Design Limits and Dynamic Policy Analysis
advertisement

Design Limits and Dynamic Policy Analysis
William A. Brock, Steven N. Durlauf, and Giacomo Rondina
May 25, 2006
Preliminary and Incomplete
JEL Classification Codes: C52, E6
Keywords: design limits, stabilization policy, robustness, model uncertainty
Design Limits and Optimal Policy Analysis
Abstract
This paper characterizes the frequency domain properties of linear systems with feedback
control rules. The goal of the analysis is to derive restrictions on how feedback rules
restrict the frequency by frequency fluctuations that underlie a time series of state
variables. The tradeoffs are known in the control literature as design limits. We extend
existing results in the control theory literature to account for discrete time bivariate
systems with rational expectations. Our basic methods provide ways to understand how
fluctuations at different frequencies are subject to tradeoffs via the choice of a feedback
rule. Application is made to the evaluation of monetary policy.
William A. Brock
Department of Economics
University of Wisconsin
1180 Observatory Drive
Madison, WI 53706-1393
wbrock@ssc.wisc.edu
Steven N. Durlauf
Department of Economics
University of Wisconsin
1180 Observatory Drive
Madison, WI 53706-1393
sdurlauf@ssc.wisc.edu
Giacomo Rondina
Department of Economics
University of Wisconsin
1180 Observatory Drive
Madison, WI 53706-1393
grondina@ssc.wisc.edu
I. Introduction
This paper explores a set of constraints on the effects of control policies on
fluctuations from the perspective of the frequency domain. Aspects of these constraints
were initially discussed in Brock and Durlauf (2004,2005) but otherwise do not appear to
have been previously explored in economics contexts.
The constraints we study
represent fundamental limits on the effects of alternative policies in the sense that they
describe how frequency-specific tradeoffs in volatility apply to all linear feedback rules.
The sorts of constraints we explore may be illustrated in the following example.
Suppose one is considering how different controls affect the variance of a state variable
x t . Underlying the statistic var (x t C ) , the variance of the process given a control, is the
spectral density of x given the rule, fx C (ω ) , as of course the variance is derivative of the
spectral density, since
var (x t C ) =
∫
π
−π
fx C (ω )d ω .
(1)
In fact, the spectral representation of the variance of the state means one can understand
the sum of the variances from random and orthogonal sine and cosines of different
frequencies. By implication, calculations of the effects of a rule on the overall variance
mask the effects on fluctuations at the different frequencies in [−π, π ] . Further, eq. (1)
hints at the idea that a rule that minimizes the overall variance may exacerbate
fluctuations at certain frequencies. A major goal of this paper is to determine under what
circumstances this must happen and what forms such fundamental tradeoffs take. In the
control literature, these tradeoffs are known as design limits.
Design limits are a well established area of study in control theory.1 Results of
this type are sometimes known as Bode integral constraints, after Hendrik Bode who first
proposed them in the 1930’s. The great bulk of the work in control theory focuses on
single-input, single-output (SISO) systems. One methodological contribution of this
1
Our description of linear systems owes much to the formulation in Kwakernaak and
Sivan (1972), especially chapter 6.
1
paper is that we derive frequency tradeoffs for multiple-input multiple-output (MIMO)
systems. While there does exist a set of disparate results in the control literature on
frequency tradeoffs for multivariate systems, this work has largely been done for
continuous time systems.2 One methodological contribution of this paper is that we
derive frequency tradeoffs for discrete time. A second methodological contribution is
that we study these tradeoffs when expectations of future state variables affect current
values; a property that, while of course natural for economic models, does not arise in
engineering contexts. Our focus will be on two-input two-output MIMO systems. We
defer consideration of systems with arbitrary dimension to future work, noting here that
the 2 × 2 case captures a range of important contexts, most notably the evaluation of
macroeconomic stabilization policy, which will be the focus of our application of the
general methods.
Why are frequency specific tradeoffs of interest to a policymaker? One reaction
to the proposal that policymakers face frequency-by-frequency constraints might be that
these constraints are irrelevant if the objective of a policymaker is to minimize the overall
variance of some combination of states and controls of the system; such loss functions are
standard in the literature on evaluating monetary policy rules. We argue that our results
are of interest for several reasons. First, there is no principled reason why policymaker
loss functions should only depend on the overall variances of variables of interest, and in
fact nonseparable preferences for policymakers can lead to difference losses for different
frequency-specific fluctuations. Examples of this property are found in Otrok (2001) and
Otrok, Ravikumar, and Whiteman (2002), Second, there are classes of problems for
which the frequency restrictions matter, even if loss functions only depend on
unconditional variances. Specifically, evaluating the robustness of policy rules in the face
of model uncertainty may be facilitated using the constraints we describe; an initial
example of such an analysis is Brock and Durlauf (2005).
The use of frequency domain methods is not original per se, of course. One
classic example is Hansen and Sargent (1980)’s use of z-transform methods to translate
time domain expectations into the frequency domain and thereby solve for testable
restrictions of rational expectations models.
2
Another important contribution is
See Skogestad and Postlethwaite (1996) for a survey.
2
Whiteman’s (1985,1986) work on spectral utility and the frequency domain analysis of
the effects of policies; Whiteman’s work is close in spirit to ours, although it does not
address the issue of frequency-specific tradeoffs. More recently, frequency methods are
proven important in the development of robustness, cf. Sargent (1999). Yet another
interesting application is developed in Kasa (2000) and Kasa, Walker and Whiteman
(2004) which show how frequency domain methods may be used respectively to show
how to characterize how individuals form beliefs about the beliefs of others and the
equilibrium characterization of prices in markets with asymmetric beliefs. That being
said, frequency domain approaches continue to be far less popular than time domain
methods for analyzing macroeconomic dynamics. We believe the methods developed
here complement these other papers in demonstrating that frequency domain approaches
have an important role in understanding stabilization policy. While, in principle, one can
always translate results from the frequency domain to the time domain and vice versa, the
results we exploit are an example in which working in the frequency domain is relatively
straightforward whereas it would appear that the same analysis in the time domain may
well be intractable.3
Section 2 provides an analysis of three classes of models: backwards-looking
MIMO systems, forwards-looking MIMO systems, and SIMO (single input, multiple
output) systems. We also consider tradeoffs between frequency-specific variances of
states and controls. Section 3 provides examples. Section 4 applies our methods to the
evaluation of Taylor rules. Section 5 contains summary and conclusions. Appendices
follow which contains proofs of various claims made in the text as well as some
examples of general findings.
2. Design limits in multivariate systems
i. backwards looking models
3
For example, the Bode integral constraint, which we exploit in the subsequent analysis,
has an extremely convoluted time domain representation for a SISO system, cf. Iglesias
(2001) equation 3.2 and surrounding discussion.
3
We first consider a backward looking system, i.e. one where expectations do not
directly enter into the law of motion for the states. Letting, x t denote a 2 × 1 vector of
states, ut a 2 × 1 vector of controls, and εt a 2 × 1 vector of innovations that is weakly
stationary across time, the canonical law of motion for a backwards looking system is
A0x t = A (L ) x t −1 + B (L ) ut + εt .
(2)
In general, the matrix A0 will possess off diagonal elements because of contemporary
interdependences between the states; without loss of generality, we write the matrix as
⎛ 1 a 0,2 ⎞⎟
⎟⎟ .
A0 = ⎜⎜⎜
⎝⎜a 0,3 1 ⎠⎟⎟
The moving averaging representation of εt is
εt = W (L ) wt .
(3)
We assume that each element of W (L ) may be written as the ratio of two finite
dimensional polynomials,4 i.e.
⎛ wn,1 (L ) wn ,2 (L )⎞⎟
⎜⎜
⎟
⎜⎜ wd ,1 (L ) wd ,2 (L ) ⎟⎟
⎟⎟
.
W (L ) = ⎜⎜
⎜⎜ wn ,3 (L ) wn ,4 (L )⎟⎟⎟
⎟⎟
⎜⎜
⎜⎝ wd ,3 (L ) wd ,4 (L )⎠⎟⎟
(4)
This assumption means that ε t possesses a rational spectral density matrix. See Hansen
and Sargent (1983) for an example of how rational spectral densities have been used in
econometrics.
4
4
Notice that we do not require the moving average representation to be fundamental. The
reason for this is that our interpretation of the backwards looking model is that it is a
structural description of a system.5
Our analysis focuses on linear feedback rules of the form
ut = U (L ) x t −1 .
(5)
Each choice of this polynomial will produce a different spectral density matrix for the
state variable, via the law of motion
A0x t = A (L ) x t −1 + B (L )U (L ) x t −1 + εt .
(6)
The moving average representation of the system is
−1
x t = (A0 − (A (L ) + B (L )U (L )) L ) W (L ) wt .
(7)
This implies that the spectral density matrix for x t , given a choice of U (L ) , is
fx C (ω ) =
1 C −iω
D (e ) Σw DC (e −iω )′ ,
2π
(8)
where Σw is the variance covariance matrix of w and
(
DC (e −iω ) = A0 − (A (e −iω ) + B (e −iω )U (e −iω ))e −iω
)
−1
W (e −iω ) .
(9)
The superscript C is used because of the dependence of the moving average
representation on the choice of control. Each choice of the polynomial U (L ) will
5
See Fernandez-Villaverde, Rubio-Ramirez, and Sargent (2005) for a comprehensive
analysis of the relationship between unrestricted vector autoregressions and structural
models, in which invertibility of analogs to W ( L ) plays a key role.
5
produce a different spectral density matrix for the state variable vector. Our objective is
to describe these limits.
One way to understand the effects of a control role is via the way that U (e −iω )
maps to DC (e −iω ) . Put differently, the feasible outcomes a policymaker can produce via
alternative control rules may be interpreted as the support of the mapping of the set of
possible feedback rules to DC (e −iω ) .
Underlying our calculations of this type is a
lemma due to Wu and Jonckhere (1988) which describes the properties of the integrals of
logarithms of simple squared polynomials. We provide a slightly different statement of
the lemma and a proof in the Appendix.
Lemma 1. (Wu and Jonkheere)
∫
π
−π
2
log e iω − r d ω = 0 if r < 1, 2πlog r 2 otherwise .
(10)
The reason that this lemma is so important in the determination of fundamental limits to
policies is that in linear environments, the various objects of interest, which amount to
products of various polynomials with their associated inner products, can be reduced to
products of inner products of simple polynomials; restrictions on the values of these
polynomials will turn out to be described by (10).
In the case of restrictions on the moving average polynomial DC (e −iω ) , we will
need to focus on the properties of W (L ) , specifically
wMA
det (W (z )) = w
∏ (1 − w z )
t
i =1
wAR
∏(1 − ρ z )
.
(11)
t
i =1
where
wMA
is
the
degree
of
the
polynomial
wn ,1 (L ) wn ,4 (L ) wd ,2 (L ) wd ,3 (L ) − wn ,2 (L ) wn ,3 (L ) wd ,1 (L ) wd ,4 (L ) , wAR is the degree of
6
the polynomial wd ,1 (L ) wd ,4 (L ) wd ,2 (L ) wd ,3 (L ) and w is the ratio of the zero degree
coefficients on the two polynomials above. Since the innovations εt are second order
stationary, the roots ρi all lie inside the unit circle. However, the roots wi may lie
outside the unit circle as we have not assumed the shocks are fundamental.
Our first result characterizes the feasible values of DC (e −iω ) .
Theorem 1. Design limits on the MA polynomial in a backwards looking MIMO
model
For the system described by eq. (2), the Fourier transform of the associated sensitivity
matrix moving average coefficients, DC (e −iω ) , must fulfill
∫
π
−π
(
2
)
log det DC (e −iω ) d ω = K w ,
(12)
where
⎛
K w = 4π ⎜⎜⎜log w − log a + ∑ log wui
⎜⎝
ui
⎞⎟
⎟⎟, i ∈ {ui } if wi > 1, a = det (A0 ) . (13)
⎠⎟
Pf. See Appendix
The restrictions on possible moving average representations for a controlled
system may be elucidated by comparing the properties of the law of motion for the state
vector when a control is present with the law of motion when there is no control, i.e.
ut = 0 ∀t . The uncontrolled system is simply
A0x t = A (L ) x t −1 + εt .
