A Combinatorial Search Perspective on Diverse Solution Generation
advertisement
A Combinatorial Search Perspective on Diverse Solution Generation
Satya Gautam Vadlamudi and Subbarao Kambhampati
School of Computing, Informatics, and Decision Systems Engineering
Arizona State University
{gautam , rao}@asu.edu
Abstract
Finding diverse solutions has become important in many
combinatorial search domains, including Automated Planning, Path Planning and Constraint Programming. Much of
the work in these directions has however focussed on coming up with appropriate diversity metrics and compiling
those metrics in to the solvers/planners. Most approaches use
linear-time greedy algorithms for exploring the state space
of solution combinations for generating a diverse set of solutions, limiting not only their completeness but also their
effectiveness within a time bound. In this paper, we take a
combinatorial search perspective on generating diverse solutions. We present a generic bi-level optimization framework
for finding cost-sensitive diverse solutions. We propose complete methods under this framework, which guarantee finding
a set of cost sensitive diverse solutions satisficing the given
criteria whenever there exists such a set. We identify various aspects that affect the performance of these exhaustive
algorithms and propose techniques to improve them. Experimental results show the efficacy of the proposed framework
compared to an existing greedy approach.
In many real-world domains involving combinatorial search
such as automated planning, path planning and constraint
programming, generating diverse solutions is of much importance. In the case of automated planning, real-world scenario often involves working with unknown or partially
known user preferences (Kambhampati 2007), as the user
preferences are many times difficult to be articulated and
specified completely. Such situations lead to multiple, often, large number of plans that satisfy a given problem instance. In order to facilitate serving the user with a closest
plan possible as per her (hidden) preferences, presenting a
diverse set of plans to the user is explored (Roberts, Howe,
and Ray 2014; Nguyen et al. 2012) so that the user can make
a well-informed decision. In the constraint programming domain, diverse (resp. similar) solutions are explored in order
to handle unknown user preferences as well as to generate
robust solutions (Hebrard et al. 2005).
Several methods have been proposed in the literature for
finding a diverse set of plans. In the context of constraint
programming, (Hebrard et al. 2005) presents a complete
method which creates K copies of the Constraint Satisfacc 2016, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
tion Problem (CSP),each copy with a different set of variable names, adds K
2 additional constraints for handling the
minimum distance requirement between all pairs, and uses
off-the-shelf solvers to generate solutions. As one would expect, they report that this approach generates prohibitively
large CSPs and therefore propose a greedy method. The
greedy approach which has since been widely adopted (Petit and Trapp 2015; Bloem 2015; Roberts, Howe, and Ray
2014; Nguyen et al. 2012) works as follows:
Obtain a candidate solution satisfying any given cost criteria, add this to the solution K-set, provide feedback to the
method finding candidate solutions about the current composition of the K-set so that it tries to find the next candidate
solution distant to the current K-set. Upon obtaining the next
candidate solution, the greedy method adds it to the K-set if
it indeed satisfies the distance criteria and provides feedback
to find the next solution, otherwise the candidate solution is
simply discarded. This process is continued until a set of K
diverse solutions is found. (Roberts, Howe, and Ray 2014;
Eiter et al. 2013) and (Nguyen et al. 2012) consider the
first solution generated to be the starting solution (permanent member) for constructing the K-set through the above
greedy approach. (Bloem 2015) considers an optimal solution to be the starting solution of the greedy method. (Petit
and Trapp 2015) attempt to address the issue of fixed starting solution by running the greedy approach multiple times
with different optimal solutions as the starting solution on
each occasion.
A pertinent issue with the above approaches is that the
first solution (or an optimal solution) is always considered
to be part of the solution set, which may often result in not
finding a K-set even when there exists one, even with a very
good feedback strategy to search for distant solutions after
finding the initial solution. Note that an optimal solution (or
the first found solution) need not be part of a diverse set of
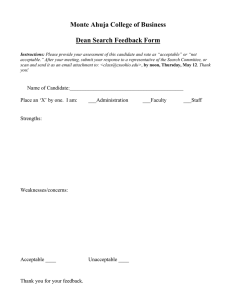
the required size at all. Figure 1 shows an example of an
instance where the optimal solution is not part of the most
diverse solution set of size 2 (assuming that the distance between two plans is inversely proportional to the number of
edges/actions they have in common; p1 and p2 have edge a
in common and p2 and p3 have edge b in common).
In this paper, we address this problem in depth by proposing complete algorithms which guarantee to find a set of K
diverse solutions whenever there exists one. In order to ac-
Start
p1
1
3
G1
a
1
p2
1
2
1 b
p3
G2
Figure 1: A state-space graph where the optimal cost path
p2, does not belong to the most diverse solution set of size 2
{p1,p3}. G1 and G2 indicate goal nodes.
complish completeness, we first need methods for exploring
all possible cost sensitive solutions in the given domain. For
this, we present extensions of the m-A* algorithm (Dechter,
Flerova, and Marinescu 2012) and the Depth-First Branch
and Bound algorithm (Lawler and Wood 1966) for finding
all cost-bounded plans. One could adapt other types of methods such as anytime heuristic search algorithms as well for
this purpose. Second, we present a simple strategy for exhaustively exploring the set of all plan combinations. This
would guarantee completeness for finding a K-set whenever there exists one, thereby addressing the issues in existing methods. However, we note that the simple exhaustive
method ends up having to explore a large number of combinations as one finds more and more candidate plans, severely
impacting the performance of the overall algorithm. In order
to address this problem, we propose a method which considers only a few most promising plan combinations whenever
a new candidate solution is found, and postpones the exploration of remaining combinations for the end to guarantee
completeness. This new method is advantageous over the
widely followed greedy approach on two fronts: it explores
a larger (compared to only one combination of the greedy
approach) but limited number of combinations upon finding
a candidate solution thereby increasing its likelihood of finding a diverse K-set quickly, and it keeps track of the combinations that are left postponed to revisit at the end thereby
guaranteeing completeness.
