Document 12561025
advertisement

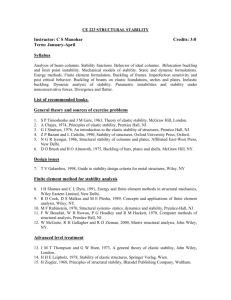
Fourth International Conference on FRP Composites in Civil Engineering (CICE2008) 22-24 July 2008, Zurich, Switzerland Paper 6.D.1 CD-ROM (ISBN 978-3-905594-50-8) Stability Analysis for Pitched Portal Frames of Fibre Reinforced Polymer J.T. Mottram School of Engineering, University of Warwick, Coventry, UK ABSTRACT: In this paper the analysis method from Majid (1963) for steel pitched portal frames is progressed so that we can study the influence of shearing action on the overall elastic critical buckling load when members are of Fibre Reinforced Polymer (FRP) material. For solid members of FRP the ratio of the longitudinal Young’s modulus to the shear modulus of elasticity can be significantly higher than for the equivalent sized isotropic members, and so the influence of shear deformability on the buckling resistance is required. Shear-flexibility can also be introduced into skeleton frames by having FRP members that are of braced-batten or of sandwich construction. In the approach developed by Majid the buckling problem is modelled using stability functions that account for the reduced stiffness in beam-column members as deformation increases. To apply the closed-form expressions to frames with shear-flexible members requires the replacement of the shear-stiff stability functions with the shear-flexible equivalents. One set of expressions is from Mottram and Aberle (2002), after they observed an end rotational compatibility issue in the theoretical derivation to the conventional set of shear-flexible stability functions (see Al-Sarraf 1986). To show the influence of shear-flexibility, and the choice of functions, analytical results for the critical load (for symmetrical and anti-symmetrical modes) are reported for two loading cases. A brief discussion is given on how these results impinge on our fundamental understanding of the instability resistance of pitched FRP portals in the presence of shear-flexibility. It is observed that further work is required to find out if the critical load is to be determined by analysis using the 2002 set of shear-flexible stability functions. 1 INTRODUCTION The static and buckling analysis of skeleton frame structures has been the subject of much effort, and during the 1950s and 60s attention was focused on steel frames with the inclusion of geometric non-linearity by way of shear-stiff stability functions (Majid 1963; Majid 1972). Their best-known forms are the Livesley φ functions (Livesley & Chandler 1956). For practical use the mathematical definitions to the five φ−functions and the five matrix displacement functions (s, c, m, n, and o) are given in Appendix A to the paper by Mottram and Aberle (2002). According to Horne and Merchant (1956) the most severe limitation known when using the shear-stiff functions is that the overall frame deformation has to be of an order comparable with the dimensions of the structure; that is the relative member end rotation must be < 15o. Since this is not a significant constraint, the functions have found widespread application in the structural analysis of steel frames (see Majid 1963; Majid 1972), where shear-flexibility is neglected. As discussed by Mottram and Aberle (2002) there are several classes of structures where the shear-stiff assumption is no longer valid, and so for these the analysis for overall elastic instability resistance must include member shear-flexibility. One practical class is steel structures with batten-braced members; Eurocode 3 (2005) has clauses in Section 6.4 for “Uniform Built-up Compression Members”, which involve shear deformation. A second class of structures is dou- -1- ble-layered grid-shells, which can also be of steel. Of relevance to the proceedings of this conference is a third class of structures that are constructed of members of Fibre Reinforced Polymer (FRP) material. Bank (2006) gives reasons for, and of applications of, such FRP members in frame construction. FRP members, which can be solid, or of batten-braced or sandwich construction, are shear-flexible be virtue of their higher ratios of longitudinal Young’s modulus to shear modulus. This elastic ratio is 2.6 for a solid member of steel, with practical values for solid FRP members in the range 6 to 200. The lower values are for glass fibre members, such as with pultruded FRPs (Mottram & Aberle 2002; Bank 2006), and the highest are when the unidirectional fibre reinforcement is of highest modulus carbon. Still higher member shear-flexibility