A point process model for rainfall with truncated Gaussian rain cells
advertisement

A point process model for rainfall with
truncated Gaussian rain cells
By Paul J. Northrop, Tom M. Stone
A stochastic model for rainfall at a single point in space is studied in which storms
arrive in a Poisson process, each storm consisting of a cluster of a random number
of rain cells, each cell having random maximum intensity and duration. A common
feature of existing models of this kind is that the intensity of each rain cell is constant over its duration, thus forming a rectangular pulse of rainfall. In this paper
rain cells are given a more realistic structure in which their intensity increases after
birth and decreases before death. This enables better reproduction of rainfall properties at the short timescales required for some important hydrological applications.
The model is fitted to rainfall data from south west England.
Keywords: rainfall modelling; point processes; raingauge data
1. Introduction
Rainfall is the primary input for most hydrological systems and therefore models
of point rainfall time series have potential application to a range of hydrological
problems. For example, one approach to evaluating flood risk routes synthetic rainfall sequences generated from a rainfall model through a rainfall-runoff model to
obtain simulated flood responses (Wheater, 2002).
There is extensive literature on the use of Poisson cluster processes in the
stochastic modelling of rainfall, steming largely from Rodriguez-Iturbe et al. (1987).
The general structure of these models is motivated by observational studies such as
Austin & Houze (1972) and Petterssen (1956) which identified areas of relatively
intense rainfall, rain cells. These studies found that rain cells tend to cluster to
form larger structures which, for the purposes of this paper, we call storms.
Various extensions of Rodriguez-Iturbe et al. (1987) have been proposed. They
include: Rodriguez-Iturbe et al. (1988), in which cell durations are randomised
between storms in such a manner that storms have a common structure but occur
on different timescales; Cowpertwait (1994), in which there are two cells types
- short duration, high intensity cells and long duration, low intensity cells; and
Kakou (1997) in which rain cell intensity and duration are stochastically dependent,
producing a continuum of rain cell types.
A common feature of all these models is that rain cells are represented as rectangular pulses of rainfall. This structure is convenient mathematically but physically
unrealistic. Realizations generated from such models will have an unrealistic appearance at low levels of temporal aggregation and may have undue influence on
subsequent analyses. The properties of rainfall totals over short time periods may
be important in some applications, for example, a 15 minute time-step is commonly
used in the UK for flow forecasting purposes (Wood et al., 2000).
Research Report No.251, Department of Statistical Science, University College London
Date: March 2005
2
Paul J. Northrop, Tom M. Stone
The assumption of rectangular pulses is not supported by empirical studies of
rain cell structure (Willems, 2001) which suggest that rain cells have a spatialtemporal structure which can be represented adequately by a Gaussian density
function. In addition, it is unlikely that rain cell intensity and duration are independent. In fact, we might expect rain cell intensity and duration to be negatively
correlated - very intense cells tending to have short durations and cells with a long
duration tending to be relatively less intense.
In this paper we consider two closely-related generalizations of the rectangular
pulses model in which rain cells increase in intensity after their birth and then
dissipate before their death. In both cases each rain cell has the shape of a truncated
Gaussian density function. A parameter controls the rate of increase and decrease
of cell intensity. The rectangular pulses models may be recovered as a limiting case.
These rain cells are anticipated to have increased realism. The rain cells have the
property that the average intensity over the course of their lifetime is stochastically
dependent on their duration. For one of the cases the average intensity is negatively
related to the duration.
The aims of this paper are to derive expressions for the main properties of
the new model and to demonstrate, by fitting the model to rainfall data from the
HYREX (Moore et al., 2000) raingauge network in the catchment of the river Brue
in south west England, that the model is better able to reproduce properties of
sub-hourly rainfall data than the equivalent rectangular pulses model.
2. Bartlett-Lewis Gaussian Pulses Model (BLGPM)
(a) Specification of the model
We consider an extension of the Bartlett-Lewis Rectangular Pulses Model (BLRPM)
proposed by Rodriguez-Iturbe et al. (1987). Storm origins arrive in a Poisson process of rate λ. Each origin is followed by a Poisson process of rate β of cell origins.
After a time, exponentially distributed with rate γ, the process of cell origins terminates. With each cell origin (and with each storm origin) is associated a rain cell
that deposits rainfall at a rate which varies over time as specified in equation (2.1)
below. The rain cell deposits rainfall for a time D, its duration, and then it ‘dies’.