Further, our method for exploring the plan-combinations
space can be used in conjunction with any of the existing
methods to improve their performance, as it is complementary in nature, replacing the weaker section of those methods
where the greedy approach is present.
Refanidis 2013), air traffic control advisories (Bloem and
Bambos 2014), and robotics (Voss, Moll, and Kavraki 2015).
An important measure in determining diversity is the distance between plans. In this paper, we assume that the distance measure is given as input by the user. Several distance measures have been proposed in the literature that are
quantitative or qualitative (Scala 2014; Coman and MuñozAvila 2011; Goldman and Kuter 2015). Solution diversity
is explored in both deterministic and non-deterministic domains using the distance metrics (Coman 2012). Distance
measures for finding semantically distinct plans are explored
in (Bryce 2014) based on landmarks. In the context of constraint programming, distance constraints in terms of ideal
and non-ideal solutions are studied in (Hebrard, O’Sullivan,
and Walsh 2007).
SAT-based heuristic methods for generating diverse solutions were proposed in (Nadel 2011). Methods through
compilation to CSP, and using heuristic local search have
been proposed in (Srivastava et al. 2007), which use GPCSP planner (Do and Kambhampati 2001) and LPG planner (Gerevini, Saetti, and Serina 2003). Comparison of firstprinciple techniques and case-based planning techniques to
find diverse plans is shown in (Coman and Muñoz-Avila
2012a). These algorithms too use the greedy approach presented before for exploring the space of plan combinations,
leading to the same issues pointed in the Introduction.
Problem Setup
In this paper, we consider the problem of finding a set of solutions that are not only diverse but are also cost sensitive.
In particular, we consider the problem of finding a set of K
cost sensitive diverse (loopless) solutions. Cost sensitivity
of the solutions is controlled by the input c (maximum cost
of each of the solutions) and diversity of the solution sets is
controlled by the input d (minimum distance between each
pair of solutions; or an appropriate set based diversity metric). Both the cost metric and the distance metric are also assumed to be inputs from the user, hence, the studies on good
quality cost metrics and distance metrics are orthogonal to
our work. Further, we choose the planning domain to showcase our framework and methods, which could be adapted to
other domains. Hence, the problem at-hand can be formally
stated as: Given a planning problem with the set of loopless
solution plans S, a cost metric for the plans C : S → R and
a distance metric for the pairs of plans δ : S × S → R (a set
based diversity metric may also be used here), the problem
is defined as:
cCOSTdDISTANTkSET: Find P with P ⊆ S,
(1)
|P| =k, min δ(p, q) ≥ d and C(p) ≤ c ∀p ∈ P
p, q ∈ P
Related Work
Several applications have been related to using diverse solutions in recent years, such as, for course of action generation in cyber security (Boddy et al. 2005), personalized security agents (Roberts et al. 2012), diverse finite
state machines for non-player characters in games (Coman
and Muñoz-Avila 2013; 2012b), formal verification (Nadel
2011), mining group patterns (Vadlamudi, Chakrabarti, and
Sarkar 2012), scheduling personal activities (Alexiadis and
The problem is computationally hard given that the problem
of finding cost-bounded plans is PSPACE-complete (Bylander 1991) and the problem of finding a diverse set of plans
is NP-complete (Bloem 2015) with input size (number of
plans) that can potentially be exponential in terms of the
number of state variables. Finding a set of diverse solutions
is shown to be FPN P [log n] -complete in the context of constraint programming (Hebrard et al. 2005), where n is the
size of the input.
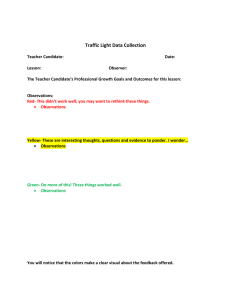
Explore All Solution Combinations
(Level 2)
Solution Stream
Feedback
Explore All Satisficing Solutions
(Level 1)
Figure 2: A framework for finding a diverse set of solutions
that supports completeness.
Proposed Methods & Properties
Now, we present the proposed framework which supports
completeness, and specific methods that obey the framework
requirements. As mentioned above, the problem of finding a
diverse set of plans is a bi-level optimization problem which
involves exploring the set of all candidate plans (Level 1)
and considering the set of all combinations of these plans
(Level 2). Therefore, in order to guarantee completeness,
we propose to have a framework with a complete method
which guarantees finding all the candidate plans and outputs as a stream, and another complete method that takes
the stream of plans being generated by the previous method
as input and explores all combinations of plan sets as per
the diversity criteria until a diverse set of size K is found.
