Icarus 206 (2010) 431–445
Contents lists available at ScienceDirect
Icarus
journal homepage: www.elsevier.com/locate/icarus
Estimating the masses of Saturn’s A and B rings from high-optical depth
N-body simulations and stellar occultations
Stuart J. Robbins a,*, Glen R. Stewart a, Mark C. Lewis b, Joshua E. Colwell c, Miodrag Sremčević a
a
Laboratory for Atmospheric and Space Physics, University of Colorado at Boulder, UCB 392, Boulder, CO 80309, United States
Department of Computer Science, Trinity University, Department of Computer Science, San Antonio, TX 78212, United States
c
Department of Physics, University of Central Florida, 4000 Central Florida Blvd., Orlando, FL 32816, United States
b
a r t i c l e
i n f o
Article history:
Received 22 November 2008
Revised 3 September 2009
Accepted 12 September 2009
Available online 26 September 2009
Keywords:
Saturn
Saturn, Rings
Occultations
a b s t r a c t
We have completed a series of local N-body simulations of Saturn’s B and A rings in order to identify systematic differences in the degree of particle clumping into self-gravity wakes as a function of orbital distance from Saturn and dynamical optical depth (a function of surface density). These simulations revealed
that the normal optical depth of the final configuration can be substantially lower than one would infer
from a uniform distribution of particles. Adding more particles to the simulation simply piles more particles onto the self-gravity wakes while leaving relatively clear gaps between the wakes. Estimating the
mass from the observed optical depth is therefore a non-linear problem. These simulations may explain
why the Cassini UVIS instrument has detected starlight at low incidence angles through regions of the B
ring that have average normal optical depths substantially greater than unity at some observation geometries [Colwell, J.E., Esposito, L.W., Sremčević, M., Stewart, G.R., McClintock, W.E., 2007. Icarus 190, 127–
144]. We provide a plausible internal density of the particles in the A and B rings based upon fitting the
results of our simulations with Cassini UVIS stellar occultation data. We simulated Cassini-like occultations through our simulation cells, calculated optical depths, and attempted to extrapolate to the values
that Cassini observes. We needed to extrapolate because even initial optical depths of >4 (r > 240 g cm2)
only yielded final optical depths no greater than 2.8, smaller than the largest measured B ring optical
depths. This extrapolation introduces a significant amount of uncertainty, and we chose to be conservative in our overall mass estimates. From our simulations, we infer the surface density of the A ring to be
r ¼ 42—54 g cm2 , which corresponds to a mass of 0:5 1019 kg—0:7 1019 kg. We infer a minimum
surface density of r ¼ 240—480 g cm2 for Saturn’s B ring, which corresponds to a minimum mass estimate of 4 1019 kg—7 1019 kg. The A ring mass estimate agrees well with previous analyses, while the
B ring is at least 40% larger. In sum, our lower limit estimate is that the total mass of Saturn’s ring system
is 120–200% the mass of the moon Mimas, but significantly larger values would be plausible given the
limitations of our simulations. A significantly larger mass for Saturn’s rings favors a primordial origin
for the rings because the disruption of a former satellite of the required mass would be unlikely after
the decay of the late heavy bombardment of planetary surfaces.
Ó 2009 Elsevier Inc. All rights reserved.
1. Introduction
It is surprisingly difficult to make an accurate measurement of
the total mass of Saturn’s rings. When we observe a local smallscale patch in the rings, it is natural to assume that the ring particles
are uniformly distributed across the plane of the rings within that
patch as long as it is small compared to the large-scale (>10 km) radial structures that are observed in the rings. This assumption implies that the ratio of the normal optical depth, s\, to the surface
density, r, of the rings should be roughly constant. By measuring
the wavelength of density waves in the rings, we can infer the sur* Corresponding author. Fax: +1 303 492 6946.
E-mail address: stuart.robbins@colorado.edu (S.J. Robbins).
0019-1035/$ - see front matter Ó 2009 Elsevier Inc. All rights reserved.
doi:10.1016/j.icarus.2009.09.012
face density which can be combined with the optical depth in the
regions that contain waves to obtain a value for the opacity,
j = s\/r. The value of the opacity obtained from density waves in
the A ring is about 102 cm2 g1 (Esposito et al., 1983; Tiscareno
et al., 2007). In the Cassini Division, the opacity is 5 times larger,
indicating a smaller maximum particle size than in the A ring
(Colwell et al., 2009). Using measured values for the optical depth
of the entire ring system and the opacity inferred from A ring density waves, Esposito et al. (1983) calculated a total mass of
2:8 1019 kg for Saturn’s rings. However, this value is likely to only
be a lower bound on the ring mass because it neglects the possibility of particles clumping into large gravitational aggregates.
One of the most surprising results of the Cassini mission to Saturn is that the transparency of the rings measured during stellar
432
S.J. Robbins et al. / Icarus 206 (2010) 431–445
occultations is not accurately modeled by the path length of the
starlight through the rings (Colwell et al., 2006, 2007; Hedman
et al., 2007). Stellar occultations of the more massive B ring observed by the Cassini UVIS instrument find that the line-of-sight
optical depth is roughly independent of the viewing angle out of
the ring plane, which implies that the B ring is primarily composed
of opaque clumps of particles separated by nearly transparent gaps
(Colwell et al., 2007). Dynamically, this is thought to be the result
of self-gravity wakes, first predicted in stellar systems by Julian
and Toomre (1966) and shown to occur in Saturn’s rings by Salo
(1992, 1995). As a result, the observed transparency of the B ring
is really only measuring the fractional area of the rings that is
not covered by opaque clumps of particles; the measurement does
not yield the mass of ring particles contained in the opaque
clumps. Hence, to obtain a more accurate estimate of the mass of
the B ring, we must model the structure of the unresolved particle
clumps in the ring.
Our approach to the problem is to measure the transparency as
a function of viewing geometry of simulations of local patches in
the rings. By comparing the transparency of our simulations with
the Cassini UVIS measurements of the rings, we can constrain the
internal mass density of the ring particles that best match the
observations. We can then use our simulations to estimate the
mass of the densest regions in Saturn’s rings where density waves
are not available to measure the surface mass density directly. Previously, Salo et al. (2004), French et al. (2007), and Porco et al.
(2008) have used N-body simulations to model the well-known
azimuthal brightness asymmetry of Saturn’s rings. A good independent check of our procedure is that we obtain essentially the
same internal particle density as was found in these previous studies. We extend these previous studies by making a much more
extensive exploration of parameter space and by simulating the
highest optical depth rings that have been reported in the literature so far. In Section 2, we explain our numerical methods and
parameter space. In Section 3, we briefly discuss the qualitative aspects of the meso-scale structure of the rings in our simulations
(deca to hectometers). In Section 4, we discuss our process and results of simulating occultations through our simulated ring cells
and the constraints on parameters from Cassini results. In Section
5, we discuss the implications of our new estimate for the mass of
the rings for the feasibility of various models for the origin of Saturn’s rings.
2. N-body code
2.1. Numerical methods
The simulations performed in this work are all N-body simulations that assume smooth, inelastic, hard spheres. The particle motions are modeled using a rotating pseudo-Cartesian coordinate
system in the usual Hill approximation (see Stewart, 1991, for
example):
2
d x
2
2X
dy
@V SG
3X2 x ¼ dt
@x
2
þ 2X
dx
@V SG
¼
dt
@y
2
þ X2 z ¼ dt
2
d y
dt
2
d z
dt
ð1Þ
@V SG
@z
where VSG is the gravitational potential due to the self-gravity of all
the other particles in the simulation. The (x, y, z) coordinates are defined in terms of cylindrical coordinates as x = r r0, y = r0(h Xt),
z = z, where X is the angular velocity of a reference circular orbit at
a distance r0 from the center of Saturn. The numerical solution to
these equations was broken up into two parts during each time step
in the simulation. In the first part of the time step, the simulation
ignored the right hand sides of Eq. (1), and moved the particles forward using the following analytic solution of the unperturbed Hill’s
equations (Stewart, 1991):
x=r0 ¼ X e cos u
y=r 0 ¼ Y þ 2e sin u
ð2Þ
z=r 0 ¼ i cos f
where X, e, and i are constants of the unperturbed motion and Y, u,
and f are linear functions of time:
YðtÞ ¼ Y 0 ð3=2ÞX Xt
uðtÞ ¼ u0 þ Xt
ð3Þ
fðtÞ ¼ f0 þ Xt
In analogy with common usage in plasma physics, this collection of variables (X, Y, u, e, f, i), will be referred to in this paper as
‘‘guiding center variables” since ( X, Y) gives the coordinates of
the orbit-averaged motion on an unperturbed eccentric and inclined orbit. In other words, X is essentially the scaled semimajor
axis and Y is the mean anomaly measured in the local rotating reference frame. Thus, every time step requires a transformation of
every particle’s Cartesian coordinates and velocities to its guiding
center variables. This approximation ignores the oblateness of Saturn, which would produce small fractional changes in the timerate-of-change of Y, u, and f. Although these frequency shifts are
important for the dynamics of density waves, they are not expected to have a significant effect on the local formation of selfgravity wakes.
