ETNA
advertisement

ETNA
Electronic Transactions on Numerical Analysis.
Volume 41, pp. 109-132, 2014.
Copyright 2014, Kent State University.
ISSN 1068-9613.
Kent State University
http://etna.math.kent.edu
ERROR ESTIMATES FOR A TWO-DIMENSIONAL SPECIAL FINITE ELEMENT
METHOD BASED ON COMPONENT MODE SYNTHESIS∗
ULRICH HETMANIUK† AND AXEL KLAWONN‡
Abstract. This paper presents a priori error estimates for a special finite element discretization based on component mode synthesis. The basis functions exploit an orthogonal decomposition of the trial subspace to minimize the
energy and are expressed in terms of local eigenproblems. The a priori error bounds state the explicit dependency
of constants with respect to the mesh size and the first neglected eigenvalues. A residual-based a posteriori error
indicator is derived. Numerical experiments on academic problems illustrate the sharpness of these bounds.
Key words. domain decomposition, finite elements, eigendecomposition, a posteriori error estimation
AMS subject classifications. 35J20, 65F15, 65N25, 65N30, 65N55
1. Introduction. Classical Lagrangian finite element methods are challenged by problems
(1.1)
−∇ · (A(x)∇u(x)) = f (x)
u=0
in Ω,
on ∂Ω,
where the coefficient matrix A is rough or highly oscillating so that a standard application
of the finite element method needs a highly refined mesh to reach sufficient accuracy. Over
the last couple of years, many discretization methods have been proposed to enable the accurate, efficient, and robust solution of these complex problems. Approximation subspaces
that incorporate specialized knowledge of the coefficient matrix A give rise to effective finite element methods. Examples include the multiscale finite element [15, 21], the mixed
multiscale finite element [1], the heterogeneous multiscale finite element [14], adaptive multiscale methods [28], and the generalized finite element method [3, 4, 6]. Babuška, Caloz,
and Osborn [5, p. 947] denote such finite element methods special.
Hetmaniuk and Lehoucq [20] proposed to build a conforming approximation space by
local eigenfunctions for the partial differential operator in (1.1). Eigenbases are often efficient
in terms of Kolmogorov n-width (see Melenk [26]), and local eigenfunctions are supposed to
span a good approximation space. The discretization in [20] is based upon the classic idea
of component mode synthesis (CMS), introduced in [13, 23] and used, e.g., by Gervasio et
al. [16] in the spectral projection decomposition method. Starting from a partition of the domain Ω, component mode synthesis methods exploit an orthogonal decomposition of H01 (Ω)
to solve the minimization problem
Z
Z
1
T
f (x)v(x) dx .
(∇v(x)) A(x)∇v(x) dx −
(1.2)
argmin
Ω
v∈H01 (Ω) 2 Ω
For two-dimensional problems, the conforming approximation space proposed in [20] combines bubble eigenfunctions (localized inside one element), energy-minimizing extensions
of vertex-specific trace functions (localized on the elements sharing the vertex), and energyminimizing extensions of edge-bubble eigenfunctions (localized on an edge and the adjacent elements). Numerical experiments in [20, 24] illustrate the efficacy of this CMS-based
∗ Received August 17, 2013. Accepted March 28, 2014. Published online on June 20, 2014. Recommended by
Y. Achdou. The work is partly supported by NSF grant DMS-0914876.
† Department of Applied Mathematics, University of Washington, Box 353925, Seattle, WA 98195
(hetmaniu@uw.edu).
‡ Mathematisches Institut, Universität zu Köln, Weyertal 86-90, 50931 Köln, Germany
(klawonn@math.uni-koeln.de).
109
ETNA
Kent State University
http://etna.math.kent.edu
110
U. HETMANIUK AND A. KLAWONN
approach. The first goal of this paper is to present a priori error estimates for this local
eigenfunction-based discretization. The error bounds state the explicit dependency of constants with respect to the mesh size and the first neglected eigenvalues.
Special finite element methods allow great flexibility in their definition. These numerical
methods often contain a parameter, such as the vertex-specific trace function or the number of
eigenfunctions, motivated by heuristics arguments. An efficient choice of parameter(s) may
not be known in advance and could be estimated adaptively during the computations. The
second objective of this paper is to derive an a posteriori error indicator that could guide the
selection of the number of bubble eigenfunctions and edge-bubble eigenfunctions.
The rest of the paper is organized as follows. Section 2 reviews notations and the local
eigenfunction-based discretization. Section 3 presents a priori error estimates and a residualbased a posteriori error indicator. Finally, numerical experiments illustrate the sharpness of
these bounds.
2. Review of a special finite element method based on component mode synthesis.
Let Ω be a bounded polygonal domain in the plane R2 whose boundary ∂Ω is composed of
straight lines. On this domain, the Sobolev spaces H k (Ω) and H0k (Ω) are defined in a standard way (with k > 0). Fractional order Sobolev spaces H s (Ω) are defined by interpolation.
Denote
Z
T
a(u, v) =
(∇u(x)) A(x)∇v(x)dx
∀u, v ∈ H01 (Ω),
Ω
the bilinear form induced by (1.1). The coefficient matrix A is assumed to be symmetric
positive definite, to be C 1 on Ω, and to satisfy
(2.1)
0 < αmin ξ T ξ ≤ ξ T A (x) ξ ≤ αmax ξ T ξ
∀x ∈ Ω and ξ ∈ R2 \ {0} .
Given f ∈ L2 (Ω), the problem (1.2) is rewritten as
1
argmin
a(v, v) − (f, v) ,
v∈H01 (Ω) 2
where (·, ·) denotes the standard inner product on L2 (Ω). The associated optimality system
is the variational formulation of (1.1): find u ∈ H01 (Ω) such that
(2.2)
a(u, v) = (f, v)
∀v ∈ H01 (Ω).
We refer to the solutions of (1.1), (1.2), and (2.2) as equivalent in a formal sense. Throughout
the paper, the regularity assumption is:
A SSUMPTION 1. Given f ∈ L2 (Ω), there exists s0 > 23 such that the solution u belongs
to H s0 (Ω) ∩ H01 (Ω).
This regularity assumption implies some conditions for the domain Ω. For example, when Ω
is convex, Assumption 1 holds with s0 = 2; see Grisvard [17, Theorem 3.2.1.2].
Consider a family (Th )h of conforming partitions of Ω into a finite number of triangles
or convex quadrilaterals with straight edges. The mesh size h is the maximal diameter of
the elements K in Th . Here every element K is assumed to be a non-empty bounded open
set. The family (Th )h is assumed to be shape regular, i.e., the ratio of the diameter of any
element K in Th to the diameter of its largest inscribed ball is bounded by a constant σ
independent of K and of Th . The interface Γ is defined as
!
[
∂K \∂Ω.
Γ=
K∈Th
ETNA
Kent State University
http://etna.math.kent.edu
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
111
Given two distinct elements K and K ′ in Th , the intersection K ∩ K ′ is empty, a vertex, or a
complete edge with two vertices.
Let VK be the subspace of local functions whose restrictions to K belong to H01 (K) and
which are trivially extended throughout Ω,
n
o
VK = v ∈ H01 (Ω) : v|K ∈ H01 (K) and v|Ω\K = 0 .
Any member function of VK has a zero trace on the boundary ∂Ω and on the interface Γ.
Let WΓ be the subspace of trace functions on Γ for all functions in H01 (Ω). Denote VΓ the
subspace of energy-minimizing extensions of trace functions on Γ,
VΓ = EΩ τ ∈ H01 (Ω) : τ ∈ WΓ ,
where the extension EΩ (τ ) solves the minimization problem
inf
v∈H01 (Ω)
a(v, v)
subject to v|Γ = τ.
