Efficient MPI Bcast across Different Process Arrival Patterns
advertisement

Efficient MPI Bcast across Different Process Arrival Patterns
Pitch Patarasuk
Xin Yuan
Department of Computer Science, Florida State University
Tallahassee, FL 32306
{patarasu, xyuan}@cs.fsu.edu
Abstract
A Message Passing Interface (MPI) collective operation
such as broadcast involves multiple processes. The process arrival pattern denotes the timing when each process
arrives at a collective operation. It can have a profound
impact on the performance since it decides the time when
each process can start participating in the operation. In
this paper, we investigate the broadcast operation with different process arrival patterns. We analyze commonly used
broadcast algorithms and show that they cannot guarantee high performance for different process arrival patterns.
We develop two process arrival pattern aware algorithms
for broadcasting large messages. The performance of proposed algorithms is theoretically within a constant factor of
the optimal for any given process arrival pattern. Our experimental evaluation confirms the analytical results: existing broadcast algorithms cannot achieve high performance
for many process arrival patterns while the proposed algorithms are robust and efficient across different process arrival patterns.
1 Introduction
A Message Passing Interface (MPI) collective operation
such as broadcast involves multiple processes. The process
arrival pattern denotes the timing when each process arrives at a collective operation [?]. It can have a profound
impact on the performance because it decides the time when
each process can start participating in the operation. A process arrival pattern is said to be balanced when all processes
arrive at the call site at the same time (and thus, start the
operation simultaneously). Otherwise, it is said to be imbalanced.
It has been shown in [?] that (1) process arrival patterns
for collective operations in MPI applications are usually
sufficiently imbalanced to affect the communication performance significantly; (2) it is virtually impossible for MPI
application developers to control the process arrival pat-
terns in their applications; and (3) the performance of collective communication algorithms is sensitive to process arrival patterns. Hence, for an MPI collective operation to
be efficient in practice, it must be able to achieve high performance for both balanced and imbalanced process arrival
patterns. Process arrival pattern is one of the most important factors that affect the performance of collective communication operations. Unfortunately, this important factor
has been largely overlooked by the research and development community. Almost all existing algorithms for MPI
collective operations were designed, analyzed, and evaluated under an unrealistic assumption that all processes start
the operation at the same time (a balanced process arrival
pattern).
Broadcast operation is one of the most common collective operations. In this operation, a message from a process, called root, is sent to all other processes. The MPI
routine that realizes this operation is MPI Bcast [?]. Existing broadcast algorithms that are commonly considered
as efficient include the binomial tree algorithm [?, ?], the
pipelined algorithms [?, ?, ?, ?], and the scatter followed
by all-gather algorithm [?]. These algorithms have been
adopted in widely used MPI libraries such as MPICH [?]
and OPEN MPI [?]. While all of these algorithms perform reasonably well with a balanced process arrival pattern (they were designed under such an assumption), their
performance with more practical imbalanced process arrival
patterns has never been thoroughly studied.
This paper investigates the broadcast operation with different process arrival patterns. We analyze commonly used
broadcast algorithms including the flat-tree algorithm, the
binomial-tree algorithm, the pipelined algorithms, and the
scatter-allgather algorithm, and show that all of these algorithms cannot guarantee high performance for different
process arrival patterns. Our analysis follows a competitive
analysis framework where the performance of an algorithm
relative to the best possible algorithm is given. The performance of an algorithm under different process arrival patterns is characterized by the competitive ratio that bounds
the ratio between the performance of the algorithm and the
performance of the optimal algorithm for any given process
arrival pattern. We show that the competitive ratios of the
commonly used broadcast algorithms are either unbounded
or Ω(n), where n is the number of processes in the operation. This indicates that all of these algorithms may perform
significantly worse than the optimal algorithms with some
process arrival patterns. We developed two process arrival
pattern aware algorithms for broadcasting large messages.
Both algorithms have constant competitive ratios: they perform within a constant factor of the optimal for any process arrival pattern. We empirically evaluate the commonly
used and the proposed broadcast algorithms with different
process arrival patterns. The experimental evaluation confirms our analytical results: existing broadcast algorithms
cannot achieve high performance for many process arrival
patterns while the proposed algorithms are robust and efficient across different process arrival patterns.
The rest of the paper is organized as follows. Section
2 formally describes the process arrival pattern and introduces the performance metrics for measuring the performance of broadcast algorithms with different process arrival
patterns. Section 3 presents the competitive analysis of existing broadcast algorithms. Section 4 details the proposed
process arrival pattern aware algorithms. Section 5 reports
the results of our experiments. Section 6 discusses the related work. Finally, Section 7 concludes the paper.
p
average
arrival time
p
0
a
δ e
f
a
ω
e δ
e a
f
f
p
1
p
2
3
2
δ2
0
0
δ1
0
a1
e1
0
f1
arrival time
exit time
3
2
3
3
3
2
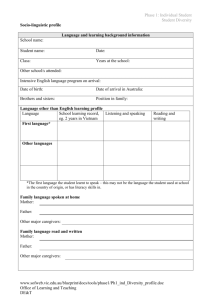
Figure 1. Process arrival pattern
messages that can be sent during the period when some processes arrive while others do not. To capture this notion, the
worst case and average case imbalance times are normalized
by the time to communicate one message. The normalized
results are called the average/worst case imbalance factor.
