) / 2 2 (2a 1) / 2 .
(4.58)
(4.59)
This classical material model is generally not used for soft materials. In the case of
small strains, (4.57) is the generalized Hooke law. The use of nonlinear strains, however, is
crucial in order to suppress rigid body motions in finite element computations.
Next strain energy function defines the Neo-Hookean incompressible material
W c( I1 3) c(12 22 32 3),
J 12 3 1 ,
(4.60)
where c is a material constant.
The Neo-Hookean model is the simplest one for modeling soft materials. It is often
used as a starting point for the experimental calibration. A popular generalization of (4.60) is
the Yeoh material defined as a polynomial of the first principal invariant, I1 (C) . For example
Hamdi et al (Polymer Testing 25 (2006) 994-1005) calibrated the following Yeoh model for
natural rubber
W c1 ( I1 3) c2 ( I1 3) 2 c3 ( I1 3)3 , I 3 1 ,
(4.61)
where
c1 0.298 MPa, c2 0.014 MPa, c3 0.00016 MPa .
Another generalization of the Neo-Hookean model is the Mooney-Rivlin material
which defines the dependence of the strain energy on both the first and second principal
invariants. An example of the incompressible Mooney-Rivlin material was calibrated by
Sasso et al (Polymer Testing 27 (2008) 995-1004)
W c1 ( I1 3) c2 ( I 2 3) c3 ( I1 3) 2 c4 ( I1 3)( I 2 3) c5 ( I 2 3) 2 , I 3 1 , (4.62)
Mechanics of Soft Materials
43
Volokh 2010
where
c1 0.59 MPa, c2 0.039 MPa, c3 0.0028 MPa, c4 0.0076 MPa, c5 0.00077 MPa .
Further generalization of the previous models is the Ogden material defined as
p
(1 2 3 3), J 1 ,
p 1 p
N
W
where p p 0,
p
p
p
(4.63)
p 1,...N .
For example, Hamdi et al (Polymer Testing 25 (2006) 994-1005) calibrated the Ogden
model for styrene-butadiene rubber where N 2 and
1 0.638 MPa, 1 3.03, 2 0.025 MPa, 2 2.35 .
4.6 Biaxial test
Biaxial tension tests are usually used to calibrate material models. The theoretical
background for such tests can be readily developed. Let us consider the homogeneous biaxial
deformation of a thin isotropic incompressible sheet
x2 , y2
x1 , y1
11
22
y1 1 x1 ,
y2 2 x2 ,
y3 3 x3 .
(4.64)
By the direct computation we get
F
y
1e1 e1 2e 2 e 2 3e3 e3 .
x
(4.65)
Thus, the coordinate system coincides with the principal directions of stretches and
the constitutive law takes form
σ p1 2(W1 I1W2 ) B 2W2B2 ,
Mechanics of Soft Materials
44
Volokh 2010
11 p 2(W1 I1W2 ) 12 2W214
2
4
22 p 2(W1 I1W2 ) 2 2W22 .
2
4
33 p 2(W1 I1W2 ) 3 2W23
(4.66)
The stresses are homogeneous and the equilibrium equations are satisfied
automatically. From the traction-free boundary conditions on the sheet faces we have
33 0 p 2(W1 I1W2 ) 32 2W234 .
(4.67)
Substituting the Lagrange multiplier in the stress tensor we get
11 2(W1 I1W2 ) (12 32 ) 2W2 (14 34 )
.
22 2(W1 I1W2 ) (22 32 ) 2W2 (42 34 )
(4.68)
I1 tr B 12 22 32 ,
(4.69)
Since
we can rewrite stresses in the form (prove it!)
11 2(12 32 )(W1 W2 22 )
’
22 2(22 32 )(W1 W2 12 )
(4.70)
where the incompressibility condition enforces
3
1
12
.
(4.71)
Equations (4.70) are often used for the experimental calibration of soft materials
under varying ratio of the applied stresses.
4.7* Balloon inflation
Balloon inflation is another popular deformation used for calibration of soft materials.
r
h
q
2r
Mechanics of Soft Materials
45
Volokh 2010
Consider the centrally symmetric inflation of a thin sphere. Its deformation can be
presented in terms of principal stretches along the directions of the spherical coordinate
systems
2 r
r
2 R R
,
h
1
2
r
H
(4.72)
where r, R and h, H are the current and referential radii and thicknesses of the sphere
accordingly and the incompressibility condition is taken into account in the second equation.
The deformation gradient and the left Cauchy-Green tensors take the following forms
F 2 g r G R (g G g G ) ,
(4.73)
B FFT 4 g r g r 2 (g g g g ) .
(4.74)
The Cauchy stress is
σ rr g r g r (g g g g ) ,
(4.75)
rr p 2(W1 I1W2 ) 4 2W2 8
.
p 2(W1 I1W2 ) 2 2W2 4
(4.76)
Since the balloon is very thin we have approximately
rr p 2(W1 I1W2 ) 4 2W28 0 .
(4.77)
Substituting the unknown multiplier, p , from (4.77) into (4.76)2 we have
2(W1 I1W2 ) 2 (1 6 ) 2W24 (1 12 )
2W12 (1 6 ) 2W2 [(22 4 )(2 4 ) (4 8 )]
2W12 (1 6 ) 2W2 2 (2 4 )
.
(4.78)
2(W1 W2 2 )2 (1 6 )
To relate stresses to the internal pressure, q , we consider equilibrium of a half sphere
2 r h r 2 q ,
(4.79)
h
2 H
2H
4H
q2 2
3
(W W2 2 ) (1 6 ) .
r
R
R
R 1
(4.80)
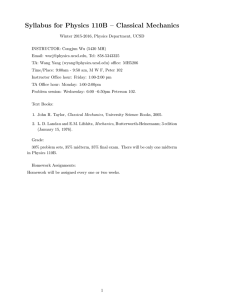
or
This is the pressure-stretch curve. In the case of the Mooney-Rivlin material, for
example we have
W c1 ( I1 3) c2 ( I 2 3) ,
Mechanics of Soft Materials
46
(4.81)
Volokh 2010
W
c1 ,
I1
W1
W2
W
c2 ,
I 2
(4.82)
and
q
4H
(c1 c2 2 ) (1 6 ) .