Such a framework ensures that all possible cases are considered and hence guarantees completeness. Figure 2 shows the
framework with the control flow. In this paper, we emphasize
mainly on how to explore all the solutions and all the solution combinations efficiently so as to guarantee completeness while not impeding the search progress due to their individual exhaustive nature. The feedback component shown
in the figure is particular to the domain elements and their
distance measures which we do not explore in this work
leaving it as an option for the user to plug-in to the proposed
framework and methods.
Algorithms for Finding All Cost Sensitive Solutions
For the Level 1, the problem is to find the set of all candidate plans that can potentially be part of a diverse solution
set. In our case, the set of all candidate plans correspond to
the set of all valid loopless plans whose cost is ≤ max cost.
We present two complete methods which guarantee generating the set of all candidate plans, one based on DepthFirst Branch and Bound (DFBB) (Lawler and Wood 1966;
Russell and Norvig 1995) and another based on a recent algorithm for finding M best solutions in graphical models,
called m-A* (Dechter, Flerova, and Marinescu 2012). One
may also use other complete methods and extend them to
generate all candidate solutions whose cost is ≤ max cost.
First, we present the DFBB based algorithm for finding
all candidate plans, called DFA. It works similar to regular
DFBB search on graph spaces except for the following two
differences: (i) it does not stop after finding a single solution within the max cost bound, and (ii) it does not conduct
full duplicate detection (any state reached through a differ-
ent path from the start state leads to a new node unless there
is a loop, at which point it simply backtracks to find other
solutions). It is easy to prove that:
Lemma 1 DFA generates all valid loopless plans whose
cost is ≤ max cost, given that the edges of the search graph
have positive costs and the heuristic used is admissible.
Now, we describe the second algorithm for finding the set
of all candidate plans, called A*A. This is based on the mA* algorithm (Dechter, Flerova, and Marinescu 2012) which
guarantees finding m best solutions/plans by expanding the
minimum set of nodes. First, we describe the basic idea behind m-A* and then we extend it to find the set of all candidate plans for our problem. The basic idea behind m-A* is to
proceed in a manner similar to A* and whenever a duplicate
state is found, the most promising m nodes corresponding to
that state are to be considered for expansion and the rest be
discarded. For our problem, where we want to find the set
of all cost-bounded plans, we will have to keep all the nodes
corresponding to same state for expansion without the mlimit. This eliminates the requirement of full-scale duplicate
detection all-together, instead suggests treatment of all children being generated as new. However, since we are only
interested in loopless plans, we will discard all nodes which
cause loops in the partial plan at any stage, through cycle
checking. We call this adapted strategy- A*A (A* based approach for finding All cost-bounded solutions). Once again,
it can be proven that:
Lemma 2 A*A generates all valid loopless plans whose
cost is ≤ max cost, given that the edges of the search graph
have positive costs and the heuristic used is admissible.
Complete Algorithms for Finding a Diverse
Solution Set
Now, we present the algorithms for Level 2 of our framework, where the stream of all candidate plans, the distance
measure, the size of the diverse plan set needed and the minimum distance between any two plans of the solution set is
given as input, to produce a set of satisficing diverse plans.
Algorithm 1 presents a simple strategy called ACER
which explores all combinations of plans in each run for the
in-coming new plan in conjunction with all of the existing
valid plan sets. It is easy to prove that:
Lemma 3 ACER finds a diverse plan set of size K from the
set/stream of all candidate plans whenever there exists one.
However, G can grow rapidly and become an exponential sized set in terms of K with base being the number of
candidate plans (which itself can be of exponential size in
terms of the planning problem input) before finding a diverse plan set. This severely limits its scalability when there
are large number of candidate plans (even for moderate values of K), which is often the case in practice. Next, we will
present a method which does not explore all plan set combinations in one shot instead only a select most promising sets
at each stage, while keeping track of unexplored combinations that may be explored at the end (after processing the
entire stream of candidate plans once) for completeness.
Algorithm 1 Explore All Possible Combinations of Solutions in Each Run (ACER)
Algorithm 2 Explore Most-promising Combinations of Solutions in Each Run (MCER)
1: INPUT :: A candidate plan p (from the stream of all candidate plans), a distance measure dist(), the minimum distance
needed between any two plans of a set min dist, and the size
of the diverse plan set K.
2: OUTPUT :: A diverse plan set of size K (if exists), otherwise
the largest diverse plan set.
3: G ← φ (empty set); (initially) // Global data; the set of all valid
plan sets.
4: for each plan set P ∈ G do
5:
if dist(p, l) > min dist ∀l ∈ P then
6:
P 0 ← P + {p};
7:
if |P 0 | = K then
8:
return P 0 ;
9:
end if
10:
G ← G∪P 0 ;
11:
end if
12: end for
13: G ← G∪{p};
14: return largest P ∈ G;
1: INPUT :: A candidate plan p (from the stream of all candidate
plans), its sequence number in the stream i, a distance measure
dist(), the minimum distance needed between any two plans
of a set min dist, the size of the diverse plan set K, and the
number of seed plan sets to be explored n.