In the second part of the time step, the simulation calculates
the acceleration of every particle due to the gravitational accelerations of the other particles. The self-gravity is calculated using a
tree method similar to that of Barnes and Hut (1986) with the octree replaced by a k-D tree (Bentley, 1975). In this method, the
simulation region is divided into a nested series of cells until the
smallest cell of each branch of the k-D tree only contains a small
number of particles. Calculation of the gravitational acceleration
on a particle begins at the largest cell size in the tree. First the angle that the cell subtends as seen from the accelerated particle is
computed. If this ‘‘opening angle” is less than a critical value, b,
the acceleration on the particle from the entire cell is calculated
from the cell’s gravitational monopole. If the opening angle is larger than the critical value, we descend down the tree to the cell’s
children and the same test is applied to each daughter cell. If the
opening angle is still too large, we descend further and repeat
the process. This process repeats until either a small enough cell
is found or the descent terminates in a cell that is a leaf (single
particle) in the tree (Lewis and Stewart, 2008). In this latter case,
the acceleration is computed from each particle separately. The
simulations presented in this paper use b = 0.3 in effective units
of radians. Using this method, the time required for gravity calculations scales as N log N rather than N2.
After the gravitational accelerations for the time step have been
calculated and the trajectories of the particles have been modified,
the collisions are processed in a discrete-event style for the duration of time in a single step. Collisions between particles are treated as smooth, inelastic, hard spheres with a velocity-dependent
coefficient of restitution of the form (Bridges et al., 1984):
eðv ? Þ ¼ min 0:34v ?0:234 ; 1
ð4Þ
According to this rule, only the component of the relative velocity that is perpendicular to the plane of contact is altered by the collision. We adopted the link-cell method to search for collisions
between ring particles (Hockney et al., 1974). In this method, the
S.J. Robbins et al. / Icarus 206 (2010) 431–445
simulation region is broken up into a two-dimensional spatial grid.
Each cell in this grid keeps a list of the particles whose centers are
located in that cell. This eliminates the need to ever perform an
exhaustive search among all pairs of particles. Instead, the search
can be done just between pairs of particles in adjacent cells. As a
consequence, the choice for the size of the cells in the grid and
the size of the time step are linked in order to preserve the assumption that only adjacent cells must be searched. In particular, we
choose the cell size to be the size of the particles plus several times
the product of the time step and the average relative velocity between the particles. This last product tells us how far any two particles are expected to move relative to one another over the course
of one time step. The average relative speed is determined by sampling pairs of nearby particles at regular intervals during the simulation. In general, the time step is a small fraction of an orbit period,
so the motion of a particle during a time step can be approximated
from the equations of motion quite easily.
The search for collisions is done by running through the grid,
and for each cell, searching against its own particles as well as
those in the eight surrounding adjacent cells. Each pair of particles
is checked to see if they overlap during the course of the time step.
When a pair of particles is found that undergoes a collision during
the current time step, that pair is added to a list that is sorted by
the collision time. After the entire grid has been processed in this
way, the collisions are processed. This is done by advancing the
particles to the point of the collision and then updating their velocities appropriately. The particles are then marked with a time
stamp saying that their current positions are for that point in time.
All subsequent collisions for those two particles are then removed
from the list of collisions and the grid is used to check for new collisions with the particles with new trajectories. This process is repeated until the end of the time step is reached.
Like Wisdom and Tremaine (1988), we use periodic, sliding box
boundary conditions. In this method, the central computational
box is surrounded by eight ‘‘ghost” boxes that are exact images
of the central box. The three ghost boxes located farther from
Saturn slide uniformly in the negative y-direction, while the three
ghost boxes closer to Saturn slide uniformly in the positive y-direction so as to maintain the uniform shear rate predicted for circular
orbits in the Hill’s approximation. Any particles that leave the central box are replaced by particles entering the central box from one
of the surrounding ghost boxes. The error in the average vertical
component of the self-gravity of the ring particles introduced by
using only one level of mirror cells for our simulations was on
the order of 1%.
For the initial conditions of the simulations, particle guiding
centers were placed randomly through the cell with equal probabilities for all radial and azimuthal positions. The eccentricities,
inclinations, and epicyclic phase angles were also selected at random from uniform probability distributions. The eccentricities
were distributed between 0 and 109 to give the effect of a cold
distribution with small free eccentricities. The inclinations were
distributed between 0 and 2 108 radian. The larger range in
inclinations was used to effectively reduce the chances of particles
originally overlapping with one another for numerical reasons. The
epicyclic phases were selected randomly between p and +p. The
results presented here for all simulations were taken at a time
when the choice of initial conditions had been erased by the evolution of the system, which occurs by orbit number 5. This was
determined by visual inspection, monitoring the Toomre Q stability value, and calculating the velocity dispersion (Toomre, 1964).
2.2. Parameter space
One hundred sixty-two simulations were run to 10 full orbital
periods for this study. We ran two main categories of simulations
433
– single-sized particles and simulations with a particle size distribution governed by the power-law dN/dR / R3, where R is the particle radius (this is near the value found by French and Nicholson
(2000)). Single-sized particle simulations had particles with a radius of 1 m. Simulations with a particle size distribution had sizes
constrained to provide the same surface density as their singlesized simulation counterparts for a given optical depth; for simulations with particle radii spanning a factor of 10, radii ranged
between 0:256 m 6 R 6 2:56 m.
Simulation cell sizes were square with length L in the x- and ydirections. Most simulations were run with internal particle densities q of either 0.85 g cm3 or 0.45 g cm3; we also ran a few simulations with q = 0.65 g cm3. We chose these densities in order to
bracket the assumed range of possible densities of ring particles
based on spectroscopic results and inferred moonlet densities.
The former have shown that the rings are mostly water ice, which
has a density 0.92 g cm3, though actual ring particles are likely
to have some degree of porosity. Our lower limit is based on the inferred densities of small moonlets in the saturnian system (e.g.,
Renner et al., 2005; Porco et al., 2007) as well as to match simulations performed by other groups (e.g., French et al., 2007).
B ring simulations were set at a distance of 100 Mm from Saturn
(near the inner edge of the B ring core), and A ring simulations
were 130 Mm from Saturn (mid-A ring).
We initially laid out the simulations to run with N 100,000
particles. However, we expect gravitational instabilities to form
at the Toomre critical wavelength, kcr ¼ pGr=X, where G is the
gravitational constant, r is the surface density, and X is the orbital
frequency (Toomre, 1964). For low optical depths, kcr is very small
(2 to 10 m) and it is not necessary to conduct these simulations
with 100,000 particles. We established an upper-limit on the size
of the simulation cell L at 100kcr , such that if 100,000 particles
would result in L > 100kcr , we reduced the number of particles until the cell size was appropriately small. This is still significantly
larger than other researchers (e.g., French et al., 2007), even though
at the low end we included only 3800 particles. On the other end of
the size range, we did not conduct any simulations with cell sizes
L < 6kcr ; we increased L and hence the particle number to ensure
this lower bound. This caused our most populated simulation to
have 1.3 million particles. We provide a complete listing and
parameter table on the website http://saturn.sjrdesign.net that includes N for each simulation.
Previously completed simulations by Heikki Salo (e.g., French
et al., 2007) typically occupy L ¼ 4kcr , while simulations presented
by Porco et al. (2008) use 4kcr 10kcr . Our simulations would need
to be compared with identically chosen parameters to determine if
our L choice is preferable over Porco et al.’s since the area is comparable, but larger cell sizes than used by French et al. (2007) allow
us to better constrain the properties of each simulation for two
main reasons. First, a larger cell size allows us to average over a
larger area and more structures when deriving properties such as
tendency for clump formation, the effective height of the structures, or optical depth. Second, numerical artifacts tend to occur
when cell sizes are too small due to the mirror cell boundary conditions. A larger physical cell suppresses these artifacts and allows
larger structures to develop than would otherwise be possible.