7
(14)
One can understand the effects of the choice of a control via the differences between the
spectral density of the controlled and uncontrolled process, i.e. fx C (ω ) versus fx NC (ω ) .
To make this comparison, first define the spectral density of the no-control system as,
fx NC (ω ) = D NC (e −iω ) Σw D NC (e −iω )′ ,
(15)
where
−1
D NC (e −iω ) = (A0 − A (e −iω )e −iω ) W (e −iω ) .
(16)
Following the control literature, one defines a sensitivity matrix S (e −iω ) via the way in
which the control transforms D NC (e −iω ) into DC (e −iω ) , i.e.
−1
S (e −iω ) = DC (e −iω ) D NC (e −iω ) .
(17)
This allows one to characterize the effects on the spectral density of a given control by
fx C (ω ) = S (e −iω ) fx NC (ω ) S (e −iω )′ .
(18)
This formulation makes clear why in the control literature, the sensitivity function is said
to shape the state vector.
Each DC (e −iω ) maps into a S (e −iω ) , hence for the policymaker one can think of
the choice of control as the choice of a sensitivity function and any constraints on
DC (e −iω ) in turn may be translated into constraints on S (e −iω ) . To understand the
constraints on the sensitivity function, notice that,
8
∫
π
−π
∫
π
−π
(
log det D
C
(e
(
) )d ω − ∫
)
log ( det D
2
log det S (e −iω ) d ω =
−i ω
2
π
−π
NC
(e )
−i ω
2
)d ω.
(19)
The first term is explicitly characterized by Theorem 1. The second term is implicitly
characterized by Theorem 1 and, defining λi as the eigenvalues of the characteristic
polynomial of the uncontrolled system, equals
∫
π
−π
(
2
)
log det D NC (e −iω ) d ω = K w − 4π ∑ log λvi i ∈ {vi } if λi > 1 .
(20)
vi
Combining (13) and (20) immediately provides Theorem 2.
Theorem 2. Design limits on the sensitivity matrix for a backwards looking MIMO
model
For the system described by eq. (2), the associated sensitivity matrix S (e −iω ) must fulfill
∫
π
−π
(
2
)
log det S (e −iω ) d ω = K B ,
(21)
where
K B = 4π ∑ log λvi i ∈ {vi } if λi > 1 .
(22)
vi
This expression has several properties of interest.
First, K B = 0 whenever the unconstrained system is stable. This means that for
a large class of models, the constraint on the sensitivity function is identical. More
generally, different models may be sorted into equivalence classes with respect to K B as
its value is entirely determined by the unstable roots in the A (L ) polynomial. Notice as
9
well that the value of the constraint does not depend on the control rule nor does it
depend on W (L ) , i.e. the (second-order) time series structure of εt .
Second, taken together, the facts that a nonzero constraint only occur when the
uncontrolled system is unstable and that the magnitudes and number of the unstable roots
determine the value of the constraint, indicate that the use of a control to eliminate unit or
explosive roots in a system does have a cost in terms of the ability of the policymaker to
stabilize fluctuations after these roots have been eliminated. In this sense, trends and
cycles do not represent independent aspects of stabilization policy.
Third, policymakers inevitably must trade off variance at different frequencies.
Since λi ≥ 1 , it is immediate from (22) that K B ≥ 0 . This implies that it is impossible
2
for det S (e −iω ) < 1 ∀ω ∈ [−π, π ] and therefore it is impossible to reduce the variance
contributions at all frequencies when one moves from the uncontrolled system to a
2
controlled one. Further, the integral constraint implies that det S (e −iω ) > 1 for some
2
interval of frequencies if det S (e −iω ) < 1 for another. In order to reduce the variance
contributions of one interval of frequencies, it is necessary to increase the variance
contributions of some other interval. This tradeoff is fundamental as it cannot be avoided
by the choice of control.
By implication, minimizing a linear combination of the
variances of the elements of x t will involve trading off frequency specific variance
contributions. In other words, variance minimization implies that, even though overall
variance is reduced when one integrates across frequencies, for some frequencies, a
control that is optimal in this sense leads to greater variance.
ii. forward-looking systems
The law of motion (2) does not embody any direct role for expectations. We next
consider systems of the form
A0x t = βEt x t +1 + A (L ) x t −1 + B (L ) ut + εt .
10
(23)
This system is identical to (2) except for the addition of the expectational term β Et x t +1 .
Expectations are assumed to be rational. This means that the state variables will obey an
equilibrium moving average representation of the form
⎛ f1 (L ) f2 (L )⎞⎟
⎜
⎟⎟ w ,
x t = F C (L ) wt = ⎜⎜
⎜⎜⎝ f3 (L ) f4 (L )⎠⎟⎟ t
(24)
where wt are fundamental innovations.6 It is convenient to work with innovations that
are contemporaneously uncorrelated. Let vt = Vwt denote any orthogonalization of the
fundamental errors.
Then,
⎛g1 (L ) g 2 (L )⎞⎟
⎜
x t = F C (L )V −1vt = G C (L ) vt = ⎜⎜
⎟⎟ v .
⎜⎜⎝g 3 (L ) g 4 (L )⎠⎟⎟ t
(25)
We note that none of our results depend on the choice of orthogonalization.
As is well known, forward looking systems can exhibit multiple solutions. To
ensure uniqueness of the solution it is necessary to restrict the characteristic polynomial
det (A0z − β − z 2 (A (z ) + B (z ) F (z ))) . The following lemma formalizes this; while the
result is closely related to Whiteman (1983), the particular claim is new relative to that
work.
Lemma 2. Uniqueness of forward-looking solution
The system (23) has a unique square summable moving average solution in the space of
vt ’s when exactly two roots of the characteristic polynomial
det (A0z − β − z 2 (A (z ) + B (z ) F (z )))
6
(26)
A proof of uniqueness appears in the technical appendix. While related to Whiteman
(1983), the exact result appears to be new.
11
are inside the unit circle. If more than two roots are inside the unit circle a square
summable moving average solution in the space of vt ’s does not exist. If less than two
roots are inside the unit circle there exist multiple solutions.
Pf. See appendix.
The rational expectations assumption of course places structure on the individual
gi (L ) elements. For our purposes, what matters is that each gi (L ) may be written as a
ratio of finite polynomials with common denominator up to W (L ) ; see the technical
appendix for a proof that (25) may be written as
⎛gnC,1 (z ) gnC,2 (z )⎞⎟
⎜⎜
⎟⎟ .
G (z ) = C
⎜⎜ C
C
(
)
gd z ⎜⎝gn,3 (z ) gn,4 (z )⎠⎟⎟⎟
1
C
(27)
Here, the subscripts n and d refer to numerator and denominator. The denominator
polynomial gdC (L ) is the characteristic polynomial of the system; define gd as its zero
degree coefficient for later use. Given the assumption that policies are of the feedback
form, this coefficient cannot be influenced by the policy choice. Similarly, we define gn
as the coefficient on the zero degree of the polynomial gnC,1 (L ) gnC,4 (L ) − gnC,2 (L ) gnC,3 (L ) .
The form (27) together with the above definitions is useful because it allows us to prove
Theorem 3. Design limits on the MA polynomial in a forwards-looking MIMO
model
The moving average coefficients of a controlled system (23) must obey
∫
π
−π
(
2
)
log detG C (e −iω ) d ω = K w ,F ,
12
(28)
where
⎛
K w ,F = 4π ⎜⎜⎜log gnC − 2 log gd + ∑ log gnC,ui
⎜⎝
ui
⎞⎟
⎟⎟, i ∈ {ui } if gn ,i > 1 .
⎠⎟
(29)
In identifying restrictions on the sensitivity function for this system, we once
again define a system with no control, i.e.
A0x t = βEt x t +1 + A (L ) x t −1 + εt
(30)
and model the associated law of motion as
xt = G
NC
NC
⎛gnNC
⎞
⎜⎜ ,1 (z ) gn,2 (z )⎟⎟
(L ) vt = NC
⎟⎟ vt .
⎜
NC
( ) g
( )⎟
gd (z ) ⎜⎜⎝gnNC
⎟
n ,4 z ⎠
,3 z
1
(31)
The sensitivity function is defined by
−1
S (e −iω ) = G C (e −iω )G NC (e −iω )
(32)
so its determinant may be written
−1
det S (e -iω ) = detG C (e -iω ) detG NC (e -iω )
=
2
⎛ gC (e -iω ) gC (e -iω ) − gC (e -iω ) gC (e -iω )⎞⎛
⎞⎟
gdNC (e -iω )
⎟⎟ ⎜⎜
⎜⎜ n,1
n ,4
n ,2
n ,3
⎟⎟ =
⎟⎟ ⎜ NC -iω NC -iω
⎜⎜
-i ω
-i ω ⎟
NC
NC
-i ω 2
C
⎜
⎟
−
g
e
g
e
g
e
g
e
(
)
(
)
(
)
(
)
gd (e )
n ,4
n ,2
n ,3
⎝⎜
⎠⎝⎜ n ,1
⎠⎟
⎛ g NC (e -iω )2 ⎞⎟ ⎛ gC (e -iω ) gC (e -iω ) − gC (e -iω ) gC (e -iω ) ⎞
⎜⎜ d
⎟⎟
n ,4
n ,2
n ,3
⎟ ⎜ n,1
=
⎜⎜ C -iω 2 ⎟⎟ ⎜⎜ NC -iω NC -iω
NC
-i ω
NC
-i ω ⎟
⎟
⎜⎝ gd (e ) ⎠⎟ ⎜⎝ gn,1 (e ) gn,4 (e ) − gn ,2 (e ) gn ,3 (e )⎠⎟
2⎞
⎛ 2 d NC
-i ω
⎟⎟ ⎛⎜ gnC Πnj =C 1 (1 − gnC, je -iω ) ⎞⎟
⎜⎜ gd Π j =1 (1 − gdNC
e
)
,j
⎟⎟
⎟⎟ ⎜
⎜⎜
NC
-i ω ⎟
⎜⎜ g 2 ΠdC (1 − gC e -iω ) 2 ⎟⎟⎟ ⎝⎜⎜⎜ gnNC Πnj =1 (1 − gnNC
e
)⎠⎟
,j
d,j
⎝ d j =1
⎠
(
(
)
)
13
(33)
In the final line of (33), the first ratio also appears in the calculation of the constraints for
the sensitivity function of the backwards system as it is a ratio of simple polynomials
based on the poles of the controlled and the uncontrolled system. The second ratio
incorporates elements of the law of motion that did not affect the sensitivity function for
the backwards-looking case. The application of a control can affect the value of gnC as
well as the location of the zeros gnC, j .
In parallel with Theorem 2, (33) leads immediately to Theorem 4.
Theorem 4. Design limits on the sensitivity function in a forwards-looking MIMO
model
The sensitivity function of a controlled system (23) must obey
∫
π
−π
(
2
)
log det S (e −iω ) d ω = K F ,
(34)
where
⎛
K F = 4π ⎜⎜⎜log gnC − log gnNC + ∑ log gdNC
+ ∑ log gnC,ui − ∑ log gnNC
,vi
,ui
⎜⎝
vi
uC
uiNC
i
⎞⎟
⎟⎟,
⎠⎟
(35)
i ∈ {vi } if gdNC
> 1, i ∈ {uiC } if gnC,i > 1 and i ∈ {uiNC } if gnNC
,i
,i > 1.
From the perspective of design limits, there are several important differences
between this case and the backwards looking case.
First, in the presence of an expectational component, the sensitivity function
constraint K F can be negative. This means that it is possible for a control rule to reduce
all variance contributions relative to an uncontrolled system.
Second, expectations also affect the nature of the constraint value K F as the
terms associated with
∑ log g
uC
i
C
n ,ui
− ∑ log gnNC
,ui do not have an analog in the backwards
uiNC
14
looking case.
These terms are present when G (L ) is not invertible, so that the
fundamental innovations cannot be recovered from equilibrium realizations of the state
variables. Futia (1981) and Hansen and Sargent (1991) refer to this noninvertibility as
one where the equilibrium behavior of the state variables is non-revealing; the idea is that
the fundamental shocks to a system do not correspond to the structural innovations. This
additional constraint may thus be understood as arising from the fact that in a nonrevealing equilibrium, policymakers must employ feedback rules that are conditioned on
an information set that is coarser than the one that agents employ in making decisions.
