AIAA 2010-1025
advertisement

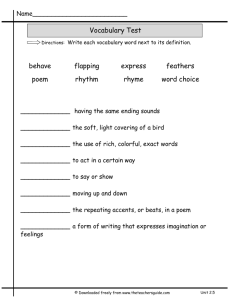
48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition 4 - 7 January 2010, Orlando, Florida AIAA 2010-1025 An Experimental Study of Unsteady Vortex Structures in the Wake of a Piezoelectric Flapping Wing Lucas Clemons1, Hirofumi Igarashi2 and Hui Hu3() Iowa State University, Ames, Iowa, 50011 An experimental study was conducted to explore the potential applications of compact, gearless, piezoelectric flapping wings with the wing size, stroke amplitude and flapping frequency within the range of actual insect characteristics for the development of novel insect-sized, flapping-wing-based Nano-Air-Vehicles (NAVs). Unlike most of previous studies with 2-D flapping airfoil models, a fix-rooted 3-D piezoelectric flapping wing was used in the present study with the consideration of more practical configurations usually used in NAV designs. The experimental study was conducted in a low-speed wing tunnel with the test parameters of chord length of C = 12.7mm, chord Reynolds number of Re = 1,200, flapping frequency of f = 60 Hz, reduced frequency of k = 3.5, and non-dimensional flapping amplitude at wingtip h = A/C = 1.3. The corresponding Strouhul number of the root-fixed 3-D piezoelectric flapping wing is Str = 0.30, which is within the optimal range of 0.2 < Str < 0.4 usually used by flying insects and swimming fishes. A digital particle image velocimetry (PIV) system was used to achieve phased-locked and time-averaged flow field measurements to quantify the formation and separation processes of the Leading Edge Vortex (LEV) structures on the upper and lower surfaces of the flapping wing in relation to the phase angle (i.e., the positions of the flapping wing) during upstroke and down stroke flapping cycles. The evolutions of the wake vortex structures in the chordwise cross planes at different wingspan locations of the rootfixed flapping wing were compared quantitatively to elucidate underlying physics for better understanding of the unsteady aerodynamics of the flapping flight and to explore/optimize design paradigms for the development of novel insect-sized, flapping-wing-based NAVs. I. Introduction W ITH the rapid progress made in micro-electromechanical system (MEMS), micro fabrication, miniaturized power cells, remote communication, imaging and control devices, and other enabling technologies, a new class of miniaturized aircraft known as Nano-Air-Vehicles (NAVs) is becoming possible in the not so distant future. According to the definition given by Defense Advanced Research Projects Agency (DARPA) [1], NAVs are refers as “airborne vehicles no larger than 7.5 cm in length, width or height, capable of performing a useful military mission at an affordable cost and gross takeoff weight (GTOW) of less than or equal to 10 grams”. The potential of NAVs opens up new possibilities in the formulation of various civilian and military strategies with respect to information superiority in urban operations. It is expected that their main attributes will be low cost, low weight, little to no logistical footprint, mission versatility, endurance, low visibility, covertness and precision. Their distinctive flight envelope will include hovering, perching, and other high-agility maneuvers in order to perform 1 Graduate Student, Department of Aerospace Engineering. Graduate Student, Department of Aerospace Engineering. 3 Associate Professor, Department of Aerospace Engineering, AIAA Senior Member, email: huhui@iastate.edu. 2 1 American Institute of Aeronautics and Astronautics Copyright © 2010 by Lucas Clemons , Hirofumi Igarashi and Hui Hu. Published by the American Institute of Aeronautics and Astronautics, Inc., with permission. their missions. The real mission niche for these insect-size aircraft may well be in the indoor setting where there is currently no reconnaissance asset available for various civilian and military applications. Aerodynamic design challenges for NAVs are driven by a combination of low Reynolds number physics (<10,000) and the requirement for a multi-functional platform structure. These challenges have already motivated many novel approaches for NAV designs with fixed-wing, rotary wings, flapping-wings, or even designs like maple tree seeds [2-3]. Fortunately, these challenges are similar to the aerodynamic challenges overcome with micro-airvehicle (MAVs) [4] and researchers can build upon this knowledge. However, the limited volume of space available within the NAVs makes the aerodynamic challenges even greater than those overcome by MAVs. In general, fixedwing solutions for NAV applications are discounted because they require either high forward speed or large wings. Although rotary-wings offer good agility and vertical-take-off-and-landing (VTOL) capability, they suffer from wall-proximity effects, are too noisy, and usually are inefficient for low Reynolds number flight [5-6]. As demonstrated by flying birds and insects, flapping flight is advantageous for its superior maneuverability and lifting capability at low Reynolds numbers. Flapping wing systems as inspired by bird and insect flight generally involve the wing completing pitching, yawing and sweeping components of motion over a flapping cycle [7-8]. Different mechanisms such as pneumatic and motor-driven actuators with gear systems have been widely used to mimic this complex flapping motion, but these mechanisms often suffer from heavy weight and mechanical system complexity [8]. Piezoelectric materials are widely used in smart structures such as sensors and actuators due to their high bandwidth, high output force, compact size, and high power density [9]. Since only a small deflection can be expected directly from the bending piezoelectric unimorph/bimorph, motion amplification mechanisms are usually required to achieve large deflection amplitude. One of the most commonly-used motion amplification mechanism is a piezoelectric fan (piezofan) which couples a piezoelectric unimorph/bimorph to an attached flexible blade and is capable of producing large deflections especially at resonance. Piezofans were first investigated in the late 1970s [10]. In the last few years the demand for