Optimized Behavioral Interventions: What Does Control Systems Engineering Have to Offer?
advertisement

Optimized Behavioral Interventions:
What Does Control Systems Engineering
Have to Offer?
Daniel E. Rivera
Control Systems Engineering Laboratory
School for Engineering of Matter, Transport, and Energy (SEMTE)
Ira A. Fulton Schools of Engineering
Arizona State University
http://csel.asu.edu
daniel.rivera@asu.edu
CSEL
Joint Prevention and Methodology Seminar
Penn State University
October 6, 2010
CSEL
About this talk
Control Systems Engineering Laboratory
Control Systems Engineering Laboratory
•
Goal is to discuss how control systems engineering can
inform the design and implementation of time-varying
adaptive behavioral interventions.
•
Talk will have some tutorial flavor, but will not be a
comprehensive survey.
•
Emphasis will be given to the connections between behavioral
health, methodology, and engineering, and the opportunities
(and challenges) that these present to the behavioral
scientist, the methodologist, and the engineer.
2
CSEL
Control Systems Engineering Laboratory
Outline
•
What is meant by control systems engineering?
•
How can these concepts improve behavioral interventions?
- Hypothetical time-varying adaptive intervention (inspired by
the Fast Track program) as a control system problem.
- Description and application of Model Predictive Control.
•
Relating theory to control engineering modeling:
Theory of Planned Behavior in a weight loss intervention.
•
Summary and conclusions; looking to the future.
3
CSEL
Control Systems Engineering Laboratory
Current Projects in Behavioral Health
•
K25DA021173*, “Control engineering approaches to adaptive
interventions for fighting drug abuse,” Mentors: L.M. Collins
(Penn State) and S.A. Murphy (Michigan).
•
R21DA024266*, “Dynamical systems and related engineering
approaches to improving behavioral interventions,” NIH
Roadmap Initiative Award on Facilitating Interdisciplinary Research Via
Methodological and Technological Innovation in the Behavioral and
Social Sciences, with L.M. Collins, Penn State, co-PI.
*Funding received from NIDA (National Institute on Drug Abuse) and OBSSR
(Office of Behavioral and Social Sciences Research) is gratefully acknowledged.
4
CSEL
Control Systems Engineering Laboratory
Our Logo (in more detail)...
http://csel.asu.edu/health
5
CSEL
Control Systems Engineering Laboratory
•
Similarities Between Behavioral
Scientists and Control Engineers
Behavioral scientists are interested in developing and delivering
effective interventions that:
- demonstrate high levels of adherence.
- display uniformity and reproducibility despite heterogeneity of
the target population, and inherent variability associated with
delivery of the intervention,
- are cost-effective in nature.
All these goals are compatible with the objectives of
control systems engineering...
6
CSEL
Control Systems Engineering Laboratory
Control Systems Engineering
•
The field that relies on dynamical models to develop algorithms
for adjusting system variables so that their behavior over time is
transformed from undesirable to desirable.
•
Control engineering plays an important part in many everyday life
activities. Some examples of control systems engineering
applications include:
-
Cruise control and climate control in automobiles,
-
The “sensor reheat” feature in microwave ovens,
-
Home heating and cooling,
-
The insulin pump for Type-I diabetics,
-
“Fly-by-wire” systems in high-performance aircraft,
-
Homeostasis,
-
Many, many, more...
7
CSEL
Control Systems Engineering Laboratory
Control Systems Engineering
(Continued)
Control systems engineers strive to improve system operation by
“closing the loop”:
•
Open-loop: refers to system behavior without a controller or
decision rules (i.e., MANUAL operation).
•
Closed-loop: refers to system behavior once a controller or
decision rule is implemented (i.e., AUTOmatic operation).
A well-tuned control system will effectively transfer variability from
an expensive system resource to a less expensive one.
