Math 5110/6830 Homework 4.1 Solutions 1. (a) A fixed point satisfies the equation
advertisement
 A fixed point satisfies the equation")
Math 5110/6830
Homework 4.1 Solutions
1. (a) A fixed point satisfies the equation
x∗ = r2 x∗ [1 − (r + 1)x∗ + 2rx∗ 2 − rx∗ 3 ].
x∗ = 0 is immediately a solution. Now, notice that r−1
r is a fixed point of the original logistic
equation, f (x). So, it satisfies x∗ = f (x∗ ). Since f 2 (x) = f (f (x)), and a fixed point of
f 2 (x) satisfies x∗ = f (f (x∗ )), it follows that if x∗ is a fixed point of the original equation,
f (f (x∗ )) = f (x∗ ) = x∗ , and so x∗ is a fixed point of the second-iterate equation. Thus,
2
2
2
3
x∗ = r−1
r is a fixed point of f (x) = r x[1 − (r + 1)x + 2rx − rx ].
As a fixed point, r−1
r must be root of the following equation:
−r2 [1 − (r + 1)x + 2rx2 − rx3 ] + 1 = 0,
which implies that x − r−1
r must be a factor of the left-hand side (LHS). We can therefore
divide the LHS by x − r−1
r to determine the other two roots of the equation.
r3 x2 − r2 (r + 1)x + r(r + 1)
x−
r−1
r
r 3 x3 −
2r3 x2 + r2 (r + 1)x + (1 − r2 )
r3 x3 − r2 (r − 1)x2
− r2 (r + 1)x2 + r2 (r + 1)x
− r2 (r + 1)x2 + r(r2 − 1)x
r(r + 1)x + (1 − r2 )
r(r + 1)x − (r2 − 1)
From this, it follows that r3 x2 − r2 (r + 1)x + r(r + 1) = r2 x2 − r(r + 1)x + (r + 1) = 0,
which has the roots
p
r(r + 1) ± r2 (r + 1)2 − 4r2 (r + 1)
x1,2 =
2
√ 2r
r(r + 1) ± r r2 + 2r + 1 − 4r − 4
=
2r2
√
r + 1 ± r2 − 2r − 3
=
p2r
r + 1 ± (r − 3)(r + 1)
=
,
2r
√
r+1± (r−3)(r+1)
and so the second-iterate map has the 4 fixed points x∗ = 0, r−1
,
.
r
2r
√
√
r+1+ (r−3)(r+1)
r+1− (r−3)(r+1)
(b) The fixed points u =
and v =
form the 2-cycle of the
2r
2r
original system. The 2-cycle exists when these two fixed points are distinct, real, defined, and
positive. They are distinct and real whenever (r − 3)(r + 1) > 0, which occurs when r < −1
and r > 3. Since r > 0, the fixed points are defined,√and r > 3 must be true. Further,
r+1−
(r−3)(r+1)
> 0, which occurs when
u is always positive, but v is only positive when
2r
p
r + 1 − (r − 3)(r + 1) > 0. Multiplying both sides by the conjugate (which is positive)
1
gives the inequality
(r + 1 −
p
p
(r − 3)(r + 1))(r + 1 + (r − 3)(r + 1)) > 0
⇒ (r + 1)2 − (r + 1)(r − 3) > 0
⇒ 4(r + 1) > 0.
Since we already know that r > 3 must be true, this inequality will always hold. Thus, we
have a 2-cycle for r > 3. The other points, as mentioned earlier, correspond to the fixed
points of the original logistic equation.
