An Overview of the Mathematics of Optical Tomography Joe Eichholz January 18, 2012
advertisement

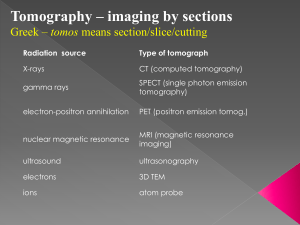
Math of Optical Tomography An Overview of the Mathematics of Optical Tomography Joe Eichholz Rose-Hulman Institute of Technology January 18, 2012 Math of Optical Tomography Outline 1 Motivation 2 Intuition 3 Mathematics 4 Recent Work Math of Optical Tomography Motivation tomography (n) - a method of producing a three-dimensional image of the internal structures of a solid object (such as the human body or the earth) by the observation and recording of the dierences in the eects on the passage of waves of energy impinging on those structures. Math of Optical Tomography Motivation Tomography techniques play a large role in current diagnostic medicine, and the development of new techniques continues to be an area of active research. type of energy wave name of scan X-rays CT gamma rays SPECT radio-frequency waves MRI Math of Optical Tomography Motivation We seek to develop a new imaging modality in which optical light is the energy source. Compared to other technologies this technique has several potential advantages: Use of non-ionizing radiation Potential for high resolution even in soft tissue Relatively inexpensive Math of Optical Tomography Motivation Several optical tomography imaging techniques exist in various forms, with varying degrees of maturity. They can be loosely categorized in to two camps. Bioluminescense Tomography The structures of interest are emitting light, we measure the amount of light escaping the object of interest and reconstruct what the source looks like. Diuse Optical Tomography We expose the object of interest to a known light source, measure the resulting light emitted from the object, and try to recover how much/where the light was scattered/absorbed. This will give us information about the internal structure of the object. Math of Optical Tomography Intuition Intuition: A source reconstruction problem Math of Optical Tomography Intuition A source reconstruction problem ? Pinhole Sensors Math of Optical Tomography Intuition A source reconstruction problem ? Pinhole Sensors Math of Optical Tomography Intuition A source reconstruction problem Pinhole Sensors Math of Optical Tomography Intuition A source reconstruction problem Pinhole Sensors Math of Optical Tomography Intuition A source reconstruction problem Pinhole Sensors Math of Optical Tomography Intuition A source reconstruction problem Pinhole Sensors Math of Optical Tomography Intuition A source reconstruction problem Pinhole Sensors Math of Optical Tomography Intuition A source reconstruction problem Pinhole Sensors Math of Optical Tomography Intuition What information did we use to come to our conclusion? Measurements from an experiment Our notion that light moves in straight lines. Used our idea of how light moves to predict the outcome of the experiment if the light source is in various places Chose the source position that gave results most consistent with the actual outcome Math of Optical Tomography Intuition Intution: An absorption reconstruction problem Math of Optical Tomography Intuition Absorption reconstruction problem Math of Optical Tomography Intuition Absorption reconstruction problem OW Math of Optical Tomography Intuition Absorption reconstruction problem X-ray source X-ray detector Math of Optical Tomography Intuition Assumptions we will use to determine where break is: X-rays move in straight lines through the body X-rays are mostly absorbed by bone X-rays mostly pass through soft tissue Math of Optical Tomography Intuition Absorption reconstruction problem X-ray source Detector reading X-ray detector position Math of Optical Tomography Intuition Absorption reconstruction problem X-ray source Detector reading X-ray detector position Math of Optical Tomography Intuition Absorption reconstruction problem X-ray source Detector reading X-ray detector position Math of Optical Tomography Intuition Absorption reconstruction problem X-ray source Detector reading X-ray detector position Math of Optical Tomography Intuition Absorption reconstruction problem We used the same kind of procedure as the last problem: Take measurements Develop a model that tells us what the expected results would be if the break were in a certain place in the bone Break must be in a place that is consistent with the measurements we have Math of Optical Tomography Mathematics Mathematics Math of Optical Tomography Mathematics Bioluminescense Tomography (BLT) The