8
From Open-Loop Operation to
Closed-Loop Control (Stochastic Viewpoint)
Controlled
Variable Deviation
(e.g., Temperature)
Open-Loop
(Before Control)
Closed-Loop
Control
Manipulated
Variable Deviation
(e.g., Flowrate)
The transfer of variance from an expensive resource to a cheaper one is one of
the major benefits of control systems engineering
CSEL
9
Control Systems Engineering Laboratory
Control Engineering Concepts Are Not New to
Psychology...
• Carver C.S. and M.F. Scheier. On the self-regulation of behavior. New York:
Cambridge University Press; 1998.
• Hyland, M.E., “Control theory interpretation of psychological mechanisms
of depression: comparison and integration of several theories,” Psychological
Bulletin, Vol. 102, No. 1, pgs. 109-121, 1987.
• Molenaar, P.C.M., “Dynamic assessment and adaptive optimization of the
psychotherapeutic process,” Behavioral Assessment, Vol. 9, pgs. 389-416, 1987.
• Molenaar, P.C.M., “Note on optimization of individual psychotherapeutic
processes,” Journal of Mathematical Psychology, Vol. 54, pgs. 208-213, 2010.
CSEL
Control Systems Engineering Laboratory
10
Basic Components of Adaptive Interventions
(Collins, Murphy, and Bierman, Prevention Science, 5, No. 3, 2004)
• The assignment of a particular dosage and/or type of treatment is
based on the individual’s values on variables that are expected to
moderate the effect of the treatment component; these are known
as tailoring variables.
• In a time-varying adaptive intervention, the tailoring variable is
assessed periodically, so the intervention is adjusted on an on-going
basis.
• Decision rules translate current and previous values of tailoring
variables into choice(s) of treatment and their appropriate dosage.
CSEL
Control Systems Engineering Laboratory
11
Adaptive Intervention Simulation
(inspired by the Fast Track Program, Conduct Problems Prevention Research Group)
•
A multi-year program designed to prevent conduct disorder in at-risk children.
•
Frequency of home-based counseling visits assigned quarterly to families over a
three-year period, based on an assessed level of parental functioning.
•
Parental function (the tailoring variable) is used to determine the frequency of
home visits (the intervention dosage) according to the following decision rules:
- If parental function is “very poor” then the intervention dosage should correspond to
-
weekly home visits,
If parental function is “poor” then the intervention dosage should correspond to
bi-weekly home visits,
If parental function is “below threshold” then the intervention dosage should correspond
to monthly home visits,
If parental function is “at threshold” then the intervention dosage should correspond to
no home visits.
CSEL
Control Systems Engineering Laboratory
12
Parental Function Feedback Loop Block Diagram*
(to decide on home visits for families with at-risk children)
(Open-Loop)
(Closed-Loop
System)
From Rivera, D.E., M.D. Pew, and L.M. Collins, “Using engineering control principles to inform the design
of adaptive interventions: a conceptual introduction,” Drug and Alcohol Dependence, Special Issue on
Adaptive Treatment Strategies, Vol. 88, Supplement 2, May 2007, Pages S31-S40.
CSEL
13
Control Systems Engineering Laboratory
Parental Function - Home Visits Adaptive Intervention as a
Production-Inventory Control System
(Rivera, Pew, and Collins, “Using engineering control principles to inform the design of adaptive interventions,”
Drug and Alcohol Dependence, Vol. 88, Suppl. 2, May 2007, Pages S31-S40)
Controller/
Decision
Rules
Intervention
Dosage
(Manipulated
Variable)
Parental Function Target
(Setpoint Signal)
r(t)
u(t)
θ
KI
( Delay Time) (Gain)
Exogenous
Depletion
Effects
(Disturbance
Variable)
Inflow
ym (t)
LT
Measured Parental
Function
(Feedback Signal)
Parental Function
(Controlled
Variable)
y(t)
d(t)
Outflow
y(t + 1) = y(t) + KI u(t − θ) − d(t)
Parental function y(t) is built up by providing an intervention u(t) (frequency of home visits), that is
potentially subject to delay, and is depleted by potentially multiple disturbances (adding up to d(t)).
