INTERNATIONAL COUNCIL FOR THE EXPLORATION OF THE SEA
advertisement

This paper not to be cited witllOut prior reference to the authors
INTERNATIONAL COUNCIL FOR
THE EXPLORATION OF THE SEA
C.M. 1991/B:2l
Fish Capture Committee
MODEL RESEARCH ON A SINGLE-DOOR TRAWL AT LAKE INSKO
IN 1990
.
by
. H. deJong & B. van Marlen
Netherlands Institute for Fisheries Research
P.O. Box 68. 1970 AB Umuiden
The Netherlands
This paper not to be cited without prior reference to the author
INTERNATIONAL COUNCIL FOR
THE EXPLORATION OF THE SEA
lCES C.M. 1991/B:21
Fish Capture Commiuee
•
Model research on a single-door trawl at Lake Insko in 1990
by
H. de Jong & B. van Marlen
Netherlands Institute foe Fisherles Research
P.O. Box 68, 1970 AB Umuiden
The Neth<'Llands
•
Abstract
Experiments on a 1 to 7 scale trawl model of a net of type "FANNY ll", rigged with one
door at the port side and a Dan-Ieno at the starboard side are described in this paper. The
aim of this rigging is to catch fish in elose proximity of the sea surface outside the wake
of the trawler thus making use of avoidance reactions of fish to emitted sound in the path
of the vessel. The trials were conducted at station Insko, Poland in cooperation with the
University of Agriculture, Szczecin and tlie University and "Institut für Hochseefischerei
und Fischverarbeitung - (IfH)" of Rostock, Gennany in June 1990. The geometry and
resistance of the trawl model were measured and recorded with variable components of
the rigging and the results are explained. A variant with two doors spreading in the same
direction has also been tried with success. It is recommended to prove the concept of this
rigging prior to further technical optimization. The rigging may become appropriate for a
sampling gear for pelagic fish elose to the surface.
•
... ,-'
-ii-
Table 01
1.
2.
3.
4.
5
6.
7.
8.
contents
Introd.uction.••..•.•••••••••••.•••••..••••••...•••••.•••..•.•••••.•.••••••••..•. 4
F~shi!1g ge~ p~nciple
4
Rlgglng obJectlve..............•............................................... 4
Description of model experiments.........•................................. 5
4.1 General
5
4.2 Data.-acquisition
~ ....•......••••...•••......•• _..6
4.3 Gear an.d rigging.•••••.••..•..•••••••••••••••••••.•...•.••.••••••.•..••.6
4.4 Design of experiments.••••.••.•••••••••••.•••••••••••••••••••.••••••.•7
4.5 Data analysis
7
Discussion of results..•.•••••••..•..••••••..•••.•••••.•••.••••..••••..•..••..• 8
8
5.1 Distance between Dan-leno and centre-line of vessel..
5.2 Watp loads........•..................•..........•.......................8
5.3 Divergence angles.•••••••.•••••••••••••••...••••••.•.•..••..•.••.•.••..9
5.4 Declination angles.•...•.•...••.•••••.......•.....••.•....••••..........9
5.5 "erticalneto~rUU1g ...••••...••.••.•..•...••.•.•..••..•.•.••...•.•.•....9
5.6 Distance between Dan-leno and door
l0
5.7 Door angles .•.•.••.•.••••..••••..•••..••..••.•••. ~ .••••....•...•.••.•.• 10
Conclusions and recommendations.••.•.•••••••••••..•.••••••••••••..••••• 10
Ackn.owledgements..•..••..••••••.........•.••..•.••....•.•...•...•.......••. 10
11
List of References
•
- III -
----------------
--
j,
I
,"".
..~
.,
"'>,
I
I
)
INTRODUCTION.
1.
Research on a single-dOOf ngging for pelagic trawls has been descnbed in [6] with' a
review of activities imtil September 1989. The cUrrent research prOgi-amIne has been
extended in June 1990 With model tests at the station Irisko of the "Instytut AkWakulhify
i TechnikiRybacki" (!ATR), afaculty of theUniversity of Agricwture, Szczecin in
Poland urider the initiative of the "Universität RostOck, Sektion Schiffstechnik" in cOoperation with the "Institut für Hochseefischerei und Fischve:raroeitung, Rost6ck" (HR).
Tbe following perSons were involved in the experimeI!ts:
. "
,
.
Dr~ -Ing. Mathias Pasche~, University ofRostock (research leader)
Im, Rostock
1 .
Dipl. Ing. Booo Schäfer,
Dr. -Ing. Henryk Sendlak, University of AgncUltUre, Szciecin '
RIVO, Umuiden I
I:r. Bob yan Marlen,
Harry de Jong ,
RIVO, Umuiden !
.
j
The.objective of, these experiments' was (0, rind the rigging ,with a
maximum horizontal netopening at the largest sideways displacement of
the genr.
'.,'
•...•
'"
',"
,
.'
.,.'
•
~
•
.'"
.
,
0".,
."..
_"'\"
'~'
..
.,
l
~!
,
Some background information IS relevantfor this study. Recent ltterature revealed results
ofobservations of the reaction of schools of hemng to
approaching research vessel.
The f"mdings given in [1, 2, 5] indicate. potential for increasing catchability wheri
avoiding the wake of the vessel. The presentation of this alternative rigging.invoked
interest withiil the International Council for the Exploration of the Sea (leES) to apply
this mcthOd to sainpling gear for ideniliication of fish dose to the sulface. Meanwhile
the idea generatedinterest iri the Dritch fishirig industry, which resulted in contract
research carriedoüi by RIVO and the Dritch company Umuiden Stores B.V. Model tests
were done in theflume tank ofHinshals inApril1990 on models scale 1.1025 and 1 to
.35 of conimoDly used Dutch tniwls. These trials are. not described in this paper. They
indicated lhat without difficUIties a smgle-door rigging could also be usoo for these nets.
This f"mding was coiümned later on during the year,ori FRV ''Tridcns n", during fuH .
scale tCstS in May 1990. Tbe research activities are summärisoo in Table 1 below.
an
1
. . , "
_~.
. 2.
•
,.""'.'
>
FISHING GEAR
"
,~
l·
•
"
'
...• '
PRINCIPLE~
I
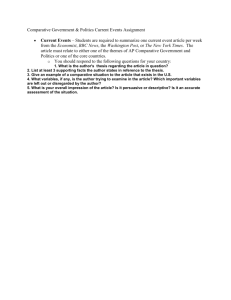
Tho prlncipie ofthis rig is depicted in Figure 1~ The d~r is rlggoo at the pOrt sideand the
Dan-Ieno at thestarboard side. The warp running to the door efosses the path of the
mouth operiing of the trawl, which may be overcome by using an extension piece at the
door and additional weight to press the warp end down. This. variant has been tried but
not succesfuHy until now. Very large floats attachoo to the wing ends avoid them to sink.
•
_,
3~
,
._ r
RIGGING
.~
""-,
OBJECTIVE~
Thc main objective is to catcii fish dose (0 tI~e surface that is tieiieved to
escape thröugh avoidancc of the wake of the ,·vessel.
I
The escäpe mechanism due to errrltted sound in the wake of a trawler has bCen descrlbed
bY,Ona and Misimd; ,who stüdied th,e beh~lViOlir of schools herring to an approaching
vessel [1,2]. Thefish seem to stay clearof tbe wake bebmd tbe vessel and migrate
sideways. Side-scan sonar observations showed that a surface layer of herring diverted
sideways ~md cleaied the päth of an approaching trawl.This phenomeilOrl explains thc
. differences found during echo-surveys between the received echos and sampies of fish
caught with trawl. Dutch trawler skippers report using iig-zagging course wheri
steering towardS a school of hemng, resulting in better eatch rates.
.
,
of
a
a
f
!
-4-
.
•
'
.
Table 1~ Review ofresearch activitles lintill990.
1
,
Year~
No
,.
l\fethod . .
Location
1987 AufuIst
.
",....."'"
Stib.iect
..
Mechamcal feasibility stUdy
Lake Insko ,... Mod61snidy
,
"
.
.
_.
.'
. '.;
"
..
.',",
-':,,",',~
. ,--,
._,
.....- . . .
.
..
,
.,
,.,~
..
.,-
,.
"
,"" "
... --
.~.
Full-scale
'-' .
.,. ' .... "
'.',-
AtIaIltlC
1989 September
4
-.....
Westof
Irel3Ild _.'
1989 MärCh .
3
Full-seale
Baltic Sea
1988 AugUst
2
.'- ...
... ... " ........ "
~
-
Gear hanclling stUdy on
. " ."
FRV,~'Emst Haeckel"
MeasurementS of drag änd
geometiY ön FRV "Ernst
Haeckee. .... , : _ .
Full-seale
Occim
~
Technical feasibiliiy study .
on FRV ."Ernst Haeckel" ... '
';"!\'
..
(
l_
I
..
I
6
,
I.