Let T be the time to communicate the broadcast message
from one process to another process. The average case imbalance factor equals to Tδ̄ and the worst case imbalance
factor equals to Tω . A worst case imbalance factor of 20
means that by the time the last process arrives at the operation, the first process may have sent 20 messages. It has
been shown in [?] that the worst case imbalance factors of
the process arrival patterns in MPI applications are in many
cases much larger than the number of processes involved in
the operations.
2 Background
2.2 Performance metrics
2.1 Process arrival pattern
Let n processes, p0 , p1 , ..., pn−1 , participate in a broadcast operation. Without loss generality, we will assume
that p0 is the root. Let ai be the time when process pi
arrives at the operation. The process arrival pattern can
be represented by the tuple P AP = (a0 , a1 , ..., an−1 ).
n−1
The average process arrival time is ā = a0 +a1 +...+a
.
n
Let fi be the time when process pi finishes the operation.
The process exit pattern can be represented by the tuple
P EP = (f0 , f1 , ..., fn−1 ). Let δi be the time difference
between pi ’s arrival time ai and the average arrival time ā,
δi = |ai − ā|. The imbalance in the process arrival pattern can be characterized by the average case imbalance
n−1
, and the worst case imbalance
time, δ̄ = δ0 +δ1 +...+δ
n
time, ω = maxi {ai } − mini {ai }. Figure ?? depicts the
described parameters.
The different process arrival times at a broadcast operation can significantly affect the performance. For instance,
if a broadcast algorithm requires a process to forward messages to other processes (this occurs in all tree based broadcast algorithms), the forwarding can happen only after the
process arrives. The impacts of an imbalanced process arrival pattern can be better characterized by the number of
Let the process arrival pattern P AP = (a0 , ..., an−1 )
and the process exit pattern P EP = (f0 , ..., fn−1 ). The
elapsed time of each process pi , 0 ≤ i ≤ n − 1, is ei =
fi − ai . Thus, the total time for the operation is e0 + e1 +
... + en−1 and the average per node time for this operation
n−1
is ē = e0 +e1 +...+e
. The worst case per node time is
n
g = maxi {ei }.
In an application, the total time or the average per node
time accurately reflects the time that the program spends on
an operation. Hence, we will use the average per node time
(ē) as the performance metric to characterize the performance of a broadcast algorithm with a given process arrival
pattern. The worst case per node time (g) is also interesting.
However, we consider it secondary since it does not reflect
the actual time that an application spends on the operation.
Note that the impact of load balancing in a broadcast operation, which is better reflected by the worst case per node
time, is not clear with imbalanced process arrival patterns.
In analyzing the performance of broadcast algorithms,
we assume an ideal platform such that the process exit pattern (and thus the average per node time) is a function of the
broadcast algorithm and the process arrival pattern. We ignore other deterministic and non-deterministic factors that
can affect the performance. Our assumptions will be detailed in the next section. We denotes the performance (average per node time) of a broadcast algorithm r with a process arrival pattern P AP = (a0 , ..., an−1 ) as ē(r, P AP ).
An optimal broadcast algorithm for a given process arrival pattern P AP is an algorithm that minimizes the average per node time. Formally, the optimal average per node
time for a process arrival pattern P AP is given by
OP T (P AP ) =
min
{ē(r, P AP )}
r is a broadcast algorithm
The performance ratio of a given broadcast algorithm r
on a given process arrival pattern P AP measures how far
is r from being optimal for the process arrival pattern. It is
defined as the average per node time of r on P AP divided
by the minimum possible average per node time on P AP .
P ERF (r, P AP ) =
ē(r, P AP )
OP T (P AP )
The value for P ERF (r, P AP ) is at least 1. It is exactly
1 if and only if the broadcast algorithm is optimal for the
P AP . When a broadcast algorithm is optimized for a specific process arrival pattern, it does not provide any guarantees for other process arrival patterns. The definition of the
performance ratio follows the competitive analysis framework where performance guarantees of a certain solution
are provided relative to the best possible solution. The definition of performance ratio of a broadcast algorithm can
be extended to be with respect to a set of process arrival
patterns. Let Γ be a set of process arrival patterns, the performance ratio of a broadcast algorithm r on Γ is defined
as
P ERF (r, Γ) = max {P ERF (r, P AP )}
P AP ∈Γ
When Γ includes all possible process arrival patterns,
the performance ratio is referred to as the competitive ratio. The competitive ratio of an algorithm r is denoted by
P ERF (r). The competitive ratio is the worst performance
ratio that an algorithm obtains with respect to all process arrival patterns. In our analysis, the performance of a broadcast algorithm with different process arrival patterns is characterized by its competitive ratio.
3 Competitive ratios of existing broadcast algorithms
3.1 System models
The performance of broadcast algorithms is affected
heavily by both the system architecture and the process arrival pattern. To focus on analyzing the impact of process
arrival patterns, we make the following assumptions.
• When both the sender and the receiver are ready, the time
to communicate a message of size msize between any pair
of processes is T (msize). Communications between multiple pairs of processes can happen simultaneously and do
not interfere with one another. This assumption holds when
each process runs on a different compute node and all compute nodes are connected by a cross-bar switch.
• The communications follow the 1-port model. That is,
when a process is ready, it can send and receive simultaneously. Most contemporary networking technology such as
Ethernet, InfiniBand, and Myrinet supports this model when
each compute node is equipped with one network interface
card.
