Comparison of Time-Based Non-Active Power Definitions for Active Filtering

Comparison of Time-Based Non-Active Power Definitions for Active Filtering
Leon M. Tolbert,
Senior Member, IEEE
The University of Tennessee
Electrical and Computer Engineering
Knoxville, TN 37996-2100
Tel: (865) 974-2881
Fax: (865) 974-5483 e-mail: tolbert@utk.edu
Abstract
Many definitions have been formulated to characterize non-active power for nonsinusoidal waveforms in electrical systems, and no single, universally valid power theory has been adopted as a standard for non-active power. Most of the non-active power theories formulated thus far have had a particular type of compensation in mind, which has influenced the conventions used in the development of the definitions.
Because nonsinusoidal loads are expected to continue to proliferate throughout electrical distribution systems, nonactive power theories will only grow in importance for applications such as non-active power compensation, harmonic load identification, voltage distortion mitigation, and metering.
This paper presents a comprehensive technical survey of the published literature on the topic and briefly outlines the salient points of each of the different theories as well as each one’s applicability to active power filtering.
Thomas G. Habetler,
Senior Member, IEEE
Georgia Institute of Technology
Electrical and Computer Engineering
Atlanta, GA 30332-0250
Tel: (404) 894-9829
Fax: (404) 894-4641 e-mail: tom.habetler@ece.gatech.edu
additional losses in the generation and transmission system pay for those losses, whereas customers want utilities to supply them with voltage that contains no distortion.
Instantaneous active power p(t) is defined as the time rate of energy transfer or energy utilization. It is a physical quantity and satisfies the principle of conservation of energy
[5]. For a single-phase circuit, it is defined as the instantaneous product of voltage and current: p ( t )
= u ( t ) i ( t ) .
(1)
Active power P is the time average of the instantaneous power over one period of the wave p(t).
For a polyphase circuit with M phases, instantaneous active power is the sum of the of the active powers of the individual phases:
Keywords: non-active current, non-active power, reactive current, reactive power, active power, var compensation p ( t )
= m
M
∑
=
1 u m
( t ) i m
( t )
= m
M
∑
=
1 p m
( t ) .
(2)
I. I NTRODUCTION
Non-active power theories for nonsinusoidal waveforms were first formulated in the 1920’s and 1930’s by Budeanu
[1, 2] and Fryze [3, 4]. Because the vast majority of the generation and use of electrical energy at that time involved periodic, sinusoidal waveforms, these two theories were not developed further by others until the 1970’s when widespread use of power electronic converters made study of the subject more than just an academic exercise. The nonsinusoidal, non-periodic loads and voltage waveforms present in today’s electrical systems have made the issue of instantaneous nonactive power a contentious subject of discussion as several different theories and analyses have been formulated in the last 30 years.
Closely related to the definitions of active and non-active power are the definitions of apparent power and power factor.
Several proposals have been made for the definition of both, but no consensus has been reached for these two conventional quantities. Metering non-active power and assigning causality to the various components of non-active power is another area that has received much attention lately. Utilities are interested in ensuring that customers who cause
Non-active power is not a physical quantity but can be thought of as the useless energy that causes increased line losses and greater generation requirements for utilities.
Because non-active power is a conventional quantity, the conservation of non-active power does not hold true. The first definitions of non-active power involved rms or average values, and not until more recently did expressions for instantaneous non-active power appear in the literature.
Most of the theories have chosen voltage to be a reference and to decompose current into an active component that is responsible for the transmission of the active power and an oscillating non-active component that yields zero average active power. These theories are formulated with the goal of identifying and eliminating non-active power, or non-active current, to improve the power factor of an electrical system.
While some authors restricted their analyses to the time- or frequency-domain, others formulated a more unifying concept by utilizing both domains.
Frequency-based theories were generally developed for metering or power systems that had steady-state harmonic components instead of active filtering as their main objective; thus, these definitions are not considered in this paper. Most
1/7
of the time-based theories had some application of non-active power filtering in mind when they were developed, and thus these are the focus of this paper.
This paper presents a technical survey of the published literature on the topic of non-active power and briefly outlines the salient points of each of the different theories. The applicability of each of the different theories and a comparison between them are also included in this paper.
