Document 12061882
advertisement

Available at
http://pvamu.edu/aam
Appl. Appl. Math.
Applications and Applied
Mathematics:
An International Journal
(AAM)
ISSN: 1932-9466
Vol. 8, Issue 1 (June 2013), pp. 191 – 213
An -Uniform Numerical Method for a System of Convection-Diffusion
Equations with Discontinuous Convection Coefficients and Source Terms
T. Valanarasu1, R. Mythili Priyadharshini2, N. Ramanujam3 and A. Tamilselvan3
1
2
Department of Mathematics
Bharathidasan University College
Perambalur - 621 107, Tamilnadu, India
valan_tmj@yahoo.co.in
Department of MACS
National Institute of Technology Karnataka
Mangalore - 575 025, Karnataka, India
mythiliroy7777@yahoo.co.in
3
Department of Mathematics
Bharathidasan University
Tiruchirappalli - 620 024, Tamilnadu, India
matram2k3@yahoo.com; atsga@yahoo.com
Received: March 28, 2012; Accepted: February 13, 2013
Abstract
In this paper, a parameter-uniform numerical method is suggested to solve a system of singularly
perturbed convection-diffusion equations with discontinuous convection coefficients and source
terms subject to the Dirichlet boundary condition. The second derivative of each equation is
multiplied by a distinctly small parameter, which leads to an overlap and interacting interior
layer. A numerical method based on a piecewise uniform Shishkin mesh is constructed.
Numerical results are presented to support the theoretical results.
Keywords: Singular perturbation problems, Shishkin mesh, discontinuous convection
coefficients
MSC 2010 No.: 65L10
1. Introduction
Singular perturbation problems (SPPs) arise in various fields of applied mathematics such as
fluid dynamics, elasticity, quantum mechanics, electrical networks, chemical reactor-theory, bio191
192
T. Valanarasu et al.
chemical kinetics, gas porous electrodes theory, aerodynamics, plasma dynamics, oceanography,
diffraction theory, reaction-diffusion processes and many other areas. Examples of SPPs include
the linearized Navier-Stokes equation of fluid at high Reynolds number, heat transportation
problem with large Peclet numbers, magneto-hydrodynamics duct problems at Hartman number
and drift diffusion equation of semiconductor device modeling. It is a well-known fact that the
solutions of the SPPs have a multi-scale character (non-uniform behaviour), that is, there are thin
layer(s)(Boundary layer region) where the solution varies rapidly but when distant from the
layer(s)(Outer region) the solution behaves regularly and varies slowly. There is a vast literature
dealing with SPPs with smooth coefficients and source term for single equation (see Miller et al.
(1996) – Farrel et al. (2000a) and references therein) and for system of differential equations (see
Mathews (2000) – Tamilselvan and Ramanujam (2010) and references therein). Recently, a few
authors have developed uniform numerical methods for SPPs with non-smooth data, that is,
discontinuous source term and/or discontinuous convection coefficient and/or discontinuous
diffusion coefficient for single equation Farrell et al. (2000b) – Mythili and Ramanujam (2009)
and for system of equations Tamilselvan et al. (2007, 2010).
In Matthews et al. (2000a, 2000b), the authors studied a system of two coupled singularly
perturbed reaction-diffusion equations for the cases 0 < 1 = 2 1 and 0 < 1 2 = 1 . It is
shown that a parameter robust numerical method can be constructed which gives first order
convergence. Madden and Stynes (2003) examined the same problem for the cases
0 < 1 2 1 . The solution to the system has boundary layers that overlap and interact. The
structure of these layers was analysed and this led to the construction of a piecewise uniform
mesh that is a variant of the usual Shishkin mesh. They showed that the scheme is almost first
order uniform convergence in the perturbation parameters. In Valanarasu and Ramanujam
(2004), the authors proposed an asymptotic numerical initial value method to solve a system of
two coupled singularly perturbed convection-diffusion equations which involves solving a set of
initial value problems and a system of terminal value problem by fitted operator method. Cen
(2005) has examined the same for the case 0 < 1 2 < 1 , which leads to an overlap and
interacting boundary layer.
In this paper, a system of singularly perturbed convection-diffusion equations with discontinuous
convection coefficients and source terms are considered on the unit interval = (0,1). A single
discontinuity in the convection coefficients and source terms are assumed to occur at a point
d . It is convenient to introduce the notation = (0, d ), = (d ,1) and to denote the jump
at d in any function with [ w](d ) = w(d ) w(d ). In fact, we consider the following class of
problems: find
y1 , y2 C 0 () C1 () C 2 ( )
such that
L1 y 1 y1 a1 ( x) y1 b11 ( x) y1 b12 ( x) y2 = f1 ( x),
L2 y 2 y2 a2 ( x) y2 b21 ( x) y1 b22 ( x) y2 = f 2 ( x), x ,
(1)
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
193
with the boundary conditions
y1 (0) = p,
y 2 (0) = q,
y1 (1) = r ,
(2)
y 2 (1) = s.
Assume that
| [a1 ](d ) | C , | [a2 ](d ) | C , | [ f1 ](d ) | C , | [ f 2 ](d ) | C ,
1* > a1 ( x) > 1 > 0,
x < d,
2* < a1 ( x) < 2 < 0,
d < x,
1* > a 2 ( x) > 1 > 0,
x < d,
2* < a 2 ( x) < 2 < 0,
d < x,
b12 ( x) 0,
b21 ( x) 0 ,
b11 ( x) b12 ( x) 0,
b21 ( x) b22 ( x) 0,
x .
The parameters 1 , 2 (0,1) and without loss of generality we shall assume that
0 < 1 2 < 1. The functions ai ( x), f i ( x) for i = 1, 2 are assumed to be sufficiently smooth on
{0,1} and the function bij (x) for i, j = 1, 2 are to be sufficiently smooth on . The
function ai ( x), f i ( x) for i = 1, 2 are assumed to have a single jump discontinuity at the point
d . In general this discontinuity give raise to interior layers in the solutions of the problems.