• When a process receives a message, it can start forwarding the message as soon as the first bit of the message is received. Furthermore, the time to send a message is proportional to the message size: T (a × msize) = a × T (msize).
These assumptions simplify the situation when a message
is forwarded in a pipelined fashion: the message can be
pipelined for each single bit. These assumptions underestimate the communication time by not counting the startup overheads.
We consider two communication models: the blocking
model and the non-blocking model. These two models differentiate in how the system behaves when the sender tries
to send a message and the receiver is not ready for the message (e.g. not arriving at the operation yet). In the blocking
model, the sender is blocked until the receiver is ready. The
actual communication takes place after the receiver is ready.
In the non-blocking model, the sender is not blocked even
when the receiver is not ready. The actual communication
takes place when the sender is ready to send the message.
The message is thus buffered at the receiving end. When the
receiver arrives, it can read the message from local memory.
We assume that reading a message from the local memory
does not take any time. Note that in both models, a process
must arrive at the operation before it can forward a message.
Both the blocking and non-blocking models have practical applications. In MPI implementations, small messages
are usually buffered at the receiving side and follow the
non-blocking model. Large messages are typically communicated using the rendezvous protocol, which follows the
blocking model.
Let a process arrival pattern P AP = (a0 , a1 , ..., an−1 ).
Since nothing can happen in the broadcast operation before
the root arrives at the operation, we will assume that a0 ≤
ai , 1 ≤ i ≤ n−1. Note that p0 is the root. In practice, when
ai < a0 , we can treat it as if ai = a0 , and add ai − a0 in
calculating the total communication time. We denote ∆ =
maxi {ai } − a0 .
3.2 Optimal performance for a given process arrival pattern
To perform the competitive analysis of the algorithms,
we will need to establish the optimal broadcast performance
for a process arrival pattern. The following lemmas bound
the optimal performance.
Lemma 1: Consider broadcasting a message of size msize
with a process arrival pattern P AP = (a0 , ..., an−1 ). Under the non-blocking model, OP T (P AP ) ≤ T (msize).
Under the blocking model, OP T (P AP ) ≤ ∆
n +T (msize),
where ∆ = maxi {ai } − a0 .
Proof: We prove by constructing an algorithm, called
nearopt, such that ē(nearopt, P AP ) = T (msize) under
the non-blocking model and ē(nearopt, P AP ) = ∆
n +
T (msize) under the blocking model.
Let us sort the arrival times in ascending order and let the
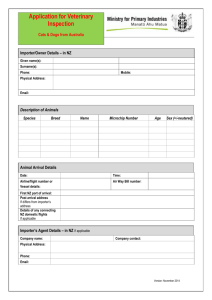
sorted arrival times be (a0 , a01 , a02 , ..., a0n−1 ) and the corresponding processes be p0 , p01 , ..., p0n−1 . Algorithm nearopt,
depicted in Figure ??, works as follows: (1) p0 sends the
broadcast message to p01 and then exits the operation; and
(2) p0i , 1 ≤ i ≤ n − 2, forwards the message it receives to
p0i+1 and then exits the operation.
p0
p’1
p’2
p’n−1
Figure 2. The near optimal broadcast algorithm (nearopt)
Under the non-blocking model, since a0i ≤ a0i+1 , each
process can start forwarding data as soon as it reaches the
operation. Hence, each process pi , 0 ≤ i ≤ n − 1, will exit
the operation at time fi = ai + T (msize). The total time
for this operation is n×T (msize) and ē(nearopt, P AP ) =
n×T (msize)
= T (msize). Under the non-blocking model,
n
OP T (P AP ) ≤ ē(nearopt, P AP ) = T (msize).
Under the blocking model, p0 will need to wait until p01 arrives before it can start sending the data. Thus,
f0 = a01 + T (msize). A process p0i , 1 ≤ i ≤ n − 2,
will need to wait until p0i+1 before it can send the data:
fi0 = a0i+1 + T (msize). The last process p0n−1 will exit at
a0n−1 + T (msize). The total time for this operation is thus,
0
f0 − a0 + f10 − a01 + ... + fn−1
− a0n−1 = ∆ + n × T (msize)
∆
and ē(nearopt, P AP ) = n + T (msize). Hence, under
the blocking model, OP T (P AP ) ≤ ē(nearopt, P AP ) =
∆
n + T (msize). 2
While the nearopt is not always optimal, it is very close
to optimal for any process arrival pattern under both models
as shown in the following lemma.
Lemma 2: Under the non-blocking communication model,
OP T (P AP ) ≥ n−1
n × T (msize). Under the blocking
(msize)
model, OP T (P AP ) ≥ ∆+(n−1)×T
.2
n
The proof is omitted due to the space limitation. Basically, for the non-blocking case, the broadcast operation
must communication at least (n − 1) × msize messages
(each of the receivers must receive a msize sized message) and the total time for this operation is at least T ((n −
=
1) × msize). Hence, OP T (P AP ) ≥ T ((n−1)×msize)
n
n−1
×
T
(msize).
The
blocking
case
follows
a
similar
arn
gument.