~,
...... _ , .'
-
.,'.
.......,
..
-'.'"
,
-
,.
.'--
,
7
_.
,-
~"""-
..
,,".
-',.--,
.--
.._'".
..
"
_~
meshes trawl on FRV
"Tridens ll" ... '
.
."
'
~odel~tudy
Lake Insko
1990Jurie
..
. ,.
-.~
.
"
.......
,
Net geOinetry and mag at
seale 1 : 25 and 1 : 35,
feasibiliti study ofDuteh
midwater trawls ,." ......'....
..
,
.. Fishing trials With a 5600
Full-scale
NorthSea
1990May
'-,.'
Modelstudy
Flumetaßk
HirtshaIs
1990 April
5
..
,
.
-
...
,~.
MeasurementS of drag arid
geomeny at scale 1 : 7 with
seveial different riggin~s .
..
't.
4~
. 4.1
""' . .
~~:.
"
.....
•
• "..
'..
DESCRIPTION OF. MODEL
. Gerieral~"
','
•
EXPERIMENTS~
., ,
'.,
.
.
, ..
., ,
,.
Research Station Lake Insko isa post of the "InstytutAkwakultury i Techniki Rybacki"
(JATR) of the UniversitYof Agnculrnre, Szczecin usoo for model experimentS on trawls
andooucational purposes. The lakeis approxiniately3.5 lall longarid hasa depth of
some ISm. The clrCumstances cän be ideal for trawl model experiementS. There is littIe
current andthe wind conditions are inostly. riilld. Tows can de done on straight line .
tra~kS, butno~. over .the total, length .of the lake without changirig course. A spe~ially
deslgned catamaran IS used for the trIals. Nets can be observed mounted to two vertical
poles at the bOw,of the vesse! or rigged withwaIps,doors arid bndles arid towed behind
the bOat Kwidzinski descrlbes th,ese facilities in great detail in [3]. Forreference sake the
principle diIriensions of the catamaran are given in Table 2.
. .
..
.
r
Tabl e 2. Priri ClpJe
~
diiil'
'. .. 0 fr'nsk'ocatamaran
enSlOns
ltem
length over all
beam .
distance between the hulls
draught
. . '
displaCeInent voltime
~~~Speed
engrne power '. .
thrust at v=3nl1s
number of propellers
number of rudderS ...
number of winches . .
Value
11.70
8.80
7.15
0.70
8.50
4.50
2*77 '
.
.
6000
2
..
2
3
..
-5-
..
""-
,
~ "
Umt
m
m
m
m
in3
iri/s
k\V
N,,-
-
-
-
..'
Instructiori aböut tb6 handlmg of trawls is regularly, given io, stüdents of the UniverSity of
Szczecin. The procoourcS in commefclal riawling can:be simulated a~curately. .
:,
"
4.2
,'. ,,'
,,' ,
. Data.:.acqulsltion.
"'
.
l
.!
i
,,",
,.'
,
Th6 veroc3.I, horlZontill netopening arid doorSpread were nieasUred With small echosoimders tied on these parts of th6 trawl. The doorattitude angles were measured with
equipment developed at the University of Rostoc,k. The angle of attack could· be ,
measurOO up to 400 arid the äugle of beet between -300 and +3()o. The angle meters änd ä
netsonde were linked to a "Spectrimi ZX" personal'computer to recoro the data. This
computer
placoo iri the right cabin of the catarilaran,
to store and process däta.
The left cabin is used to control the engines and wmches. Table 3 gives an overview of
was
usoo
recorded datJi
.
I
, Table 3: Data rneaStIred '
hannel
VarIable, ..
.'
1
Port warp load
2
Stärboärd wärp load
3
Port divergerice angle·
4
StarbOard divergence angle
\.
VemcaI netOpening :
5
6
Horizontal netopening
7
Port declinationangle
8
Starboard decllilation angle
9
Towrng speed. ., . ,
Door angle of attick ".
10'
D<>Or trim angle .
.11
I,
Doorhedan le ..:, ..
.",--.12 ... "' ..
Watertem rature
13
.
. . .
.. .
. .'
.
Data was copioo to an'mM-coiiipatible pe at the end ofeach day;md printed. The
toWing speed was recorded with an Ott-impeller log hangoo between th6 oows of the '
eatamaran in front of th6 net. This log is cIainiCd to have an accuracy of ± 0.02 inls. The .
exact weight attached to the wingends was measured before each haul arid when .
neeessary correctoo for differenCe~ in water tempera~ and density.
'
,<
.
artet rigging~'
. ,
.,,: .. '.... , ;~":". ,',
. "',;'
A model at scale ratio 1 to 70f net P~87/90·169 ("FANNY n") has been usoo for
alltrials. Boats were attached to the wirigends to keep thetrawl at the surfaee. In the
4.3 ',Gear
mOdel they had a buoyaricyof 235.5N. In addition floats wem attachoo tothe headline in
bundles of three, with a buoyaricy of 3.3N each. Tbe ,warp length was kept constant at
50m and
extensiori of 105m was applied to the pört
to ensure the wirigerids 10 be
. at the same distaitcefroiri the :vesseI. In order to appraise the influence of this extension
in same experiments 205mwas used. Three different types of doofs have been tiied. A
bi-plane door, a profile door(fype Süberkrüb) and a Polish desigrioo high lift dOOf with
end-plates, a leading Cdge flap and higher aspect ratio. tIbis door is described in [4J. The
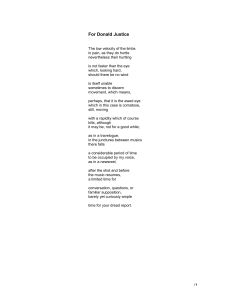
various doors" are sketched in Figure 2 and their dimensions, weights and codes of
designation are given in Ta~le 4.
~
.
·
warp
an
a e
.
,
"hts 0 fd oors.
lrnenSlOns and'welg
DimenSIOn
Type
....
Bi-plane,
Polish High Lift
Polish High Lift
Süberlaüb ..·.
Area
.~.
. Unit:
Code
(m2)
BP .
2xO.1163
0.1700
.0.0630
0.1152
PUL
PIIL.
S ..
''''
! -
,
* = measured under waterWl"thI
ang e meters attached).
lIeight
(ern)
: \Vldth
l, (cm)
,
.,.
46.5
68
52.5
48
-6-
,
,
,.
~..
L
i
j
,'
...
"
25
25
12.
24
.. (m2)
(kg)
.,
..
.'"
'.
Aren FS
Weight
'.',
.'
6.4*
... 18 ...
..
.
"
.~."
.
J,.'_~
2x5.64 I
8.33
3.09 ,
5.69 .:
•
ih:fOÜO~~~i~~jte~XJi~~t~:~~~· we~
varied throughout the experimentS:
• Type of d o o f .
•
.•
•
•
•
•
. Attachment of oackstrOps andwarp to the door
Extra weight attachCd to the Dan-Ieno
Dan-Ieno weight. , .',.,
'. ,
' '.
Second door spreading to port, replacing Dan~leno
Bridle wdghts attached 10 the lower Wingends .
Extension of port warp
.'
Tbe towing sPeed was varied between LOril/s ami i.sn1iswiih sieps of approximatelY
O.hrils. Froude's Law was used to detennine the towing speoo for the mOdel. .
Par most cases önly one door has t>een used on the port sidC of the gear. Iri hauls 22 io
25 two doors wem riggoo to the nel, both Spreading in the same w.rection arid öf different
size.The one on the port side bCing the largest. The net was towoo'With theheadline
centre ändthe Wing-ends at the sUrface. Buayancy.arid weight forces for the model wem
calculated With the eure of the lerigth scaIe ratio (l : 7).
4.s.,Data analysis.
: . ',
,.. ".,~' . . " . ;
.
32 instrumentated hauls were done Wlth an average durauon of 25 nunutes. A part of
these trials were unsuitable for further comparison arid analysis..Tbc reason is urireliable
. recording of data due to nialfunctioning of instI1JmentS .or datä transmission through
cables, whichutifortumltely oecUred 1Osome extent. Tbc anälysis washempefed also by
.' the lack .of infomiation about the. true ,course and drift angle of the catarn.aräri, that
obviouslyalteted course during measurements to aIign with the ccntre of the lake. 22
hauls were grouped into foUr comparative .sets of trials, for which the variables. of the
riggirig were equal. Set 5 did not get a cöunterPaIt due to lack of comparable data. For
this case the Dan-LeilO had been replaced with a small trawl door rigged at starooai-d to
generate spreading force iri the same direction aS. the large door at the portside of the
trawLThe measirrementS of the horizOntal riet0Pening were notfurther anaIysed due to .
arid gfoUps
given in Table .
cable transriüssion problems. The various comparative
5 arid ~able 7 With-respective haul numbers. .... . ' ..
.
sets
~..
.
~
..
.
are
a e : eVlewo companUve ex >enments", . ",. . . , , .,........, .., ...
