Lecture 2: Inverse Crimes, Model Discrepacy and Statistical Error Modeling Erkki Somersalo
advertisement

Lecture 2: Inverse Crimes, Model Discrepacy
and Statistical Error Modeling
Erkki Somersalo
Case Western Reserve University
Cleveland, OH
Dynamic model
Forward model
dx
= f (t, x, θ),
dt
x(0) = x0 ,
I
x = x(t) ∈ Rn is the state vector,
I
θ ∈ Rk is the unknown, or poorly known parameter vector,
I
f : R × Rn × Rk → Rn is the model function
I
x0 possibly unknown, or poorly unknown initial value.
(1)
Observation model
Data: discrete noisy observations, may depend on the parameter
vector:
bj = g (x(tj ), θ) + nj ,
t1 < t2 < . . . ,
I
g : Rn × Rk → R is the observation function
I
nj is the observation noise
The inverse problem: Estimate the state vector and the
parameter vector, (x(t), θ), based on the observations.
(2)
Two motivational problem
The dynamical system of acetate metabolism in brain by PET scan
data:
dm1
(t) = K1 c(t) − (k2 + k3 )m1 (t)
dt
dm2
(t) = k3 m1 (t) − k5 m2 (t)
dt
Observation: Noisy measurements of
c(tj ),
m(tj ) = V0 c(tj ) + m1 (tj ) + m2 (tj ).
Blood
Precursor
Product
k3
K1
[1-11C]acetate
[1-11C]acetate
[1-11C]O2
k2
k5
[1-11C]O2
[1-11C]O2
Astrocyte
+Neuron
Astrocyte
m1
Astrocyte
m2
HIV-1 strain competition assay
HIV-1 strain competition assay
Ċ
˙
CAe
˙
CAi
˙
CBe
˙
CBi
˙
CABe
˙
CABi
V˙A
V˙B
C˙0
=
=
=
=
=
=
=
=
=
=
λC0 T − (kA VA + kB VB + ηkA kB VA VB )C
kA VA C − kB VB CAe − rCAe
rCAe − δA CAi
kB VB C − kA VA CBe − rCBe
rCBe − δB CBi
ηkA kB VA VB C + kA VA CBe + kB VB CAe − rCABe
rCABe − δAB CABi
pA CAi + pAD CABi − cVA
pB CBi + pBD CABi − cVB
−λC0 T ,
Metabolic pathway of skeletal muscle
PCr Glu ATP ADP ADP G6P ATP Gly ATP ATP Cr ADP ADP GA3P NAD TGL NADH ADP BPG GLC ATP ATP FFA ADP Pyr Ala NADH ADP ATP NAD NAD FAC NADH Lac ACoA NAD NADH ATP OAA ADP Cit NAD NADH NADH NAD Mal O2 AKG NAD NADH NADH ADP NAD NAD Suc SCoA NADH CO2 ATP ADP AMP ATP H2O ATP ADP ATP The discrete time Markov models framework
Evolution model:
Xj+1 = F (Xj , θ) + Vj+1 ,
I
F is a known propagation model
I
Vj+1 is an innovation process
I
θ is a parameter: assumed known now, later to be estimated.
The observation model
Yj = G (Xj ) + Wj ,
the observation noise Wj independent of Xj .
Update scheme for posterior densities given accumulated data:
π(xj | Dj ) −→ π(xj+1 | Dj ) −→ π(xj+1 | Dj+1 )
Bayesian filtering
1. Propagation step: Chapman-Kolmogorov formula
Z
π(xj+1 | Dj ) =
π(xj+1 | xj , Dj )π(xj | Dj )dxj
Z
=
π(xj+1 | xj )π(xj | Dj )dxj ,
2. Analysis step: Bayes’ formula conditional on Dj
π(xj+1 | Dj+1 ) = π(xj+1 | yj+1 , Dj )
∝ π(yj+1 | xj+1 , Dj )π(xj+1 | Dj )
= π(yj+1 | xj+1 )π(xj+1 | Dj ),
Combining:
Z
π(xj+1 | Dj+1 ) ∝ π(yj+1 | xj+1 )
π(xj+1 | xj )π(xj | Dj )dxj .