3.3 Competitive ratios of common broadcast algorithms
We analyze common broadcast algorithms including the
flat tree algorithm (used in OPEN MPI [?]), the binomial
tree broadcast algorithm (used in OPEN MPI and MPICH
[?]), the linear-tree pipelined broadcast algorithm (used in
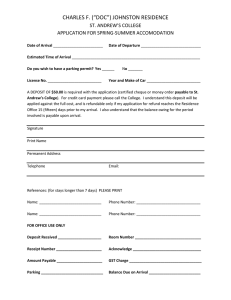
SCI-MPICH [?]), and the scatter-allgather broadcast algorithm (used in MPICH). In the flat tree algorithm (Figure ?? (a)), the root sends the broadcast message to each
of the receivers one-by-one. In the binomial tree algorithm
(Figure ?? (b)), broadcast follows a hypercube communication pattern. There are lg(n) steps in this algorithm. In the
first step, p0 sends to p1 ; in the second step, p0 sends to p2
and p1 sends to p3 ; in the i-th step, processes p0 to p2i−1 −1
have the data, each of the process pi , 0 ≤ i ≤ 2i−1 − 1,
sends the message to process pi⊕2i−1 , where ⊕ is the exclusive or operator. In the linear tree pipelined algorithm,
the msize-byte message is partitioned into X segments of
size msize
X . The communication is done by arranging the
processes into a linear array: pi , 0 ≤ i ≤ n − 2, sends to
pi+1 , as shown in Figure ?? (c). Broadcasting the msizebyte message is realized by X pipelined broadcasts of segments of size msize
X . In the scatter followed by all-gather
algorithm, the msize-byte message is first distributed to
the n processes by a scatter operation (each machine gets
msize
n -byte data). After that, an all-gather operation is performed to combine messages to all processes. We denote
the flat tree algorithm as flat, the binomial algorithm as binomial, the linear tree pipelined algorithm as linear p, and
the scatter-allgather algorithm as sca-all.
0
0
1
2
3
4
1
5
6
4
5
7
0
2
3
1
6
7
(a) flat tree
(b) binomial tree
(c) linear tree
Figure 3. Broadcast algorithms
6
7
Lemma 3: Under the non-blocking model, the competitive
ratio of any broadcast algorithm that requires a receiver to
forward a message is unbounded (can potentially be infinite).
Proof: Let a broadcast algorithm r requires a process pi
to forward a message to pj in the operation. To show that
P ERF (r) is unbounded, we must show that there exists
ē(r,P AP )
a process arrival pattern P AP such that OP
T (P AP ) is unbounded. Let us denote Λ as a very large number. We construct the process arrival pattern where all processes except
pi arrive at the same time as p0 . Process pi arrives at a
much later time a0 + Λ. P AP = (a0 , a0 , .., ai , .., a0 =
a0 , a0 , .., a0 + Λ, .., a0 ). Under this arrival pattern, process pj can only finish the operation after it receives the
message forwarded by pi . Hence, fj ≥ a0 + Λ. Thus,
e
n−1
ē(r, P AP ) = e0 +e1 +...e
≥ nj ≥ Λ
n
n . From Lemma
1, OP T (P AP ) ≤ T (msize). Hence, P ERF (r) ≥
Λ
Λ
n
≥ T (msize)
= n×T (msize)
. Since Λ is indeΛ
pendent of n or T (msize), n×T (msize) can potentially be
infinite and P ERF (r) is unbounded. 2
We will use the notion P ERF (r) = ∞ to denote that
P ERF (r) is unbounded.
ē(r,P AP )
OP T (P AP )
Theorem 1: In both the blocking and non-blocking models,
PERF(flat) = Ω(n).
Proof: Consider first the non-blocking model with a balanced process arrival pattern P AP = (a0 , a0 , ..., a0 ). Since
the root sequentially sends the message to each of the receivers, f0 = a0 + (n − 1) × T (msize); f1 = a0 +
T (msize); f2 = a0 + 2 × T (msize); ...; fn−1 = a0 +
(n − 1) × T (msize). Thus, the total time for this operation is f0 − a0 + f1 − a0 + ... + fn−1 − a0 = (n − 1) ×
Pn−1
× T (msize).
T (msize) + i=1 i × T (msize) ≥ n(n−1)
2
Hence, ē(f lat, P AP ) ≥ n−1
×
T
(msize).
From
Lemma
2
1, OP T (P AP ) ≤ T (msize). We have P ERF (f lat) ≥
lat,P AP )
n−1
Hence,
P ERF (f lat, P AP ) = ē(f
OP T (P AP ) ≥
2 .
P ERF (f lat) = Ω(n).
In the blocking model, consider the same P AP as the
non-blocking case. Since all processes arrive at the same
time, ∆ = 0. With the flat-tree algorithm, the total time
for both the blocking and non-blocking models are the
same. From Lemma 1: OP T (P AP ) ≤ ∆
n + T (msize) =
T (msize). Hence, in the blocking model, P ERF (f lat) =
Ω(n). 2
Theorem 2: In the non-blocking model, PERF(binomial) =
∞. In the blocking model, PERF(binomial) = Ω(n).
Proof: In the non-blocking model, since the binomial tree
algorithm requires forwarding of messages, from Lemma 3,
P ERF (binomial) = ∞.
In the blocking model, consider the arrival pattern P AP
where the lg(n) direct children of the root arrive at a0 +
Λ and all other processes arrive at a0 . Let us assume
Λ
Λ
n ≥ T (msize). From Lemma 1, OP T (P AP ) ≤ n +
2Λ
T (msize) ≤ n . Clearly, in this operation, all processes will exit the operation after a0 + Λ. Hence, the total time for this operation is larger than (n − lg(n))Λ ≥
n
2 Λ. The average per node time ē(binomial, P AP ) ≥
Λ
2 . P ERF (binomial) ≥ P ERF (binomial, P AP ) =
ē(binomial,P AP )
≥ n4 . Hence, P ERF (binomial) = Ω(n).