CSEL
Control Systems Engineering Laboratory
14
E-.,+F,-.45-0G5<*9,<
)*+,-.*/012-3.45-0678
Parental Function - Counselor Home Visits Adaptive Intervention
Single Participant Family Illustration
0
#""
)*+,-.*/012-3.45)*+,-.*/012-3.45-095*/
("
"
0
!!
"
!
"
!
#$
#%
$&
'"
'!
$&
'"
'!
A,,B/?
@4!A,,B/?
=5-.>/?
:50;4<4.
!!
#$
#%
C4D,06D5-.>8
• The assigned dosage (frequency of counseling visits) decreases as the tailoring
variable (parental function) increases, as prescribed by the decision rules.
CSEL
15
Control Systems Engineering Laboratory
Simple “IF-THEN” Rules May Not Be Optimal
456,1)57-891:)*01-.;3
High Depletion (d(t) = 5)
-
#""
456,1)57-891:)*01
456,1)57-891:)*01-F057
("
"!!
"
!
#$
#%
)*+,-./01)23
$&
'"
'!
C1),6D,1)*01-E0>5F,>
C1),6D,1)*01-E0>5F,>
456,1)57-891:)*01-.;3
No Depletion (d(t) = 0)
A,,B7?
@*!A,,B7?
/01)27?
<0-=*>*)>
!!
"
!
#$
#%
)*+,-./01)23
$&
'"
'!
-
#""
456,1)57-891:)*01
456,1)57-891:)*01-F057
("
"!!
} offset!
"
!
#$
#%
)*+,-./01)23
$&
'"
'!
"
!
#$
#%
)*+,-./01)23
$&
'"
'!
A,,B7?
@*!A,,B7?
/01)27?
<0-=*>*)>
!!
Single participant family scenario. Offset (where parental function fails
to reach a desired goal at the end of the intervention) occurs when
high depletion (representing a large magnitude disturbance) is present.
CSEL
Control Systems Engineering Laboratory
16
Model Predictive Control (MPC)
• Control engineering technology widely used in many industrial applications
(from chemical mfg to automotive and aerospace).
• As an optimization technology, MPC can minimize (or maximize) an objective
function that represents a suitable metric of intervention performance.
• As a control system, MPC accomplishes feedback (and feedforward action)
in the presence of model error, measurement unreliability, and disturbances
that may affect the intervention.
• Three major steps in MPC:
– Prediction of intervention outcomes at time instants in the future (i.e.,
the prediction horizon) based on a model,
– Optimization of a sequence of future dosage decisions through
minimizing (or maximizing) an objective function,
– Receding horizon strategy.
CSEL
17
CSEL
Model Predictive Control
Conceptual Representation
Control Systems Engineering Laboratory
Future
Prior
Tailoring
Variable
Assessments
Tailoring Variable Goal
(Setpoint r(t+i))
Predicted
Tailoring
Variable
!(t+i)
Prediction Horizon
Prior
Depletion
Controlled
Variable
Past
Forecasted Depletion dF(t+i)
(if available)
Disturb.
Variable
Control Systems Engineering Laboratory
Umax
Manipulated
Variable
Prior
Dosages
Future Dosages u(t+i)
Umin
Move Horizon
t
min
∆u(t)...∆u(t+m−1)
t+1
t+m
t+p
Take Tailoring Variables to Goal Penalize Changes in the Intervention Dosages
!
"#
$
!
"#
$
p
m
%
%
2
Qe (i)(ŷ(t + i) − r(t + i)) +
Q∆u (i)(∆u(t + i − 1))2
J=
i=1
i=1
18
CSEL
Model Predictive Control
Flowchart
Control Systems Engineering Laboratory
Offline
Online
Supply a dynamical
model to the control
system.
Assess tailoring variables
(i.e., measure controlled
variables)
Compute an error projection utilizing the
model, previous measurements and
decisions, and disturbance forecasts
(if available).
