OF SEA SURFACE WAVES
advertisement

OF
LIDAR
SEA
SURFACE
WAVES
K.I.Voliak and M.V.Soln~sev
General
cs Ins~i~u~e o~ ~he USSR Ac. Sci.
38 Vavilov s~. ~ 117942 Moscow. USSR. Commdssion VII
ABSTRACT.
A lidar me~hod is developed ~o measure ~he sea wave
and o~her sea charac~eris~ics by using a
narrow
ampli~ude-modula~ed
beam.
Some ~echniques are sugges~ed ~or
de~ermining
~he
slope and
curva~ure
variance from
a
backsca~~ered (re~lec~ed) power. The model field experimen~
was
carried ou~ a~ an oceanographic pla~form. The experimen~al da~a
demons~ra~e ~ha~ ~he in~roduced me~hod is highly e~fec~ive.
spec~rum
1. INTRODUCTION. To
spa~ial-~ime s~ruc~ures o~ sea waves is
various scien~ific and applied problems
arising in ~he field of oceanic physics. Remo~e sensing me~hods
seem ~o be very appropria~e for ~his purpose. The mos~ highly
developed ~echnique of oceanic remo~e sensing is associa~ed wi~h
~he use of air-space imaging radars. Now in radiooceanography ~he
so-called syn~he~ic aper~ure radars [1J 9 recording the coheren~
backscat~er from ~he sea. or ~he noncoheren~ side-looking radars
r2] enjoy grea~ favor.
~or
solu~ion
s~udy
o~
Since ~he early 1970s laser me~hods of sea probing have been
also developing. They are superior ~o radiooceanography in
several
. Firs~. lidars can provide higher spa~ial-~ime
resolu~ion. which is sui~able for
measuring small-scale waves.
For ins~ancet a sharp-focused laser beam permi~s us to measure
waves of a horizon~al scale up ~o 1 mm. while the microwave
radar resolu~ion is limi~ed jus~ to several me~ers. The duration
-7
-9
of a radar pulse is typically ~rom
10
~o
10 s [3];
accordingly. ~he
al resolu~ion is 0.16~16 mL In the op~ical
range one can produce pulses as shor~ as 6.10 -~~s [4]
enabling
a resolu~ion of 0.08 rom ~o be ob~ained. We observe ~he principal
difference be~ween radar and lidar probings in ~he reflection of
signals by ~he sea. The radar wave leng~h exceeds often ~hose of
~he capillary waves. and. therefore. various diffraction effec~s
are of impor~ance here.
Meanwhile the laser wave length is
considerably shor~er ~han any surface one, and the mechanism of
laser reflec~ion is reasonably explained in terms of geometric
optics. This
ves rise ~o much Simpler relations between
the sta~istics of the lidar re~urn and ~hat of the sea surface,
compared to radars. One of the important parameters of the lidar
return is its average power. As shown theore~ically [6]. [6l,
lidar measurement of an average backscattered power at differen~
incidence angles establishes variances ~x and ~y of ~he downwind
and crosswind componen~s of the surface slope.
?resen~ly there are two principal ways of oceanic
lidar remo~e
sensing, namely, pulse ranging and phase profilometry. The
former
[7] involves de~erm1nation of the time delay between
sounding and reflec~ed pulses as well as analysis of their
shapes and durations. Depending on the experimen~al facilities
and position (for example~ on the beam divergence and vertical
or slan~ incidence),we can es~ima~e the significan~ wave height,
the slope probability densi
or measure roughly the sea
surf'ace profile. Laser measurement. of' t.he profile can be also
carried out. wi t.h airborne phase al t.imet.ers. Continuous f'light
alt.it.ude measurements permit. reconstruction of the sur~ace
prof'ile along t.he f'light ground line [8J.
An
anal y.zi s
of t.he
state of' the art. in these methods [9]
reveals t.hat t.he t.wo techniques are eff'ectively applicable to
investigation of' sea waves as long as 10m and more. But in many
field experiments i t is important to study both large-scale and
comparatively short waves. A good example of' t.his situation is
the
interaction
between
internal
and
surf'ace waves. where
most changes are observed
iust
in
the short surf'ace wave
spectrum.Futher development. of laser investigations of' cm and dm
sea waves requires a f'iner spatial resolution: In the f'ield of
pulse ranging one can decrease the sounding pulse duration. The
use of' subnanosecond laser techniques calls
f'or f'aster and,
hence, more sophisticated receivers.