portable electronic devices has brought interest in the use of piezofans as a compact, low power, noiseless air cooling technology for applications such as laptop computers and DVD players [11, 12]. Since piezofans are compact in size (i.e., ~10mm in chord length) and can generate large flapping amplitude (~25mm) at very high flapping frequency (60Hz~110Hz), which naturally point to the potential applications of employing piezofans as gearless flapping-wings for NAV designs [13-14]. With this in mind, we conduct the present study to try to leverage the unique features of piezofans to explore the potential applications of piezoelectric flapping wings for the development of novel insect-sized, flapping-wing NAVs. It has been found that flapping airfoils/wings generate thrust at certain combinations of flapping frequency and amplitude. While numerous investigations on flapping airfoils/wings were concentrated on pure pitching or combined heaving and pitching motions, many studies have also been conducted on pure heaving motion. Garrick [15] determined the propulsive efficiency of a plunging and pitching flat-plate airfoil as a function of the flapping frequency, with the assumption of potential flow and small-amplitude oscillation. Freymuth [16], Jones et al.[17] and Lai & Platzer [18] show that the wakes of plunging airfoils can be characterized as drag-producing, neutral, or thrust-producing depending on the plunge frequency and amplitude. Drag-producing wakes are found to have velocity profiles that show a momentum deficit when time averaged, typically with von Karman vortex street wake configurations with two alternating vortex rows, clockwise above and anticlockwise below for a flow from left to right. Vortex pairs form mushroom-like structures that are tilted upstream. Thrust producing wakes show a momentum surfeit, or jet, superimposed on the momentum-deficit velocity profile in the time-averaged flow, such that the thrust of the jet is greater than the inherent drag of the airfoil. The wake configuration is typically a reverse von Karman vortex street with two rows of alternating vortices with anticlockwise above and clockwise below, so that vortex pairs form downstream tilted mushrooms. Neutral wakes, where the thrust due to plunging balances the inherent drag, may show multiple vortex shedding per half-cycle, and vortex pairs are not tilted. While useful information has already been uncovered through those previous studies, much work was still needed for a better understanding of fundamental mechanism of flapping flight for optimum aerodynamic design of functional NAVs. For example, most of the previous studies about the evolution of the unsteady wake vortex structures generated in flapping flight were carried out by using two-dimensional airfoils in flapping motion. Considering more practical configurations in NAV/MAV designs with fix-rooted flapping wings, the effects of spanwise variations in flapping amplitude and the existence of additional wingtip vortex for a fix-rooted flapping wing on the evolution of wake vortex structures as well as the resultant aerodynamic forces (i.e., lift and thrust) have never been explored. It should also be noted that, while the wingtip displacement observed in the flapping flight of birds and insects was found to be on the order of wing chord length, the plunging/pitching amplitudes of the 2 American Institute of Aeronautics and Astronautics flapping airfoils/wings used in most of previous studies were usually quite small, i.e., less than 20% of the airfoil/wing chord length [16-22]. The effects of the large flapping amplitude (i.e., h=A/C > 1.0) on the evolution of the unsteady vortex structures in wakes of 3-D flapping wings are still unclear. Since mechanical-based flapping mechanism systems, which often suffer from heavy weight and mechanical system complexity, were widely used in previous experimental studies, the flapping frequency of the mechanical-based flapping mechanisms are usually less than 10 Hz, which is much lower than the wing beating frequency of birds and insects, e.g. humming birds (40 ~ 60 Hz) and dragonflies (30Hz ~100Hz), which have comparable size as NAVs. Besides, the dimension of the plunging/pitching airfoil/wing models used in most of the previous experimental studies is usually significantly larger compared with the size definition of NAVs. In the present study, an experimental study was conducted to explore the potential applications of a compact, gearless, piezoelectric flapping wing with the wing size, stroke amplitude and flapping frequency within the range of actual insect characteristics for the development of novel insect-sized, flapping-wing-based Nano-Air-Vehicles (NAVs). Unlike most of previous studies with 2-D flapping airfoil models, a fix-rooted 3-D piezoelectric flapping wing was used in the present study with the considering of more practical configurations usually used in NAV designs. The experimental study was conducted in a low-speed wing tunnel with the test parameters of chord length of C = 12.7mm, chord Reynolds number of Re = 1,200, flapping frequency of f = 60 Hz, reduced frequency of k = 3.5, and non-dimensional flapping amplitude at wingtip h = A/C = 1.35. The corresponding Strouhul number (Str) of the 3-D piezoelectric flapping wing is 0.30, which is within the optimal range of 0.2 < Str < 0.4 usually used by flying insects and swimming fishes [23-24]. A digital particle image velocimetry (PIV) system was used to achieve phased-locked and time-averaged flow field measurements to quantify the formation and separation process of the Leading Edge Vortex (LEV) structures on the upper and lower surfaces of the flapping wing in relation to the phase angle (i.e., the positions of the flapping wing) during upstroke and down stroke flapping motions. The evolutions of the wake vortex structures in the chordwise cross planes at different wingspan locations of the root-fixed 3-D flapping wings were compared quantitatively in order to elucidate underlying physics for better understanding of the unsteady aerodynamics of the flapping flight and to explore/optimize design paradigms for the development of novel insect-sized, flapping-wing-based