OP T (P AP )
Theorem 3: In the non-blocking model, PERF(linear p) =
∞. In the blocking model, PERF(linear p) = Ω(n).
Proof: The linear tree pipelined algorithm requires the intermediate processes to forward messages. From Lemma 3,
in the non-blocking model, P ERF (linear p) = ∞.
In the blocking model, consider the process arrival pattern where process p1 arrives much later than all other
nodes: P AP = (a0 , a0 + Λ, a0 , ..., a0 ). Let Λ be much
larger than T (msize). Following the linear tree, all processes can receive the broadcast message after a0 + Λ.
Hence, the total time is at least (n − 1)Λ ≥ n2 Λ. Following the similar argument as that in the binomial tree,
P ERF (linear p) = Ω(n). 2
Theorem 4: In the non-blocking model, PERF(sca-all) =
∞. In the blocking model, PERF(sca-all) = Ω(n).
Proof: In the scatter-allgather algorithm, there is an implicit synchronization: in order for any process to finish
the all-gather operation, all process must arrive at the operation. This implicit synchronization applies to both the
blocking and non-blocking models. Consider arrival pattern when p1 arrives late: P AP = (a0 , a0 + Λ, a0 , ..., a0 ).
For both blocking and non-blocking models, due to the implicit synchronization, the total time for this algorithm is at
least (n − 1)Λ ≥ n2 × Λ and the per node time is at least Λ2 .
In the non-blocking model: since OP T (P AP ) ≤
Λ
, which is unT (msize), PERF(sca-all, PAP) ≥ 2T (msize)
bounded. Hence, PERF(sca-all) ≥ PERF(sca-all, PAP)
= ∞. In the blocking model, when Λ
n ≥ T (msize),
2Λ
OP T (P AP ) ≤ Λ
+T
(msize)
≤
.
PERF(sca-all,
PAP)
n
n
≥ n4 . Hence, PERF(sca-all) = Ω(n). 2
Theorems 1 to 4 show that the competitive ratios of all
of these commonly used algorithms are either unbounded or
Ω(n) for both the blocking or non-blocking models, which
indicates that these algorithms cannot guarantee high performance for different process arrival patterns: all of these
algorithms can potentially perform much worse than the optimal algorithm for some process arrival patterns.
4 Process arrival pattern aware algorithms
We present two new broadcast algorithms, one for each
communication model, with constant competitive ratios:
these algorithms guarantee high performance for any process arrival patterns. The new algorithms are designed for
broadcasting large messages. The idea is to add control
messages to make the processes aware of and adapt to the
process arrival pattern. Note that any efficient algorithm
will not wait until all processes arrive before taking any
action. Such an algorithm must make on-line decisions as
processes arrive: hence, the nearopt algorithm in Figure ??
cannot be used.
Since the algorithms are designed for broadcasting large
messages, we will assume that sending and receiving a
small control message do not take time. Moreover, under
the assumption in Section 3.1, broadcasting to a group of
processes when all receivers are ready will take T (msize)
time (e.g. using the nearopt algorithm). In practice, the
linear tree pipelined broadcast algorithm can have a communication time very close to T (msize) when the message
size is sufficiently large [?]. We will call the broadcast to
a sub-group of processes sub-group broadcast. In a subgroup broadcast, only the root knows the group members.
Hence, the root will need to initiate the operation. In practice, this can be done efficiently. Consider for example using the linear tree pipelined broadcast algorithm for a subgroup broadcast. The root can send a header that contains
the list of receivers in the sub-group before the broadcast
message. When a receiver receives the headers, it will know
how to form the linear tree by using the information in the
header.
The algorithm for the non-blocking model, called arrival nb, is shown in Figure ??. When a receiver arrives at
the operation, it checks to see whether the broadcast message has been received. If the message has been received,
it copies the message from the local memory to the output buffer and the operation is completed. If the message
has not been received, the receiver sends a control message
ARRIVED to the root and waits for the sub-group broadcast initiated by the root to receive the message. The root
repeatedly checks whether some process arrives. If some
processes arrive, it initiates a sub-group broadcast among
the processes. If no process arrives, the root picks a receiver
that have not been sent the broadcast message and sends the
message to the receiver.
Theorem 5: Under the assumptions in Section 3.1, ignoring
the control message overheads, PERF(arrival nb) ≤ 3.
Proof: In arrival nb, the algorithm works in rounds, in
each round, the root either sends a message to one node, or
performs a sub-group broadcast. In both case, T (msize)
will be incurred in each round. Since at most n − 1 rounds
are performed by the root, f0 ≤ a0 + (n − 1)T (msize).
Consider a receiving process, pi , 1 ≤ i ≤ n − 1.
In the worst case, pi must wait one full round before it
starts participating in the sub-group broadcast. It takes
Receiving process:
(1) Check if the message has been buffered locally
(2) If yes, copy the message and exit;
(3) Else, send control message ARRIVED to the root.
(4) Participate in the sub-group broadcast initiated by
the root to receive the broadcast message.