The main parameter we varied was the dynamical optical
depth, sdyn, which is equal to the sum of the cross-section area of
the particles divided by the area of the cell. Though we discuss this
further in Section 4.1, from this point on in the paper we will use s
to refer to sdyn unless otherwise stated. We varied s by starting
with s = 2.0 and multiplying it successively by factors of 21/4:
0.0884, 0.105, 0.125, 0.149, 0.177, 0.210, 0.250, 0.297, 0.354,
0.420, 0.500, 0.595, 0.707, 0.841, 1.000 for the A and B rings, in
addition to 1.189, 1.414, 1.682, and 2.000 for the B ring. All of these
were run with parameters q = 0.45 g cm3 and R ¼ 1 m; for the
434
S.J. Robbins et al. / Icarus 206 (2010) 431–445
size distribution, we did not simulate s = 2.000 in the B ring nor
s = 1.000 in the A ring. In addition, we completed s = 2.378,
2.828, 3.364, and 4.000 simulations for the B ring, where
R ¼ 1 m. For q ¼ 0:85 g cm3 and R ¼ 1 m, s = 2.000 was not simulated for the B ring, and s = 1.000 was not simulated in the A ring.
For a size distribution at this high internal density, we only simulated up to s = 1.000 and s = 0.500 for the B and A rings, respectively. We did not do these simulations due to the computer
time required. We realize that it may be difficult to follow all the
various combinations, and so we have created several tables on
the website http://saturn.sjrdesign.net to provide a complete
parameter-space listing of our simulations.
Surface density was calculated by r = 4sRq/3. For
q ¼ 0:45 g cm3 simulations, it ranged between r ¼ 5:30 g cm2
for s = 0.0884 up to r ¼ 240 g cm2 for s = 4.000. For
q ¼ 0:85 g cm3 simulations, it ranged between r ¼ 10:0 g cm2
for s = 0.0884 up to r ¼ 191 g cm2 for s = 1.682.
The simulations with the highest internal particle density and
those simulations with a particle size distribution were more limited in s because of the L P 6kcr constraint and the subsequent large
amounts of computer time required. All simulations were performed on an Apple MacPro computer with dual quad-cores operating at 2.8 GHz with 6 GB of RAM. Most were run with the version
4.2 g++ compiler, though the highest-s simulations were run with
an Intel C++ compiler. Simulations took anywhere from 0.5 h of
CPU time for the smallest R ¼ 1 m, q ¼ 0:45 g cm3 , s = 0.0884 simulation in the B ring with N 3800 particles up to 3200 CPU hours
for the largest simulation with our particle size distribution,
q ¼ 0:45 g cm3 , and s = 2.000 with N 524,000 particles. We note
that 27,000 CPU hours went into the simulations presented here.
3. Qualitative end-state image analysis
At the end of each simulation, an image was created with the
particles to-scale to show the final state of the cell. Each end-state
was placed into a montage, though for readability we have selected
only a few representative ones to illustrate the general trends. We
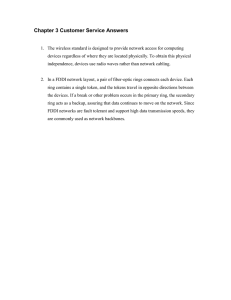
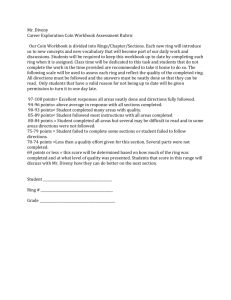
show s P 1:000 for the B ring in Fig. 1, and s P 0:500 for the A ring
in Fig. 2, in multiplicative intervals of 2N/2. We make several observations that have implications for the ring masses.
(1) The A and B rings are significantly different in their mesoscale structure. In the B ring, the self-gravity effects create
long, wake-like structures that form a thick net of clumps
with more transparent gaps in between. In the A ring, the
netting gives way to a less organized structure where we
observe some wake-like behavior that tends to change to
more randomized clumping. These clumps are sometimes
isolated, but they are more often connected by a slightly
over-dense trail of material to a larger clump or wake.
(2) Increasing the internal particle density significantly affects
clumping in the rings, regardless of where the simulation
is in the ring system and regardless of the particle sizes. In
general, besides increasing kcr , it makes the clumps themselves denser. In the B ring, the higher density causes the
clumps to be more efficient at clearing the gaps of particles,
resulting in an overall greater transparency through the cell,
as shown in the two bottom rows of Fig. 1.
(3) Using a size distribution can significantly affect the transparency of the gaps between self-gravity wakes, decreasing it by
adding more small particles. This is most obvious in the
high-q simulations. It has an interesting effect in the lowq A ring simulations shown in the second row of Fig. 2, making the gaps much less transparent but also making the
clumps in the s = 0.707 simulation have a more diffuse edge.
4. Evolution of optical depths
4.1. Definitions
There were three different ‘‘optical depths” that we examined:
dynamical optical depth, projected optical depth, and calculated
optical depth. Dynamical optical depth, s, is determined by summing the area of all particles within the simulation and dividing
by the total area of the cell. This quantity is bound by 0 at the lower
limit of no particles within the cell, and it is unbound at the high
end except by computational resources, [0, 1). Note that it is only
unbound in theory; in practice, the rings must have a finite mass
within a finite volume, and hence this quantity is not unbound in
the real world. This quantity does not change throughout a simulation, and it is used as the horizontal axis in Fig. 3. It is also sometimes referred to as ‘‘classical” or ‘‘geometric optical depth,” and
though it is normally introduced as sdyn, most drop the subscript
and use s as we do.
Transparency, T, is measured by compressing the simulation
cell along the z-axis into a 2D plane and calculating the fraction
of light from a hypothetical star at normal incidence to the ring
that would not be blocked by ring particles. This has values in
the range [0, 1], and it changes throughout the simulation. Note
that 1 sproj = transparency, where sproj is a ‘‘projected optical
depth,” and it is sometimes referred to instead. We use transparency to directly compare our results with Cassini observations in
Section 4.4 in order to constrain ring parameters from our
simulations.
Calculated (sometimes referred to below as ‘‘instrument”) optical depth, scalc, is directly related to T by
scalc ¼ sinðBÞ ln
I0
T b
ð5Þ
where I0 is the unattenuated stellar intensity and b is the background intensity. These were set to 1 and 0, respectively, in our calculations, but they vary in actual Cassini UVIS data. This optical
depth can be directly compared to the ‘‘apparent normal optical
depth” from stellar occultations (Colwell et al., 2006, 2007). The
sin(B) factor is a line-of-sight path-length correction, where B is
the observation angle relative to the ring plane (90° is normal to
the plane). The factor l = sin(B), which converts the calculated optical depth from ‘‘slant” to ‘‘normal,” is not ideally suited for a scenario that includes particle clumping since it assumes a uniform
distribution of particles. However, this is what is generally used in
the literature (e.g., Colwell et al., 2006), and so it was used here
for the sake of comparison. The values of scalc are bound as s is,
[0, 1), though as a practical matter the largest optical depths that
can be measured by UVIS are scalc 5–7. This value is used on the
vertical axis in Fig. 3, which we use to extrapolate the masses of Saturn’s rings.
4.2. Technique
From the simulations, optical depth was determined by first
calculating T for a given set of angles B and /. B is as defined
in Section 4.1. / is also referred to as the ‘‘clock angle,” ‘‘azimuth
angle,” or ‘‘cant angle,” where / = 0 is radially away from Saturn.
Calculating T was done by rotating the simulation cell by B and /.
A circular aperture could then be projected through the simulated
ring section and, if needed, multiple surrounding mirror cells (we
used a radius of 100 m as this is larger than the spot size of an
individual Cassini UVIS measurement). The area within the aperture was divided into a finite grid based upon an integer subdivision of the radius of the smallest particle. All particles’ positions
in the simulation (and any mirrors) were measured relative to
S.J. Robbins et al. / Icarus 206 (2010) 431–445
435
Fig. 1. Montage of simulation cells from the B ring (100 Mm). The top two rows were run with q ¼ 0:45 g cm3 , the bottom two q ¼ 0:85 g cm3 . Odd rows are R ¼ 1 m and
even rows are 0:256 m 6 R 6 2:56 m. Scale is 500 m on each side of each cell, and Saturn is to the right and orbital direction is down.
the aperture in the center of the cell; if they were within the
aperture, then the corresponding grid cells they covered were
filled if they had not yet been covered by another particle. The
number of cells still empty at the end was divided by the total
number in the aperture to yield T. After this was determined, scalc
was calculated from Eq. (5).