NAVs. II. Experimental Setup and Studied Wings The experimental study was conducted in a closed-circuit low-speed wind tunnel located in the Aerospace Engineering Department of Iowa State University. The tunnel has a test section with a 1.0 × 1.0 ft (30 × 30 cm) cross section and the walls of the test section are optically transparent. The tunnel has a contraction section upstream of the test section with honeycombs, screen structures and a cooling system installed ahead of the contraction section to provide uniform low turbulent incoming flow into the test section. Piezoelectric material A Span length = 34 mm (a). Side view Piezoelectric material c =12.7mm (b). global view Fig. 1: The studied piezoelectric flapping wing 3 American Institute of Aeronautics and Astronautics Figure 1 shows the schematic of the piezoelectric flapping wing used in the present study. The tested piezoelectric flapping wing has a rectangular planform with the chord length 12.7mm (i.e., c=12.7mm), wingspan 34mm (i.e. b=34mm), and thickness 0.26mm. In the present study, the velocity of the incoming flow was set as U∞ = 1.40 m/s, which corresponds to a chord Reynolds number of ReC =1,200. The turbulence intensity of the incoming flow was found to be about 1.0%, measured by using a hot-wire anemometer. Fig. 2: Experimental set up for PIV measurements 25 20 y=0.105*x Measurement data 20 Sine wave fit Measurement data 15 Wingtip Displacement (mm) Peak-to-peak flapping amplitude at Wingtip(mm) Figure 2 shows the experimental setup used in the present study. The test piezoelectric flapping wing was installed in the middle of the wind tunnel test section. A sinusoidal AC voltage, which was supplied by using a function generator and amplified through a high-voltage amplifier, was used to drive the piezoelectric flapping wing. The piezoelectric wing would be in plunging motion with the same frequency as the applied AC voltage. The amplitude of the plunging motion was found to reach its peak value when the frequency of the applied AC voltage matches the resonance frequency of the piezoelectric wing, which is 60 Hz for the present study. As shown in Figure 3, the peak-to-peak flapping amplitude of the wingtip was found to increase linearly with the applied AC voltage. 15 10 5 10 5 0 -5 -10 0 0 40 80 120 160 200 -15 0 90 Applied AC Voltage (V) Fig 3: Flapping amplitude vs. applied AC voltage 180 270 Phase Angle (deg.) Fig4: Wingtip position over one flapping period. 4 American Institute of Aeronautics and Astronautics 360 As revealed in Koochesfahani [22], for a given flapping frequency and amplitude, a variety of complex wake vortex structures can be generated by simply changing the shape of the wave-form of the flapping motion. An experiment was conducted in the present study to measure the wave-form of the plunging trajectory for the wingtip as the piezoelectric wing is driven by a sinusoidal AC voltage. Figure 4 shows the wingtip displacements over one period of the plunging motion. It can be seen clearly that the plunging motion of the piezoelectric flapping wing is sinusoidal when it is driven by a sinusoidal AC voltage. A digital PIV system was used in the present study to make detailed flow velocity field measurements to quantify the formation and separation processes of Leading Edge Vortex (LEV) structures on the upper and lower surface of the piezoelectric flapping wing in relation to the position of the wing during the up stroke and down stroke cycles as well as the evolution of the unsteady vortex structures in the wake of the piezoelectric flapping wing. The flow was seeded with 1~5 μm oil droplets. Illumination was provided by a double-pulsed Nd:YAG laser (NewWave Gemini 200) adjusted on the second harmonic and emitting two pulses of 200 mJ at the wavelength of 532 nm with a repetition rate of 10 Hz. The laser beam was shaped to a sheet by a set of mirrors, spherical and cylindrical lenses. The thickness of the laser sheet in the measurement region is about 1.0 mm. As shown in Fig. 2, a mirror was installed on the top of the wind tunnel to reflect the illuminating laser sheet back to the measurement region to eliminate the shadow region of the piezoelectric flapping wing for PIV measurements. A high resolution 12-bit (1376 x 1040 pixel) CCD camera (SensiCam-QE, CookeCorp) was used for PIV image acquisition with the axis of the camera perpendicular to the laser sheet. The CCD camera and the double-pulsed Nd:YAG laser were connected to a workstation (host computer) via a Digital Delay Generator (DDG, Berkeley Nucleonics, Model 565), which controlled the timing of the laser illumination and image acquisition. During the experiments, the sinusoidal wave signals supplied by the function generator, which was used to drive the piezoelectric flapping wing through a high-voltage amplifier, was also used as the input signal to the DDG to trig the PIV system to achieve phased-locked PIV measurements. By adding different time delays between the input sinusoidal wave signal and the TTL output signal from the DDG to trig the PIV system, the phased-locked PIV measurements at different phase angles (i.e., corresponding to different positions of the flapping wing) in the course of the upstroke and down stroke flapping motion of the piezoelectric flapping wing were accomplished. At each preselected phase angle, 160 frames of instantaneous PIV measurements were used to calculate averaged phase-locaked flow field around the piezoelectric flapping wing. In addition to phase-locked PIV measurements, time-averaged PIV measurements were also conducted by disabling the phase-locking between the flapping motion of the piezoelectric flapping wing and the PIV system in order to derive the time-averaged flow field around the piezoelectric flapping wing. Instantaneous PIV velocity vectors were obtained from the acquired PIV images by using a frame to frame cross-correlation technique involving successive frames of patterns of particle images in an interrogation window 32×32 pixels. An effective overlap of 50% of the interrogation windows was employed to derive instantaneous velocity vectors for the PIV image processing. After the instantaneous velocity vectors ( ui , vi ) were determined, instantaneous spanwise vorticity (ωz) could be derived. The time-averaged quantities such as mean velocity ( U , V ), ensemble-averaged spanwise vorticity (ωz) distributions were obtained from a cinema sequence of 500 frames of instantaneous velocity fields in each studied chordwise cross planes. The measurement uncertainty level for the instantaneous velocity vectors is estimated to be within 2.0%. III. Experimental Results and Discussions A non-dimensional parameter that is widely used to describe the wing kinematics of flying birds and insects is the Strouhal number, Str = f A / U ∞ , which divides flapping frequency ( f ) and stroke amplitude (A) by the forward flying speed U ∞ the flight speed. In addition, reduced frequency, k = 2π f c / U ∞ , where c is the airfoil/wing chord length, was also widely used to characterize the flight performance of many flying animals ranging in size from small insects to albatrosses and kestrels. Since the production of flapping frequency, f, and chord length, c, is a measure of the wing flapping velocity, hence reduced frequency, k, is a measure of the flapping velocity relative to the flying speed. By using non-dimensional flapping amplitude, h = A / c , the relationship between the product kh and the Strouhal number (Str) can be written as kh = 2π Str . It has been found that natural selection is likely to tune birds and insects to fly in the range of 0.2 < Str < 0.4 for high propulsive efficiency. For example, Taylor et al. [24] analyzed the flapping frequencies and amplitudes of 42 species of birds, bats, and insects in cruise flight and found 5 American Institute of Aeronautics and Astronautics that the flying animals operate within a narrow range of Strouhal number with 0.2 < Str < 0.4. Similar results were also found to be true for dolphins, sharks, bony fish and other swimming fishes [23]. For the present study, the incoming flow velocity or forward flight speed is U∞ = 1.40 m/s, the chord length of the piezoelectric flapping wing is c = 12.7mm. The flapping frequency of the piezoelectric flapping wing is f = 60Hz. The peak-to-peak flapping amplitude of the piezoelectric flapping wing at middle wingspan was found to be A = 6.90 mm. Following the work of Taylor et al. [24] to use the peak-to-peak flapping amplitude at middle wingspan to calculate the equivalent Strouhal number (Str) for the fix-rooted 3-D piezoelectric flapping wing, the equivalent Strouhal number (Str) was found to be 0.30, i.e., Str = 0.30, which is within the optimal range of 0.2 < Str < 0.4 usually used by flying birds and insects and swimming fishes. 4 <ωZ>*C/U ∞ U∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 4 Y/C 2 Y/C 2 <ωZ>*C/U ∞ U∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 0 0 -2 -2 0 2 4 6 8 0 2 X/C (a). Wing at the upmost position, down stroke starts 4 4 6 8 X/C (b.) Wing at the neutral position, during down stroke <ωZ>*C/U ∞ U∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 4 <ωZ>*C/U ∞ U∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 2 Y/C Y/C 2 0 0 -2 -2 0 2 4 6 8 0 2 (d). Wing at the neutral position, during upstroke 4 6 8 X/C X/C (c). Wing at the bottom most position, up stroke starts Fig. 5: Phase-locked PIV measurement results in the chordwise cross plane at 50% wingspan. Fig. 5 to Fig. 7 shows the phase-locked PIV measurement results in the chordwise cross planes passing 50% wingspan, 75% wingspan and 100% wingspan (i.e., wingtip) of the root-fixed 3-D piezoelectric flapping wing, respectively. For the phase-locked PIV measurements shown in the figures, the positions of the piezoelectric flapping wing were at its upmost position (i.e., at the end of up strokes or beginning of down strokes), neutral position during down strokes, bottom most position (i.e., at the end of down strokes or the beginning of down strokes), and the neutral position during up strokes, respectively. In the figures, the uniform incoming velocity U∞ was subtracted from the measured flow velocity vectors in order to reveal the unsteady vortex structures induced by the flapping motion more clearly. 6 American Institute of Aeronautics and Astronautics The phase-locked PIV measurement results in the chordwise cross planes at different wingspan locations revealed very similar scenario about the formation and separation processes of the leading edge vortex (LEV) structures on the lower and upper surfaces of the root-fixed piezoelectric flapping wing. It can be seen clearly that, when the piezoelectric flapping wing was at its upmost position to begin a down stroke, while a large positive (counter-clockwise) LEV structure generated on the wing lower surface during the previous upstroke cycle was found to begin to separate from the leading edge of the flapping wing, a new negative (clockwise) LEV was found to form on the upper surface of the piezoelectric flapping wing. During the down stroke of the flapping motion, while the separated positive LEV on the lower surface was found to be stretched and pushed downstream to approach the trailing edge of the wing, the negative LEV structure newly formed on the upper surface of the flapping wing was found to grow up rapidly. As the wing passing the neutral position during the down stroke of the flapping motion, while the negative LEV formed on the upper surface of the flapping wing became much larger and stronger, the majority portion of the separated positive LEV on the wing lower surface was found to be at the downstream of the wing trailing edge with the rear tip of the separated positive LEV structure attached to the trailing edge of the piezoelectric flapping wing. The negative LEV on the upper surface was found to stay attached to the leading edge firmly during the entire down stroke of the flapping motion, and became so big that it covered almost entire upper surface of the flapping wing when the wing reaches its bottom most position at the end of the down stroke of the flapping motion. 