Specify controller parameters
to meet desired performance
and robustness.
Solve a mixed-integer quadratic program
(MIQP) which calculates the optimal sequence
of future dosages that minimize the objective
function subject to constraints.
Implement the
first dosage decision
(i.e., move)
Wait until the
next review
period.
19
Controller/Decision Rule Comparison, Scenario 1
High Depletion Rate (d(t) = 5)
Model Predictive Control
(Qe = 1, Qdu = 0.05, p = 30, m = 10)
456,1)57-891:)*01-.;3
-
#""
456,1)57-891:)*01
456,1)57-891:)*01-F057
("
"!!
} offset!
"
!
#$
#%
)*+,-./01)23
$&
'"
'!
C1),6D,1)*01-E0>5F,>
C1),6D,1)*01-E0>5F,>
456,1)57-891:)*01-.;3
“IF-THEN” rules
A,,B7?
@*!A,,B7?
/01)27?
<0-=*>*)>
!!
"
!
#$
#%
)*+,-./01)23
$&
'"
-
#""
456,1)57-891:)*01
456,1)57-891:)*01-F057
("
"!!
"
!
#$
#%
)*+,-./01)23
$&
'"
'!
-
A,,B7?
@*!A,,B7?
'!
/01)27?
<0-=*>*)> !!
"
!
#$
#%
)*+,-./01)23
$&
'"
'!
36 month intervention reviewed at quarterly intervals. Offset problem is eliminated in the MPC
controller through judicious assignment of intervention dosages during the course of the intervention.
CSEL
Control Systems Engineering Laboratory
20
CSEL
IF-THEN vs. MPC Comparison
(Robustness Analysis)
Control Systems Engineering Laboratory
• The system response of five participant families, each characterized by its own dynamical
model, is evaluated using a controller tuned on the basis of an average (“nominal”) effect.
MPC Control
(Qe = 1, Qdu = 0.05, p = 30, m = 10)
#""
("
"
(
&
'
$
456)*7*851)-91:,;
#
!! "
!
4<-.=3
4<-.=3
“IF-THEN” Decision Rules
'!
$& '"
#$ #%
#""
("
"
(
&
)*+,-./01)23
'
$
D,,EAB
C*!D,,EAB
/01)2AB
>0-?*@*)@
(
&
'
456)*7*851)-91:,;
$
#
!! "
!
'!
$& '"
#$ #%
91),6F,1)*01
91),6F,1)*01
456)*7*851)-91:,;
D,,EAB
C*!D,,EAB
/01)2AB
>0-?*@*)@
(
&
)*+,-./01)23
'
$
456)*7*851)-91:,;
#
!! "
!
#
!! "
!
'!
$& '"
#$ #%
)*+,-./01)23
'!
$& '"
#$ #%
)*+,-./01)23
• The MPC controller individually assigns the proper intervention dosages to each
participant family, leading to no offset and more consistent outcomes. This is
achieved at the expense of greater variability in the intervention dosages.
21
Simulation Cases
• Scenario 1: Comparison with simple “IF-THEN” rules.
• Scenario 2: Constrained, augmented operation.
Total number of counseling visits constrained to an upper limit; group
counseling may be offered when in-home visit limit is reached.
– Scenario 2(a):
» Unlimited counseling visits, no group meeting available.
– Scenario 2(b) :
» Overall dosage limited to a maximum of 48 in-home counseling visits;
» no group meeting available.
– Scenario 2(c):
» Overall dosage limited to a maximum of 48 in-home counseling visits;
» Group counseling available when in-home visit limitation is reached.
CSEL
Control Systems Engineering Laboratory
22
Scenario 2(a)
()*+,-.)/012,304-5313*1
0
#""
)*+,-.*/012-3.45)*+,-.*/012-3.45-095*/
("
"0
!!
"
!
#$
#%
$&
'"
!"
&"
$"
"
'!
!!
A,,B/?