Our method is limited by three factors. First, it is limited by the
resolution of the grid and overestimates T because of the square discretization of circular particles in a circular aperture. Experiments
were conducted with grid resolutions of 1/4, 1/8, and 1/16 the radius of the smallest particle, and the final scalc only differed by
0.1%. This amount was deemed acceptable because it is less than
the difference of using a different timestep of the simulation (different timesteps are addressed in Sections 4.3 and 4.4). The second
limitation is computer speed. Simulated observation angles close
to normal to the ring plane were fairly fast because no mirrors need
to be searched – these took on the order of 100 ms. However, more
complicated simulations with 100,000 particles at a very low B
angle (such as 2°) along the diagonal of the cell (/ = 45°) could take
several minutes to complete. On average, for a single simulation
timestep analyzed for a 2° 2° grid of B and / angles, this code required 6–36 h to run with a median time of 12 h.
Lastly, as alluded to in the second limitation, we cannot calculate the optical depth at very small B angles because the grazing
436
S.J. Robbins et al. / Icarus 206 (2010) 431–445
Fig. 2. Montage of simulation cells from the A ring (130 Mm). The top two rows were run with q ¼ 0:45 g cm3 , the bottom two q ¼ 0:85 g cm3 . Odd rows are R ¼ 1 m and
even rows are 0:256 m 6 R 6 2:56 m. Scale is 500 m on each side of each cell, and Saturn is to the right and orbital direction is down.
incidence angle to the ring plane requires a very large number of
mirror cells. The simulations with high surface densities would
also sometimes completely fill all grid cells, resulting in a ‘‘saturated” grid and scalc = 1. Since the Cassini UVIS measurement of
the ring’s optical depth are generally limited to B > 2.5°, this limitation did not affect our comparison with observations. Despite
these limitations, our method is sufficient for our purposes because
we are mainly interested in comparing our simulations with stellar
occultations observed by Cassini, where the star is sufficiently
bright and the ring particles sufficiently dark in the UV that the observed signal is mostly due to direct transmission through the rings
as opposed to scattering and/or reflection (Colwell et al., 2006).
4.3. Results observing normal to the ring plane
Once self-gravity wake structures form in the simulations, scalc
could change by up to a factor of 2 depending upon the intra-wake
particle density and the size of the wakes relative to our chosen aperture (100 m in radius). In order to calculate a scalc normal to the ring
plane (scalc\) that is representative of the simulations, we averaged
the scalc\ results for 200 different time steps, spaced 10 steps apart
(each step being 1/1000th orbit), covering the last two simulated
orbits. This averaging captures the effect of the spatial averaging in
the UVIS stellar occultation data used to reduce the effect of stochastic variations (noise) in the observations. The observed and
S.J. Robbins et al. / Icarus 206 (2010) 431–445
437
Fig. 3. scalc\ for the last two full orbits of each simulation, averaged over 200 time steps with the error bars indicating the variance. Top frame is the B ring, bottom frame is
the A ring. The dotted diagonal line in both images is a 1:1 reference correlation. The q ¼ 0:65 g cm3 data fell directly between the other two particle densities, so it has been
removed from the graphs to aid readability.
simulated optical depths are thus a function of viewing geometry
and not on the particular configuration of self-gravity wakes within
a single UVIS footprint nor single simulation time step. The resulting
calc? are shown for all simulations, grouped by rings (B and
values of s
calc? over
A), in Fig. 3. We also calculated the standard deviation of s
the measured timesteps, which are shown as error bars. We make
the following observations from these data:
(1) Once scalc\ and s are no longer linearly related – a point which
is tightly correlated with the onset of self-gravity wake/clump
formation – our simulations show monotonic behavior in gencalc? levels off to a near-constant
eral in the B ring, where s
value. However, this is not the case for the q ¼ 0:45 g cm2 ,
calc? starts to level off but then
R ¼ 1 m simulations, where s
begins to increase again, at least as far in s as we have been
able to simulate. We expect the other parameter sets to
calc? again, but we have no way of estimating at
increase in s
what s that will occur without actually conducting the simulations. This has significant implications on the overall mass of
the B ring because Cassini UVIS has observed scalc\ > 7 for portions of that ring (see Fig. 4). Previous estimates for the mass of
the B ring (e.g., Esposito et al., 1983) have assumed a linear
relationship between s and scalc\, which our results show
may significantly under-estimate the mass of the B ring.
(2) A linear relation between the calculated optical depth and the
dynamical optical depth in the B ring exists over a much larger
range of s for the lowest particle density simulations. The
effects of introducing a particle size distribution do not
correspond to a predictable behavior of where, as a function
of s, the linear behavior will end. For q ¼ 0:45 g cm2 , the
size-distribution simulation deviates at s 0.9 ðr 55gcm2 ),
while the R¼1m simulations do not deviate until s 1.1
(r 65 g cm2 ). For q ¼0:85gcm2 , the behavior is the
opposite, where linear behavior persists up to s 0.5
(r 55 g cm2 ) for the size distribution, but only up to
s 0.4 (r 45gcm2 ) for the single-sized particles. For
q ¼0:65gcm2 , the behavior is similar as for the higher density,
but the deviation occurs at a slightly larger s. A possible explanation of the switch in behavior could be due to the relative
importance of gravitational scatter versus collisions and the
ease with which gravitational aggregates form as a result. In
the higher density particle simulations, the higher masses of
the wakes may increase the velocity dispersion of the smaller
particles by gravitational scattering and the higher mass small
particles may scatter each other more effectively.
(3) Linear behavior in the A ring follows the same general pattern observed in the B ring in that the higher the internal
calc? remains similar
particle density, the range over which s
to s is shorter. However, in the A ring, more predictable
behavior is observed in terms of how introducing a particle
size distribution affects this turn-off. Our simulations show
that the linear behavior persists to larger values of s in simulations with a size distribution.
(4) In the A ring, the behavior is more difficult to predict due to
the apparent scatter in Fig. 3, although the simulations
calc? once the linear
do appear to show a leveling off of s
438
S.J. Robbins et al. / Icarus 206 (2010) 431–445
Fig. 4. scalc\ for Saturn’s B ring (top panel) and A ring (bottom panel), from a Cassini UVIS stellar occultation. Note that the scales are different. To estimate the true normal
optical depth we used the data from the ingress occultation of the star b Centauri on Rev 077 (bCen077(1), 2008-202–2008-203). We binned the data to regular 10-km
intervals in ring plane radius and computed the slant-path-corrected optical depth. For b Centauri, l = sin(B) = 0.92, so the effects of self-gravity wakes on the observed optical
depth is small. In the B ring, at measured optical depths of 5 we estimate the uncertainty in s to be ±0.4 where the main sources of the uncertainty are systematic errors in
background and instrument response. The uncertainty in scalc\ increases rapidly with scalc\ and values greater than 7 are indistinguishable from completely opaque in this
occultation.
relationship ceases. All we can say at this point is that, for a s
calc? < s, the observed deviathat is large enough such that s
tions are mirrored for both simulations with and without a
particle size distribution. However, this behavior appears
to be dependent upon q and is not predictable from these
simulations.
4.4. Results at other angles and comparison with Cassini UVIS
occultations
In the previous section, the results were only for observations
normal to the ring plane. This section removes that constraint
and allows us to make direct comparisons with Cassini UVIS stellar
occultations. To-date, these observations have spanned
2.7° < B < 68.2°.
For our simulated scalc, we had six dimensions of parameter
space: (1) distance from Saturn, (2) internal particle density, (3)
particle radius, (4) s, (5) B, and (6) /. In order to cope with the large
space (and the requisite 162 graphs to analyze them, one s(B, /)
per simulation), we plotted the results independent of / and s, creating the 12 graphs shown in Fig. 5 (B ring) and Fig. 6 (A ring). The
data are averaged over the last full orbit of each simulation, with a
resolution of 10° in both B and /; when plotting, the data are
placed regardless of / as well as s, though we colored the results
based on s. In these figures, the horizontal axis is the projection
factor l = |sin(B)|. The vertical axis is transparency, exp (scalc/l),
though it can also be calculated as shown in Section 4.1. Over-plotted are Cassini UVIS data.
The utility of graphing in this manner is that the vertical range
of values varies depending upon the parameters used; it is most
dependent upon distance from Saturn, and within that sub-set,
the particle density and size distribution of particle radii interact
to affect the shape as well. Our transparency plots can therefore
provide reasonable constraints upon q and R based on the overplotted Cassini data.