4 U∞ <ωZ>*C/U ∞ 4 -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 <ωZ>*C/U ∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 Y/C 2 Y/C 2 U∞ 0 0 -2 -2 0 2 4 6 8 0 2 X/C (a). Wing at the upmost position, down stroke starts 4 U∞ 4 6 8 X/C (b.) Wing at the neutral position, during down stroke <ωZ>*C/U ∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 4 2 U∞ <ωZ>*C/U ∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 Y/C Y/C 2 0 0 -2 -2 0 2 4 6 8 X/C (d). Wing at the neutral position, during upstroke 0 2 4 6 X/C 8 (c). Wing at the bottom most position, up stroke starts Fig. 6: Phase-locked PIV measurement results in the chordwise cross plane at 75% wingspan. 7 American Institute of Aeronautics and Astronautics As the next upstroke starts, while the separated positive LEV formed on the lower surface of the flapping wing from the previous up stroke was found to separate completely from the trailing edge of the piezoelectric flapping wing and became a wake vortex moving further downstream, a new positive LEV was found to form near the leading edge on the lower surface of the flapping wing. During upstroke of the flapping cycles, similar as the positive LEV formed on the lower surface of the flapping wing in the course of the previous down stroke of the flapping cycle, the negative LEV formed on the upper surface of the flapping wing during the previous down stroke would separate from the leading edge and was pushed downstream to approach the trailing edge of the flapping wing. The positive LEV newly formed on the lower surface of the piezoelectric flapping wing was found to stay attached firmly to the leading edge of the wing while becoming bigger and stronger. At the end of the up stroke of the flapping circle, the separated negative LEV on the upper surface would be shed from the trailing edge of the wing as a wake vortex, while the positive LEV formed on the lower surface become so big to cover almost the entire lower surface. The process described above would repeat again as another round of the down stroke of the flapping circle starts. As a result, positive (clockwise) and negative (counterclockewise) vortex structures were found to shed alternatively in the wake region downstream of the piezoelectric flapping wing. 4 <ωZ>*C/U ∞ U∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 <ωZ>*C/U ∞ U∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 4 2 Y/C Y/C 2 0 0 -2 -2 0 2 4 6 0 8 2 4 (a).Wing at the upmost position, down stroke starts 4 6 8 X/C X/C (b). Wing at the neutral position, during down stroke <ωZ>*C/U ∞ U∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 4 <ωZ>*C/U ∞ U∞ -4.50 -3.50 -2.50 -1.50 -0.50 0.50 1.50 2.50 3.50 4.50 2 Y/C Y/C 2 0 0 -2 -2 0 2 4 6 8 0 2 X/C 4 6 8 X/C (c). Wing at the bottom most position, up stroke starts (d). Wing at the neutral position, during up stroke Fig. 7: phase-locked PIV measurement results in the chordwise cross plane at wingtip. While the scenarios of the formation and separation of the positive (clockwise) and negative (counterclockewise) LEV structures on the lower and upper surface of the piezoelectric flapping wing were found to be very similar in the cross planes at different wingspan locations, the evolutions of the wake vortex structures after they 8 American Institute of Aeronautics and Astronautics shed from the trailing edge of the 3-D piezoelectric flapping wing were found to vary significantly in the different cross planes at different wingspan locations. As shown clearly in Fig. 5, after shedding alternatively from the trailing edge of the piezoelectric flapping wing, the separated LEV structures in the cross plane at 50% wingspan of the piezoelectric wing were found to form wake vortex structures with highly concentrated cores. Since the shedding process of the positive (counter-clockwise) separated LEV vortices occurred at the end of upstrokes, while the shedding of the negative (clockwise) vortices at the end of the down strokes, the initial positions of the positive (counter-clockwise) vortex cores were found to be above those of the negative (clockwise) vortex cores. Induced by the flapping motion of the piezoelectric flapping wing, the positive (counter-clockwise) vortex cores were found to move downward, while the negative (clockwise) vortex cores moving upward as they shed from the trailing edge of the flapping wing. The trajectories of the negative (clockwise) and positive (counter-clockwise) wake vortex cores were found to cross over at the downstream location of X/C ≈ 2.5. At further downstream, the concentrated wake vortices were found to align them nicely in two parallel rows with the clockwise (i.e., negative) vortex cores above and anti-clockwise (i.e., positive) vortex cores below, which is a typical von Karman vortex street wake configuration for the incoming flow from left to right. According to Jones et al. [17], such von Karman vortex street wake configuration would indicate that the wake flow at 50% wingspan of the root-fixed 3-D piezoelectric flapping wing would be drag-producing. It would cause momentum deficits in the streamwise velocity profiles downstream the flapping wing in the time-averaged flow field, which was confirmed from the time-averaged PIV measurements given in Fig. 9. In comparison with those in the cross plane at 50% wingspan, the evolution of the wake vortex structures in the cross plane at 75% wingspan (Fig. 6) were found to become much more complicated. Corresponding to the larger flapping amplitude (A = 11.2mm), the wake vortex structures in this cross plane were found to be stretched more seriously as they shed from the trailing edge of the piezoelectric flapping wing. As a result, the wake vortex structures were found to have much longer braids, instead of becoming highly concentrated wake vortices as those observed in the cross plane at 50% wingspan. Since the shedding process of the positive (counter-clockwise) vortices occurred at the end of the upstrokes, while the negative (clockwise) vortices at the end of the down strokes, the initial positions of the positive (counter-clockwise) wake vortices were found to be slightly above those of the negative (clockwise) wake vortices in the near wake region (X/C<3.5). Induced by the flapping motion of the piezoelectric flapping wing, the cores of the negative (clockwise) wake vortices were found to move upward, while those of the positive (counter-clockwise) wake vortices moving