Because ai ( x), f i ( x) for i = 1, 2 are discontinuous at d , the solution y = ( y1 , y 2 ) T of (1) - (2)
does not necessarily have continuous second derivative at the point d . The above weakly
coupled system of singularly perturbed boundary value problem can be written in the vector form
as
d2
1
L y
dx 2
Ly 1
L2 y 0
with the boundary conditions
p
y (0) = ,
q
where
r
y (1) = ,
s
y A( x) y ' B( x) y = f ( x),
d2
2 2
dx
0
x ,
194
T. Valanarasu et al.
0
a ( x)
b ( x) b12 ( x)
f ( x)
, B( x) = 11
and f ( x) = 1 .
A( x) = 1
a2 ( x )
0
b21 ( x) b22 ( x)
f 2 ( x)
Note:
Throughout this paper, C denotes a generic constant (sometimes subscripted) which is
independent of the singular perturbation parameters 1 , 2 and the dimension of the discrete
problem N . Let y : D , D . The appropriate norm for studying the convergence of
numerical solution to the exact solution of a singular perturbation problem is the maximum norm
|| y || D = sup | y ( x) | . In case of vectors y , we define | y ( x) | = ( | y1 ( x) |, | y 2 ( x) | ) T and
xD
|| y || D = max {|| y1 || D , || y 2 || D }. Throughout the paper, we shall also assume that 1 C N 1
and 2 C N 1 as is often assumed for convection dominated problems.
Remark 1.1.
For simplicity, we are considering the functions b11 , b12 , b21 and b22 are sufficiently smooth on
. If we allow a simple jump discontinuity at x = d for those functions, the results of this paper
remain true. The sign condition imposed on a1, a2 is motivated by the argument given in Farrel
et al. (2004a) for single equation.
2. Preliminaries
In this section, first we prove the existence of a solution of the BVP (1)-(2). Then we derive a
maximum principle and stability result for the same. Further bounds for the solution, smooth and
singular components and their derivatives are derived.
Theorem 2.1.
The BVP (1)-(2) has a solution such that y1 , y2 C 0 ( ) C 1 () C 2 ( ).
Proof:
The proof is by construction. Let u = (u1 , u2 )T and u = (u1 , u2 )T be particular solutions of the
following systems of equations
d2
1 2
dx
0
and
x ,
2 u ( x ) A( x ) u ( x ) B ( x ) u ( x ) = f ( x ),
d
2 2
dx
0
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
d2
1 2
dx
0
195
u ( x) A( x) u ( x) B( x) u ( x) = f ( x),
d2
2 2
dx
0
Also let and
x .
be the solutions of the following BVPs
d2
1 2
dx
0
( x) A( x) ' ( x) B( x) ( x) = 0 , x , (0) = 1 , (1) = 0 ,
d2
2 2
dx
d2
1 2
dx
0
( x) A( x) ' ( x) B( x) ( x) = 0 ,
d2
2 2
dx
0
and
0
x , (0) = 0 , (1) = 1 ,
respectively. Here 0 = (0, 0) T and 1 = (1, 1) T . Then, u can be written as
y1 (0) u1 (0)
0
( x) K ( x), x ,
u
(
x
)
0
y 2 (0) u 2 (0)
y ( x) =
0
u ( x) y1 (1) u1 (1)
( x) K * ( x), x ,
0
y 2 (1) u 2 (1)
where K and K * are matrices with constant entries to be chosen suitably. Note that on the open
interval , 0 < , < 1 , and , cannot have internal maximum or minimum and hence
' < 0 , ' > 0 , x .
k
We wish to choose the matrices K = 1
0
is, we impose the conditions
y (d ) = y (d ) and
0
k1*
*
and K =
k 2
0
y ' (d ) = y ' (d ).
For the matrices K and K * to exist is required that
0
so that y1 , y 2 C 1 () . That
*
k2
196
T. Valanarasu et al.
1 (d )
0
1 (d )
0
0
2 (d )
0
2 ( d )
1 (d )
0
1 (d )
0
0
2 (d )
0
2 (d )
0.
This follows from observing the fact that ( 2 2 2 2 ) (1 1 1 1 ) > 0.
Theorem 2.2. (Maximum Principle)
Suppose that a function y ( x) = ( y1 ( x), y 2 ( x) ) T , y1 , y 2 C 0 ( ) C 2 ( ) satisfies
y (0) 0 , y (1) 0 , L1 y ( x) 0, L2 y ( x) 0, x and [ y ' ](d ) 0 . Then,
y ( x ) 0 , x .
Proof:
Define s ( x) = ( s1 ( x), s 2 ( x)) T as
1/2 x/8 d/8, x {0, d }
s1 ( x) = s2 ( x) =
1/2 x/4 d/4, x {1},
where s1 , s 2 C 0 ( ) C 2 ( ).
Then, s (x ) > 0 , for all x and Ls ( x) > 0 ,
= max max x (
x . We define
y1
y
)( x), max x ( 2 )( x) .
s1
s2
Then, > 0 and there exists a point x0 such that either (
both. Further, x0 or x0 = d . Also ( y s )( x) 0 ,
y
y1
)( x0 ) = or ( 2 )( x0 ) = or
s1
s2
x .
Case (i): ( y1 s1 )( x0 ) = 0, for . Therefore, ( y1 s1 ) attains its minimum at x0 . Then,
0 < L1 y ( x) 1 ( y1 s1 )( x) a1 ( x)( y1 s1 )( x) b11 ( x)( y1 s1 )( x)
b12 ( x)( y2 s2 )( x) 0,
which is a contradiction.
Case (ii): Similarly, we can consider the case ( y2 s2 )( x0 ) = 0, for x0 and arrive at a
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
197
contradiction.
Case (iii): ( y1 s1 )( x0 ) = 0, for x0 = d . Therefore ( y1 s1 ) attains its minimum at x0 . Then,
0 [( y1 s1 )]( x0 ) = [ y1 ](d ) [ s1 ](d ) < 0,
which is a contradiction.