Comparahve
Group b Door type
Group a
.
...
.,....... ,. ..'"
.... , ' . , ......... ,......" .......
set ..
4,5, 8,9
1..
2,6, 7..
Bi-plane ..... '.' .. 10, 13
11, 12 .... . . . . Bi-plane '. ' ...
2
14, 17,21 . - 18, 19
3.
Polish high lift
4
28 ,.
29,30
Süberkrüb ...
.. ....... 5
23,24,25.-,. *
Bi-plane, . .
.'..
,.
~ ~.,
,
.
"
....
, ...•. ~ """">
\C"
""""
"""''',,,,.,,~
,c ... -.-·.~ ...'.J,t
Door area
in2 .(FS) ,..
2x 5.7
2x 5.7 .
8.33 (3.1)
5.6
2x5.2
...
r
..
in ~ariy cäses more. than 'one daia-päint was fo'und at a ceitairi towing spCed leading to ä
large amount of scatter iri the drita~ A possible explanation for some of this scatteris thc
fact that the vesselalterCd course during measurements. In other cases equalvaIues were
found at different speeds, which could indicate that new readings wem not tninsmitted to
..the dataIogger and old ones repeated.
.
.
to
Figures 3 35 depici the results of ihe ineasurementS ror tile "mOllS ccimparative sets of
hauls. Tbc foIIoWing parameters have bCCn plotted against towirig speed:
, .
-7-
• Distance betWeen eentre ime of vessel and Dan-leno
• \Vrirp loads
.
I
~ Divergence angles .
• Declination angles
' .
• Veitical nctopenirig . ." .
• Distance between Dan-Ieno and door
~ . Door attack, trini and heet angles
~
,
k·""".
~,
•
•
.
1 '..
,
...
•..
~
'$'
,'_
..'
1
.~
,;..::
Where appropriate, the upper regressIon fonnula gIven 10 the graphs represent the port
side parameter and the low~r ori6 the stifbOar<;l one. :. .' ... ' ..' , .. ' " ; ',::
Concerning the plots of door attitude angles It should be notOO that posluve heel means
heeIing inwiud, positive trim means falling backWards and of courSe Positive attack
means that the flow is diieCted 10 the iniier surface of the door.
.
I
I
I
I
5
, 5.1 .' Oistance
I
RESULTS~
OISCUSSION OF
between rian:.ieno and ~entre·iine of vessel.
.
111e scaner in the results i8 targe, presumably due to changes in cmirseof the boat during
ineasureinents~ It is hard to. draw cönc1usions about the best riggmg for the largest
sidewaysdisplacementofthe gear. Set 5 proouces the largest vaIues indicatingthe Biplanedoor.to be the best spreader. It is recommended to measure the drift angle of the
catamaian in futUre eXperiments to avoid these proble~.
,.
~.'
,
.~
"
5.2 . ;Warp loads. '.:
" .. ',
" \.
,
. '"
. '. ..;'
Contrciry toearlier fmdings
ful1~scale on FRV "Ernst Haeckel" the starboard side
shows higher warp loads in ineist ca,ses. It was expected that the wäip with th6 door
would have the highest load~ but this appearS not to b6 the care. Calculating the vanous
weight componentsattached to th6 gear shows largediscrepancies betWeen the full-scaIe
and. equivalerit niOdel values, .that coUld be the explanation.
. ". . .
;
at
.,
Table 6: Weights in IOOdel and full-scaIe ~uivalentS
"'RV UErnst
,.",
Experiment" Haeckel" '.
.'
Full-scale real
Full-scale equiGear
....... valent value '"
comporieni " .. value
(kg) ..
(kg) "
..
Unit
Door .
BP:
2195
?
PHL: 6174
1
•..
""
1"".. ...... S :"'~, 2709" ..
Dan-leno
650
2126, 1098
5831~5145
450
. 2435
..
..
'
"
."
""
...... 425
5042, 216L .,
Bridle weight
I
.</~
,e
,'
"
,,"
".
,
K.><
""
."
....
,
.
,
'
.. '~
.
:
.....;..vJ • .
'·c'·"
.. .. -,.: .:., .
.'.!.,_~_'" .'._ ... '_' ," -'-"'_'
..
.'
"
Lake 'Insko
I
...
•
Model real
V31ue '... ..
; .~,
"'
.
(ki) .'.
....
....
BP:
6.4
PHL: 18
S:
, 6.2, 7.9
3.2
,,I
17, 15
..... ,...7.1 .....
I. 14.7, 6.3 .
......
...
,
ModeleqwvaIerit value
. . (kg)
,.
-
I
•
,"
,
-
"
1.89.
1.23
-"-
.
.•
.
'.
1.24
''''-,
...
-
. I
,
. ComparaUve set
i:.
". ' .
';'"
..
are
in
. ,..
-
Door attachmerit points ofwarps arid bridles have been vaned forthe groups a änd b of
this set (see Table 7). The cOdes for these points
explained FigUre 2. The data
points ef haul 3 were substantially lower than fOI- the other ones in the same group. No
explanationcould be found and therefore these data points were omitted from Figure 8. 1t
is cIear that the attachmerit of warpS and bridles has a significant effect on the warp loadS.
Comparative set 2 : ,
. ,
.'
".
,
Fer this. set. s.ligh~y Ionger brid!es were mied, 2.5~ instead of ~~5rn' Group aarid group
b also dlffer m respect of the bndle attachment pomts. ,In facta true analysis of the effect
,
- 8-
of the bridle eiorigation 1s therefore not Possible aS bOtbeffects are measured at the same
time. The warp loadS do not seem to be affected to great extent (Figrire 9). .
.
a
Comparative set
3:
. ComparaÜve: set
4:
.. ".. .... .' .'
. '.' "
...
For this set the warpattachment to the PHL-door. has been varied. Group a shows a
higherload on the port warp than group b. (Figure 10),..
..
'.' .
,<.
.<
, ' .
••••
•
• ••
'
"
•
'..
, •
,
This set showsthe effect of changing thewarp attaclunent pomt on the S-door onthe
loads. Iri group b th6
is rigged at a higher angle of attaekt but the spread arid
load are not higher, contrary to the expectätiön (Figure 11). .
'.
warP
warp
ComparaÜve' set 5: ,. .,. '.
Replacmg the Dan.:.leno by a
iun almost parallel (Figrire 12).
'.'
,
.
'
..
.
. '. ,'.
,..'
sniall door leads to more load on tlte S-warp. Both curves
'5~3 " Divergence angles.
J
.
'..
.
.
Comparative set 1:.
'.
.
,
.
,
.
The divergence angles do not varY much With towing speed for hOththe port and ihe
starboard side. Group a shows increasing angle especially at the doOr side, iödicating
. the doorstiIl to be effective at higher speeds. For grouj) b many datä-points are found at
165 degfees~ It looks as though the angle meter had reachoo
its outer lirilit (Figme 13)•.
.
.
. ..
an
.
.
,
~
Comparative set
2::
'"
<
.
'
•
.:
' . '
.'
•
.
'
,
•
,
Changing the backStrop attaehnierit on the door frOm Point 2 to Point 1 unproves the sieteways displacemeIlt of the geai by approxirilately 'l°.Tbe, distarice betWeen Dan-Ieno and
door is not sigrieficantly changed however. Some S-divergence arigles.reach negative'
values, the Dan-Ieno does not pass the centielirie of th6 vessel in those caSes (Figure 14)~ .
.
ComparaÜve set
3:
.
.:
<,
.
" ,
.'
.
•
-
"
..
•
The effect of attächirig the waI-p, in point 2 instead of point 1 to the PIllrdoor on tlte
'. divergerice angles iS negligible (figure 15).
.
Compärative set 4: ." ' .
,... .
.', .
Changing the warp point from 1 to 2 on the S-door results in slightly increased
divergence angles, inöther words the door pulis. the gear more side-ways. As Point 2
means a higher angle of attack this result is corisistent (Figure 16).
Comparaiive set 5: ' .
'
'
<,.,.
, •. '
a
. '
, The use of two door spreadirig in th6 same di.rection has great effect on the position of
the gear (Figure 17). Both divergence angles are sigriificantly increased arid rise stranger
with speed. This result confilms the fesult of Figure 7 shöwing a larger side-ways
displacement of th6 gear.
.
5.4
Declination angles.., .
'
Corriparative setS 1,2,4 arid 5 do not show a large difference in d6cliriation angles. Sei 3 . shows larger angles, the gear sinks deeper as may be expected due to the larger weights
of both door and Dan-Ieno. In most cases the port side sirucs deeper which is consistent
with negative door heel angles that often occiIred. (Figui-e 18-22). " ' .
.
.
5.5,
Vertieal netoPening;·
,.
,"
. '
The nonnal tendency of headline height to decreaSe with increasing towing speed is dear
in all cases. The differences between the various sets are rather large in some cases. ,
Adding 1ni warplength seems to cause the headline height to decrease (Set 2 vs Set
. 1),
.