can be achieved by using FRP in batten-braced and sandwich member constructions. The theoretical approach presented is valid for all forms of FRP frames having shear flexible members. To enable a structural analysis format, originally formulated by Majid (1972) for frames with isotropic (often steel) members, to be valid for the shear-flexible classes of FRP structures it is necessary only to replace the shear-stiff stability functions with functions that are for shearflexible members (Mottram & Aberle 2002), and these functions will be presented later. A second difference between the behaviour of frames of steel and those of FRP is that the latter do not provide any plasticity, as “yielding” of FRP is often coincident with rupture (Bank 2006). As a consequence of this physical behaviour the structural analysis of shear-flexible frames of FRP can be linear elastic [Abbaker 2006]. It is to be noted that the analytical approaches are limited to members that are without geometric imperfections. The buckling analyses have also been carried out with no imperfections to the overall frame geometry. Presented later are numerical results for the elastic critical buckling loads of continuous portal frame problems, to provide new knowledge and understanding. The word “continuous” defines the frames as depending for their stability on the stiffness of the joints, and not on triangulation. The pitch portal frame problem has joints at the apex and haunches that are assumed to be rigid. To remove the need to give particular frame dimensions and elastic constants the critical loads are presented using a non-dimensional format. 2 STABILITY FUNCTIONS AND CRITICAL BUCKLING LOAD In earlier publications (Abbaker & Mottram 2004; Abbaker 2006; Mottram 2007) computational results for critical buckling loads have been presented for portal frame problems obtained using a matrix structural code specifically written for shear-flexible structures. This analysis tool includes the non-linearities due to second-order P-Δ effects and semi-rigid joint action (by allowing a piecewise non-linear M-φ curve for connection deformation). Material nonlinearity is not included since FRPs are linear elastic to material rupture. Should a frame (usually unbraced) be classified as ‘sway-sensitive’ then geometric nonlinearity becomes significant and a second-order analysis is necessary to take account of the additional bending moments induced as a result of frame deformation and axial compressive forces. Second-order effects are introduced into the matrix analysis by using the stability function approach (Majid 1972; Mottram & Aberle 2002). It was Abbaker (2006) who furthered the original static analysis code so that a characteristic equation method is used to determine a frame’s overall elastic critical buckling load. Details of the analysis and illustrate examples for portal and multi-storey frames with horizontal beam members are given in his PhD thesis. In the coding there are three different sets of stability functions, which will be presented here through the stiffness and carry-over functions s and c. Since the code calculates the functions using the computing formulae by Livesley and Chandler (1956), the shear-stiff functions will be given in terms of φ1 and the non-dimensional load parameter α ( = π / 2 ρ ), noting that φ1 = α cotα and ρ = 4α 2 / π 2 = P / PE . P is the axial compressive force in a member, and PE is the Euler critical buckling load for this member, when it is a concentrically loaded shear-stiff column having pinned ends. The shear-stiff functions can be expressed by -2- s= α 2 + φ1 (1 − φ1 ) α 2 − φ (1 − φ1 ) . and c = 2 1 (1 − φ1 ) α + φ1 (1 − φ1 ) (1) It is observed that the values of the shear-stiff functions in Eqs. (1) are independent of the geometry and elastic constants of the members that combine to give a constant PE. To write out the equivalent shear-flexible functions we have to modify φ1 and α. We also have to introduce the shear-flexibility parameter. It is defined by 2 2 u = βPE / GA = (βπ EI ) / (l GA) , where, for the beam-column member of length l, EI is the flexural rigidity, GA is the shear rigidity and β is the shear correction factor. Because this parameter is in the expressions for the shear-flexible functions their values are dependent on both the geometry and elastic constants of the members; they are not necessarily constants for a specific compression force (the ρ-value). To denote the presence of shear-flexibility there is a bar over the notation used for the equivalent shear-stiff