II. I
NITIAL
O
RTHOGONAL
C
URRENTS
T
HEORY
Fryze introduced his idea of non-active power in 1931 [3] by using a time-based approach where he decomposed the source current i into an active component i a
, which had the same waveform as the source voltage u , and a non-active component i n
by the following equations: i a
≡
P u
2 u , i n
≡ − i a
(3) elements or not. They defined the active current i a
the same as Fryze in (3), but subdivided the instantaneous non-active current i - i a into two components - an inductive or capacitive reactive current, i ql
or i qc
, and a residual reactive current.
Their theory reasoned that the inductive (capacitive) reactive current could be completely compensated by means of adding a capacitor (inductor) in parallel with the load. They defined u as the instantaneous value of the alternating component of
∫ u dt , or in other words, that portion of the voltage that did not contribute to the active power transfer from the source to the load. They then defined the inductive (capacitive) reactive current as follows: i ql
= u (
1
T
0
T
∫ u i dt ) / u
2
, i qc
= u (
1
T
& ) / u &
2
.
(6)
Because compensation by means of passive elements did not eliminate all of the non-active current, they defined that portion of the current which could not be compensated as the residual reactive current, i qlr
or i qcr
: i qlr
= −
i a
−
i ql
, i qcr i i a
−
i qc
.
(7) where u is the rms value of u and P is the average active power over one period. Because i a
and i n
are mutually orthogonal, the following holds true: i
2 = i a
2 + i n
2
.
(4)
By multiplying (4) by u
2
, Fryze obtained the following for non-active power Q
F
:
Kusters and Moore’s definition is valid for single-phase applications where compensation by only passive elements is considered [8]. Because their definition, like Fryze’s, depends on RMS or average values over some time period, it does not lend itself to real-time compensation.
S 2
=
P 2
+
Q 2
F
, Q
F
≡ u i n
=
S
2 −
P
2
Fryze’s theory has been found to be fundamentally sound
[4], and several authors have extended his definition by considering multiple phases or by modifying the equation for i a
in (3).
III. T IME -D OMAIN N ON -A CTIVE P OWER T HEORIES
(5)
B. Polyphase Orthogonal Currents (FBD Method)
Depenbrock extended Fryze’s definition of non-active power and current decomposition method for a single phase to a polyphase system with M phases [9]. Because he also incorporated some of the apparent power theory published by
Buchholz [10], he named his power theory the FBD method after the three contributing authors. Buchholz defined the instantaneous collective value of currents and voltages and the collective RMS value of the currents and voltages in a system with M phases as
One of the main thrusts behind the definition of nonactive power has largely been to build compensators that will improve the power factor to unity without incurring additional power losses in the electrical system. Many of the definitions outlined in the following sections have been developed and used to design these compensators and their controls.
i
∑
=
υ
∑ M
=
1 i
2
υ
, i
∑
2 =
υ
M ∑
=
1 i
υ
2
, u
∑
=
υ
M ∑
=
1 u 2
υ
, u
∑
2 =
υ
M ∑
=
1 u
υ
2
.
(8)
A. Inductive and Capacitive Power
Kusters and Moore [6] (and later generalized by Page [7]) extended Fryze’s decomposition theory for periodic nonsinusoidal waveforms in 1979 based on whether the nonactive current could be compensated by means of passive
Depenbrock defined collective instantaneous power p
∑
, collective instantaneous conductance G p
( ) , instantaneous collective power current i
∑ p
, and instantaneous phase power currents i
υ p as
2/7
p
∑
( )
=
υ
M ∑
=
1 u i
υ
=
υ
M ∑
=
1
υ
G t
= p
∑ u
2
∑
, i
∑ p
=
( )
∑
, i
υ p
=
( )
υ
.
,
(9)
Depenbrock then defined the phase zero power currents i υ z as i
υ z i i
υ p
, (10) and noted that this component of the current can theoretically be compensated without any time delay (instantaneously). He then decomposed the power currents into active currents i
υ a and variation currents i
υ v
by introducing the equivalent active conductance G, which depended on the mean values of p
∑
and u
Σ
.
Expressions for these quantities are given as
G
= p u 2
∑
∑
, i
υ a
=
G u
υ
, i
υ v
= i
υ p
− i
υ a
.
The non-active currents i
υ n
then could be written as i
υ n i
υ i
υ a
= i
υ z
+ i
υ v
.
(11)
(12)
Complete compensation of the non-active currents is only possible under steady state conditions because the variation currents depend on time average values of power and voltage.