From Fig. 5, we conclude that, of the six sets of parameters
within the ranges that we studied, the Cassini data best fit the
q ¼ 0:45 g cm3 particle density and the R ¼ 1 m particle radii as
the parameters for the B ring. We acknowledge a monodisperse
particle population is likely an unphysical result and discuss it further in Section 5.4, but it is the best match with our simulations.
From Fig. 6, we conclude that the Cassini data best fit the
q ¼ 0:45 g cm3 particle density with the particle size distribution
as the parameters for the A ring. This value for the particle density
was also found to be the best fit to observations of the azimuthal
brightness asymmetry of the rings (Salo et al., 2004; French
et al., 2007; Porco et al., 2008). We use these to estimate the total
mass of Saturn’s rings.
There are two more constraints that we can apply to the parameters of Saturn’s A ring. First, Tiscareno et al. (2007) show from
439
S.J. Robbins et al. / Icarus 206 (2010) 431–445
calc results for the B ring averaged over 100 time steps (1 full orbit) in 10° by 10° resolution in observation angle B and azimuthal viewing angle /. Data are graphed
Fig. 5. s
independent of / and s (though s is indicated by color). Over-plotted grey symbols are Cassini UVIS data. The top row is q ¼ 0:45 g cm2 , the middle row q ¼ 0:65 g cm2 ,
and the bottom row q ¼ 0:85 g cm2 . The left column is for single-sized particles / (R = 1 m) and the right column is for a size distribution (0:256 m 6 R 6 2:56 m).
wavelet analysis of density waves that the surface density of the A
ring at 130 Mm is r 44 g cm2 (weighted average over the four
closest locations to our 130 Mm position). Our A ring simulation that
most closely matches this, given the Cassini UVIS stellar occultation
constraint above, is s = 0.707 for q ¼ 0:45 g cm3 (r 42:4 g cm2 ).
calc? 0:46 0:04. Using the rectangular
For this s, we calculate s
slab model for self-gravity wakes (Colwell et al., 2006), we can calculate the optical depth that would be observed by an occultation at
normal incidence to the rings from the self-gravity wake properties
that they determined. That gives scalc\ 0.61 for 130 Mm from
Saturn. The measured apparent normal optical depth at this location
is scalc\ = 0.58 in the b Cen (Rev 077 ingress) occultation for
which l = 0.92, and therefore the effects of wakes on measured optical depths are small. Since our simulated size distribution did not
calc?
include particles smaller than 0.256 m, we would expect our s
to be smaller than the value observed in Saturn’s A ring at the fewpercent level (discussed further in Section 5.4).
5. Estimating the mass of the B and A rings
5.1. Methods
Based on the correlations between our simulations and the Cassini science results, we can provide an estimate for the mass of Saturn’s rings by using the simulation parameters that are closest
matches to the data. We provide separate estimates for the A
and B rings. The total ring mass may be measured directly by tracking the Cassini spacecraft for the end-of-mission maneuvers pro-
posed, which will maneuver Cassini between the rings and
Saturn; the mass-resolution of these determinations should be
approximately that of the moon Mimas (3:8 1019 kg) or better
(Seal and Buffington, in preparation). The sum of our values below
(A ring + B ring masses) are our prediction for what Cassini will
measure.
We provide a range of estimates for the masses of the A and B
rings, as well as the B ring core. They are based on the following
equation:
MRing ¼
p a2outer edge a2inner edge
L2
¼ p a2outer edge a2inner edge r
N
X
4
pq R3i
3
i¼1
!
ð6Þ
as a disk with an area defined by
We treat each ring
p a2outer edge a2inner edge . We divide this disk by the area L2 of our
simulation cell (for the simulation that best matches the observed
properties) to calculate the effective number of cells that fit into
the area of the ring. We then multiply this by the total mass of that
simulation cell to get the mass of the ring. Note that this is equivalent to multiplying our derived surface densities by the surface
area of the rings.
We provide two different mass estimates for each ring, and we
provide an additional one for the B ring. Our minimum mass estimate for each ring is based on the closest-match simulation that
we have completed based upon Figs. 5 and 6. This is expected to
grossly under-estimate the mass of the B ring because we have
440
S.J. Robbins et al. / Icarus 206 (2010) 431–445
calc results for the B ring averaged over 100 time steps (1 full orbit) in 10° by 10° resolution in observation angle B and azimuthal viewing angle /. Data are graphed
Fig. 6. s
independent of and s (though s is indicated by color). Over-plotted grey x symbols are Cassini UVIS data. The top row is q ¼ 0:45 g cm2 , the middle row q ¼ 0:65 g cm2 , and
the bottom row q ¼ 0:85 g cm2 . The left column is for single-sized particles (R ¼ 1 m) and the right column is for a size distribution (0:256 m 6 R 6 2:56 m).
not been able to perform simulations that yet match the optical
depths observed there. The second mass estimate assumes that
there is a 1:1 linear relationship between s and scalc\ after our largest completed simulation (for the parameter set that best matches
per Figs. 5 and 6). We use this linear relationship to extrapolate our
scalc\ values to those observed by Cassini (Fig. 4). We assume this
linear relationship with a slope of 1 based upon that correlation at
low-s and because we actually expect the slope to be less, but we
do not know by how much; with a true slope of less than 1, we will
again necessarily under-estimate the mass from this technique,
lending support to our purpose of setting a new, conservative lower limit to the mass of the saturnian ring system. Our third estimate is based on a parameterization of how clumping affects
scalc\ throughout the B ring and it is explained in Section 5.3 where
we discuss our B ring mass estimates. We only use this third estimate for the B ring because the A ring is sufficiently constrained by
the simulations we were able to do as well as by spiral density
waves. Clumping also varies much less throughout the A ring than
the B ring.
We compare our values with optical depth instead of transparency even though transparency is the actual value measured by
both Cassini and our code. The reason is that transparency varies
linearly with the light transmitted through the rings (and with s
until s = 1), but the mass does not – mass varies linearly with optical depth. As we have shown in Fig. 3, scalc\ does not vary linearly
with s. Therefore, while a transparency decrease from 0.95 to 0.98
would result in very little change in our derived mass, the corresponding optical depth increase from 3.0 to 3.9 increases our derived mass significantly.
5.2. The A ring mass estimates
Saturn’s A ring extends over approximately a0 = 122.05–
136.78 Mm (see Fig. 4). Again using the self-gravity wake slab
calc? 0:69 for the A
model of Colwell et al. (2006), we calculate s
ring using the average self-gravity wake parameters (values averaged from Fig. 4). Our simulation that best fits with the Cassini
constraints (Fig. 5) is for the parameters s ¼ 0:707; q ¼ 0:45
g cm3 , and the size range of particles (0:256 m 6 R 6 2:56 m). This
corresponds to an opacity j ¼ 1:1 102 cm2 g1 and a surface
density r ¼ 42 g cm2 .
From this simulation, our first estimate – which is the lowest –
calc? ¼ 0:46
is 5:1 1018 kg. Our second estimate extrapolates our s
calc? 0:69, which would
for this simulation to Cassini’s observed s
require s 0.94 (r ¼ 54 g cm2 ). This value of s results in a mass
of 6:8 1018 kg. Due to the constraints from Tiscareno et al.
(2007), we do not extrapolate to larger optical depths because
the implied surface density becomes several factors larger than
has been derived. Consequently, we estimate the mass of the A ring
to be 14–18% the mass of Mimas. We note that this is fairly close
to previous estimates by other researchers using average surface
density estimates to extrapolate the mass (e.g., Horn and Russell,
1993; Spilker et al., 2004).
5.3. The B ring mass estimates
Saturn’s B ring extends over approximately a0 = 92.00–
117.59 Mm, while the core of the B ring extends over a0 = 98.82–
117.16 Mm (Fig. 4). Over the entire ring, the optical depth observed
441
S.J. Robbins et al. / Icarus 206 (2010) 431–445
calc? 3:1, and the core is at least s
calc? 3:9 (values
is at least s
averaged from Fig. 4). Note that these are minimums because parts
of the ring are so opaque that their optical depth cannot yet be
measured, and as a consequence all of our B ring mass estimates
should be considered as minimum masses. The optically thick regions of the B ring core are currently estimated to have scalc\ > 7.5
(Colwell et al., 2007). Of the q and R parameters we examined,
those that best fit the transparency observed have
q ¼ 0:45 g cm3 and R ¼ 1 m (Fig. 5). Although it is unlikely that
there is a monodisperse population of particles, that is the set of
simulations in this study that best fit the observational data; we
discuss this issue in the next section.