The energy-minimizing extension EΩ (τ ) satisfies, in the weak sense,
(2.3)
−∇ · (A(x)∇EΩ τ (x)) = 0
EΩ τ = τ
in K, ∀K ∈ Th ,
on Γ,
EΩ τ = 0
on ∂Ω.
This property indicates that functions in VΓ are governed by the underlying partial differential
equation. Note that any non-zero member function of VΓ has a non-zero trace on Γ.
A key result is the orthogonal decomposition
!
M
1
VK ⊕ VΓ .
(2.4)
H0 (Ω) =
K∈Th
The decomposition (2.4) is orthogonal with respect to the inner product a(·, ·) because
a(v, w) = 0
a(v, vΓ ) = 0
∀v ∈ VK , ∀w ∈ VK ′ , (K 6= K ′ ),
∀v ∈ VK , ∀vΓ ∈ VΓ .
The former equality follows because the supports of the two functions v and w are disjoint.
The latter equality follows by definition of the extension (2.3). Although not often stated in
this form, result (2.4) is at the heart of the analysis and development of domain decomposition
methods for elliptic partial differential equations [16, 29, 31] and modern component mode
synthesis methods [7, 10].
An approximating subspace consistent with the decomposition (2.4) arises from selecting
basis functions in the subspaces VK and VΓ . To build this approximating subspace, we introduce two different sets of eigenvalue problems. First, we define fixed-interface eigenvalue
problems: find (z∗,K , λ∗,K ) ∈ VK × R such that
a(z∗,K , v) = λ∗,K (z∗,K , v)
∀v ∈ VK .
Next, for any open edge e ⊂ Γ, the edge-based coupling eigenvalue problem is: find
1
2
(e) × R such that
(τ∗,e , λ∗,e ) ∈ H00
Z
1
2
(e),
a (EΩ (τ̃∗,e ) , EΩ (η̃)) = λ∗,e τ∗,e ηde ∀η ∈ H00
e
ETNA
Kent State University
http://etna.math.kent.edu
112
U. HETMANIUK AND A. KLAWONN
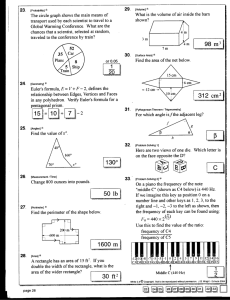
F IG . 2.1. Example of an edge-bubble eigenfunction along an interior edge e.
F IG . 2.2. Trace of ϕP along Γ for a domain partitioned into 16 elements.
∞
where η̃ denotes the trivial extension of η by 0 on Γ. The eigenvalues {λi,K }∞
i=1 and {λi,e }i=1
are assumed to be ordered into nondecreasing sequences. The eigenmodes z∗,K and τ∗,e form
orthonormal bases for the L2 -inner product on the element K and the edge e, respectively.
Figure 2.1 illustrates an example for an eigenfunction τe .
To complete the approximating subspace, each vertex-specific function ϕP is defined as
the harmonic extension satisfying
−∇ · (A(x)∇ϕP (x)) = 0
ϕP = 0
ϕP 6= 0
ϕP (P ′ ) = δP,P ′ ,
in K,
on ∂Ω,
on Γ,
for any element K, where δP,P ′ is the Kronecker delta function. Here ϕP is chosen to
be linear on each edge e1 . On Γ, the trace for ϕP has local support along the boundaries
of elements sharing the vertex P . The resulting function ϕP will also have as support the
elements sharing the point P . Figure 2.2 illustrates an example of the trace of ϕP .
1 Efendiev
and Hou [15] discuss other choices for ϕP .
ETNA
Kent State University
http://etna.math.kent.edu
113
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
The conforming discretization space VACMS , proposed in [20], is consistent with the orthogonal decomposition (2.4) and is defined as follows:
VACMS =
M
K∈Th
!
span {zi,K ; 1 ≤ i < IK }
⊕
"
M
P ∈Ω
!
span {ϕP }
M
⊕
e⊂Γ
!#
span {EΩ (τ̃i,e ) ; 1 ≤ i < Ie }
,
where IK and Ie are positive integers2 . The letter A in ACMS stands for approximate. Note
that the vertices P and the edges e are taken in the interior of Ω. The basis functions have
local support and the homogeneous Dirichlet boundary condition is built into VACMS .
In summary, the conforming finite-dimensional subspace VACMS ⊂ H01 (Ω) exploits the
orthogonal decomposition (2.4) for incorporating information from the variational form a(·, ·).
The subspace VACMS contains information within elements via the bubble eigenfunctions. The
functions ϕP and EΩ (τ̃i,e ) carry information among several and two elements, respectively.
3. Error estimates. The goal of this section is to derive error estimates for the difference of the exact solution u of (2.2) and the approximate solution uACMS ∈ VACMS defined by
a (uACMS , v) = (f, v)
(3.1)
∀v ∈ VACMS .
The orthogonal decomposition (2.4) implies that
(3.2)
a (u − uACMS , u − uACMS ) = a (uB − uACMS,B , uB − uACMS,B )
+ a (uΓ − uACMS,Γ , uΓ − uACMS,Γ ) ,
where the solution u satisfies
u = uB + uΓ ,
uB ∈
M
K∈Th
VK
!
and uΓ ∈ VΓ ,
and the approximation uACMS ∈ VACMS is written as
uACMS = uACMS,B + uACMS,Γ ,
uACMS,B ∈
M
VK
K∈Th
!
and uACMS,Γ ∈ VΓ .
The two error terms in (3.2) are treated separately.
L EMMA 3.1. The components uB and uACMS,B satisfy
(3.3)
a (uB − uACMS,B , uB − uACMS,B ) ≤
X kf k2L2 (K)
K∈Th
λIK ,K
≤ Ch2
X kf k2L2 (K)
K∈Th
αmin,K IK
,
where C is a constant and αmin,K verifies
(3.4)
2 When
0 < αmin,K ξ T ξ ≤ ξ T A (x) ξ
∀x ∈ K and ξ ∈ R2 \ {0} .
IK is 1, the subspace span zi,K ; 1 ≤ i < IK is equal to {0} (the same convention holds for Ie ).
ETNA
Kent State University
http://etna.math.kent.edu
114
U. HETMANIUK AND A. KLAWONN
Proof. By Galerkin orthogonality, the error satisfies
a (uB − uACMS,B , uB − uACMS,B ) ≤ a (uB − w, uB − w)
∀w ∈
M
K∈Th
!
span {zi,K ; 1 ≤ i < IK } .
For every element K, define the projection operator PIK as follows
2
PIK (v) =
∀v ∈ L (K) :
(3.5)
IX
K −1 Z
i=1
zi,K v zi,K .
K
Replacing w by PIK (uB ), the projection error for uB verifies
a (uB − PIK (uB ) , uB − PIK (uB ))
X Z
T
(∇uB − ∇PIK (uB )) A (∇uB − ∇PIK (uB )) .
=
K∈Th
K
+∞
On element K, properties of the family of eigenfunctions (zi,K )i=1 indicate that
Z
T
K
(∇uB − ∇PIK (uB )) A (∇uB − ∇PIK (uB )) =
+∞
X
λi,K
i=IK
Z
uB zi,K
K
2
.
For every eigenvector zi,K , we have
Z
Z
Z
1
1
T
uB zi,K =
(∇uB ) A∇zi,K =
(−∇ · (A∇uB )) zi,K
λi,K K
λi,K K
K
Z
1
=
f zi,K .
λi,K K
Hence, we get
Z
K
T
(∇uB − ∇PIK (uB )) A (∇uB − ∇PIK (uB ))
=
+∞
X
i=IK
1
λi,K
Z
f zi,K
K
2
2
≤
kf − PIK (f )kL2 (K)
λIK ,K
2
≤
kf kL2 (K)
λIK ,K
.
