a Engineer-to-Engineer Note EE-215
advertisement

Engineer-to-Engineer Note
a
EE-215
Technical notes on using Analog Devices DSPs, processors and development tools
Contact our technical support at dsp.support@analog.com and at dsptools.support@analog.com
Or visit our on-line resources http://www.analog.com/ee-notes and http://www.analog.com/processors
A 16-bit IIR Filter on the ADSP-TS20x TigerSHARC® Processor
Contributed by Rickard Fahlqvist
November 6, 2003
Introduction
This document describes an implementation of a
2nd order 16-bit IIR filter on the ADSP-TS20x
TigerSHARC® processor. The implementation
uses the direct form II.
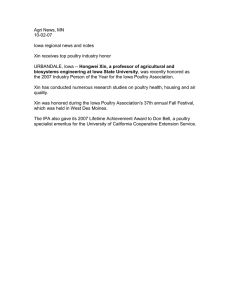
The structure of the 2nd order filter is shown in
Figure 1. To achieve filters of orders higher than
two, several 2nd order filters can be cascaded or
connected in a parallel fashion. Note that the
resulting filter will have an order that is a
multiple of 2. For an odd number of ordered
filters, a 1st order filter is needed in addition to
one or several 2nd order filters. This is not
implemented in the example code presented in
Listing 3.
w[i]
+
y[i]
b0
+
b1
+
z-1
+
a1
z-1
a2
2
w[i ] = x[i ] + ∑ ak w[i − k ]
k =1
2
y[i ] = ∑ bk w[i − k ]
k =0
Filter Structure
x[i]
The equations that characterizes this type of filter
structure are described in Equation 1.
b2
Figure 1. 2nd order direct form II
Equation 1. Characterizing 2nd order direct form II IIR
The first numerator coefficient (b0) can always
be set to unity by scaling the input, x[i], with b0
and dividing b1 and b2 by b0. This has been used
in the example implementation in listing 1
below.
Implementation
Implementing small recursive algorithms on
pipelines presents a difficult problem. In this
filter, the value of w at iteration i depends on the
value of w at iteration i-1. This loop-carried
dependence limits the degree to which the
operations may be pipelined. In this program, all
multiplications required to produce w[i] and y[i]
are computed in a single cycle. However, to add
the input with the partial results in order to get
the final output takes 5 cycles. During this time,
there is no available parallelism to keep the
multiplier busy. As a result, this program can
only use one compute unit. The operations used
to administer the delay line (as well as the
memory fetches) are associated with the ALU, so
filling multiple instruction slots per instruction
line becomes an issue. As mentioned above, if a
Copyright 2003, Analog Devices, Inc. All rights reserved. Analog Devices assumes no responsibility for customer product design or the use or application of
customers’ products or for any infringements of patents or rights of others which may result from Analog Devices assistance. All trademarks and logos are property
of their respective holders. Information furnished by Analog Devices Applications and Development Tools Engineers is believed to be accurate and reliable, however
no responsibility is assumed by Analog Devices regarding technical accuracy and topicality of the content provided in Analog Devices’ Engineer-to-Engineer Notes.
a
higher order filter is required, you can implement
it as parallel 2nd order filters. In this case, two
filtered outputs are calculated simultaneously,
one in each compute block, with a summation of
the results at the end.
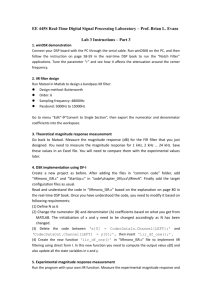
The 2-element state is stored in register yR5, and
during every iteration each newly computed w[i]
is inserted into the state register, which is then
shifted left. The delay line is duplicated so that
the computation of the 4 multiplications on the
feedback and feedforward paths can be
performed
with
one
4-way
16x16-bit
multiplication instruction as shown in Figure 2.
47
63
31
15
D1
D2
D1
*
*
*
*
b1
a2
Interface
The C style prototype for the filter in the
example implementation is noted in Listing 1.
void iir_16(int2x16 input[],
int output[],
int input_len,
iir_state_t *f_state)
0
D2
b2
Because the SDAB (Short Word Data Alignment
Buffer) is used, eight 16-bit input words are
loaded per iteration where only the first one is
used. Memory bandwidth is not the bottleneck,
so this seemingly wasteful treatment of the
fetched words is appropriate.
a1
Listing 1. IIR function prototype
The typedef “iir_state_t” is a structure that holds
coefficients, delay line and the input scaling
factor. The structure definition is listed in Listing
2.
Dx denotes Delay line element X.
Figure 2. Multiplication of delay line and coefficients
The partial results are collected with the
sideways summation instructions. If the
coefficients are mixed fraction and integers, the
4-way multiplication must be divided into two
separate multiplications, which will impair
efficiency.
typedef struct
{
const int2x16 c;
/* coefficients */
int2x16 d; /* start of delay line */
int2x16 s; /* Input value scaling */
} iir_state_t;
Listing 2. Filter state structure
A 16-bit IIR Filter on the ADSP-TS20x TigerSHARC® Processor (EE-215)
Page 2 of 4
a
Appendix
In this appendix the assembly source code for the example file is presented.
