م . نسح
advertisement

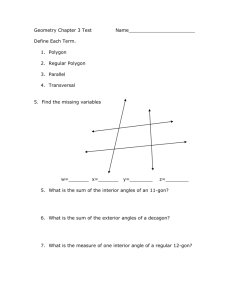
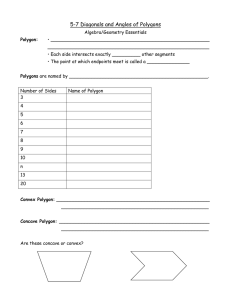
م.م عالء الدين عباس عبد الحسن Sunday 4/11/2012 ELLIPSE-GENERATING ALGORITHMS * Loosely stated, an ellipse is an elongated circle. We can also describe an ellipse as a modified circle whose radius varies from a maximum value in one direction to a minimum value in the perpendicular direction. * The straight-line segments through the interior of the ellipse in these two perpendicular directions are referred to as the major and minor axes of the ellipse. 2 Ellipse-Generating Algorithms Ellipse – A modified circle whose radius varies from a maximum value in one direction (major axis) to a minimum value in the perpendicular direction (minor axis). F1 d1 P=(x,y) F2 d2 The sum of the two distances d1 and d2, between the fixed positions F1 and F2 (called the foci of the ellipse) to any point P on the ellipse, is the same value, i.e. d1 + d3 2 = constant Ellipse Properties * Expressing distances d1 and d2 in terms of the focal coordinates F1 = (x1, x2) and F2 = (x2, y2), we have: ( x x1 )2 ( y y1 )2 ( x x2 )2 ( y y2 )2 constant ry rx * Cartesian coordinates: * Polar coordinates: 2 x xc y yc 1 rx ry 2 x xc rx cos y yc ry sin 4 Ellipse Algorithms * Symmetry between quadrants * Not symmetric between the two octants of a quadrant * Thus, we must calculate pixel positions along the elliptical arc through one quadrant and then we obtain positions in the remaining 3 quadrants by symmetry (-x, y) (x, y) ry rx (-x, -y) 5 (x, -y) Polar Ellipse Algorithm Begin xc , yc --- ellipse Center r1,r2 -- Radiuses x , y --- point on ellipse theta -- angle dTheta --- angle change dTheta = 1/Max(r1,r2) for (theta =0 to Pi*2 step = dTheta) begin x=xc + r1 * Cos(theta) y=yc + r2 * Sin(theta) point(x , y) endfor end ELLIPSE-GENERATING ALGORITHMS * Polar coordinates: sin θ = (y – yc )/ry cos θ =(x – xc) / rx dx = -rx sin θ dθ Dy = ry cos θ dθ Dx= -rx (y – yc )/ry = (rx/ry ) (yc -y)dθ Dy = ry (x – xc) / rx = ( ry/rx) ( x – xc) dθ 7 Ellipse Algorithm Begin xc , yc --- ellipse Center rx,ry -- Radiuses x , y --- point on ellipse theta -- angle dTheta --- angle change dTheta = 1/Max(r1,r2) for (theta =0 to Pi*2 step = dTheta) begin x = x + rx / ry * (yc-y) * dtheta y = y + ry / rx * (x-xc) * dtheta point(x , y) endfor end Polygon *A polygon can be represented as a number of line segments connected end to end to form a close figure. Alternatively, it may be represented as the points where the sides of the polygon are connected. The line segments which make up the polygon boundary are called sides or edges. The end points of the sides are called the polygon vertices. 9 Polygon Classifications An interior angle of a polygon is an angle inside the polygon boundary that is formed by two adjacent edges. If all interior angles of a polygon are less than or equal to 180 , the polygon is convex. An equivalent definition of a convex polygon is that its interior lies completely on one side of the infinite extension line of any one of its edges. Also, if we select any two points in the interior of a convex polygon, the line segment joining the two points is also in the interior. A polygon that is not convexis called a concave polygon. Figure 3-42gives examples of convex and concave polygons. The term degenerate polygon is often used to describe a set of vertices that are collinear or that have repeated coordinate positions. Collinear vertices generate a line segment. Repeated vertex positions can generate a polygon shape with extraneous lines, overlapping edges, or edges that have a length equal to 0. Sometimes the term degenerate polygon is also applied to a vertex list that contains fewer than three coordinate positions. r 10 Polygon Classifications 11 Identifying Concave Polygons * A concave polygon has at least one interior angle greater than 180r. Also, the extension of some edges of a concave polygon will intersect other edges, and some * pair of interior points will produce a line segment that intersects the polygon boundary. Therefore, we can use any one of these characteristics of a concave polygon as a basis for constructing an identification algorithm. 12 Polar polygon Algorithm Begin xc , yc --- polygon Center r -- Radius N -- number of vertices theta -- angle dTheta --- angle change dTheta = twPI/ N xs=xc+r,ys=yc for (i= 1 to N ) begin theta = theta + dtheta xe = xc + r * Cos(theta). ye = yc - r * Sin(theta). Line (xs, ys)-(xe, ye). Set xs=xe, ys=ye. endfor end 14