Thus, the projection error uB − PIK (uB ) satisfies
a (uB − PIK (uB ) , uB − PIK (uB )) =
X kf k2L2 (K)
K∈Th
λIK ,K
.
By (3.4), the eigenvalue λi,K is larger than αmin,K times the i-th eigenvalue of the Laplacian on K. By combining the bound of Bourquin on eigenvalues for the Laplacian [9, p. 74]
and the shape regularity of the family (Th )h , there exists a constant C independent of K and i
such that
(3.6)
This estimate concludes the proof.
λi,K ≥ Cαmin,K
i
.
h2
ETNA
Kent State University
http://etna.math.kent.edu
115
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
This result uses only the regularity assumption that −∇ · (A∇u) = f belongs to L2 (Ω).
When f is more regular, a sharper bound for the projection error exists. The lower bound (3.6)
is valid for all eigenvalues, while Weyl’s formula for eigenvalues is asymptotic; see Bourquin [10, Equation (95)].
Next, the error in VΓ is estimated.
L EMMA 3.2. The components uΓ and uACMS,Γ satisfy
(3.7)
a (uΓ − uACMS,Γ , uΓ − uACMS,Γ ) ≤ Cs0 ,σ,A h2s0 −3
when the solution u belongs to H s0 (Ω) ∩ H01 (Ω).
Proof. By Galerkin orthogonality, the error satisfies
X
K∈Th
2
kukH s0 (K)
mine⊂∂K∩Γ λIe ,e
a (uΓ − uACMS,Γ , uΓ − uACMS,Γ ) ≤ a (uΓ − w, uΓ − w)
,
∀w ∈ VΓ .
Recall that the function uΓ is equal to EΩ (u|Γ ). Using the same characterization for w yields
X Z
T
a (uΓ − w, uΓ − w) =
(∇EΩ (u|Γ − w|Γ )) A∇EΩ (u|Γ − w|Γ ).
K∈Th
K
1
2
(e) for every edge e ⊂ Γ, we have on K
When the restriction u|e − w|e belongs to H00
X
EΩ (u|Γ − w|Γ ) = EΩ (u|∂K − w|∂K ) =
EΩ u|^
e − w|e ,
e⊂∂K
where u|^
e − w|e is the trivial extension of (u − w)|e by 0 on Γ. This relation yields
a (uΓ − w, uΓ − w)
!
T
X
X Z
A
∇EΩ u|^
=
e − w|e
K∈Th
K
e⊂∂K
X
e⊂∂K
∇EΩ u|^
e − w|e
!
and
(3.8)
a (uΓ − w, uΓ − w)
T X X Z ,
A ∇EΩ u|^
∇EΩ u|^
≤C
e − w|e
e − w|e
K∈Th e⊂∂K
K
where the Cauchy-Schwarz inequality has been used. The support of u|^
e − w|e is included
in e. Its energy-minimizing extension has a local support in K e,1 ∪K e,2 , where Ke,1 and Ke,2
are the two elements whose boundaries share the edge e. Rearranging the terms in (3.8) gives
(3.9)
a (uΓ − w, uΓ − w)
XZ
≤C
e⊂Γ
Ke,1 ∪Ke,1
T .
A ∇EΩ u|^
∇EΩ u|^
e − w|e
e − w|e
To construct such a function w, we proceed as follows. Let Ih be the piecewise linear
interpolation operator on Γ and define the projection operator ΠIe , for each interior edge e,
as follows
IX
e −1 Z
∀η ∈ L2 (e) :
ΠIe (η) =
τi,e η τi,e .
i=1
e
ETNA
Kent State University
http://etna.math.kent.edu
116
U. HETMANIUK AND A. KLAWONN
We replace the function w by
w = EΩ
Ih (uΓ ) +
X
e⊂Γ
e I (uΓ − Ih (uΓ ))
Π
e
!
∈ VΓ ∩ VACMS ,
e I (η) is the extension by 0 of ΠI (η) on Γ. For this choice of w, we have
where Π
e
e
1
2
u|e − w|e ∈ H00
(e)
for every edge e ⊂ Γ.
Assumption 1 indicates that EΩ (u|Γ ) belongs to H s0 (Ω).
1
2
Hence, the restriction
1
u|e − Ih (u)|e is contained in H00 (e) ∩ H (e) for every edge e ⊂ Γ. The relations (3.9)
and (A.2) yield
(3.10)
a (uΓ − w, uΓ − w) ≤ Cs0 ,σ,A
X ku − Ih (u)k2H 1 (e)
.
λIe ,e
e⊂Γ
Properties of the interpolation operator Ih give
2
3
ku − Ih (u)kH 1 (e) ≤ Ch2(s0 − 2 ) |u|
2
1
H s0 − 2 (e)
2
1
H s0 − 2 (e)
3
≤ Ch2(s0 − 2 ) kuk
;
see Steinbach [30]. Relation (3.10) becomes
a (uΓ − w, uΓ − w) ≤ Cs0 ,σ,A h
2(s0 − 23 )
X
K∈Th
P
e⊂∂K
2
1
H s0 − 2 (e)
kuk
mine⊂∂K∩Γ λIe ,e
.
A theorem of Arnold et al. [2, Theorem 6.1] indicates that we have
X
2
2
kuk s0 − 21
≤ C kukH s0 (K)
H
(e)
e⊂∂K
because u is continuous on Ω and satisfies the conditions for traces on a polygon. Finally we
get
a (uΓ − w, uΓ − w) ≤ Cs0 ,σ,A h
2s0 −3
X
K∈Th
2
kukH s0 (K)
mine⊂∂K∩Γ λIe ,e
.
To the best of the authors’ knowledge, a lower bound on all the edge-bubble eigenvalues λ∗,e is not available. Based on the discussion in Bourquin [9, p. 89] and on egde-related
eigenvalues for particular geometries (see, for example, [10, p. 412]), one could expect that
(3.11)
λl,e ≥ Cαmin
l
,
h
where the constant C does not depend on e or l. The error (3.7) would become
(3.12)
a (uΓ − uACMS,Γ , uΓ − uACMS,Γ ) ≤ Cs0 ,σ,A
providing a rate of h2 when u belongs to H 2 (Ω).
2
h2s0 −2 X kukH s0 (K)
,
αmin
mine⊂∂K∩Γ Ie
K∈Th
ETNA
Kent State University
http://etna.math.kent.edu
117
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
R EMARK 3.3. The result in Lemma 3.2 does not exhibit an optimal behavior with respect
to the edge-based coupling eigenvalues when s0 > 23 . Indeed, bounds on the eigendecomposition do not take into account the smoothness of u|Γ beyond H 1 (Γ). Such analysis for the
Steklov-Poincaré operator seems difficult to establish.
Combining (3.2) and the previous two lemmas yields the error estimate for u.
P ROPOSITION 3.4. Assume that the solution u of (2.2) belongs to H01 (Ω) ∩ H s0 (Ω),
with s0 > 23 . Then the error between the solution u and the approximate solution
uACMS ∈ VACMS satisfies
a (u − uACMS , u − uACMS ) ≤
X kf k2L2 (K)
K∈Th
λIK ,K
+ Cs0 ,σ,A h
2s0 −3
X
K∈Th
2
kukH s0 (K)
mine⊂∂K∩Γ λIe ,e
,
where the constant Cs0 ,σ,A does not depend on u and h.
Note that the approximation uACMS converges to u even without any bubble eigenfunction
(i.e., IK = 1). For every element K, the first eigenvalue λ1,K verifies λ1,K ≥ C αhmin
2 , which
yields
a (u − uACMS , u − uACMS ) ≤ C
h2
2
kf kL2 (Ω)
αmin
+ Cs0 ,σ,A h2s0 −3
X
K∈Th
2
kukH s0 (K)
mine⊂∂K∩Γ λIe ,e
.