Depenbrock also developed a decomposition of the nonactive current into orthogonal symmetrical and purely unsymmetrical components for an unsymmetrical load [11].
The FBD method can be applied to a multiphase, steady state, periodical system for compensation purposes.
C. Nonperiodic Waveforms where R ui
was the maximum value of the crosscorrelation between voltage and current waveforms, which occurred at the point in the time interval dT where maximum similarity between voltage and current waveforms was present. With the
Hilbert transform of the voltage, Enslin and Van Wyk then defined the instantaneous reactive current as
( )
= { }
, where
{ } =
1
π
∞
− ∞
∫ u ( ) d
τ − t
. (17)
They then defined the instantaneous deactive current as i d
= − i a
− i r
.
(18)
The mutual orthogonality of the current components leads to the following apparent power relation
S 2
=
P 2
+
F 2
=
P 2
+
Q 2
+
D 2 .
(19)
Although Enslin and Van Wyk extended Fryze’s theory to nonperiodical single-phase systems, their values of the autocorrelation and crosscorrelation functions in (13) and
(14) depended on the length of the interval dT and the interval start time.
In 1988, Enslin and Van Wyk [12-15] generalized Fryze’s time-domain principles to single-phase nonperiodic waveforms by using correlation techniques and also further decomposed the non-active power into a reactive component
Q and a deactive component F . To find the effective value of current or voltage, they used the time-domain autocorrelation function
R uu
=
1 dT dT
∫
0 u t u t
− τ
) dt ,
U
=
[ ]
, I
=
[ ]
. (13)
To calculate active power P and an equivalent conductance G , they used the time-domain crosscorrelation function
R ui
=
1 dT
0 dT
∫ u t i t
− τ
) dt , P
=
R ui
0 , G
=
U
P
2
. (14)
They then defined the instantaneous active and non-active current the same as Fryze
( )
=
( ) , i n i i a
.
(15)
In order to decompose the non-active current into reactive i r
and deactive i d
components, they calculated the reactive power Q and equivalent susceptance B as
Q
=
[
$
2 ui
−
R 2 ui
]
, B
=
Q
U 2
, (16)
D. Instantaneous Orthogonal Currents
Rossetto and Tenti [16] proposed an extension of Fryze’s decomposition method to multiphase systems and also modified equation (3) by using instantaneous values as follows: i v p
= v u r u
T ⋅ i v v v u T
⋅ u
= v u v p u
2
.
(20)
3/7
instantaneous non-active current appeared in the literature.
E. p-q Theory i v q
= − i p
. They also formulated expressions for the instantaneous active power p , instantaneous non-active power q , and instantaneous apparent power s , where s
2
= p
2
+ q
2
, as follows: p
= v i v p
, q
= u i q
, s
= v i v
.
(21)
Rossetto and Tenti’s theory appears to be truly instantaneous and not limited to periodic waveforms.
Compensation techniques with this theory have not yet
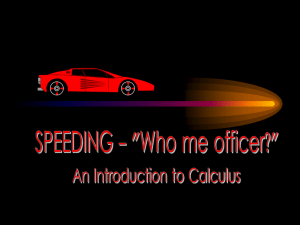
In 1983, Akagi and coauthors [17-18] introduced a novel concept, the p-q theory, by applying Park’s transformation to a three-phase, three-wire system (a-b-c) to change it to a twophase plane (
α
-
β
) and an orthogonal reactive axis as shown in Fig. 1. They also showed how this theory could be used for three-phase, four-wire systems by introducing the zero-phase sequence components. The p-q theory transforms instantaneous voltage and current measurements by the following matrix equations:
u
0
u
α
= u
β
2
3
1 /
1
2 1
−
/ 2 1
−
/ 2
0
−
u a
/
u b u c
, (22)
i
i
0 i
α
β
=
2
3
1 /
1
2 1
−
/ 2 1
−
/ 2
0
−
/
i
i
i a b c
.
(23)
Akagi and coauthors then defined the Park instantaneous active power p p
and the zero phase-sequence instantaneous power p o as follows: p p
= u
α i
α u
β
⋅ i
β
, p u i
0 0
, p
= p p
+ p
0
= u i
+ u i
+ u i .