parameter. Non-dimensional load parameter α is now α = π / 2 ρ , where ρ = ρ / (1 − uρ ) , and φ1 is now φ1 = α cotα . Before writing out the shear-flexibility functions, it is observed that the value of φ1 can be calculated using the shear-stiff formulae from Livesley and Chandler (1956), simply by replacing the numerical value for ρ with the shear-flexible value, given by ρ . This step in the computational process is straightforward. Given independently by Al-Sarraf (1986), and later by others, the conventional shear-flexible functions can be expressed in terms of the variables as s= (1 − uρ )α 2 + φ1 (1 − (1 − uρ )φ1 ) and (1 − (1 − uρ )φ1 ) c= (1 − uρ )α 2 − φ1 (1 − (1 − uρ )φ1 ) . (1 − uρ )α 2 + φ 1(1 − (1 − uρ )φ1 ) (2) Mottram and Aberle (2002) observed that in the formulation of Eqs. (2) the end-rotation in the member was not equal to its structurally relevant rotation (due to the moment). This is because of the additional end-rotation (in the opposite rotational direction to that due to a positive end-moment), from the Timoshenko shear deformation when the shearing force is positive. They identified that this incompatibility issue would give a lack of rotational compatibility at joints, where several members meet and one or more of these members have unequal end moments and an axial compression force. New shear-flexible stability functions were derived, such that the member’s end rotations are forced to be the same as the structurally relevant rotations, and the compatibility condition is satisfied. To distinguish these functions from those given by Eqs. (2) the subscript ‘zero’ is used to give due reference to the end slope condition imposed in their formulation. The Mottram and Aberle (2002) shear-flexible functions can be written as s zero = (1 − uρ )(α 2 + φ1 (1 − φ1 )) (1 − φ ) and czero = 1 α 2 − φ1 (1 − φ1 ) . α 2 + φ1 (1 − φ1 ) (3) When running the in-house instability programme (Abbaker 2006) the analyst chooses one of the three sets of stability functions for the determination of the buckling load, and to assign the require level of member shear flexibility parameter u is changed, by way of its elastic constant ratio E/G. A portal frame problem presented by Mottram (2007) showed by how much the critical load changes, for the anti-symmetrical mode, when the shear-flexible functions used are either from Eqs. (2) or Eqs. (3). In the 2007 paper it is wrongly stated that the buckling mode is that for the symmetrical mode. Details to this pitch portal problem are now summarized as it is reanalyzed using the Majid theoretical method (Majid 1963). As Figure 1(a) shows the frame has sloping rafters and pinned bases at joints A and E. It is assumed that joints at B to D are fully rigid. Members AB and DE are identical stanchions and members BC and DC are identical rafters. Members are adequately restrained against member global and local buckling such that failure is by overall in-plane frame instability. With the buckling load not sensitive to the angle of the slope we consider the frame geometry given by the ratios L/h = 4.28 and r/L = 0.0868 (i.e. for a slope of 10o). -3- r h Slopetorafter B Stanchion 1.50 Ir Rafter D Is E A normalised buckling load C L 1.25 1.00 0.75 0.50 0.0 0.5 1.0 1.5 u shear flexibility parameter (a) (b) Figure 1. Continuous portal frame problem and normalised overall buckling load (Wcr/Wcr(u=0)) with increasing shear-flexibility, which is for Example 2 in Mottram (2007). The second moment of areas of the stanchions (Is) and rafters (Ir) have the ratio Is/Ir = 1.128, and loading is a constant vertical uniformly distributed load (udl) on rafters BC and DC. There is no horizontal loading. The value of u is the same for the four members in the frame. In Figure 1(b) the normalised load equal to 1.0 (i.e. Wcr(u=0)) is the buckling load when the four members are shear-stiff, and u is zero. As u increases, the normalised buckling load (Wcr/Wcr(u=0)) given by the solid-line curve is obtained using the conventional shear-flexible functions (Eqs. (2)), and the dashed-line curve is calculated using the Mottram and Aberle shear-flexible functions (Eqs. (3)). Following current wisdom, for a continuous reduction in the buckling load with increasing shear-flexibility, are the results when functions s zero and czero (Eqs. (3)) are chosen. The initial increase in instability resistance for functions s and c (Eqs. (2)) is a very unexpected finding, and justification for the fundamental mechanics study reported herein. The question addressed is whether the compatibility issue in the formulation of the conventional shear-flexible functions is why we obtain the uncharacteristic curve, shown in Figure 1(b). It is noteworthy that when the slope angle to the rafters is zero (horizontal beam), both sets of shear-flexible stability functions give the expected continuous reduction in critical load with increasing u (Abbaker 2006). 