When IK = Ie = 1, the approximation uACMS still converges to u thanks to the vertex-specific
functions. This particular case was proved in [12, 22].
R EMARK 3.5. The error estimates in Proposition 3.4 are closely related to the pioneering
work of Bourquin [8, 9, 10] on component mode synthesis. The main difference lies in the
way the information is transferred among elements. Bourquin uses eigenmodes on Γ for
the Steklov-Poincaré operator. Here the vertex-specific functions ϕP and the edge-bubble
eigenfunctions carry information among elements and have local support.
The choice of basis functions in VACMS determine the efficiency of the discretization
method. The number of eigenfunctions cannot be known in advance and should be estimated
adaptively during the computations. The following proposition introduces an a posteriori
error indicator that could guide how to select the number of bubble eigenfunctions and edgebubble eigenfunctions.
P ROPOSITION 3.6. The error between u and uACMS satisfies
p
(3.13)
a (u − uACMS , u − uACMS ) ≤ Cε,σ,A
+h
2ε
X
K∈Th
+h2ε
(
X kf − PIK (f )k2L2 (K)
K∈Th
kf − PIK
2
(f )kL2 (K)
λIK ,K
X
e⊂∂K∩Γ
21
2
X Je ν Te A∇uACMS L2 (e)
e⊂Γ
λ1−2ε
Ie ,e
1
,
λ2−2ε
Ie ,e
!
ETNA
Kent State University
http://etna.math.kent.edu
118
U. HETMANIUK AND A. KLAWONN
where ε > 0 and Je (ψ) denotes the jump of a given function ψ across the edge e in the direction of the unit normal vector ν e . The constant Cε,σ,A depends on ε, σ, and the coefficient
matrix A.
The proof is given in Appendix B. Bound (3.13) indicates that the right hand side defines
an a posteriori error indicator. This error indicator is reliable, i.e., the error is bounded from
above by multiples of the indicator. Proving the effectivity of the error indicator remains an
open question.
R EMARK 3.7. In practice, the basis functions are computed numerically by introducing
a nested finer grid. The selection of this nested finer grid impacts both the accuracy and the
complexity of the algorithm. Finding error estimates and a posteriori error indicators for such
a two-grid scheme remains an open problem that is beyond the scope of this paper; see [11]
and [19] for a recent study applied to the multiscale finite element method. A complexity
comparison between a two-grid scheme and the standard application of the finite element
method would require a specific study with careful numerical experiments. However, to
estimate the merit of the two-grid scheme over the standard application of the finite element
method, flop count expressions are briefly discussed in the same style as the comparison of
Hou and Wu [21, Section 4.2].
h
If M
denotes the fine mesh size, then the fine grid yields O M 2 h−2 degrees of freedom. The computational complexity associated with the standard application of the finite
element method over the fine grid is dominated by the operation count for solving the linear
system,
O (M 2 h−2 )α = O(M 2α h−2α ),
where α ∈ [1, 3] depends on the specific linear solver used3 . The complexity for the two-grid
scheme based on component mode synthesis is
O(h−2α ) + max O(M 2α h−2 ), O(M 6 h−2 ), O(M 2α+1 h−2 ) ,
where O(h−2α ) is the cost of solving the algebraic equation (3.1). The other term estimates the cost for computing the basis functions ϕP , z∗,K , and EΩ (τ̃∗,e ), respectively. The
complexity for computing all the vertex-specific functions ϕP is O(M 2α h−2 ). The bubble
eigenfunctions z∗,K require, at most, O(M 6 h−2 ) operations. Note that this cost is an overestimate because it does not exploit the fact that only IK ≪ M 2 eigenmodes of a sparse
pencil are needed. O(M 2α+1 h−2 ) estimates the complexity for computing the edge-bubble
eigenfunctions EΩ (τ̃∗,e ).
When α = 1, the two-grid scheme is not attractive from an operation count point of
view. However, solvers with α = 1 are not common or available for a general coefficient
matrix A. As soon as α > 1, a two-grid scheme has some merit, especially when M is
1
smaller than h− 3 .
4. Numerical experiments. In this section, numerical experiments illustrate the sharpness of the previous bounds at academic examples. When the exact solution is not known
explicitly, the energy,
Z
Z
1
T
(∇v(x)) A (x) ∇v(x) dx −
f (x) v(x) dx,
E(v) =
2 Ω
Ω
represents an intrinsic metric for comparing the quality of approximations to the exact solution. Computing the difference between the energy of the computed solution and the energy
3 For a finite element discretization in two dimensions, a sparse solver is usually characterized by α =
for example, Heath [18, Table 11.4].
3
;
2
see,
ETNA
Kent State University
http://etna.math.kent.edu
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
119
−2
10
H1 semi−norm of absolute error
Discretization Error
Line of Slope −1/2
−3
10
−4
10
0
10
1
10
2
3
10
10
Number of bubble eigenfunctions
4
10
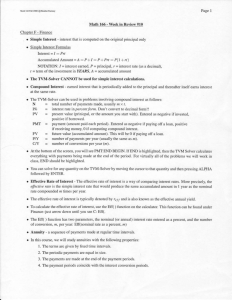
F IG . 4.1. Convergence curve for solution (4.1) with α = 1.51 and h = 1 (squared domain).
of the exact solution, E ∗ = E(u), is equivalent to computing the norm of the error for the
energy inner product,
E (v) − E ∗ =
a (u − v, u − v)
.
2
The minimum energy E ∗ is obtained by extrapolating energies for finite element solutions on
fine meshes.
4.1. Convergence towards a smooth solution. In this section, consider the problem
−∆u = f
in Ω = [0, 1] × [0, 1] ,
u=0
on ∂Ω,
where the domain [0, 1] × [0, 1] is partitioned by square elements.
First, the function f is chosen so that the exact solution is
α
(4.1)
u (x, y) = x − x2 y − y 2
,
where α > 23 . Figure 4.1 illustrates the convergence when only one element is used and the
number of bubble eigenfunctions is increased. When α = 1.51 ≈ 32 + ε, the right hand side f
belongs to L2 (Ω). The convergence curve exhibits a decrease proportional to √1λ , which is
I
predicted by the bound (3.3).
1
When f = 1, the right hand side now belongs to H 2 (Ω). In Figure 4.2, the convergence,
when only one element is used and the number of bubble eigenfunctions is increased, exhibits
a higher convergence rate, which is described by the projection error of f ,
kf kL2 (Ω)
kf − PI f kL2 (Ω)
√
≤ √
.
λI
λI
Keeping f = 1 and using only one bubble eigenfunction and one edge-bubble eigenfunction, Figure 4.3 illustrates the convergence when the number of elements is increased.
As expected, the convergence curve exhibits a decrease proportional to the mesh size h.
The next study keeps f = 1 and uses h = 12 and 4096 bubble eigenfunctions for every
element. Figure 4.4 illustrates the convergence when the number of edge-bubble eigenfunctions is increased. The convergence curve exhibits a plateau because the number of bubble
ETNA
Kent State University
http://etna.math.kent.edu
120
U. HETMANIUK AND A. KLAWONN
1
10
0
Absolute error
10
−1
10
−2
L2 norm of projection error for f
10
H1 semi−norm of discretization error
Line of slope −1/4
Line of slope −3/4
−3
10
0
1
10
2
3
10
10
Number of bubble eigenfunctions
10
F IG . 4.2. Convergence curve when f = 1 and h = 1 (squared domain).
−1
10
H1 semi−norm
−2
Absolute error
10
−3
10
−4
10
−3
10
−2
−1
10
10
0
10
h
F IG . 4.3. Convergence curve when f = 1 (squared domain).
−2
10
H1 semi−norm
Line of slope −3/2
−3
Absolute error
10
−4
10
−5
10
−6
10
0
10
1
2
10
10
Number of edge−bubble eigenfunctions
F IG . 4.4. Convergence curve when f = 1, h =
1
,
2
3
10
and 4096 bubble eigenfunctions are used (squared domain).