R
(4.83)
1
0.8
q
4c1 H / R
c2 0.055c1
0.6
0.4
0.2
0
2.5
5
7.5
10
12.5
r/R
15
17.5
20
4.8 Homework
1. Prove (4.12).
2. Prove (4.16).
3. Derive constitutive equations for (4.60).
4. Derive constitutive equations for (4.61).
5. Derive (4.70) from (4.68)-(4.69).
6. Read Section 4.7.
Mechanics of Soft Materials
47
Volokh 2010
5 Anisotropic elasticity
Rubberlike materials are usually isotropic. It is possible, of course, to strengthen them
by embedding fibers in prescribed directions. Nature does so with the soft biological tissues
which usually consist of an isotropic matrix with the embedded and oriented collagen fibers.
The collagen fibers are aligned with the axis of ligaments and tendons forming one
characteristic direction or they can form two characteristic directions in the case of blood
vessels, heart etc.
5.1 Materials with one characteristic direction
Materials enjoying one characteristic direction are also called materials with
transverse isotropy, i.e. isotropy in the planes perpendicular to the preferred direction. Let us
designate the preferred direction by unit vector m0 in the reference configuration. In this
case the strain energy function W (C) W ( I1, I 2 , I3 , I 4 , I5 ) should additionally depend on two
more invariants
T
I 4 m m Fm0 Fm0 m 0 F
Fm 0 C : (m 0 m 0 ) ,
C
(5.1)
I 5 C2 : (m0 m0 ) ,
(5.2)
m Fm 0
(5.3)
m
m
where
is not a unit vector.
The fourth invariant, I 4 , has a clear physical meaning of the squared stretch in the
characteristic direction. The dyad in the parentheses is often called the structural tensor,
which characterizes the internal design of material.
Differentiating (5.1) and (5.2) with respect to C we get accordingly
I 4
m0 m0 ,
C
(5.4)
I 5
m0 Cm0 Cm0 m0 ,
C
(5.5)
Accounting for (4.29) and (5.4)-(5.5) we calculate the constitutive equation
Mechanics of Soft Materials
48
Volokh 2010
5
W
W I a
S2
2
C
a 1 I a C
,(5.6)
Wa
2{(W1 I1W2 ) 1 W2C I 3W3C1 W4m 0 m 0 W5 (m 0 Cm 0 Cm 0 m 0 )}
or
σ J 1FSFT
2 J 1{(W1 I1W2 ) B W2 B 2 I 3W3 1 W4m m W5 (m Bm Bm m)}
,
(5.7)
where B FFT is the left Cauchy-Green tensor.
In the case of incompressible material we have instead of (5.7)
σ p1 2{(W1 I1W2 ) B W2B2 W4m m W5 (m Bm Bm m)} .
(5.8)
5.2 Materials with two characteristic directions
In the case of two preferred directions we designate the second characteristic unit
vector with prime m0
in the reference configuration the strain energy function
W (C) W ( I1, I 2 , I3 , I 4 , I5 , I 6 , I 7 , I8 ) should additionally depend on three more independent
invariants
I 6 C : (m0 m0 ) ,
(5.9)
I 7 C2 : (m0 m0 ) ,
(5.10)
I 8 C : (m 0 m0 ) ,
(5.11)
m Fm0
(5.12)
where
is not a unit vector.
Invariants I 6 , I 7 are analogous to I 4 , I 5 while invariant I 8 is related to both
characteristic directions.
Differentiating (5.9) - (5.11) with respect to C we get accordingly
I 6
m0 m0 ,
C
(5.13)
I 7
m0 Cm0 Cm0 m0 ,
C
(5.14)
I8 1
(m0 m0 m0 m0 ) .
C 2
(5.15)
We notice that the last derivative preserves symmetry.
Mechanics of Soft Materials
49
Volokh 2010
Now the Cauchy stress takes form
Jσ 2(W1 I1W2 ) B 2W2 B 2 2 I 3W3 1
2W4m m 2W5 (m Bm Bm m)
.
2W6m m 2W7 (m Bm Bm m)
(5.16)
W8 (m m m m)
In the case of incompressible material we have instead of (5.16)
σ p1 2(W1 I1W2 ) B 2W2B 2
2W4m m 2W5 (m Bm Bm m)
.
2W6m m 2W7 (m Bm Bm m)
(5.17)
W8 (m m m m)
5.3 Fung model of biological tissue
The presented way of introducing characteristic directions is not unique for a
description of anisotropy. The classical works of Y.C. Fung and his disciples introduced
anisotropy by using the Green strain ε (C 1) / 2 as follows
1
W (ε) ε : α : ε ( 0 ε : β : ε) exp(γ : ε ε : κ : ε ...) ,
2
or
1
W ijkl ij kl ( 0 mnpq mn pq ) exp( ij ij ijkl ij kl ...) .
2
(5.18)
Here α, 0 , β, γ, κ are scalars, second- and fourth- order tensors of material constants which
should be defined in experiments.
The exponential function allows modeling stiffening typical of soft biological tissues.
As an example of the calibrated Fung strain energy we present the constitutive model of a
rabbit carotid artery
c
2
2
2
W {exp(c1 RR
c2
c3 ZZ
2c4 RR 2c5 ZZ 2c6 RR ZZ ) 1} ,
2
(5.19)
with c 26.95 KPa the dimensional and ci s are dimensionless: c1 0.0089 , c2 0.9925 ,
c3 0.4180 , c4 0.0193 , c5 0.0749 , c6 0.0295 .