(24)
| r v q
imaginary axis v u
α
× i v
β i v
β introduced errors in some
F. Park Power p-q v u
β
For symmetrical voltage sources, |
β real plane i v
α v u
α
α v u
β
× i v
α
Fig. 1. Instantaneous space vectors of voltage and current for pq-theory.
r q | is equal to the threeq | is not equal to the three phase reactive power. This has
control algorithms [19].
Using Akagi’s Park transformation of phase voltages and currents, Ferrero and Superti-Furga [20-21] defined their instantaneous non-active power differently, which enabled them to generalize their theory based on power definitions.
Instead of an
α
-
β
real plane with an orthogonal imaginary axis q , they used a direct-quadrature ( d-q ) plane. In a three phase system, they transformed instantaneous voltage and currents to Park vectors ( voltages v
( ) d-q
and currents
only, without zero sequence) of defined the Park instantaneous complex power as v p
( )
= v u t i v
∗ t .
(26) space vector r q defined by r q
= v u
α
× + v u
β
× i r
α
.
(25)
As seen in Fig. 1, this space vector is an imaginary axis vector perpendicular to the
α
-
β
coordinate real plane and is in orthogonal axes. This meant that r q could not be dimensioned in W, VA, or VAR.
By expanding (26), they defined the Park real power and Park imaginary power as p t p
=
Re
[ ]
= u i d d
+ u i q q
,
( )
=
Im
[ ]
= u i
− u i .
(27)
Next, they stated that the instantaneous active power p(t) is the algebraic sum of the zero sequence power p
0
(t)=u
0 i
0
and the Park power in (27). The only difference between Ferrero’s approach and Akagi’s approach is that the Park imaginary power (instantaneous non-active power) defined by Ferrero is a characteristic quantity of the three-phase system whereas
Akagi’s instantaneous imaginary power is not.
4/7
In addition, Ferrero and Superti-Furga used Park vectors for current and voltage to extend Fryze’s theory to three-wire, vectorial equations for active currents v currents i t : v
( ) and residual v i t a
( )
=
P
U p
2
⋅ v
( ) , individual phases.
power.
v x
( )
= v i t
− v i t .
(28)
They then noted that non-active power compensation based on these vector definitions would be more effective than separate time-domain decomposition for each of the
The p-q theory has been widely used for active compensation in three phase systems. Drawbacks of the original theory is that it does not lend itself to compensation by passive energy storage components and could not be used for single phase or multiphase systems. Also, zero sequence components are completely attributed to active power without consideration that they may also contribute to non-active instantaneous active current (30) and active current defined by Fryze (3). All of the terms in (30) are instantaneous ones, whereas those in (3) have RMS and average values over a period T . Willems theory enables compensation without energy storage devices whereas those of Fryze or Kusters and
Moore do not.
H. Polar Coordinates
G. Multiphase Generalization of the p-q Theory
In 1992 Willems [22] generalized Akagi’s and Ferrero’s p-q theories for three-phase systems to polyphase systems.
For an electrical system with m phases, Willems represented the instantaneous currents and voltages by m -dimensional vectors v
( ) . The instantaneous active power transmitted is the scalar product of these two vectors:
( )
= v
( ) T v
( ) .
(29)
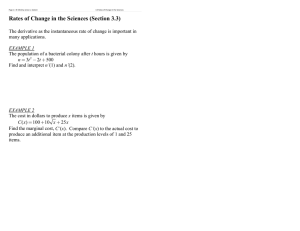
Recently, Nabae and Tanaka [23] proposed a new method of calculating active and non-active current and power in three-phase, three-wire circuits based on instantaneous space vectors with polar coordinates. Their technique is similar to the p-q theory transformation except that active and nonactive currents can be calculated directly from the instantaneous voltage v u and current i v
space vectors instead of calculating powers first. They defined the instantaneous voltage and current space vectors as v u
=
2
3
( u a
+ u b
ε j
2 π
3
+ u c
ε j
4 π
3 )
= u t
ε j
θ t
, i r
=
2
3
( i a
+ i b
ε j
2
π
3
+ i c
ε j
4
π
3 )
= i t
ε j
{
θ t
+ φ t
}
, (33) i where b
, and u
i between a
, u c v u b
, and u
and i c
are instantaneous phase voltages and are instantaneous line currents. The angle
φ i a
(t)
,
is also an instantaneous value. The authors then applied a rotating-coordinate transformation to to fix the vectors on a
γ δ v u u
and i
as the reference vector as shown in Fig. 2. This transformation led to expressing v u and i v
as the vector v
( ) onto the vector v
( ) : v
( )
= v
( )
2 v
( ) , (30) where | v u |
2
= v u T v u . Instantaneous non-active current is then v q
( )
= v
( )
− v p
( ) .