2: OUTPUT :: A diverse plan set of size K (if exists), otherwise
the largest diverse plan set.
3: G ← φ (empty set); (initially) // Global data; the set of all valid
plan sets with satellite data.
4: Open ← φ; Children ← φ;
5: ExpandMostPromising(G, n, Children);
6: if a diverse set P of size K is found then
7:
return P ;
8: end if
9: while Children 6= φ do
10:
Swap Children and Open;
11:
ExpandMostPromising(Open, n, Children);
12:
if a diverse set P of size K is found then
13:
return P ;
14:
end if
15:
Move all plan sets in Open to G;
16: end while
17: P ← {p}; Pexp ← i;
18: G ← G∪P ;
19: return largest P ∈ G;
The second technique, which is an adaptation of the
Anytime Pack Search method (Vadlamudi, Aine, and
Chakrabarti 2015; 2013), focuses on exploring a limited set
of seed nodes in each iteration in a beam search like manner.
It processes the stream of candidate plans much faster than
the previous approach by focusing only on a select number
of most promising plan sets to begin with. The combinations
which this technique ignores while processing the candidate
plan stream are kept track of separately for processing at the
end, which helps in guaranteeing the completeness. Algorithm 2 presents the proposed method MCER for faster processing of the stream of candidate plans. It takes as input,
a plan from the stream of candidate plans and its sequence
number for reasons that will become clear shortly, and the
inputs for determining a diverse set similar to the previous
approach, and the number of seed plan sets to be explored
upon finding a new candidate plan.The plan-combinations
space can be visualized as a set enumeration tree (Rymon
1992), where new branches come at all levels (> 0) dynamically as the stream of candidate plans is processed.
MCER maintains a global set of valid plan sets which
have been produced until now, G, that could be further expanded with new candidate plans. It expands n most promising nodes from this set, which are populated into Children.
If a diverse set of size K is found, it terminates returning the
set. Otherwise, n most promising plan sets from Children
are expanded, and then their n most promising children and
so on until there are no further children to be expanded. It
should also be mentioned at this point, as to what we mean
by ‘most promising’, which would be based on f -value of a
plan set (the largest being most promising), and f -value is
in-turn computed as g + h where g is the size of the plan
set and h is the heuristic estimate denoting potential number of plans that can be added to this plan set. In this paper, we have explored using three heuristics: (i) 0, (ii) dispersion of the current set (arithmetic mean of all pair-wise
distances (Myers and Lee 1999)) divided by min dist, and
(iii) quadratic mean of all distances divided by min dist.
The idea behind these heuristics is that the more dispersion
the sets have the more accommodative they could be of new
candidate plans. However, in our experiments, we did not
observe gains of using the dispersion based heuristics in our
experiments compared to the trivial heuristic possibly due
to the limitation of the said heuristics in accounting for the
actions that are not part of the plans found yet, at any given
moment during the runtime. More distance metric based and
domain based estimates can be explored here in future.
Algorithm 3 presents the pseudo-code of ExpandMostPromising routine. It expands the n most promising nodes
from the given list (either G or Open) and puts them in
Children. One significant difference to note here is that,
since all the candidate plans are not available apriori, one
must add the expanded nodes back to G for future consideration with newer candidate plans. While doing so, in order
to avoid repetition, we keep track of the last child generation attempt through the sequence number of candidate plan
considered.
Finally, after the entire stream of candidate solutions has
been processed one by one using MCER, if a diverse set of
size K is not found, we continue to call MCER repeatedly
(this time, without adding back the explored plan sets into G)
until it finds a K-set or terminates exhausting the exploration
of all possible combinations.
Below, we present some of the properties of the proposed
method MCER:
Lemma 4 MCER does not generate the same combination
of plans more than once.
Proof outline:
This is ensured by keeping track of the
Algorithm 3 ExpandMostPromising
1: INPUT :: A set of valid plan sets S to expand, Children,
a distance measure dist(), the minimum distance needed between any two plans of a set min dist, the size of the diverse
plan set K, and the number of plan sets to be explored n.
2: OUTPUT :: Populates Children with new valid plan sets,
returns a diverse plan set of size K if found.
3: T emp ← φ (empty set);
4: for n times do
5:
P ← most promising plan set from S;
6:
for each candidate plan in the stream from sequence number
i = Pexp + 1 to the latest do
7:
if dist(p, l) > min dist ∀l ∈ P then
0
8:
P 0 ← P + {p}; Pexp
← i;
9:
if |P 0 | = K then
10:
return P 0 ;
11:
end if
12:
Children ← Children∪P 0 ;
13:
end if
14:
Pexp ← i;
15:
end for
16:
T emp ← T emp∪P ;
17: end for
18: G ← G∪T emp;
sequence number of candidate plan from the last child
generation attempt while expanding a plan set P via Pexp ,
which increases by 1 at each step during expansion (see
Line 14 in Algorithm 3) and the child generation attempts
start from Pexp + 1 every time (see Line 6 in Algorithm 3),
thereby avoiding repetition.
2
Lemma 5 MCER expands at-most n × (K − 1) + 1 number
of plan sets in each execution.