,
- 9-'
. especially for the hauls in groups b. 10e heavy pHi-door puiis the gear more open in
vertical direction cän be seen from companSon of Set 2 and Set 3.
. ' . ..
as
i I,
5~6
Distance beiween Dan':'leriö imd chlor..
.'
Sensible readings viere only obtairied for Sets. 1; 2 and 3., Iri all cases the disiänce
increases without reaching a maximum value, indicating that the door is riot losiitg its
spreading power (Figures 28 - 30).
,
.
.. '.
i
5~7
0001' ar:tg 1es• .'.".'.
. ,i
. . " . . ':'" .; . "
0,
Figures 31 - 35 depict the door attack, trim and heel angles plotted against the towing
speed. The ßP-door reaches aiUick arigles of 30°-400~ The PHL-door comes iö 25°-3D?,
whilst the S-door values Me around 25°. Trlm angl~ of the BP-door can be negative,
indieating the door to tip the nose forWard arid the heCl for this door is negative in many
cases. 10e PHL-door shows large negative trim arid heel (Figirre 33). 10e S-door häS a
positive trirri, buta negative heel angle (Figure 34).This somewhat peculiar door attitude
is causoo by the fact that the gear top wing endsi are on the suIface and the door
positionoo deeper, contrary to nonnal midwater oPera~ons.
a
,
I
I
."'"
6.
••
~,•.
I';.
~i
?
:'
..;1'
,.,
•.•. l.,',"
.-'\.
~..
', .. "'
.'.i".l
. CONCLUSIONS·. AND RECOMMENDATIONS.
I
10e resultS show 'that this rigging meetS the objecrlve ririoWing the gwoutside the~aice
oftheVesseI. Compaiative fishing trials are still necessary to prove whether this rigging
also hnproves catchability. 10e best rigging for maXimum sideways disphicement of the
gear seenis to be arig with 'iwo doors of unequaIlsize sprCäding . both in the same'
direction, aIthough some additionalloss in gearspread will result. The Bi-Plane door
showed to be an effective spreader for this gear.1oe Polish High' Lift door did not
produce the best results, büi the main rea50ri may be the wCighi of this model door, that
waS too 1arge· to be represeritaiive. 10e geometiy of the gear is also dependent on a
proPer extensionof the warp to which the door is attached. 1oe. optimum vaIuehas not
been foürid yet arid Will deperid on thetotallengm of warPs appIiCd. Further optimization .
of this rigging cän be done once it has been proven that the principle works from a fish
behaviour point of view.
:
!
10e f~ciiities at L3.ke Insko are verysuitable for ~ariying out of training arid research
projects on large rriodels iri open water..1oe equiprrient needs to be improved however to .
avoid imriecessary loss in valuable research time.. It is a common problem in EastEuroPean countries that electronic components and computer facilities are severely .
lacki~g. With financial input from aid-programmes in education and research ä much·
higher quantitative and qualitative training and research outPut Can be expected. A Joint
European Prcijeet proposal between Poland,1oe NetherIarids, Gerriuiny and the United
Kingdom häs been submitted in the Ee-programme ~MPUS to achieve this objective'- ~
,
7.
-'ce
1.1-,...
'"
~
'I
I
,>,
ACKNOWLEDGEMENTS.
•
.
"
'.
" .
,.
.
!
_ ~'
I·
I'
•
. ,
' .
'.
•••
_
Tbe authors are most indebted to prof dr. J~ Swiniarski for his kind invitätiori to come tö
Insko to carry out these exPerimenis. Furtheimore we like to thank Dr. Henryk Seridlak
for his data-acquisitiori arid analysis ,work~ A word of grntitude should also be addressed
to the crew of the Irisko catainaran arid the various guests at the Station for their 'effort to
rüri the vessel and handle the geacs. We also like to thimk Dr. Mathias Paschen from the
University of RostOck for his organisation arid management and Bodo Schäfer from IfHRostOck for his professional input in the project. It was a stimulatirig arid pleasarit experience.'
.
- 10-
'. 1
.~
8.
1.
LIST OF REFERENCES.
Ona, E. & Toresen, R.
.
"Avoidance reactions 0/ herring to a survey vessel, studied by scanning sonar."
lCES C.M. 19881H:46.
2.
Ona, E. & Toresen, R.
"Reactions 0/ herring to trawling noise."
lCES C.M. 1988/B:36.
3.
Kwidzinski, Z.
'J4. method 0/ studying trawl models in the experimental station 0/ the /aculty 0/
seajisheries and/ood technology."
Acta Ichthyologica et Piscatoria, Vol. XVI Facs. 2, 1986, p. 43-51.
Fischerei-Forschung Rostock 26 (1988) I, p.38-40.
4.
Kwidzinski, Z.
'j<1
new trawl doorfor pelagic trawl"
.
Proceedings World Symposium on Fishing Gear and Fishing Vessel Design,
Marine Institute, St. John's Newfoundland, Canada 1988, printed 1989,
p.297-299~
5.
Aglen, A. & Misund, O.A.
"Swimming behaviour o/jish schools in the North Sea during acoustic surveying
and pelagic sampling trawling."
lCES C.M. 19901B:38·
6.
Van Marlen, B. ; De Jong, H. ; Paschen, M. & Schäfer, B.
"Performance measurements on a single-door trawl towed at the sea suiface."
. lCES C.M. 19901B:19
- 11 -
,
'1I
I.
.
. blesof th en~~m
. .. . ~•.....
. ,,-.e : eVIeWOf expenments" W1.th'vana
."
.c.
Door
Attachment
ßrldle
Door
ßrldle variable
Set Grp Warp
DanpO,lnt
door
length length type
weight
leno
weJght IdenUI
welght
fler ..
.-\
warp Upper Lower
P
S
PIS
strop strop
(nr) . (~r) '. (nr). . (kg)
(m).
(m) .
(kg)
_.(kg).
. ...
a
.
lIaul
no.
,
'"
1
2
3
4
5
"-
6
7
8
9~
10
11
12
·13
14
15
.,
,
1
1
a
1
1
1
1
1
,,1.
2
·2
2
2
3
b
b
16
17 '3
18
3·
19
3
2.0
21
3
22
23
5
23a
24
5
248
,
25
5.
26
,.27 ..
28
4
29
4
30
4
.',,_.
···r··.·
a
a
b
.b
a
b
b
"
a.
a
50
50
50
50
50
50
50
50
..
50 ..
50.
50
50
50.
50
50
.
50
a
50
b
50
b
50
50
a ... 50.
50
a
50
60
50
a
60
a.
50.
50
50 .
....
a
50
b
50
..
b
50
.
1.5
BP
1
1
1.5
BP
1
1
1.5
BP
1
2
"
1.5
BP'
1
2
1.5
BP
.1
2
,1.5
.. 1
BP
1
1.
1.5
BP
1
1.5
BP
1
2
..1.5. "'-, BPc I.' ..• 1 "" .. ,2.
BP
2.5
1
2
:2.5'
1
BP·
1
2.5
BP
1
1
BP .. 1 .' .... 2
.·.··2.5 ...
1.5
PH.
1
1
.1'
1.5' . PH..
1
[.18]
,1.5
PH..
1
1
1
1
1.5 : PH..
PH...
1.5
2.
1
1.5
PH..
2
1
1.5
PH..
1
1
1.5
PH.. .. 1 . .
.1
1.5
PH..
1
1
1.5
BP
1
3
1.5
BP
1
3
1.5
BP
1
3
1.5
BP
1
3
1.5. .BP . .. 1
3
1.5
BP
1
1
.1.5 .. . BP ... L
1....
1.5
S
1
1
1.5
S
2
1
1.5
S
2
1
".e<•
(2
' '2
\2
I
i1
;1
12
1
. ~2
:2.
I
.
j1
;1
12 ...
- '1
"
11
6.4
6.2
6.4
6.2
6.4
6.2
6.4
6.2
6.4
6.2'
6.4
6.2
6.4
6.2
6.4
6.2
.6.4 .:. .... 6.2 .
6.4
6.2
6.4
6.2
6.4
6.2
6.4
6.2 ..
18
17
18
17
-
14.7
6.3
. 6.3.
6.3
6.3
6.3
6.3
6.3
o· 6.3, ..,
"6.3.
6.3
6.3
6.3
6.3
'6.3 ;
,·1
18
18
'18.
18..
18
18
18
6.4
6.4
6.4
6.4
6.4
6.4
6.4
7.9
7.9
7.9
11'
11
;1
I
'1
t
'1
j1
3
3
..3
3
3
,1
'.' ·1
,1
,1
1
.
.
8.4
6.317
6.3
...
'6.3
17
17
6.3
17
.6.3
.17
6.3 .
15*
6.3
6.2*
6.3 .
6;2*
6.3
6.2*
6.3
6.2*
6.3
6.2*
6.3
3.2
6.3
3.2 .