Case (iv): Similarly, we can consider the case ( y2 s2 )( x0 ) = 0, for x0 = d and arrive at a
contradiction.
Hence, y ( x) 0 ,
x .
Theorem 2.3. (Stability Result)
If
y1 , y 2 C 0 ( ) C 1 () C 2 ( ) ,
then
| y j ( x) | C max{| y1 (0) |, | y1 (1) |, | y2 (0) |, | y2 (1) |, || L1 y ||
, || L2 y ||
},
x ,
j = 1, 2 .
Proof:
Set
A = C max{| y1 (0) |, | y1 (1) |, | y 2 (0) |, | y 2 (1) |, || L1 y ||
, || L2 y ||
}.
Define two barrier functions w ( x) = ( w1 ( x), w2 ( x))T as
A(1/2 x/8 d/8) y j ( x), x d ,
w j ( x) =
A(1/2 x/4 d/4) y j ( x), x > d , j = 1,2.
Further, we observe that
w (0) 0 ,
'
w (1) 0 ,
L1 w ( x) 0,
L2 w ( x) 0
and [ w ]( d ) 0 , by a proper choice of A . Then, w ( x) 0 ,
which completes the proof.
x , by Theorem 2.2,
198
T. Valanarasu et al.
To derive parameter uniform error estimates we need sharper bounds on the derivatives of the
solution y. Consider the following decomposition of the solution y = v w , into a non-layer
component v = (v1 , v2 )T and an interior layer component w = ( w1 , w2 )T . Define the discontinuous
functions v0 = (v01 , v02 )T and v1 = (v11 , v12 )T to be respectively the solutions of the problems
A( x) v0 B( x) v0 = f ( x),
x , v0 (0) = y (0), v0 (1) = y (1),
and
1 d2
2 dx 2
A( x) v1 B ( x) v1 =
0
v ,
0
1 d2
1 dx 2
0
x , v1 (0) = 0, v1 (1) = 0.
We define the discontinuous functions v and w respectively by
L v = f ( x),
x ,
(3)
v (0) = y (0), v ( d ) = v0 ( d ) 1 2 v1 ( d ),
v (d ) = v0 (d ) 1 2 v1 (d ), v (1) = y (1),
(4)
and
L w = 0,
x ,
w (0) = 0 ,
[ w ]( d ) = [v ]( d ),
(5)
[ w ' ]( d ) = [v ' ]( d ),
w (1) = 0 .
(6)
Note that y = v w is in C 1 (). The following lemma provides the bound on the derivatives of
the nonlayer and interior components of the solution y.
Lemma 2.4.
Let v and w be the solution of the BVP (3) - (4) and (5) - (6) respectively. Then there exists a
constant C such that for all x we have for j = 1,2 ,
|| v (jk ) || C , k = 0, 1, 2, 3,
and
CB ,
| w j ( x) | 2
CB 2 ,
x ,
x ,
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
199
C (11B 21B ), x ,
1
2
| w ( x) |
1
1
C (1 B1 2 B 2 ), x ,
C (12 B 22 B ), x ,
'
1
2
| w1 ( x) |
2
2
C
(
B
B
x ,
1 1
2
2 ),
C (13 B 23 B ), x ,
'
1
2
| w1 ( x) |
3
3
C (1 B1 2 B 2 ), x ,
C 21B , x ,
| w ( x) | 1 2
C 2 B 2 , x ,
C 22 B , x ,
'
| w2 ( x) | 1 2
C 2 B 2 , x ,
C 21 (12 B 22 B ), x ,
'
2
| w2 ( x) | 1 2 1
2
C 2 (1 B1 2 B 2 ), x ,
'
1
'
2
where
B = exp( (d x)/ 1 ),
B = exp( (d x)/ 2 ),
B = exp( ( x d )/ 1 ),
B = exp( ( x d )/ 2 ) and = min{ 1 , 2 }.
1
2
and
1
2
Proof:
Using appropriate barrier functions, applying Theorem 2.2 and adopting the method of proof
used in Cen (2005), the present lemma can be proved.
3. Discrete Problem
The BVP (1) - (2) is discretised using a fitted mesh method composed of a finite difference
operator on a piecewise uniform mesh. When 0 < 1 < 2 1, the solution of (1) - (2) has
overlapping interior layer at x = d . This necessitates the construction of a mesh that is uniform
on each of six subintervals. We define
2
2
d 2
1 = min , 2 , 1 ln N
4 2
1 d 2
1 d 2 2
= min
,
ln N , = min
, 2 , 1 ln N .
1
4
2
2
d 2
= min , 2 ln N ,
2
A piecewise uniform mesh N , is constructed by dividing [0,1] into six subintervals
1 2
[0, d ], [d , d ], [d , d ], [d , d ], [d , d ] and
2
2
1
1
1
1
2
[d , 1].
2
Then, subdivide [0, d ] and [d , 1] into N/4 mesh intervals and subdivide each of the
2
2
200
T. Valanarasu et al.
other four intervals into N/8 mesh intervals. The interior points of the mesh are denoted by
N , = {xi : 1 i
1 2
N
N
1} {xi : 1 i N 1}.
2
2
Clearly x N/2 = d and N , = {xi }0N . The step sizes of the mesh N , satisfy
1 2
1 2
4(d )
2
,
1 i N/4,
H1 =
N
8( )
2
1
N/4 i 3 N/8,
,
H2 =
N
8
1
H3 =
,
3 N/8 i N/2,
N
hi =
8
1
H4 =
N/2 i 5 N/8,
,
N
8( )
2
1
H =
, 5 N/8 i 6 N/8,
5
N
4(1 d )
2
H 6 =
,
6 N/8 i N .
N
When = /2 and = /2, then 2 = O(1 ) and the result can be easily obtained.