9:)/;-822*304
E52-<,/4-90F4<4.<
)*+,-.*/012-3.45-0678
(No limit on number of counseling visits; no group meeting offered)
@4!A,,B/?
=5-.>/?
:50;4<4.
"
!
#$
"
!
#$
#%
$&
'"
'!
#%
$&
'"
'!
721
6)
!!
"
!
#$
#%
$&
'"
'!
!!
C4D,
(382
• 69 total counseling visits required in this unconstrained
scenario to achieve the parental function goal without offset.
CSEL
23
Control Systems Engineering Laboratory
Scenario 2(b)
)*+,-.*/012-3.45)*+,-.*/012-3.45-095*/
("
"0
!!
"
!
#$
#%
$&
'"
()*+,-.)/012,304-5313*1
0
#""
&"
$"
"
!!
A,,B/?
@4!A,,B/?
=5-.>/?
:50;4<4.
!!
!"
'!
9:)/;-822*304
E52-<,/4-90F4<4.<
)*+,-.*/012-3.45-0678
(Counseling visits limited to 48 (total); no group meeting offered)
"
!
#$
"
!
#$
#%
$&
'"
'!
#%
$&
'"
'!
721
6)
"
!
#$
#%
$&
'"
'!
!!
C4D,
(382
• The dosage constraint places a fundamental limit on the effectiveness
of the intervention. The controller does “the best it can” (for the
given objective function parameters), within these restrictions.
CSEL
Control Systems Engineering Laboratory
24
Scenario 2(c)
)*+,-.*/012-3.45)*+,-.*/012-3.45-095*/
("
"0
!!
"
!
#$
#%
$&
'"
()*+,-.)/012,304-5313*1
0
#""
'!
A,,B/?
@4!A,,B/?
=5-.>/?
:50;4<4.
!!
!"
&"
$"
"
!!
9:)/;-822*304
E52-<,/4-90F4<4.<
)*+,-.*/012-3.45-0678
(Counseling visits limited to 48 (total); group meeting available)
"
!
#$
"
!
#$
#%
$&
'"
'!
#%
$&
'"
'!
721
6)
"
!
#$
#%
$&
'"
'!
!!
C4D,
(382
• MPC adapts the intervention to meet the outcome goal,
properly sequencing the additional intervention component
(once the counseling visits limit is reached).
CSEL
25
Control Systems Engineering Laboratory
Some Challenges
• Dynamic modeling from intensive longitudinal data using ideas from
system identification (engineering) and functional data analysis (statistics).
• Developing novel (and practical) experimental designs within the vast,
challenging domain of behavioral health.
• Issues with controller tuning (which impact modeling); resolving the
nomothetic versus idiographic debate.
• Application areas (with L.M. Collins, R21 Roadmap Project):
– Low-dose naltrexone for fibromyalgia (Jarred Younger, Stanford University).
– Weight loss interventions; prevention of excessive gestational weight gain
(D. Downs, J. Savage and L. Birch, Penn State; D. Thomas, Montclair State)
– Dynamical systems modeling of smoking behavior and cessation (with M. Piper, T.
Baker, M. Fiore, UW-Center for Tobacco Research and Intervention)
CSEL
Control Systems Engineering Laboratory
26
CSEL
Intervention acts upon
Control Systems Engineering Laboratory
{
Attitude toward
the behavior
Subjective norm
Perceived
behavioral control
Conceptual Model for
Weight Change Interventions
Energy
Balance
Model
Diet
Behavioral
Model
Physical Activity
Fat-free mass
Fat mass
The dynamical model consists of a system of integrated
differential equations describing:
• Physiology (energy balance),
• Behavior change (Theory of Planned Behavior).
Navarro-Barrientos, J.E., D.E. Rivera, and L.M. Collins, “A dynamical systems model for
understanding behavioral interventions for weight loss,” 2010 International Conference on
Social Computing, Behavioral Modeling, and Prediction (SBP 2010), Springer.