downward, as they travelling downstream. The trajectories of the negative (clockwise) and positive (counter-clockwise) wake vortex cores were found to cross over each other at the downstream location of X/C ≈ 3.5. Right before the crossing over of the trajectories of the negative (clockwise) and positive (counter-clockwise) vortex cores, the stretched wake vortex structures were found to break down with the braids of the wake vortex structures separated from their cores to form additional two rows of wake vortex structures. As a result, four rows of wake vortex structures with alternative rotation direction were found in the further downstream region in this cross plane. It can also be seen clearly that, corresponding to the formation of the four rows of the wake vortices, the wake flow in this cross plane was found to bifurcate into two jet-like flows. Such bifurcation phenomena were never observed or reported in previous experimental studies with 2-D flapping airfoils/wings. For each jet-like wake flow after the bifurcation, a row of clockwise (i.e., negative) wake vortices were found to be above the anti-clockwise (i.e., positive) wake vortices. According to Jones et al [17], such wake vortex configuration was called reversed von Karman vortex street configure for the incoming flow from left to right. It suggests that wake flow in this cross plane would be a thrust producing, which would result in momentum surfeits (i.e., thrust generation) in the transverse profiles of the time-averaged streamwise velocity in the wake of the piezoelectric flapping wing. The momentum surfeits in the time-averaged streamwise velocity profiles downstream the piezoelectric flapping wing were confirmed from the time-averaged PIV measurement results shown in Fig. 9. As shown in Fig. 7, the behavior of the wake vortex structures in the cross plane passing the wingtip were found to become much more involved due to the existence of additional wingtip vortex structures. The negative (clockwise) vortices shed at the end of the upstroke and the positive (counter-clockwise) vortices shed at the end of the down stroke were found to be stretched even more severely. After they shed from the trailing edge of the piezoelectric flapping wing, instead of forming concentrated vortices as those in the cross planes at 50% or 75% wingspan locations, the wake vortex structures in the cross plane passing the wingtip were found to be elongated significantly and broke down into smaller and weaker vortex structures rapidly. After broken down, the smaller and weaker wake vortex structures were found to align them in six rows as they travelling downstream. For each pair of the wake vortex rows, clockwise (i.e., negative) wake vortices were found to be above the anti-clockwise (i.e., positive) vortices, i.e., typical a reversed von Karman vortex street configuration. It suggests that wake in the cross plane passing the wingtip would also be thrust producing. The smaller and weaker wake vortex structures were found to be 9 American Institute of Aeronautics and Astronautics Y/C Y/C Y/C dissipated rapidly and eventually vanished at further downstream. Similar as that observed in the cross plane at 75% wingspan, bifurcation of the wake flow was also found to in this cross plane, which occurred at the downstream region of X/C>2.0. Figure 8 shows the time-averaged PIV measurements in the three cross planes at 50%, 75% U/U ∞ 4 0.80 0.84 0.88 0.92 0.96 1.00 1.04 1.08 1.12 1.16 1.20 and 100% wingspan. It can be seen clearly that, in the cross plane at 50% wingspan, the wake flow in the downstream region of the piezoelectric flapping wing was found to have a small region of high-speed 2 flow (i.e. the region with local streamwise flow velocity greater than the incoming flow, U∞) right downstream the trailing edge of the flapping wing, 0 followed by a long low-speed flow region with the local streamwise flow velocity being smaller than the incoming flow velocity, U∞ . Such a wake flow -2 pattern suggests that the wake flow in the cross plane at 50% wingspan would be mainly drag producing. 0 2 4 6 8 As shown in Fig. 8(b), the wake flow in the near X/C region downstream the piezoelectric flapping wing (a). Cross plane at 50% wingspan in the cross plane at the 75% wingspan was featured U/U ∞ by a high-speed jet-like flow with its streamwise 4 0.80 0.84 0.88 0.92 0.96 1.00 1.04 1.08 1.12 1.16 1.20 flow velocity much greater than the incoming flow velocity U∞ . The jet-like wake flow was found to bifurcate into two jets further downstream in the 2 region of X/C>4.0 (i.e., in the region after the crossing over of the trajectories of the positive and negative wake vortex cores revealed from the phaselocked PIV measurements). After the bifurcation, a 0 low-speed region was found to fill in the gap between the two high-speed jet-like flows at further downstream. -2 The high-speed jet-like flow in the near wake downstream the piezoelectric flapping wing was found to become much wider in the cross plane 0 2 4 6 8 X/C passing the wingtip (Fig. 8(c)) corresponding to the larger flapping amplitude at wingtip. The bifurcation (b). Cross plane at 75% wingspan of the jet-like wake flow was found to take place U/U ∞ much upstream (i.e. at the downstream locations of 4 0.80 0.84 0.88 0.92 0.96 1.00 1.04 1.08 1.12 1.16 1.20 X/C ≈ 2.5) compared with that in the cross plane at 75% wingspan. Corresponding with the six rows of wake vortex structures described above, the wake 2 flow was found to be separated into three jet-like flow streams with two low-speed regions filling in the space between the jet-like wake flow streams. 