1
2
1
2
Therefore, we only consider the cases < /2 and < /2. Then the fitted mesh finite
1
2
1
2
difference method is to find Y ( xi ) = (Y1 ( xi ), Y2 ( xi )) for i = 0,1, , N such that for xi N , ,
T
1 2
L1N Y ( xi ) 1 2Y1 ( xi ) a1 ( xi ) DY1 ( xi ) b11 ( xi ) Y1 ( xi ) b12 ( xi ) Y2 ( xi ) = f1 ( xi ),
N
2
L2 Y ( xi ) 2 Y2 ( xi ) a2 ( xi ) DY2 ( xi ) b21 ( xi ) Y1 ( xi ) b22 ( xi ) Y2 ( xi ) = f 2 ( xi ),
(7)
Y1 ( x0 ) = y1 (0),
Y2 ( x0 ) = y 2 (0),
(8)
D Y1 ( x N/2 ) = D Y1 ( x N/2 ),
D Y2 ( x N/2 ) = D Y2 ( x N/2 ),
Y1 ( x N ) = y1 (1),
Y2 ( x N ) = y 2 (1),
where
( D D )Y j ( xi )
D Y j ( xi ), i < N / 2
2
DY j ( xi ) =
, Y j ( xi ) =
,
( xi 1 xi 1 ) / 2
D Y j ( xi ), i > N / 2
Y j ( xi 1 ) Y j ( xi )
Y j ( xi ) Y j ( xi 1 )
D Y j ( xi ) =
, and D Y j ( xi ) =
, for j = 1, 2.
xi 1 xi
xi xi 1
The difference operator LN can be defined as
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
201
LN Y ( xi ) 1 2
0
LN Y ( xi ) 1N
Y ( xi ) A( xi ) DY ( xi ) B ( xi ) Y ( xi )
2
L
Y
(
x
)
0
i
2
2
N
= f ( xi ), xi , ,
1 2
Y ( x0 ) = y (0), D Y ( xN /2 ) = D Y ( xN /2 ), Y ( xN ) = y (1).
3.1. Numerical Solution Estimates
Analogous to the continuous results stated in Theorem 2.2 and Theorem 2.3 one can prove the
following result.
Theorem 3.1.
For any mesh function Z ( xi ) , assume that
D Z j ( x N/2 ) D Z j ( x N/2 ) 0 ,
Z j ( x0 ) 0, Z j ( x N ) 0,
for j = 1, 2 , and LN Z ( xi ) 0 , xi N , . Then Z ( xi ) 0 ,
1 2
xi N , .
1 2
Proof:
As in the continuous case, assume that the theorem is not true. Let S = ( S1 , S 2 )T , be
1/ 2 xi / 8 d / 8, 1 i N / 2,
S1 ( xi ) = S 2 ( xi ) =
1/ 2 xi / 4 d / 4, N / 2 1 i N .
Define
Z1
Z2
( xi ), max
( xi ) .
0 i N
S2
0 i N S1
= max max
It is obvious that, > 0 and Z ( xi ) S ( xi ) 0 for i = 0(1) N . Further, there exists
one i* {1, 2, ..., N } such that either Z1 ( x * ) S1 ( x * ) = 0 or Z 2 ( x * ) S 2 ( x * ) = 0 or both.
i
Also either x *
N
i
i
i
i
or x * = x N/2 .
1 , 2
i
Case (i): x * N , and Z1 ( x * ) S1 ( x * ) = 0. Then for x * < x N/2 , we have
i
i
1 2
i
i
L1N ( Z ( x * ) S ( x * )) = 1 2 ( Z1 ( x * ) S1 ( x * )) a1 ( x * ) D ( Z1 ( x * ) S1 ( x * ))
i
i
i
i
i
i
i
202
T. Valanarasu et al.
b11 ( x * )( Z1 ( x * ) S1 ( x * )) b12 ( x * )( Z 2 ( x * ) S 2 ( x * )) 0,
i
i
i
i
i
i
a contradiction. Also for x * > x N/2 , we have
i
L1N ( Z ( x * ) S ( x * )) = 1 2 ( Z1 ( x * ) S1 ( x * )) a1 ( x * ) D ( Z1 ( x * ) S1 ( x * ))
i
i
i
i
i
i
i
b11 ( x * )( Z1 ( x * ) S1 ( x * )) b12 ( x * )( Z 2 ( x * ) S 2 ( x * )) 0,
i
i
i
i
i
i
a contradiction.
Case (ii): Similarly, we can consider the case x * N , and Z 2 ( x * ) S 2 ( x * ) = 0, and arrive
i
i
1 2
i
at a contradiction.
Case (iii): x * = x N/2 . Then,
i
D ( Z1 ( x * ) S1 ( x * )) D ( Z1 ( x * ) S1 ( x * )) 0, if
i
i
i
i
Z1 ( x * ) S1 ( x * ) = 0 ,
i
i
or
D ( Z 2 ( x * ) S 2 ( x * )) D ( Z 2 ( x * ) S 2 ( x * )) 0, if
i
i
i
i
Z 2 ( x * ) S 2 ( x * ) = 0,
i
i
which is a contradiction. Hence, we get the desired result.
Theorem 3.2 .
If Y j ( xi ) is the solution of the problem (7), then
| Y j ( xi ) | C ,
j = 1,2,
xi N , .
1 2
To bound the nodal error | (Y y )( xi ) |, we define mesh functions VL and VR , which
approximate v respectively to the left and right of the point of discontinuity x = d . Then, we
construct mesh functions WL and WR , so that the amplitude of the jump WR (d ) WL (d ) is
determined by the size of the jump | [v ](d ) | . Also WL and WR , are sufficiently small away from
the interior layer region. Using these mesh functions the nodal error | (Y y )( xi ) | is then
bounded separately outside and inside the layer. Define the mesh functions VL and VR to be the
solutions of the following discrete problems respectively :
LNVL ( xi ) = f ( xi ), for i = 1,..., N/2 1,
VL ( x0 ) = v (0),
and
VL ( x N/2 ) = v (d ),
(9)
(10)
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
203
LNVR ( xi ) = f ( xi ), for i = N / 2 1, ..., N 1,
(11)
VR ( x N/2 ) = v (d ),
(12)
VR ( x N ) = v (1).