27
CSEL
Control Systems Engineering Laboratory
Behavioral
belief ×
evaluation
of outcome
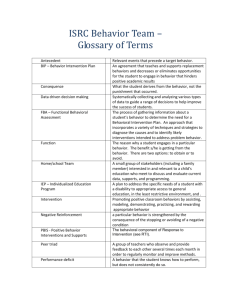
Path Diagram for the
Theory of Planned Behavior
γ11
ζ1
Attitude
Toward the
Behavior
(η1 )
(ξ1 = b1 × e1 )
β41
ζ5
ζ4
Normative
belief ×
motivation
to comply
ζ2
γ22
(ξ2 = n1 × m1 )
Subjective
Norm
(η2 )
β42
Intention
β54
(η4 )
Behavior
(η5 )
β43
β53
Control
belief ×
power of
control belief
γ33
(ξ3 = c1 × p1 )
η1
η2
η3
η4
η5
η
=
=
Bη+Γξ+ζ
0
0
0
0
0
0
0
0
0
β41 β42 β43
0
0 β53
Perceived
Behavioral
Control
(η3 )
0
0
0
0
β54
ζ3
0
0
0
0
0
η1
η2
η3
η4
η5
28
+
γ11
0
0
0
0
0
γ22
0
0
0
0
0
γ33
0
0
ξ1
ξ2 +
ξ3
ζ1
ζ2
ζ3
ζ4
ζ5
CSEL
Fluid Analogy for the
Theory of Planned Behavior
Control Systems Engineering Laboratory
ξ2 (t)
γ22 ξ2 (t − θ2 )
ζ2 (t)
3##4
ξ1 (t)
5/67&8%',&
9(-:
γ11 ξ1 (t − θ1 )
ζ1 (t)
3##4
.%%'%/0&
(η1 )
#4
(1 − β41 )η1
(η2 )
#4
β42 η2 (t − θ5 )
γ33 ξ3 (t − θ3 )
ζ3 (t)
3##4
(1 − β42 )η2
1)2
ζ4 (t)
β43 η3 (t − θ6 )
β41 η1 (t − θ4 )
(η3 )
3##4
β53 η3 (t − θ8 )
!$%&$%'($
#4
(η!"#4 )
(1 − β54 )η4
β54 η4 (t − θ7 )
#4
(1 − β43 − β53 )η3
ζ5 (t)
3##4
)&*+,'(-
(η5 )
#4
η5 (t)
29
CSEL
Control Systems Engineering Laboratory
Dynamic TPB Model
The conservation principle (Accumulation = Inflow − Outflow) leads to the
following system of differential equations:
dη1
dt
dη2
τ2
dt
dη3
τ3
dt
dη4
τ4
dt
dη5
τ5
dt
τ1
= γ11 ξ1 (t − θ1 ) − η1 (t) + ζ1 (t)
= γ22 ξ2 (t − θ2 ) − η2 (t) + ζ2 (t)
= γ33 ξ3 (t − θ3 ) − η3 (t) + ζ3 (t)
= β41 η1 (t − θ4 ) + β42 η2 (t − θ5 ) + β43 η3 (t − θ6 ) − η4 (t) + ζ4 (t)
= β54 η4 (t − θ7 ) + β53 η3 (t − θ8 ) − η5 (t) + ζ5 (t),
where:
τ1 , · · · , τ5 are time constants,
η1 , · · · , η5 are the inventories,
ξ1 (t) = b1 (t)e1 (t), ξ2 (t) = n1 (t)m1 (t), ξ3 (t) = c1 (t)p1 (t),
γ11 , · · · , γ33 are the inflow resistances,
β41 , · · · , β54 are the outflow resistances,
θ1 , · · · , θ7 are time delays and ζ1 , · · · , ζ5 are disturbances.