(c)
d 2
d 2
r x(1 − (r + 1)x + 2rx2 − rx3 )
f (x) =
dx
dx
= r2 (1 − (r + 1)x + 2rx2 − rx3 ) + r2 x(−(r + 1) + 4rx − 3rx2 )
= r2 − 2r2 (r + 1)x + 6r3 x2 − 4r3 x3
(d) To determine when the non-trivial 2-cycle is stable, we need to find out when the fixed
points of the second-iterate map that corresponding
to the 2-cycle are stable. Stability
d 2 of the 2-cycle occurs when dx f (x) x=u,v < 1. After some algebra, it turns out that
d 2
d 2
f
(x)
=
f
(x)
= −r2 + 2r + 4. So, stability exists when | − r2 + 2r + 4| < 1.
dx
dx
x=u
x=v
We need to solve two inequalities:
i. −r2 + 2r + 4 < 1 ⇒ −r2 + 2r + 3 < 0 ⇒ r > 3
√
ii. −r2 + 2r + 4 > −1 ⇒ −r2 + 2r + 5 > 0 ⇒ 0 < r < 1 + 6
√
Therefore, the 2-cycle is stable for 3 < r < 1 + 6.
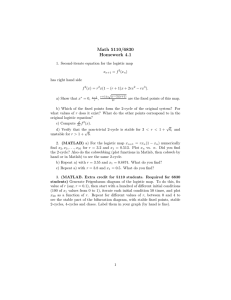
2. (a) For r = 3.2 and x1 = 0.513:
x1
0.5130
x2
0.7995
x3
0.5130
x4
0.7995
x5
0.5130
x6
0.7995
x7
0.5130
x8
0.7995
x9
0.5130
x10
0.7995
1
xn+1=f(xn)
0.9
0.7
xn+1=xn
cobweb
0.8
0.6
0.7
xn
0.5
0.6
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
1
2
3
4
5
6
7
8
9
10
0
0.2
0.4
0.6
0.8
1
n
The 2-cycle bounces between 0.5130 and 0.7995.
(b) For r = 3.55 and x1 = 0.8874:
x1
0.8874
x2
0.3547
x3
0.8126
x4
0.5407
x5
0.8816
2
x6
0.3705
x7
0.8279
x8
0.5057
x9
0.8874
x10
0.3548
1
xn+1=f(xn)
0.8
0.9
0.7
0.8
xn+1=xn
cobweb
0.7
0.6
0.6
xn
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
1
2
3
4
5
6
7
8
9
10
0
0.2
0.4
0.6
0.8
1
n
There may be a pattern that restarts at x9 , depending on the decimal place to which the
solution is rounded.
(c) For r = 3.8 and x1 = 0.5:
x1
0.5
x2
0.95
x3
0.1805
x4
0.5621
x5
0.9353
x6
0.2298
x7
0.6726
x8
0.8369
x9
0.5188
x10
0.9487
1
xn+1=f(xn)
0.9
0.9
xn+1=xn
0.8
cobweb
0.8
0.7
0.7
0.6
xn
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
1
2
3
4
5
6
7
8
9
10
0
0
0.2
0.4
0.6
n
There doesn’t seem to be any observable pattern in the solution.
Matlab code
r = 3.2; % define parameter (change manually for parts b and c)
x = []; % defines x as an empty vector
x(1) = 0.513; % sets the first entry in x to be the given x_1 (change
% manually for parts b and c)
f = @(x) r*x.*(1-x); % define map as a function of x
N=10; % maximum n
% this for-loop evaluates the solution through n=10 and puts
% the solution at each successive time point in the vector x
for n=1:N-1
x(n+1) = f(x(n));
end
3
0.8
1
% print the solution as a column vector in the command window
% (no semi-colon)
x'
% plot and label the solution in the specified range
plot(x,'-o')
xlabel('n')
ylabel('x_n')
axis([1 N 0 max(x)])
Note: Any single quotations in the code will not copy correctly into Matlab (a LA TE X issue), so you
will need to retype them after pasting the code into the Editor.