We provide an example that shows how the application of a control can affect the value
of gnC as well as the location of the zeros gnC,i in Appendix II.
iii. SIMO systems
Our analysis has assumed that there are 2 distinct control variables to the policymaker.
There are important macroeconomic contexts where this is not the case. For example, a
standard question in the analysis of monetary policy rules concerns the effects of
different federal funds rate rules on inflation and unemployment, models of this type are
standard in Taylor (1999).
We call a 2 × 2 system MIMO if the policymaker can apply a control for each
state variable, we call a system SIMO if only one control variable is available to the
policymaker. To clarify this, consider the AR (1) specification of the forward looking
system (36) with A0 = I :
x t = β Et x t +1 + Ax t −1 + But + εt
(37)
⎛a1 a2 ⎞
A = ⎜⎜a a ⎟⎟⎟
⎟
⎜⎝ 3
4⎠
(38)
where
15
Under the MIMO assumption the application of a feedback rule ut = Fx t −1 is able to
change all the elements of the matrix A turning it into AM* ,
⎛a1* a2* ⎞⎟
⎜
⎟⎟
A = ⎜⎜ *
⎜⎜a a * ⎟⎟⎟
4⎠
⎝ 3
*
M
(39)
Under the SIMO assumption the application of a similar feedback rule can change only
the elements of one row of A turning it into AS* ,
⎛a1 a2 ⎞⎟
⎟
A = ⎜⎜⎜ *
*⎟.
⎜⎝a 3 a 4 ⎠⎟⎟
*
S
(40)
We divide the analysis in two parts: first we consider backward looking systems
( β = 0 ), then we generalize to forward looking systems ( β ≠ 0 ) (To be completed).
In the backward looking AR (1) case, the sensitivity matrix function is:
−1
S (L ) = (I − A*L ) (I − AL ) .
(41)
Substituting AM* and AS* in turn it is possible to show that
det S M (L ) =
det (I − AL )
det (I − A*L )
(1 − a1L )(1 − a 4L ) − a2a 3L2
=
(1 − a1*L )(1 − a 4*L ) − a2*a 3*L2
(42)
and
det SS (L ) =
det (I − AL )
det (I − A*L )
=
(1 − a1L )(1 − a 4L ) − a2a 3L2
.
(1 − a1L )(1 − a 4*L ) − a2a 3*L2
16
(43)
Therefore, as long as we evaluate design limits with respect to det (S (e −iω )) there is no
difference between a MIMO and a SIMO system in the backwards looking case. One has
to go deeper into the structure of the sensitivity function to identify an effect of the
number of states exceeding the number of controls.
In order to do this it is necessary to analyze how the sensitivity matrix turns the
uncontrolled spectral density matrix into the controlled spectral density matrix. A
fundamental difference between univariate and multivariate systems is that the control
applied to the latter allocates variances at different frequencies according to the
combination of spectra and cross-spectra of the uncontrolled processes. The difference
between a MIMO and a SIMO system in terms of design limits may be found at this finer
level of analysis.
Suppose that the spectral representation of the variance of the controlled state
variables is7
π
π
⎛ var (x 1 )⎞⎟ ⎛⎜σε2 ∫ fx ,ε |C (ω )d ω + σε2 ∫ fx ,ε |C (ω )d ω ⎞⎟⎟
1
1
1
2
⎜⎜
−π
−π 1 2
⎟⎟ = ⎜⎜
⎟⎟ .
⎜⎜
π
π
⎜
⎟
⎟
⎜⎝var (x 2 )⎠⎟⎟ ⎜⎜⎜σε21 ∫ fx2 ,ε1|C (ω )d ω + σε22 ∫ fx2 ,ε2 |C (ω )d ω ⎟⎟
⎝
⎠
−π
(44)
−π
Employing our definition of the sensitivity matrix it is possible to show (see Appendix)
that each spectral component in (44) can be written in terms of the spectral density matrix
components of the uncontrolled process as follows:
2
⎛ s e −iω 2 f
⎞⎟
) x1,ε1|NC (ω ) + s2 (e −iω ) fx2 ,ε1|NC (ω ) +
⎜⎜ 1 (
⎟⎟
fx1 ,ε1|C (ω ) =
⎟ .(45)
2 ⎜
⎜⎜
−i ω
−i ω
iω
iω
−i ω
sD (e ) ⎜⎝ s1 (e ) s2 (e ) fx1x2 ,ε1|NC (ω ) + s1 (e ) s2 (e ) fx2x1 ,ε1|NC (ω )⎠⎟⎟
1
2
This generalizes the univariate case fC (ω ) = S (e −iω ) fNC (ω ) . Basically, the application
of a feedback policy in a multivariate system shapes the spectral decomposition of the
driving process-specific component in each state variable as the weighted sum of three
7
Notice that a generalized objective function for the policy maker should be applied to a
variance-covariance matrix of the state variables. This is indeed the general approach,
taken from the control literature, of Hansen and Sargent (2005).
17
terms. The first term captures the contribution of the uncontrolled analogue of the
spectrum considered, the second term captures the contribution of the uncontrolled
spectrum of the remaining state variable and the third terms captures the effect of the
uncontrolled cross-spectra of the state variables involved. Underlying these three terms
there is a common effect of the control represented by the common denominator
2
sD (e −iω ) which, by the definition of the sensitivity matrix, corresponds to the
characteristic polynomial of the controlled system.
The multivariate version of the Bode constraint tells us that the choice of si (e −iω )
and sD (e −iω ) are constrained by:
K =
∫
π
−π
π
2
2
ln s1 (e −iω ) s 4 (e −iω ) − s2 (e −iω ) s 3 (e −iω ) d ω − 2∫ ln sD (e −iω ) d ω . (46)
−π
Given the definition of sensitivity matrix the term
∫
π
−π
2
ln sD (e −iω ) d ω is always
equal to zero as it corresponds to the determinant of the matrix solution of the controlled
system and the constraint can be rewritten as:
K =
∫
π
−π
2
ln s1 (e −iω ) s 4 (e −iω ) − s2 (e −iω ) s 3 (e −iω ) d ω .
(47)
The structure of each controlled spectra as presented in (45) prompts one to consider
2
tighter constraints of the same nature on terms such as s1 (e −iω ) . Indeed, part of the
difference between a MIMO and a SIMO system in terms of design limits is found at this
finer level of analysis.
To show this, we exploit the fact that a policymaker whose objective function is a
linear combination of the variances of the state variables will lead him to a “white noise
equivalent” policy, which means that we assume that the objective of the policy maker is
to convert the states to white noise. The specific form of the spectral density matrix for
the system (48) and (49) is
18
fX |NC (ω ) =
2
⎛
1 − a 4e −iω σε21 + a22σε22
1 ⎜⎜
⎜
d (ω ) ⎜⎜⎜(1 − a e iω )a e −iω σ 2 + (1 − a e −iω )a e iω σ 2
ε1
ε2
4
3
1
2
⎝
(50)
+ (1 − a1e iω )a2e −iω σε22 ⎞⎟⎟
⎟⎟
⎟⎟
−i ω 2 2
2 2
a 3 σε1 + 1 − a1e
σε2
⎟⎠
(1 − a 4e −iω )a 3e iω σε2
1
where
2
d (ω ) = (1 − a1e −iω )(1 − a 4e −iω ) − a2a 3e −2iω .
(51)
Assuming a MIMO system, it is possible to obtain a white noise spectral density matrix:
⎛σε2
⎜ 1
fX |C (ω ) = ⎜⎜
⎜⎜ 0
⎝
0 ⎞⎟
⎟⎟ ,
2 ⎟
σε2 ⎠⎟
(52)
by setting
⎛a1* a2* ⎞⎟ ⎛0 0⎞
⎜
⎟⎟
⎟⎟ = ⎜⎜
A = ⎜⎜ *
.
⎜⎜a a * ⎟⎟⎟ ⎝⎜⎜0 0⎠⎟⎟⎟
4⎠
⎝ 3
*
M
(53)
Now consider a SIMO system, in which a white noise spectral density matrix cannot be
generally be implemented. Suppose in continuity to the previous example, that the policy
maker chooses a control policy so that:
⎛a1 a2 ⎞⎟
⎟,
AS* = ⎜⎜⎜
⎜⎝ 0 0 ⎠⎟⎟
(54)
where we assume, in order for the controlled system to be stable, that a1 < 1 . Then,
under this policy, the spectral density matrix becomes
19
⎛ σε2 + a22σε2
⎜⎜ 1
2
⎜⎜ 1 − a e −iω 2
1
fX |C (ω ) = ⎜⎜⎜
i
⎜⎜ a2e ω σε2
2
⎜⎜
iω
⎜⎝ (1 − a1e )
a2e −iω σε22 ⎞⎟
⎟
(1 − a1e −iω )⎟⎟⎟⎟
⎟⎟ .
⎟⎟
⎟⎟
σε22
⎟
⎠⎟
(55)
A standard class of objective functions for linear systems assumes that the policymaker
cares only about the variances of the state variables which corresponds to being interested
only in the diagonal elements of the above matrix, so we focus on the diagonal elements
for now. If we compare the diagonal elements in (52) and (55) we can see that while the
lower-right component is white noise, the upper-left has a spectral density controlled by
the parameter a1 . This implies that for some frequencies the variance contribution is
reduced in comparison to the MIMO case (modulo the effect of the term a22σε22 ) and for
other frequencies the contribution is increased. However, overall the variance of the state
variable corresponding to the upper-left component is higher, in fact, for a1 < 1 :
2
2 2
σε21 + a22σε22
1 π σε1 + a2 σε2
dω =
> σε21 .
2
∫
−i ω 2
−
π
2π
(1 − a1 )
1 − a1e
(56)
Suppose now that, with the intent of driving the upper-left component towards a white
noise spectrum, the policy maker selects a 3* ≠ 0 . This choice immediately implies that
the lower-right component is no longer white noise and that a positive contribution is
added at all frequencies in reason of a 32σε21 .
As already remarked, this particular limitation of a SIMO system is not detected
by the general type of Bode constraints that we presented for backwards systems. This is
a consequence of the strong model independence of the Bode constraint metric in
backwards models, or, in other words, of the particular coarseness of such a metric. Let
the sensitivity matrix be defined as in (57) then we have (see Appendix):
2
s1 (e −iω ) = (1 − a1e −iω ) (1 − a 4*e −iω ) − a2*a 3e −2iω
20
2
(58)
2
2
2
2
s2 (e −iω ) = (1 − a 4e −iω )a2*e −iω − (1 − a 4*e −iω )a2e −iω
s 3 (e −iω ) = (1 − a1e −iω )a 3*e −iω − (1 − a1*e −iω )a 3e −iω
2
s 4 (e −iω ) = (1 − a1*e −iω )(1 − a 4e −iω ) − a2a 3*e −iω
(59)
(60)
2
(61)
Each of these terms couple with the common denominator sD (e −iω ) to shape the spectral
allocation for each component of the controlled spectral matrix according to expressions
like (45). We evaluate the four terms above according to the MIMO policy (53) and the
SIMO policy (54). This gives:
2
sM ,1 (e −iω ) = 1 − a1e −iω
2
2
sS ,1 (e −iω ) = (1 − a1e −iω ) − a2a 3e −2iω
2
sS ,2 (e −iω ) = a22a 42
2
sS ,3 (e −iω ) = a 32 1 − a1e −iω
2
sM ,2 (e −iω ) = a22
2
sM ,3 (e −iω ) = a 32
2
sM ,4 (e −iω ) = 1 − a 4e −iω
2
2
2
2
(62)
2
sS ,4 (e −iω ) = 1 − a1e −iω 1 − a 4e −iω
2
If we apply the Bode metric to each of these elements, recalling that a1 < 1 by
2
assumption, then there does exist a difference in the constraint on sS ,1 (e −iω ) and
2
sS ,2 (e −iω ) with respect to their MIMO analogues. The difference on the latter term is
directly related to a 4 while the difference in the former is more subtle and it depends on
the location of the zeros of the polynomial
1 − a1z − a2a 3z 2 .