30
ξ3 (t)
CSEL
Dynamic TPB Model:
simulation results
Control Systems Engineering Laboratory
System response for various step change increases in strength of beliefs to attitude:
Input ("1)
100
50
Attitude (!1)
0
100
50
Intention (!4)
0
80
60
40
20
Behavior (!5)
0
50
40
b1=8, e1=8, 2nd order
30
b1=6, e1=6, 1st order
20
b1=4, e1=4
10
0
0
5
10
15
20
25
30
35
t
Model parameters:
θ1 = · · · θ3 = 0, θ4 = · · · θ7 = 2
τ1 = · · · τ3 = 1, τ4 = 2, τ5 = 4
γij = 1, βij = 0.5, ζi = 0
ξ1 = b1 × e1 :
(solid) b1 = 4, e1 = 4
(dashed) b1 = 6, e1 = 6
(dot-dashed) b1 = 8, e1 = 8
31
CSEL
Control Systems Engineering Laboratory
Dynamical TPB Model Summary
•
At steady-state, the dynamical model corresponds exactly
to the TPB structural equation model (SEM),
•
Additional model parameters (time constants, delays, and
damping coefficients) represent transient behavior in a
manner fully consistent with dynamical systems theory,
•
Parameter estimation from data can be accomplished by:
- system identification (engineering)
- functional data analysis (statistics).
32
CSEL
Conceptual Model for Gestational
Weight Gain Interventions
Intervention acts upon
Intervention acts upon
Control Systems Engineering Laboratory
{
Subjective norm
Perceived
behavioral control
{
b1
Attitude toward
the behavior
Energy
Intake
TPB
Model
e1
n1
m1
c1
p1
Fetal
Energy
Balance
Model
FFMf
FMf
Fetal
energy
intake
b1
Attitude toward
the behavior
Physical
Activity
TPB
Model
e1
n1
Subjective norm
m1
c1
Perceived
behavioral control
p1
Diet
Physical
Activity
Placental
Volume
Maternal
Energy
Balance
Model
FFMm
FMm
Energy Balance Model
Behavioral Model
33
CSEL
Fluid Analogy for Mediation Analysis
Control Systems Engineering Laboratory
Path Diagram:
aT (t − θ1 )
T (t)
e1 (t)
$##%
e1
e2 (t)
M
b
a
T
!
c
e2
c! T (t − θ2 )
bM (t − θ3 )
$##%
Y (t)
Y
#%
M (t)
#%
bM (t)
(1 − b)M (t)
,(-%
!"#
&%'(')"*+%
Y (t)
!"#$%
dM
τ1
= a T (t − θ1 ) − M (t) + e1 (t)
dt
dY
τ2
= c! T (t − θ2 ) + b M (t − θ3 ) − Y (t) + e2 (t).
dt
Time constant (!) and delay (!) variables are essential features in this
dynamic model representation for mediation. Aspects of moderation and
confounding phenomena can also be explained through a fluid analogy.
34
CSEL
Control Systems Engineering Laboratory
Smoking Cessation Intervention:
Group Averages
30
Negative Affect
Craving
25
20
15
10
5
•
0
5
10
15
20
25
Time (days)
30
35
40
45
Following the quit date (day 15), dynamic responses are observed in craving
(blue) and negative affect (red) for treatment group receiving drug and
counseling.
35
Summary and Conclusions
• Adaptive behavioral interventions constitute dynamical systems that can be
optimized by applying a control engineering perspective.
• Applying a control engineering requires intensive measurement and a
recognition of the input/output nature of phenomena associated with
behavioral interventions.
• A hypothetical adaptive intervention based on Fast Track has been evaluated
using simple “IF-THEN” decision rules vs. an engineering-based Model
Predictive Control decision algorithm.
• Fluid analogies from supply chain management have been useful as the basis
for modeling adaptive interventions, and relating theory and SEM models to
engineering control systems.
• A plethora of opportunities exist in applying systems approaches to
behavioral interventions which include novel experimental design,
formulation of optimal decision policies, and simulation.