2. NARROW-BEAM LIOAR RETURN FROM THE SEA SURFACE.
Let a laser
beam of' an intensit.y I(r.e), where r is t.he distance f'rom the
beam axis and e is the azimuthal angle. be normally incident
upon the sea surf'ace. In the horizontal plane at above-surf'ace
elevation H. there is placed a receiving aperture 0 (Fig.l). The
distance between the axes of' the beam and the aperture equals 1.
The characteristic diameter of a sounding beam is equal to d.
Then introduce the coordinat.es (x,y.z) with their origin at ·the
receiver axis. The coordinat.es x.y lie in the horizontal plane
of an undisturbed surf'ace. and z is directed upwards. Any point
of' the surface is def'ined by it.s elevation ~(XtY) and the slope
vector
(1)
The momenta of' t.he direct.ional surf'ace spectrum E(k tk ) can
wri tten in t.he form :
j. :.2
m..
=
l.J
~
f'JrE'
(k
t k )
k i. k j dk dk
j.:.2
j.:.2
j. 2 • i
11/
j =0. 1 • 2. . . •
(
be
2.)
'-OQ
where k=(k j. .k2 ) is the wavevector of' surf'ace random disturbance.
To evalute t.he stat.istics of the ret.urn. it. is necessary to
assume the f'ollowing:
(i) the surf'ace slopes are obviously
gentle, m m « 1 ;
(ii) t.he
al t.i tude is great,
H»<{2>j./2;
20
02
(iii)t.he sea ret.urn is homogeneous wit.hin t.he beam spot.
d/H «m ,11m ;
(iv)
the transmitt.er
and t.he receiver are
20
02
nearly coaxial. l/H « m 20 m oi (v) t.he beam is narrow. nS « 1,
where n is the densit.y of specular point,s at surf'ace slopes
~ = ~ = 0, and
S st.ands f'or
the
spot.square; and
(vi) -j./2
t.he
x
y
.
surf'ace is illuminated f'rom the 'far' range, D<IRI>/H« n
~
wher e < IR I> is t.he a vel" age modul us of' the r adi us of sur f' ace
curvat.ure. Under all t.hese conditions the lidar return f'rom the
sea surf'ace is provided by the specular points within t.he lidar
spot. The power returned from a single specular point is
I)
P s= O. 0826n Inl
Here
~ ~
-j.
2
(O/H) p J(r .e).
0.02 is the sea ref'lectivity at the
VIl . . 69
(3)
normal
incidence.
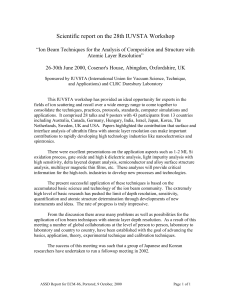
Fig.'
Horizontal cross-section of the probing geometry.
f(t)
--f((t)
I
J
J
'1
J
I
J
J
J
I
I
1
!
I
J
I
J
~l~~l~l~~l~J~__~l~l~~(~~
Fig.2 Discretization of the process
pulse sequence 11(1:).
VU-70
fff)
by
a random
n
is
'lhe 'lotal curvature
normalize the point ret.urn as
at.
t.he
specul ar
poi nt. Let
us
1,
i~
t.he specular point. is placed inside t.he beam spot.
O.
i~
it is outside the spot.
Assuming
that
t.he sea
sur~ace is a
random GaUSSian ~ield.
one can obtain some st.at.ist.ical quantities: the average power
(P
s
>
== 0(/6
(4)
t.he power variance
(6)
and t.he average normalized ret.urn
(eo
2
-2
~/2
Here a= 0 0826n~ H Po ~ , Po 2 i s t.he radi at.ed power, 0= 2nA2 •
and A~ = (f3)( f3y ) == m2f) m02 - m4f is t.he sur~ ace i nvar i ant
whi ch
depends on
t.he wave st.eepness and divergence.
It
It
2
Thus, t.he measurement.s o~ <PS > <Ps > (Ps >
make
~easible t.o
det.ermine the sea cross-sect.ion a, t.he invariant.