5.4 Artery under blood pressure
We consider inflation of an artery under blood pressure. The corresponding Boundary
Value Problem (BVP) includes equations of momentum balance (equilibrium)
Mechanics of Soft Materials
50
Volokh 2010
div σ 0 ,
(5.20)
constitutive law
σ p1 F
W T
F ,
ε
(5.21)
and boundary conditions on placements and tractions
y y or σn t ,
(5.22)
where 'div' operator is with respect to the current coordinates y ; σ is the Cauchy stress
tensor; 1 is the second order identity tensor; p is an unknown multiplier of the workless
stress; ε (FT F 1) / 2 is the Green strain tensor; W is the strain energy; t is traction per
unit area of the current surface with the unit outward normal n ; and the barred quantities are
prescribed.
We consider the radial inflation of an artery as a symmetric deformation of an infinite
cylinder. Following Fung we assume the deformation law in the form
r
R 2 A2
a 2 , , z sZ ,
s
(5.23)
where a point occupying position {R, , Z } in the reference configuration is moving to
position {r , , z} in the current configuration; s is the axial stretch; 2 /(2 ) , where
is the artery opening angle in the reference configuration; A and a are the internal artery
radii before and after deformation accordingly.
Current state
{r , , z}
Reference state
{R , , Z }
A
B
No stress
a
Residual stress
g
b
Final stress
The opening central angle, , in a stress-free reference configuration is used to
represent residual stresses, which are one of the most intriguing features of mechanics of
living tissues. While the qualitative nature of residual stresses related to tissue growth is
understood reasonably well, the best way to quantify them remains to be settled.
Accounting for (5.23), the deformation gradient and the nontrivial components of the
Green strain take the following forms
Mechanics of Soft Materials
51
Volokh 2010
F
R
r
g r G R g G sg z G Z ,
sr
R
(5.24)
RR {( R / s r ) 2 1} / 2
2
{( r / R) 1} / 2 ,
2
ZZ {s 1} / 2
(5.25)
where G R , G , G Z and g r , g , g z are the orthonormal bases in cylindrical coordinates at
the reference and current configurations accordingly.
Accounting for (5.21), (5.23)-(5.25) and assuming that the stored energy depends on
the nontrivial strain components only we get the following nonzero components of the
Cauchy stress
R 2 W
p
rr
( sr ) 2 RR
(r ) 2 W
p
.
2
R
2 W
zz p s
ZZ
(5.26)
Besides, there is only one nontrivial equilibrium equation
rr rr
0.
r
r
(5.27)
The traction boundary conditions are
rr (r a) g
,
(
r
b
)
0
rr
(5.28)
where a, b are the inner and outer radii of the artery after the deformation, which were equal
to A, B before the deformation accordingly; and g is the internal pressure.
We integrate equilibrium equation (5.27) over the wall thickness with account of
boundary conditions (5.28) and we get
b(a)
g (a)
a
dr
( rr )
r
b(a)
a
R 2 W ( r ) 2 W
2
2
R
( s r ) RR
dr
,
r
(5.29)
where b(a) a 2 ( B 2 A2 ) /( s) .
Equation (5.29) presents the pressure-radius (g-a) relationship, which we examine
below. Before doing that, however, we introduce dimensionless variables as follows
g
Mechanics of Soft Materials
g
W
r
R
a
b
; W ; r ; R
a ; b ,
c
c
A
A
A
A
52
(5.30)
Volokh 2010
where c is the shear modulus.
Substituting (5.30) in (5.29) we get
b (a )
g (a )
a
R 2 W ( r ) 2 W
2
R 2
( s r ) RR
dr
,
r
(5.31)
where
b (a ) a 2 (( B / A) 2 1) /( s) ,
(5.32)
R 2 s (r 2 a 2 ) 1 .
(5.33)
The dimensionless multiplier p p / c is obtained from (5.27) and (5.28)1 by
integration
r
R ( ) 2 W
d
R (r ) 2 W
( ) 2 W
,
p (r )
(
r
)
g
(
a
)
(
)
(
)
a ( s )2 RR
( s r ) 2 RR
R ( ) 2
(5.34)
and normalized stresses take the form
rr
R 2 W
p
rr
c
( sr ) 2 RR
(r ) 2 W
p
.
c
R 2
2 W
zz zz p s
c
ZZ
(5.35)
We use the Fung model (5.20) to numerically generate the pressure-radius curves and
stresses. Firstly, we set an unprestressed state with 0 and the internal and external
reference radii A 0.71 mm and B 1.10 mm accordingly. The pressure-radius and stress
distribution curves are calculated with the help of Mathematica presented in figure below. We
show stresses for dimensionless pressure
g 0.5 , which corresponds to pressure
g 13.47 KPa for the shear modulus c 26.95 KPa .
Mechanics of Soft Materials
53
Volokh 2010
Secondly, we set a prestressed state with 160 and the internal and external
reference radii A 1.43 mm and B 1.82 mm accordingly. The pressure-radius and stress
distribution curves are presented in figure below. We again show stresses for dimensionless
pressure g 0.5 , which corresponds to pressure g 13.47 KPa for the shear modulus
c 26.95 KPa .
5.5 Homework
1. Is C3 : (m 0 m 0 ) the independent invariant? Hint: Use the Caley-Hamilton formula
(1.39).
2. Prove (5.4).
3. Prove (5.5).
4. Derive (5.7) from (5.6).
5. Prove (5.15).
6. Derive (5.23)1 from the condition of constant volume.
Mechanics of Soft Materials
54
Volokh 2010
6 Viscoelasticity
Rubberlike materials and soft biological tissues can exhibit a time-delayed response.
For example, stresses can decrease under the constant strains – stress relaxation – or strains
can increase under the constant stresses – creep. Such phenomena are usually related to
viscosity, which is a fluid-like property of solids.