CSEL
Control Systems Engineering Laboratory
36
CSEL
Control Systems Engineering Laboratory
Looking to the Future
We have considered the importance of establishing connections between
prevention/behavioral health, methodology, and engineering. Some
implications of this work (not an exhaustive list):
• Behavioral scientist: willingness to collect and work with intensive
longitudinal data, reconfigure interventions to enable adaptation (i.e.,
systematically assess tailoring variables and allow dosage changes through
the course of the intervention).
• Methodologist: develop expertise and familiarity with differential
equations, dynamical input/output system models, and control theory.
• Control engineer: work with data sets that may be irregularly sampled,
have missing entries, and involve multiple human participants. Understand
experimental designs meaningful to problems in behavioral health. Examine
and understand the nomothetic vs. idiographic methods debate.
37
CSEL
Control Systems Engineering Laboratory
Acknowledgments
• Linda M. Collins, Ph.D., The Methodology Center and Dept. of
Human Development and Family Studies, Penn State University.
• Susan D. Murphy, Ph.D., Department of Statistics, Department of
Psychiatry, and Institute for Social Research, Univ. of Michigan.
• R21 Roadmap Initiative Grant Project Team (N. Nandola, J.E.
Navarro, S. Deshpande, ASU; J. Johnson and I. Shani, PSU)
Support from NIH-NIDA (National Institute on Drug Abuse) and
NIH-OBSSR (Office of Behavioral and Social Sciences Research) through
Grants K25DA021173 and R21DA024266
38
CSEL
Control Systems Engineering Laboratory
Primary References
• Collins, L.M., S.A. Murphy, and K.L. Bierman, “A conceptual framework for adaptive preventive
interventions,” Prevention Science, 5, No. 3, pgs. 185-196, Sept., 2004.
• Rivera, D.E., M.D. Pew, and L.M. Collins, “Using engineering control principles to inform the
design of adaptive interventions: a conceptual introduction,” Drug and Alcohol Dependence,
Special Issue on Adaptive Treatment Strategies, Vol. 88, Supplement 2, May 2007, Pages S31-S40.
• Rivera, D.E., M.D. Pew, L.M. Collins, and S.A. Murphy, “Engineering control approaches for the
design and analysis of adaptive, time-varying interventions,” Technical Report 05-73, The
Methodology Center, Penn State University;
• Nandola, N. and D.E. Rivera, “A novel model predictive control formulation for hybrid systems
with application to adaptive behavioral interventions,” Proceedings of the 2010 American Control
Conference, Baltimore, MD, June 30 - July 2, 2010.
• Navarro-Barrientos, J.E., D.E. Rivera, and L.M. Collins, "A dynamical systems model for
understanding behavioral interventions for weight loss," !2010 International Conference on Social
Computing, Behavioral Modeling, and Prediction (SBP 2010), March 29 - April 1, 2010; extended
version in press to Mathematical and Computer Modelling of Dynamical Systems.
39
CSEL
Control Systems Engineering Laboratory
•
•
Additional References
Some additional tutorial presentations that may be of interest:
•
Rivera, D.E., “Engineering control theory: can it impact adaptive interventions?”
tutorial presentation at 2010 Society for Prevention Research workshop, June 1, 2010.
Can be downloaded from http://csel.asu.edu/adaptiveintervention (select item 10).
•
Rivera, D.E., “A brief introduction to system identification,”
Penn State Methodology Center Brown Bag presentation, March 20, 2008.
Can be downloaded from http://csel.asu.edu/controleducation (select item 10).
•
Rivera, D.E., “An introduction to mechanistic models and control theory,” tutorial
presentation at the SAMSI Summer 2007 Program on Challenges in Dynamic Treatment
Regimes and Multistage Decision-Making, June 18 - 29, 2007.
Can be downloaded from http://csel.asu.edu/controleducation (select item 9).
A free web-based reference, written by two distinguished control engineers:
•
Åström, K. J. and R. M. Murray. Feedback systems: an introduction for
scientists and engineers,” http://www.cds.caltech.edu/~murray/amwiki.
40