Now, we define the mesh functions WL and WR to be the solutions of the following system of
finite difference equations
LNWL ( xi ) = 0, for
i = 1, ..., N / 2 1,
(13)
LNWR ( xi ) = 0, for
i = N / 2 1, ..., N 1,
(14)
WL ( x0 ) = 0, WR ( xN ) = 0,
(15)
WR ( x N/2 ) VR ( x N/2 ) = WL ( x N/2 ) VL ( x N/2 ),
(16)
D WR ( x N/2 ) D VR ( x N/2 ) = D WL ( x N/2 ) D VL ( x N/2 ).
(17)
Now, we can define Y ( xi ) to be
VL ( xi ) WL ( xi ),
for i = 1, ..., N / 2 1,
Y ( xi ) = WR ( xi ) VR ( xi ),
for i = N / 2,
V ( x ) W ( x ) = V ( x ) W ( x ), for i = N / 2 1, ..., N 1.
L
i
R
i
R
i
L i
(18)
C
C
C
Since | Y ( x N/2 ) | , we have | WL ( x N/2 ) | and | WR ( x N/2 ) | . Using the arguments in
C
C
C
Cen (2005), for i N/4, we have
C N 1
,
| WL ( xi ) | | WL ( xN/2 ) | N 1
1
C
N
and
C N 1
.
| (WL w )( xi ) | | WL ( xi ) | | w ( xi ) |
1
C
N
Similarly, for i 3N/4, we have
C N 1
| WR ( xi ) | | WR ( xN/2 ) | N 1
1
C
N
and
(19)
204
T. Valanarasu et al.
C N 1
.
| (WR w )( xi ) | | WR ( xi ) | | w ( xi ) |
1
C N
(20)
Lemma 3.3.
At each mesh point xi N , , the regular component of the error satisfies the estimate for
1 2
j = 1, 2 ,
C xi N 1 ,
for i = 1, , N / 2 1,
| (V j v j )( xi ) |
1
C (1 xi ) N , for i = N / 2 1, , N 1,
where v and V are the solutions of (3) - (4) and (9) - (12) respectively.
Proof:
C N 1
. Using the two mesh functions
Consider the local truncation error, | L (V v )( xi ) |
1
C
N
( xi ) = ( xi ) (V v )( xi ), where for j = 1,2 ,
N
C xi N 1 / d , for i = 1, , N / 2 1,
j ( xi ) =
1
C (1 xi ) N / (1 d ), for i = N / 2 1, , N 1,
on the appropriate sides of the discontinuity, and applying discrete maximum principle, we
get ( xi ) 0 , xi N , , which completes the proof.
1 2
Lemma 3.4.
At each mesh point xi N , the singular component of the error satisfies the estimate
C N 1 (ln N ) 2
,
| (W w )( xi ) |
1
2
C N (ln N )
where w and W are the solutions of (5) - (6) and (13) - (17) , respectively.
Proof:
First we consider the case = =
2
2
2 2
ln N
and = =
1
(20), it follows that
| (WL w)( x N/4 ) | CN 1
and | (WR w)( x3 N/4 ) | CN 1 .
1
2 1
ln N . From (19) and
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
205
Adopting the procedure in Farrel et al. (2004a), Cen (2005, Theorem 3); using the inequality
t/
t/
1 k e 1 2 k e 2 for t > k1/ , k = 1,2,, and Lemma 2.4, we have
for j = 1, 2; i = N/4 1, , 3N/8,
(2)
| ( LNjWL L j w )( xi ) | j ( xi 1 xi 1 ) | w(3)
j ( xi ) | a j ( xi ) ( xi xi 1 ) | w j ( xi ) |
C N 1 ( ) 22 ,
2
1
and
for j = 1, 2;
i = 3 N/8 1, , N/2 1, we have
(2)
| ( LNjWL L j w )( xi ) | j ( xi 1 xi 1 ) | w(3)
j ( xi ) | a j ( xi ) ( xi xi 1 ) | w j ( xi ) |
C N 1 (12 22 ).
1
Similarly for j = 1, 2; i = N/2 1,, 5 N/8 1, we have
(2)
| ( LNjWR L j w )( xi ) | j ( xi 1 xi 1 ) | w(3)
j ( xi ) | a j ( xi ) ( xi 1 xi ) | w j ( xi ) |
C N 1 ( 12 22 ) ,
1
and for j = 1,2; i = 5 N/8, , 6 N/8 1, we have
(2)
| ( LNjWR L j w )( xi ) | j ( xi 1 xi 1 ) | w(3)
j ( xi ) | a j ( xi ) ( xi 1 xi ) | w j ( xi ) |
C N 1 ( ) 22 .
2
1
At the mesh point x N/2 = d , since ( D D ) W ( x N/2 ) = 0 we have
( D D ) W ( x N/2 ) ( D D ) w ( xN/2 ) = ( D D ) w ( xN/2 ).
Let H 3 and H 4 be the mesh interval size on either side of x N/2 . Thus,
| ( D D )(W w )( x N/2 ) | = | ( D D ) w ( x N/2 ) |
d
d
| ( D ) w (d ) | | ( D ) w (d ) |
dx
dx
1
1
H 4 | w ' ( xN/2 ) | H 3 | w ' ( xN/2 ) |
2
2
1
C N ( ) (12 22 )
1
1
.
C N 1 ( ) (1 2 2 2 )
1
1
206
T. Valanarasu et al.
Consider the mesh functions ( xi ) = ( xi ) (W w )( xi ), where for j = 1, 2 ,
( ) 22 ( xi (d )), for xi N , (d , d ),
1
2
1 2
2
1
2
2
2
N
(1 2 ) ( xi (d )), for xi , (d , d ),
1
1 2
1
j ( xi ) = C N 1 C N 1 1 2 2
N
1 (1 2 ) (d 1 xi ), for xi 1 , 2 (d , d 1 ),
N
2
( 2 1 ) 2 (d 2 xi ), for xi 1 , 2 (d 1 , d 2 ).