6.1 Rheological model
To describe viscosity we start with a simple one-dimensional model, also called
rheological. Rheological models are prototypes for general three-dimensional constitutitive
theories. For example, the spring model is a prototype for hyperelasticity theories. To account
for viscoelasticity we will use the device shown in the figure below.
E
q
E
This rheological model represents the so-called ‘standard solid’, which includes the
classical elasticity due to the top linear spring with the Young modulus E and viscosity due
to the chain of the linear spring with Young modulus E and the linear dashpot with the
viscosity coefficient . The dashpot provides the time delay in the mechanical response of
the device.
We assume, for the sake of simplicity, that the device has a unit length and a unit area
and, consequently, strains and stresses are equal to elongations and forces. The resulting
stress is composed of stresses acting on the top and bottom elements of the device
E
q ,
(6.1)
where E is the stress in the top spring; is the strain of the whole device; and q is
the ‘viscous’ stress in the bottom element.
The viscous stress can be calculated considering the dashpot with the linear
proportionality between the stress and strain rate in as in the case of Newtonian fluids
Mechanics of Soft Materials
55
Volokh 2010
q ,
(6.2)
where is a dashpot strain.
On the other hand, the viscous stress is also equivalent to the stress in the bottom
spring
q E ( ) .
(6.3)
Differentiating (6.3) with respect to time and substituting from (6.2) we get the
evolution equation for the viscous stress
q
q
,
(6.4)
where
(6.5)
E
is the relaxation time and
E
E
(6.6)
is a relative spring stiffness and
q(t ) 0 .
(6.7)
is the initial condition.
Equations (6.1) and (6.4) represent the constitutive description of the model of
‘standard solid’.
Remarkably, the evolution law (6.4) can be integrated by using the integration factor
q
t
t
(q ) exp( ) exp( ) .
(6.8)
Indeed, after simple manipulations on the left hand side of (6.8) we have
d
t
t
{q exp( )} exp( ) .
dt
(6.9)
Integrating on both sides of (6.9) with account of the initial condition (6.7) we have
t
q exp( ) exp( )d ,
t
(6.10)
or
t
q ( ) exp(
Mechanics of Soft Materials
56
t
)d .
(6.11)
Volokh 2010
Substituting (6.11) in (6.1) we get
t
(t ) G (t )
d ,
G(t ) 1 exp(
t
(6.12)
).
(6.13)
The latter is often called the relaxation function.
Let us consider an example of the relaxation test when a step function for strain is
used
0
t
0
0, t 0
.
(t ) H (t ) 0
0 , t 0
(6.14)
Step function, H , is also called Heaviside function and its derivative is -(Paul
Dirac1) function
(t ) (t ) 0 ,
(6.15)
(t ) E 0 ,
(6.16)
Substituting (6.16) in (6.12) we have
t
(t ) ( ) E G (t ) 0 d E G (t ) 0 {E E exp(t / )} 0 .
(6.17)
( E0 E ) 0
E 0
t
0
The considered ‘standard solid’ model includes only one dashpot and relaxation time.
It is possible and, sometimes, useful to extend the model including a number of relaxation
times.
1
Google it!
Mechanics of Soft Materials
57
Volokh 2010
E
E1
1
E2
2
In this case, constitutive equations take the following form accordingly
qi ,
(6.18)
i
qi
qi
i ,
i
(6.19)
where
i
Ei
, i i ,
E
Ei
(6.20)
qi (t ) 0 .
(6.21)
The relaxation function (6.13) takes form
G (t ) 1 i exp(
t
i
i
),
(6.22)
6.2 Constitutive equations
The rheological model developed in the previous paragraph can serve as a prototype
for the constitutive equations of solids. Particularly, we can define the following constitutive
equations in 3D by analogy with (6.18), (6.19), and (6.21)
S S Qi ,
(6.23)
i
Q i S ,
Q
i
(6.24)
Qi (t ) 0 .
(6.25)
i
where S is the second Piola-Kirchhoff stress tensor; Q i is the ith internal stress-like variable.
Evolution equation (6.24) can be integrated analytically as in the previous section and
we get the convolution integral
Mechanics of Soft Materials
58
Volokh 2010
t
S(t ) G (t )
S
d ,
G (t ) 1 exp(
i
t
i
(6.26)
),
(6.27)
where the elastic stress is derived from the strain energy, W ,
S 2
W
.
C
(6.28)
Unfortunately, the direct use of the described model is not practical because most
materials exhibit different responses concerning the volume and shape changes. To make the
difference Flory (1961) proposed the volumetric-deviatoric split of the deformation gradient
F J 1/ 3 F ,
(6.29)
F J 1/ 3F
(6.30)
where
is the isochoric or distortional part of deformation that preserves volume
det F 1 .
(6.31)
Accordingly, tensor J 1/ 3 1 presents the dilatational, i.e. volume-changing, part of the
deformation.
Barring the distortional quantities we have for the Cauchy-Green tensor
C F T F J 2 / 3FT F J 2 / 3C .
(6.32)
Now the strain energy can be considered as a function of the dilatational and
distortional deformations and the constitutive equation (6.28) takes form
S 2
W ( J , C )
W J
W C
2
2
:
.
C
J
C
C
C
S vol
(6.33)
S iso
The first and the second terms on the right-hand side of (6.33) designate the
volumetric and isochoric parts of the stress. We calculate them as follows.
J det C 1 1
JC ,
C
C
2
(6.34)
J 2 / 3
1
J 2 / 3C 1 ,
C
3
(6.35)
C ( J 2 / 3C)
1
J 2 / 3C C 1 J 2 / 3 1 * ,
C
C
3
(6.36)
where 1 * is the fourth-order unity tensor with components
Mechanics of Soft Materials
59
Volokh 2010
(1*)ijkm
Cij
Ckm
ik jm .