As an absolute lower limit, we can use our s = 4.000 simulation
as a template for the rings, even though it only reached
scalc? ¼ 2:1 0:7 (which has a corresponding opacity of
j ¼ 0:42 102 cm2 g1 and r ¼ 240 g cm2 Þ. Using this procedure for the entire ring, we calculate a minimum mass of
4:0 1019 kg ð110% MMimas Þ. For just the core of the B ring, this
procedure yields 3:0 1019 kg (80% MMimas). Our second estimate
calc? 2:1 (at s = 4.0) and linearly scales it to 3.1 and 3.9,
takes s
requiring s ¼ 5:0 ðr ¼ 300 g cm2 ) and 5.8 ðr ¼ 350 g cm2 ). This
scales our minimum mass estimate to 5:1 1019 kg (140% MMimas)
for the entire ring, and 4:3 1019 kg (120% MMimas) for the B ring
core alone.
Our third mass estimate of the B ring is still a conservative lower estimate, but it is based upon a more complex extrapolation
than the previous two. It is based on the idea of taking into account
the effects of gravitational clumping as one moves away from Saturn through the extent of the B ring, while simultaneously
calc? observations by Cassini that we cannot yet
accounting for s
reach in our simulations. To do this, we need two main equations.
First, our B ring simulations at 100 Mm from Saturn only went
calc? ¼ 2:1 0:7. In order to estimate
up to s = 4.0, which yielded a s
calc? will reach the values actually observed
a likely s at which s
(Fig. 4), we performed a linear fit through 2:378 6 s 6 4:000 (four
data points):
scalc? ða ¼ 100; sÞ ¼ 0:11 þ 0:48s
ð7Þ
The uncertainties on the fit parameters are ±0.84 and ±0.30,
respectively. The fit, along with an example power-law fit overlaid, are shown in Fig. 7 (we did not use the power-law fit due
calc?
to insufficient data to justify it). When we apply this fit, s
calc? = 3.9 at
reaches 3.1 for s ¼ 6:3 ðr ¼ 380 g cm2 Þ, and s
s ¼ 8:0 ðr ¼ 480 g cm2 ). Note that in the rest of the derivation
calc? will be referred to as what Cas(until Eq. (10)), this value of s
obs . We cannot simulate these at present and estisini observes, s
mate they would require a minimum of 40,000 and 130,000 CPU
hours, respectively.
The second equation we need is one that will allow us to paramcalc? relates to s as a function of a (distance from Sateterize how s
urn). To do this, we performed an additional 20 simulations for the
parameters q ¼ 0:45 g cm3 and R ¼ 1 m at 95, 105, 110, and
115 Mm from Saturn for s = 0.707, 1.000, 1.414, and 2.000. A plot
similar to Fig. 3 is shown for these simulations in Fig. 8, illustrating
calc? as
the effects of distance from Saturn on clumping that affect s
a function of s. We fit a power-law slope to the s = 2.0 results:
scalc? ða; s ¼ 2Þ ¼ 0:30 þ 9:3 108 a4:4
ð8Þ
where a is in Mm. The formal uncertainties in the fit parameters are
±3.3, ±4.4 1010, and ±11. While we note that all of these uncertainties are greater than the actual values, we believe the fit is still
reasonable, as shown in Fig. 9. A linear fit has better formal uncertainties in the fit parameters, but it does not follow the data as well
and is less supported by theory.
At this stage, we went through the following steps:
calc? ða; s ¼ 2Þ that will allow us to
(1) We have an expression s
calculate the observed optical depth for s = 2 at any location
a within the B ring.
calc? ða ¼ 100; s ¼ 2Þ is from our simula(2) We know what s
calc? ða ¼
calc? ða; s ¼ 2Þ s
tions. Taking the difference s
100; s ¼ 2Þ will allow us to calculate how much greater or
calc? will be at our arbitrary a for s = 2 than this
smaller s
known simulation.
calc? ða ¼ 100; sÞ that will allow us
(3) We have the expression s
calc? from an input s for the location
to calculate any value s
a = 100 in the rings. We can use this to determine what value
s is needed when given an input scalc? . At this point, we also
obs from Cassini.
calc? is equivalent to a s
note that an input s
(4) Putting steps (2) and (3) together, we have the expression
scalc? ða; s ¼ 2Þ scalc? ða ¼ 100; s ¼ 2Þ þ scalc? ða ¼ 100; sÞ,
which, when we assume the rings can be parameterized by
well-behaved functions such as these, will be equal to
scalc? ða; sÞ at both an arbitrary a and s.
(5) Finally, we can solve the above equation for s, using arbitrary Greek letters for the fit parameters at this stage:
scalc? ða; s ¼ 2Þ scalc? ða ¼ 100; s ¼ 2Þ þ scalc? ða ¼ 100; sÞ
calc? ða; sÞ
¼s
calc? ða ¼ 100; s ¼ 2Þ þ ðf þ nsÞ ¼ s
calc?
calc? ða; s ¼ 2Þ s
)s
scalc?=obs scalc? ða; s ¼ 2Þ þ scalc? ða ¼ 100; s ¼ 2Þ f
)s¼
n
ð9Þ
We integrated Eq. (6) for our monodisperse particle size
R ¼ 1 m after substituting in Eq. (9) for s to derive our third plausible lower bound mass estimate:
Z
4qR amax
obs Þda
a sða; s
3 amin
Z amax
8pqR
sobs scalc? ða; s ¼ 2Þ þ scalc? ða ¼ 100; s ¼ 2Þ f
a
M¼
da
3
n
amin
Z
obs ð0:30 þ 9:3 108 a4:4 Þ þ 1:3 0:11
8pqR amax s
a
da
M¼
3
n
amin
Z
obs 9:3 108 a4:4 þ 1:5
8pqR amax s
M¼
a
da
3
0:48
amin
M ¼ 2p
Fig. 7. This shows the same data as in the top panel of Fig. 3 for the B ring
simulations with parameters q ¼ 0:45 g cm2 and R ¼ 1 m for s > 2.0. Over-plotted
are two best fits – a linear and a power-law. The latter was not used due both to its
near-quantitative similarity with the former, and because there are not enough data
points to justify a power-law fit at this time. Using a linear fit will not affect our goal
of providing a new minimum mass estimate for the ring system, however, because a
linear fit will necessarily under-estimate a power-law fit at large values, as can be
calc? ¼ ð0:11 0:84Þþ
seen towards the right edge of this figure. The fits are s
calc? ¼ ð0:9 2:1Þ þ ð0:06 0:68Þ a2:27:2
.
ð0:48 0:30Þ a0 and s
0
ð10Þ
442
S.J. Robbins et al. / Icarus 206 (2010) 431–445
calc? for the last two full orbits of various simulations averaged over 200 time steps with the error bars indicating the variance. The dashed diagonal line is a 1:1 linear
Fig. 8. s
calc? and s throughout the range of the B ring. Simulations were
reference correlation. This shows our attempt to parameterize how clumping affects the difference between s
conducted in 5 Mm intervals for q ¼ 0:45 g cm2 and R ¼ 1 m. A slight horizontal offset is included in the figure for 95, 105, and 115 Mm symbols to aid readability. A powerlaw was fit through the s = 2 simulations for use in our third minimum mass estimate of the B ring.
calc? versus a0.
Fig. 9. This shows the same data as in Fig. 8, though it is displayed as s
Over-plotted are two best fits – a linear and a power-law. The former was not used,
despite the better formal certainties, while the latter was used in the text due to it
calc? ða0 ;
better representing the data as well as support from theory. The fits are s
s ¼ 2Þ ¼ ð7:1 1:3Þ þ ð0:056 0:013Þ a0 and scalc? ða0 ; s ¼ 2Þ ¼ ð0:3 3:3Þ þ
8
10
.
ð9:3 10 4:4 10 Þ a411
0
Table 1
Summary of different ring mass estimates. Mass is in 1019 kg.
Ring
Estimate 1
Estimate 2
Estimate 3
A
B, core
B, total
0.51
3.0
4.0
0.68
4.3
5.1
–
6.6
7.0
calc? ¼ 3:1; 3:9, we calculate a mass of
Integrating for s
7:0 1019 kg (190% M Mimas ) for the B ring and 6:6 1019 kg (180%
MMimas ) for the B ring core. While these are both larger than the
previous two mass estimates – and larger than has been previously
derived – we still think that this still likely under-estimates the
mass. We address why in Section 5.4 and note that all of the mass
estimates are summarized in Table 1.