6.3 .
7.1
6.3
7.1
6.3
7.1
6.3
."
...
.
Bn - horizontal netopening
Hn - vertical netopening
Bs - distance Dan-Ieno to door
* means second door on S-side used.
- 12-
HnfSn
. HnfSn
HnfSn
.HnfSn
Ss
..Ss
HnfSn
' HnfSn
..HnfSn
HnfSn
HnfSn
:
Ss
.:. Bs.
HnfSn
. HnfSn
,
......
'"
BP - Bi-plane door
...
PHL - Polish High Lift
S. .. - SOberkrOb .. " .. ."
I
I
I :
1
1.1
HofSn
Ss
Ss
HofSn
HnfSn
H{lfSn
HnfSn
HnfSn
HnfSn
Ss
Ss
Ss
HnfSn
. Ss
HnfSn
HnfSn
Ss
0,
•
-
-
•
door
~
~'
~'
~
S'
C')
'G'
~
floats
I
UJ
Dan-Jena
centre line catamaran
catamaran
Sketch 0/ doors and Dan-Ieno with attachment points and codes.
Figure2
1
I
I
I
I
2
3
4
........--------"
~
I
I
I
I
-----------_
1 2 3 4
5
000..0-0-_
BP
PHL"
o
1
2
3
1
2
Dan-Iena
- 14-
Distance between Dan-leno and centreline 0/ the vessel vs. towing
speed.
Figure3
Comparative set 1
CI)
lD
>
lD
C
...
lD
c
lD
(,)
c-
lD E
lD-
.
~ 0
i) c
.c
lD
lD C
(,) GI
C
GI
- 0.79528 + 2.2020x RJl2 = 0.047
· y=
Y = 0.84951 + 1.7655x R"2 = 0.011
7·
\.
5·
BiI fI!f
d1
aJfJ
iä
3·
EJ
•
m
~
1 .lfI
l\b
0
l 1J
~-ID---,------ar-----------------'
-1 ·
••
EJ Groupa
-3 ·
• Groupb
.5
-.
•
9
Gi
CI)
0
--0
.!!r:
-0 GI
.. .. .. .....
..
..
1:1'
0
•
o
0
I
0.9 1.0
0
I
1.1
towlng
Figure4
I
I
1.2 1.3 1.4 1.5
speed
I
I
1.6 1.7 1.8 1.9 2.0
(m/s)
Distance between Dan-leno and centreline 0/ the vessel vs. towing
speed.
Comparative set 2
•
9
Y = 1.6992 - 9.0775e-2x
R"2 = 0.000
Y = - 0.16885 - 3.6366e-2x
lD
7
r:
~~
.::
C 0
Gl
R"2 = 0.000
5
C
(,)..!
c: C 3
Gl Cll
GlC
~ -g
.c
GI
8
;Gi
_
1
..
0 F"'=-=:'=";iiIiIII~=",;rrr.;.r.;~=1I::=';iIF-=-:':-:':-::':-=-:':-:':-::':-=-:':-~
-1
CI)
.!! ~ -3
" >
EJ
•
Group a
Group b
·5 4--r-r-\"'"'""'1,-'"'T.....,..-r-.....-....-...-\"'"'""'1,..-.,.,-'"'T.....,..-r-.....--r-.....-.........,.......,
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 15 -
(m/s)
Distance between Dan-Ieno and centreline 0/ the vessel vs. towing
speed.
Figure5
Comparatlve set 3
CD
y = 2.2507 - 0.69325x
9
fIl
fIl
y
CD
>
= 2.6680
R"2 = 0.058
R"2 = 0.118
- 1.0233x
7
CD
C
...
5
~
3
CD
.c
c-
E
CD
CD-
_~ 0 .
CD c
..a.!
CD
1
o
-1
c•
(,) cu
cO
cu
--0
.!! c
-0 cu
a
•
-3
Groupa
Group b
-5 4--..-~~.._~.........__.___.__r--...__r-....-....-.......,.._.__._-..-_~
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
Figure6
speed
(m/s)
Distanee between Dan-Ieno and centreline o/the vessel vs. towing
speed.
Comparatlve set 4
1 0 . , . . . . . . . . . . ; . - - - - - - - - - - - - - - - - - -....
9 y = 2.4547 - 0.71866x R"2 = 0.059
CD
fIl
fIl
Y = 1.7286 + 0.51210x
8
7
6
5
CD
>
CD
C
=
...
(,)
= 0.027
..
4
CI)
cCI)
R"2
-.
3L~I-=--=--J.~._~~r~~-1
C1)-
~j-a~Ia---.-Ji~=-~I!I!I-~~-.J
!CD
o
cCI)
..a
E
..
0
c
E1rmP
---------------------------------
-1
-2
(,) ca
cO -3
cu
--0
.!!! c -4
CD
CD C
"C
ca
-5
I!I
Group a
•
Group b
.........__.___.__r__r__r_....__r_.......,.._.__.__
-+--..-~~.._~
0.9 1.0
1.1
1.2 1.3
towlng
1.4 1.5
speed
- 16-
1.6 1.7 1.8
(m/s)
_._~
1.9 2.0
•
Distance between Dan-leno and centreline ofthe vessel vs. towing
speed.
Figure7
Comparative set 5
15...---------------------,
y = - 1.4091 + 6.5532x R"2 = 0.496
13
Cl
11
e
Cl E
.:::e
Cl 0
U
e
9
7
Cl
iCl 1ca
5
~
Q
..a
-g
1
Cl
ca
0
Cl
.,
-1
u_
eCD
';
"0
:>
3
-3
-5 -+-...,....oy-ooy-o,.-......r--.............r--r..............."""'T""""'T""""'T"_ _........- . -..............~
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
•
- 17 -
(m/s)
Figure8
Warp load vs. towing speed.
Comparative set 1
1400
1300
-r--------------------...,
y = - 480.88 + 804.04x R"2 = 0.968
1200
1100
-z
~
ca
o
.
;
Q.
1000
900
800
700
600
500
400
300
200
100
Groupa
..-~...~
EI
•
y = - 137.89 + 546.76x
R"2
P
S
= 0.834
0+--r--r-...-r_"lr--'1---r_r"""T'"..,..~..,.......-~,......,1""'"'"'1~--r_r"""T'"_i
0.9 1.0
1.1
1.2 1.3 1.4 1.5
1.6 1.7 1.8
1.9 2.0
towlng speed (m/s)
Comparative set 1
1400.,--------------------...,
1300 Y = - 406.45 + 799.00x R"2 = 0.967
-z
•
1200
1100
1000
900
800
700
600
500
400
300
Group b
200
100
y
= -
188.09 + 632.54x
R"2
EI
P
•
S
= 0.947
0+--r-~..---r_"lr--'1--.._r"""T'"..,..~..,......---..._,......,1""'"'"'1___r__r.....,.."""T'"_i
0.9 1.0 1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 18 -
(m/s)
Figure9
Warp load vs. towing speed.
Comparative set 2
1400
1300
Z
-
-r--------------y = - 363.19 + 906.27x
~_.,
R"2 = 0.993
1200
1100
1000
900
800
...a...
ca
~
700
600
500
400
Group a
300
200
100
Y,
= _335.07 + 682.91 x
EI
p
•
S
R"2 = 0.979
0+-~,.-r--~~~.;...,._r"""T""_r_.,..."T"'""~..._,~_,.___r_r...,..._l
0.9 1.0 1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
•
1400
1300
speed
(m/s)
Comparative set 2
-r------------y
= - 37.245
+ 444.90x
R"2
...,._..,
= 0.482
,1200
1100
-"z
ca
o
1000
900
800
700
a...
600
ca
500
400
300
200
100
...
~
Group b
Y = - 353.04 + 913.36x
EI
P
•
S
R"2 = 0.945
O;-"T"'""r_-r--.---."'""""T.....,._r--.-.,..-r-~oy-r_.._,I""'"""'I'___r.....,._r-r_l
0.9 1.0
1.1
1.2 1.3
towlng
1.4 1.5
speed
- 19 -
1.6 1.7 1.8
(m/s)
1.9 2.0
Figure 10
Warp load vs. towing speed.
Comparative set 3
1400
1300
-r---------------------,
y
= - 266.88
+ 792.18x
RI\2
= 0.985
1200
1100
1000
z
~
ca
o
...
0-
ca
~
900
800
700
600
500
400
Group a
300
EI
P
• s
200
100
y = - 210.65 + 644.93x
0+-...-,.--..---,,....,__,.__......,-....,--.-....-...-.,.-.,.-..---,,....,__,.__......,--.--1
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng ,speed
1400
1300
(m/s)
-r----------------
...,
y = - 67.610 + '477.85x
•
1200
1100
-z
~
ca
o
...0-ca
~
1000
900
800
700
600
500
400
•
Group b
-t.,.."':.-16:l
P
• S
EI
300
200
100
y = - 389.12 + 850.21x
O-+-...-r-..---,,....,__,.__......,-....,--.-....-...-.,.-.,.-~,....,__,.__..--r_._-1
0.9 1.0
1.1
1.2 1.3
towlng
1.4 1.5
1.6
speed
(m/s)
- 20-
1.7 1.8
1.9 2.0
Warp load vs. towing speed.