Proof outline: Note that, after expansion of n most promising nodes from G, their n most promising children, and then
their n most promising children and so on are expanded,
until a child of size K is found. Further, size of the children
at each step increases by 1 since a new candidate plan gets
added to the plan set. Therefore, even if we assume that the
initial set of seed nodes are all of size 1, MCER executes
at-most K steps at which point a diverse set of size K will
be found if possible through that set. And at each step,
at-most n number of children are expanded, with only 1 at
level K. Hence, together, at-most n × (K − 1) + 1 number
of plan sets are expanded in each execution of MCER. 2
Lemma 6 MCER guarantees finding a diverse set of plans
of size K if there exists one.
Proof outline: Note that, while we execute MCER several
times with incoming plans from the stream of candidate
plans, each time without exhausting all possible combinations, we keep track of the last expansion attempt for
each node (plan set), and store them in G. Hence all plan
sets which may not have been exhaustively explored with
the candidate plans are present in G when the entire set
of candidate plans has been generated. These plan sets are
then exhaustively explored without re-inserting back in to G
thereby guaranteeing completeness and termination.
2
Now, given a planning problem, a cost metric, a distance
measure, max cost, min dist, and K, for finding a set of
K cost sensitive diverse plans, one could use any one of the
following four combinations: 1) DFA with ACER, wherein
the DFA is executed and whenever a valid plan with cost
< max cost is found, ACER is invoked to find a diverse
set, and then the execution of DFA is continued if a diverse
set with the given requirements is not found, and the process is repeated until termination. We call this combination
DFAA. 2) DFA with MCER, similar to the above strategy of
invoking MCER whenever DFA find a valid cost sensitive
plan, followed by repeated calls to MCER at the end to explore all the remaining plan combinations until termination.
This is denoted by DFAM. 3) A*A with ACER (denoted
by A*AA), and 4) A*A with MCER (denoted by A*AM).
Next section presents the comparison of performances of the
above combinations of methods.
Experimental Results
In this section, we present the experimental results comparing the performances of various proposed algorithms among
themselves as well as with a greedy approach proposed in
the literature. We have implemented all our methods on
top of the Fast Downward planning environment (Helmert
2006), and hence could run problem instances from any of
the supported planning domains. Accordingly, we have conducted experiments on several domains, including, blocks,
rovers, pathways-noneg, airport, driverlog, tpp, zenotravel.
We present the representative results in this paper. All the experiments have been performed on a machine with Intel(R)
Xeon(R) CPU E5-1620 v2 at 3.70GHz and 64GB RAM. The
following distance measure for measuring diversity has been
adopted from (Nguyen et al. 2012):
dist(p1 , p2 ) = 1 −
A(p1 )∩A(p2 )
A(p1 )∪A(p2 )
(2)
where A(p) denotes the set of all actions in plan p.
Table 1 shows the comparison of DFAA and A*AA methods on problems (denoted by P.no.) from Blocks domain.
We have used the LM cut heuristic which is admissible, to
guide the search. The algorithms are given a maximum time
of 60sec for solving each problem. Given a set of inputs,
the output shows whether a diverse set of plans of size K is
found (otherwise the size of the largest diverse set found in
parenthesis), the time taken, and the number of plans generated during the process. * denotes that the algorithm stopped
due to the time limit. We see that the DFA based method
generates the cost sensitive plans faster than the A*A based
method in this case, resulting in the processing of more number of plans in a given time.
The difference in the number of plans generated to find
a diverse set of same size highlights the importance of the
order in which the candidate plans are generated. Depending on the order of the plans generated, the number of plans
required to be processed by an exhaustive algorithm to produce a diverse set of specific size varies. As mentioned before, this could be influenced by devising an appropriate distance metric and domain dependent feedback mechanism.
Table 1: Comparison of DFAA and A*AA complete algorithms. Domain: Blocks. max time = 60sec.
Input
P. no.
4-0
5-0
K
max cost
4
8
20
8
30
8
30
DFAA
min dist
0.6
0.5
0.6
0.5
0.6
K-set
found?
Yes
No (4)
Yes
No (5)
No* (4)
No* (3)
A*AA
Time (Sec.)
Plans gentd.
0.00
0.00
32.90
2.14
60.00
60.00
22
43
231
323
2567
5140
K-set
found?
Yes
No (4)
Yes
No (5)
No* (6)
No* (3)
Time (Sec.)
Plans gentd.
0.00
0.00
11.06
3.42
60.00
60.00
26
43
130
323
923
4115
Table 2: Comparison of DFAM and A*AM complete algorithms. Domain: Blocks. max time = 60sec.
Input
P. no.
4-0
5-0
DFAM
K
max cost
min dist
4
8
20
0.6
8
30
8
30
0.5
0.6
0.5
0.6
K-set
found?
Yes
No (4)
Yes
No (5)
No* (6)
No* (2)
A*AM
Time (Sec.)
Plans gentd.
0.00
0.00
0.58
1.74
60.00
60.00
26
43
323
323
11680
11908
K-set
found?
Yes
No (4)
Yes
No (5)
No* (7)
No* (3)
Time (Sec.)
Plans gentd.
0.00
0.00
0.04
2.62
60.00
60.00
26
43
172
323
12226
12311
Table 3: Comparison of DFA based and A*A based greedy algorithms. Domain: Blocks. max time = 60sec.