The durations of distinct rain cells are assumed to be exponentially distributed
random variables with parameter η, that is, with mean µD = 1/η. The intensity
X(s) of a rain cell of duration d a time s after its birth is given by
1
1 2
2
X(s) = X exp − 2 (s − d/2) − I exp − 2 d
,
2σ
8σ
0 < s < d,
(2.1)
where X is a random variable determining the peak intensity of the rain cell (attained midway through its duration) and σ determines the rate of increase in intensity to this peak and the rate of dissipation after the peak. The total intensity Y (t)
at time t is the sum of contributions from all cells alive at t. It is assumed that the
different peak intensities and durations are mutually independent and independent
of the process of cell origins. We consider two cases: I = 0 and I = 1. The latter
case has the property that X(0) = X(d) = 0, that is, the cell intensity is zero at its
birth and at its death. While this is obviously a physically appealing property we
Rainfall modelling
3
rainfall
intensity
x
d/2
d
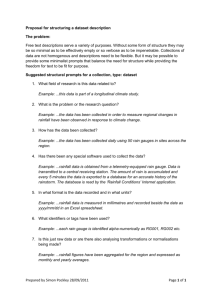
Figure 1. The form of a truncated Gaussian rain cell with a duration of d and a peak
intensity of x.
also consider the case I = 0, in which rectangular pulses are recovered in the limit
as σ tends to ∞. Figure 1 shows the structure of these cells.
The average rainfall intensity, over the duration d, of a rain cell of the form (2.1)
is given by
d
√
1 2
,
X(s) ds = X σ 2π [2Φ(d/2σ) − 1] /d − I exp − 2 d
(1/d)
8σ
0
where Φ(·) is the distribution function of a standard Gaussian random variable. For
I = 0 this quantity decreases with cell duration. For I = 1 this relationship is not
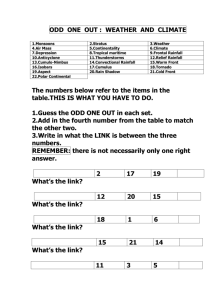
monotonic, with low average intensities for short and for long durations. Figure 2
illustrates how average rainfall intensity decays with cell duration in the two cases.
The two types, I = 0 and I = 1, of Gaussian rain cell differ substantially for short
durations only.
(b) Some properties of the model
We note that the generalization of rectangular cells to truncated Gaussian
cells does not affect the expressions for rainfall occurrence properties derived in
Rodriguez-Iturbe et al. (1987) and Onof & Wheater (1993). For example, the probability that an interval of length h hours is entirely dry is given by
h = exp −λ(h + µT ) + λG∗P (0, 0) γ + ηe−(β+γ)h /(β + γ) ,
where, defining κ = β/η and φ = γ/η,
G∗P (0, 0) = η −1 e−κ
0
1
tφ−1 (1 − t)eκt dt
time
Paul J. Northrop, Tom M. Stone
0.6
0.4
0.2
0.0
average cell intensity
0.8
1.0
4
0.0
0.5
1.0
1.5
cell duration (hours)
Figure 2. Average cell intensity against cell duration for a rain cell with a peak intensity
of 1 and σ = 1. Top: I = 0, bottom: I = 1.
and
µT = φη −1
1
dv
0
0
1
dt v−1 tφ−1 1 − (1 − vt) e−κv(1−t) + (φη)−1 .
The latter quantity is the expected time from the start of a storm until its last cell
dies, that is, the expected storm duration.
The mean and autocovariance of the BLGPM involve various normal integrals,
that is, integrals involving the density and/or distribution function of the standard
normal distribution. We can evaluate the required integrals using some of the normal integrals collected in Owen (1980). The relevant results are collected in the
appendix.
The rainfall intensity at time t is given by
t
Y (t) =
Xu (t − u) dN (u),
(2.2)
−∞
where Xu (t − u) is the (random) intensity of a pulse originating at time u, a time
t − u later and where {N (u)} counts occurrences in the process of rain cell origins.
Equation (2.2) sums the contributions to the rainfall intensity at time t from cells
Rainfall modelling
5
born before t. A cell born at time u(< t) contributes to the total rainfall intensity
at time t if its duration is greater than t − u. Therefore,
X(t − u) if D > t − u,
Xu (t − u) =
(2.3)
0
if D < t − u.
For the truncated Gaussian pulses considered here X(t − u) is given by (2.1).
It follows that
t
E {Xu (t − u)} E {dN (u)} ,
E {Y (t)} =
−∞
where the intensity E {dN (u)} of the process of cell occurrences is λµC and µC =
1 + β/γ is the mean number of cells per storm. In the current example,
E {Y (t)}
2
2
− Ie−l /8σ ηe−ηl dl du,
−∞ l=t−u
∞
∞
√
−ηl
−2σηz
= λµC µX σ 2π 2
Φ (l/2σ) ηe
dl − I 1 + 4ση
zφ(z)e
dz
,
0
0
√
2 2
2 2
1
= 2 2π λµC µX σ e2σ η Φ(−2ση) − 2σηI √ − 2σηe2σ η Φ(−2ση) ,
2π
= λµC µX
t
∞
e−(t−u−l/2)
2
/2σ2
where µX = E(X).