Figure 11
z
-
•
•
Group a
y
m
p
•
S
= - 27.782 + 417.99x
-z
"C
1lI
~
.
C.
1lI
~
Group b
EI
•
y
= 45.766
- 21 -
+ 347.08x
P
S
R"2 = 0.974
Warp load vs. towing speed.
Figure 12
1400
1300
-z
Comparatlve set 5
.
Y = -267.38 + 735.09x
R"2 = 0.935 .
1200
1100
1000
900
800
700
600
500
400
300
200
100
y = - 83.792 + 688.16x
O-l-"T"""-r--~r-"'lr--r--r-r"""
EI
P
•
S
R"2 = 0.992
__""""T"""-r--~r-"'lr--r--r-r
......__-1
•
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
(m/s)
•
- 22-
Divergence angle vs. towing speed.
Figure 13
Comparatlve set 1
-r-~------------------...,
20
18
C)
-
4D
-0
4D
y = 0.76599 + 7.8684x
R"2 = 0.397
16
14
12
10
8
tJ)
r:::
«I
4D
()
r:::
•
:L.-:,;-.:-.;-....--::-----l
6
,
."
...4D -2o
4D
•
C)
>
-0
Groupa
-4
EI
-6
•
P
S
-8
y = - 0.44515 + 2.4564x R"2 = 0.047
-1 0 +-.....-r-r-"'1r""""T--r-..--r-......-~r-"'1r""""T--y'......-.-........-r-......-r-'l~
0.9 1.01.11.2 1.3 1.4 1.5 1.61.7 1.8 1.92.0
towlng
speed
(m/s)
Comparative set 1
•
20
18
16
_ 14
~ 12
-0
- 10
.!!
8
C)
;
4D
g
4D
-
-
.
6
42-
y
= 9.1685
IEI
+ 2.8236x
Ba
CI:!
a:J
a:J
EI:!
IB:J
Ii!a
11;1
EIl!
.. ....
•
•
••
EII:J
l1J
•
•
't!b
EI~
~~
IEI
~a
= 0.018
lliJ
rr.r.t
.. ..
CI:!
a
m
R"2
liP
...
.. .
~
...
0 .~-------------------------------_.
-2
Group b
-0
-4
C)
-
-6 -
-8
-10
•
-
0.9 1.0
P
S
l1J
Y = 1.4023 + 1.9615x
•
1.1
•
•
1.2 1.3
towlng
•
•
1.4 1.5
speed
- 23-
•
•
R"2
1.6 1.7 1.8
(m/s)
= 0.011
•
1.9 2.0
Divergence angle vs. towing speed.
Figure 14
Comparatlve set 2
_
20
18
16
14
GI
C)
:;
6
GI
4
-
ra
m
r;fi
BEI
.• .. .. ... ..
..
I!I
EalI
Ea
~
0 -~-----~---~
-2
-4
"g
-
·
-6 ·
-8
y
-10
-
r.r.r.'I
2
~
= 0.173
m
g
..
R"2
-
10 8
~ 12
"g
-
· y = 4.1147 + 3.9868x
•
0.9 1.0
•
1.1
•
r:rs
ICI
•
--~------------_
= 2.3813
• 0.14111x
•
•
•
1.2 1.3
towlng
.
Group a
R"2
•
1.4 1.5 1.6 1.7 1.8
speed
a
p
•
S
= 0.000
•
1.9
•
2~0
(m/s)
Comparative set 2
20
18
-r---------------------,
y = 3.8194 + 2.7990x
R"2 = 0.198
16
_ 14
C)
~ 12
-10
~
:;
GI
8
6
4
fJ
j __-IIL;;:;ll1ii:"~. .~liiiiil"'"'ffi~I------l
-l
..
•
,.
~
g
2
~
0 4=-..."'="'iF,..F'=-=::4t~~:::liIiIIF"'-=_:::.,...lI:-=-'""'-:-:-::--=-:-:-="'-=-'""'-:-:-==--=I
Group b
-2
GI
~
"g
-4
a p
• S
-6
-8
y = 0.25571 - 3.8680e-2x
R"2 = 0.000
-1 0 -t-........,-...--r-..--r-"",....,......,...-..oy-r-'T-..--'T-..-..,...-r-.,..-......."'T'"""T'"'"'l
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 24-
(m/s)
•
Figure 15
Divergence angle vs. towing speed.
Comparative set 3
20
18
-r--------------------..,
2.1895 + 3.2038x R"2 0.549
y
=
0::
16
14
m
G)
12
"g
10
-
~
m
c
CIS
G)
(,)
cG)
•
m
IG)
>
"g
:t_.::!bl-I....!!~'1!l!I·~~m~;ri!l!IIlIi.iI-l
4
2
o
':I..........~...--~. .~~.-,...l~___:I~-__l
-2
-4
Groupa
·6
•
EI
P
S
-8
y = 2.3889 - 0.72851x R"2 = 0.169
-1 0 -+-....-~,.._......,r--r~_r-r..,...~.,._OW--,.._r_'1I""""'1__r__r_r_r_-l
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
(m/s)
Comparative set 3
20.,-----------------------,
18 Y = 4.6789 + 1.4661x R"2 = 0.198
_
m
G)
"C
-
16
14
12
10
8
6
G)
(,)
c
G)
4
...
~ -:r_-_-_._;-_~_ _...:l_. ._~_-_. .._:.~l_'""4_
....._._...._~_t-_-4_..._~_-_'""4_..._
..._M-_-_-_-_~_
~
G)
>
"g
j_..!.-t!I~~---fl~""'IT1I1!1!t1m_...IiIIiil--""lä"~a:E;;;;;.
'~--,
m
·2
-4
·6
Group b
a p
•
-8
S
y = 3.0389 • 0.98076x
RI\2 = 0.172
-10 -t-""-r-",.....,--r-r--.-..,-....-,-.,.....,--r-r--r-"'-""-"'_r_'1r--r--l
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng speed (m/s)
- 25-
Figure 16
Divergence angle vs. towing speed.
Comparative set 4
20
18
16
14
~ 12
~ 10
.! 8
C)
6
C
11
4
GI
U
2
C
·
...
C)
GI
>
"0
= 1.6319
+ 2.6487x
R"2
= 0.337
·
·
GI
y
·
·
·
·
-
o-
-4 -
-2
..
..
.--------------------------------~
•
.....
.-
m
Bl1
llIlI
-
ElBl1!J
Group a
a p
-
-6
-
-8
-10
0.9 1.0
•
1.1
•
Y = 2.9373 - 0.51899x
I
1.2
I
1.3 1.4
I
1.5 1.6
towlng . speed
R"2
I
S
= 0.039
I
I
1.7 1.8
1.9 2.0
(m/s)
Comparative set 4
20,..-------------------...,
18
Y = 2.9890 + 2.3006x R"2 = 0.363
_
16
14
C)
GI
~
GI
~
GI
g
12
10
8
L_..Bil~~r:~IEI~·-~~m_-,~rt!lIt;f,j~~IiIiIJ:~-l
6
4 1 _ _. . .'----:III.-=--_-JIIP-...,....~......~,....;z::;:~..,._--1
2 ~
GI
~
~
"0
--------------------------------
0
Group b
-2
-4
-6
-8
-1 0
y = 2.3713 + 0.56885x
a
p
•
S
R"2 = 0.026
+-....-~-r-~...--r--'l......,r__"I,...-,-...,.~__r"__r"__r_r_""T""_r_...._...._~
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 26-
(rn/s)
•
Divergence angle vs. towing speed.
Figure 17
- 1.7642 + 9.4919x
R"2
= 0.593
CD
C)
r:::
GI
•
CD
()
r:::
CD
C)
"-
--------------------------------
CD
>
"
EI
P
•
S
R"2 = 0.496
towlng
speed
- 27-
(m/s)
Declination angle vs. towing speed.
Figure 18
Comparative set 1
24
_
Y = 22.069 • 10.379x
R A2
= 0.863
22
20
Cl
~
-
18
G)
16
Cl
14
c
ca
c
0
ca
c
Ü
G)
~
12
Group a
10
EI
8
•
6
P
S
4
2
y
= 15.831
- 5.9536x
0
0.9 1.0
1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8
towlng speed (rn/a)
1.9 2.0
Comparative set 1
24
22
-
~
Cl
14
ca
12
.!
c
c
o
ca
c
(,)
GI
~
= 17.545
- 6.8252x
RA 2
= 0.833
20
18
~
Y
16
Group b
10
EI
P
8
•
S
6
4
2
y = 14.924 - 5.4724x
O-+-.......-r---r-T-,.-.....-r--'l,--,--,~-T--r...,.....,..~-r-
.............."'T-1
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 28-
(rn/s)
•
Declination angle vs. towing speed.