(6.37)
Thus, the volumetric and isochoric responses can be presented using (6.33), (6.34),
and (6.36) as follows
S vol
W
JC1 ,
J
1
W
W
2 / 3
S iso
(1 * C 1 C) : 2
J 2 / 3 Dev( 2
),
J
3 C
C
(6.38)
(6.39)
Dev
where we introduced the Lagrangean deviator operator ‘Dev’.
By using the Flory split, we can finally reformulate the constitutive equations of
voscoelasticity in the following differential form
S S vol S iso
Qi ,
(6.40)
i
Q i S iso ,
Q
i
(6.41)
Qi (t ) 0 .
(6.42)
i
Integrating (6.41)-(6.42), we get
t
Q i exp(
t S iso
) d .
i
(6.43)
It is clear now that only distortional deformations are rate-sensitive.
6.3 Numerical integration of constitutive equations
Constitutive equations (6.40), (6.43) are of integral type and it is important to develop
a numerical procedure for calculating stresses for the given strain – the stress update
procedure. As the first step in the direction of the integration algorithm, we assume that
deformation starts only at time t 0 and all stress variables are zero prior to this time. The
latter assumption allows us to rewrite (6.43) in the form
t
Q i exp(
0
t S iso
) d .
i
(6.44)
Let us now partition the time interval of interest into small increments
t t n1 t n ,
(6.45)
where subscripts designate the point on the time scale.
Mechanics of Soft Materials
60
Volokh 2010
We assume that the deformation state of the body is fully determined at time tn
Fn
y n
u
1 n ,
x
x
(6.46)
J n det Fn , Cn FnT Fn , Cn J n2 / 3Cn ,
(6.47)
where y n y(x, tn ) .
We also assume that all stresses are known at time tn : S voln ; S iso
n ; Qi n .
Solution of the balance equations at time t n1 t n t allows us to find kinematical
quantities
Fn1
y n1
u
1 n1 ,
x
x
(6.48)
J n1 det Fn1 , Cn1 FnT1Fn1 , Cn1 J n21/ 3Cn1 ,
(6.49)
and, subsequently, stresses
S voln1
W
JC n11 ,
J n1
2 / 3
S iso
n 1 J n 1 Dev n 1 ( 2
(6.50)
W
).
Cn1
(6.51)
It remains to update the internal variables (6.44) only.
Various computational schemes can be used for updating Qi n1 . We proceed by
writing (6.44) in the form
t S iso
exp( n1
) d
i
0
tn
Q i n1
tn 1
exp(
tn
t n1 S iso
) d .
i
(6.52)
The first term on the right-hand side of (6.52) is calculated as follows
t n t S iso
t n S iso
t n
t
0 exp( i ) d exp( i )0 exp( i ) d Qi n exp( i ) .(6.53)
tn
t
Qi n
To integrate the second term on the right-hand side of (6.52) we make the following
approximation for the exponent
tn t
exp(
tn t / 2
t n1
i
) exp(
t
),
2 i
(6.54)
and, consequently,
Mechanics of Soft Materials
61
Volokh 2010
tn 1
tn
exp(
t n1 S iso
t iso
) d exp(
)(S n1 S iso
n).
i
2 i
(6.55)
Substituting (6.53) and (6.55) in (6.52) we have finally
Q i n1 Q i n exp(
t
t
iso
) (S iso
).
n 1 S n ) exp(
i
2 i
(6.56)
6.4 Homework
1. Prove (6.34).
2. Prove (6.35).
3. Prove (6.36).
4. Derive (6.39) from (6.33)-(6.36).
Mechanics of Soft Materials
62
Volokh 2010
7 Chemo-mechanical coupling
Previously, we attributed displacements, stresses, strains to a material point or an
infinitesimal material volume. In many cases of practical interest additional parameters
reflecting the presence of the specific material/chemical constituents are required. For
example, gels composed of a network of cross-linked molecules swell when a solvent
migrates through it. The concentration of the solvent is changing and the gel deforms
(remember diapers!). When dried the gel shrinks analogously to the consolidation process in
soils where the applied load enforces water to leave the solid skeleton. Soft biological tissues
like cartilage exhibit sound alterations of the fluid phase during walking. Hard materials like
metals and ceramics can undergo the internal atomic migrations. For example, some hard
materials can absorb and store large amounts of hydrogen. In many cases, not only the
concentration of the constituents change but the process of their diffusion is important. We
will always assume that the diffusion process is slow enough to ignore the inertia effects.
7.1 Governing equations
Governing equations accounting for the chemo-mechanical coupling should include
the equations of balance and boundary conditions for the chemical/material constituents of
interest and, besides, the constitutive law. We consider only one additional chemical/material
component of interest for the sake of simplicity. Generalization for the case of a few
components is trivial. The results of Sections 3.5 and 3.6 on Eulerian and Lagrangean forms
of the master balance equations are crucial.
The integral form of the Eulerian balance law is
d
c dV dV φ n dA ,
dt
(7.1)
where c is the true concentration, i.e. the number of molecules (or moles) of the constituent
per unit current volume; is its volumetric supply; and φ is its flux through the current
body surface with the unit outward normal n .
Localizing this equation by getting rid of the integrals, we formulate the field balance
equation
c
div(c v) divφ ,
t
Mechanics of Soft Materials
63
(7.2)
Volokh 2010
where div(...) (...) / yi ei is calculated with respect to spatial coordinates, and boundary
conditions
φ n n
or
f (c) 0 ,
(7.3)
where the barred quantity is prescribed and f is a boundary constraint imposed on the
concentration.
The initial condition takes form
c(t 0) c .
(7.4)
Since the deformed boundary is generally not known in advance, it can be
advantageous to use the Lagrangean or referential description where the equations (7.1)-(7.4)
take the following forms accordingly
d
c0 dV0 0 dV0 φ 0 n 0 dA0 ,
dt
(7.5)
c0
Divφ0 0 ,
t
(7.6)
φ 0 n 0 0 n
or
f 0 (c0 ) 0 ,
c0 (t 0) c0 .