The autocovariance at lag τ is given by
c(τ ) =
=
cov {Y (t), Y (t + τ )}
t
Xu (t − u) dN (u),
cov
t
−∞
t+τ
=
−∞ −∞
∞ ∞
=
0
0
t+τ
−∞
Xv (t + τ − v) dN (v)
E {Xu (t − u)Xv (t + τ − v)} cov {dN (v), dN (u)} ,
E {Xt−w (w)Xt+τ−z (z)} cov {dN (t − w), dN (t + τ − z)}(2.4)
,
where the change of variables w = t − u, z = t + τ − v has been used. The covariance
density γ(u) = cov{dN (t), dN (t + u)} can be expressed (Cox & Isham, 1980) in
terms of the conditional intensity function h(·) for the point process of rain cell
origins as
γ(u) = λµC {δ(u) + h(u) − λµC } ,
where δ(·) is the Dirac delta function
1
δ(x) =
0
if x = 0,
if x =
0.
The conditional intensity function of the Bartlett-Lewis process considered here is
h(u) = λµC + βe−γ|u| .
6
Paul J. Northrop, Tom M. Stone
Therefore, γ(u) = λµC {δ(u) + β exp(−γ|u|)}. Substitution in (2.4) gives
∞ ∞
c(τ ) = λµC
E {Xt−w (w)Xt+τ−z (z)} δ(τ + w − z) + βe−γ|τ+w−z| dw dz,
0 ∞ 0
= λµC
E {Xt−w (w)Xt−w (w + τ )} dx
0
∞ ∞
E {Xt−w (w)Xt+τ−z (z)} e−γ|τ+w−z| dw dz,
+ λµC β
0
0
= cw (τ ) + cb (τ ).
The autocovariance c(τ ) is the sum of two terms, the first, cw (τ ), is a ‘within cell’
contribution resulting from the possibility that a single rain cell may live longer
than τ hours. The second term is a ‘between cell’ contribution resulting from the
possibility that two distinct cells in the same storm cover points separated by τ
hours in time.
The first term is given by
∞ ∞ 2
2
2
2
2
2
2
2
cw (τ ) = λµC E(X 2 )
e−(w−l/2) /2σ −Ie−l /8σ
e−(w+τ−l/2) /2σ − Ie−l /8σ ηe−ηl dldw,
0
w+τ
√
√
2 2
2
2
= 2 πλµC E(X 2 )σeσ η Φ(− 2ση)e−τ /4σ e−η|τ|
|τ |
|τ |+4σ 2 η
|τ |+4σ 2 η
2
2 2σ2 η 2
− 8πλµC E(X )σ ηe
I G −2ση − , 1,
−G 2ση, −1,
σ
2σ
2σ
2
2
√
√
|τ |+2σ η
|τ |+2σ η
2
σ2 η2
2
√
√
−(|τ |+2σ η) Φ −
,
+ 2 πλµC E(X )σηe
I σ 2φ
σ 2
σ 2
where the function G(·, ·, ·) is given in the appendix. The decay in the first term of
2
2
cw (τ ) with time lag τ is governed by two terms: e−τ /4σ and e−η|τ| . The former
corresponds to rapid decay in covariance due to changing cell intensity. Large values
of σ result in highly peaked cells and in rapid decay of autocovariance. The latter
corresponds to exponential decay due to cell death. Large values of η result in
(stochastically) long-lived cells and in rapid decay of the autocovariance.
The second term is given by
∞ ∞
E {Xt−w (w)Xt+τ−z (z)} e−γ|τ+w−z| dz dw,
cb (τ ) = λµC β
0
0
∞ ∞ ∞ ∞ 2
2
2
2
2
2
2
2
e−(w−l1 /2) /2σ −Ie−l /8σ
e−(z−l2 /2) /2σ −Ie−l /8σ
= λµC βµ2X
0
=
−
−
+
0
l1 =w l2 =z
×η 2 e−ηl1 e−ηl2 e−γ|τ+w−z| dl2 dl1 dz dw,
1 1
1 1
B e−γτ C1 −2ση,
,
, 2η +γ, 2η −γ +eγτ C2 −2ση,
,
, 2η −γ, 2η +γ
2σ 2σ
2σ 2σ
1
1
1
1
−γτ
γτ
e
C1 −2ση,
, − , 2η + γ, −γ − e C2 −2ση,
, − , 2η − γ, γ
2σ
2σ
2σ
2σ
1 1
1 1
−γτ
γτ
e
C1 −2ση, − ,
, γ, 2η − γ − e C2 −2ση, − ,
, −γ, 2η + γ
2σ 2σ
2σ 2σ
1
1
1
1
−γτ
γτ
e
C1 −2ση, − , − , γ, −γ + e C2 −2ση, − , − , −γ, γ
,
2σ
2σ
2σ
2σ
(2.5)
Rainfall modelling
where B = 8πλµC µ2X βσ 2 η 2 e4σ
2 2
η
∞
,
Φ (a + b1 w) e−cw
C1 (a, b1 , b2 , c, d) =
7
w=0
w+τ
Φ (a + b2 z) e−dz dz dw
z=0
and
∞
−cw
C2 (a, b1 , b2 , c, d) =
∞
Φ (a + b1 w) e
w=0
Φ (a + b2 z) e−dz dz dw.