ETNA
Kent State University
http://etna.math.kent.edu
121
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
0
10
−1
Absolute error
10
−2
10
−3
10
H1 semi−norm
A posteriori error indicator
Line y = Ch2/3
−4
10 −4
10
−3
10
−2
10
Mesh size
−1
10
0
10
F IG . 4.5. Convergence curve for a fixed number of bubble and edge-bubble eigenfunctions (L-shaped domain,
f = 1).
−3
eigenfunctions is fixed. Before reaching this asymptote, the curve decreases like Ie 2 . This
rate is higher than the prediction in (3.12). Bourquin [9, p. 45] indicates that, for smooth
−3
functions, a superconvergence phenomenon is expected with the precise rate Ie 2 .
4.2. Problem on a L-shaped domain. In this section, consider the problem
1
1
, 1 × , 1 , u = 0 on ∂Ω,
−∆u = 1 in Ω = ([0, 1] × [0, 1]) \
2
2
where the domain Ω is partitioned by square elements. The exact solution belongs to
5
H 3 (Ω) ∩ H01 (Ω). For this problem, the approximate value for E ∗ is
E ∗ = −6.689868958058575 × 10−3 .
Proposition 3.4, bound (3.6), and conjecture (3.11) indicate that the error is bounded as follows
4
(4.2)
a (u − uACMS , u − uACMS ) ≤ C
h2
h3
2
2
kf kL2 (Ω) + C
kuk 53
.
H (Ω)
maxK IK
maxe Ie
The following experiments illustrate the sharpness of this result.
Using only one bubble eigenfunction and one edge-bubble eigenfunction, Figure 4.5
illustrates the convergence when the number of elements is increased. As expected, the con2
vergence curve exhibits a decrease proportional to h 3 . The a posteriori error indicator (3.13)
2
(with ε = 0) decreases also proportionally to h 3 . The ratio between the error indicator and
the semi-norm varies between 4 and 10.
Next, only one bubble eigenfunction is used while the mesh size h is decreased. The
number of edge-bubble eigenfunctions is set to the integer part of h1 . Figure 4.6 illustrates the
convergence when the number of elements is increased. Since maxe Ie = O( h1 ), bound (4.2)
suggests a convergence rate of h, which is matched by the numerical experiment. The plot
confirms that the impact of bubble eigenfunctions depends only on the regularity of the right
hand side f .
ETNA
Kent State University
http://etna.math.kent.edu
122
U. HETMANIUK AND A. KLAWONN
−1
10
−2
Absolute error
10
H1 semi−norm
A posteriori error indicator
Line y = Ch
−3
10
−4
10 −2
10
−1
0
10
Mesh size
10
F IG . 4.6. Convergence curve when f = 1 for a fixed number of bubble eigenfunctions (L-shaped domain).
−1
10
−2
Absolute error
10
−3
10
H1 semi−norm
A posteriori error indicator
Line y = CI−2/3
−4
10
0
10
h=
1
2
10
10
Number of edge−bubble eigenfunctions per edge
3
10
F IG . 4.7. Convergence curve for a varying number of edge-bubble eigenfunctions (L-shaped domain, f = 1,
= 256).
1
,I
4 K
Finally, in the next experiment, the number of edge-bubble eigenfunctions is varied while
the mesh size h is set to 41 and the number of bubble eigenfunctions to 256. Figure 4.7 illustrates the convergence when the number of edge-bubble eigenfunctions is uniformly increased. The semi-norm of the error and the a posteriori error indicator decrease proportion−2
ally to Ie 3 before reaching a plateau set by the constant number of bubble eigenfunctions.
−1
Bound (4.2) suggests only a decrease proportional to Ie 2 . This discrepancy is due to relation
(A.2) which does not exploit smoothness beyond H 1 (Γ).
4.3. Problem with varying coefficient. Finally, consider the problem
(4.3)
−∇ (c (x) ∇u (x)) = −1
u=0
in Ω = [0, 1] × [0, 1] ,
on ∂Ω,
ETNA
Kent State University
http://etna.math.kent.edu
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
123
TABLE 4.1
Error evolution for problem (4.3) as the mesh size h is reduced.
Mesh size
h = 41
h=
h=
h=
1
8
1
16
1
32
E (v) − E ∗
6.81 × 10−2
ηint
1.80 × 10−1
ηedge
1.8 × 10−3
6.94 × 10−3
1.31 × 10−2
6.34 × 10−5
2.04 × 10−2
4.24 × 10−2
1.35 × 10−3
3.58 × 10−3
where the coefficient c is
c (x, y) =
2 + 1.8 sin
2 + 1.8 cos
2πx
ε
2πy
ε
3.6 × 10−4
6.98 × 10−6
2 + sin 2πy
ε
+
2 + 1.8 sin 2πx
ε
with ε = 81 . The domain Ω is partitioned by square elements. This problem was initially
studied in [21]. The exact solution belongs to H 2 (Ω) ∩ H01 (Ω). For this problem, the
approximate value for E ∗ is
E ∗ = −4.826726636113407 × 10−3 .
The objective of this subsection is to assess the quality of the error indicator in Proposition 3.6. Denote
ηint =
X kf − PIK (f )k2L2 (K)
λIK ,K
K∈Th
and
ηedge =
X
K∈Th
kf − PIK
2
(f )kL2 (K)
X
e⊂∂K∩Γ
1
λ2Ie ,e
!
+
2
X Je ν Te A∇uACMS L2 (e)
e⊂Γ
λIe ,e
.
Table 4.1 describes the reduction of errors and error indicators as the mesh size is refined.
One edge-bubble eigenfunction for each edge and no bubble eigenfunctions are used. The
energy differences and the indicator ηint exhibit a reduction proportional to h2 . As can be
seen in Figure 4.4, a superconvergence phenomenon for the edge part of errors is possible;
see Bourquin [9, p. 45]. Here, the edge indicator ηedge is decreasing slightly faster than h3
for this range of mesh sizes.
Table 4.2 illustrates the same information when the number of edge-bubble eigenfunctions is uniformly increased. The mesh size is set to h = 18 and no bubble eigenfunction is
used. For this setup, the energy differences reach a plateau while the edge indicator ηedge is
−1
decreasing slightly faster than (maxe Ie ) , the prediction in (3.12).
5. Conclusion. This paper derives a priori error estimates for a special finite element
discretization based on component mode synthesis. The a priori error bounds state the explicit
dependency of constants with respect to the mesh size and the first neglected eigenvalues. A
residual-based a posteriori error indicator is also presented. Numerical experiments illustrate
that the error indicator is reliable.
Such indicator could guide the adaptive selection for the number of bubble and edgebubble eigenfunctions. In practice, the basis functions and eigenfunctions used in this special
finite element method are computed numerically by introducing a nested finer grid. To enhance the practicality of these special finite elements, future works will study error estimates
and a posteriori error indicators for the resulting two-grid scheme.
ETNA
Kent State University
http://etna.math.kent.edu
124
U. HETMANIUK AND A. KLAWONN
TABLE 4.2
Error evolution for problem (4.3) as the number of edge-bubble eigenfunctions is increased and h =
Edge-bubble eigenfunctions
1
2
4
8
E (v) − E ∗
2.04 × 10−2
1.81 × 10−2
1.62 × 10−2
1.59 × 10−2
ηint
4.24 × 10−2
4.24 × 10−2
4.24 × 10−2
4.24 × 10−2
1
.
8
ηedge
3.65 × 10−4
1.69 × 10−4
5.25 × 10−5
1.63 × 10−5
F IG . A.1. Example of domain D.
Acknowledgments. U. Hetmaniuk acknowledges the partial support by the National
Science Foundation under grant DMS-0914876.