general procedure for BLT is 1 Genetically modify some cells of interest to emit light 2 Measure amount of light coming out of animal 3 Reconstruct light source distribution, which gives the position of the modied cells Math of Optical Tomography Mathematics BLT We will need a model of light propagation. i.e., if we are given a source distribution, how do we predict what our measurements will be? Math of Optical Tomography Mathematics Given a source distribution, we are going to end up nding the intensity of light, u , at every point in the object of interest moving in every possible direction. Let X be the spatial domain corresponding to the object we are imaging, and x a typical point in X . Let Γ Let S be the boundary of X 2 be the unit sphere, and ω a typical direction in S Γ+ be the outow boundary of X × S 2 i.e. (x , ω) such that x ∈ Γ and ω points away from Let 2 all the points X at x . Γ− be the inow boundary of X × S 2 , i.e. all points (x , ω), such that x ∈ Γ and ω points in to X at the point Let x. Math of Optical Tomography Mathematics Light source distributions are represented as functions f :X →R Possible experimental outcomes are functions on Γ+ to R. A model of light propagation is a function that takes a source distribution f to the resulting boundary measurements. We call this function M (f ). Reconstructing the light source means nding the light source whose resulting boundary measurements will most closely agree with the actual measurements taken. argmin f ||M (f ) − umeas || Math of Optical Tomography Mathematics What's the problem? If we decide to look for f in some nite dimensional function space we can represent f as an n dimensional vector, ~ f. Dene E (~ f) = ||M (f ) − umeas || The problem min E (~ f) ~f is now a simple nite dimensional optimization problem (possibly constrained), which is a well understood area of applied mathematics. Math of Optical Tomography Mathematics The problem ω · ∇u (x , ω) + µt (x )u (x , ω) = µs (x ) Z S2 0 0 g (ω, ω )u (x , ω )d ω µs ( x ) gives the amount of scattering at each point x µa ( x ) gives the amount of absorption at each point x µt (x ) is the total attenuation coecient (µ 0 + f (x ) a ( x ) + µs ( x ) ) g (ω, ω 0 ) gives the probability of a photon traveling in direction ω 0 redirecting to direction ω u (x , ω) gives the intensity of light at each position x moving in direction ∈X ω M (f ) is the solution u to the radiative transport equation Math of Optical Tomography Mathematics The problem, again In order to evaluate our model M (f ) ω · ∇u (x , ω) + µt (x )u (x , ω) = µs (x ) u |Γ− This will pose a serious challenge. we need to solve the RTE Z S =0 0 2 0 g (ω, ω )u (x , ω )d ω 0 + f (x ) Math of Optical Tomography Mathematics A restatement Another way to think of this problem is: If we are given the source function f , the resulting light distribution u will be the solution to ω · ∇u (x , ω) + µt (x )u (x , ω) = µs (x ) Z S 0 2 0 g (ω, ω )u (x , ω )d ω 0 + f (x ) However, if we are given information about u (from measurement), can we gure out what the function f was? This problem falls in the category of large and well studied eld. inverse problems, which is a Math of Optical Tomography Mathematics The RTE ω · ∇u (x , ω) + µt (x )u (x , ω) = µs (x ) u |Γ− Z S 0 2 0 g (ω, ω )u (x , ω )d ω 0 + f (x ) =0 Is classied as an integro-dierential equation in 5 independent variables. Except in the simplest of scenarios, there is no hope of a closed form solution. Numerical solution of this equation will be dicult because: High dimensionality leads to a huge number of unknowns Presence of integral terms leads to non-local eects Math of Optical Tomography Mathematics Recap In the BLT problem we wish to recover the distribution of light inside a biological tissue from some measurements of light escaping the tissue. Steps meas Measure light escaping tissue, call it u Use knowledge of the domain to create model of light escaping tissue for any source function, call it M (f ). meas Recreate the light source that corresponds to u min E (~ f) f ∈F where E (~ f) = ||umeas − M (f )|| by Math of Optical Tomography Mathematics Problems min E (fˆ) f ∈F Is it clear that there is a unique f that minimizes E ? Typical minimization algorithms require many evaluations of the objective function, E . Worse still, they will require information about ∇E . Evaluation of E requires the numerical solution of RTE with high accuracy. Evaluation of signicantly more expensive. ∇E is Math of Optical Tomography Mathematics One solution min E (fˆ) f ∈F The ill-posedness is usually xed via regularization min E (fˆ) f ∈F + ε||f || We just pick out the function f that minimizes E and has minimal norm (in some appropriate norm). You may have seen this idea in linear algebra when solving under-determined systems of equations. Math of Optical Tomography Mathematics Current Research Areas Math of Optical Tomography Mathematics Current Research Topics The more dicult problem is to evaluate E and ∇E quickly. That is, we want to be able to solve the RTE for a given source function f very quickly. Find ways to avoid calculating ∇E Replace the RTE with some other model of light propagation when appropriate Find ways to speed up the numerical solution of the RTE Math of Optical Tomography Mathematics Approximating the RTE Under the hypothesis that attenuation is scattering dominated and that scattering is nearly isotropic it is appropriate to replace the RTE with a diusion approximation −div(D (x )∇u ) + µt u = f where D is a term that involves both absorption and scattering. While these are usually reasonable assumptions, in many biological tissues scattering is highly anisotropic. Examples include synovial uid, cerebrospinal uid, etc. Math of Optical Tomography Mathematics What's the harm? Pinhole Sensors Math of Optical Tomography Mathematics What's the harm? Pinhole Sensors Math of Optical Tomography Mathematics What's the harm? Interface Pinhole Sensors Math of Optical Tomography Mathematics The moral of the story is that replacing the RTE with an approximation is a great idea when it works, but it will give terrible results in many important cases. Math of Optical Tomography Mathematics Speeding up solution to the RTE We can replace the RTE with other approximations of varying accuracy. We can try to accelerate the numerical solution of the RTE A wide variety of numerical schemes have been designed, including nite dierence, nite element, collocation, discontinuous Galerkin, etc. Any reasonable numerical method will boil down to solving a huge linear system of equations Math of Optical Tomography Recent Work Solve Tu = Su + f T comes from the transport part of the equation, and can be made lower triangular (ish), S comes from the scattering part of the equation and is usually dense. There are many well studied methods in the literature for this kind of system, all are iterative and most are accelerated using preconditioners or Krylov subspace methods. Math of Optical Tomography Recent Work Solve Tu = Su + f The most classic technique in the eld is the source iteration method 1 2 u0 =0 Tu n = Su n−1 + f This actually works pretty well when the attenuation is not scattering dominated. Math of Optical Tomography Recent Work Solve Tu = Su + f Some recent work during a summer REU is applying classic methods in numerical linear algebra to the above matrix equation. Results were encouraging. S L where S , S D and S U = SL + SD + SU are block lower triangular, diagonal, and upper triangular resp. The rst method is basically block Gauss-Seidel iteration: (T + SL + SD )u n = SU u n−1 + f Math of Optical Tomography Recent Work Solve Tu = Su + f where S = SL + SD + SU and T = TD + TL the second method is a block form of the successive-over-relaxation method (TD + SD )u n = (1 − ω)(TD + SD )u n−1 + ω −(TL + SL )u n+1 − (TU + SU )u n + f Here, ω is an acceleration parameter that needs to be chosen appropriately. Math of Optical Tomography Recent Work Solve Tu = Su + f The development of the Gauss-Seidel and SOR acceleration techniques resulted in a huge reduction in the number of iterations required to solve the linear system without even the need for preconditioning. Math of Optical Tomography Recent Work In addition to reducing the number of iterations of a linear solver required to solve the RTE, we may attempt to speed up each iteration using parallel computations. Multicore programming GPU computing Distributed memory (MPI) computing Math of Optical Tomography Recent Work Final Recap Solution of the BLT (and OT problems in general) is theoretically possible, but currently extremely slow. Research needs to go in to Reducing number of RTE evaluations required in the optimization routines Accelerating the solution of the RTE when required Designing better numerical schemes tailored for use in OT (better convergence order, multigrid, adaptive) Designing faster methods to solve the resulting systems of linear equations Using parallel computing to speed up the solution of the RTE Math of Optical Tomography Recent Work Thanks for listening!