z=w+τ
These integrals can be expressed in terms of the distribution functions of univariate and bivariate standard Gaussian random variables. The details and resulting
expressions are given in the appendix.
(c) Time aggregation
Rainfall data are often utilized in time aggregated form, for example in the form
of hourly rainfall totals. Therefore, we consider the cumulative rainfall totals
(h)
Yi
ih
=
Y (v) dv,
(i−1)h
in disjoint time intervals of fixed length h hours. The second-order properties of the
aggregated process are given by
(h)
E(Yi
(h)
var(Yi
)
= hE{Y (t)},
h
= 2
(h − τ )c(τ ) dτ,
)
(h)
(h)
cov(Yi , Yi+k )
0
h
=
−h
(h)
(2.6)
(h − |τ |) c(kh + τ ) dτ,
(h)
(h)
(h)
k = 1, 2, . . . .
(h)
(2.7)
We define ρ(h) (k) = corr(Yi , Yi+k ) = cov(Yi , Yi+k )/var(Yi ). For the BLGPM
it does not appear possible to evaluate the integrals in (2.6) or (2.7) algebraically.
Therefore, we evaluate them numerically using quadrature. For small h and k this
does not pose a problem. However, for large τ the covariance c(τ ) is difficult to
evaluate reliably because it involves quantities which are either too large or too
small to be stored accurately by a computer. Therefore, in cases where (2.6) and
(2.7) involves evaluating c(τ ) for large τ , we note that for τ >> 1/η, c(τ ) is very
(h)
closely approximated by a constant multiplied by exp(−γτ ). We obtain var(Yi )
as
z
h
(h)
var(Yi ) = 2
(h − τ )c(τ ) dτ + 2
(h − τ )c(τ ) dτ
0
≈
=
z
z
h
(h − τ )c(z) e−γ(τ−z) dτ
z
0 z
2
1
1
(h − τ )c(τ ) dτ + c(z) h − z − + e−γ(h−z) ,
2
γ
γ
γ
0
2
(h − τ )c(τ ) dτ + 2
8
Paul J. Northrop, Tom M. Stone
where z is chosen to be sufficiently large that c(τ ) ≈ c(z) exp{−γ(τ − z)}, yet sufficiently small that c(z) may be evaluated reliably. Similarly, using the approximation
c(kh + τ ) = c(r) exp{−γ(kh + τ − r)}, we obtain
(h)
(h)
cov(Yi , Yi+k )
z
=
−h
(h−|τ |) c(kh+τ ) dτ + g(r, z)
where
g(r, z) =
h − z − γ1 e−γz + γ1 e−γh
1 c(r)e−γ((k−1)h−r) h + z + 1 e−γ(h+z) − 2 e−γh + 1 e−2γh
γ
γ
γ
γ
1
−γ(kh−r)
γ c(r)e
The value of r is chosen so that c(kh + τ ) ≈ c(r) exp{−γ(kh + τ − r)} and c(r) can
be evaluated reliably. The value of z is chosen, subject to z ≥ −h, so that c(kh + z)
may be evaluated reliably.
3. Model fitting and validation
Rainfall models of this form are generally fitted using a generalised method of
moments approach in which the parameters of the model are chosen to reproduce
selected properties of the data as closely as possible. This may take the form of
selecting as many properties as parameters, seeking to reproduce all these properties
exactly, or selecting a larger number of properties and minimizing some measure of
the discrepancy between model and data, for example, a sum of (weighted) squared
differences. The properties chosen should not be strongly mutually correlated and
should have relatively small sampling variances. The fit of the model to the data
is judged by its ability to reproduce rainfall properties over a range of scales of
temporal aggregation, in particular those properties not used to fit the model.
This method has some drawbacks: the choice of fitting properties is subjective,
the resulting parameters estimates can be very sensitive to the properties chosen,
there may be quite different set of parameter estimates that give similar fits to the
data and inefficient use is made of the data. Nevertheless, if the fitting properties
are selected carefully, to provide information about the parameters of the model,
physically meaningful estimates are likely to be obtained. More formal methods
of fitting are possible. However, the physically appealing short-term dependencies
in the model make formulating a likelihood difficult. Chandler (1997) has developed a fitting method in which an approximate likelihood is constructed based on
the sample Fourier coefficients of the data rather than the data themselves. This
provides an objective fitting method and a means of comparing formally the fit of
different rainfall models. The method is, however, based entirely on the mean and
the second-order properties of the data and has been found to reproduce properties
relating to rainfall occurence poorly (Wheater et al., 2000).
