Chapter 3: Assorted notions: navigational and non-linear distances
advertisement

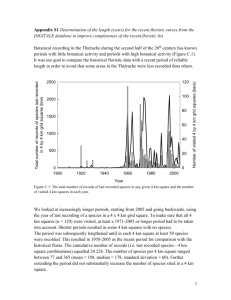
Chapter 3: Assorted notions: navigational plots, and the measurement of areas and non-linear distances Introduction Before we leave the basic elements of maps to explore other topics it will be useful to consider briefly two further applications of these ideas. The first is navigation and the second relates to the special problems presented by the analysis of non-linear distances and areas bounded by curvilinear borders. Navigation Navigation, in the broadest sense, refers to the techniques used in getting around from place to place. When we travel anywhere, such as from home to University, we unconsciously follow a preprogrammed route in our brain that depends on us identifying various landmarks that we relate to a mental image of the area in which we live and work. Most of our navigation is of that sort. Frequently we use a road map for navigation, using its alphanumeric address system to move through unfamiliar areas of the city. Once again, this process of getting from A to B involves a series of linked steps in which map locations are matched up with the corresponding features on the ground. Navigation necessarily becomes more abstract, however, as the landmark features on the ground become fewer or more difficult to identify. Getting lost on a featureless plain or in a forested area really is quite easily done! In the extreme, navigation over open water often relies on the navigator's skill at linking courses between geographic coordinates and not places as such at all. Here navigation involves the accurate plotting of courses on a map or chart using distances and bearings. Obviously the exercise involves thorough familiarity with map scales, and the ability to efficiently switch back and forth between true bearings on the chart and the magnetic compass heading shown on the boat. Ultimately, of course, it also involves the fundamental skill of determining position at sea. This chapter is not designed to turn you into navigators but familiarity with the principles involved will give you a feel for the task. Navigation by 'dead reckoning' involves the conversion of speed and time to distance. For example, a boat cruising on a particular bearing at 15 km/hour for 2 hours clearly will travel 30 km on that course provided there are no currents or wind . If the point of departure is known the new position after 2 hours is easily plotted on the appropriate chart. In this regard it may be useful to note that, conventionally, a ship's speed is almost always specified in a unit termed a knot. A speed of one knot is one nautical mile per hour; a nautical mile is the distance on the earth's surface subtended by one minute of latitude (about 1854 metres or 6080 feet or 1.15 English miles); so one knot is 1.85 km/hour. A common mistake 32 Chapter 3: Assorted notions 3.1: Graphical resolution of ship movement and ocean-currents. Examples of a ship's heading and velocity as a resultant of its still-water motion and an ocean current. to be avoided is to refer to nautical speeds as so many 'knots per hour'. The unit “knot” is a speed and knots per hour, therefore, implies an acceleration! When currents, or to a lesser extent winds, are present along a vessel's course, the dead reckoning principle must be adjusted to accommodate their influence. When a current flows in the exact same direction as the vessel's course, the ship's speed with respect to the land will be its speed through the water plus the speed of the current. Conversely, an exactly opposing current must be subtracted from the vessel's speed through the water in order to determine its true speed with respect to the land. The effects of all other currents must be evaluated as the resultant of the ship's direction and speed and those of the current involved. Such an integration can be determined graphically as the vectorial resultant (diagonal) in a parallelogram of vectors; examples are illustrated in Figure 3.1. Measurement of non-linear distances Non-linear distances are not as readily determined as their linear counterparts. Although it is possible to measure distance along a curved line as the sum of a series of linked linear segments, this process is far too tedious for most applications. Certainly, it is unmanageable for calculating distances over a long and complex curved boundary. Yet curved or irregular lines invariably are what we face in dealing with the analysis of map data. As we noted in Chapter 1, curved lines can be measured by following them with a piece of string 33 Chapter 3: Assorted notions and then stretching it out against the line scale on the map. Another method involves stepping off the line distance with dividers or marking the increments along the edge of a piece of paper as it is rotated along the line. Either method will produce an acceptable result if used carefully. Alternatively, a measurement wheel can be rolled along the curved line, the number of revolutions being proportional to the distance covered. It is important to recognize, however, that all of these methods involve generalization of the line in the sense that not every minute convolution is accounted for by counting some measurement increment, no matter how small it may be. In other words, the calculated line distance will always be less than the true distance. In some cases, this difference may be very important and the generalized distance may be quite misleading. For example, to use a familiar task, plotting the generalized distance along roads between two distant cities shown on a Provincial road map might lead us to derive a particular travel time that probably is significantly too short because not all the convolutions are shown in the road. Of course, for some purposes, knowing the generalized distance may be just as, or more, useful than knowing the actual distance. An example of the effect of the size of the measurement increment on the measured length of a convoluted line is shown in Figure 3.2. 