(7.7)
(7.8)
where Div(...) (...) / xi ei is calculated with respect to referential coordinates.
The Eulerian and Lagrangean quantities are related as follows (see Part 3 Balance
Laws)
dV dV0 det
F JdV0 ,
(7. 9)
J
ndA JF T n0 dA0 ,
(7.10)
c J 1c0 ,
(7.11)
J 1 0 ,
(7.12)
φ J 1Fφ 0 .
(7.13)
In addition to the balance laws, we have to formulate the constitutive equations that
can generally be written in the following form
φ0 φ0 (C, c0 , c0 / x) ,
(7.14)
0 0 (C, c0 , c0 / x) ,
(7.15)
where C FT F is the right Cauchy-Green deformation tensor.
Mechanics of Soft Materials
64
Volokh 2010
It is important to emphasize that the flux should depend on the gradient of the
concentration, c0 / x , to provide the second order of the balance equations. It should also
be noticed that constitutive relations (7.14)-(7.15) were formulated for the Lagrangean
quantities while it could alternatively be done for the Eulerian quantities.
7.2 Diffusion through polymer membrane
Based on the described theoretical framework we examine the problem of diffusion of
a liquid through the polymer membrane that was considered in experiments of Paul and EbraLima (J. Appl. Polymer Sci. 14 (1970) 2201-2224).
x3 , y3
p2
Liquid
l
Polymer
x1 , y1
Porous plate
p1
A thin polymer layer is placed on a permeable porous plate and the liquid diffuses
through the membrane under pressure p2 p1 . We assume that the body force and source are
zero: b 0 0 and 0 0 ; and the process is steady state: c0 0 . Under these assumptions the
balance equations reduce to
Divφ0 0 ,
(7.16)
DivT 0 .
(7.17)
The constitutive equations can be defined as follows, for example,
T 2F
W (C, c0 )
,
C
(7.18)
,
x
(7.19)
φ 0 M(c0 , C)
Mechanics of Soft Materials
W (C, c0 )
,
c0
65
(7.20)
Volokh 2010
where M is the mobility tensor; and is the chemical potential.
Motivated by many practical situations it is reasonable to assume that the ground
material (polymer) in the reference state is incompressible and the volume of the material is
altering only due to the supply of new species (molecules of the liquid). This assumption can
be formalized by using the following constraint
(c0 , F) 1 vc0 J 0 ,
(7.21)
where v is the volume of one molecule of the liquid.
The increment of this constraint takes form
c0
: F vc0 JF T : F 0 .
c0
F
(7.22)
Multipliers v and JF T in (7.22) represent the workless chemical potential and
stress accordingly, which can be scaled by arbitrary factor . With account of (7.22) we
modify (7.18) and (7.20) as follows
W
~
T 2F
J F T T J F T ,
C
~
(7.23)
T
W
v .
c0
(7.24)
Since the thickness of the membrane is small as compared to the characteristic lengths
of the device, we can consider the field variations in the lateral directions only. Specifically,
we set the deformation and concentration gradients in the following forms accordingly
F e1 e1 e2 e2 ( x3 )e3 e3 ,
(7.25)
φ0 03e3 .
(7.26)
Substituting (7.25)-(7.26) in (7.23) and (7.19), we get the following non-trivial
stresses and fluxes
~
T11 T22 T11 ,
(7.27)
~
T33 T33 ,
(7.28)
.
x3
(7.29)
03 M 33
We notice that the traction/placement boundary conditions take the following forms
on the upper and lower surfaces of the membrane accordingly
T33 ( L) p2 ,
Mechanics of Soft Materials
66
(7.30)
Volokh 2010
y3 (0) 0 .
(7.31)
Since the stress tensor is divergence-free and T33 constant , we can obtain the
unknown multiplier from boundary condition (7.30)
~
T33 p2 .
(7.32)
Substituting (7.32) in (7.24) we get for the chemical potential
W
~
vT33 vp2 .
c0
(7.33)
We also notice that due to the molecular incompressibility condition the concentration
is related to the stretch as follows
vc0 1.
(7.34)
Substituting (7.33)-(7.34) and (7.29) in (7.16) we get a second order ordinary
differential equation of the chemical balance in term of stretches. To solve it we need to
impose two boundary conditions
f (1 ) (1 ) p1v 0 ,
(7.35)
f (2 ) (2 ) p2 v 0 ,
(7.36)
where 1 (0) and 2 ( L) .
We define the mobility tensor and the Helmholtz free energy function as follows
M ( c0 v) 1
W
c0 D 1
C ,
kT
(7.37)
1
kT
1
NkT (12 22 32 3 2 log[12 3 ])
(vc0 log[1
]
),
2
v
vc0 1 vc0
Elastic energy
(7.38)
Energy of mixing
where and are dimensionless material constants; D is the diffusion coefficient for the
solvent molecules; k is the Boltzmann constant; T is the absolute temperature; N is the
number of polymer chains in the gel divided by the reference volume; is a dimensionless
parameter; and i are the principal stretches.
Substituting (7.37) in (7.26) and accounting for (7.25) we get
03 ( c0 v) 1
c0 D 2
.
kT
x3
(7.39)
Differentiating (7.38) with respect to stretches and concentration and accounting for
(7.34) we find
~
T33 NkT ( 1 ) ,
Mechanics of Soft Materials
67
(7.40)
Volokh 2010
W
1 1
kT (log
2).
c0
(7.41)
Substituting (7.40)-(7.41) in (7.33) we have finally
kT (log
1 1
2 ) NvkT ( 1 ) vp2 .
(7.42)
Substituting (7.42) in (7.29) and (7.16), we have the second-order ordinary
differential equation, which is completed by boundary conditions (7.35)-(7.36).