Figure 19
Comparative set 2
24
y = 20.157 - 8.0007x
R"2 = 0.949
22
_
20
C')
~
18
CD
16
g' 14
CIS
•
c:
o
;::
CIS
c:
"
12
Group a
10
EI
P
-ü
8
•
S
"
4
CD
6
y = 15.358 - 6.2161x
R"2 = 0.924
Comparative set 2
•
R"2
= 0.928
C ')
G)
~
G)
C')
c:
"as
c:
Group b
0
a
•
as
c:
u
P
S
G)
"
y
1.0 1.1
= 14.051
- 5.3951 x
R"2
= 0.919
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 29-
(m/s)
Declination angle vs. towing speed.
Figure20
Comparative set 3
24
_
Y
RII2
- 11.596x
= 0.661
22
20
m
C)
-
= 27.796
~
18
11
16
lIiJ
~ 14
Group a
GI
c
o
GI
c
12
10
EI
P
•
S
•
8
6
4
2
y
= 21.211
- 8.3915x
O+-....-...-...-~.,-r--'lr-'I--.--r--r--r
0.9 1.0
1.1
1.2 1.3
towlng
1.4 1.5
speed
RII2
= 0.684
-r-.......-r--r-....-....-~
1.6 1.7 1.8
•
1.9 2.0
(rn/s)·
Comparative set 3
24
22
y
= 37.490
m
- 16.819x
•
_ 20
m
~ 18
11
16
Group b
~ 14
GI
c
12
~
8
g
6
o 10
a
p
•
S
"C
4
2
y=26.081 -11.207x
R"2
= 0.805
o-t-....-,-...-r-r-:I'""""lr-,--.--r--r--.."""T'"-r-r--r-r-~....-..,.-...---f
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 30-
(rn/s)
Declination angle vs. towing speed.
Figure21
Comparative set 4
24
-
Y = 21.327 - 6.9786x
22
20
C)
CD
"g
.!!
C)
C
al
C
•
-
18
16
12
0
10
al
C
8
()
CD
"g
Group a
14
l:J
P
•
S
6
4
2
y = 16.806 - 6.3103x
O+-"T"""~~""''''''''r----'I~--'~'''''''~""''T''--r--.-..,.."'"T''"'"T'""''''''''''''''''.....-I
0.9 1.0 1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8
towlng
speed
1.9 2.0
(m/s)
Comparative set 4
24
•
22
Cl
CD
"g
.!!
Cl
C
al
C
-
R"2 = 0.977
18
16
Group b
14
EI
12
•
10
al
C
8
()
6
CD
Y = 21.915 - 6.7753x
20
~
"0
"T"""-------------------....,
P
S
4
2
y = 16.534 - 5.9122x R"2 = 0.964
........,.....,.._,_-.-_r_-r-_r_.,...-y_,......,......_.,.__r__r-...._f
1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
O-t-~y-,......,
0.9 1.0
towlng
speed
- 31 -
(m/s)
Figure22
Declination angle vs. towing speed.
Comparative set 5
C)
GI
"0
.!
C)
C
GI
c
o
GI
C
Ü
GI
"0
•
.. • • ..•
EI
Q!I
y
1.0 1.1
= 15.760
- 5.5046x
speed
P
•
S
RI\2 = 0.751
1.2 1.3 1.4 1.5 1.6 1.7 1.8
towlng
EI
•
1.9 2.0
(m/s)
•
- 32-
-
-
- - - --
------------
Verlical netopening vs. towing speed.
Figure23
Comparative set 1
10
Y = 15.841 - 7.6586x
RA2 = 0.915
9
-E
m
c:
c:
Cl
c...
0
8
7
6
5
Cl
c:
•
äi
u
4
3
Group a
1:
Cl
>
2
1
0-f--r-~~~~"""'r--'1--'--r--r-'-""""-'-"""""""'"'T"-r--r--r-..,-i
0.9 1.0 1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
(m/s)
Comparative set 1
10
•
-r--------------------__
y 14.212 - 6.2768x R 2 = 0.932
A
=
9
-E
m
c:
c:
Cl
c...
o
8
7
6
5
Cl
c:
4
~ . 3
.Cl..
>
2
Group b
1
O-f-..,.-r-r--I.-,.""""'T'........,-..,...-.....-r--Ir--r.-,.""""'T'.......-r-..,...-.....-~....--.f
0.9 1.0 1.1
1.2 1.3 1.4 1.5
towlng
speed
- 33-
1.6 1.7 1.8
(m/s)
1.9 2.0
Vertical netopening vs. towing speed.
Figure24
Comparative set 2
10...-----------------------,
y = 12.544 - 5.5293x RA 2 = 0.987
9
E
Cl
c:
c:
8
7
6
G)
c.
o
5
c:
4
Gi
GI
~
3
~
2
1::
1
Group a
O+-.......,_,_~,...........,I""'"'"'!___......,."""'T__r__r___r_"""T'"..,..._r__,_,_~
0.9 1.0 1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8
towlng
speed
•
1.9 2.0
(m/s)
Comparative set 2
10
""r"-------------------..,
y
_
= 13.171
RA2
- 6.2074x
= 0.972
9
8
•
E
- 7
Cl
c:
c:
6
G)
C.
o
G)
c:
-...
GI
4
~
3
~
2
1
............,.--r....,.."""T'""""T'"-.-"'T"""...._~T'"'""'11""'"'"'!~....,."""T'" __~
0-t-.,--r-~
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 34-
(m/s)
Vertical netopening vs. towing speed.
Figure25
Comparative set 3
10
-E
C)
-
5
•
ca
~
t::
Gl
>
= 0.788
7
6
C
R"2
8
c
c
Gl
C.
0
Gl
Y = 11.682 - 3.7487x
9
4
3
2
Group a
1
O+-"T""",.-T--r--I,.....,--r--r"""'T"-r""T"""-,-"T""",.-T--r--I,.....,--r~---r--t
0.9 1.0 1. 1 1.2 1.3
towlng
1.4 1.5
speed
1.6 1.7 1.8
1.9 2.0
(m/s)
Comparative set 3
10
~----------------------.
y = 11.255 - 3.7984x
R"2 = 0.987
9
_
E
-
8
7
C)
c
c
6
CI)
c.
0
5
CI)
c
ca
u
4
3
"CI)
>
2
1
Group b
0-+-.,....."T""""T"""T"""y--,-r--lr---'1...--,--r~-'T"~-'T""""T"-r-...,.....,.......,....~
0.9 1.0
1.1
1.2 1.3
towlng
1.4 1.5
speed
- 35-
1.6 1.7 1.8
(mts)
1.9 2.0
Vertical netopentng vs. towing speed.
Figure26
Comparative set 4
E 10..,.---------------------,
Y = 13.079 - 5.0117x RI\2 = 0.960
L.
9
"a
8
g
Ge
"a
;
7
g
6
.!!
•
;
o
c
5
4
G)
~
3
.a
2
'i)
G)
g11
-
.!!
"a
1
'
Group a
0-+-.,.-T"_T"""':r--I~"""'T'_r__._""T"".......,._,._T"_r__'1r__T"""'T'.....,.._r_r__I
0.9 1.0 1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
(m/s)
Comparative set 4
E 10..,.-------------------.....,
Y = 12.464 - 4.6935x RI\2 = 0.972
L.
o
o
"a
9
8
"a
C
11
o
C
G)
7
6
I
C
11
5
c
4
C
G)
CI)
~
3
G)
.a
2
G)
u
c
CII
';j
"a
1
Group b
O-t-........"'T""".,-,.-r-r--,["'1,....,~..,.-....-__r.....,....,.."""T""_r_............_r_l
0.9 1.0
1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 36-
(m/s)
•
Figure27
Vertical netopening vs. towing speed.
Comparative set 5
10..,.---------------------,
y = 16.409 . 7.9661x R"2 = 0.961
9
E
C)
8
7
c::
c::
6
-
5
CD
C-
o
CD
c::
•
III
U
4
3
1:
~
2
1
O+"""'-'-r--'1I""""T-,......,.......,..-r--r--r-,-,-r-r--'1I""""T-,.---r-r-l
0.9 1.0 1.1
1.2 1.3 1.4 1.5
towlng
speed
•
- 37-
1.6 1.7 1.8 1.9 2.0
(m/s)
Distance between Dan-leno and door vs. towing speed.
Figure28
E
...
o
o
"0
"0
C
ca
o
c
G)
Comparative set 1
10 "T"""---------------~_--""I
Y = 3.5854 + 3.4441 x
9
8
7
6
"'i'
c
ca
5
cG)
4
C
G)
~
3
•
G)
.0
2
G)
U
C
ca
.!!