Input
P. no.
4-0
5-0
DFAG
K
max cost
min dist
4
8
20
0.6
8
30
8
30
0.5
0.6
0.5
0.6
K-set
found?
No (3)
No (3)
No (6)
No (4)
No (6)
No (2)
A*AG
Time (Sec.)
Plans gentd.
0.00
0.00
0.04
0.02
16.70
24.24
43
43
323
323
104712
104712
Table 2 presents the comparison of DFAM and A*AM
methods (with plan-combinations seed set size equal to 30
in each execution). Note that, both algorithms guarantee to
find a diverse set of required size if there exists one, given
they are given enough time to terminate. Our objective with
the MCER based methods is to quickly process the incoming
candidate plans so as to find a diverse set quicker, postponing the exhaustive exploration to the end. Accordingly, we
see that both the methods perform much better than they did
compared to Table 1 by processing larger number of plans.
They are able to find larger sized sets of diverse plans in the
given time than before, although, as one can observe it may
also happen that the select exploration could occasionally
(see DFAM vs DFAA in last rows of both the tables) delay
finding large sets compared to ACER based approaches.
Next, we present the results obtained by integrating the
greedy approach discussed in the Introduction with DFA and
A*A, in Table 3. We call these methods DFAG and A*AG
respectively. As one can observe, while the greedy methods
process the incoming candidate plans very fast, they terminate without finding a diverse set of given size even when
there exists one. Furthermore, even for finding the diverse
sets that they produced, they involve generating far more
number of plans compared to the complete algorithms. This
can be a crucial element when finding multiple plans is difficult for a domain. Also, note that, A*A runs out of memory (4GB per instance) in this case which makes the case
K-set
found?
No (3)
No (3)
No (7)
No (3)
No* (6)
No* (2)
Time (Sec.)
Plans gentd.
0.00
0.00
0.06
0.04
Mem-limit
Mem-limit
43
43
323
323
101908
101908
for memory bounded methods while attempting to generate multiple solutions. Although, one can improve the performance of the greedy approach through feedback mechanisms, considering only one seed plan set for exploration is
likely to continue to affect the performance. Thus, it would
be beneficial to have multiple seed plan sets to be explored
at each stage for better performance.
Now, we present the results obtained on two other domains, namely, Rovers and Zeno-Travel. We show the results with DFA as the base method (for generating all costbounded solutions) in these cases since A*A based methods
were quickly reaching the memory limit on these instances.
Table 4 shows the comparison of DFAA, DFAM and DFAG
methods on a problem from the Rovers domain with 14 objects. Here, a diverse set of size 8 with cost bound 20 is to
be found within 60 seconds. Three sets of results comparing the above three algorithms are presented with different
diversity criterion in each case. Note that, amongst the three
methods, DFAA spends the most amount of effort on exploring plan combinations (exhaustive) whenever a new plan is
found, therefore is only able to generate and process a small
number of plans. Since DFAG spends least amount of effort on exploring plan combinations (greedy) upon finding
a new plan, it is able to generate and scan through a large
number of plans. Whereas DFAM distributes its effort intelligently across plan generation and plan combination exploration, by adjusting the number of seeds n as per domain and
Table 4: Comparison of DFAA, DFAM and DFAG methods. Domain: Rovers. Problem: roverprob4213 (14 objects), K: 8,
max cost : 20, max time = 60sec.
Input
min dist
0.4
0.5
0.6
DFAA
K-set
found?
Yes
No* (6)
No* (4)
DFAM
Time (Sec.)
Plans gentd.
0.88
60.00
60.00
64
372
1048
K-set
found?
Yes
Yes
No* (6)
DFAG
Time (Sec.)
Plans gentd.
0.00
9.84
60.00
65
306061
2047871
K-set
found?
Yes
Yes
No* (4)
Time (Sec.)
Plans gentd.
0.00
1.22
60.00
64
304553
15988265
Table 5: Comparison of DFAA, DFAM and DFAG methods. Domain: Zeno-Travel. Problem: ZTRAVEL-2-5 (17 objects), K: 8,
max cost : 15, max time = 60sec.
Input
min dist
0.4
0.5
0.6
DFAA
K-set
found?
No* (6)
No* (4)
No* (3)
DFAM
Time (Sec.)
Plans gentd.
60.00
60.00
60.00
294
579
1171
K-set
found?
Yes
Yes
Yes
problem size (in this case, n = 30). Note that, MCER with
n = 1 would result in an exploration similar to that of the
greedy method, with the exception of going further and guaranteeing completeness. And, MCER with n = ∞ would result in an exploration similar to that of ACER. Results show
that DFAA performs poorly on large instances due to its exhaustive exploration. Between DFAM and DFAG, on easier
problems (with low diversity/distance requirement; first 2 instances), greedy and MCER based methods fare similarly,
with the greedy method slightly outperforming the MCER
based method (note that, one can change the n value to 1
here, to make MCER deliver results similar to that of the
greedy method, however, this is not beneficial in general).
On the other hand, when the diversity required is higher
(third instance), MCER based method outperforms greedy
approach by finding a larger diverse set using only 12.81%
of the plans generated by that of the greedy method, showcasing the advantage of exploring plan combinations more
thoroughly.