(31) i v q
δ
φ i v p i v u v u
γ
Willems then defined the magnitude of the instantaneous imaginary power as
= v v u t i t .
(32)
A positive or negative sign can be associated with q(t) only for three-phase systems without zero sequence components.
In more general cases, this is not possible.
One should note the difference in Willems definition of
Fig. 2. Space vectors of current and voltage in
γ
coordinates.
v u
=
( ) ,
Nabae and Tanaka then decomposed i v
into instantaneous active and non-active components as follows: i t
= i t
φ t , i v
=
( )
ε j
φ t
.
(34) i t
= i t
φ t . (35)
5/7
Then, the instantaneous active power p(t) and instantaneous non-active power q(t) are defined as p t
= u t i t
= u t i t
φ t , q t
= u t i t
= u t i t
φ t . (36)
J. Generalized Non-Active Power
Peng [26] extended Fryze’s theory to multiphase and/or non-periodic systems. He defined the active current and nonactive current using the following equations: i v p
( t )
=
U
P ( t )
2 p
( t ) v u p
( t ) , i v q
( t )
= i v
( t )
− i v p
( t ) (38)
Nabae and Tanaka also noted that i p
(t) , i q
(t), p(t) , and q(t) could be decomposed into currents and powers originating from fundamental frequency symmetrical conditions and from harmonic or unsymmetric conditions, but did not elaborate on how to do this decomposition or what its application may be.
Their theory, like the original p-q theory, is restricted to three phase systems.
where U p
( t )
=
1
T c t
− t
∫
T c v u p
(
τ
)
⋅ v
T u p
(
τ
) d
τ
(39)
I. Generalized Instantaneous Reactive Power
Peng [24-25] has proposed a generalized instantaneous reactive power theory for three-phase systems by considering zero sequence components to contribute to non-active power and active power whereas the pq theory erroneously limits their contribution to active power only. Instead of first decomposing the current into orthogonal components and then calculating powers like Willems or Rossetto, they define power components first and then decompose the current.
Peng expressed voltage and current for a three-phase system as instantaneous space vectors, and defined the instantaneous active power to be the inner product of these vectors just like Akagi in (24). He also defined the instantaneous non-active power vector to be the cross product of the voltage vector and current vector and its magnitude as the instantaneous non-active power q : v q
= × =
q
q
q c b a
=
u b u c i b i c u c u a
u a u b i i c a i i a b
, q
= v q
= q
2 a
+ q
2 b
+ q
2 c
(37)
He then defined the instantaneous active current vector, i v p the same as Rossetto in (20), the instantaneous non-active current vector i v q v v
= × u
2 u
, and the instantaneous apparent power s the same as Rossetto in (21).
Peng’s generalized instantaneous power theory for threephase systems is also applicable to unbalanced systems and three-phase four-wire systems which have zero sequence components.
and P ( t )
=
1
T c t
− t
∫
T c p (
τ
) d
τ
(40) v u of p
( v u t )
( t ) is the reference voltage, which can be chosen as the voltage itself,
, where v u p v u
( t
( t
)
)
=
= v u v u
( f t )
( t
; or as the fundamental component
)
+ v u h
( t ) and v u p
( t )
= v u f
( t ) ; or as something else depending on the compensation objectives.
Peng showed that this definition was valid for singlephase or polyphase circuits as well as for nonsinusoidal and nonperiodic waveforms. He also showed that many of the previous definitions can be deducted from (38 – 40).
IV. C
ONCLUSIONS
A nonsinusoidal electrical system has numerous degrees of freedom and the number of parameters required to completely describe the system could theoretically be infinite. For this reason, no single, universally valid power theory has been formulated for nonsinusoidal conditions. Most of the timebased non-active power theories formulated thus far have had a particular type of compensation in mind, which has influenced the conventions used in the development of the definitions. It should also be noted that there are also just as many definitions formulated using some form of a frequency harmonic decomposition basis.
Table I summarizes the applicability of each of the theories discussed in the preceding sections. The table shows if each definition is applicable to single-, three-, or multiplephase systems and whether the definition has a periodic or averaging basis or whether the definition uses instantaneous measurements.