Root process:
(1) While (some receivers have not been sent the message)
(2)
Check if any ARRIVED messages have arrived
(3)
Discard the ARRIVED messages from receivers who
have been sent the broadcast message
(4)
if (a group of receivers have arrived)
(5)
Initiate a sub-group broadcast
(6)
else
(7)
Select a process pi that has not been sent the
message and send the broadcast message to pi
Figure 4. Broadcast algorithm for the nonblocking model (arrival nb)
pi at most 2T (msize) to complete the operation: fi ≤
ai + 2T (msize). Hence, the total time among all processes
in the operation is no more than (n − 1)T (msize) + 2(n −
1)T (msize) and the average per node time is no more than
3(n−1)
×T (msize). This applies to any process arrival patn
tern, PAP. From Lemma 2, OP T (P AP ) ≥ n−1
n T (msize).
P ERF (arrival nb) ≤ 3. 2
The algorithm for the blocking model, called arrival b is
shown in Figure ??. When a receiver arrives at the operation, it sends a control message ARRIVED to the root and
waits for the sub-group broadcast initiated by the root to
receive the broadcast message. The root repeatedly checks
whether some process arrives. If some processes arrive, it
initiates a sub-group broadcast among the processes. Otherwise, it just waits until some processes arrive.
Receiving process:
(1) Send control message ARRIVED to the root.
(2) Participate in the sub-group broadcast initiated by
root to receive the broadcast message.
Root process:
(1) While (some receivers have not been sent the message)
(2)
Check if any ARRIVED messages have arrived
(3)
if (a group of receivers have arrived)
(4)
Initiate a sub-group broadcast
Figure 5. Broadcast algorithm for the blocking
model (arrival b)
Theorem 6: Under the assumptions in Section 3.1, ignoring
the control message overheads, PERF(arrival b) ≤ 3.
Proof: In arrival b, the algorithm works in rounds. In each
round, the root waits for some processes to arrive and performs the sub-group broadcast. Consider a receiving process, pi , 1 ≤ i ≤ n − 1. In the worst case, after pi arrives at the operation, it must wait T (msize) time before
it starts participating in the sub-group broadcast. Hence,
it takes pi at most 2T (msize) to complete the operation:
fi ≤ ai + 2T (msize).
The root exits the operation only after the last process receives the broadcast message. After the last process arrives, it will wait at most 2T (msize) to receive the
message. Hence, f0 ≤ a0 + ∆ + 2T (msize). Hence,
the total time among all processes in the operation is no
more than ∆ + 2T (msize) + 2(n − 1)T (msize) and the
average per node time is no more than ∆+2n×Tn (msize) .
This applies to any process arrival pattern PAP. From
(msize)
Lemma 2, OP T (P AP ) ≥ ∆+(n−1)×T
. Hence,
n
∆+2n×T (msize)
P ERF (arrival b) ≤ ∆+(n−1)×T (msize) ≤ 3. 2
5 Performance study
The study is performed on two clusters: Draco and Cetus. The Draco cluster has 16 compute nodes with a total
of 128 cores. Each node is a Dell PowerEdge 1950 with
two 2.33GHz Quad-core Xeon E5345’s (8 cores per node)
and 8GB memory. The compute nodes are connected by a
20Gbps InfiniBand DDR switch. The MPI library in this
cluster is mvapich-0.9.9. The Cetus cluster is a 16-node
Ethernet switched cluster. Each node is a Dell Dimension 2400 with a 2.8GHz P4 processor and 640MB memory. All nodes run Linux (Fedora) with 2.6.5-1.358 kernel.
The Ethernet card in each machine is Broadcom BCM 5705
1Gbps/100Mbps/10Mbps card with the driver from Broadcom. The Ethernet switch connecting all nodes is a Dell
Powerconnect 2724 (24-port, 1Gbps switch). The MPI library in this cluster is MPICH2-1.0.4.
To evaluate the performance of the existing and proposed broadcast algorithms, we implemented these algorithms over MPI point-to-point routines. Since we consider broadcasting large messages and almost all existing
implementations for broadcasting large messages follow the
blocking model, our evaluation also focuses on the blocking
model. We implemented the flat tree algorithm (flat), the
linear-tree pipelined algorithm (linear p), the binomial tree
algorithm (binomial), and the proposed process arrival pattern aware algorithm (arrival b). In addition, we also consider the native algorithm from the MPI library (denoted
as native). In the implementation of arrival b, there can
be multiple methods to perform the sub-group broadcast.
We choose the most efficient scheme for each platform:
the linear p with a segment size of 8KB on Cetus and
the scatter-allgather algorithm for Draco. Besides studying
the blocking model, we also implemented two algorithms
that follow the non-blocking model on Draco when each
node runs one process: the non-blocking flat tree algorithm
(denoted as flat nb) and the process arrival pattern aware
non-blocking algorithm (denoted as arrival nb). The nonblocking communication is achieved by chopping a large
point-to-point message into a set of small messages to avoid
the rendezvous protocol in MPI and other factors that cause
communications to block. Note that using the MPI Rsend
routine can avoid the rendezvous protocol. However, for
some reason, this routine is still blocking in the broadcast
operation.