Based on the numerical solution of the boundary-value problem it is possible to
calculate the increase of the flux through the membrane with the increase of the pressure –
see the figure below for the toluene-rubber data shown in the table. Remarkably, the flux
increase is not proportional to the pressure increase. The latter is a well-established
experimental fact.
k
1.38 10 23 Nm/K
T
p1
303 K
105 N/m 2
17.7 1029 m3
2.36 1010 m 2 /s
6.36 1025 1/ m3
2.65 104 m
0.425
5 .7
3
v
D
N
L
10
8
Theory
v 03
6
cm 3
[ 2
]
cm day
4
Experiment
2
0
0
Mechanics of Soft Materials
100
200
300
p2 p1 [psi]
68
400
Volokh 2010
7.3 Homework
1. Derive (7.40) and (7.41) from (7.38) and (7.34).
2. Read Hong et al (J. Mech. Phys. Solids 56 (2008) 1779-1793).
3. Write a half-page explanation of the physical meaning of the chemical potential based on a
literature review and Google search.
Mechanics of Soft Materials
69
Volokh 2010
8 Electro-mechanical coupling
Soft polymer materials are dielectric, i.e. they do not conduct the electric current.
However, electroactive polymers can deform in response to electric fields. This property is
increasingly used in actuators or artificial muscles that have a great potential of practical
applications. We will consider the basic electro-elasticity of soft materials at large strains.
8.1 Electrostatics
Electron presents the smallest negative charge of e 1.6 1019 C (Coulomb) . All
other charges, both positive and negative, are multipliers of the electron charge. The
charges can be free leading to the electric current or bound as in the case of electroactive
dielectrics. Since the number of charges in the material volumes that we consider is large, we
will always mean the continuum average in the subsequent considerations.
Charges create electric fields that produce forces on other charges. For example, the
force on charge Q is2
f QE ,
(8.1)
where E is the electric field.
According to the experimentally validated Coulomb’s law the force between charges
Q and Q placed at points y and y accordingly is inversely proportional to the squared
distance between the charges
f Q
Q y y
,
4 0 y y 3
(8.2)
E( y )
where 0 8.854 1012 F/m (Farad/meter) is called the permittivity of space.
Based on (8.2) we can write the electric field by superposing many charges smeared
over the space with the charge density q
E( y )
1
4 0
y y
q(y) y y
3
dV .
(8.3)
Based on (8.3) we can obtain (without proof) the Gauss law for a space volume, V ,
enclosed with a surface, A , with the outward unit normal n
E ndA qdV .
0
2
(8.4)
See also Jackson JD (1999) Classical Electrodynamics. John Wiley & Sons.
Mechanics of Soft Materials
70
Volokh 2010
The Gauss law was derived for vacuum in the absence of matter. In the presence of
matter, the bound charges can be slightly displaced with respect to each other when the
electric potential is applied. Such relative displacement is called polarization. To characterize
the phenomenon it is possible to introduce the polarization vector, P . For example, if we
have N atoms per unit volume with positive charge q0 (nucleus) and negative charge q0
(electrons) then P Nq 0d where d is a relative average displacement of the negative charges
with respect to positive charges. The polarization vector changes the charge on the right hand
side of (8.4)
E ndA qdV P ndA .
0
(8.5)
It is convenient to introduce the electric displacement vector
D 0E P
(8.6)
D ndA qdV .
(8.7)
and rewrite (8.5) in the form
This equation is valid for any volume and, consequently, we can localize it
divD q .
(8.8)
Formulas (8.7) and (8.8) represent the integral and differential forms of the first
equation of electrostatics.
To derive the second equation of electrostatics we notice that
y y
y y
3
1
(
).
y y y
(8.9)
Substituting (8.9) in (8.3) we obtain
(y )
,
y
E( y )
(8.10)
where
(y )
Mechanics of Soft Materials
q(y )
1
4 0
y y dV .
71
(8.11)
Volokh 2010
is called the electric potential or voltage.
To clarify the physical meaning of the electric potential we consider the work that
should be done against the electric field in order to move charge Q from point y 1 to point y 2
y2
y2
W QE dy Q
y1
y1
dy Q (y 2 ) Q (y1 ) .
y
(8.12)
Thus, the work is equal to the difference in the electrical potentials at points y 1 and
y 2 times charge Q .
Since the integral in (8.12) does not depend on the integration path we have for any
closed curve l
E dy 0 .
(8.13)
By building any surface A on the curve l and using the Stokes formula we can
rewrite (8.13) in the form
n
A
l
E dy (curl E) ndA 0 .
(8.14)
Since the surface can be chosen arbitrarily, we can localize the integral equation as
follows
curl E 0 .
(8.15)
We notice that the electric field derived from the electric potential always obeys
(8.16): see (1.96).
Formulas (8.14) and (8.15) represent the integral and differential forms of the second
equation of electrostatics.
With the help of (8.7) and (8.13) we can derive the boundary conditions on a surface
separating two materials with different electric fields and displacements.
Mechanics of Soft Materials
72
Volokh 2010
n
Boundary
surface
A
E2 , D2
h0
qA
l
E1 , D1
s
l
Firstly, we consider a small cylinder with the base area A and height h 0 . In this
case, the left- and right- hand sides of (8.7) take the following forms accordingly
D ndA D
2
nA D1 (n)A (D2 D1 ) nA ,
qdV q
A
(8.16)
A ,
(8.17)
where q A is a charge on the boundary surface.
Substituting (8.16) and (8.17) in (8.7) we can write the following boundary condition
(D2 D1 ) n q A .
(8.18)
Secondly, we consider a closed path, l , whose long arm directions are defined by the
cross product of the surface tangent, s , and normal, n , vectors. In this case, (8.13) takes the
following form
E dy E
1
(n s)l E 2 (n s)l
ls (E1 n E 2 n) 0
.
(8.19)
Since (8.19) is correct for any tangent s we obtain the second boundary condition
(E1 E 2 ) n 0 .