0 In order to reveal the variations of the characteristics of the wake flow of the fixed 3-D piezoelectric flapping wing in the cross planes at at different wingspan locations more quantitatively, the -2 transverse profiles of the time-averaged streamwise flow velocity at four typical downstream locations are shown in Fig. 9. As shown clearly in Fig. 9(a), 0 2 4 6 8 X/C the time-averaged streamwise velocity profiles in all (c). Cross plane at wingtip the three studied chordwise cross planes were found Fig. 8: Time-averaged PIV measurement results to be have quite similar pattern, i.e., jet-like profiles 10 American Institute of Aeronautics and Astronautics with momentum surfeits were found in the near wake downstream the flapping wing. Compared with that at 50% wingspan, the peak of the jet-like streamwise velocity profile at 75% wingspan was found to be much higher at the downstream location of X/D=2.0 (i.e., one chord length downstream the wing trailing edge). Corresponding the larger flapping amplitude at the wingtip, the high-speed jet-like wake was found to be much greater in the cross plane at the wingtip. The time-averaged streamwise velocity profiles in the cross plane at 50% wingspan at further downstream locations show obvious momentum deficits, which confirmed the drag producing nature of the wake flow in the cross plane at 50% wingspan. The momentum surfeits observed from the streamwise velocity profiles at 75% wingspan and 100% wingspan also reveals the thrust producing nature of the wake flow in the cross planes. It should also be noted that, despite the largest flapping amplitude at wingtip, the momentum surfeits in the cross plane at 75% wingspan were found to be much greater than those in the cross plane passing the wingtip. It indicates that more thrusts would be generated at 75% wingspan rather than at wingtip. The effects of additional wingtip vortices for the present root-fixed 3-D flapping wing were believed to be responsible for the smaller thrust generation at the wingtip compared with that at 75% wingspan. The bifurcation of the wake flow was also revealed quantitatively from the time-averaged streamwise velocity profiles in the cross planes passing 75% wingspan and wingtip as multiple high-speed velocity peaks were found in the profiles. 1.8 1.5 50% wingspan 75% wingspan 100% wingspan 1.7 1.6 1.3 1.5 U/U∞ 1.4 U/U∞ 50% wingspan 75% wingspan 100% wingspan 1.4 1.3 1.2 1.2 1.1 1.1 1.0 1.0 0.9 0.9 0.8 -3.5 -2.5 -1.5 -0.5 0.5 1.5 2.5 0.8 -3.5 3.5 -2.5 -1.5 -0.5 Y/C (a). X/C=2.0 2.5 3.5 1.5 50% wingspan 75% wingspan 100% wingspan 1.4 1.3 1.3 1.2 1.2 1.1 1.1 1.0 1.0 0.9 0.9 0.8 0.8 -2.5 -1.5 -0.5 0.5 1.5 2.5 50% wingspan 75% wingspan 100% wingspan 1.4 U/U∞ U/U∞ 1.5 (b). X/C=4.0 1.5 0.7 -3.5 0.5 Y/C 3.5 0.7 -3.5 -2.5 -1.5 Y/C -0.5 0.5 1.5 2.5 3.5 Y/C (c). X/C=6.0 (d). X/C=8.0 Fig. 10: The time-averaged streamwise velocity profiles in the wake region Concluding Remarks An experimental investigation was conducted to explore the potential applications of compact, gearless, piezoelectric flapping wings with the wing size, stroke amplitude and flapping frequency within the range of actual insect characteristics for the development of novel insect-sized Nano-Air-Vehicles (NAVs). Unlike most of previous 11 American Institute of Aeronautics and Astronautics studies with 2-D flapping airfoils, a fix-rooted 3-D flapping wing was used in the present study with the consideration of more practical configurations in NAV designs. The experimental study was conducted in a lowspeed wing tunnel with the test parameters of chord Reynolds number of Re = 1,200, reduced frequency of k = 3.5, and non-dimensional flapping amplitude at wingtip h = A/C = 1.3. The corresponding Strouhul number of the rootfixed 3-D piezoelectric flapping wing is Str = 0.30, which is within the optimal range of 0.2 < Str < 0.4 usually used by flying insects and swimming fishes. A digital particle image velocimetry (PIV) system was used to achieve phased-locked and time-averaged flow field measurements to quantify the formation of shedding process of the Leading Edge Vortex (LEV) structures on the upper and lower surfaces of the 3-D piezoelectric flapping wing in relation to the positions of the flapping wing during upstroke and down stroke motions. The evolutions of the wake vortex structures in the cross planes at 50% wingspan, 75% wingspan and 100% wingspan (i.e., wingtip) of the rootfixed 3-D flapping wings were compared quantitatively in order to elucidate underlying physics for better understanding of the unsteady aerodynamics of the flapping flight for the development of novel insect-sized, flapping-wing-based NAVs. The phase-locked PIV measurements revealed clearly that the formation and separation processes of the positive (clockwise) and negative (counter-clockewise) leading edge vortex (LEV) structures on the lower and upper surface of the 3-D flapping wing at different wingspan locations were quite similar. A negative (clockwise) LEV would be formed on the upper surface of the flapping wing as each down stroke of the flapping motion starts. Meanwhile, a negative (clockwise) wake vortex formed during previous down stoke cycle would shed from the trailing edge of the flapping wing as a wake vortex. During each down stroke, while growing up in size and becoming stronger, the negative (clockwise) LEV on the upper surface would stay attached to the leading edge firmly all the way until the down stroke ends. As the following upstroke starts, the negative (clockwise) LEV on the upper surface would separate from the leading edge and moved downstream to approach the trailing edge of the wing. During the upstroke of the flapping motion, the separated negative (clockwise) LEV on the upper surface would be stretched and eventually shed from trailing edge of the flapping wing as the upstroke ends. Similar scenario were experienced by the positive (counter-clockwise) LEV structures, which were found to form on the lower surface at the beginning of the upstrokes and shed from the trailing edge at the end of the down strokes. The evolutions of the wake vortex structures in the cross planes at 50%, 75% and 100% wingspan were found to be quite varied significantly. After shed from the wing trailing edge, the wake vortices were found to be highly concentrated vortex structures in the cross plane at 50% wing span. As they travelling downstream, the concentrated wake vortices were found to align them nicely in two parallel rows with the clockwise (i.e., negative) vortices above and anticlockwise (i.e., positive) vortices below, which is a typical von Karman vortex street wake configuration for the incoming flow from left to right. As expected, momentum deficits in the time-averaged streamwise velocity profiles (i.e., drag-producing