A. and t.he
mean moduli o~ t.he curvat.ure and o~ its reciprocal: 2
It
0
It
(7) . ( 8 ) .
respect.i vely.
3. PHASE PROFILOMETRY WITH A NARROW BEAM. In t.he case o~ phase
pro~ilomet.ry. t.he
laser beam is amplit.ude-modulat.ed with some
~requency ~ . The return is ~ormed
by specular points ment.ioned
o
above. To monitor t.he pro~ile continuously, the lidar sur~ace
spot should be widened. thereby degenerating spat.ial resolut.ion
and averaging sur~ace elevat.ion over t.he spot..
Oceanographers
are primarily concerned in t.he sea spectrum or ot.her st.atist.ical
quant.it.ies rather t.han in isolated sea elevat.ion records. The
problem iS t
there~ore.
to reconst.ruct. t.he stat.istics o~ an
unknown random sea ~rom an
experimental
discret.e sample
corresponding t.o t.he specular points.
Let. ~(t.) be a st.ationary random ~unction o~ the surface
elevat.ion in t.ime (or in space).
The discretizat.ion o~ ~(t)
(cf. Fig.2) by a random sequence yCt.) produces a new random
VII-71
P2
AM
He .... Ne
LJ
40 MHz
d'L4
Detector of
envelope and
phase
A(c)
I
~(6)
Tape recoder
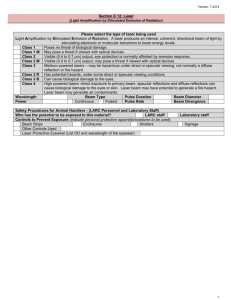
Fig.) Experimental set-up.
IF
PM
nC t.) . If nCt.) is of t.he Poisson dist.ribut.ion wit.h
(w) of
t.)
period
t.he
on
((..»
~(t.) as [10] :
1
e"i)
::::::
(.&»)
1 +(.&)2.
].
::::
(11)
n
0
It.
is
evident from (11) t.hat
t.he discret.izat.ion
a
pul se
Poi sson
sequence
is
on of a hi
filt.er of a cut.-off
which is connect.ed in
leI wit.h t.he source of
of t.he spectrum S .
For
an
init.ially limited sea
where
(.&) > wm ' we reconst.ruct.
(w)
t.he followi
(i)
eval uat.ed at.
2 2W" ') Wm ;
i) t.he I whi t.e
noi se
So ::::::
( ( 1 + W<t 10 2) 2is
found; and Ciii)t.he i ni t.ial
S ... Cw)::::
(,,»(1+ W T,,)- S is reconst.ruct.ed. When probing
carried out. from a st.able
we
that. t.he sea
ar glitt.er is described rather
t.he Poisson
st.at.istics. t.hat. allows us t.o
y t.he
al
t.hm for
reconst.ruct.ing t.he sea
um.
Il
4. EXPERIMENTAL SYSTEM AND SITE. To
t.he st.at.ist.ics of t.he
laser ret.urn from t.he sea surface. we have desi
a lidar
shown schemat.ically in Fig. 3. The source was a 16mw CW He-Ne red
C633nm) laser LG-79/1. The sounding beam was
it.ude-modulat.ed
by an elect.roopt.ical modulat.or.The modulat.ion
(40 MHz)
corresponded t.o t.he 2n-uncert.ai
range of 3.7Sm. The modulat.ed
beam was focused
a
of lenses. L1 IIL2
and direct.ed
vert.ically downwards t.hr
sms. P1 P2, and an
mirror. M1 .
II
1l
The ret.urn reflect.ed
t.he
sea
surface and
t.ransmi tt.ed
through mirrors. M1.M2", was focused
a lens, L3, ont.o a
diaphragm. d1.inserted in t.he image plane t.o limit.. for t.he sake
of bet.t.er sensi vi
the recei ver field of si
The i
apert.ure,
was defined
t.he L3 diamet.er of 4.7cm, while the
d1 diaphragm diamet.er was from 0.04 t.o 0.3mm. So the l"'ecei vel"
visual angle was 10·, i.e. t.he linear dimension of the sea site
visible t.hr
t.he di
agm was from 0.7 to Scm. The ret.urn
beam cut-off
t.he field di
was made t.o pass t.hr
a
collimat.or ~ L4. and an int.erference fil ter
IF t t.hen it was
regist.ered by a phot.omult.i ier, PM. The radi
ses of
40 MHz from the PM
were fed to a det.ect.or of envelope and
phase. The analog envelope and phase si
s from t.he detect.or
were recorded by a Bruel and Kjaer 7006 tape recorder. The
signals were also processed using a DrSA 66 N11
mean-value
met.er,a Br
and Kjaer 7006
analyzer. and a CLANP 0270
computer.