Following Rodriguez-Iturbe et al. (1987) we approximate µT and G∗P (0, 0) using
expansions of the integrals involved, assuming that κ and φ are small. The resulting
apprximations are
1
1
µT ≈ (φη)−1 {1 + φ(κ + φ) − φ(κ + φ)(κ + 4φ) + φ(κ + φ)(4κ2 + 27κφ + 72φ2 )}
4
72
z > 0,
z < 0.
Rainfall modelling
9
λ
µC
µD
µL
µT
µX
σ
BLGPM0
0.043
11.71
0.51
1.64
3.34
2.57
0.035
BLGPM1
0.044
13.70
0.46
1.65
3.42
2.68
0.031
BLRPM
0.045
9.07
0.25
2.49
2.67
1.00
Table 1. Parameter estimates for models fitted to January Brue data. Line 1: BLGPM
with I = 0, line 2: BLGPM with I = 1, line 3: BLRPM.
and
G∗P (0, 0)
≈
−1
(φη)
3
1
1 − κ − φ + κφ + φ2 + κ2 − φ3 −
2
2
15
89
25
+φ4 + κφ3 + κ2 φ2 + κ3 φ +
8
72
72
7 2 11 2
1
κφ − κ φ − κ3
4
12
6
1 4
κ .
24
(a) Empirical results
We present results of fitting the BLGPM and BLRPM to data recorded by
raingauge 19 in the HYREX network, located at East Hill Lane Fields. The dataset
consists of 15 minute rainfall totals, recorded in millimetres, over a period from 10th
October 1993 to 30th September 1998. The tipping bucket mechanism of the gauge
limits the temporal resolution of the raingauge data. The median time between
bucket tips varies from approximately 6 minutes in the winter to approximately 11
minutes in the summer. Consequently, for aggregation periods of less than about 15
minutes, the data discretisation due to the tipping mechanism has a serious effect.
Clearly it is not appropriate to fit the model to the entire dataset as there will
be strong seasonal effects. Therefore, we separate the data into months and take the
month of January as an example. We assume that X is exponentially distributed.
The model fits reported in tables 1 and 2 are based on E(Y (1)), var(Y (1)), P (Y (1) =
0), ρ(1)(1), ρ(1) (3) and ρ(1/2)(1). The autocorrelations have been chosen to give information about the ‘temporal’ parameters µD , µL = 1/γ (the expected time for
which a storm is able to produce rain cells) and σ. The remaining properties give
information about λ, µC and µX . For the January data, and for other months not
presented here, the BLGPM (with either I = 0 or I = 1) is able to reproduce
the observed values of these statistics extremely closely. Therefore the exact form
of the objective function is unimportant. The BLRPM has only five parameters
and is unable to reproduce the six properties chosen exactly. We choose to reproduce E(Y (1) ), var(Y (1) ) and P (Y (1) = 0) exactly and use an (unweighted) sum of
squared differences for the remaining properties. Neither of these choices affects
the qualitative conclusions drawn. Table 1 contains the parameter estimates obtained under the two BLGPMs and the BLRPM. As we would expect the fitted
BLGPMs have rain cells which are, on average, longer-lasting and with a greater
peak intensity than the fitted BLRPM. This is illustrated in figure 3. The shape of
the Gaussian rain cells depends on the duration of the cell. For the BLRPM0 cells
of short duration have a large instantaneous change in intensity at their birth and
death, whereas BLGPM1 cells start and end at zero intensity. For sufficiently large
2.0
1.5
intensity
0.0
0.5
1.0
1.5
1.0
0.0
0.5
intensity
2.0
2.5
Paul J. Northrop, Tom M. Stone
2.5
10
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0
2
4
2.5
2.0
1.5
intensity
0.0
0.5
1.0
2.0
1.5
1.0
0.5
0.0
intensity
8
time / minutes
2.5
time / minutes
6
0
5
10
time / minutes
15
20
0
5
10
15
20
25
time / minutes
Figure 3. Fitted cell profiles under the BLGPM0 (———), the BLGPM1 (- - - - -) and the
BLRPM (− · − · − · −), for cell durations corresponding to to the 10th percentile (top left),
the 25th percentile (top right) the median (bottom left) and the mean (bottom right) of
the respective fitted distribution of cell duration.
durations (greater than the median cell duration, say) cells in the two BLGPMs
are very similar.
Table 2 summarises the fits of the BLGPM and the BLRPM. The crucial aspect
is the extent to which properties not used in the fitting procedure are reproduced.