wake) were confirmed for the wake flow in the cross plane at 50% wingspan. The wake vortex structures were found to be stretched to have long braids in the cross planes at 75% wingspan. As they travelling downstream, the stretched wake vortex structures were found to break down with the braids of the vortex structures separated from the core potion to form additional two rows of smaller and weaker vortex structures. As a result, four rows of wake vortex structures were found in the wake region in the cross plane at 75% wingspan, the wake flow was found to bifurcate into two jet-like wakes. For each jet-like wake, the clockwise (i.e., negative) vortices were found to be above the anti-clockwise (i.e., positive) vortices, which represents a reversed von Karman vortex street configure for the incoming flow from left to right. It indicates that the wake flow in the cross plane at 75% wingspan was thrust producing, which was confirmed from the time-averaged PIV measurement results. Due to the additional effects of the wingtip vortex structures, the evolution of the wake vortex structures in the cross plane passing the wingtip were found to become much more involved. Although the flapping amplitude at the wingtip was much larger than that at 75% wingspan, the momentum surfeits in wake at wingtip was found to be much less compared with that at 75% wingspan. It suggests that the effects of the wingtip vortex would be detrimental for a root-fixed 3-D flapping wing in the term of thrust generation. Acknowledgments The authors also want to thank Mr. Bill Rickard of Iowa State University for his help in conducting the wind tunnel experiments. The support of National Science Foundation CAREER program under award number of CTS0545918 is gratefully acknowledged. 12 American Institute of Aeronautics and Astronautics References 1. Defense Advanced Research Projects Agency (DARPA), BAA 06-06 Proposer Information Pamphlet: Nano Air Vehicle (NAV) Program, (Washington D.C.: Defense Sciences Office, 2006), 5. on-line, Internet, available from http://www.darpa.mil/dso/solicitations/BAA06-06_sect2.pdf. 2. R. J. Wood, “The First Takeoff of a Biologically Inspired At-Scale Robotic Insect”, IEEE TRANSACTIONS ON ROBOTICS, VOL. 24, NO. 2, pp341-347, 2008. 3. Youngren, H., Kroninger, C., Chang, M., Jameson, S., 2008, Low Reynolds Number Testing of the AG38 Airfoil for the SAMARAI Nano Air Vehicle. AIAA 2008-417, 46th AIAA Aerospace Sciences Meeting and Exhibit, 7 10 January 2008, Reno, Nevada. 4. Mueller T. J., (ed.), Fixed and Flapping Wing Aerodynamics for Micro Air Vehicle Applications (Progress in Astronautics and Aeronautics), ISBN 1-56347-517-0 (2001). 5. Bohorquez, F., Samuel, P., Sirohi, J., Pines, D., Rudd, L., and Perel, R., “Design Analysis and Hover Performance of a Rotating Wing Micro Air Vehicle,” Journal of the American Helicopter Society, Vol. 48, No. 2, April 2003, pp. 80–90. 6. Ramasamy, M., Leishman, J. G., and Lee, T. E., “Flow Field of a Rotating Wing MAV,” 62nd Annual National Forum Proceedings of the American Helicopter Society, 2006. 7. Sunada S., and Ellington, C. P., “A new method for explaining the generation of aerodynamic forces in flapping flight,” Math. Methods Appl. Sci., vol. 24, pp. 1377–1386, 2001. 8. Dickinson, M. H., Lehmann, F.-O. and Sane, S. P,. “Wing rotation and the aerodynamic basis of insect flight,” Science, vol. 284, pp. 1954–1960, Jun. 1999. 9. Niezrecki, C., Brei, D., Balakrishnan, S., Moskalik, A., Piezoelectric actuation: state of the art, The Shock and Vibration Digest 33 (2001) 269–280. 10. Toda, M., Voltage-induced large amplitude bending device – PVF2 bimorph – its properties and applications, Ferroelectrics 32 (1981) 911. 11. Yoo, J. Hong, W. Cao, Piezoelectric ceramic bimorph coupled to thin metal plate as cooling fan for electronic devices, Sensors & Actuators A 79 (2000) 8–12. 12. Wu, P. Ro, Kingon, A. Mulling, J., Piezoelectric resonating structures formicroelectronic cooling, Smart Materials & Structures 12 (2003) 181–187. 13. Cox, A., Monopoli, D., Cveticanin, D., Goldfarb, M., Garcia, E., The development of elastodynamic components for piezoelectrically actuated flapping micro air vehicles, Journal of Intelligent Material Systems and Structures 13 (2002) 611–615. 14. Park, H.C., Kim K.J., Lee, S., Lee, S.Y., Cha, Y.J., Yoon, K.J., Goo, N.S., Biomimetic flapping devices powered by artificial muscle actuators, in: UKC2004 US–Korea Conference on Science, Technology and Entrepreneurship, August 2004. 15. Garrick, I. E., “Propulsion of a Flapping and Oscillating Airfoil,” NACA Rept. 567, May 1936. 16. Freymuth, P., “Propulsive Vortical Signatures of Plunging and Pitching Airfoils,” AIAA Journal, Vol. 26, No. 7, 1988, pp. 881–883. 17. Jones, K. D., Dohring, C. M., and Platzer, M. F., “Wake Structures Behind Plunging Airfoils: A Comparison of Numerical and Experimental Results,” 34th Aerospace Sciences Meeting and Exhibit, Reno, NV, AIAA Paper 96-0078, 1996 18. Lai, J. C. S., and Platzer, M. F., “Jet Characteristics of a Plunging Airfoil,” AIAA Journal, Vol. 37, No. 12, 1999, pp. 1529–1537. 19. Lewin, G. C., and Haj-Hariri, H., “Modelling Thrust Generation of a Two-Dimensional Heaving Airfoil in Viscous Flow,” Journal of Fluid Mechanics, Vol. 492, Oct. 2003, pp. 339–362. 20. Young, J., and Lai, J. C. S., “Oscillation Frequency and Amplitude Effects on the Wake of a Plunging Airfoil,” AIAA Journal, Vol. 42, No. 10, 2004, pp. 2042–2052. 21. Bohl, D. G. and Koochesfahani, 2009, MTV measurements of the vortical field in the wake of an airfoil oscillating at high reduced frequency. J. Fluid Mech. (2009), vol. 620, pp. 63–88. 22. Koochesfahani, M. M., 1989, "Vortical patterns in the wake of an oscillating airfoil," AIAA J., 27(9), 1200-1205. 23. Triantafyllou, G. S., Triantafyllou, M. S. & Grosenbaugh, M. A. (1993), Optimal thrust development in oscillating foils with application to fish propulsion. J. Fluids Struct. Vol.7, pp205–224. 24. Taylor, G. K., Nudds, R. L., and Thomas, A. L. R., (2003) Flying and Swimming Animals Cruise at a Strouhal Number Tuned for High Power Efficiency, Nature (London), Vol. 425, pp. 707–711. doi:10.1038/nature02000. 13 American Institute of Aeronautics and Astronautics