Applying the discrete maximum principle to j ( xi ), for
j = 1,2 over the interval
[d , d ], we get
2
2
( ) 2 22 , for xi N , (d , d ),
1
1 2
2
1
2
N
2
2
2
( ) (1 2 ), for xi , (d , d ),
1 2
1
| (W j w j )( xi ) | C N 1 C N 1 1 2 2
2
N
( 1 ) (1 2 ), for xi 1 , 2 (d , d 1 ),
2 2
xi N , (d , d ).
( 2 1 ) 2 , for
1 2
1
2
1
N
2
C N (ln N ) , for xi , (d , d ) ,
1 2
2
2
which is the required result.
Now we complete the proof by considering the case where at least one of the four transition
1 d
1 d
d
d
and =
.
points take the value = , = , =
1
2
1
2
4
2
4
2
In all such cases 11 C ln N and 21 C ln N . We have for j = 1, 2 ,
| ( LNjW L j w )( xi ) | j ( xi 1 xi 1 ) | w'j ( xi ) | a j ( xi ) ( xi 1 xi ) | w'j ( xi ) | CN 1 (ln N ) 2
and
| ( D D )(W j w j )( xN/2 ) | = | ( D D ) w j ( xN/2 ) | C N 1 (ln N ) 2 .
Using the mesh functions
(1 d ) xi ,
j ( xi ) = C N 1 (ln N ) 2
d (1 xi ),
for
for
xi , (0, d )
1 2
xi , (d ,1)
1 2
and applying the discrete maximum principle across the entire domain N , , we get the
1 2
required result.
Theorem 3.5.
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
207
Let y ( x) = ( y1 ( x), y2 ( x))T be the solution of (1) - (2) and let Y ( xi ) = (Y1 ( xi ), Y2 ( xi ))T be the
corresponding numerical solution of (7) - (8). Then, we have
|| Y1 y1 ||
N ,
1 2
C N 1 (ln N )2
and || Y2 y2 ||
N ,
1 2
C N 1 (ln N )2 .
Proof:
Proof follows immediately, if one applies the above Lemmas 3.3 and 3.4 to
Y y = V v W w.
4. Nonlinear Problems
Consider the nonlinear BVP
d2
2
0
dx
y ( x) = F ( x, y , y ' ),
d2
2
0
dx
p
q
y (0) = , y (1) = ,
r
s
x ,
(21)
(22)
where F ( x, y , y ' ) is a function such that
1* > F1 y ( x, y , y ' ) > 1 > 0,
x < d , 2* < F1 ( x, y , y ' ) < 2 < 0,
1* > F2 y ( x, y , y ' ) > 1 > 0,
x < d , 2* < F2
1
2
y1
y 2
( x, y , y ' ) < 2 < 0,
d < x,
d < x,
{F1 ( x, y , y ' ) F1 ( x, y , y ' )} 0, {F2 ( x, y , y ' ) F2 ( x, y , y ' )} 0,
y1
y2
y1
F1 ( x, y , y ' ) 0, F2 ( x, y , y ' ) 0,
y2
y1
y2
x .
Assume that the BVP (21) - (22) has a unique solution. In order to obtain a numerical solution of
(21) - (22), the Newton’s method of quasilineraisation is applied. Consequently, with a proper
choice of initial approximation y [0] ( y [0] = y (0) ( y (1) y (0)) x may be a proper initial guess),
we get a sequence of { y [ m ] }0 of successive approximations. In fact, we define y [ m 1] for each
fixed non-negative integer m to be the solution of the linear problem:
d2
m d
2
0
0
a1
dx
dx
y [ m 1]
y [ m 1] B m y [ m 1] = f m ,
Lm y [ m 1]
(23)
d
d2
m
a2
2
0
0
dx
dx
208
T. Valanarasu et al.
p
y [ m 1] (0) = ,
r
q
y [ m 1] (1) = ,
s
(24)
where
a1m ( x ) = F1 ( x, y [ m ] , y '[ m ] ), a2m ( x ) = F2
y1
y 2
( x, y [ m ] , y '[ m ] ),
F1 ( x, y [ m ] , y '[ m ] ) F1 ( x, y [ m ] , y '[ m ] )
m
m
b
x
b
x
(
)
(
)
y
y2
12
= 1
B m ( x) = 11m
[ m]
[ m]
[ m]
[ m ] ,
m
b21 ( x) b22 ( x) F2 y1 ( x, y , y ' ) F2 y2 ( x, y , y ' )
and
y1[m ] F1 ( x, y [ m ] , y '[ m ] )
y
f m ( x) = F ( x, y [ m ] , y '[ m ] ) [ m ] 1
[ m]
[ m]
y2 F2 y ( x, y , y ' )
2
y1[ m ] F1 ( x, y [ m ] , y '[ m ] ) y2[ m ] F1 ( x, y [ m ] , y '[ m ] )
y
y2
[m] 1
[m]
[m]
[ m]
[ m]
[ m ] .
y1 F2 y ( x, y , y ' ) y2 F2 y ( x, y , y ' )
1
2
From the assumption on F ( x, y , y ' ) it follows that each m , we have
1* > a1m ( x) = F1y ( x, y , y') > 1 > 0,
x < d,
2* < a1m ( x) = F1 ( x, y , y') < 2 < 0,
d < x,
1* > a2m ( x) = F2 y ( x, y , y') > 1 > 0,
x < d,
2* < a2m ( x) = F2 ( x, y , y') < 2 < 0,
d < x,
1
y1
2
y 2
{b11m ( x) b12m ( x)} = {F1 ( x, y [ m ] , y '[ m ] ) F1 ( x, y [ m ] , y '[ m ] )} 0,
y1
y2
{b ( x) b ( x)} = {F2 ( x, y
m
21
m
12
m
22
b ( x) = F1 ( x, y
y2
[m]
y1
'[ m ]
,y
[m]
,y
'[ m ]
) F2 ( x, y [ m ] , y '[ m ] )} 0,
y2
) 0, b ( x) = F2 ( x, y [ m ] , y '[ m ] ) 0.
m
21
y1
The problem (23) - (24) for each fixed m , is a linear BVP and is of the form (1) - (2). Hence, it
can be solved by the our method. We can prove that if the initial approximation y (0) is
sufficiently close to y (x) , the Newton sequence { y m ( x)}m =0 converge to y (x) . Infact, in Doolan
et al. (1980) the author’s has proved a similar result for a single nonlinear equation. For the
above Newton’s quasilinearisation process the following convergence criterion can be used:
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
209
| ( y[ m 1] y [ m ] )( x j ) | , x j , m 0,
where is the prescribed tolerance bound.