5.4. Caveats
There are five primary sources of uncertainty in the above estimates for the mass of the rings. First, while the particle density that
best fits with the Cassini results is q ¼ 0:45 g cm3 , we only
conducted simulations for q ¼ 0:45; 0:65; 0:85 g cm3 . This is a
fairly coarse resolution in density, and we did not go lower than
that value. A better match for the rings could be as high as
q ¼ 0:55 g cm3 , but it could also be lower (though it would be difficult to conceive a realistic material with a density of less than half
that of ice – they would need to be very loosely packed ‘‘snowballs”
despite being subjected to compacting collisional processes over
their long history).
Second, we somewhat arbitrarily chose R ¼ 1 m for the size of
our particles, and then we chose our size range over a factor of
10 in R to yield the same surface density. Altering the range of
sizes to yield a different surface density for a given optical depth
could result in increasing or decreasing the requisite s for a given
scalc? , altering the derived mass. Also, the actual size-frequency of
ring particle radii may not follow a b = 3 power-law. Note, however, that increasing the range of R (while maintaining the previous
surface density) will likely not change the results significantly
more than what we have shown between the single-sized particles
and the 10 size range; it will decrease the transparency slightly
as the gaps become ‘‘dirtier,” but we estimate this effect to be at
calc? from
the few-percent level. This is based on the difference in s
a simulation with or without a particle size distribution (see Fig. 3).
It is also based on constraints of sgap < 0.3 (Nicholson et al., 2008)
(the optical depth of the gaps between the gravitational aggregates), which our simulations have already reached.
Third, we assumed a Bridges et al. (1984) velocity-dependent
coefficient of restitution, e (see Section 2). Other researchers (Salo
et al., 2004; French et al., 2007) often use a single value, such as
e = 0.5. Recently, Porco et al. (2008) argue that the particles are less
elastic than Bridges et al. (1984) inferred, based on fitting their
measurements to the A ring. If e is smaller, then we would expect
the particles to clump more than in our simulations. This additional clumping would act to decrease the scalc\ for a given s,
resulting in an increase in the mass of the rings.
Fourth, we treated the rings as uniform slabs at constant optical depth. As a consequence of this, any differences in clumping
effects on the true optical depth with distance from Saturn were
not taken into account. This is unlikely to significantly affect the
mass estimate in the A ring because this ring has a fairly uniform
optical depth that slowly decreases with increasing distance from
Saturn. Our simulations show that clumping increases with distance from Saturn and lowers scalc\ for a given s, which is consistent with what is observed (Fig. 4). In the B ring, this is not the
case, and the densest parts are 100–102 Mm and 104–
108 Mm, both of which are beyond where we did our primary
simulations in the B ring. Based on increased clumping at larger
S.J. Robbins et al. / Icarus 206 (2010) 431–445
443
a, this fourth limitation is also likely to only increase our mass
estimate for the B ring.
Fifth – and this is more applicable to the B than the A ring – we
do not know if a linear extrapolation from our available
scalc? ða ¼ 100; sÞ data (Fig. 3) is realistic, especially considering
that it is based on only four data points. There are both reasons
to think it is and is not. On the con side, Fig. 3 fairly conclusively
shows that there is not a simple relationship between scalc? and s
once self-gravity wake or clump structures form. Without simulating larger optical depths, we do not know if the trends we see at
lower s will continue. On the pro side, we are in a physical situation where we know that, for some value of s, scalc\ must reach
what we observe in the actual rings. In addition, the largest few
simulations do seem to follow a reasonably linear relationship in
Fig. 3, and we may have reached a regime where the simulations
are now self-similar and will continue to follow that trend. This
is supported by the end-stage simulation cells shown in Fig. 10
where, as the cell size and optical depth increases, the structure remains the same except in scale.
With these limitations in mind, it is difficult to place an uncertainty on our mass of 0:51 1019 kg—0:68 1019 kg for the mass of
the A ring, 3:0 1019 kg—6:6 1019 kg for the minimum mass of
the B ring’s core, and 4:0 1019 kg 7:0 1019 kg for the minimum mass of the entire B ring. We roughly estimate that the first
and second issues noted above will likely play only minor roles in
shifting these to larger or smaller masses. Based on sgap constraints
that are no more than 20% larger than our simulation results, adding more smaller particles will not increase scalc? enough to account for Cassini observations at currently simulated values of s.
The third point will likely increase the masses of both rings. The
fourth is likely to not change the A ring mass estimate by any significant amount. It should, however, increase the B ring estimate
but we do not know by how much without doing an actual
point-by-point integration with our extrapolated fits compared
to the Cassini results; going through that process is unwarranted
due to the large uncertainties in our fits at this time. The fifth issue
could significantly alter the B ring’s mass, but we do not know if it
will alter it to be larger or smaller.
Finally, we have neglected the mass of the Cassini Division and
the C ring here. Colwell et al. (2009) estimate the Cassini Division
mass to be 1:4 1017 kg. Using their measured Cassini Division
opacity of 0:1 cm2 g1 and applying it to the C ring gives a C ring
mass of 1017 kg. Even if the opacity of the C ring is as high as it
is in the A ring, both of these ring regions are likely negligible in
terms of the total ring mass, and the factors we note above likely
play a much larger role than this.
6. Conclusions and discussion
We have explored a large simulation parameter space of possible particle densities, size distributions, and optical depths for Saturn’s rings and constrained them to likely values based on
comparison with Cassini UVIS stellar occultations. By extrapolating
our simulation results to the larger optical depths measured in the
core of the B ring, we have demonstrated that the mass of Saturn’s
rings is likely to be larger than has been previously estimated by at
least a factor of 2. While this initial parameter space provides an
important constraint, there is still a large amount of unexplored
parameter space, specifically narrowing down the internal particle
density, trying different size distribution ranges, and varying the
coefficient of restitution (this last one we did not vary at all). Internal particle densities substantially smaller than 0:45 g cm3 appear
to be unlikely, however, since such low particle densities would be
difficult to match both the surfaces densities measured by density
waves and the observed optical depths and photometric properties
Fig. 10. Montage of the four s > 2.0 simulations in the B ring (q = 0.45 g cm3,
R ¼ 1 m). Scale is 600 m on each side of each cell shown. Saturn is to the right, and
orbital motion is down. This montage illustrates the developing self-similar
gravitational aggregate structure at large optical depths. While the optical depth
increases, the scale of the structures increase, but the types of structure generally
stays the same, which is why we think it is plausible to extrapolate to higher optical
depths.
444
S.J. Robbins et al. / Icarus 206 (2010) 431–445
in the A ring (Porco et al., 2008). It is also necessary to conduct simulations throughout the B ring at s > 4:0 ðr > 240 g cm2 Þ until
the scalc? from the simulations reach what is observed by Cassini;
unfortunately, these are very CPU-intensive due to the requisite
particle number and were not done for this study.
Extending the particle size distribution down to centimetersized particles could potentially yield larger optical depths in the
B ring with a smaller total mass, but our simulations using a truncated size distribution show that most of the smaller particles reside on opaque clumps in the B ring rather than fill the gaps
between these clumps. Cassini UVIS and VIMS observations of stellar occulations for a range of ring opening angles are best explained
by gap optical depths of less than 0.3 throughout the A and B rings,
which also implies that most of the smaller particles reside on opaque clumps (Colwell et al., 2007; Nicholson et al., 2008). The optical depths measured in the dense B ring core are therefore likely to
be primarily due to the fractional area covered by opaque clumps
of particles and adding more small particles will not likely alter
this fractional area by more than a few tens of percent. While this
may seem like a large amount, the actual area covered by these
gaps is fairly small at s > 4.0 (Fig. 10) and so we do not expect this
to be a significant effect, especially when compared with the caveats mentioned above that would act to increase our minimum
mass estimate.
Porco et al. (2008) argue that the particle collisions are more
dissipative than we have assumed in our simulations, but more
dissipative collisions will most likely cause the smaller particles
to have smaller random velocities and to spend more time stuck
on larger clumps of particles where they reside inside the Hill
sphere of the larger particles or clumps of particles. This latter possibility may even explain why our B ring simulation using a single
particle size was a better fit to the UVIS stellar occultation data
than was our simulation using a particle size distribution with relatively elastic particle collisions: if small particles really spend
most of their time in opaque clumps, they would not contribute
to the observed transparency of the B ring. Since the tendency
for particles to clump increases as we move farther from Saturn,
and since all of our s > 2 B ring simulations were done at an orbital
radius of 100 Mm near the inner edge of the B ring core, we have
most likely underestimated the degree of particle clumping in
most of the B ring core and therefore have systematically underestimated its mass. We have attempted to account for this variation
in clumping across the B ring core by including a dependence from
Saturn extrapolated from our s = 2 simulations. If all these considerations are additive, they have the potential to increase our mass
estimate by at least a factor of 2.