21
(63)
It is not difficult to find values for a2 and a 3 , even under the assumption that a2a 3 < 1 ,
such that at least one zero of the polynomial (63) is inside the unit circle, which results in
an eigenvalues outside the unit circle and thus a Bode metric different from zero. Under
these circumstances one has:
∫
π
−π
(
2
)
ln sS ,1 (e −iω ) d ω >
∫
π
−π
(
2
)
ln sM ,1 (e −iω ) d ω = 0
(64)
which captures the tighter constraint that a SIMO system entails on the spectral density
matrix, exemplified by the difference between (52) and (55). Notice that the difference in
sensitivity constraints between a MIMO and a SIMO is driven mostly by the value of the
uncontrolled coefficients that are controllable by the policy maker, i.e. a 3 and a 4 .
In general, the Bode metric applied element-wise to the sensitivity matrix of a
SIMO system delivers constraint values that are greater or equal to the analogue values of
a MIMO system. The reason is that the fact that there are fewer controls than states
means that there are additional constraints on the individual elements of the
matrix S (e −iω ) in addition to the overall Bode constraint.
3. Examples
In this section we give some simple SISO examples of the way in which frequency
tradeoffs appear in controlled systems.
i. Backwards looking System
Consider
x t = ax t −1 + but −1 + εt
with εt white noise . When there is no control, then
22
(65)
fNC (ω ) =
σε2
.
2π (1 − 2ρ cos ω + ρ 2 )
(66)
σε2
2π
(67)
For a variance minimizing control
fNC (ω ) =
as all temporal dependence is eliminated. For our purposes what matters is that there
must exist a ω (which depends on a) such that
fNC (ω ) =
σε2
σε2
if ω > ω
<
2π (1 − 2ρ cos ω + ρ 2 ) 2π
(68)
so complete stabilization has frequency-specific costs.
ii. Forward looking system: AR(1) and εt i.i.d.
Consider the forward looking system:
x t = β Et x t +1 + αx t −1 + but −1 + εt .
(69)
In absence of control the solution of this system when α ≠ 0 is
x t = Hx t −1 +
H
εt
α
(70)
where H < 1 and:
H =2
α
.
1 + 1 − 4βα
23
(71)
The spectrum of this system is:
fNC (ω ) =
H2
σw2
.
α2 2π (1 + H 2 − 2H cos ω )
(72)
Suppose that an optimal (i.e. variance minimizing) control is applied and implicitly
defined by α * where αx t −1 + but −1 = α *x t −1 , then the controlled spectrum is
fC (ω ) =
H *2
σw2
.
α *2 2π (1 + H *2 − 2H * cos ω )
(73)
A negative Bode constraint corresponds to the possibility that:
fC (ω ) < fNC (ω ) ∀ω
(74)
H2
Notice that, the term 2 is monotonically increasing in α . This means that for α * < α :
α
H *2
H2
.
<
α *2
α2
(75)
One may show that this means that the difference between the spectral densities
σw2
σw2
−
2
2π (1 + H *2 − 2H * cos ω ) 2π (1 + H − 2H cos ω )
(76)
is maximal at ω = {π, −π} and equals
1
(1 + H )
* 2
−
1
2 > 0.
(1 + H )
24
(77)
A sufficient condition for a reduction of variance at all frequencies is therefore
H *2
2
α *2 (1 + H * )
−
H2
2 < 0.
a 2 (1 + H )
(78)
Solving the optimal feedback rule explicitly gives
α* =
1 − 1 + 8 β 2 − 4β 2
.
8β
(79)
1 − 1 + 8β 2
<0.
4β
(80)
Since α* < 0
H* =
H *2
Suppose β = 0.9 , then H = −0.48 and *2 = 0.49 which implies a variance:
α
*
σw2
Ex = 0.63
2π
2
t
(81)
Further, suppose that α = 0.2 , then the optimal policy corresponds a reduction at all
frequencies if
1.78 <
H2
2 = 1.16 .
α 2 (1 + H )
(82)
Under the current parameterization, for values of α such that the solution to the system is
unique, condition this cannot be realized. Hence the optimal rule requires frequencyspecific tradeoffs.
In contrast, consider the alternative sub-optimal policy αˆ = −0.1 . In this case,
25
Hˆ 2
2
(−0.1) (1 + Hˆ )
2
H2
= 1.03 < 1.07 =
2 ,
0.22 (1 + H )
(83)
which implies that the controlled spectral density is smaller than the uncontrolled one at
all frequencies. Therefore, while it is possible in principle to reduce the variance
contribution at all frequencies, if the policy maker cares about the overall variance, such a
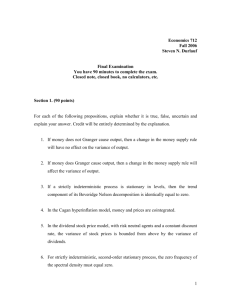
policy might not be optimal. The various cases are illustrated in Figure 1.
26
0.75
0.625
0.5
0.375
0.25
0.125
0
0
0.5
1
1.5
2
Figure 1: Spectral Densities for Uncontrolled System ( α
2.5
3
= 0.2 ), Optimally Controlled System
(thick line), White Noise (dashed line), Generalized Frequency Reduction Control (gray line)
27
In terms of our notation for the multivariate case, the solution to the univariate
uncontrolled system can be written as:
x tC = gnC
1
wt
g (1 − gdC,1L )
C
d
(84)
where
gnC =
H*
, gdC,1 = H *, gdC = 1 .
*
α
(85)
From the formula for the design limits in forward looking system given in Theorem 3,
K w ,F = 4π (log gnC
)
= 4π (log H * − log α * ).
(86)
Notice that the term K w ,F depends on the difference between the autoregressive part of
the reduced form representation H * (closed loop) and the autoregressive part of the
structural representation log α * (open loop). Using the parameterization of our example
one has K wC,F = −4.53 . Similarly, under free dynamics one has K wNC
,F = 3.37 . Finally,
the Bode constraint from Theorem 4 is:
K FC = K wC,F − K wNC
,F = −7.90 .
ˆ
(87)
The negative values of K FC and K FC are evidence that the system is subjected to a less
stringent constraint compared to the backward looking case.
28
4. Application: Taylor rules
In this section we consider some frequency domain properties of Taylor rules.
i. forward looking models
First, we study of forward looking New-Keynesian model, following the example
studied in Levin and Williams (2003); the model they study is closed by a feedback
simple Taylor rule it = gπ π t −1 + g y yt −1 , where i denotes the nominal interest rate, π
denotes inflation and y denotes the output gap. The estimated model is
0
⎛ 1 −0.096 ⎞ ⎛ π t ⎞ ⎛ .99 0 ⎞ ⎛ π t +1 ⎞ ⎛
=
+
E
⎜
⎟
⎜
⎟⎜ ⎟ ⎜
⎟ t⎜
1 ⎠ ⎝ yt ⎠ ⎝1.59 1 ⎠ ⎝ yt +1 ⎠ ⎝ −1.59 gπ
⎝0
⎞ ⎛ π t −1 ⎞ ⎛ 1 0 ⎞ ⎛ v1t ⎞
(88)
+
⎟
−1.59 g y ⎠ ⎜⎝ yt −1 ⎟⎠ ⎜⎝ 0 1 ⎟⎠ ⎜⎝ v2t ⎟⎠
0
Under the original Taylor rule ( gπ = 1.5 , g y = 0.5 ) one can show that the
spectral densities for inflation and the output gap are
fπ ( ω ) =
σ ε2
2π
1
⎛ 1.53 ⎞ 1 + ( 0.52 ) + 2*0.52*cos ω σ ε 2
+
⎜
⎟
2
⎝ 1.78 ⎠ 1 + ( 0.57 ) + 2*0.57 *cos ω 2π
2
2
2
2
1
⎛ 0.066 ⎞
⎜
⎟
2
⎝ 1.78 ⎠ 1 + ( 0.57 ) + 2*0.57 *cos ω
(89)
and
f y (ω ) =
σ ε2
2π
1
2
2
2
2
(90)
1
⎛ 1.60 ⎞ 1 + (1.49 ) + 2*1.49*cos ω σ ε 2 ⎛ 1.088 ⎞
−
+
⎜
⎟
⎜
⎟
2
2
⎝ 1.78 ⎠ 1 + ( 0.57 ) + 2*0.57 *cos ω 2π ⎝ 1.78 ⎠ 1 + ( 0.57 ) + 2*0.57 *cos ω
29
We fix σ ε21 = 1 and σ ε22 = 1.5 for convenience when constructing figures for the spectral
densities. (what matters is the ratio of the two disturbances). We study next the solution
to (1) under free dynamics: gπ = 0 and g y = 0 , which leads to the spectral densities
σ ε2 σ ε2
2
fπ ( ω ) =
+
( 0.096 )
2π 2π
(91)
σ ε2
f y (ω ) =
2π
(92)
1
2
and
2
Note that these solutions are both white noise; this follows from the fact that the model is
purely forward looking as well as they way we eliminate the possibility of multiple
solutions (described in the Appendix)8.
The inflation and output gap spectra under free dynamics together with the
controlled spectra under the original Taylor rule are reported in Figure 2.
8
We are exploring how our findings change when other assumptions are used to achieve
uniqueness.
30
0.625
0.5
0.375
0.25
0.125
0
0
0.5
1
1.5
2
2.5
3
Figure 2: Normalized Spectral Density for Output Gap (thick line) and Inflation
Gray lines are the respective densities under free dynamics.
Consistent with the examples in Section 3, the controlled process features a form of
negative autoregression which allows the policy maker to exploit the information that
agents embed into their expectations. This effect of the original Taylor rule on the
volatility of inflation and output may be rationalized by an objective function that gives
most of the weight to inflation volatility rather than output gap volatility.
We consider next a policy rule that has been proposed by Levin and Williams
(2003) as optimal when both output gap volatility and change in interest rate enter
together with inflation the policy maker objective function, this rule is: gπ = 1.3 and
g y = 0.9 .
31
0.625
0.5
0.375
0.25
0.125
0
0
0.5
1
1.5
2
2.5
3
Figure 3: Normalized Spectral Density for Output Gap (thick line) and Inflation under the rule
( gπ = 1.3 and g y = 0.9 ). Gray lines are the respective densities under free dynamics.
32
The policy rule of Figure 3 is optimal when output gap volatility is regarded as important
by the policy maker. In fact, the contribution to output gap volatility is reduced at low
frequencies. However, it is increased markedly at higher frequencies, this happens in
order to reduce the variance contribution for inflation almost at all frequencies.
ii. Backwards looking models
The next model we consider is a pure backwards looking model estimated by
Rudebusch and Svensson (1997)
⎛πt ⎞
⎜ ⎟=
⎝ yt ⎠
⎛
0.70 − 0.1L + 0.28 L2 + 0.12 L3
⎜
⎜
2
3
2
3
⎜ −0.10*0.25 (1 + L + L + L ) 0.25 (1 + L + L + L ) gπ − 1
⎝
⎛ 1 0 ⎞ ⎛ v1t ⎞
+⎜
⎟⎜ ⎟
⎝ 0 1 ⎠ ⎝ v2t ⎠
(93)
(
)
⎞
⎟ ⎛ π t −1 ⎞
1.16 − 0.25 L
⎟⎜
⎟
⎝ yt −1 ⎠
2
3
⎟
−0.10*0.25 (1 + L + L + L ) g y ⎠
0.14
with var ( v1t ) = 1.018 and var ( v2t ) = 0.671 (see Rudebusch and Svensson, 1997, page
208). The solution of this system under the rule ( gπ = 5.1 , g y = 1.9 ) is:
⎛ 1 − 1.1L + 0.3L2 + 0.047 L3 + 0.048 L4
⎞
0.14 L
⎟
1 ⎜
2
3
4
D ( L) =
−0.0069 L − 0.039 L − 0.071L − 0.1L
⎜
2
3
4⎟
d ( L) ⎜
1 − 0.7 L + 0.1L − 0.28L − 0.12 L ⎟
5
6
7
⎝ −0.096 L − 0.064 L − 0.032 L
⎠
where
d ( L ) = 1 − 1.8 L + 1.2 L2 − 0.55 L3 + 0.25 L4 + 0.036 L5 − 0.031L6 − 0.01L7 − 0.0012 L8
33
The finiteness of variance of the system is entirely determined by the roots of this
polynomial. Under the policy rule the nine roots are
z1 = −3.61 + 4.05i, z2 = −3.61 − 4.05i
z3 = −4.81
z4 = −0.01 + 1.60i, z5 = −0.01 − 1.60i,
z6 = 1.63
z7 = 1.14 + 0.27i, z8 = 1.14 − 0.27i
The moduli of these roots is always bigger than one, making the system one of finite
variance. Under the free-dynamics specification ( gπ = 0.0 , g y = 0.0 ) the solution is:
⎛
⎞
1 − 1.2 L + 0.25 L2
0.14 L
DF ( L ) =
⎜
2
3
4
2
3
4⎟
d F ( L ) ⎝ −0.025 L − 0.025 L − 0.025 L − 0.025 L 1 − 0.7 L + 0.1L − 0.28L − 0.12 L ⎠
1
and the roots of the polynomial d F ( z ) are:
z1 = −3.35, z2 = 3.34
z3 = 0.0010 + 1.59i, z4 = 0.0010 − 1.59i
z5 = 1.25, z6 = 0.95
We notice that the system under free dynamics features a zero inside the unit circle
( z6 = 0.95 ), which signals that the variance is not finite. Any good control rule will try to
eliminate such an unstable zero. However, the multivariate Bode constraint (make
reference here to the result in the paper) tells us that such an elimination has a price, i.e.