(1) r = rand() % MAX IF;
(2) for (i=0; i<ITER; i++) {
(3) MPI Barrier (...);
(4) for (j=0; j<r; j++) {
(5)
/* computation time equals to one message time */
(6) }
(7) t0 = MPI Wtime();
(8) MPI Bcast(...);
(9) elapse += MPI Wtime() - t0 ;
(10)}
Figure 6. Code segment for studying controlled random process arrival patterns
We perform extensive experiments to study the broadcast
algorithms with many different process arrival patterns. We
will present two representative experiments. The first study
investigates the performance of the algorithms with random
process arrival patterns. The second study investigates the
performance when a small subset of processes arrive at the
operation later than other processes. The code segment in
the benchmark to study random process arrival patterns is
shown in Figure ??. In this benchmark, a random value that
is bounded by a constant MAX IF is generated and stored
in r. For different processes, r is different since different
processes have different seeds. The controlled random process arrival pattern is created by first calling an MPI Barrier
and then executing the computation in the loop in lines (4)
to (6) whose duration is controlled by the value of r. The
loop body in line (5) executes roughly the time to send one
broadcast message between two nodes. Hence, the maximum imbalance factor (defined in Section 2) is at most
MAX IF in this experiment. The code to investigate the effect with a few late arriving processes is similar except that
the loop in lines (4)-(6) is always executed MAX IF times
and that each process (except the root) has a probability to
run this loop.
In reporting the results, we fix either the broadcast mes-
1
2
4
8 16 32 64 128
MAX_IF
Average per node time (ms)
(a) Draco (2MB)
300
Native
Arrival_b
Flat
Linear_p
Binomial
250
200
150
Average per node time (ms)
Native
Arrival_b
Flat
Linear_pl
Binomial
100
160
Native
140
Arrival_b
120
Flat
Linear_pl
100
Binomial
80
60
40
20
0
128K 256K 512K
1M
Message Size (bytes)
2M
(a) Draco
50
0
1
2
4
8 16 32 64 128
MAX_IF
(b) Cetus (256KB)
Figure 7. Performance with controlled random process arrival patterns
Average per node time (ms)
Average per node time (ms)
160
140
120
100
80
60
40
20
0
sage size or the M AX IF value. Each data point in our
results is an average of twenty random samples (twenty
random process arrival patterns). In studying the blocking model, n = 128 on Draco (8 processes per node) and
n = 16 on Cetus. In studying the non-blocking model,
n = 16 on Draco.
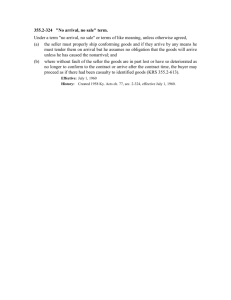
Figure ?? shows the performance of different algorithms
with controlled random process arrival patterns. The broadcast message size is 2MB on Draco and 256KB on Cetus. On both clusters, when the imbalanced factor is
small (MAX IF is small), arrival b performs slightly worse
than the best performing algorithms. Even in such cases,
arrival b is competitive: the performance is only slightly
worse than the best performing algorithm mainly due to the
overheads introduced. When the process arrival pattern becomes more imbalanced (MAX IF is larger), the arrival b
significantly out-performs all other algorithms. The performance difference is large when MAX IF is large.
400
Native
350
Arrival_b
300
Flat
Linear_p
250
Binomial
200
150
100
50
0
128K 256K 512K
1M
Message Size (bytes)
2M
(b) Cetus
Figure 8. Broadcast with different message
size with M AX IF = n
Native
Arrival_b
Flat
Linear_p
Binomial
120
100
80
60
40
140
120
100
80
40
20
0
128K
0
1
2
4
300
250
200
150
100
50
0
1
2
4
8 16 32 64 128
MAX_IF
(b) Cetus (512KB)
Figure 9. Performance when 20% of processes arrive late
Figure ?? shows the performance when a small subset of
processes arrive late. In this experiment, the sender always
arrives early and each of the receiving process has a 20%
probability to arrive late. The time for late arrival is roughly
equal to the time to send MAX IF messages. The broadcast
message size is 1MB on Draco and 512KB on Cetus. As can
be seen in the figure, binomial, linear p, and native behave
similarly and perform worse than arrival b when MAX IF
is large. The flat and arrival b have similar characteristics
with arrival b performing much better. Figure ?? shows
256K 512K
1M
Message Size (bytes)
2M
(a) Draco
8 16 32 64 128
MAX_IF
Native
Arrival_b
Flat
Linear_p
Binomial
Native
Arrival_b
Flat
Linear_p
Binomial
60
20
(a) Draco (1MB)
Average per node time (ms)
Average per node time (ms)
140
the performance on different message sizes with the same
settings. MAX IF = n (the number of processes) and the
broadcast message size varies. Arrival b is efficient for a
wide range of message sizes.
Average per node time (ms)
Average per node time (ms)
Figure ?? shows the performance with different message
sizes. We fixed MAX IF = n. On Draco, n = 128 and
on Cetus, n = 16. As can be seen in the figure, on both
clusters, arrival b maintains its advantage for a wide range
of message sizes. When the message size is not sufficiently
large, arrival b may not achieve a good performance due
to the control message overheads it introduces. This can be
seen in the 128KB case on Draco.
300
250
200
Native
Arrival_b
Flat
Linear_p
Binomial
150
100
50
0
128K
256K 512K
1M
Message Size (bytes)
2M
(b) Cetus
Figure 10. Performance when 20% of processes arrive late (MAX IF = n)
Figure ?? shows the performance of the non-blocking
algorithms. This figure shows the cases when 20% of processes arrive late. There are two trends in the figure. First,
the non-blocking algorithm performs better than the corresponding blocking algorithm. This is because the reduction
of the waiting time in a non-blocking algorithm. Second,
with a non-blocking algorithm, the average per node time is
not very sensitive to the process arrival pattern: see the flat
line in Figure ?? (a), which indicates that the non-blocking
model is more efficient than the blocking model. Unfortunately, making point-to-point communications with a large
amount of data non-blocking is very difficult: many factors
such as the limited system buffers in various levels of soft-
Average per node time (ms)
ware can make the communication blocking.