Appendix A. Review of properties of the Steklov-Poincaré operator.
In this section, properties of the Steklov-Poincaré operator are compiled. Further details
and references are included in Bourquin [10] and Khoromskij and Wittum [25].
Consider a bounded polygonal domain D ⊂ R2 partitioned into two regions,
D = D1 ∪ D2 . The subdomains D1 and D2 are bounded convex polygons with straight
edges. The interface S = D1 ∩ D2 is illustrated in Figure A.1.
1
2
(S), the energy-minimizing extension E1 (τ ) ∈ H 1 (D1 ) is defined as
For any τ ∈ H00
the unique solution to the problem
−∇ · (A∇E1 (τ )) = 0 in D1 ,
E1 (τ ) = τ on S,
E1 (τ ) = 0 on ∂D1 ∩ ∂D.
The energy-minimizing E2 (τ ) ∈ H 1 (D2 ) is defined similarly in D2 . The matrix A is
uniformly symmetric positive definite on D as described by (2.1).
Introduce the symmetric bilinear form
Z
Z
T
T
b (τ, η) =
∇E1 (τ ) A∇E1 (η) +
∇E2 (τ ) A∇E2 (η) ,
D1
D2
1
2
(S). The continuity and coerciveness of b are consequences
for any function τ and η in H00
of the continuity of the energy-minimizing extension, of the trace operator on S, and of
ETNA
Kent State University
http://etna.math.kent.edu
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
125
1
2
(S) into L2 (S) is compact (see Bourproperties of A. Given that the injection of H00
quin [10, p. 390–391]), there exists a self-adjoint unbounded linear operator B on L2 (S)
with compact inverse such that
Z
(Bτ ) η, ∀η ∈ L2 (S)
b (τ, η) =
S
and for any arbitrary τ in the domain of the operator B,
o
n
1
2
(S) ; Bτ = ν T1 A∇E1 (τ ) + ν T2 A∇E2 (τ ) ∈ L2 (S) ,
D (B) = τ ∈ H00
where ν 1 , respectively ν 2 , is the unit outer normal vector to ∂D1 , respectively ∂D2 . Note
that the operator B can be decomposed as follows
with B1 τ = ν T1 A∇E1 (τ ) and B2 τ = ν T2 A∇E2 (τ )
Bτ = B1 τ + B2 τ
for any element τ in D(B).
1
2
When η belongs to H00
(S) ∩ H 1 (S), the compatibility conditions for traces on a polygon [2, Theorem 6.1] indicate that η satisfies
η̃|∂D1 ∈ H 1 (∂D1 )
and
η̃|∂D2 ∈ H 1 (∂D2 ) .
Then we have
(A.1)
kBηkL2 (S) ≤ kB1 η̃kL2 (∂D1 ) + kB2 η̃kL2 (∂D2 )
≤ CA kη̃kH 1 (∂D1 ) + CA kη̃kH 1 (∂D2 ) ≤ CA kηkH 1 (S) ,
where CA denotes a generic constant that may depend on the coefficient matrix A. The
constant CA does not depend on the length of S or on the diameter of D; see Nečas [27,
Theorem 1] for the bound between kBk η̃kL2 (∂Dk ) and kη̃kH 1 (∂Dk ) , where k = 1, 2.
+∞
Spectral decomposition. Spectral theory yields a family (φn )n=1 forming an orthogo1
2
+∞
nal basis of H00 (S) and L2 (S) and a sequence of real numbers (θn )n=1 such that
Z
1
2
b (φn , η) = θn
φn η,
∀η ∈ H00
(S) ,
S
and
Z
φ2n = 1
and
S
0 < θ1 ≤ θ2 ≤ · · · .
The eigenfunctions also satisfy Bφn = θn φn ; see Bourquin [10, p. 392].
For η ∈ L2 (S), define the projection
ΠL (η) =
L−1
X Z
n=1
S
ηφn φn .
When Bη belongs to L2 (S), we write
Z
Z
Z
1
1
ηφn =
η (Bφn ) =
(Bη) φn .
θn S
θn S
S
ETNA
Kent State University
http://etna.math.kent.edu
126
U. HETMANIUK AND A. KLAWONN
1
2
(S) with Bη ∈ L2 (S), it holds that
For η ∈ H00
b (η − ΠL (η) , η − ΠL (η)) =
+∞
X
θn
n=L
Z
ηφn
S
2
=
Z
2
+∞
X
1
(Bη) φn
θn
S
n=L
1
1
2
2
kBη − ΠL (Bη)kL2 (S) ≤
kBηkL2 (S) .
≤
θL
θL
1
2
In particular, when η ∈ H00
(S) ∩ H 1 (S), relation (A.1) implies that Bη belongs to L2 (S).
In this case, the projection error satisfies
b (η − ΠL (η) , η − ΠL (η)) ≤
(A.2)
CA
2
kηkH 1 (S) .
θL
1
2
Bounds in dual spaces will also be needed. For η ∈ H00
(S), we write
2
+∞ Z
X
2
2
Z
+∞
X
1 2s
ηφ
θ
n
θ2s n
S
S
n=L n
n=L
Z
2
+∞
1 X 2s
≤ 2s
θn
ηφn
θL
S
kη − ΠL (η)kL2 (S) =
ηφn
=
n=L
for 0 ≤ s < 21 . Using the equivalence between the norms
v
u +∞
2
Z
uX
t
and kηkH s (S)
ηφn
(1 + θn2s )
for 0 ≤ s <
S
n=1
1
2
(see, for example, Khoromskij and Wittum [25, Section 1.7]), we obtain
2
kη − ΠL (η)kL2 (S) ≤
(A.3)
Cs,A
2
s kηkH s (S)
θL
for 0 < s < 21 , where Cs,A does not depend on the length of S.
1
After continuously extending the projection ΠL to H − 2 (S) =
1
estimates hold in H − 2 (S),
(A.4)
2
1
H − 2 (S)
kη − ΠL (η)k
≤
′
1
2
H00
(S) , similar
Cs,A
1
2
2
kη − ΠL (η)kL2 (S) ≤ 1+2s kηkH s (S)
θL
θL
for 0 ≤ s < 21 , where Cs,A does not depend on the length of S.
Appendix B. Proof of Proposition 3.6.
Proof. Recall that the exact solution u satisfies
Z
a(u, v) =
f v, ∀v ∈ H01 (Ω)
Ω
and that PIK is the projection operator defined by (3.5). The function f can be decomposed
as follows
X
X
[f − PIK (f )]
PIK (f ) +
f=
K∈Th
K∈Th
ETNA
Kent State University
http://etna.math.kent.edu
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
127
such that
Z
X Z
fv =
Ω
K∈Th
X Z
=
K∈Th
+
X Z
K
PIK (f ) v +
K
PIK (f ) vB,K +
X Z
K∈Th
K
K∈Th
[f − PIK (f )] v
K
X Z
K∈Th
PIK (f ) vΓ
K
[f − PIK (f )] vB,K +
X Z
K∈Th
K
[f − PIK (f )] vΓ ,
where the decomposition
v=
X
vB,K + vΓ
K∈Th
has been used. The orthogonality of eigenfunctions z∗,K yields
Z
X Z
X Z
PIK (f ) vΓ
PIK (f ) PIK (vB,K ) +
fv =
Ω
K∈Th
+
K
X Z
K∈Th
K
K∈Th
K
[f − PIK (f )] [vB,K − PIK (vB,K )] +
X Z
K∈Th
K
[f − PIK (f )] vΓ .