the variance contribution is likely to be high at some frequency ranges. To see this we
can plot the spectral densities for inflation and output under the optimal policy in the
form of a Taylor rule. Under free dynamics, given the roots inside the unit circle, a
spectral representation does not exist. We consider two rules of a set of optimal rules
suggested by Levin and Williams (2003): gπ = 5.1 , g y = 1.9 and gπ = 3.4 , g y = 2.5
where for the Rudebusch-Svensson model
34
it = gπ
1
1 + L + L2 + L3 ) π t + g y yt
(
4
(94)
The first rule is optimal when the policy maker does not attach any loss to the volatility
of output gap but she cares only about inflation. On the other hand, the second rule is
optimal when the policy maker gives equal weights to the volatility of inflation and
output gap in her loss function. Our calculations show that both policy strategies are able
to remove the unstable eigenvalues from the system; however, they do so by creating a
strong periodicity of output gap (the first rule also in inflation) at business cycle
frequencies (2-8 years). This is a clear example that, given the existence of fundamental
limits in designing control policies to a stochastic system, restricting attention to the
overall unconditional variance of the state variables can overlook important frequencyspecific effects of optimal policies.
12
10
8
6
4
2
0
0
0.5
1
1.5
2
2.5
3
Figure 4: Normalized Spectral Density of Output Gap (Thick line) and Inflation for RudebushSvensson Backward Looking Model under Taylor Rule ( gπ = 5.1 and g y = 1.9 ). Dashed line is
white noise spectrum under zero persistence in both processes.
35
Figure 4 shows that although the policy rule succeeds in making the system stable, it
creates a strong business cycle of medium-low frequency which might be undesirable to
the policy maker. Figure 5 shows the same result for the second policy rule we are
considering: as one would expect, the magnitude of the business cycle in output is
reduced but it is still distinctly present, whereas inflation is now a very persistent process.
12
10
8
6
4
2
0
0.5
1
1.5
2
2.5
3
Figure 5: Normalized Spectral Density of Output Gap (Thick line) and Inflation for RudebuschSvensson Backward Looking Model under Taylor Rule ( gπ = 3.4 and g y = 2.5 ). Dashed line is
white noise spectrum under zero persistence in both processes.
36
Comparing Figure 4 to Figure 5 seems interesting because in the first case the policy
maker is concerned with output gap only because inflation depends on it. On the other
hand, when the volatility of output gap becomes directly relevant in the policy maker
objective, the peak in the spectrum is reduced but this implies the acceptance of a very
persistence process for inflation, compared to Figure 4. Finally, Figure 6 shows the same
calculations under the original Taylor rule. Notice that the variance of inflation under the
original Taylor rule is smaller than the variance of inflation under the optimal rule of
Figure 4. This fact is a consequence of considering the variance of the change in the
interest rate when evaluating the optimality of the a policy rule (as Levin and Willimas
(2003) do). Since the process for the interest rate inherits the properties of the process for
output gap and inflation, the change in interest rate will be more volatile when these two
processes have a spectral densities more distributed across the frequency range. Both the
processes for inflation and output are more persistent under the optimal rule of Figure 4
than under the original Taylor rule of Figure 6 implying that the change in interest rate is
less volatile in the former case, thereby determining the optimality of that rule over the
Taylor rule.
37
12
10
8
6
4
2
0
0.5
1
1.5
2
2.5
3
Figure 6: Normalized Spectral Density of Output Gap (Thick line) and Inflation for RudebuschSvensson Backward Looking Model under Original Taylor Rule ( gπ = 1.5 and g y = 0.5 ). Dashed
line is white noise spectrum under zero persistence in both processes.
iii. hybrid models
TO BE COMPLETED
5. Summary and conclusions
TO BE COMPLETED
38
Appendix I. Proofs and Derivations
Proof of lemma 1
Elementary calculations show that
2
e iω − r = 1 − 2 r cos (ω − θ ) + r 2
(95)
where θ = arg (r ) . Taking logs and integrating both sides of (95),
π
∫
−π
2
log e iω − r d ω =
∫
π
−π
log (1 − 2 r cos (ω − θ ) + r 2 )d ω .
(96)
Focusing on the right hand side of (96), it is apparent that the integral is a periodic
function with period 2π , so
∫
π
−π
log (1 − 2 r cos (ω − θ ) + r 2 )d ω =
∫
π
−π
log (1 − 2 r cos ω + r 2 )d ω .
(97)
From Gradeshtyn and Ryzhik (1965),
∫
π
−π
log (a + b cos ω )d ω =2π log
a + a 2 + b2
,
2
(98)
which means that (96) and (97) imply that
∫
π
−π
2
iω
2
log e − r d ω = 2π log
1 + r 2 + (1 + r 2 ) − 4 r 2
2
1 + r + (1 − r )
2
= 2π
2
2
39
.
(99)
Therefore, if r ≤ 1 ,
∫
π
−π
1 + r 2 + (1 − r 2 )
= 0.
2
(100)
1 + r 2 −1 + r 2
= 2π log r 2
2
(101)
2
log e iω − r d ω = 2π log
Whereas if r > 1 ,
∫
π
−π
2
log e iω − r d ω = 2π log
which is the required result.
Proof of Theorem 1
From the description of the system,
det D (e
−i ω
)=
detW (e −iω )
det (A0 − A (e −iω )e −iω )
1
det (A0 ) Π
m
i =1
(1 − λie −iω )
Therefore,
40
w
=
Πwi =MA1 (1 − wie −iω )
Πwi =AR1 (1 − ρie −iω )
(102)
.
∫
π
−π
(
2
)
log det D (e −iω ) d ω =
∫
π
−π
log
1
det (A0 ) Πmi =1 (1 − λie −iω )
w
Πwi =MA1 (1 − wie −iω )
Πiw=AR1 (1 − ρie −iω )
2
dω =
2
⎛
Πwi =MA1 e iω − wi ⎞⎟⎟
1
⎜⎜
2
∫−π log ⎜⎜⎜ det (A )2 Πm eiω − λ 2 w ΠwAR eiω − ρ 2 ⎟⎟⎟d ω =
⎝
⎠
0
i =1
i
i =1
i
π
n
π
wAR
π
wMA
π
−∑ ∫ log e − λi d ω − 4π log det (A0 ) + 4π log w + ∑ ∫ log e − wi d ω − ∑ ∫ log e iω − ρi d ω
2
iω
−π
i =1
i =1
2
iω
−π
i =1
(103)
π
∫
From Lemma 1,
2
−π
e iω − r d ω = 0 if r < 1 . We have assumed that the driving
process is second order stationary which means that ρi < 1. Hence the last terms in
n
(103)
are
0.
The
terms
of
interest
are
∑∫
i =1
wAR
∑∫
i =1
π
−π
π
−π
2
log e iω − λi d ω
and
2
log e iω − wi d ω . Concerning the former, the λi ’s are the eigenvalues of the
system. When a control is applied to a system it seems desirable to eliminate any unstable
eigenvalues,
n
∑∫
i =1
π
−π
which
means
that
λi < 0 ∀i .
From
Lemma
1
this
means
2
log e iω − λi d ω = 0 . However, when we evaluate the expression for
uncontrolled systems, unstable eigenvalues cannot be ruled out, which means that
n
∑∫
π
−π
i =1
log e iω − λi d ω = 4π ∑ log λvi i ∈ {vi } if λi > 1
2
vi
wAR
Consider now the latter term.
∑∫
π
−π
i =1
2
log e iω − wi d ω . As already noticed, we allow for
wi > 1 , therefore we have
wAR
∑∫
i =1
π
−π
log e iω − wi d ω = 4π ∑ log wui
2
ui
41
i ∈ {ui } if wi > 1
−π
2
which verifies the theorem. Notice that this last term does not change when a control is
applied to an uncontrolled system, and in fact, theorem 2 makes clear that the structure of
the driving process does not affect the constraint on the sensitivity function in backwards
looking models. What do matter for the constraint are the unstable eigenvalues of the
uncontrolled system: as the feedback control must be designed in order to stabilize the
system, the freedom in allocating the variance at different frequencies is reduced.
Proof of Lemma 2
Since x t = G (L ) vt , and vt maps 1 to 1 with wt , the Wiener-Kolmogorov prediction
formula implies that
Et x t +1 = L−1 (G (L ) − G 0 ) vt
(104)
which, given eq. (104), means that
G (L )(A0 − L−1β − (A (L ) − B (L )U (L )) L ) vt = (−L−1βG 0 + V (L )) vt
(105)
Taking z -transforms,
G (z ) =
adj (zA0 − β − (A (z ) − B (z )U (z )) z 2 )
det (zA0 − β − (A (z ) − B (z )U (z )) z 2 )
⎛ β1
Recall that the specific forms of β and G0 are β = ⎜⎜⎜
⎜⎝β3
respectively.