Overall the BLGPMs are better able to reproduce sub-hourly properties than the
BLRPM. There is very little to choose between the BLGPMs. The autocorrelation
(h)
(h)
corr(Yi , Yi+k ) of the BLRPM decreases in h for fixed k whereas the autocorrelation of the BLGPM more closely follows the non-monotonic pattern of the observed
autocorrelations. For all three models there is close agreement between observed
and fitted probabilities of zero rainfall up to the 12 hour level of aggregation. The
proportion of dry days is underestimated by the models, to a slightly lesser extent
by the BLGPMs than the BLRPM. There is poor agreement between the models
and the data in autocorrelations at large levels h of temporal aggregation - the fitted
autocorrelations decay more quickly than the observed autocorrelations. However,
for large h the sample autocorrelation do not decay monotonically in h and in time
lag as would be expected. This is probably as result of the fact that sample prop-
30
Rainfall modelling
11
level of
aggregation
(h)
1/4
mean
(mm)
0.0256
variance
(mm2 )
0.0169
0.0165
0.0165
0.0141
autocorrelation
lag-1
lag-2
lag-3
probability
of zero rain
0.512
0.466
0.464
0.682
0.353
0.373
0.374
0.430
0.298
0.327
0.326
0.320
0.928
0.931
0.926
0.897
1/2
0.0513
0.0502
0.0484
0.0484
0.0475
0.525
0.525
0.525
0.553
0.337
0.388
0.387
0.321
0.254
0.288
0.287
0.245
0.897
0.879
0.877
0.877
3/4
0.0769
0.0963
0.0925
0.0926
0.0930
0.494
0.535
0.535
0.495
0.319
0.341
0.341
0.285
0.189
0.217
0.217
0.207
0.873
0.863
0.862
0.864
1
0.1025
0.1025
0.1025
0.1025
0.1475
0.1475
0.1475
0.1475
0.521
0.521
0.520
0.464
0.265
0.285
0.285
0.259
0.155
0.155
0.156
0.172
0.852
0.852
0.852
0.852
6
0.6152
2.1907
2.1902
2.1903
2.1175
0.274
0.161
0.162
0.208
0.155
0.028
0.028
0.018
0.176
0.001
0.001
0.002
0.650
0.686
0.684
0.679
12
1.2303
5.5712
5.0856
5.0889
5.1164
0.278
0.083
0.084
0.102
0.228
0.001
0.001
0.001
0.207
0.000
0.000
0.000
0.523
0.528
0.525
0.517
24
2.4606
15.7924
10.9137
10.9245
11.2743
0.282
0.052
0.052
0.047
0.251
0.000
0.000
0.000
0.303
0.000
0.000
0.000
0.394
0.313
0.310
0.300
Table 2. Assessment of models fitted to January Brue data (10th October 1993 to 30th
September 1998). Historical values and fitted values under the BLGPMs and the BLRPM.
Line 1: historical values, line 2: BLGPM0 , line 3: BLGPM1 , line 4: BLRPM. Entries in
bold indicate properties used to fit the model.
erties are relatively imprecise for large h. A lengthier data record is likely to have
produced the expected pattern in the autocorrelations.
4. Concluding remarks
Generalisation of the rectangular pulses of rainfall to truncated Gaussian form has
the desired effect of providing greater flexibility to reproduce short-term properties
of rainfall data. In addition the truncated Gaussian rain cells have greater physical
12
Paul J. Northrop, Tom M. Stone
realism than rectangular cells. The main drawback is the reduction in mathematical tractability which means that evaluation of (co)variances between rainfall totals
requires numerical integration. A potentially useful further generalisation is to incorporate truncated Gaussian cells into the random η BLRPM of Rodriguez-Iturbe
et al. (1988), which may further improve the ability of the model to reproduce the
properties of rainfall over a wide range of temporal scales, and the spatial-temporal
rainfall model of Northrop (1998). An alternative rain cell profile we considered
is X(s) = Xsσ (d − s)σ , for some positive parameter σ. However, this proved less
amenable to mathematical analysis than the Gaussian cell profiles.
Appendix A.
We express the various normal integrals appearing in the mean and autocovariance of the BLGPM in terms of univariate and bivariate Gaussian densities and
distribution functions.
The mean E{Y (t)} involves an integral of the form xφ(x)ecx dx. Integrating
by parts with u = ecx and dv = xφ(x) gives
xφ(x)ecx dx = −φ(x)ecx + φ(x)cecx dx
−φ(x)ecx + cec
=
2
/2
Φ(x − c),
where φ(x)cecx dx follows from equation 100,010 of Owen (1980).
The mean, cw (τ ) and cb (τ ) involve integrals of the form
∞
D(a, b, c) =
Φ(a + bx) c e−cx dx.