3.2: Length measurement in relation to measurement increment Many lines on maps, such as the trace of a tortuously meandering river, are distinctly irregular and convoluted and their measured length is significantly dependent on the size of increment (divider spacing) used to obtain the measurement. Here a trace A-B is seen to double in apparent length as the measurement increment varies between 12 and 2 mm. Note the extreme sensitivity to change at the fine end of the measurement-increment scale. This problem of the dependency of apparent lengths of non-linear curves on the measurement increment is particularly troublesome in relation to highly convoluted traces such as certain river courses and most coastlines. The problem also is encountered if the measurement increment is fixed but maps at 34 Chapter 3: Assorted notions a variety of scales are considered. As the map scale becomes smaller the apparent length of coastlines significantly declines because of the effect of line generalization. For this reason, detailed morphometric analyses of the land surface from maps (or aerial photographs) should specify both the scale of the map and the measurement increment used to obtain the data. Measurement of areas The measurement of areas bounded by irregular or curved borders can be achieved in several ways. Areas bounded by linear segments simply can be subdivided into a series of regular shapes (squares, rectangles, and triangles) and their sub-areas summed to yield the total area (Figure 3.3B). Even areas enclosed by curved boundaries can be approximated by summing the sub-areas formed by a series of 'best-fit' or approximating linear segments (Figure 3.3A). The key to successful application of this method is to chose the minimum number of line segments which accurately approximate the curved boundary. Every area lying outside of the approximating segment is excluded and leads to underestimation of the total area. Such excluded areas therefore must be balanced elsewhere by equivalent included areas. Obviously the technique requires a little practice and often some trial and error line placement but the requisite skills are quite easily acquired in a short time and the method is accurate enough (±10%) for many purposes. You might note when applying this method that it is sometimes easier to compute the area of an irregular geometric shape by enclosing it in a rectangular envelope and subtracting from the area of the rectangle the sum of the areas of the external sub-areas (Figure 3.3C). 3.3: Area calculations based on the summation of component sub-areas A Approximating a curvilinear boundary with straight-line segments. B Internal division of an irregular geometric shape into regular sub-areas. C Using an external envelope to determine the area of an irregular geometric shape by subtraction. 35 Chapter 3: Assorted notions The appropriate area calculations for the component sub-areas are: squares and rectangles: length x breadth triangles: length x perpendicular height 2 An alternative and easier means of measuring areas on maps is based on a spatial integrating instrument called a polar planimeter. This instrument, shown in Figure 3.4, consists of an articulated arm at one end of which is a fixed pivot and at the other a tracing point. At the articulation link are two rotating wheels which run on the map and record the tracer motion in the x-y directions; the two motions are mechanically integrated to provide a reading of the area on a small recording drum. The tracing point is used to follow the outline of the border in a clockwise direction from an arbitrary start-point, returning exactly to the same point to complete the trace. The mechanical integration of polar planimeters is never perfect, however, and the trace should be repeated two or three times from different start-points to provide an average area computation. If you are unsure of the units of area shown on the planimeter drum scale, a ready check can be made by tracing off one or more of the grid squares on the map. 3.4: The fixed-arm polar planimeter. 36 Chapter 3: Assorted notions Unfortunately, polar planimeters are quite expensive and in many circumstances you may not have access to one. Thus, it is often necessary to rely on a simpler and more readily accessible techniques such as the sub-area method described above. Another rather more exotic method, noted here more for the sake of completeness than practicality, involves cutting out a tracing of the border made on special highly uniform paper and weighing it for conversion to a surface area. Obviously an accurate balance is needed to use this technique. When a polar planimeter is unavailable and the sub-areas method is too tedious (if too large an area bounded by a highly convoluted border is involved, for example) a far more commonly used technique is to estimate areas of irregular shapes by counting the squares of a superimposed grid. The technique of grid counting to determine irregular areas on maps is illustrated in Figure 3.5. Here the number of whole and partial grid squares enclosed by the area boundary are counted and summed. Partial grid squares are counted as half squares regardless of the actual proportion of the square included. It is assumed that, on average, the mean proportion for partial squares approaches 0.5 since larger proportional areas are balanced by smaller areas. In this example there are 23 whole grid squares and 45 partial squares for a total of 45.5 grid squares. The map grid has a one centimetre 2 spacing and if the scale were 1:50 000, each grid square would represent 250 000 m (500 m x 500 2 m) or 0.25 km . Thus, the area within the irregular boundary shown in Figure 3.5 would be 45.5 x 2 2 0.25 km = 11.4 km . 3.5: Measurement of the area of an irregular map shape by the grid-square counting method. 37 Chapter 3: Assorted notions Obviously this 'finite step' solution to approximating the irregular area becomes increasingly more accurate as the size of the grid square relative to the measured area declines. But so does the tedium of counting so many small grid squares also increase! Clearly some sensible compromise must be struck between effort and accuracy. It is difficult to provide guidelines here because much depends on the shape of the area being measured but a useful 'rule of thumb' is that one grid square should not represent more than about three per cent of the total area. In the example above the grid square area is about 2% of the area being measured. 38 Chapter 3: Assorted notions 39