II
The lidar
ments were conduct.ed during
1987 at.
an oceanographic plat.form locat.ed in t.he Black Sea SO Om off the
Crimea coast.. Under various
ometeorol
cal. condi t.ions. we
carried out. 70 series of 20-minute measurements.
The distance
1-
ox ItJ i) $r-1
f6.2)'/JX fD2
Of
2
Bufton et.al.
1983
6' Krishnan
1
IQ
4
01 0
().,Lj
A
j
o JJ..
3
0
r D~"
o
06 A
IJ.
A
00
0.2
2
0
00 0
Q
A
A
0
A
1
2
Fig.4
f)
C£ x (0-1
)
8
It
~m;s
Lt·
.2
0
10
8
6
0/.1Fig.5 ~2) versus
versus W"
1954
c
R,cm
cm- J
AI.
A
Burtsev,Pelevin 1980
A
A
20
3
AAJ)I:>AO
1
1
A
0
A
0
A
0
0
.0
Z
1
A
0
~ Cox,Munk
tv,~
fO
A
0
1
0
0.1
1973
5
as
A 0
Y
0~
A
b.
o
A
0
1l.
0
2
0"
,
0
2
Lf
0
6
11
Iv) nyS
.A
(10
) .s
1
(0
Fig.6 ;;e versus ltV.
wm~.,
~
Ja& If
d= (5
od=sO
2
Fig.7
VU ... 74
l.;
R versus
8 10
w.
S) H:r
0!2.
2
S
cm2.
) I-/:l-
l03
:2
/0 --
fOol.
~
~
<
......
--"II
I
\./'\
\...."
1j
...,
•..• "
~.....
(()~
'III
01
••..-
,'4
•
IO"f~
\\
~~
"iJ"l
.....
-,"1·. . .·"
...,
.....
e.
1
'-2
1'0
10-/
0.25
a5
i.O
-----.....
fl fie
0.2.5
Fig.8 Examples of the speotrum reconstruction.
as
10
f,H-c
receiving ~elescope and ~he sea was 16m. Some of ~he
series were accompanied by in si~u measurements
with a standard wire waverecorder.
be~ween ~he
experimen~al
6.
DATA ANALYZIS
DISCUSSION. After processing the
re~urn
2
envelope in accordance with (7)-(10), we evaluated o,~~= (~v~v)t
i ./ 2
I
i/2
"
""
x =<101>
~
and R =< 01>
t
then analyzed their dependence on
the wind velocity. w.
Spec~ral
processing of the phase signal
and i~s correction Cl1) allowed us to determine the sea spectra
under various winds.
The results were checked
partly by
wire waverecords and compared to ~he data repor~ed elsewhere.
The sea cross-sec~ion versus the wind velocity for different
sounding
is
otted in Fig. 4. The value of 0 for vertical
incidence falls
dly with the wind str
and i~ varies
from 0.6 to 0.01 t when W
from 1 ~o 12 nVs.
For
son, we show here ~he data [6] obtained with an airborne
green (6:30 nm)
se Nd: YAG lidar.
Assuming ~he Gaussian sea statistics. we can readily evaluate
the product ~;( ~y of slope variances from o. Fiil;26 sket.ches ~he
relationship be~ween ~ fi and W. as well as A
CW) t which is
derived from
semiempfrrcal [111 relations f:CW) t /12.CW) and
evaluated from a model [12l spectrum. As seen, out da~aYare in a
satisfactory agreement wi~h the results ci~ed. Figs.e,7 show the
experimental graphs xCw) and RCw), respectively.Fig.e also gives
the semiempirical [13] relationship xCw). The errors presen~ in
Figs. 4 through 7 are related to the imperfect lidar graduation.