(−βG0 + zV (z ))
β2 ⎞⎟
⎟⎟
β4 ⎠⎟⎟
⎛g 0,1
and G0 = ⎜⎜g
⎜⎝ 0,3
(106)
g 0,2 ⎞
⎟
g 0,4 ⎠⎟⎟⎟
The term (−βG 0 + zV (z )) on the right hand side therefore may be
rewritten
42
⎛ β1g 0,1 + β2g 0,3 − zv1 (z ) β1g 0,2 + β2g 0,4 − zv2 (z )⎞⎟
⎟⎟
−βG0 + zV (z ) = − ⎜⎜⎜
⎜⎝β3g 0,1 + β4g 0,3 − zv 3 (z ) β3g 0,2 + β4g 0,4 − zv 4 (z )⎠⎟⎟
(107)
The solution G (L ) is thus determined up to the elements in G 0 . Following Whiteman
(1983) we use the requirement of analyticity for each term in G (z ) as a set of extra
conditions for uniqueness. Define
⎛J 1 (z ) J 2 (z )⎞⎟
−adj (zA0 − β − (A (z ) − B (z )U (z )) z 2 ) = ⎜⎜⎜
⎟⎟
⎜⎝J 3 (z ) J 4 (z )⎠⎟⎟
(108)
J (z ) = det (zA0 − β − (A (z ) − B (z )U (z )) z 2 )
(109)
and
Note that under our assumptions, each term J i (z ) is a finite degree polynomial. The
candidate solution can be then written as:
G (z )
β1g 0,1 + β2g 0,3 − zv1 (z ) β1g 0,2 + β2g 0,4 − zv2 (z )⎞⎟
1 ⎛⎜J 1 (z ) J 2 (z )⎞⎛
⎟
⎜
⎟
⎟⎟ (110)
⎜
=
⎟⎟ ⎜⎜
J (z ) ⎜⎝⎜J 3 (z ) J 4 (z )⎠⎝
⎟⎜β3g 0,1 + β4g 0,3 − zv3 (z ) β3g 0,2 + β4g 0,4 − zv4 (z )⎠⎟⎟
The conditions for uniqueness corresponds to each numerator term in this matrix to
become zero at the unstable poles of the denominator (zeros inside the unit circle) that we
denote by z . Each z provides the associated set of equations:
J 1 (z )(β1g 0,1 + β2g 0,3 − zv1 (z )) + J 2 (z )(β3g 0,1 + β4g 0,3 − zv 3 (z )) = 0
J 3 (z )(β1g 0,1 + β2g 0,3 − zv1 (z )) + J 4 (z )(β3g 0,1 + β4g 0,3 − zv 3 (z )) = 0
J 1 (z )(β1g 0,2 + β2g 0,4 − zv2 (z )) + J 2 (z )(β3g 0,2 + β4g 0,4 − zv 4 (z )) = 0
J 3 (z )(β1g 0,2 + β2g 0,4 − zv2 (z )) + J 4 (z )(β3g 0,2 + β4g 0,4 − zv 4 (z )) = 0
43
(111)
These four equations are actually two blocks of two equations (first and third, second and
fourth) that can be solved independently for g 01 , g 03 and g 02 , g 04 respectively. To see this
we focus on the first block which can be written as:
⎛J 1 (z ) β1 + J 2 (z ) β3 J 1 (z ) β2 + J 2 (z ) β4 ⎞⎟ ⎛g 0,1 ⎞ ⎛J 1 (z ) zv1 (z ) + J 2 (z ) zv 3 (z )⎞⎟
⎜
⎟⎜ ⎟ ⎜
⎟
⎜⎜⎜J (z ) β + J (z ) β J (z ) β + J (z ) β ⎟⎟ ⎜⎜g 0,3 ⎟⎟⎟ = ⎜⎜⎜J (z ) zv (z ) + J (z ) zv (z )⎟⎟ (112)
⎟
⎟
⎝
⎠
1
4
3
3
2
4
4⎠
1
4
3
⎝ 3
⎝ 3
⎠
from which it is evident that
J 1 (z ) β1 + J 2 (z ) β3
J 1 (z ) β2 + J 2 (z ) β4
J 3 (z ) β1 + J 4 (z ) β3 J 3 (z ) β2 + J 4 (z ) β4
=0
(113)
In order to have a unique solution for this block system it is therefore necessary to have
two zeros inside the unit circle. When this holds, the two equations in two unknowns are
⎛J 1 (z 1 ) β1 + J 2 (z 1 ) β3 J 1 (z 1 ) β2 + J 2 (z 1 ) β4 ⎞⎟ ⎛g 0,1 ⎞
⎜⎜
⎟⎟ ⎜⎜ ⎟⎟ =
⎜⎜
⎟
⎟
⎜⎝J 1 (z 2 ) β1 + J 2 (z 2 ) β3 J 1 (z 2 ) β2 + J 2 (z 2 ) β4 ⎠⎟ ⎜⎝g 0,3 ⎠⎟
⎛ J 1 (z 1 ) z 1v1 (z 1 ) + J 2 (z 1 ) z 1v 3 (z 1 ) ⎞⎟
⎜⎜
⎟⎟
⎜⎜
⎟⎟
+
J
z
z
v
z
J
z
z
v
z
(
)
(
)
(
)
(
)
⎜⎝ 1 2 2 1 2
1
2
2 3
2 ⎠
(114)
which identify a unique solution for g 01 and g 03 . The solution method for g 02 and g 04 is
identical.
Derivation of Equation (27)
Let
det (zA0 − β − (A (z ) − B (z )U (z )) z 2 ) = gd (z ) .
44
(115)
We denote the determinant by gd (z ) to stress that the cancellation of unstable roots that
allows the uniqueness of the solution has not yet been considered. The solution matrix
can thus be written as
⎛J 1 (z ) J 2 (z )⎞⎛
β1g 0,1 + β2g 0,3 − zv1 (z ) β1g 0,2 + β2g 0,4 − zv2 (z )⎞⎟
⎟
⎜
⎜
⎟
⎜
G (z ) =
⎟⎜
⎟⎟ (116)
gd (z ) ⎜⎝⎜J 3 (z ) J 4 (z )⎠⎝
⎟⎟⎜⎜β3g 0,1 + β4g 0,3 − zv3 (z ) β3g 0,2 + β4g 0,4 − zv4 (z )⎠⎟⎟
1
Each of the four still-undefined constants in the second matrix on the right hand side are
then chosen in order to make G (z ) analytic inside the unit circle. Once the constants
have been chosen it is possible to write each term of G (L ) as having a common
denominator whose zeros are all outside the unit circle, we denote it by gd (z ) ; as
noticed, this is true conditional on the structure of V (L ) , a statement which now we
clarify.
Recalling that the W (L ) , has the form (4) it must be the case that for V (L )
⎛ vn,1 (L ) vn ,2 (L )⎞⎟
⎜
⎟
⎛v1 (L ) v2 (L )⎞⎟ ⎜⎜⎜ v (L ) v (L ) ⎟⎟
d ,1
d ,2
⎜⎜
⎟⎟
V (L ) = ⎜
,
⎟⎟ = ⎜⎜
⎜⎜⎝v3 (L ) v 4 (L )⎠⎟⎟ ⎜⎜ vn,3 (L ) vn,4 (L )⎟⎟⎟
⎟⎟
⎜⎜
⎜⎝ vd ,3 (L ) vd ,4 (L )⎠⎟⎟
(117)
where the numerator polynomials are defined so that:
vi (L ) =
vin (L )
=
vie (L )
vin (L )
ki
∏(1 − v L )
.
(118)
d
i, j
j =1
The terms in the second matrix of the solution matrix will be of the form
β1g 0,1 + β2g 0,3 − z
vn,1 (L )
vd ,1 (L )
=
vd ,1 (L )(β1g 0,1 + β2g 0,3 ) − zvn,1 (L )
vd ,1 (L )
45
≡
vˆn,1 (L )
vd ,1 (L )
. (119)
It follows that the form of the solution matrix is
G (z ) =
1 ⎛⎜J 1 (z )
⎜
gd (z ) ⎜⎜⎝J 3 (z )
⎛ vˆn ,1 (z ) vˆn ,2 (z ) ⎞⎟
⎜
⎟
J 2 (z )⎞⎟ ⎜⎜⎜ vd ,1 (z ) vd ,2 (z ) ⎟⎟
⎟
⎟⎟⎜⎜
⎟
J 4 (z )⎠⎟⎟ ⎜⎜ vˆn ,3 (z ) vˆn ,4 (z )⎟⎟⎟
⎟⎟
⎜⎜
⎜⎝ vd ,3 (z ) vd ,4 (z ) ⎠⎟
⎛
ˆ ( )
ˆ ( )
⎜⎜J 1 (z ) vn ,1 z + J 2 (z ) vn ,3 z
vd ,1 (z )
vd ,3 (z )
1 ⎜⎜⎜
=
⎜⎜
vˆ (z )
vˆ (z )
gd (z ) ⎜
⎜⎜J 3 (z ) n ,1
+ J 4 (z ) n ,3
⎜⎝
vd ,3 (z )
vd ,1 (z )
⎛
g1n (z )
⎜⎜
1 ⎜⎜⎜ vd ,1 (z ) vd ,3 (z )
=
⎜
gn3 (z )
gd (z ) ⎜⎜
⎜⎜
⎝ vd ,1 (z ) vd ,3 (z )
⎛ gn ,1 (z )
⎜⎜
1 ⎜⎜ vd ,1 (z ) vd ,3 (z )
⎜
=
gd (z ) ⎜⎜⎜ gn ,3 (z )
⎜⎜ ( ) ( )
⎝ vd ,1 z vd ,3 z
vˆn ,4 (z ) ⎞⎟
⎟
vd ,2 (z )
vd ,4 (z ) ⎟⎟⎟
⎟
vˆn ,2 (z )
vˆn ,4 (z )⎟⎟⎟
⎟⎟
J 3 (z )
+ J 4 (z )
vd ,2 (z )
vd ,4 (z ) ⎠⎟
⎞⎟
g2n (z )
⎟
vd ,2 (z ) vd ,4 (z )⎟⎟⎟
⎟⎟⎟
gn4 (z )
⎟⎟
(
)
(
)
vd ,2 z vd ,4 z ⎠⎟⎟
gn ,2 (z ) ⎞
⎟⎟
vd ,2 (z ) vd ,4 (z )⎟⎟⎟
⎟
gn ,4 (z ) ⎟⎟
⎟⎟
(120)
v (z ) v (z )⎠⎟⎟
J 1 (z )
d ,2
vˆn ,2 (z )
+ J 2 (z )
d ,4
The first step is just matrix multiplication, the second step defines the numerators
of each term as gn ,i (z ) since the free parameters are not pinned down yet; the last step
applies the requirements for the uniqueness of a solution by choosing the free parameters
so as to cancel the zeros of the common denominator gd (z ) inside the unit circle with the
zeros of each numerator gn ,i (z ) . Since the disturbance process is assumed stationary,
each of the terms vd ,i (z ) have all their zeros outside the unit circle and therefore they do
not play any direct active role in the value of the Bode constraint. They of course play a
more subtle role as the zeros (possibly inside the unit circle) of the terms gn ,i (z ) will
depend on them too. The last line of the above equation clarifies the statement that the
solution G (z ) , for the purpose of applying the Wu-Jonckheere results, can be written as
46
G (z ) =
⎛gn ,1 (z ) gn ,2 (z )⎞⎟
⎜⎜
⎟
gd (z ) ⎜⎝gn ,3 (z ) gn ,4 (z )⎠⎟⎟
1
(121)
conditional on the autoregressive structure of V (L) summarized by the polynomial
vd ,1 (z ) vd ,3 (z ) vd ,2 (z ) vd ,4 (z ) . In fact, notice that
gn ,2 (z ) ⎞⎤
⎡
⎛ gn ,1 (z )
⎟⎟⎥
⎜⎜
⎢
⎢ 1 ⎜⎜ vd ,1 (z ) vd ,3 (z ) vd ,2 (z ) vd ,4 (z )⎟⎟⎥
⎜⎜
det ⎢⎢
⎟⎟⎟⎥⎥ =
(
)
(
)
g
z
g
z
(
)
⎜
⎟⎟⎥
n ,3
n ,4
⎢ gd z ⎜⎜
⎢
⎜⎝ vd ,1 (z ) vd ,3 (z ) vd ,2 (z ) vd ,4 (z )⎠⎟⎟⎟⎥⎥
⎣⎢
⎦
⎡ 1 ⎛gn ,1 (z ) gn ,2 (z )⎞⎤
1
⎟⎟⎥
⎜⎜
det ⎢⎢
⎟
(
)
(
)
⎥
⎜
g
z
g
z
( )
n ,4
⎠⎟⎦⎥ vd ,1 (z ) vd ,3 (z ) vd ,2 (z ) vd ,4 (z )
⎣⎢ gd z ⎝ n ,3
(122)
Since the denominator terms have been constructed so that
k
vd ,1 (z ) vd ,3 (z ) vd ,2 (z ) vd ,4 (z ) = ∏ (1 − v j L )
(123)
j =1
where k is the sum of the degrees of each denominator term and the v j ’s are the
eigenvalues associated to the zeros of each denominator term, which are assumed all
inside the unit circle, thus the contribution of the last term in (123) to the Bode constraint
is null. It is the assumption (118) about the representation embedded in vn ,i (z ) that
allows the results of the theorems to be applicable in presence of a generic V (L ) . In
fact, given that assumption, it will be true in general that vn ,i ≠ 1 in
kn ,i
vn ,i (L ) = vn ,i ∏ (1 − vn ,i, j L )
j =1
SIMO derivation
47
(124)
Suppose that the spectral representation of the variance of the state variables is9
⎛ π
⎛vx1 ⎞⎟ ⎜⎜ ∫−π fx1 ,ε1 (ω )d ω
⎜⎜v ⎟⎟⎟ = ⎜⎜ π
⎜⎝ x2 ⎠ ⎜⎜
⎜⎝ ∫−π fx2 ,ε1 (ω )d ω
fx1 ,ε2 (ω )d ω ⎞⎟⎟ ⎛⎜σε21 ⎞⎟
⎟⎟⎟ ⎜⎜ 2 ⎟⎟⎟ ,
fx ,ε (ω )d ω ⎠⎟⎟ ⎜⎝⎜σε2 ⎠⎟⎟
−π 2 2
∫
∫
π
−π
π
(125)
where
−i ω
−i ω
⎛x 1,t ⎞⎟ ⎛⎜x 1,ε1 (e ) x 1,ε2 (e )⎞⎟⎟ ⎛ε1t ⎞⎟
⎜⎜ ⎟ = ⎜⎜
⎟⎜ ⎟ ,
⎜⎝x 2,t ⎠⎟⎟ ⎜⎜x (e −iω ) x (e −iω )⎟⎟⎟ ⎝⎜⎜ε2t ⎠⎟⎟
2,ε2
⎝ 2,ε1
⎠
(126)
and
2
⎛ fx1 ,ε1 (ω ) fx1 ,ε2 (ω )⎞⎟ ⎜⎛ x 1,ε1 (e −iω )
⎟⎟ ≡ ⎜⎜
⎜⎜⎜
(
)
(
)
⎜⎝ fx2 ,ε1 ω fx2 ,ε2 ω ⎠⎟⎟ ⎜⎜ x (e −iω ) 2
⎜⎝ 2,ε1
2
x 1,ε2 (e −iω ) ⎞⎟⎟
⎟⎟ .