5. Numerical Experiments
In this section, two examples are given to illustrate the numerical method discussed in this paper
for the BVP (1)-(2).
Example 5.1.
1,
a1 ( x) =
1,
x < 0.5,
x 0.5,
3 1
,
B(x) =
1 3
p 0
= ,
q 0
2,
f1 ( x) =
3,
1,
a2 ( x ) =
1,
x < 0.5,
x 0.5,
x < 0.5,
x 0.5,
4,
f 2 ( x) =
2,
x < 0.5,
x 0.5,
r 0
= .
s 0
Example 5.2.
1 x,
a1 ( x) =
(1 x),
x < 0.5,
x 0.5,
1 x,
a2 ( x ) =
(1 x),
3 1
2 x ,
, f1 ( x) =
B(x) =
3 x,
1 3
p 0
= ,
q 0
x < 0.5,
x 0.5,
x < 0.5,
x 0.5,
4 x,
f 2 ( x) =
2 x,
x < 0.5,
x 0.5,
r 0
= .
s 0
Let Y jN be a numerical approximation for the exact solution y j on the mesh N , and N be the
1 2
number of mesh points. The exact solutions to the test problems are not available. For a finite set
of values of 1 and 2 we compute the maximum pointwise errors for j = 1, 2,
2048
N
D
1 , 2 , j
= max | Y
N
j
~
Y j
|
N ,
1 2
,
D jN = max max DN ,
1
2
1 2, j
,
210
~
where Y
T. Valanarasu et al.
2048
is the piecewise linear interpolant of the mesh function Y j2048 onto [0,1] . The range
of singular perturbation parameter 1 = {28 , 29 , 210 , , 233 }. From these quantities the
parameter-uniform order of convergence p Nj are computed from
DN
p Nj = log 2 2jN , j = 1, 2.
D
j
The computed errors D jN ( j = 1, 2) and the computed order of convergence p Nj ( j = 1, 2) are
tabulated (Tables 1-3). The nodal errors are plotted as graphs (Figures 1-2).
Table 1. Values of D1N , p1N and D2N , p2N for the solution components Y1 and Y2 respectively for
7
the Example 5.1 with 2 = 2
Number of mesh points N
32
64
128
256
512
N
4.0340e-2
2.3020e-2
1.2591e-2
6.5353e-3
3.0404e-3
D1
8.0932e-1
8.7049e-1
9.4607e-1
1.1040
p1N
D2N
7.4571e-2
4.5565e-2
2.6495e-2
1.4335e-2
p2N
7.1069e-1
7.8221e-1
8.8618e-1
1.0618
6.8671e-3
-
Table 2. Values of D1N , p1N and D2N , p2N for the solution components Y1 and Y2 respectively for
the Example 5.1 with 2 = 2 1
Number of mesh points N
32
64
128
256
512
N
4.4617e-2
2.5294e-2
1.3969e-2
7.2117e-3
3.3525e-3
D1
p1N
N
2
N
2
D
p
8.1880e-1
8.5657e-1
9.5382e-1
1.1051
6.4090e-2
3.6512e-2
1.9915e-2
1.0213e-2
8.1173e-1
8.7452e-1
9.6345e-1
1.1113
4.7275e-3
-
Table 3. Values of D1N , p1N and D2N , p2N for the solution components Y1 and Y2 respectively for
7
the Example 5.2 with 2 = 2
Number of mesh points N
32
64
128
256
512
N
2.4117e-2
1.5288e-2
8.7279e-3
4.5904e-3
2.1649e-3
D1
p1N
6.5765e-1
8.0869e-1
9.2701e-1
1.0843
D2N
8.0944e-2
5.6433e-2
3.3275e-2
1.9077e-2
N
2
5.2039e-1
7.6210e-1
8.0260e-1
1.0167
p
9.4286e-3
-
Table 4. Values of D1N , p1N and D2N , p2N for the solution components Y1 and Y2 respectively for
the Example 5.2 with 2 = 2 1
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
211
D
Number of mesh points N
32
64
2.6653e-2
1.6374e-2
128
9.1051e-3
256
4.8012e-3
p
7.0289e-1
8.4666e-1
9.2328e-1
1.0912
D
p
7.5325e-2
4.3871e-2
2.4740e-2
1.3022e-2
7.7986e-1
8.2642e-1
9.2601e-1
1.0827
N
1
N
1
N
2
N
2
512
2.2536e-3
6.1480e-3
-
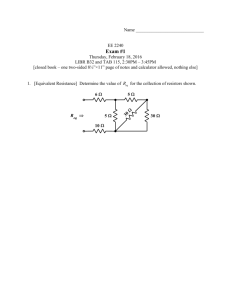
Figure 1. Nodal error for the component Y1 and Y2 of the Example 5.1
Figure 2. Nodal error for the component Y1 and Y2 of the Example 5.2
6. Conclusion
A finite difference method is derived for a system of singularly perturbed convection-diffusion
equations with discontinuous convection coefficients and source terms. The distinct singular
perturbation parameters and the discontinuity in the interior domain lead to the overlap and
interact interior layer in the solution. The numerical method uses a piecewise uniform mesh,
which is fitted to the interior layer and the upwind finite difference operator on this mesh.