Table 5 presents the comparison of DFAA, DFAM and
DFAG methods on a problem from the Zeno-Travel domain
with 17 objects. Once again, we observe similar results as
that of the previous two domains. ACER based method fares
poorly due to its exhaustive nature which limits its reach
in scanning through the full space plans in the given time.
And, between DFAM and DFAG, while DFAG may find
the K-set in shorter time in some cases, DFAM continues
to leverage the advantage of exploring plan combinations
thoroughly and is able to find required K-sets using lesser
number of plans. This is a crucial element in working with
domains where producing individual plans itself is very difficult, which is especially the case when large problem sizes
are involved.
Before we conclude, we present a note on solving large
sized problems. In such cases, while completeness may not
be a practical expectation, one should be able to gain performance over using the greedy approach by carefully integrating the proposed MCER approach with the state-of-the-art
solvers/planners, feedback mechanisms, and using efficient
heuristics for exploring the space of plan combinations. Fur-
DFAG
Time (Sec.)
Plans gentd.
0.18
0.62
21.46
1447
7884
505186
K-set
found?
Yes
Yes
Yes
Time (Sec.)
Plans gentd.
0.20
0.44
10.30
1447
8545
619579
thermore, the proposed methods can be easily extended to
solve related problems such as, finding a K-set with maximum diversity, finding largest K-set with a given diversity,
finding high quality (in terms of the cost of the plans) K-sets
with given diversity, and a combination thereof involving the
generation of multi-objective pareto fronts.
Conclusion
In this paper, we take a combinatorial search perspective of
the widely studied diverse solution generation problem. We
observe that many of the approaches proposed in various
domains such as automated planning and constraint satisfaction use a linear-time greedy method for exploring plan
set combinations, that makes them fail while searching for
a diverse set of required size even when there exists one.
We propose a bi-level optimization framework and methods
to find cost-sensitive diverse solutions which guarantee to
find a diverse set of required size whenever there exists one.
We identify the critical elements that affect the performance
in such scenarios and propose efficient methods to handle
them. We showcased the efficacy of the proposed methods
by implementing our methods as part of the Fast Downward
planning system and comparing with the existing greedy approach across various domains. The proposed methods have
found larger sets of diverse solutions compared to the greedy
approach on almost all problem instances, within the same
time bound, proving their utility.
Acknowledgments
This research is supported in part by the ONR grants
N00014-13-1-0176, N00014-13-1-0519 and N00014-15-12027, and the ARO grant W911NF-13- 1-0023.
References
Alexiadis, A., and Refanidis, I. 2013. Generating alternative plans
for scheduling personal activities. In Proceedings of the Seventh
Scheduling and Planning Applications workshop, 35–40.
Bloem, M., and Bambos, N. 2014. Air traffic control area configuration advisories from near-optimal distinct paths. Journal of
Aerospace Information Systems 11(11):764–784.
Bloem, M. J. 2015. Optimization and Analytics for Air Traffic
Management. Ph.D. Dissertation, Stanford University.
Boddy, M. S.; Gohde, J.; Haigh, T.; and Harp, S. A. 2005. Course
of action generation for cyber security using classical planning.
In Proceedings of the Fifteenth International Conference on Automated Planning and Scheduling (ICAPS 2005), June 5-10 2005,
Monterey, California, USA, 12–21.
Bryce, D. 2014. Landmark-based plan distance measures for diverse planning. In Proceedings of the Twenty-Fourth International
Conference on Automated Planning and Scheduling, ICAPS 2014,
Portsmouth, New Hampshire, USA, June 21-26, 2014.
Bylander, T. 1991. Complexity results for planning. In Proceedings
of the 12th International Joint Conference on Artificial Intelligence
- Volume 1, IJCAI’91, 274–279. San Francisco, CA, USA: Morgan
Kaufmann Publishers Inc.
Coman, A., and Muñoz-Avila, H. 2011. Generating diverse plans
using quantitative and qualitative plan distance metrics. In Proceedings of the Twenty-Fifth AAAI Conference on Artificial Intelligence, AAAI 2011, San Francisco, California, USA, August 7-11,
2011.
Coman, A., and Muñoz-Avila, H. 2012a. Diverse plan generation
by plan adaptation and by first-principles planning: A comparative
study. In Case-Based Reasoning Research and Development - 20th
International Conference, ICCBR 2012, Lyon, France, September
3-6, 2012. Proceedings, 32–46.
Coman, A., and Muñoz-Avila, H. 2012b. Plan-based character
diversity. In Proceedings of the Eighth AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment, AIIDE-12,
Stanford, California, October 8-12, 2012.
Coman, A., and Muñoz-Avila, H. 2013. Automated generation of
diverse npc-controlling fsms using nondeterministic planning techniques. In Proceedings of the Ninth AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment, AIIDE-13,
Boston, Massachusetts, USA, October 14-18, 2013.
Coman, A. 2012. Solution diversity in planning. In Proceedings of
the Twenty-Sixth AAAI Conference on Artificial Intelligence, July
22-26, 2012, Toronto, Ontario, Canada.
Dechter, R.; Flerova, N.; and Marinescu, R. 2012. Search algorithms for m best solutions for graphical models. In Proceedings of
the Twenty-Sixth AAAI Conference on Artificial Intelligence, July
22-26, 2012, Toronto, Ontario, Canada.