2⎟
−i ω
⎟
x 2,ε2 (e ) ⎠⎟
(127)
Then the controlled system can be written as:
−i ω
−i ω
⎛πC t ⎞⎟ ⎛⎜s1 (e −iω ) s2 (e −iω )⎞⎛
⎟⎟ ⎜⎜x 1,ε1 (e ) x 1,ε2 (e )⎞⎟⎟ ⎛⎜ε1t ⎞⎟
⎜⎜ ⎟ ⎜
⎟⎟ ⎜
⎟⎜ ⎟
⎜⎜ C ⎟⎟ = ⎜⎜
−i ω
−i ω ⎟
−i ω
−i ω ⎟ ε ⎟
⎜⎝y t ⎠⎟⎟ ⎜⎝s 3 (e ) s 4 (e )⎠⎝
⎟ ⎜⎜x 2,ε1 (e ) x 2,ε2 (e )⎠⎟⎟ ⎜⎝ 2t ⎟⎠
⎛s1 (e −iω ) x 1,ε (e −iω ) + s2 (e −iω ) x 2,ε (e −iω ) s1 (e −iω ) x 1,ε (e −iω ) + s2 (e −iω ) x 2,ε (e −iω )⎞⎟ ⎛ε1t ⎞
⎜
1
1
2
2
⎜
⎟⎟ ⎜ ⎟⎟
=⎜
⎜s (e −iω ) x (e −iω ) + s (e −iω ) x (e −iω ) s (e −iω ) x (e −iω ) + s (e −iω ) x (e −iω )⎟⎟⎟ ⎜⎝⎜ε2t ⎠⎟⎟
⎜⎝ 3
1,ε1
4
2,ε1
3
1,ε2
4
2,ε2
⎠
(128)
It is useful to compare (126) with (128) in order to grasp the effect of a feedback policy
in a multivariate (bivariate) system. Each term in the matrix transfer function of the
9
Notice that a generalized objective function for the policy maker should be applied to a
variance-covariance matrix of the state variables. This is indeed the general approach,
taken from the control literature, of Hansen and Sargent (2005).
48
controlled system depends on a linear combination of the transfer functions of the
uncontrolled system for both state variables relative to the same term of the driving
process vector. In other words, the transfer function x 1,Cε1 (e −iω ) depends on x 1,ε1 (e −iω ) and
x 2,ε1 (e −iω ) combined linearly by s1 (e −iω ) and s2 (e −iω ) . The action in the state variable
generated by x 1,Cε1 (e −iω ) is thus a combination of the independent actions of both the
uncontrolled state variables and their common action. In fact, the controlled matrix of
spectra is
⎛ fxC,ε (ω ) fxC,ε (ω )⎞⎟
⎜⎜ 1 1
1 2
⎟⎟
⎜⎜ C
⎟
C
(
)
(
)
f
ω
f
ω
⎜⎝ x2 ,ε1
x 2 ,ε2
⎠⎟⎟
⎛ s e −iω x e −iω + s e −iω x e −iω 2
) 1,ε1 ( ) 2 ( ) 2,ε1 ( )
⎜⎜ 1 (
≡ ⎜⎜
2
−i ω
−i ω
−i ω
−i ω
⎜
⎜⎝ s 3 (e ) x 1,ε1 (e ) + s 4 (e ) x 2,ε1 (e )
2 (129)
s1 (e −iω ) x 1,ε2 (e −iω ) + s2 (e −iω ) x 2,ε2 (e −iω ) ⎞⎟⎟
⎟⎟
2⎟
−i ω
−i ω
−i ω
−i ω
s 3 (e ) x 1,ε2 (e ) + s 4 (e ) x 2,ε2 (e ) ⎟⎠⎟
and each spectral component is of the form:
fxC1 ,ε1 (ω ) =
2
2
2
2
s1 (e −iω ) x 1,ε1 (e −iω ) + s2 (e −iω ) x 2,ε1 (e −iω ) +
(130)
s1 (e −iω ) s2 (e iω ) x 1,ε1 (e −iω ) x 2,ε1 (e iω ) + s1 (e iω ) s2 (e −iω ) x 1,ε1 (e iω ) x 2,ε1 (e −iω )
Following Sargent (1987, eq. (47) page 268) we notice that the cross-spectrum is defined
as:
fx1x2 ,ε1 (ω ) = x 1,ε1 (e −iω ) x 2,ε1 (e iω ) and
fx2x1 ,ε1 (ω ) = x 1,ε1 (e iω ) x 2,ε1 (e −iω )
Thus each spectrum component of the controlled process can be finally written as:
49
(131)
fxC1 ,ε1 (ω ) =
2
2
s1 (e −iω ) fx1 ,ε1 (ω ) + s2 (e −iω ) fx2 ,ε1 (ω ) +
(132)
s1 (e −iω ) s2 (e iω ) fx1x2 ,ε1 (ω ) + s1 (e iω ) s2 (e −iω ) fx2x1 ,ε1 (ω )
fxC1 ,ε2 (ω ) =
2
2
s1 (e −iω ) fx1 ,ε2 (ω ) + s2 (e −iω ) fx2 ,ε2 (ω ) +
(133)
s1 (e −iω ) s2 (e iω ) fx1x2 ,ε2 (ω ) + s1 (e iω ) s2 (e −iω ) fx2x1 ,ε2 (ω )
2
2
fxC2 ,ε1 (ω ) = S 3 (e −iω ) fx1 ,ε1 (ω ) + S 4 (e −iω ) fx2 ,ε1 (ω ) +
S 3 (e −iω ) S 4 (e iω ) fx1x2 ,ε1 (ω ) + S 3 (e iω ) S 4 (e −iω ) fx2x1 ,ε1 (ω )
2
(134)
2
fxC2 ,ε2 (ω ) = S 3 (e −iω ) fx1 ,ε2 (ω ) + S 4 (e −iω ) fx2 ,ε2 (ω ) +
S 3 (e −iω ) S 4 (e iω ) fx1x2 ,ε2 (ω ) + S 3 (e iω ) S 4 (e −iω ) fx2x1 ,ε2 (ω )
(135)
as claimed in the text.
Derivations for Section 4 forward looking model
Define the matrix
z − .99
⎛
Jˆ ( z ) = ⎜
2
⎝ −1.59 + 1.59 gπ z
−0.096 z
⎞
2⎟
−1 + z + 1.59 g y z ⎠
(136)
which implies
Jˆ ( z ) G ( z ) wt = ( β g 0 − zW ( z ) ) wt
50
(137)
This means off-diagonal elements of the characteristic matrix are non-zero. Note that
under our assumptions, each term
(
Jˆij ( z ) is a finite degree polynomial. Let
)
J ( z ) = Adj Jˆ ( z ) , then the candidate solution can be then written as:
−1
G ( z ) = Jˆ ( z ) ( β g 0 − zW ( z ) )
G (z) =
⎛ J11 ( z ) J12 ( z ) ⎞ ⎛ β11 g 0,11 + β12 g 0,21 − zv11 ( z ) β11 g 0,12 + β12 g 0,22 − zv12 ( z ) ⎞
1
⎟
⎜
⎟⎜
det Jˆ ( z ) ⎝ J 21 ( z ) J 22 ( z ) ⎠⎝ β 21 g 0,11 + β 22 g 0,21 − zv21 ( z ) β 21 g 0,12 + β 22 g 0,22 − zv22 ( z ) ⎠
(
)
⎛
⎜
⎜
1
G ( z) =
⎜
det Jˆ ( z ) ⎜
⎜
⎝
(
)
J11 ( z ) ( β11 g 0,11 + β12 g 0,21 − zv11 ( z ) ) + J12 ( z ) ( β 3 g 0,11 + β 4 g 0,21 − zv21 ( z ) )
⎞
⎟
J11 ( z ) ( β11 g 0,12 + β 2 g 0,22 − zv12 ( z ) ) + J12 ( z ) ( β 21 g 0,12 + β 22 g 0,22 − zv22 ( z ) ) ⎟
⎟
J 21 ( z ) ( β11 g 0,11 + β12 g 0,21 − zv11 ( z ) ) + J 22 ( z ) ( β 21 g 0,11 + β 22 g 0,21 − zv21 ( z ) )
⎟
J 21 ( z ) ( β11 g 0,12 + β12 g 0,22 − zv12 ( z ) ) + J 22 ( z ) ( β12 g 0,12 + β 22 g 0,22 − zv22 ( z ) ) ⎟⎠
The conditions for uniqueness of the rational expectations solution corresponds to each
numerator term in this matrix to become zero at the unstable poles of the denominator
(zeros inside the unit circle) that we denote by zi . Each zi provides the associated set of
equations whose rank is zero, therefore the system that solves for the constant is:
J11 ( z1 ) ( β11 g 0,11 + β12 g 0,21 − z1v11 ( z1 ) ) + J12 ( z1 ) ( β 21 g 0,11 + β 22 g 0,21 − z1v21 ( z1 ) ) = 0
J11 ( z2 ) ( β11 g 0,11 + β12 g 0,21 − z2 v11 ( z2 ) ) + J12 ( z2 ) ( β 21 g 0,11 + β 22 g 0,21 − z2 v21 ( z2 ) ) = 0
J11 ( z1 ) ( β11 g 0,12 + β12 g 0,22 − z1v12 ( z1 ) ) + J12 ( z1 ) ( β 21 g 0,12 + β 22 g 0,22 − z1v22 ( z1 ) ) = 0
J11 ( z2 ) ( β11 g 0,12 + β12 g 0,22 − z2 v12 ( z2 ) ) + J12 ( z2 ) ( β 21 g 0,12 + β 22 g 0,22 − z2 v22 ( z2 ) ) = 0
Let
51
α ( z ) = J11 ( z ) β11 + J12 ( z ) β 21
δ ( z ) = J11 ( z ) β12 + J12 ( z ) β 22
κ11,21 ( z ) = z ( J11 ( z ) v11 ( z ) + J12 ( z ) v21 ( z ) )
κ12,22 ( z ) = z ( J11 ( z ) v12 ( z ) + J12 ( z ) v22 ( z ) )
The explicit expression for the constants are
g 0,11 =
δ ( z2 ) κ11,21 ( z1 ) − δ ( z1 ) κ11,21 ( z2 )
α ( z1 ) δ ( z2 ) − α ( z2 ) δ ( z1 )
α ( z1 ) κ11,21 ( z2 ) − α ( z2 ) κ11,21 ( z1 )
g 0,21 =
α ( z1 ) δ ( z2 ) − α ( z2 ) δ ( z1 )
(138)
and
g 0,12 =
g 0,22
δ ( z2 ) κ12,22 ( z1 ) − δ ( z1 ) κ12,22 ( z2 )
α ( z1 ) δ ( z2 ) − α ( z2 ) δ ( z1 )
α ( z1 ) κ12,22 ( z2 ) − α ( z2 ) κ12,22 ( z1 )
=
α ( z1 ) δ ( z2 ) − α ( z2 ) δ ( z1 )
(139)
Under the original Taylor rule ( gπ = 1.5 , g y = 0.5 ), it is possible to see that the
determinant of the characteristic equation of the system has two zeros inside the unit
circle, which, according to proposition (1), ensures uniqueness10. In fact one has:
(
)
det Jˆ ( z ) = 0.99 − 2.1z + 0.21z 2 + z 3
= ( z + 1.73)( z − 0.92 )( z − 0.60 )
(140)
The original Taylor rule delivers the following transfer function matrix:
10
The Matlab codes performing the following calculations are available from the authors upon request.