0
It follows directly from
1
1 2 2
Φ(bx)eax dx = eax Φ(bx) − ea /2b Φ(bx − a/b),
a
a
(Owen, 1980, equation 101,000) that
2
2
Φ(a + bx) c e−cx dx = −Φ(a + bx) e−cx + eca/b ec /2b Φ(a + bx + c/b).
Thus,
D(a, b, c) =
2
2
Φ(a) − eca/b ec /2b Φ(a + c/b) + eca/b ec
2
2
Φ(a) − eca/b ec /2b Φ(a + c/b)
2
/2b2
if b > 0
(A 1)
if b < 0.
Direct application of equations 10,010.1 and 10,010.8 of Owen (1980) gives
∞
a
a
b
G(a, b, c) =
−BvN √
,
Φ(a+bx)φ(x) dx = Φ √
, c; − √
1 + b2
1 + b2
1 + b2
c
where
BvN [h, k; ρ] =
2π
1
1 − ρ2
k
−∞
2
x − 2ρxy + y2
exp −
dx dy
2(1 − ρ2 )
−∞
h
Rainfall modelling
13
is the distribution function of a standard bivariate Gaussian distribution with correlation ρ. The function G(a, b, c) appears in cw (τ ) and cb (τ ).
If c + d = 0 the integrals C1 and C2 defined in section b can be expressed, using
(A 1), as
1 Φ(a)
e−dτ
C1 (a, b1 , b2 , c, d) =
D(a, b1 , c) −
F (a, a + b2 τ, b1 , b2 , c + d)
d
c
c+d
2
eda/b2 ed
+
c
and
e−dτ
C2 (a, b1 , b2 , c, d) =
c
/2b22
[F (a, a + b2 τ + d/b2, b1 , b2 , c) − Φ(a + d/b2 )D(a, b1 , c)]
1
1
Φ(a)D(a + b2 τ, b2 , d) −
F (a, a + b2 τ, b1 , b2 , c + d)
d
c+d
eca/b1 ec
+
d
2
/2b21
[F (a+c/b1 , a+b2 τ, b1 , b2 , d)−Φ(a+c/b1 )D(a+b2 τ, b2 , d)]
where
F (a1 , a2 , b1 , b2, c)
∞
=
0
Φ(a1 + b1 x)Φ(a2 + b2 x) c e−cx dx.
(A 2)
The only instances where c + d = 0 are in the last two terms of cb (τ ) in (2.5). In
both these cases b1 = b2 < 0. Therefore for these two terms we replace the second
terms in C1 and C2 by
−
e−dτ
J(a, a + bτ, b)
d
respectively, where,
J(a1 , a2 , b) =
0
and
−
e−dτ
J(a, a + bτ, b),
c
∞
Φ(a1 + bx)Φ(a2 + bx) dx.
(A 3)
Integrating (A 2) by parts with u = Φ {a1 + b1 x} Φ {a2 + b2 x} and dv = ce−cx
we obtain
∞
−cx ∞
F (a1 , a2 , b1 , b2 , c) = − Φ(a1 +b1 x)Φ(a2 +b2 x)e
+ b1
Φ(a2 +b2 x)φ(a1 +b1 x) e−cx dx
0
0
∞
Φ(a1 +b1 x)φ(a2 +b2 x) e−cx dx.
+b2
0
Now we integrate the second and third terms by parts with u = Φ(a2 + b2 x) and
dv = φ(a1 + b1 x) e−cx for term two, and similarly for term three. Using
2
φ(x) ecx dx = ec /2 Φ(x − c),
(A 4)
(Owen, 1980, equation 100,010) we find that
1 ca1 /b1 c2 /2b21
φ(a1 + b1 x) e−cx dx =
e
e
Φ {a1 + b1 x + c/b1 } .
b1
14
Paul J. Northrop, Tom M. Stone
Therefore,
F (a1 , a2 , b1, b2 , c) = Φ(a1 )Φ(a2 )
∞
∞
ca1 /b1 c2 /2b21
+e
[Φ(a2 +b2 x)Φ(a1 +b1 x+c/b1 )]0 −b2
e
φ(a2 +b2 x)Φ(a1 +b1 x+c/b1 ) dx
0
∞
∞
ca2 /b2 c2 /2b22
[Φ(a1 +b1 x)Φ(a2 +b2 x+c/b2 )]0 −b1
e
φ(a1 +b1 x)Φ(a2 +b2 x+c/b2 ) dx .