Because nonsinusoidal loads are expected to continue to proliferate throughout electrical distribution systems, nonactive power theories will only grow in importance for applications such as non-active power compensation, harmonic load identification, voltage distortion mitigation, and metering.
6/7
Table I. Time-Based Non-Active Power Definition Comparison
Phases
Time
Period
Single Three Multiple Avg. Inst.
Theory [Reference]
Orthogonal Currents [3]
Inductive and Capacitive Power [6]
Polyphase Orthogonal Currents [9]
Nonperiodic Waveforms [12]
Instantaneous Orthogonal Currents [16] p-q Theory [17]
Park Power [19]
Multiphase p-q Theory [22]
Polar Coordinates [23]
Generalized Instantaneous Reactive
Power [24]
Generalized Non-active Power [26]
X
X
X
X
X
X
X
X
X
X
X
X
X X X
X
X
X X
X
X
X
X
X
X
X
R
EFERENCES
[1] C. I. Budeanu, “Reactive and Fictitious Powers,” Inst. Romain de
I’Energie, Bucharest, Rumania, 1927. (In Romanian)
[2] L. S. Czarnecki, “What Is Wrong with the Budeanu Concept of Reactive and Distortion Power and Why It Should Be Abandoned,” IEEE Trans.
Instrum. Meas., vol. 36, Sept. 1987, pp. 834-837.
[3] S. Fryze, “Active, Reactive, and Apparent Power in Non-Sinusoidal
Systems,” Przeglad Elektrot., no. 7, 1931, pp. 193-203. (In Polish)
[4] H. Supronowicz, J. Janczak, “Compensation of the Reactive Power Drawn from the Line by Nonlinear Consumers ,” Conference Record - IEEE IAS
Annual Meeting , 1990, pp. 1093-1098.
[5] IEEE Standard Dictionary of Electrical and Electronics Terms, 1993, pp. 988-989.
[6] N. L. Kusters, W. J. M. Moore, “On the Definition of Reactive Power under Non-Sinusoidal Conditions,” IEEE Trans. Power Apparatus Sys.,
Vol. PAS-99, Sept. 1980.
[7] C. H. Page, “Reactive Power in Nonsinusoidal Situations,” IEEE Trans.
Instrum. Meas.
, vol. IM-29, Dec. 1980, pp. 420-423.
[8] L. S. Czarnecki, “A Time-Domain Approach to Reactive Current
Minimization in Nonsinusoidal Situations,” IEEE Trans. Instrum. Meas.
, vol. 39, Oct. 1990, pp. 698-703.
[9] M. Depenbrock, “The FBD Method, a Generally Applicable Tool for
Analyzing Power Relations,” IEEE Trans. Power Systems, vol. 8, May
1993, pp. 381-387.
[10] F. Buchholz, “Das Begriffsystem Rechtleistung, Wirkleistung, Totale
Blindleistung,” Selbstverlag Munchen , 1950.
[11] M. Depenbrock, “Some Remarks to Active and Fictitious Power in
Polyphase and Single-Phase Systems,” ETEP, vol. 3, Jan. 1993, pp. 15-19.
[12] J. H. R. Enslin, J. D. Van Wyk, “Measurement and Compensation of
Fictitious Power Under Nonsinusoidal Voltage and Current Conditions,”
IEEE Trans. Instrum. Meas., vol. 37, no. 4, Sept. 1988, pp. 403-408.
[13] J. H. R. Enslin, J. D. Van Wyk, “A New Control Philosophy for Power
Electronic Converters as Fictitious Power Compensators,” IEEE Trans.
Power Electronics , vol. 5, no. 1, Jan. 1990, pp. 88-97. Discussion, vol. 5, no. 4, Oct. 1990, pp. 503-504.
[14] J. H. R. Enslin, J. D. Van Wyk, M. Naude, “Adaptive, Closed-Loop
Control of Dynamic Power Filters as Fictitious Power Compensators,”
IEEE Trans. Industrial Electronics, vol. 37, June 1990, pp. 203-211.
[15] D. A. Marshall, J. D. Van Wyk, “An Evaluation of the Real-Time
Compensation of Fictitious Power in Electric Energy Networks,” IEEE
Trans. Power Delivery , vol. 6, Oct. 1991, pp. 1774-1780.