A larger ring mass could make it less probable for the rings to be
a young system (i.e., less than 109 years), partially due to the
unlikelihood of such a massive moon breaking up in recent Solar
System history. If the rings are debris from the disruption of a progenitor satellite, then a mass several times that of Mimas may be
consistent with the disruption of the moon occurring during the
late heavy bombardment (Charnoz et al., 2009). This scenario requires the progenitor satellite to have migrated from the protosatellite disk inward to an orbital radius just outside of the orbit that
is synchronous with Saturn’s rotation rate at 1.86 Saturn radii so
that subsequent tidal evolution of the satellite’s orbit would not
cause the satellite to spiral into the planet before the late heavy
bombardment event some 700 Myr after the formation of Saturn.
An attractive feature of this scenario is that the massive core of
the B ring straddles the synchronous orbital radius just as we
would expect if it spread inward and outward from a collisionally
disrupted satellite.
Perhaps the greatest single observational difficulty with the age
of Saturn’s rings comes from the apparent lack of meteoroidal contaminants to their predominantly water–ice composition (Cuzzi
and Estrada, 1998; Poulet et al., 2003; Nicholson et al., 2005). It
is also possible that the less massive A ring was added later by
the tidal disruption of an ice-rich centaur (Dones et al., 2007). Such
tidal disruption events preferentially capture the ice-rich mantle of
a differentiated object, so a younger, less contaminated A ring may
be easier to explain than an older, uncontaminated B ring core. In
principle, increasing the mass of the B ring provides a greater volume of icy ring material in which dark contaminants can be hidden, preserving the bright surfaces of the ring particles (Esposito
et al., 2008). Esposito et al. (2008) show that a ring 10 more massive would have proportionally less meteoritic pollution, and thus
have no discernable spectral features from carbon in its UV spectrum. This suggests that dark contaminants can be hidden in a
more massive ring, and so arguments for a young age from a lack
of dark contaminants are less tenable.
Acknowledgments
This research has greatly benefited from numerous discussions
with Larry Esposito. We would also like to thank our reviewers D.
Richardson and M. Tiscareno whose comments increased the quality of this paper. S.J. Robbins and M. Sremčević were partially supported by NASA through the Cassini project at JPL. J.E. Colwell was
supported by the NASA Cassini Data Analysis Program Grant Number NNX08AQ73G. G.R. Stewart and M.C. Lewis were supported by
the NASA Planetary Geology and Geophysics program Grant Number NNG06GG46G.
References
Barnes, J., Hut, P., 1986. A hierarchical OðN logðNÞÞ force-calculation algorithm.
Nature 324, 446–450.
Bentley, J.L., 1975. Multidimensional bilinear search trees used for associative
searching. Commun. ACM 18, 509–517.
Bridges, F.G., Hatzes, A., Lin, D.N.C., 1984. Structure, stability, and evolution of
Saturn’s rings. Nature 309, 333–335.
Charnoz, S., Morbidelli, A., Dones, L., Salmon, J., 2009. Did Saturn’s rings form during
the late heavy bombardment? Icarus 199, 413–428.
Colwell, J.E., Esposito, LW., Sremčević, M., 2006. Self-gravity wakes in Saturn’s A ring
measured by stellar occultations from Cassini. GRL 33, L07201. doi:10.1029/
2005GL025163.
Colwell, J.E., Esposito, L.W., Sremčević, M., Stewart, G.R., McClintock, W.E., 2007.
Self-gravity wakes and radial structure of Saturn’s B ring. Icarus 190, 127–144.
doi:10.1016/j.icarus.2007/03/018.
Colwell, J.E., Cooney, J.H., Esposito, L.W., Sremčević, M., 2009. Density waves in
Cassini UVIS stellar occultations. 1. The Cassini Division. Icarus 200, 574–580.
doi:10.1016/j.icarus.2008.12.031.
Cuzzi, J.N., Estrada, P.R., 1998. Compositional evolution of Saturn’s rings due to
meteoroid bombardment. Icarus 132, 1–35.
Dones, L., Agnor, C.B., Asphaug, E., 2007. Formation of Saturn’s rings by tidal
disruption of a centaur. DPS Meeting 39, #7.07.
Esposito, L.W., Ocallaghan, M., West, R.A., 1983. The structure of Saturn’s rings –
Implications from the Voyager stellar occultations. Icarus 56, 439–452.
Esposito, L.W., Elliot, J.P., Albers, N., 2008. Regolith growth and darkening of Saturn’s
ring particles. AGU Meeting, A1295.
French, R.G., Nicholson, P.D., 2000. Saturn’s ring’s. II. Particle sizes inferred from
stellar occultation data. Icarus 145, 502–523.
French, R.G., Salo, H., McGhee, C.A., Dones, L., 2007. HST observations of azimuthal
asymmetry in Saturn’s rings. Icarus 189, 493–522.
Hedman, M.M., Nicholson, P.D., Salo, H., Wallis, B.D., Buratti, B.J., Bains, K.H., Brown,
R.H., Clark, R.N., 2007. Self-gravity wake structures in Saturn’s A ring revealed
by Cassini-VIMS. Astron. J. 133 (6), 2624–2629.
Hockney, R.W., Goel, S.P., Eastwood, J.W., 1974. Quiet high-resolution computer
models of a plasma. J. Comput. Phys. 14, 148–158.
Horn, L.J., Russell, C.T., 1993. Mass of Saturn’s A Ring. LPSC Proceedings XXIV, 671–
672.
Julian, W.H., Toomre, A., 1966. Non-axisymmetric responses of differentially
rotating disks of stars. Astrophys. J. 146, 810–830.
Lewis, M.C., Stewart, G.R., 2008. Features around embedded moonlets in Saturn’s
rings: The role of self-gravity and particle size distributions. Icarus 199, 387–
412.
Nicholson, P.D., French, R.G., Campbell, D.B., Margot, J.-L., Nolan, M.C., Black, G.J.,
Salo, H.J., 2005. Radar imaging of Saturn’s rings. Icarus 177, 32–62.
Nicholson, P.D., Hedman, M.M., Salo, H.J., and the Cassini VIMS Team, 2008. CassiniVIMS observations of self-gravity wakes in Saturn’s rings – II. AAS DDA Meeting
#39, #18.01.
S.J. Robbins et al. / Icarus 206 (2010) 431–445
Porco, C.C., Thomas, P.C., Weiss, J.W., Richardson, D.C., 2007. Saturn’s small inner
satellites: Clues to their origins. Science 318, 1602–1607.
Porco, C.C., Weiss, J.W., Richardson, D.C., Dones, L., Quinn, T., Throop, H., 2008.
Simulations of the dynamical and light-scattering behavior of Saturn’s rings
and the derivation of ring particle and disk properties. Astron. J. 136, 2172–
2200.
Poulet, F., Cruikshank, D.P., Cuzzi, J.N., Roush, T.L., French, R.G., 2003. Composition of
Saturn’s rings A, B, and C from high resolution near-infrared spectroscopic
observations. Astron. Astrophys. 412, 305–316.
Renner, S., Sicardy, B., French, R.G., 2005. Prometheus and Pandora: Masses and
orbital positions during the Cassini tour. Icarus 174, 230–240.
Salo, H., 1992. Gravitational wakes in Saturn’s rings. Nature 359, 619–621.
Salo, H., 1995. Simulations of dense planetary rings. III. Self-gravitating identical
particles. Icarus 117, 287–312.
445
Salo, H., Karjalainen, R., French, R.G., 2004. Photometric modeling of Saturn’s rings.
II. Azimuthal asymmetry in reflected and transmitted light. Icarus 170, 70–90.
Spilker, L.J., Pilorz, S., Lane, A.L., Nelson, R.M., Pollard, B., Russell, C.T., 2004. Saturn A
ring surface mass densities from spiral density wave dispersion behavior. Icarus
171, 372–390.
Stewart, G.R., 1991. Nonlinear satellite wakes in planetary rings. Icarus 94, 436–
450.
Tiscareno, M.S., Burns, J.A., Nicholson, P.D., Hedman, M.M., Porco, C.C., 2007. Cassini
imaging of Saturn’s rings. II. A wavelet technique for analysis of density waves
and other radial structure in the rings. Icarus 189, 14–34.
Toomre, A., 1964. On the gravitational stability of a disk of stars. Astrophys. J. 139,
1217–1238.
Wisdom, J., Tremaine, S., 1988. Local simulations of planetary rings. Astron. J. 95,
925–940.