+e
0
In order to simplify the first of the remaining integrals we let y = a2 + b2 x and find
that
1
∞
G(d1 , b1 /b2 , a2 ) if b2 > 0,
b
2
φ(a2 + b2 x)Φ(a1 + b1 x + c/b1 ) dx =
1
0
− G (d1 , b1 /b2 , a2 ) if b2 < 0,
b2
where d1 = a1 − a2 b1 /b2 + c/b1 . Defining d2 = a2 − a1 b2 /b1 + c/b2 and evaluating
the second integral in a similar manner we get
F (a1 , a2 , b1, b2 , c) = Φ(a1 )Φ(a2 )
c
ca1 /b1 c2 /2b21
+ e
I12 −Φ(a2 )Φ a1 +
− I2 G d1 ,
e
b1
c
ca2 /b2 c2 /2b22
I12 −Φ(a1 )Φ a2 +
− I1 G d2 ,
e
+ e
b2
b1
, a2 + (1 − I2 )G d1 ,
b2
b2
, a1 + (1 − I1 )G d2 ,
b1
b1
, a2
b2
b2
,
, a1
b1
where I12 = I(b1 > 0, b2 > 0), I1 = I(b1 > 0), I2 = I(b2 > 0) are ordinary indicator
functions and where
c
a
b
G (a, b, c) =
Φ(a + bx)φ(x) dx = BvN √
, c; − √
1 + b2
1 + b2
−∞
is derived in a similar manner to G(a, b, c) and
c
1
a
a
H(a, b, c) =
Φ c 1 + b2 + √
φ(x)φ(a+bx) dx = √
φ √
1 + b2
1 + b2
1 + b2
−∞
follows directly from equation 110 of Owen (1980).
In the evaluation of J(a1 , a2 , b) we need only consider the case b < 0. Making
the substitution y = bx and integrating (A 3) by parts with dv=1 we obtain
0
0
1
yφ(a1 + y)Φ(a2 + y) dy +
yφ(a2 + y)Φ(a1 + y) dy .
J(a1 , a2 , b) =
b
−∞
−∞
Integrating by parts with u = Φ(a2 + y) and dv = yφ(a1 + y) for the first integral,
and similarly for the second integral, gives
1
J(a1 , a2 , b) = −
φ(a1 )Φ(a2 ) + φ(a2 )Φ(a1 ) + (a1 + a2 )Φ(a1 )Φ(a2 ) − H(a1 −a2 , 1, a2)
b
− H(a2 −a1 , 1, a1) − a1 G (a1 −a2 , 1, a2) − a2 G (a2 −a1 , 1, a1) .
Rainfall modelling
15
References
Austin, P. M. and Houze, R. A. (1972) Analysis of structure of precipitation patterns
in New England. J. Appl. Meteorol. 11, 926–935.
Chandler, R. (1997) A spectral method for estimating parameters in rainfall models.
Bernoulli 3(3), 301–322.
Cowpertwait, P. S. P. (1994) A generalised point process model for rainfall. Proc.
R. Soc. Lond. A. 447, 23–37.
Cox, D. R. and Isham, V. (1980) Point Processes. London: Chapman and Hall.
Kakou, A. (1997) Point process based models for rainfall. Ph.D. thesis, University
of London. Unpublished.
Moore, R., Jones, D., Cox, D. and Isham, V. (2000) Design of the HYREX raingauge
network. Hydrol. Earth. Syst. Sc. 4(4), 523–530.
Northrop, P. (1998) A clustered spatial-temporal model of rainfall. Proc. R. Soc.
Lond. A 454, 1875–1888.
Onof, C. and Wheater, H. S. (1993) Modelling of British rainfall using a random
parameter Bartlett-Lewis rectangular pulse model. J. Hydrology 149, 67–95.
Owen, D. B. (1980) A table of normal integrals. Communications in Statistics
B9(4), 389–419.
Petterssen, S. (1956) Weather Analysis and Forecasting. Volume 2. New York:
McGraw Hill.
Rodriguez-Iturbe, I., Cox, D. R. and Isham, V. (1987) Some models for rainfall
based on stochastic point processes. Proc. R Soc. Lond. A 410, 269–288.
Rodriguez-Iturbe, I., Cox, D. R. and Isham, V. (1988) A point process model for
rainfall : further developments. Proc. R Soc. Lond. A 417, 283–298.
Wheater, H. S. (2002) Progress in and prospects for fluvial flood modelling. Phil.
Trans. R. Soc. Lond. A 360(1796), 1409–1431.
Wheater, H. S., Isham, V. S., Cox, D. R., Chandler, R. E., Kakou, A., Northrop,
P. J., Oh, L., Onof, C. and Rodriguez-Iturbe, I. (2000) Spatial-temporal rainfall
fields: modelling and statistical aspects. Hydrol. Earth. Syst. Sc. 4(4), 581–601.
Willems (2001) A spatial rainfall generator for small spatial scales. J. Hydrol. 252,
126–144.
Wood, S. J., Jones, D. A. and Moore, R. J. (2000) Accuracy of rainfall measurement
for scales of hydrological interest. Hydrol. Earth. Syst. Sc. 4(4), 531–543.