52
1 + 0.52 L
⎛
1.53
⎜
1
1 + 0.57 L
G ( L) =
⎜
1 + 1.49 L
1.78 ⎜
⎜ −1.60
1 + 0.57 L
⎝
0.066 ⎞
1 + 0.57 L ⎟
⎟
1.088 ⎟
⎟
1 + 0.57 L ⎠
(141)
which leads to the spectral densities reported in the text
Under free dynamics, We study next the solution to (1) under free dynamics: gπ = 0
and g y = 0 . In such a case we have:
⎛ z − .99 −0.096 z ⎞
JˆF ( z ) = ⎜
⎟
−1 + z ⎠
⎝ −1.59
(142)
(
(143)
and this gives:
)
det JˆF ( z ) = ( z − 1.47 )( z − 0.67 )
In this case only one root is inside the unit circle, it follows that without any additional
condition there exists a set of solutions. One can think of several methods to choose a
solution among this set. We apply a continuity principle consisting in extending the
solution that would result if both roots were inside the unit circle. In other words, we
apply the same procedure as above even though the cancellation of one of the roots is not
necessary for a finite variance. The solution under free dynamics is
⎛ 1 0.096 ⎞
GF ( z ) = ⎜
⎟
1 ⎠
⎝0
leading to the spectral densities in the text.
Appendix 2. Feedback Policies and Non-Revealing Equilibria
53
(144)
In Section 2 we argued that for forward looking models, the design limits faced
by a policymaker depend on the revealing properties of the equilibrium before and after
the policy is implemented. An equilibrium is revealing if by observing the current and
past realized state variables x t is possible to recover the fundamental disturbances wt . If
this is not the case the equilibrium is said to be non-revealing. Here we present an
example showing that non-revealing equilibria are possible and that a feedback control on
state variables is capable of turning a non-revealing equilibrium into a revealing one and
vice-versa.
We consider univariate models for simplicity as the main insights are maintained
as one moves to multivariate analogues. Suppose that the univariate law of motion is:
x t = βEt x t +1 + Ax t −1 + BFx t −1 + W (L ) wt .
We assume that agents knows the disturbance process W (L ) wt .
(145)
In contrast, the
policymaker is assumed to observe only the current and past values of the state variable
x t . Under these assumptions the revealing properties of the equilibria matter in
understanding constraints on the policymaker.
The agents are assumed to observe
directly the fundamental disturbances and so any equilibrium is revealing for them by
definition. This parallels the assumption on the asymmetry in the information sets of the
agents and the econometrician in Hansen and Sargent (1991). Applying the procedure for
solving this type of expectational differential equations as reported in Appendix 1, it can
be shown that the moving average solution is
G C (L ) =
where
1
λ1
and
1
λ2
are
⎛1⎞
1
W ⎜⎜ C ⎟⎟⎟ − LW (L )
C
⎜⎝ λ1 ⎠⎟
λ1
the
β (1 − λ1C L )(1 − λ2C L )
roots
(β − L + (A + BF ) L2 ) and uniqueness requires
of
1
λ1
a simple MA (1) for the disturbance process so that:
54
,
the
<1<
(146)
characteristic
1
λ2
polynomial
. We consider the case of
W (L ) = 1 + wL
(147)
where w < 1 . The unique solution of the uncontrolled system ( F = 0 ) can thus be
written as:
NC
1 ⎛⎜
w ⎞⎛
⎟⎟ ⎜⎜1 + λ1 w L ⎞⎟⎟
1
+
⎜
⎟⎟ ⎜
λ NC ⎜⎝
λ1NC ⎠⎝
λ1NC + w ⎠⎟⎟
,
G NC (L ) = 1
β (1 − λ2NC L )
(148)
where uniqueness requires λ1 > 1 > λ2 . For this solution to be non-revealing we need
that
λ1NC w
> 1.
λ1NC + w
(149)
For expositional purposes, we use the point estimates of Gali, Gertler and Lopez-Salido
(2005) of a model similar to (145): A = 0.61 and β = 0.36 , then λ1 9
9
and λ2 5
10
5
which confirm the uniqueness of the solution. Now, if one takes 1 > w > 1 + w , for
9
instance w = −
4
λ NC w
, it follows that NC1
> 1 and according to (149) the equilibrium
5
λ1 + w
(148) is non-revealing. The policymaker, or the econometrician, will be able to recover
from current and past state variables the innovation process11:
11
⎛
λ NC w ⎞
The non-invertible polynomial ⎜1 + NC1
L ⎟ is a Blaschke factor.
⎝ λ1 + w ⎠
55
⎛
⎞
λ NC w
wt* = ⎜⎜1 + NC1
L ⎟⎟⎟ wt
⎜⎝
λ1 + w ⎠⎟
(150)
The range of parameter values for λ , given some w , that imply an equilibrium is nonrevealing is an open set, which means that even after applying the control the equilibrium
remains non-revealing.
Notice that by choosing appropriately the control F it is possible for
λ1C w
< 1.
λ1C + w
(151)
In our numerical example, by choosing F so that BF = −0.3 one would still have a
unique stable solution and, in addition, a revealing equilibrium since:
λ1C w
= 0.96 < 1 .
λ1C + w
(152)
By the same logic it is possible to show that a feedback control can turn a revealing
equilibrium into a non-revealing one.
56
Bibliography
Brock, W. and S. Durlauf, (2004) “Elements of a Theory of Design Limits to Optimal
Policy,” The Manchester School, 72, Supplement 2, 1-18.
Brock, W. and S. Durlauf, (2005), “Local Robustness Analysis: Theory and Application,”
Journal of Economic Dynamics and Control
Brock, W., S. Durlauf, and K. West (2003), “Policy Evaluation in Uncertain Economic
Environments (with discussion),” Brookings Papers on Economic Activity, 1, 235-322.
Brock, W., S. Durlauf, and K. West, (2006), , Journal of Econometrics, forthcoming.
Chen, J., (1995), “Sensitivity Integral Relations and Design Trade-Offs in Linear
Multivariate Feedback Systems,” IEEE Transactions on Automatic Control, 40, 10, 17001716.
Chen, J. and C. Nett, (1993), “Bode Integrals for Multivariable Discrete Time Systems,”
Proceedings of the 32nd IEEE Conference on Decision and Control, IEEE, San Antonio,
TX, 811-816.
Chen, J. and C. Nett, (1995), “Sensitivity Integrals for Multivariate Discrete-Time
Systems,” Automatica, 31, 8, 1113-1124.
Fernandez-Villaverde, J., J. Rubio-Ramirez, and T. Sargent, (2005), “The A, B, C’s (and
D’s) for Understanding VAR’s,” NBER Working Paper no t0308.
Friedman, M., (1948), “A Monetary and Fiscal Framework for Economic Stability,”
American Economic Review, 38, 245-264.
Friedman, M., (1951), “Comments on Monetary Policy,” Review of Economics and
Statistics, 33, 3, 186-191.
Futia, C., (1981), “Rational Expectations in Stationary Linear Models,” Econometrica,
49, 171-192.
Giannoni, M., (2002), “Does Model Uncertainty Justify Caution? Robust Optimal
Monetary Policy in a Forward-Looking Model,” Macroeconomic Dynamics, 6, 111-144.
Gradshteyn, I. and I. Ryzhik, (2000), Table of Integrals, Series, and Products, Sixth
Edition, San Diego: Academic Press.
Hansen, L. and T. Sargent, (1980), “Formulating and Eatimating Dynamic Linear
Rational Expectations Models,” Journal of Economic Dynamics and Control, 2, 7-46.
Hansen, L., and T. Sargent, (1981), “A Note on Wiener-Kolmogorov Prediction
Formulas for Rational Expectations Models,” Econmics Letters, 8, 3, 255-260.
57
Hansen, L. and T. Sargent, (1983), “The Dimensionality of the Aliasing Problem in
Models with Rational Spectral Densities,” Econometrica, 51, 2, 377-388.
Hansen, L. and T. Sargent, (1991), “Exact Linear Rational Expectations Models:
Specification and Estimation,” in Rational Expectations Econometrics, L. Hansen and T.
Sargent, eds., Westview Press.
Hansen, L. and T. Sargent, (2001), “Acknowledging Misspecification in Macroeconomic
Theory,” Review of Economic Dynamics, 4, 519-35.
Hansen, L. and T. Sargent, (2003) “Robust Control of Forward-Looking Models,”
Journal of Monetary Economics, 50, 581-604.
Hansen, L. and T. Sargent, (2005), Robustness. Book manuscript, Hoover Institution,
Stanford University and forthcoming, Princeton University Press.
Iglesias, P., (2001), “Tradeoffs in Time-Varying Linear Systems: An Analogue of Bode’s
Sensitivity Integral,” Automatica, 37, 1541-1550.
Kasa, K., (2000), “Forecasting the Forecasts of Others in the Frequency Domain,”
Review of Economic Dynamics, 3, 726-756.
Kasa, K. T. Walker, and C. Whiteman, (2004), “Asset Pricing with Heterogeneous
Beliefs,” mimeo, Simon Fraser University.
Kwakernaak, H. and R. Sivan, (1972), Linear Optimal Control Systems, New York: John
Wiley and Sons.
Levin, A. and J. Williams. (2003), “Robust Monetary Policy with Competing Reference
Models.” Journal of Monetary Economics, 50, 945-975.
Onatski, A. and J. Stock, (2002), “Robust Monetary Policy Under Model Uncertainty in a
Small Model of the U.S. Economy,” Macroeconomic Dynamics, 6, 85-110.
Onatski, A. and N. Williams, (2003), “Modeling Model Uncertainty,” Journal of the
European Economic Association, 1, 1087-1122.
Otrok, C., (2001), “Spectral Welfare Cost Functions,” International Economic Review,
42, 2, 345-367.
Otrok, C., B. Ravikumar, and C. Whiteman, (2002), “Habit Formation: A Resolution of
the Equity Premium Puzzle, Journal of Monetary Economics, 49, 1261-1288.
Sargent, T., (1987), Macroeconomic Theory, San Diego: Academic Press.
58
Sargent, T., (1999), “Comment,” in Monetary Policy Rules, J. Taylor, ed. Chicago:
University of Chicago Press.
Seron, M., J. Braslavsky, and G. Goodwin, (1997), Fundamental Limitations in Filtering
and Control, New York: Springer-Verlag.
Skogestad, S. and I. Postlethwaite, (1996), Multivariable Feedback Control: Analysis and
Design, New York: John Wiley.
Taylor, J., (1993), “Discretion Versus Policy Rules in Practice,” Carnegie-Rochester
Conference Series on Public Policy, 39, 195-214.
Taylor, J., (ed.), (1999), Monetary Policy Rules, Chicago: University of Chicago Press.
Tetlow, R. and P. von zur Muehlen, (2001), “Robust Monetary Policy With Misspecified
Models: Does Model Uncertainty Always Call for Attenuated Policy?,” Journal of
Economic Dynamics and Control, 25, 6-7, 911-949.
Whiteman, C., (1985), “Spectral Utility, Wiener-Hopf Techniques, and Rational
Expectations,” Journal of Economic Dynamics and Control, 9, 225-240.
Whiteman, C., (1986), “Analytical Policy Design Under Rational Expectations,”
Econometrica, 54, 6, 1387-1405.
Wu, B.-F. and E. Jonckheere, (1992), “A Simplified Approach to Bode’s Theorem for
Continuous and Discrete Time Systems,” IEEE Transactions on Automatic Control, 37,
100, 1797-1802.
59