3 MAIJD’S APPROACH FOR CRITICAL BUCKLING LOADING The formulation of the closed-formed expressions for the elastic structural analysis by Majid is given in detail in his 1963 PhD thesis. His analytical modelling covers the pitched portal frame problem introduced in Section 2, with and without a pinned based at joints A and E, and a second loading situation of a vertical point load at the apex (this is point C in Figure 1(a)). The solution expressions for the determination of the critical buckling load, in terms of the shear-stiff stability functions (Eqs. (1)), are given for elastic instability with both the anti-symmetrical and symmetrical mode shapes. Majid (1963) obtained the expressions using joint equilibrium equations and a virtual energy approach that applied, at joints B and D, the relevant set of “fictitious” horizontal forces to perturb the specific mode shape. Later, Majid (1972) wrote a book that gives more information on the methodology to the buckling analysis of shear-stiff frame structures. A factor in the modelling decision-making that can change the computed critical load is how we establish the “constant” compression force in the rafters. Majid was applying the approach to study steel structures that could fail with plastic hinge formation. He therefore chooses to establish an expression for the rafter force using rigid-plastic analysis. Because FRP frames are always elastic in behaviour, the author has replaced the Majid rafter force expressions with elastic equivalents, derived by Kleinlogel (1958). Because the rafter force values might be different, the results in Figure 2(a) cannot be directly compared with those in Figure 1(b). Another difference in the Majid approach is that his solutions are only valid when the stanchion and rafter members have the same second moments of areas (i.e. Is = Ir). The author -4- removed this limitation by modifying the rafter load expression. Because of the limit on space herein, only the closed-form expression for the Example 2 problem (Mottram 2007) that buckles with the anti-symmetrical mode is given next. The elastic critical load is obtained when the following (shear-stiff) expression is satisfied (with the c and s functions from Eqs. (1), (2) or (3)), 0 = 2(1 − φ1,s ) − 2 cosθ s r (1 − cr2 ) (1 − cs ) q ss (1 − cs2 ) + 2cosθ s r (1 − cr2 ) (4) θ is the angle of slope for the rafters and q = L/h (see frame geometry in Figure 1(a)). In Eq. (4) the subscripts ‘s’ and ‘r’ to the Livesley function φ1 and the stability functions c and s are for the stanchion and rafter members, respectively. For the udl loading situation the “elastic” constant forces in the members in terms of the total critical load Wcr are defined by ⎤ ⎞⎛ L ⎞ ⎡ q (3 + 5(1 + k ))cosθ ⎟⎟⎜⎜ ⎟⎟ ⎢ + sinθ ⎥ , 2 ⎠⎝ 2cosθ h ⎠ ⎣ 8 (I r 2cosθ h ) / (I s L ) + 1 + (1 + k ) + (1 + k ) ⎦ with k = r/h. Similar expressions are obtained for the symmetrical mode of failure and for the boundary conditions of a fixed base and/or of a vertical point load at apex C. It is a simply task to use an EXEL spreadsheet to calculate the right-hand side of Eq. (4) for changing ρs, and thereby establish, for different u values, the elastic critical buckling load (Wcr) when this calculation is exactly equal to zero. Figures 2 and 3 are plots, using the same format as in Figure 1(b), to show how the normalized critical load of the pitched portal frame changes with increase of the shear-flexibility parameter u. Solid curves are for the stability functions to Eqs. (2), and the dashed curves are when the functions are given by Eqs. (3). 2 ρ ⎛I W ρ s = cr and ρ r = s ⎜⎜ s 2PE,s 2 ⎝ Ir ( ) 1.25 normalised critical load normalised critical load 1.50 1.25 1.00 0.75 0.50 0.25 1.00 0.75 0.50 0.25 0 0.5 1 1.5 0 u shear-flexibility parameter 0.5 1 1.5 u shear-flexibility parameter (a) anti-symmetrical mode (b) symmetrical mode Figure 2. Normalised critical buckling load (Wcr/Wcr(u=0)) with increasing shear-flexibility for Example 2 pitched portal frame with udl on rafters using the Majid (1963) method of analysis. 