Bayesian filtering
Assume that the current distribution is represented in terms of a
sample
Sj = (xj1 , wj1 ), (xj2 , wj2 ), . . . , (xjN , wjN ) .
The particle version (Monte Carlo integration):
Z
π(xj+1 | Dj+1 ) ∝ π(yj+1 | xj+1 ) π(xj+1 | xj )π(xj | Dj )dxj
is approximated by
π(xj+1 | Dj+1 ) ∝ π(yj+1 | xj+1 )
N
X
n=1
wjn π(xj+1 | xjn ).
Example: Gaussian innovation and noise
Assuming the propagation model
Xj+1 = F (Xj ) + Vj+1 ,
Vj+1 ∼ N (0, Γj+1 ),
we have
π(xj+1
1
T −1
| xj ) ∝ exp − (xj+1 − F (xj )) Γj+1 (xj+1 − F (xj )) ,
2
Similarly, the observation model
Yj = G (Xj ) + Wj ,
Wj ∼ N (0, Σj )
gives the likelihood
1
π(yj | xj ) ∝ exp − (yj − G (xj ))T Σ−1
(y
−
G
(x
))
.
j
j
j
2
Sampling Importance Resampling (SIR)
Layered sampling: For n = 1, 2, . . . , N,
n
1. Draw a candidate particle xej+1
from π(xj+1 | xjn );
n = π(y
n );
ej+1
2. Compute the relative likelihood gj+1
j+1 | x
3. Resample with replacement from
1
1
2
2
N
N
ej+1
ej+1
ej+1
(e
xj+1 , w
), (e
xj+1
,w
), . . . , (e
xj+1
,w
) ,
where the probability weights are defined as
n
gj+1
n
ej+1
w
=P n .
gj+1
Sampling Importance Resampling (SIR)
Data thinning:
I
n
Most particles xej+1
may have vanishingly small likelihood.
I
Few candidate particles are sampled over and over: The new
sample consists mostly copies of few candidate particles.
I
The density is poorly sampled.
Improvement: Auxiliary particles
Before resampling, calculate an auxiliary predictor:
x nj+1 = F (xjn ).
We write
π(xj+1 | Dj+1 ) ∝
N
X
π(yj+1 | xj+1 )
wjn π(yj+1 | x nj+1 )
π(xj+1 | xjn ),
π(yj+1 | x nj+1 )
|
{z
}
n=1
n
=gj+1
n
is a predictor of how well the auxiliary particle
The quantity gj+1
would explain the data.
Survival of the Fittest (SOF)
Given the initial probability density π0 (x0 ),
1. Initialization: Draw the particle ensemble from π0 (x0 ):
S0 = (x01 , w01 ), (x02 , w02 ), . . . , (x0N , w0N ) ,
w01 = w02 = . . . = w0N =
1
.
N
Set j = 0.
2. Propagation: Compute the predictor:
x nj+1 = F (xjn ),
1 ≤ n ≤ N.
Survival of the Fittest (SOF)
3. Survival of the fittest: For each n:
(a) Compute the fitness weights
n
gj+1
= wjn π(yj+1 | x nj+1 ),
n
gj+1
n
gj+1
←P n ;
n gj+1
(b) Draw indices with replacement `n ∈ 1, 2, . . . , N using
probabilities
k
P{`n = k} = gj+1
;
(c) Reshuffle
xjn ← xj`n ,
n
x nj+1 ← x `j+1
,
1 ≤ n ≤ N.
Survival of the Fittest (SOF)
4. Innovation: For each n: Proliferate
n
n
xj+1
= x nj+1 + vj+1
.
5. Weight updating: For each n, compute
n
wj+1
=
n )
π(yj+1 | xj+1
π(yj+1 | x nj+1 )
,
n
wj+1
6. If j < T , increase j ← j + 1 and repeat.
n
wj+1
←P n .
n wj+1
Estimating parameters: Sequential Monte Carlo
For the discrete time model, the propagation (and possibly the
likelihood) may depend on the unknown θ,
xj+1 = F (xj , θ).