Tables and figures show that the numerical results agree with the theoretical claims. The graphs
212
T. Valanarasu et al.
plotted in the figures 1-2 are convergent curves in the maximum norm at nodal points for the
different values of 1 and 2 = 2 7 for Examples 5.1-5.2. These graphs clearly indicate that the
optimal error bound is of order O( N 1 (ln N ) 2 ) as predicted by Theorem 3.5.
Acknowledgment
The second author wishes to acknowledge the National Board for Higher Mathematics, Mumbai
( India) for its financial support.
REFERENCES
Cen, Z. (2005). Parameter-uniform finite difference scheme for a system of coupled singularly
perturbed convection-diffusion equations, International Journal of Computer Mathematics,
Vol. 82, N0.2.
de Falco, C. and O’ Riordan, E. (2010a). Interior Layers in a Reaction-Diffusion with a
Discontinuous diffusion coefficient, International Journal of Numerical Analysis and
Modeling, Vol. 7, No.3.
de Falco, C. and O’ Riordan, E. (2010b). A Parameter Robust Petrov-Galerkin Scheme for
Advection-Diffusion-Reaction Equations, Numerical Algorithms, Vol.56, No.1.
Doolan, E.P., Miller, J.J.H. and Schilders, W.H.A. (1980). Uniform Numerical Methods for
Problems with Initial and Boundary Layers, Boole Press, Dublin.
Farrel, P.A., Hegarty, A.F., Miller, J.J.H., O’Riordan, E. and Shishkin, G.I. (2004a). Global
maximum-norm parameter-uniform numerical method for a singularly perturbed
convection-diffusion problem with discontinuous convection coefficient, Mathematical and
Computer Modelling, Vol. 40, No.11-12.
Farrel, P.A., Hegarty, A.F., Miller, J.J.H., O’Riordan, E. and Shishkin, G.I. (2004b). Singularly
perturbed convection-diffusion problem with boundary and weak interior layers, Journal of
Computational Applied Mathematics, Vol. 166, No.1.
Farrel, P.A., Miller, J.J.H., O’Riordan, E. and Shishkin, G.I. (2000b). Singularly perturbed
differential equations with discontinuous source terms, In Analytical and Numerical
Methods for Convection-Dominated and Singularly Perturbed Problems (Miller, J.J.H.,
Shishkin, G.I. and Vulkov, L., editors), pp. 23–32, Nova Science Publishers.
Farrell, P.A., Hegarty, A.F., Miller, J.J.H., O’Riordan, E. and G.I. Shishkin. (2000a). Robust
computational techniques for boundary layers, Chapman and Hall/CRC Press, Boca Raton,
U.S.A.
Lin ß , T and Niall, Madden. (2003). An improved error estimate for a numerical method for a
system of coupled singularly perturbed reaction-diffusion equations, Computational
Methods in Applied Mathematics, Vol.3, No.3.
AAM: Intern. J., Vol. 8, Issue 1 (June 2013)
213
Lin ß , T. (2007). Analysis of an upwind finite-difference scheme for a system of coupled
singularly perturbed convection-diffusion equations, Computing, Vol.79, No. 1.
Lin ß , T. (2009). Analysis of a system of singularly perturbed convection-diffusion equations
with strong coupling, SIAM Journal on Numerical Analysis, Vol. 47, No. 3.
Lin ß , T. and Niall, Madden. (2004). Accurate solution of a system of coupled singularly
perturbed reaction-diffusion equations, Computing, 73, No.2.
Matthews, S. (2000). Parameter Robust Numerical Methods for a System of Two Coupled
Singularly Perturbed Reaction-Diffusion Equations, Master’s Thesis, School of
Mathematical Sciences, Dublin City University, Ireland.
Matthews, S., Miller, J.J.H., O’Riordan, E. and Shishkin, G.I. (2000a). A Parameter Robust
Numerical Method for a System of singularly perturbed ordinary differential equations, In
Analytical and Numerical methods for Convection-Dominated and Singularly Perturbed
Problems (Miller, J.J.H., Shishkin, G.I. and Vulkov, L., editors), pp. 219-224, Nova Science
Publishers.
Matthews, S., O’Riordan, E. and Shishkin, G.I. (2000b). Numerical methods for a system of
singularly perturbed reaction-diffusion equations, Preprint MS-00-05, School of
Mathematical Sciences, Dublin City University, Ireland.
Miller, J.J.H., O’Riordan, E. and Shishkin, G.I. (1996). Fitted numerical methods for singular
perturbation problems: error estimates in the maximum norm for linear problems in one and
two dimensions, World Scientific Publishing Co. Pte. Ltd, Singapore.
Mythili Priyadharshini, R. and Ramanujam, N. (2009). Approximation of derivative to a
singularly perturbed second-order ordinary differential equation with discontinuous
convection coefficient using hybrid difference scheme, International Journal of Computer
Mathematics, Vol. 86, No. 8.
Niall, Madden and Stynes, M. (2003). A Uniformly Convergent Numerical Method for a
Coupled System of Two Singularly Perturbed Linear Reaction-Diffusion Problems, IMA
Journal of Numerical Analysis, Vol. 23, No.4.
Roos, H.G., Stynes, M. and Tobiska, L. (1996). Numerical methods for singularly perturbed
differential equations, Springer-Verlag, Berlin Heidelberg.
Tamilselvan, A. and Ramanujam, N. (2010). A parameter-uniform numerical method for
system of singularly perturbed convection diffusion equations with discontinuous
convection coefficients, International Journal of Computer Mathematics, Vol. 87, No.6.
Tamilselvan, A., Ramanujam, N. and Shanthi, V. (2007). A Numerical Method for Singularly
Perturbed Weakly Coupled System of Two Second Order Ordinary Differential Equations
with Discontinuous Source Term, Journal of Computational and Applied Mathematics,
Vol. 202, No.2.
Valanarasu, T. and Ramanujam, N. (2004). Asymptotic initial value method for a system of
singularly perturbed second order ordinary differental equations of convection-diffusion
type, International Journal of Computer Mathematics, Vol. 81, No. 11.