1.25 normalised critical load normalised critical load 1.50 1.25 1.00 0.75 0.50 1.00 0.75 0.50 0.25 0 0.5 1 1.5 0 u shear-flexibility parameter 0.5 1 1.5 u shear-flexibility parameter (a) anti-symmetrical mode (b) symmetrical mode Figure 3. Normalised critical buckling load (Wcr/Wcr(u=0)) with increasing shear-flexibility for Example 2 with point load at apex using the Majid (1963) method of analysis. The frame has a pinned base and the same overall geometric ratios of Example 2, introduced in Section 2. Prior to using the solution method a successful check was made with -5- benchmark steel frame calculations given by Majid (1963). Figures 2(a) and 3(a) are for the anti-symmetrical mode, whilst Figures 2(b) and 3(b) are for the symmetrical mode of buckling. Critical loads (Wcr(u=0)) for the symmetrical mode (and shear-stiff situation) are 3.75 and 2.71 times higher than for the respective anti-symmetrical mode. One reason for including the case with a point load at the apex of the frame is that there is no uncertainty on what is the analytical expression for the “constant” rafter force. As Figures 2(a) and 3(a) show for the anti-symmetrical mode there are differences between the critical load curves for the two loading cases. Comparing the characteristics of the two curves in Figures 2(a) and 3(a) with those in Figure 1(b) shows the same finding in Mottram (2007) of an initial higher resistance when the conventional set of shear-flexible stability functions are used. The dashed curve results do however demonstrate the expected continuous reduction in Wcr. The new plots in Figures 2(b) and 3(b) for the symmetrical mode show that both sets of shear-flexible stability functions give the anticipated reduction in critical load with increasing parameter u, and that the two sets of functions and two load cases give virtually identical numerical results to u = 1.5. 4 CONCLUSIONS The stability function approached developed by Majid in 1963 has been furthered to study the influence of member shear-flexibility on the elastic critical buckling load of pitched portal frames. Plots of normalized critical load against increase in member shear-flexibility are found to show the same characteristics, with choice of shear-flexible stability functions, as observed by the author using an in-house structural matrix analysis code. Further work, also involving physical testing, is required to evaluate the significance of the finding (for the anti-symmetrical mode shape) that the ‘well-known’ shear-flexible stability functions in Eqs. (2) give computed buckling loads that would be very non-conservative. Given that the use of newer set of shearflexibility functions (Eqs. (3)) predict the expected continuous reduction in critical load, one important outcome from a critical assessment of this paper’s contribution could be to recommend the use of Eqs. (3) in buckling analyses of FRP frames. REFERENCES Abbaker, A. & Mottram, J. T. 2004. The Influence of Shear-flexibility on the Elastic Critical Load for Frames of Pultruded Fibre Reinforced Plastic Section, in Proceedings of 2nd International Conference on Advanced Polymer Composites for Structural Applications in Construction (ACIC 2004), Woodhead Publishing Ltd., Cambridge, 437-444. Abbaker, A. E. 2006. Behaviour of Lightweight Framing Systems for Buildings, PhD thesis, University of Warwick, UK. Al-Sarraf, S. F. 1986. Shear Effect on the Elastic Stability of Frames, The Structural Engineer, 64B(2), 43-47. Bank, L. C. 2006. Composites for Construction: Structural Design with FRP Materials, John Wiley & Sons, New Jersey. BS EN 1992-1-1. 2005. Eurocode 3: Design of Steel Structures - Part 1-1: General Rules and Rules for Buildings, British Standards Institute. Horne, M. R. & Merchant, W. 1965. The Stability of Frames, Pergamon Press Ltd., Oxford. Kleinlogel, A. 1958. Rahmenformeln. Verlag Von Wilhelm Ernst & Sohn. (English translation) Livesley, R. K. & Chandler, D. B. 1956. Stability Functions for Structural Frameworks, Manchester University Press, Manchester. Majid, K. I. 1963. Elastic Plastic Structural Analysis, PhD thesis, University of Manchester. Majid, K. I. 1972. Non-linear Structures, Butterworths, London. Mottram, J. T. & Aberle, M. 2002. When should Shear-flexible Stability Functions be used in Elastic Structural Analysis? Proceedings of the Institution of Civil Engineers: Structures and Buildings, 152(1), 31-40. Mottram, J. T. 2007. Stability Analysis of Plane Frames of Fibre Reinforced Polymer having Semi-rigid Joints and Shear-flexible Members, in Proceedings of the 3rd International Conference on Advanced Composites in Construction (ACIC 2007), York Publishing Services Ltd., York, 61-68. -6-