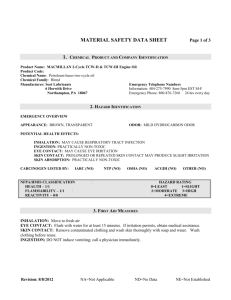
3. Feigenbaum diagram of the logistic map
1
0.9
0.8
0.7
Stability of x*=(r−1)/r
for 1<r<3
x50
0.6
0.5
Stable 2−cycle
chaos
0.4
0.3
Stable 4−cycle
0.2
Stability of x*=0
for 0<r<1
0.1
0
0
0.5
1
1.5
2
r
4
2.5
3
3.5
4
Homework 4.2 Solutions
1. (a) Fixed points:
p∗ = p∗ 2 − q ∗
q ∗ = p∗ q ∗ − 100p∗
has 3 solutions in the form P = (p∗ , q ∗ ): P1 = (0, 0), P2 = (11, 110) and P3 = (−9, 90) .
Stability: The Jacobian for this system is
2p∗
−1
∗ ∗
J(p , q ) = ∗
q − 100 p∗
0
−1
For P1 = (0, 0): J(0, 0) =
, which has eigenvalues λ1 = −10 and λ2 = 10.
−100 0
Since |λ1,2 | > 1, P1 is unstable.
22 −1
, which has eigenvalues λ1 = 12 and λ2 = 21.
For P2 = (11, 110): J(11, 110) =
10 11
Since |λ1,2 | > 1, P2 is unstable.
−18 −1
, which has eigenvalues λ1 = −19 and
For P3 = (−9, 90): J(−9, 90) =
−10 −9
λ2 = −8. Since |λ1,2 | > 1, P3 is unstable.
(b) Fixed points:
x∗ = rx∗ − x∗ 2 + x∗
has 2 solutions, x∗ = 0, r .
Stability: Since this is a one-dimensional system, we can look at the derivative of the righthand side evaluated at the fixed points to determine stability. If f (xn ) = rxn − x2n + xn ,
then f 0 (xn ) = r − 2xn + 1.
For x∗ = 0: f 0 (0) = r + 1, which implies stability provided |r + 1| < 1. But, since r > 0,
this can never happen. Thus, the fixed point x∗ = 0 is always unstable.
For x∗ = r: f 0 (r) = 1 − r, which implies stability provided |1 − r| < 1. So the fixed point
x∗ = r is stable when 0 < r < 2 and unstable for r > 2.
Bifurcation diagram
(solid line: stable, dashed line: unstable)
5
5
4.5
4
3.5
x
*
3
2.5
2
1.5
1
0.5
0
0
1
2
3
4
5
r
2. (a) When aR + pJ = 1 and aJ + pR = 1, Jn + Rn = Jo + Ro . We can see this by adding Rn+1
and Jn+1 .
Rn+1 + Jn+1 = (aR + pJ )Rn + (aJ + pR )Jn
Because the total amount of feeling (Jn + Rn ) is preserved, this mode is called feeling
preserving.
(b) Fixed points:
R ∗ = aR R ∗ + p R J ∗
J ∗ = p J R ∗ + aJ J ∗
0 = (aR − 1)R∗ + pR J ∗
J ∗ = pJ R∗ + (aJ − 1)J ∗
∗ 0
aR − 1
pR
R
=
0
J∗
pJ
aJ − 1
The determinant of this matrix is (aR − 1)(aJ − 1) − (pR pJ ). Substituting 1 − aR = pJ and
1 − aJ = pR , we see that the determinant is 0. Because the determinant is 0, we know that
pJ
the two equations are redundant and we can write J ∗ in terms of R∗ . So J ∗ = 1−a
R∗ .
J
(c) The Jacobian matrix is:
a
p
A= R R
pJ aJ
To find the eigenvalues we must find the determinant of A − λI.
aR − λ
pR
A − λI =
pJ
aJ − λ
Then, the det A − λI = (aR − λ)(aJ − λ) − pR pJ or
det A − λI = λ2 − λ(aR + aJ ) + (−1 + aJ + aR ). To find the values of λ set detA − λI = 0.
6
Therefore,
p
1
λ1,2 = (aR + aJ ± (aR + aJ )2 − 4(−1 + aJ + aR ))
2
p
1
λ1,2 = (aR + aJ ± (2 − aR − aJ )2 )
2
λ1 = 1
λ2 = aR + aJ − 1
7