Monte Carlo integral for posterior update:
π(xj+1 , θ | Dj+1 ) ∝ π(yj+1 | xj+1 , θ)
Z
× π(xj+1 | xj , θ)π(xj | θ, Dj )π(θ | Dj )dxj ,
Sample update:
Sj → Sj+1 ,
N
Sj = (xjn , θjn , wjn ) n=1 .
where Sj is drawn from π(xj , θ | Dj ).
Auxiliary parameter particles
Given the current parameter sample,
(θj1 , wj1 ), (θj2 , wj2 ), . . . , (θjN , wjN ),
estimate the mean and covariance,
θj =
N
X
n=1
wjn θjn ,
Cj =
N
X
n=1
wjn θjn − θj
θjn − θj
T
.
Auxiliary parameter particles
Approximate the marginal probability density π(θ | Dj ) of θ by a
Gaussian mixture model,
π(θ | Dj ) ≈
N
X
n
wjn N θ | θj , s 2 Cj ,
n=1
for which we define the auxiliary particle by
n
θj = aθjn + (1 − a)θj ,
where a is a shrinkage factor, 0 < a < 1 and a2 + s 2 = 1 to avoid
artificial diffusion.
Auxiliary parameter particles
Left as an exercise:
)
( N
X
n
= θj ,
E
wjn N θ | θj , s 2 Cj
n=1
and
cov
( N
X
n=1
wjn N θ |
n
θ j , s 2 Cj
)
= Cj ,
Auxiliary parameter particles
Approximate
π(xj+1 , θ | Dj+1 )
∝
N
X
n
wjn π(yj+1 | xj+1 , θ)π(xj+1 | xjn , θ)N (θ | θj , s 2 Cj ),
n=1
which we write as
π(xj+1 , θ | Dj+1 ) ∝
N
X
n
wjn π(yj+1 | x nj+1 , θj )
|
{z
}
n=1
n
=gj+1
×
π(yj+1 | xj+1 , θ)
π(yj+1 |
n π(xj+1
x nj+1 , θj )
n
| xjn , θ)N (θ | θj , s 2 Cj ),
n
where the coefficient gj+1
is the fitness of the predictor
n
n
n
n
x nj+1 , θj = F (xj+1
, θj ), θj .
Survivial of the Fittest – Sequential Monte Carlo (SOF –
SMC)
1. Initialization: Draw the particle ensemble from π0 (x0 , θ):
S0 = (x01 , θ01 , w01 ), (x02 , θ02 , w02 ), . . . , (x0N , θ0N , w0N ) ,
1
w01 = w02 = . . . = w0N = .
N
Compute the parameter mean and covariance:
θ0 =
N
X
n=1
Set j = 0.
w0n θ0n ,
C0 =
N
X
n=1
T
w0n θ0n − θ0 θ0n − θ0 .
Survivial of the Fittest – Sequential Monte Carlo (SOF –
SMC)
2. Propagation: Shrink the parameters
n
θj = aθjn + (1 − a)θj ,
1 ≤ n ≤ N,
by a factor 0 < a < 1. Compute the state predictor:
n
x nj+1 = F (xjn , θj ),
1 ≤ n ≤ N.
Survivial of the Fittest – Sequential Monte Carlo (SOF –
SMC)
3. Survival of the fittest: For each n:
(a) Compute the fitness weights
n
n
gj+1
= wjn π(yj+1 | x nj+1 , θj ),
n
gj+1
n
gj+1
←P n ;
n gj+1
(b) Draw indices with replacement `n ∈ 1, 2, . . . , N using
k
probabilities P{`n = k} = gj+1
;
(c) Reshuffle
n
`n n
x nj+1 , θj ← x `j+1
, θj ,
n
x nj+1 ← x `j+1
,
1 ≤ n ≤ N.
Survivial of the Fittest – Sequential Monte Carlo (SOF –
SMC)
4. Proliferation: For each n:
(a) Proliferate the parameter by drawing
n
n
θj+1
∼ N θj , s 2 Cj , s 2 = 1 − a2 ;
(b) Repropagate and add innovation:
n
n
n
xj+1
= F (xjn , θj+1
) + vj+1
.