At the same time, the approximate solution uACMS ∈ VACMS satisfies
Z
X Z
T
T
(∇uACMS,Γ ) A∇vΓ .
a (uACMS , v) =
(∇uACMS,B ) A∇PIK (vB,K ) +
K∈Th
Ω
K
Integration by parts of the second term over every element K gives
X Z
T
a (uACMS , v) =
(∇uACMS,B ) A∇PIK (vB,K )
K∈Th
+
K
X X Z
K∈Th e⊂∂K
e
ν Te A∇uACMS,Γ vΓ .
Combining all the previous relations, we have
X Z
[f − PIK (f )] [vB,K − PIK (vB,K )]
a (u − uACMS , v) =
+
X Z
K∈Th
(B.1)
+
X Z
K∈Th
−
K∈Th
K
X Z
K
PIK (f ) vΓ +
K
PIK (f ) PIK (vB,K ) −
X X Z
K∈Th e⊂∂K
K∈Th
K
[f − PIK (f )] vΓ
X Z
K∈Th
ν Te A∇uACMS,Γ vΓ .
e
T
(∇uACMS,B ) A∇PIK (vB,K )
K
On every element K, the bubble function uACMS,B satisfies
−∇ · (A∇uACMS,B ) = PIK (f ) .
ETNA
Kent State University
http://etna.math.kent.edu
128
U. HETMANIUK AND A. KLAWONN
Hence, we get
Z
T
(∇uACMS,B ) A∇PIK (vB,K ) =
K
Z
K
PIK (f ) PIK (vB,K )
and
Z
(B.2)
Z
PIK (f ) vΓ = −
∇ · (A∇uACMS,B ) vΓ
K
Z K
X Z
T
=
(∇uAM CS,B ) A∇vΓ −
K
=−
X Z
e⊂∂K
e⊂∂K
e
ν Te A∇uACMS,B vΓ
e
ν Te A∇uACMS,B vΓ
by orthogonality. Equations (B.1) and (B.2) yield
X Z
a (u − uACMS , v) =
[f − PIK (f )] [vB,K − PIK (vB,K )]
K∈Th
+
K
X Z
K∈Th
−
K
[f − PIK (f )] vΓ
X X Z
K∈Th e⊂∂K
e
ν Te A∇uACMS,B + ν Te A∇uACMS,Γ vΓ
and
a (u − uACMS , v) =
X Z
K∈Th
+
K
[f − PIK (f )] [vB,K − PIK (vB,K )]
X Z
K∈Th
K
[f − PIK (f )] vΓ −
XZ
e⊂Γ
e
Je ν Te A∇uACMS vΓ ,
where Je (ψ) denotes the jump of a given function ψ across the edge e in the direction ν e .
Next, we write
X Z
[f − PIK (f )] [vB,K − PIK (vB,K )]
a (u − uACMS , v − vACMS ) =
K∈Th
+
(B.3)
K
X Z
K∈Th
−
XZ
e⊂Γ
e
K
[f − PIK (f )] (vΓ − vACMS,Γ )
Je ν Te A∇uACMS (vΓ − vACMS,Γ ) ,
for all functions v ∈ H01 (Ω) and vACMS ∈ VACMS . Now the right hand side is bounded term
by term to define an a posteriori error indicator.
First, on every element K, we have
Z
[f − PIK (f )] [vB,K − PIK (vB,K )]
K
≤ kf − PIK (f )kL2 (K) kvB,K − PIK (vB,K )kL2 (K)
ETNA
Kent State University
http://etna.math.kent.edu
129
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
and
Z
K
[f − PIK (f )] [vB,K − PIK (vB,K )]
≤ kf − PIK (f )kL2 (K)
sR
T
K
(∇vB,K ) A∇vB,K
λIK ,K
or
Z
(B.4)
K
[f − PIK (f )] [vB,K − PIK (vB,K )]
kf − PIK (f )kL2 (K)
p
≤
λIK ,K
sZ
T
(∇v) A∇v.
K
Before bounding the second and third terms of (B.3), vACMS,Γ is set as follows
!
X
vACMS,Γ = EΩ Q (vΓ ) +
ΠIe (vΓ − Q (vΓ )) ,
e⊂Γ
where the operator Q is the L2 -projection into the finite-dimensional subspace spanned by
the piecewise linear functions on Γ.
On every element K, the second term of (B.3) is bounded,
Z
[f − PIK (f )] [vΓ − vACMS,Γ ] ≤ kf − PIK (f )kL2 (K) kvΓ − vACMS,Γ kL2 (K) .
K
Define z as the unique solution in H01 (K) of
−∇ · (A∇z) = vΓ − vACMS,Γ
in K.
Since K is convex, the function z belongs to H 2 (K). We have
Z
2
kvΓ − vACMS,Γ kL2 (K) =
(∇z)T A∇(vΓ − vACMS,Γ )
K
X Z
−
ν Te A∇z (vΓ − vACMS,Γ )
e
e⊂∂K
=−
X Z
e⊂∂K
e
ν Te A∇z (vΓ − vACMS,Γ )
because vΓ − vACMS,Γ is an energy-minimizing extension. Next, we write
X
2
(B.5)
kvΓ − vACMS,Γ kL2 (K) ≤
kvΓ − vACMS,Γ k − 21 ν T A∇z H
(e)
For every edge e ⊂ ∂K, we have
T
ν A∇z 1
≤ CA kzkH 2 (K) ≤ CA kvΓ − vACMS,Γ kL2 (K) .
2
H (e)
Plugging this relation into (B.5), we get
kvΓ − vACMS,Γ kL2 (K) ≤ CA
X
e⊂∂K
kvΓ − vACMS,Γ k
1
H − 2 (e)
.
1
H 2 (e)
e⊂∂K
.
ETNA
Kent State University
http://etna.math.kent.edu
130
U. HETMANIUK AND A. KLAWONN
The bound (A.4) on the projection error now yields
kvΓ − vACMS,Γ kL2 (K) ≤ Cε,A
X kvΓ − Q (vΓ )kH 12 −ε (e)
λI1−ε
e ,e
e⊂∂K
with 0 < ε < 21 . Using properties of the projection operator Q gives
kvΓ − vACMS,Γ kL2 (K) ≤ Cε,A
X
e⊂∂K
hε
|vΓ | 21 ;
H (e)
λI1−ε
e ,e
see Steinbach [30, Eqn (12.19) on p. 271]. Using the continuity of the trace operator modifies
the inequality as follows
kvΓ − vACMS,Γ kL2 (K) ≤ CCε,A kvΓ kH 1 (K)
X
e⊂∂K
hε
λI1−ε
e ,e
!
.
The second term of (B.3) is bounded by
(B.6)
Z
K
[f − PIK (f )] [vΓ − vACMS,Γ ]
≤ Cε,A kf − PIK (f )kL2 (K) kvkH 1 (K)
X
e⊂∂K
hε
λI1−ε
e ,e
!
.
For every interior edge e ⊂ Γ, the third term of (B.3) satisfies
Z
Je ν Te A∇uACMS (vΓ − vACMS,Γ )
e
≤ Je ν Te A∇uACMS L2 (e) kvΓ − vACMS,Γ kL2 (e) .
Combining the bound (A.3) with s =
(B.7)
1
2
− ε and properties of the projection operator Q yield
kvΓ − vACMS,Γ kL2 (e) ≤ Cε,A
hε
1
−ε
λI2e ,e
|vΓ |
1
H 2 (e)
where 0 < ε < 21 .