Do, M. B., and Kambhampati, S. 2001. Planning as constraint
satisfaction: Solving the planning graph by compiling it into CSP.
Artif. Intell. 132(2):151–182.
Eiter, T.; Erdem, E.; Erdogan, H.; and Fink, M. 2013. Finding
similar/diverse solutions in answer set programming. Theory and
Practice of Logic Programming 13(03):303–359.
Gerevini, A.; Saetti, A.; and Serina, I. 2003. Planning through
stochastic local search and temporal action graphs in lpg. J. Artif.
Int. Res. 20(1):239–290.
Goldman, R. P., and Kuter, U. 2015. Measuring plan diversity:
Pathologies in existing approaches and A new plan distance metric. In Proceedings of the Twenty-Ninth AAAI Conference on Artificial Intelligence, January 25-30, 2015, Austin, Texas, USA., 3275–
3282.
Hebrard, E.; Hnich, B.; O’Sullivan, B.; and Walsh, T. 2005. Finding diverse and similar solutions in constraint programming. In
Proceedings of the 20th National Conference on Artificial Intelligence - Volume 1, AAAI’05, 372–377. AAAI Press.
Hebrard, E.; O’Sullivan, B.; and Walsh, T. 2007. Distance constraints in constraint satisfaction. In Proceedings of the 20th In-
ternational Joint Conference on Artifical Intelligence, IJCAI’07,
106–111. San Francisco, CA, USA: Morgan Kaufmann Publishers
Inc.
Helmert, M. 2006. The fast downward planning system. J. Artif.
Intell. Res. (JAIR) 26:191–246.
Kambhampati, S. 2007. Model-lite planning for the web age
masses: The challenges of planning with incomplete and evolving domain models. In Proceedings of the Twenty-Second AAAI
Conference on Artificial Intelligence, July 22-26, 2007, Vancouver,
British Columbia, Canada, 1601–1605.
Lawler, E. L., and Wood, D. E. 1966. Branch-and-bound methods:
A survey. Operations Research 14(4):699–719.
Myers, K. L., and Lee, T. J. 1999. Generating qualitatively different
plans through metatheoretic biases. In AAAI, 570–576. American
Association for Artificial Intelligence.
Nadel, A. 2011. Generating diverse solutions in sat. In Proceedings of the 14th International Conference on Theory and Application of Satisfiability Testing, SAT’11, 287–301. Berlin, Heidelberg:
Springer-Verlag.
Nguyen, T. A.; Do, M. B.; Gerevini, A.; Serina, I.; Srivastava, B.;
and Kambhampati, S. 2012. Generating diverse plans to handle
unknown and partially known user preferences. Artif. Intell. 190:1–
31.
Petit, T., and Trapp, A. C. 2015. Finding diverse solutions of
high quality to constraint optimization problems. In IJCAI. International Joint Conference on Artificial Intelligence.
Roberts, M.; Howe, A.; Ray, I.; and Urbanska, M. 2012. Using
planning for a personalized security agent. In AAAI Workshops.
Roberts, M.; Howe, A. E.; and Ray, I. 2014. Evaluating diversity
in classical planning. In Proceedings of the Twenty-Fourth International Conference on Automated Planning and Scheduling, ICAPS
2014, Portsmouth, New Hampshire, USA, June 21-26, 2014.
Russell, S., and Norvig, P. 1995. Artificial intelligence: a modern
approach. Prentice Hall.
Rymon, R. 1992. Search through systematic set enumeration. Technical Reports (CIS) 297.
Scala, E. 2014. Plan repair for resource constrained tasks via numeric macro actions. In Proceedings of the Twenty-Fourth International Conference on Automated Planning and Scheduling, ICAPS
2014, Portsmouth, New Hampshire, USA, June 21-26, 2014.
Srivastava, B.; Nguyen, T. A.; Gerevini, A.; Kambhampati, S.; Do,
M. B.; and Serina, I. 2007. Domain independent approaches for
finding diverse plans. In IJCAI 2007, Proceedings of the 20th International Joint Conference on Artificial Intelligence, Hyderabad,
India, January 6-12, 2007, 2016–2022.
Vadlamudi, S. G.; Aine, S.; and Chakrabarti, P. P. 2013. Anytime
pack heuristic search. In Pattern Recognition and Machine Intelligence - 5th International Conference, PReMI 2013, Kolkata, India,
December 10-14, 2013. Proceedings, 628–634.
Vadlamudi, S.; Aine, S.; and Chakrabarti, P. 2015. Anytime pack
search. Natural Computing 1–20.
Vadlamudi, S. G.; Chakrabarti, P. P.; and Sarkar, S. 2012. Anytime
algorithms for mining groups with maximum coverage. In Tenth
Australasian Data Mining Conference, AusDM 2012, Sydney, Australia, December 5-7, 2012, 209–220.
Voss, C.; Moll, M.; and Kavraki, L. E. 2015. A heuristic approach
to finding diverse short paths. In IEEE International Conference
on Robotics and Automation, ICRA 2015, Seattle, WA, USA, 26-30
May, 2015, 4173–4179.
 0
0
advertisement
Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users