The variations in experimental data may be partly attributed to
several uncontrollable
,i.e.
to duration and length of
wind fetch. wind turbidity. di
ng temperatures of the air and
sea. etc. Notice also that. at the widest sounding
of 6 cm
dia. correct measurements of x and Rare
ble only under
rather slight C W < 4nVs ) winds because under stronger winds
the specular point densi
increases sharply and the condition
(v) of narrow spot C
.2) is no longer fulfilled. Figs. Ba.b
exemplify different sea spectra. where we demonstrate: (i) the
spectrum of an initial phase signal;" Cii) the phase spectrum
corrected in accordance with Cl1); and (ii) the waver ecor der
surface elevation spectra;
vely.A comparison of all the
spectra exhibits
coincidence
the rough lidar and
recorder data up to
of 1.26 Hz. After correction the
upper limit of the coincidence shifts to around 2.6 Hz.
Thus.
the suggested method enables a noticeable progress to
be made in lidar remote measurements of the high-frequency sea
waves
and of the slope variance and the curvature of a
disturbed sea.
REFERENCES
1. Vesecky J.F. and Stewart R.M.The observation of ocean surface
phenomena. using imagery from the SEASAT synthetic aper~ure
radar: An assessmen~. J. Geophys.Res.C87 t 3397-3430 t 1982.
2. Alpers W.R .• Ross D.B. and Rufenach C.L. On the detectability
1-
ocean sur~ace waves by real and
J.Geophys. Res. Q§§, 6481-6498. 1981.
o~
syn~he~ic
radar.
aper~ure
3. Skoinik M. ,Ed. Radar Handbook. McGraw-Hill, N.Y., 1970.
4. Prokhorov A.M. ,Ed. Laser Handbook. Sovradio, Moscow, 1978.
6.
J.L., Hoge F.E. and Swi~~ R.N.
laser backsca~~er ~rom ~he ocean
2603-2618, 1983.
Bu~~on
o~
6.
Airborne
sur~ace.
measuremen~s
Appl.
Barrick D.E. Rela~ionship be~ween slope probabili~y
and ~he physical
op~ics in~egral in rough
sca~~ering. Proc.IEEE 66, 1728-1729, 1968.
~unc~ion
7. Tsai B.M. and Gardner C.S. Remo~e sensing o~ sea
laser al~ime~ers. Appl. Op~. 21~ 3932-3940.
8.
Op~.
22,
densi~y
sur~ace
s~a~e
using
Chen D. T. and Har~ W. D. On ~he use o~ laser
J.Geophys.Res.C87,
ocean wave s~udies.
9509-9516. 1982.
McClain C. R..
profilome~ry
~or
9. Bunkin F.V. ~ Voliak K.I., Malyarovskiy,A.I..
Mikhalevich
V. G.,
Soln~sev
M. V.,
Shevchenko T. B.
and Shugan I. V.
Measuring sea waves by re~lec~ed laser emission s~a~ist.ics.
In: Oceanic Remo~e Sensing. Nova Sci. N.Y. D 3-22. 1987.
10.
Boyer
L.
and
recons~ruc~ion
Scarby
o~
G.
Random
veloci~y
sampling:
spec~ra
~rom
t.rans~orm
analysis o~ ~he analog Signal o~
processor. J. Appl. Phys. 60. 2699-2707, 1986.
and
Fouriera laser Doppler
Dis~or~ion
fas~
11. Cox C.S. and Munk W.H. S~a~is~ics o~ ~he sea sur~ace derived
~rom sun gli~~er. J.Marine Res. 13. 198-227. 1954.
12.
Krishan K.S. and Peppers N.A. Sca~~ering o~ Laser Radia~ion
~rom ~he Ocean Sur~ace.
S~an~ord Reseach Ins~.» Menlo Park t
Cali~ .• Final Rep. ONR Con~rac~ N0014-73-c-0446. ,1973.
13.
Bur~sev Ju. S.
and Pelevin V.
~ace~s of waving sea sur~ace
Fields in ~he Ocean
t
N. Dis~ribu~ion o~ reflecting
on ~heir curva~ure. In: Ligh~
lOAN, Moscow. 231-232. 1980.
VII