Survivial of the Fittest – Sequential Monte Carlo (SOF –
SMC)
5. Weight updating: For each n, compute
n
wj+1
=
n , θn )
π(yj+1 | xj+1
j+1
n
π(yj+1 | x nj+1 , θj )
,
n
wj+1
n
wj+1
←P n .
n wj+1
6. If j < T , update
θj+1 =
N
X
n
n
,
wj+1
θj+1
Cj+1 =
n=1
increase j ← j + 1 and repeat.
N
X
n=1
n
T
n
n
θj+1
−θj+1 θj+1
wj+1
−θj+1 ,
Propagation and innovation
The problem we are addressing assumes
dx
= f (t, x, θ),
dt
x(0) = x0 ,
while the discrete propagation is written as
xj+1 = F (xj , θ) + vj+1 .
Questions:
1. How do we propagate?
2. What is the innovation?
Propagation and innovation
Naive propagation scheme
xj+1 ≈ xj + ∆tF (xj , θ),
which is used for SDE schemes (Euler-Maruyama) has several
problems:
I
The systems are typically stiff, leading to prohibitively small
step size to guarantee stability
I
The innovation needs to be related to approximation error.
Propagation and innovation
A more sophisticated solution: Use a standard stiff solver such as
ode15s.
Error proportional to approximation accuracy.
Problem:
I
Variable time step: some particles require longer integaration
I
The slowest particle determines the propagation speed.
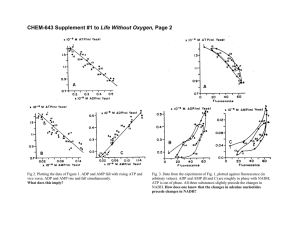
Histogram of propagation times: An example
2000
12000
10000
1500
8000
1000
6000
4000
500
2000
0
0
5
10
15
20
0
5
10
Distribution of propagation times, ∼ 18 000 particles.
15
Stiffness and syncronization
For systems which are inherently stiff, we use a good stiff solver:
xj+1 = F exact (xj , θ) = F (xj , θ) + approximation error,
where the approximation error is due to numerical integration.
If the stiffness of the systems varies a lot with the parameter values
prescribing a fixed accuracy may be a problems because
I
The time for the particles propagation may vary widely;
I
The slowest particle determines the propagation speed
I
We cannot take full advantage of parallel and vectorized
computing environment.
Linear Multistep Methods
Given r past values,
un , un+1 , . . . , un+r −1 ,
write
r
X
j=0
αj un+j = h
r
X
βj f (un+j , tn+j ),
j=0
and determine the coefficients αj , βj from a condition that the
formula is accurate for a polynomial.
I
Adams methods: αr = 1, αr −1 = −1, αj = 0 for j < r − 1.
I
Backwards Differentiation Formulas:
β0 = β1 = . . . = βr −1 = 0.
For stiff problems: AM1–AM4, BDF1 – BDF4.
Stability regions:Adams-Bashford (explicit)
AB1 (forward Euler)
AB3
7
7
0
0
−7
−6
0
−7
11 −6
0
11
Stability regions:Adams-Moulton (implicit)
AM1 (trapezoidal)
AM3
7
7
0
0
−7
−6
0
−7
11 −6
0
11
Stability regions: BDF (implicit)
BDF1 (backward Euler)
BDF2
7
7
0
0
−7
−6
0
−7
11 −6
0
11
Higher Order Method Error Control (HOMEC)
I
un+r = candidate solution at time tn+r computed by the
LMM of order p,
I
ubn+r = solution at tn+r given by the higher order method.
I
u = exact solution with initial value u(tn ) = un
un+r
= u(tn+r ) + `hp+1 + O(hp+2 )
ubn+r
= u(tn+r ) + O(hp+2 )
as h → 0, where ` is some vector depending on the solution u(t) of
the ODE system but not on h.