(8.20)
Finally, we notice that the polarization vector should be defined as a function of the
electric field or, in other words, the constitutive equation should be written in the form
P P(E) .
(8.21)
The simplest form of the constitutive equation in the case of isotropic media is the
proportionality between the polarization and the electric field
P 0 E ,
(8.22)
where is called the electric susceptibility of the medium.
Substituting (8.22) in (8.6) we get
D 0 (1 )E E ,
(8.23)
Mechanics of Soft Materials
73
Volokh 2010
where is called the electric permittivity and the ratio / 0 1 is called the dielectric
constant.
8.2 Angular momentum balance
Equations of the angular momentum balance (3.28) should be modified to include the
body couple due to the electric field, K ,
d
r vdV (r b K ) dV r t dA .
dt
(8.24)
Localizing this equation as it was done in Section 3.4 we obtain
ijk kj Ki 0 .
(8.25)
This equation means that the Cauchy stress is not symmetric anymore in the presence of the
electric field: σ σT !
Though there are a number of theories defining the constitutive equation for the
electric body force and body couple (Pao YH (1978) Electromagnetic Forces in Deformable
Continua. In: Mechanics Today, vol.4, ed. S. Nemat-Nasser. Pergamon Press.), all of them
reduce to the same form in the case of electrostatics and zero distributed body charge, q 0 ,
b (grad E)P ,
(8.26)
K PE.
(8.27)
Following Maxwell’s idea for magnetism, some authors represent the electric body
force as a divergence of the “Maxwell stress” tensor, σ M ,
b (grad E)P divσ M .
(8.28)
Such representation is not unique and it can take the following popular form, for example,
σ M E ( 0 E P) 0 (E E)1 .
2
(8.29)
D
Combining the elastic and Maxwell stresses it is possible to introduce the total stress
~ σ σM ,
(8.30)
σ
which obeys the equilibrium equation (3.25) without body forces
~0.
divσ
(8.31)
Substituting from (8.27), (8.29), and (8.30) in the equation (8.25) of the angular
momentum balance we get
ijk~kj 0 ,
Mechanics of Soft Materials
74
(8.32)
Volokh 2010
i.e. the total stress is symmetric, contrary to the Cauchy stress
~σ
~T .
σ
(8.33)
We notice, however, that the body couple is zero in the case of the constitutive
equation (8.22)
K 0 E E 0 .
(8.34)
P
8.3 Example of a dielectric actuator
Current state
Reference state
x3 , y3
x1 , y1
A
A0
x2 , y 2
q A Q / A
L0
L
Dielectric elastomer
q A Q / A
Compliant electrodes
We will assume that the polarization of dielectric does not depend on its deformation
and, consequently, (8.22) is valid: P 0 E . In this case, boundary-value problem of
electrostatics is composed of the following field equations
divE 0 ,
(8.35)
curl E 0 ,
(8.36)
( 0E2 E1 ) n q A ,
(8.37)
(E1 E 2 ) n 0 ,
(8.38)
and boundary conditions
where E1 and E 2 are electric fields inside and outside the plate.
Momentum balance equations are
~ 0, σ
~σ
~T ,
divσ
and the corresponding traction boundary conditions are
~ σ
~ )n 0 ,
(σ
1
2
(8.39)
(8.40)
~ and σ
~ are stress fields inside and outside the plate.
where σ
1
2
The constitutive law for the total stress of isotropic incompressible hyperelastic
material takes the following form accounting for (8.23) and (8.29)
Mechanics of Soft Materials
75
Volokh 2010
~ p1 2(W I W ) B 2W B 2 E E 0 (E E)1 ,
σ
1
1 2
2
2
(8.41)
where p is the Lagrange multiplier; Wa W / I a with I a the principal invariants of
B FFT .
We assume the homogeneous solution of the boundary-value problem in the form
F 1/ 2 (e1 e1 e 2 e 2 ) e3 e3 ,
(8.42)
E1 Ee3 , E2 0 ,
(8.43)
where the lateral stretch is
L
.
L0
(8.44)
We notice that the material is incompressible, det F 1 , and, consequently, with
account of (8.44) we have
A A0 / .
AL A0 L0 ,
(8.45)
The homogeneous solution obeys field equations (8.35), (8.36), (8.39) automatically
and substituting (8.43) and (8.45) in boundary conditions (8.37), (8.38) we get
E
qA
Q Q
.
A A0
(8.46)
Substituting (8.42) and (8.43) in (8.41) we have
2
Q
,
~11 ~22 p 2(W1 I1W2 ) 1 2W2 2 0
2 A0
2
(8.47)
2
Q 0 Q
.
~33 p 2(W1 I1W2 ) 2 2W2 4 0
(8.48)
2 A0
A0
Assuming the stress-free deformation, ~11 ~22 ~33 0 , that obeys (8.40) and
subtracting (8.48) from (8.47) we get
0 Q2 2
2(W1 I1W2 )( ) 2W2 ( )
0.
A02
1
2
2
4
(8.49)
This equation allows us to calculate the lateral stretch for the given charge Q .
Consider, for example, the Neo-Hookean material
W C1 ( I1 3), W1 C1 .
(8.50)
Substituting (8.50) in (8.49) we get
Mechanics of Soft Materials
76
Volokh 2010
( 1 2 ) 2
0 Q2
Q *2 ,
2
2C1 A0
(8.51)
Q*2
where Q * is a dimensionless charge.
The relationship (8.51) is presented graphically below and it shows that the dielectric
is thinning with the growing charge as expected.
6
5
4
Q* 3
2
1
0
0.3
0.4
0.5
0.6
0.7
0.8
L / L0
0.9
1
8.4 Homework
1. Prove (8.9).
2. Check whether (8.29) obeys (8.28).
3. Derive (8.32).
Mechanics of Soft Materials
77
Volokh 2010