20
Arrival_b
Arrival_nb
Flat
Flat_nb
15
10
5
0
1
2
4
8 16 32
MAX_IF
64 128
Average per node time (ms)
(a) 1MB
18
Arrival_b
16
Arrival_nb
14
Flat
12
Flat_nb
10
8
6
4
2
0
128K 256K 512K
1M
Message Size (bytes)
have been developed and adopted in common MPI libraries.
These algorithms achieve high performance with a balanced
process arrival pattern. However, their performance with
imbalanced process arrival patterns has not been thoroughly
studied.
The characteristics and impacts of process arrival patterns in MPI applications were studied in [?]. Our work is
motivated by the results in [?]. While process arrival pattern is an important factor, few collective communication
algorithms have been developed to deal with imbalanced
process arrival patterns. The only algorithms that can adapt
to different process arrival patterns (known to us) were published in [?], where algorithms for all-reduce and barrier
can automatically change their logical topologies based on
the process arrival pattern. We formally analyze the performance of existing broadcast algorithms with different process arrival patterns. This is the first time such analysis is
performed on any collective algorithms.
7 Conclusion
2M
We study efficient broadcast schemes with different process arrival patterns. We show that existing algorithms cannot guarantee high performance with different process arrival patterns, and develop new broadcast algorithms that
achieve constant competitive ratios for the blocking and
non-blocking models. The experiment results show that the
proposed algorithms are robust and efficient for different
process arrival patterns.
(b) MAX IF = 16
Acknowledgement
Figure 11. Non-blocking case (Draco with
each node running one process (n = 16))
Our experimental results confirm the analytical findings.
The commonly used algorithms perform poorly when the
process arrival pattern has a large imbalance factor. On the
other hand, the proposed process arrival pattern aware algorithms react much better to imbalanced process arrival patterns. Moreover, when the imbalance factor is large, using
our algorithms improves the performance very significantly.
6 Related Work
The broadcast operation in different environments has
been extensively studied. Many algorithms were developed
for topologies used in parallel computers such as meshes
and hypercubes [?, ?]. Generic broadcast algorithms including the binomial tree algorithms [?, ?], the pipelined broadcast algorithms [?, ?, ?], the scatter-allgather algorithm [?],
This work is supported in part by National Science Foundation (NSF) grants: CCF-0342540, CCF-0541096, and
CCF-0551555.
References
[1] A. Faraj, P. Patarasuk, and X. Yuan, “A Study of Process Arrival Patterns for MPI Collective Operations,” the 21th ACM
ICS, pages 168-179, June 2007.
[2] S. L. Johnsson and C. T. Ho, “Optimum Broadcasting and
Personalized Communication in Hypercube.” IEEE Trans.
on Computers, 38(9):1249-1268, 1989.
[3] R. Kesavan, K. Bondalapati, and D.K. Panda, “Multicast on
Irregular Switch-based Networks with Wormhole Routing.”
IEEE HPCA, Feb. 1997.
[4] H. Ko, S. Latifi, and P. Srimani, “Near-Optimal Broadcast in
All-port Wormhole-routed Hypercubes using Error Correcting Codes.” IEEE TPDS, 11(3):247-260, 2000.
[5] A. Mamidala, J. Liu, D. Panda. “Efficient Barrier and Allreduce on InfiniBand Clusters using Hardware Multicast and
Adaptive Algorithms.” IEEE Cluster, pages 135-144, Sept.
2004.
[6] P.K. McKinley, H. Xu, A. Esfahanian and L.M. Ni,
“Unicast-Based Multicast Communication in WormholeRouted Networks.” IEEE TPDS, 5(12):1252-1264, Dec.
1994.
[7] MPICH - A Portable Implementation
http://www.mcs.anl.gov/mpi/mpich.
of
MPI.
[8] The MPI Forum, “The MPI-2: Extensions to the Message Passing Interface,” Available at http://www.mpiforum.org/docs/mpi-20-html/mpi2-report.html.
[9] Open MPI: Open Source High Performance Computing,
http://www.open-mpi.org/.
[10] P. Patarasuk, A. Faraj, and X. Yuan, “Pipelined Broadcast on
Ethernet Switched Clusters.” The 20th IEEE IPDPS, April
25-29, 2006.
[11] SCI-MPICH: MPI for SCI-connected Clusters. Available at: www.lfbs.rwth-aachen.de/ users/joachim/SCIMPICH/pcast.html.
[12] R. Thakur, R. Rabenseifner, and W. Gropp, “Optimizing of Collective Communication Operations in MPICH,”
ANL/MCS-P1140-0304, Mathematics and Computer Science Division, Argonne National Laboratory, March 2004.
[13] S. S. Vadhiyar, G. E. Fagg, and J. Dongarra, “Automatically Tuned Collective Communications,” In Proceedings
of SC’00: High Performance Networking and Computing,
2000.
[14] J. Watts and R. Van De Gejin, “A Pipelined Broadcast
for Multidimensional Meshes.” Parallel Processing Letters,
5(2)281-292, 1995.