Subtracting and neglecting higher order terms:
`hp+1 ≈ un+r − ubn+r
Prescribe time, not accuracy
Thus, to improve the performance of the algorithm we
I
Propagate each particle with fixed propagation time.
I
Estimate the numerical accuracy for each particle
I
Set the jth particle innovation variance proportional to the
integration error.
This yields the innovation covariance matrix
Vj+1 ∼ N (0, Γj+1 ),
where for 1 ≤ i ≤ d,
Γj+1 = diag(γ) + εI,
with τ > 1.
γi = τ 2 (uj+1 − ubj+1 )2i ,
SOF with error estimate innovation
Given the initial probability density π0 (x0 ),
1. Initialization: Draw the particle ensemble from π0 (x0 ):
S0 = (x01 , w01 ), (x02 , w02 ), . . . , (x0N , w0N ) ,
w01 = w02 = . . . = w0N =
1
.
N
Set j = 0.
2. Propagation: Compute the predictor using LMM:
x nj+1 = Ψ(xjn , h),
1 ≤ n ≤ N.
3. Survival of the fittest: For each n:
(a) Compute the fitness weights
n
gj+1
= wjn π(yj+1 | x nj+1 ),
n
gj+1
n
gj+1
←P n ;
n gj+1
(b) Draw indices with replacement `n ∈ 1, 2, . . . , N using
probabilities
k
P{`n = k} = gj+1
;
(c) Reshuffle
xjn ← xj`n ,
n
x nj+1 ← x `j+1
,
1 ≤ n ≤ N.
4. Innovation: For each n:
(a) Using error estimate, estimate Γnj+1 = Γj+1 (xjn );
n
∼ N (0, Γnj+1 );
(b) Draw vj+1
(c) Proliferate
n
n
xj+1
= x nj+1 + vj+1
.
5. Weight updating: For each n, compute
n
wj+1
=
n )
π(yj+1 | xj+1
π(yj+1 | x nj+1 )
,
n
wj+1
n
wj+1
←P n .
n wj+1
6. If j < T , increase j ← j + 1 and repeat from (ii).
The parameter estimation SMC can be also carried out
concurrently.
Extensions to EnKF
Assuming that the current density π xj , θ | Dj is represented in
terms of an ensemble
n
o
1
2
N
Sj|j =
xj|j
, θj1 , xj|j
, θj2 , . . . , xj|j
, θjN
,
the state prediction ensemble is obtained by
n
n
n
, n = 1, 2, . . . , N
xj+1|j
= F xj|j
, θjn + vj+1
following the state evolution equation and setting the innovation
variance as for the particle filter.
Assume a linear observation model.
Combining state and parameter vectors
Compute the prediction ensemble statistics by defining the state
and parameter vectors
"
#
n
x
n
j+1|j
zj+1|j
=
,
n = 1, 2, . . . , N.
θjn
The prediction ensemble mean is
z j+1|j
N
1 X n
zj+1|j
=
N
n=1
and the prior covariance matrix is
N
Γj+1|j
T
1 X n
n
=
zj+1|j − z nj+1|j zj+1|j
− z nj+1|j
N −1
n=1
When an observation yj+1 arrives, an observation ensemble is
generated by parametric bootstrapping
n
n
yj+1
= yj+1 + wj+1
n ∼ N (0, D) is a realization of the noise. In the case of
where wj+1
a linear observation the combined posterior ensemble is obtained as
n
n
n
n
zj+1|j+1
= zj+1|j
+ Kj+1 yj+1
− Gj+1 zj+1|j
,
n = 1, 2, . . . , N
where the Kalman gain Kj+1 is
−1
T
+
D
Kj+1 = Γj+1|j GT
G
Γ
G
.
j+1
j+1|j j+1
j+1
The posterior means and covariances for the states and parameters
are computed using the posterior ensemble statistics.
