Homework 5.1 Solutions Math 5110/6830
advertisement

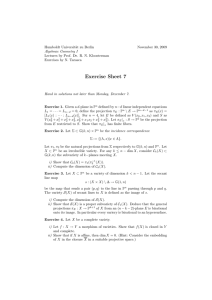
Homework 5.1 Solutions Math 5110/6830 1. (a) For dx dt = x − x3 Phase-line diagram: Fixed points are x∗ = 0 and x∗ = ±1. Stability analytically (you can get this from your phase-line diagram too). Let f (x) = x − x3 f 0 (x) = 1 − 3x2 f 0 (0) = 1 f 0 (1) = −2 f 0 (−1) = −2 Then, x∗ = 0 is unstable and both x = 1 and x = −1 are stable. Sketch of x(t): 3 2 x(t) 1 0 −1 −2 −3 0 0.1 0.2 0.3 0.4 0.5 t 0.6 0.7 0.8 0.9 1 To solve ẋ = x − x3 , we can use separation of variables. Z x(t) x0 Z x(t) x0 1 dx = dt x − x3 Z t 1 dx̄ = dt̄ x̄ − x̄3 0 1 dx̄ = t x̄(1 − x̄)(1 + x̄) Using partial fractions: 1 1 1 2 2 + − dx̄ x̄ 1 − x̄ 1 + x̄ x0 x(t) 1 1 ln(x̄) − ln(1 − x̄) − ln(1 + x̄) 2 2 x0 x(t) x̄ ln √ 1 − x̄2 x0 x(t) x̄ ln √ 1 − x̄2 x0 ! x x0 ln √ − ln p 1 − x2 1 − x20 1/2 x2 ln 1 − x2 x2 1 ln 2 1 − x2 x2 ln 1 − x2 x2 1 − x2 Z x(t) 2 x x2 1+ x20 2t e 1 − x20 = t = t = t = t = t = = = = = 2 1/2 x20 1 − x20 x20 1 t + ln 2 1 − x20 x20 2t + ln 1 − x20 x20 2t e 1 − x20 x20 2t e (1 − x2 ) 1 − x20 x20 2t e 1 − x20 = t + ln x20 e2t 1−x20 x = x(t) = x0 et p (1 − x20 + x20 e2t ) x20 2t 1 + 1−x 2e 0 v u 2 x0 u e2t 1−x20 u x(t) = t x20 2t 1 + 1−x 2e 0 s x20 e2t x(t) = (1 − x20 + x20 e2t ) (b) For dx dt = e−x sin(x) Phase-line diagram: Fixed points are x∗ = nπ. Stability analytically (you can get this from your phase-line diagram too). Let f (x) f 0 (x) = e−x sin(x) = −e−x sin(x) + e−x cos(x) Then, x∗ = nπ is unstable for n even and stable for n odd. Sketch of x(t): This cannot be solve analytically. 2. To find an equation for this phase-line diagram, we can notice that we will have roots x = −1, x = 0 and x = 2. So, the equation will take the form dx dt = x(x + 1)(x − 2) But, to get the correct stability, we can check concavity. We need the function to be concave up at x = −1, concave down at x = 0 and concave up at x = 2: f (x) = x(x + 1)(x − 2) f 0 (x) = 3x2 − 2x − 2 f 00 (x) = 6x − 2 f 00 (−1) = −8 So, this fails. Lets think about it though. If we want this equation to be concave up at x = −1 then the 2 term (x + 1) should be squared. Let’s try dx dt = x(x + 1) (x − 2): f 00 (x) = 12x2 − 6 f 00 (−1) = 6 f 00 (0) = −6 f 00 (2) = 42 Then, this works! So, an equation to match the phase-line diagram is: dx dt = x(x + 1)2 (x − 2) 3. We can use separation of variables for this equation: dN dt Z N (t) N0 1 dN N 1 dN̄ N̄ N (t) ln(N̄ )N0 = K(t)N = K(t)dt Z t = K(t̄)dt̄ 0 t Z = K(t̄)dt̄ 0 Z t ln(N (t)) − ln(N0 ) = K(t̄)dt̄ 0 Z t N (t) = ln K(t̄)dt̄ N0 0 Rt N (t) = e( 0 K(t̄)dt̄) N0 Rt N (t) = N e( 0 K(t̄)dt̄) 0 4. Solution using separation of variables: 1 N 1− Z N (t) N̄ 1 − = rN dN = rdt dN̄ = Z 1 N0 N K dN dt N̄ K 1− N K t rdt̄ 0 Using partial fractions: Z N (t) N0 " 1 1 + K N̄ N̄ 1− K # Z dN̄ t rdt̄ = 0 Now integrate: ln N (t) N̄ ln N̄ − ln 1 − K N0 !N (t) N̄ ln N̄ 1− K N0 ! ! N (t) N0 − ln 1 − NK0 1 − NK(t) 1 − NK0 N (t) ln 1 − NK(t) N0 = rt = rt = rt = rt K − N0 N (t) = N0 ert K − N (t) (K − N0 )N (t) = N0 ert (K − N (t)) (K − N0 + N0 ert )N (t) = N0 Kert N0 Kert N (t) = K − N0 + N0 ert N0 ert N (t) = N0 rt 1 + K (e − 1) Solution using the substitution x = N1 : With x = N1 , or equivalently N = x1 , we have: dN dt = − 1 dx x2 dt Substituting this into the logistic eqn: − 1 dx x2 dt dx dt 1 1 1 1− x Kx 1 = r −x K = r Now separate variables and integrate: Z t 1 dx̄ = rdt̄ 1 x0 0 K − x̄ x(t) 1 − ln − x̄ = rt K x0 1 1 − ln − x(t) + ln − x0 = rt K K 1 − x0 ln 1K = rt K − x(t) 1 − Kx0 = ert 1 − Kx(t) 1 − Kx(t) = (1 − Kx0 )e−rt 1 x(t) = [1 − (1 − Kx0 )e−rt ] K Z x(t) Returning to the original variables: 1 N (t) = N (t) = = = = 5. Phase-line diagram: Solution: 1 K 1− 1− e−rt K N0 K 1 − 1 − NK0 e−rt Kert ert − 1 + K N0 rt N0 e − NK0 + 1 N0 rt K e N0 ert 1 + NK0 (ert − 1) Homework 5.2 Solutions Math 5110/6830 1. (a) Fixed points satisfy: dx =0 = dt 2 1 − e−x The only fixed point is x∗ = 0. To determine its stability: f (x) = 2 1 − e−x 2 f 0 (x) = 2xe−x f 0 (0) = 0 From this, we cannot determine the stability of x∗ = 0. Therefore, we will need to do this graphically: As you can see, this point is half-stable. (b) Fixed points satisfy: dx =0 = dt ln(x) The only fixed point is x∗ = 1. To determine its stability: f (x) = ln(x) 1 f 0 (x) = x f 0 (1) = 1 And, x∗ = 1 is unstable. (c) Fixed points satisfy: dx =0 dt = x(1 − x)(2 − x) The fixed points are x∗ = 0, x∗ = 1, and x∗ = 2. To determine their stability: f (x) f 0 (x) f 0 (0) f 0 (1) f 0 (2) = = = = = x(1 − x)(2 − x) (1 − x)(2 − x) − x(2 − x) − x(1 − x) 2 −1 2 And, x∗ = 0 is unstable, x∗ = 1 is stable and x∗ = 2 is unstable. (d) Fixed points satisfy: dx = 0 = ax − x3 = x(a − x2 ) dt √ √ The fixed points are x∗ = 0, x∗ = − a, and x∗ = a. To determine their stability, let f (x) = ax − x3 Then, for a > 0 f 0 (x) = a − 3x2 f 0 (0) = a √ f 0 (− a) = −2a √ f 0 ( a) = −2a √ √ For a > 0, x∗ = 0 is unstable, x∗ = − √ a is stable and x∗ = a is stable. But for a < 0, x∗ = 0 is √ stable, x∗ = − a is unstable and x∗ = a is unstable. And, for a = 0, there is only one fixed point x∗ = 0 which we need to do a graphical stability analysis for: Looks stable to me. 2. (a) To determine stability, let = −xc and f 0 (x) = −cxc−1 f (x) Then, for c = 1 this is stable. However, we need to do this graphically for other values of c: ???? (b) To find an equation for time here, we can separate variables and solve this DE: dx dt = −xc Z x(t) Z t 1 dx̄ = −dt̄ x̄c x0 0 Z x(t) Z t x̄−c dx̄ = −dt̄ x0 0 −c+1 x̄ −c + 1 x(t) = −t x0 x−c+1 0 x(t)−c+1 − −c + 1 −c + 1 x(t)−c+1 = −t = x−c+1 − t(−c + 1) 0 −c+1 1 x(t) = x0 − t(−c + 1) −c+1 Letting x0 = 1: x(t) = 1 [1 − t(−c + 1)] −c+1 Now, to find the time it takes til x(t) = 0: 1 x(t) = 0 = [1 − t(−c + 1)] −c+1 0 = 1 − t(−c + 1) 1 t = 1−c 3. To show that there are infinite solutions to ẋ = x1/3 , we can find at least 2 solutions that pass through the same point. Notice that x(t) = 0 is one solution that passes through the point (0, 0). The other solution, found by separation of variables, is x(t) = 23 x3/2 . This solution also passes through the point (0, 0).