[16] L. Rossetto, P. Tenti, “Evaluation of Instantaneous Power Terms in Multi-
Phase Systems: Techniques and Applications to Power-Conditioning
Equipment,” ETEP, vol. 4, Nov. 1994, pp. 469-475.
[17] H. Akagi, Y. Kanazawa, A. Nabae, “Instantaneous Reactive Power
Compensators Comprising Switching Devices without Energy Storage
Components,” IEEE Trans. Ind. Applicat., vol. IA-20, no. 3, May 1984, pp. 625-631.
[18] H. Akagi, A. Nabae, “The p-q Theory in Three-Phase Systems under Non-
Sinusoidal Conditions,” ETEP, vol. 3, Jan. 1993, pp. 27-31.
[19] M. Kohata, et. al., “A Novel Compensator Using Static Induction
Thyristors for Reactive Power and Harmonics,” Conference Record –
Power Electronics Specialists Conference, 1988, pp. 843-849.
[20] A. Ferrero, G. Superti-Furga, “A New Approach to the Definition of Power
Components in Three-Phase Systems under Nonsinusoidal Conditions,”
IEEE Trans. Instrum. Meas.
, vol. 40, June 1991, pp. 568-577.
[21] A. Ferrero, A. P. Morando, R. Ottoboni, G. Superti-Furga, “On the
Meaning of the Park Power Components in Three-Phase Systems under
Non-Sinusoidal Conditions,” ETEP, vol. 3, Jan. 1993, pp. 33-43.
[22] J. L. Willems, “A New Interpretation of the Akagi-Nabae Power
Components for Nonsinusoidal Three-Phase Situations,” IEEE Trans.
Instrum. Meas.
, vol. 41, Aug. 1992, pp. 523-527.
[23] A. Nabae, T. Tanaka, “A New Definition of Instantaneous Active-Reactive
Current and Power Based on Instantaneous Space Vectors on Polar
Coordinates in Three-Phase Circuits,” Conference Record - IEEE/PES
1996 Winter Meeting , Baltimore, Md.
[24] F. Z. Peng, J. S. Lai, “Generalized Instantaneous Reactive Power Theory for Three-Phase Power Systems,” IEEE Trans. Instrum. Meas., vol. 45, no. 1, Feb. 1996, pp. 293-297.
[25] F. Z. Peng, G. W. Ott, Jr., D. J. Adams, “Harmonic and Reactive Power
Compensation Based on the Generalized Reactive Power Theory for
Three-Phase Four-Wire Systems,” IEEE Trans. Power Electronics, vol.
13, no. 6, Nov. 1998, pp. 1174-1181.
[26] F. Z. Peng, L. M. Tolbert, “Compensation of Nonactive Current in Power
Systems - Definitions from a Compensation Standpoint,” IEEE Power
Engineering Society Summer Meeting, July 15-20, 2000, Seattle, WA, pp. 983-987.
V. B
IOGRAPHIES
Leon M. Tolbert (S’88-M’91-SM’98) received the B.E.E., M.S., and Ph.D.
degrees in electrical engineering from the Georgia Institute of Technology,
Atlanta.
He joined the Engineering Division of Lockheed Martin Energy Systems in
1991 and worked on several electrical distribution projects at the three U.S.
Department of Energy plants in Oak Ridge, Tennessee. In 1997, he became a research engineer in the Power Electronics and Electric Machine Research
Center at the Oak Ridge National Laboratory. In 1999, he was appointed as an assistant professor in the Department of Electrical and Computer Engineering at
The University of Tennessee, Knoxville.
Dr. Tolbert is a Registered Professional Engineer in the state of Tennessee.
Thomas G. Habetler (S’82-M’83-S’85-M’89-SM’92) received the B.S.E.E.
degree in 1981 and the M.S. degree in 1984, both in electrical engineering, from
Marquette University, Milwaukee, WI, and the Ph.D. degree from the University of Wisconsin-Madison, in 1989.
From 1983-1985 he was employed by the Electro-Motive Division of
General Motors as a Project Engineer. While there, he was involved in the design of switching power supplies and voltage regulators for locomotive applications. He is currently an Associate Professor of Electrical Engineering at the Georgia Institute of Technology, Atlanta, USA. His research interests are in electric machine protection and condition monitoring, switching converter technology, and drives.
Dr. Habetler serves as Vice President of Operations for the IEEE Power
Electronics Society, and Chair of the Industrial Power Converter Committee of the Industry Applications Society.
7/7