"0
Group a
1
0-+-""T"""~""T"""~_r__r_,......,_,......,_.,_T"'"""T"'"""T"'"""T"'"""T"'"""r_......,r_......,~
0.9 1.0 1.1
1.2 1.3 1.4 1.5
towlng
speed
1.6 1.7 1.8 1.9 2.0
(m/s)
.'
Comparative set 1
10.,...-------------------...,
y = 4.5188 + 2.6097x R"2 = 0.988
o 9
o
-...
E
"0
"0
C
8
ca
7
..
i
6
;
5
c
4
~
3
o
c
G)
G)
CD
.0
\I)
2
U
C
-
ca
. !!
"0
Group b
0+-........y-........,r-w-.,.~_r....,....""T""-r-.,..._.._,..._,......,r__r__r......,........,......,...._1
0.9 1.0 1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 38-
(m/s)
•
---
----------------
Distance between Dan-leno and door vs. towing speed.
Figure29
E
-...
0
0
"0
"0
C
.,
Comparative set 2
10....-----------------=----...,
EI
9
8
7
..,
c
6
c
5
c
4
0
GI
c
GI
GI
•
~
Y = 5.2939 + 2.5343x
R"2 = 0.860
3
GI
.Q
2
GI
()
.,c
1
.!
0
-
"0
Group a
0.9 1.0 1.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
-o
E
o
"0
"0
C
CIl
..
o
speed
(m/s)
Comparative set 2
10 -r---------------------_~
9
8.-
7
C
GI
6
C
CIl
5-
y = 6.7621 + 1.5323x
R"2
= 0.857
C
C
GI
GI
~
4
3-
GI
.Q
2-
CD
()
C
CIl
1-
Group b
Cl')
"0
O.
0.9 1.0 1.1
I
I
1.2 1.3 1.4 1.5
towlng
speed
- 39-
I
1.6 1.7 1.8
(m/s)
I
1.9 2.0
Figure30
Distance between Dan-leno and door vs. towing speed.
E
-...
o
o
"a
"a
C
as
.
Comparative set 3
-r--------------------..,
y = 5.3787 + 1.6427x
10
R"2 = 0.929
-
98
-
_r.B
7 -1--....l:1l:I15.i"l!ill&:&:l·ii·-
.... ......
o
i
i
Q
C
6
5
4-
GI
GI
~
3
GI
.0
2-
GI
()
c:
as
CIl
"a
1-
o
Group a
•
0.9 1.0
•
1.1
I
I
I
1.2 1.3
towlng
I
1.4 1.5
speed
I
1.6 1.7 1.8
I
•
1.9 2.0
(m/s)
Comparative set 3
-_E 10
...
o
o
"a
9
Y = 4.1294 + 2.0118x
R"2
= 0.974
•
8
"a
C
as
7
o
6
c
GI
I
as
5
c:
4
-
3
C
Q
GI
GI
~
GI
.0
2
GI
()
c:
as
a;
"a
1
Group b
...........-T"""'._,~.....,..--r_r_......-T"""'....- ........~
O+....--y-._,~....,.....,...
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 40-
(m/s)
Door angles vs. towing speed.
Figure31
Comparative set 1
50
40
30
Q
C
"tJ
Groupa
angle of attack
•
trim angle
•
heelangle
1:1
20
10
c
Q
•
C
GI
0
-10
-20
y = 30.144 + 6.9410x
y = 28.330 • 18.350x
= 0.399
RI\2 = 0.798
RI\2
y = 5.8634 - 0.60506x RI\2 = 0.002
-30 +-~"'-T'"'""""""'--r"......-r--'-~T'"'""".......- - r - - r '.......-r-....-...-T'"'"""~
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
Comparatlve set
speed
(m/s)
1
50
40
30
Q
Group b
20
a
G)
~
c
angle of attack
•.. "tiim angle
10
•
heel angle
C)
c
GI
0
-10
-20
= 30.701
+ 6.2750x
RI\2
= 15.41 0 - 16.400x
.Y == 5.2248 - 5.6850x
RI\2
RI\2
y
y
= 0.174
= 0.881
= 0.283
-30 -t--.--.,.-...-,.-.....,r--r~-,...-r-r--r--.---r-...-..--.......,
.........r--r-,...-l
O.g 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 41 -
(m/s)
Door angles vs. towing speed.
Figure32
Comparative set 2
50 .. . . - - - - - - - - - - - - - - - - - - - - - ,
40
30
C)
G)
-
Group a
angle of attack
• trim angle
a heel angle
20
EI
"tJ
10
G)
C)
I::
CIS
0
-10
-20
y = 22.728 + 9.6831x
RII2 = 0.861
y = 21.567 - 20.524x
RII2 = 0.921
RII2 = 0.630
y = 10.712 - 8.5941x
-30 ~"T"""_r__r_or-r-"'1~~~~__r__r"""'T"""""'T""_r__r__r__r_"T""""T""""T""'"'"i
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
(m/s)
Comparative set 2
50
-r-----------------------,
40
30
g;
"tJ
-
~
.!!
Group b
a angle of attack
10
•
trim angle
0 flr:~~~~~I;~~~~=~a:=h=e=e':a=n~g~'e~-1
~------------
20
-10
-20
y = 29.576 + 4.0557x
R"'2
= 0.236
y = 18.310 - 13.501x
R"'2
= 0.796
RII2
= 0.220
y
-30
= 9.6695
- 4.9759x
+-_r_"T"'"""T"'"".,.-or-.......,~_..__,.~__r__r__r"""'T""_r_....,..._r__r__r_"T"'""'4
0.9
1.0
1.1
1.2 1.3
towlng
1.4 1.5
speed
- 42-
1.6 1.7 1.8
(m/s)
1.9 2.0
•
I
I
!
Door angles vs. towing speed.
Figure33
Comparative set 3
50.,.-.-------------------..,
y = 17.862 + 6.0595x RI\2 = 0.221
40
Cl
1Il
"C
-
B
20
•
•
10
G)
Cl
c
GI
•
Group a
angle of attack
trim angle
heel angle
a
0
-10
-20
Y = - 13.257 + 1.6567x
Y = - 29.336 + 16.779x
-30 -i--.--r--r-r--'lr--r--r-r-r"""T'"-.---.--r--r-,......,r--T--r-r-r..,..-I
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
(m/s)
Comparative set 3
50
Cl
4Il
"C
-
40
Group b
a angle of attack
30
•
a
Y
= 23.009
- 0.84685x
10
G)
GI
trim angle
heel angle
20
y= - 8.7997 - 0.51861x
Cl
c
-r----------------~---...,
0
-10
-20
y = - 39.801 + 20.620x RI\2 = 0.741
·30 +-~-r-,......,,....,~__r__.._..,.....,......._~..__r_...__....._r__r-r__.._-r--I
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng
speed
- 43-
(m/s)
\
\
Figure34
Door angles vs. towing speed.
Comparative set 4
50
-r---------------------,
Group a
angle of attack
40
I:J
30
-
20
"0
10
•
trirn ~ngle
•
heel angle
CD
GI
.!
CD
C
0
ca
-10
-20
y = 27.715 - 3.3087x
Y = 17.445 - 6.1177x
R"2 = 0.601
R"2 = 0.687
Y = - 28.408 + 15.179x R"2 = 0.788
-30 -+-...._-r--r-,_..._r-""'l..-..---w,......,.--r-r--...--..."""T'"~_r__r_...._...._..........-I
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng speed (m/s)
Comparative set 4
50.,...----------------------,
40
Group b
angle of attack
EI
30
CD
-
20
•
trirn angle
•
heel angle
GI
"'C
10
GI
CD
C
ca
0
-10
= 19.608 - 2.5186x R"2 = 0.536
= 23.979 - 9.1829x R"2 = 0.857
Y = - 12.820 + 8.7052x R"2 = 0.605
y
-20
Y
-30 ;-~~...-r-.,....,--r"""T'""""'T""_,_...,.-,_,-~T'"""'1r__r~.....,....__,_~~
0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0
towlng speed (m/s)
- 44-
•
Door angles vs. towing speed.
Figure35
Comparatlve set 5
40 - - - - - - - - - - - - - - - - - - - - - - - .
35
-t--J...r-liI~_~~5-=:..::m._:::l~-~-__1
30
-
25
15
y = 28.541 + 1.0184x
y = 16.656 - 11.788x
~
ca
10
y
~
20
"tl
GI
= 7.5530
RJ\2 = 0.049
EI
angle of attack
RJ\2 = 0.898
•
trim angle
= 0.454
•
heel angle
RJ\2
- 3.1003x
5
o
-5
•
-1 0 +~,_...-~...-,.....,I""'"'"1:__",..._y--T__r.....,.._r-r".,..-r-...,_......._r_....-i
0.9 1.0 1.1
.1.2 1.3
1.4 1.5
towlng speed
- 45-
1.6 1.7 1.8
(m/s)
1.9 2.0