Combining (B.3), (B.4), (B.6), and (B.7) gives
X kf − PIK (f )kL2 (K)
p
a (u − uACMS , v) ≤
λIK ,K
K∈T
h
+ Cε,A
X
K∈Th
+ Cε,A
sZ
T
(∇v) A∇v
K
kf − PIK (f )kL2 (K)
X
hε
λ1−ε
e⊂∂K∩Γ Ie ,e
!
kvkH 1 (K)
X hε Je ν Te A∇uACMS 2 |vΓ | 1
1
L (e)
H 2 (e)
2 −ε
e⊂Γ λIe ,e
ETNA
Kent State University
http://etna.math.kent.edu
131
ERROR ESTIMATES FOR SPECIAL FINITE ELEMENT METHOD
for any function v ∈ H01 (Ω) and ε > 0. The Cauchy-Schwarz inequality implies
(
X kf − PIK (f )k2L2 (K)
a (u − uACMS , v)
p
≤ Cε,A
λIK ,K
a (v, v)
K∈Th
+ h2ε
X
K∈Th
+h2ε
kf − PIK
X
2
(f )kL2 (K)
e⊂∂K∩Γ
21
2
X Je ν Te A∇uACMS L2 (e)
λ1−2ε
Ie ,e
e⊂Γ
where we used
X
2
K∈Th
2
kvkH 1 (K) = kvkH 1 (Ω) ≤
C
αmin
Z
1
λ2−2ε
Ie ,e
!
,
T
(∇v) A∇v
Ω
and
X
e⊂Γ
2
|v| 21
H (e)
≤
X
K∈Th
2
|v| 12
H (∂K)
≤C
X
K∈Th
2
|v|H 1 (K)
C
≤
αmin
Z
T
(∇v) A∇v.
Ω
The energy norm of the error u − uACMS is bounded from above by a multiple of
!
(
X
X
X kf − PIK (f )k2L2 (K)
1
2
2ε
kf − PIK (f )kL2 (K)
+h
λIK ,K
λ2−2ε
K∈Th
K∈Th
e⊂∂K∩Γ Ie ,e
2
)1
X Je ν Te A∇uACMS L2 (e) 2
2ε
.
+h
λ1−2ε
Ie ,e
e⊂Γ
REFERENCES
[1] T. A RBOGAST, Mixed multiscale methods for heterogeneous elliptic problems, in Numerical Analysis of
Multiscale Problems, I. G. Graham, T. Y. Hou, O. Lakkis, and R. Scheichl, eds., vol. 83 of Lect. Notes
Comput. Sci. Eng., Springer, Heidelberg, 2012, pp. 243–283.
[2] D. A RNOLD , L. S COTT, AND M. VOGELIUS, Regular inversion of the divergence operator with Dirichlet
boundary conditions on a polygon, Ann. Scuola Norm. Sup. Pisa Cl. Sci., 15 (1988), pp. 169–192.
[3] I. BABU ŠKA , U. BANERJEE , AND J. E. O SBORN, On principles for the selection of shape functions for the
generalized finite element method, Comput. Methods Appl. Mech. Engrg., 191 (2002), pp. 5595–5629.
[4]
, Generalized finite element methods—main ideas, results and perspective, Int. J. Comput. Methods.,
1 (2004), pp. 67–103.
[5] I. BABU ŠKA , G. C ALOZ , AND J. E. O SBORN, Special finite element methods for a class of second order
elliptic problems with rough coefficients, SIAM J. Numer. Anal., 31 (1994), pp. 945–981.
[6] I. BABU ŠKA AND J. E. O SBORN, Generalized finite element methods: their performance and their relation
to mixed methods, SIAM J. Numer. Anal., 20 (1983), pp. 510–536.
[7] J. K. B ENNIGHOF AND R. B. L EHOUCQ, An automated multilevel substructuring method for eigenspace
computation in linear elastodynamics, SIAM J. Sci. Comput., 25 (2004), pp. 2084–2106.
[8] F. B OURQUIN, Analysis and comparison of several component mode synthesis methods on one-dimensional
domains, Numer. Math., 58 (1990), pp. 11–33.
, Synthèse Modale et Analyse Numérique des Multistructures Élastiques, Ph.D. Thesis, Université
[9]
Paris VI, Paris, 1991.
[10]
, Component mode synthesis and eigenvalues of second order operators: discretization and algorithm,
RAIRO Modél. Math. Anal. Numér., 26 (1992), pp. 385–423.
[11] F. B REZZI AND L. D. M ARINI, Augmented spaces, two-level methods, and stabilizing subgrids, Internat. J.
Numer. Methods Fluids, 40 (2002), pp. 31–46.
ETNA
Kent State University
http://etna.math.kent.edu
132
U. HETMANIUK AND A. KLAWONN
[12] C.-C. C HU , I. G. G RAHAM , AND T.-Y. H OU, A new multiscale finite element method for high-contrast
elliptic interface problems, Math. Comp., 79 (2010), pp. 1915–1955.
[13] R. C RAIG , J R . AND M. BAMPTON, Coupling of substructures for dynamic analysis, AIAA J., 6 (1968),
pp. 1313–1319.
[14] W. E, B. E NGQUIST, X. L I , W. R EN , AND E. VANDEN -E IJNDEN, Heterogeneous multiscale methods: a
review, Commun. Comput. Phys., 2 (2007), pp. 367–450.
[15] Y. E FENDIEV AND T. Y. H OU, Multiscale Finite Element Methods. Theory and Applications, Springer, New
York, 2009.
[16] P. G ERVASIO , E. OVTCHINNIKOV, AND A. Q UARTERONI, The spectral projection decomposition method
for elliptic equations in two dimensions, SIAM J. Numer. Anal., 34 (1997), pp. 1616–1639.
[17] P. G RISVARD, Elliptic Problems in Nonsmooth Domains, SIAM, Philadelphia, 2011.
[18] M. H EATH, Scientific Computing—An Introductory Survey, McGraw-Hill, New York, 1997.
[19] P. H ENNING , M. O HLBERGER , AND B. S CHWEIZER, An adaptive multiscale finite element method, Tech.
Report 05/12, Angewandte Mathematik und Informatik, Universität Münster, 2012.
[20] U. H ETMANIUK AND R. L EHOUCQ, A special finite element method based on component mode synthesis
techniques, M2AN Math. Model. Numer. Anal., 44 (2010), pp. 401–420.
[21] T. Y. H OU AND X.-H. W U, A multiscale finite element method for elliptic problems in composite materials
and porous media, J. Comput. Phys., 134 (1997), pp. 169–189.
[22] T. Y. H OU , X.-H. W U , AND Z. C AI, Convergence of a multiscale finite element method for elliptic problems
with rapidly oscillating coefficients, Math. Comp., 68 (1999), pp. 913–943.
[23] W. C. H URTY, Vibrations of structural systems by component-mode synthesis, J. Engrg. Mech. Div., 86
(1960), pp. 51–69.
[24] M. J OHNSON AND U. H ETMANIUK, Spectrum and dispersion analyses for a special finite element discretization based on component mode synthesis, in Proceedings of the 10th International Conference on Mathematical and Numerical Aspects of Waves, Vancouver, PIMS, Vancouver, 2011.
[25] B. K HOROMSKIJ AND G. W ITTUM, Numerical Solution of Elliptic Partial Differential Equations by Reduction to the Interface, Springer, Berlin, 2004.
[26] J. M. M ELENK, On n-widths for elliptic problems, J. Math. Anal. Appl., 247 (2000), pp. 272–289.
[27] J. N E ČAS, Sur les équations différentielles aux dérivées partielles du type elliptique du deuxième ordre,
Czechoslovak Math. J., 14 (1964), pp. 125–146.
[28] J. N OLEN , G. PAPANICOLAOU , AND O. P IRONNEAU, A framework for adaptive multiscale methods for
elliptic problems, Multiscale Model. Simul., 7 (2008), pp. 171–196.
[29] A. Q UARTERONI AND A. VALLI, Domain Decomposition Methods for Partial Differential Equations, Oxford
University Press, New York, 1999.
[30] O. S TEINBACH, Numerical Approximation Methods for Elliptic Boundary Value Problems, Springer, New
York, 2008.
[31] A. T OSELLI AND O. W IDLUND, Domain Decomposition Methods—Algorithms and Theory, Springer, Berlin,
2005.