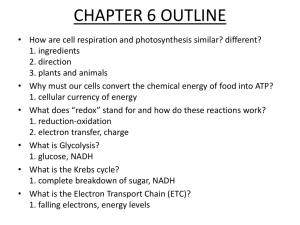
A simple example motivated by acetate metabolism
x1
x1 + k1
dx1
dt
= Φ(t) − V1
dx2
dt
= V1
x1
x2
− V2
x1 + k1
x2 + k2
dx3
dt
= V2
x2
− λ(x3 − c0 )
x2 + k2
with known parameters λ and c0 and input function
Φ(t) = A0 + A(t − t0 ) exp(−(t − t0 )/τ )
(3)
1.5
x1
x2
x3
1
0.5
0
0
5
10
15
20
25
30
Time series for V1
Time series for k1
1.6
0.14
1.4
0.12
1.2
0.1
1
0.08
0.8
0.06
5
10
15
20
25
30
0.04
5
10
Time series for V2
15
20
25
30
25
30
Time series for k2
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
5
0.4
10
15
20
25
30
5
10
15
20
Time series for V1
Time series for k1
2
0.25
1.5
0.2
1
0.15
0.5
0.1
0
5
10
15
20
25
30
0.05
5
10
Time series for V2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
5
10
15
20
15
20
25
30
25
30
Time series for k2
25
30
0.2
5
10
15
20
Time t = 5
Time t = 10
1.5
Time t = 15
0.15
1
0.6
0.14
0.58
x2
x2
x2
0.5
0.13
0
0.56
0.12
−0.5
−1
0.2
0.4
0.6
k2
0.8
0.11
0.2
1
0.4
0.8
0.54
0.4
1
0.165
0.135
0.135
0.155
x2
0.14
0.16
0.13
0.125
0.5
0.6
k2
0.7
0.8
0.12
0.45
0.6
k2
0.7
0.8
0.6
0.65
Time t = 30
0.14
0.15
0.4
0.5
Time t = 25
0.17
x2
x2
Time t = 20
0.6
k2
0.13
0.125
0.5
0.55
k2
0.6
0.65
0.12
0.45
0.5
0.55
k2
The humble and lowly skeletal muscle
and its metabolism
PCr Glu ATP ADP ADP G6P ATP Gly ATP ATP Cr ADP ADP GA3P NAD TGL NADH ADP BPG GLC ATP ATP FFA ADP Pyr Ala NADH ADP ATP NAD NAD FAC NADH Lac ACoA NAD NADH ATP OAA ADP Cit NAD NADH NADH NAD Mal O2 AKG NAD NADH NADH ADP NAD NAD Suc SCoA NADH ATP CO2 ATP ADP AMP ATP H2O ADP ATP Stiffness and many unknown parameters
Problem: follow the time courses of metabolites and intermediates
in skeletal model cellular metabolism model over 100 minutes.
I
State vector: 38 concentrations, 30 in tissue, 8 in blood;
I
Evolution model: nonlinear system of ODEs;
I
Number of unknown parameters: 44+52.
I
The stiffness of the underlying ODE system reflects the
difference in time constants of the different reactions and
transports.
Numerical test
I
Data: Noisy measurements of 8 concentrations in blood at 11
time instances.
I
Propagation: use implicit time integrators BDF2 (and BDF3)
with fixed time step h = 0.01 or 0.6 seconds.
I
Ensemble size: N=250.
I
Fix 44 parameters corresponding to facilitators and estimate
remaining 52 (max flux and affinity)
I
Initial ensemble: cloud of parameters values not centered
around true values and corresponding initial values which
support steady state.
I
At each time step we inflate the covariance matrix by 20%.
Spatio-temporal prior
I
We want to favor solutions with moderate rates of change.
I
Exponential a priori bound:
M −∆tj+1 C (tj ) ≤ C (tj+1 ) ≤ M ∆tj+1 C (tj )
for M > 1 and ∆tj+1 = tj+1 − tj , which implies
k log
I
C (tj+1 ) k = |x(tj+1 ) − x j|j | ≤ (log M)∆tj+1 .
C (tj )
We set
x(tj+1 ) ∼ N x j|j , γ 2 (∆tj+1 )2 Id )
with M = 20 and γ = log M/2.