IIR_16.asm
/* ********************************************************************************
*
•
Copyright © 2003 Analog Devices Inc. All rights reserved.
*
* *******************************************************************************/
.section program;
.global _iir_16;
// Local defines
#define Arg0 j4
#define Yout j5
#define Arg2 j6
#define s_p j7
#define Xin j0
#define Xin_tmp j1
#define s_d j2
#define
#define
#define
#define
#define
c_offs 0
d_offs 1
k_offs 2
s_offs 3
coeff_p j10
_iir_16:
//PROLOGUE
J26 = J27 - 64;
K26 = K27 - 64;;
[J27 += -28] = CJMP; K27 = K27 - 20;;
Q[J27 + 24] = XR27:24;
Q[K27 + 16] = YR27:24;;
Q[J27 + 20] = XR31:28;
Q[K27 + 12] = YR31:28;;
Q[J27 + 16] = J19:16;
Q[K27 + 8 ] = K19:16;;
Q[J27 + 12] = J23:20;
Q[K27 + 4 ] = K23:20;;
//PROLOGUE ENDS
coeff_p = [s_p + c_offs];;
yR24 = [s_p + s_offs]; yR25 = R25 XOR R25;; // Get scale factor
yR21:20 = l[coeff_p += 2];; // Load ai’s and bi’s
Xin = Arg0 + j31;;
Xin = Xin + Xin; LC0 = Arg2;; // Double it to access shorts; Get # of input samples
yR31 = 0x0010;;
// used for FDEP with length=16, position=0
s_d = [s_p + d_offs]; yR4 = R4 XOR R4;;
yR5 = [s_d += j31];;
// Load delay line
jl0 = jl0 – jl0;;
// Avoid unintended circular buffer
Xin_tmp = Xin;;
yR3:0 = sDAB q[Xin += 8];;
yR4 = R4 OR R5;;
// Replicate the two 16-bit states
yR3:0 = sDAB q[Xin += 8];;
Xin_tmp = Xin_tmp + 1; yR11:10 = R5:4 * R21:20;;// Do a1*D1, a2*D2, b1*D1, b2*D2
// and store in R10:11
Xin = Xin_tmp + j31; yR1:0 = R1:0 * R25:24;; // scale
A 16-bit IIR Filter on the ADSP-TS20x TigerSHARC® Processor (EE-215)
Page 3 of 4
a
yR15 = SUM sR10;;
yR29:28 = EXPAND sR0(I);;
yR16 = SUM sR11;;
yR15 = R28 + R15;;
//
//
//
//
get a1*D1 + a2*D2
LSS(R0) -> R28
b1*D1 + b2*D2
w[i] = x[i] + a1*D1 + a2*D2
.align_code 4;
loop_:
yR5 = LSHIFT R5 by 16; yR4 = R4 XOR R4;;
// Shift out oldest element in delay
// line
yR3:0 = sDAB q[Xin += 8]; yR5 += FDEP R15 by R31;;
// Get x[i+1] and store the
// new w[i] in delay line
yR3:0 = sDAB q[Xin += 8]; yR17 = R16 + R15;;
// y[i] = w[i] + b1*D1 + b2*D2
Xin_tmp = Xin_tmp + 1; yR4 = R4 OR R5;;
yR1:0 = R1:0 * R25:24;;
// Scale i/p
Xin = Xin_tmp + j31; yR11:10 = R5:4 * R21:20;; // Do a1*D1, a2*D2, b1*D1, b2*D2 and
// store in R10:11
yR29:28 = EXPAND sR0(I);;
// LSS(R0) -> R28
yR15 = SUM sR10;;
// get a1*D1 + a2*D2
yR16 = SUM sR11;;
// b1*D1 + b2*D2
if NLC0E, jump loop_; yR15 = R28 + R15; [Yout += 1] = yR17;; // w[i+1] = x[i+1] +
// a1*D1 + a2*D2
// EPILOGUE STARTS
CJMP = [J26 + 64];;
YR27:24 = q[K27 + 16];
XR27:24 = q[J27 + 24];;
YR31:28 = q[K27 + 12];
XR31:28 = q[J27 + 20];;
K19:16 = q[K27 + 8 ];
J19:16 = q[J27 + 16];;
K23:20 = q[K27 + 4 ];
J23:20 = q[J27 + 12];;
CJMP (ABS); J27:24=q[J26+68]; K27:24=q[K26+68]; nop;;
// EPILOGUE ENDS
_iir_16.end:
Listing 3. Source file iir_16.asm
Document History
Version
Description
November 06, 2003 by R. Fahlqvist
First version
A 16-bit IIR Filter on the ADSP-TS20x TigerSHARC® Processor (EE-215)
Page 4 of 4