Estimation of blind components
Lactate
Malate
1.1
0.105
concentration, [mmol/l]
concentration, [mmol/l]
0.1
1
0.9
0.8
0.095
0.09
0.085
0.08
0.075
0.7
0
20
40
60
time, [min]
80
100
0
20
ATP
100
80
100
0.08
6.2
concentration, [mmol/l]
concentration, [mmol/l]
80
NADH
6.22
6.18
6.16
6.14
6.12
0
40
60
time, [min]
0.075
0.07
0.065
0.06
0.055
20
40
60
time, [min]
80
100
0.05
0
20
40
60
time, [min]
Estimation of parameters
Vmax, Malate production
maximum reaction rate, [mmol/l/min]
maximum reaction rate, [mmol/l/min]
Vmax, ATP hydrolysis
8
7.9
7.8
7.7
7.6
7.5
7.4
0
20
40
60
time, [min]
80
100
2.2
2.15
2.1
2.05
2
1.95
0
0.057
0.056
0.055
0.054
0.053
0.052
0
20
40
60
time, [min]
80
20
40
60
time, [min]
80
100
Vmax, Pyruvate reduction
maximum reaction rate, [mmol/l/min]
maximum reaction rate, [mmol/l/min]
Vmax, Alanine production
100
0.54
0.53
0.52
0.51
0.5
0.49
0.48
0
20
40
60
time, [min]
80
100
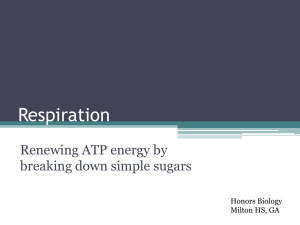
Predictive skill of the filter
Question: How well does a dynamical system identified by the
estimated parameters describe predict other protocols?
fading
ischemia
increasing
Q, [mL/min]
1.5
1
0.5
0
0
50
t, [min]
100
ATP
ATP
6.26
6.24
concentration, [mmol/l]
concentration, [mmol/l]
6.24
6.22
6.2
6.18
6.16
6.14
6.12
0
20
40
60
time, [min]
80
6.22
6.2
6.18
6.16
6.14
0
100
20
NADH
0.08
100
80
100
0.07
concentration, [mmol/l]
concentration, [mmol/l]
80
NADH
0.075
0.07
0.065
0.06
0.055
0.05
0
40
60
time, [min]
20
40
60
time, [min]
80
100
0.068
0.066
0.064
0.062
0.06
0
20
40
60
time, [min]
Lactate
1.6
1.4
1.4
concentration, [mmol/l]
concentration, [mmol/l]
Lactate
1.6
1.2
1
0.8
0
20
40
60
time, [min]
80
100
1.2
1
0.8
0
20
Pyruvate
0.1
100
80
100
0.09
concentration, [mmol/l]
concentration, [mmol/l]
80
Pyruvate
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0
40
60
time, [min]
20
40
60
time, [min]
80
100
0.08
0.07
0.06
0.05
0.04
0
20
40
60
time, [min]
References
I
Arnold A, Calvetti D, and Somersalo E (2013) Linear
multistep methods, particle filtering and sequential Monte
Carlo. Inverse Problems, 29(8), 085007.
I
Arnold A, Calvetti D, Gjedde A, Iversen P, and Somersalo E
(2014) Astrocyte tracer dynamics estimated from
[1 −11 C ]-acetate PET measuraments. Math. Med. Biol.
doi: 10.1093/imammb/dqu021.
I
Arnold A, Calvetti D, and Somersalo E (2014) Parameter
estimation for stiff deterministic dynamical systems via
Ensemble Kalman filter. Inverse Problems 30 : 105008.
References
I
Cotter SL, Roberts GO, Stuart AM and White D (2013).
MCMC methods for functions: modifying old algorithms to
make them faster. Statistical Science, 28, 424-446.
I
Liu J and West M 2001 Combined parameter and state
estimation in simulation-based filtering Sequential Monte
Carlo Methods in Practice eds A Doucet, J F G de Freitas and
N J Gordon (New York: Springer-Verlag) pp 197-223
I
Pitt M and Shephard N 1999 Filtering via simulation:
auxiliary particle filters J. Amer. Statist. Assoc. 94 590-599