Analysing Designed Experiments in Distance Sampling
advertisement

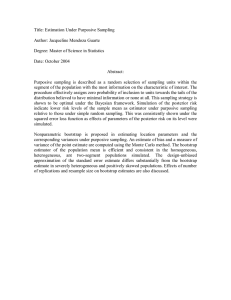
Analysing Designed Experiments in Distance Sampling Stephen T. BUCKLAND, Robin E. RUSSELL, Brett G. DICKSON, Victoria A. SAAB, Donal N. GORMAN and William M. BLOCK Distance sampling is a survey technique for estimating the abundance or density of wild animal populations. Detection probabilities of animals inherently differ by species, age class, habitats, or sex. By incorporating the change in an observer’s ability to detect a particular class of animals as a function of distance, distance sampling leads to density estimates that are comparable across different species, ages, habitats, sexes, etc. Increasing interest in evaluating the effects of management practices on animal populations in an experimental context has led to a need for suitable methods of analysis of distance sampling data. We outline a two-stage approach for analysing distance sampling data from designed experiments, in which a two-step bootstrap is used to quantify precision and identify treatment effects. The approach is illustrated using data from a before-after control-impact experiment designed to assess the effects of large-scale prescribed fire treatments on bird densities in ponderosa pine forests of the southwestern United States. Key Words: BACI design; Bootstrap; Distance sampling; Point transect sampling _____________________________ Stephen T. Buckland is Professor of Statistics, University of St Andrews, Centre for Research into Ecological and Environmental Modelling, The Observatory, Buchanan Gardens, St. Andrews KY16 9LZ, Scotland (E-mail: steve@mcs.st-and.ac.uk). Robin E. Russell is Post-doctoral Research Ecologist, US Forest Service, Rocky Mountain Research Station, 1648 S. 7th Ave, Montana State University Campus, Bozeman, MT 59717, USA. Brett G. Dickson is David H. Smith Conservation Research Fellow, Center for Environmental Sciences and Education, Northern Arizona University, Flagstaff, AZ 86001, USA. Victoria A. Saab is Research Wildlife Biologist, US Forest Service, Rocky Mountain Research Station, 1648 S. 7th Ave, Montana State University Campus, Bozeman, MT 59717, USA. Donal N. Gorman is a student in the School of Mathematics and Statistics, University of St Andrews, funded for this project under the University of St Andrews Undergraduate Research Internship Programme. William M. Block is Program Manager, US Forest Service, Rocky Mountain Research Station, Southwest Forest Science Complex, 2500 South Pine Knoll Dr., Flagstaff, AZ 86001, USA. 1. INTRODUCTION Distance sampling (Buckland et al. 2001, 2004) comprises a suite of methods for estimating animal density. The most commonly-used methods are line and point transect sampling. Increasingly, the methods are being used in the context of designed experiments, for example to assess the impact of forest restoration and fuel reduction activities on bird communities (Dickson et al. in press; Russell et al. in press). When the goal of a distance sampling study is to estimate overall abundance in a region, there is no particular need to model heterogeneity in probability of detection of animals, provided that the key assumption that animals on the line or at the point are certain to be detected is met. This arises from the pooling robustness property of distance sampling estimates, a proof of which is given by Buckland et al. (2004:389-392). However, in the context of designed experiments, animal densities are typically needed by plot, and plot-specific estimates may be biased in the presence of unmodelled heterogeneity in the detection probabilities, unless a separate detection function (which expresses the probability of detection as a function of distance from the line or point) is estimated for each plot. Few studies are sufficiently large to allow this, so that the natural way to analyse data from designed experiments is to use multiple-covariate distance sampling (Marques and Buckland 2003, 2004; Marques et al. 2007). If detection is not certain on the line or point, then mark-recapture distance sampling (Laake and Borchers 2004; Borchers et al. 2006) might be used. In either case, a single detection function model is fitted to observations from all plots, so that plot-specific density estimates are not independent. In this paper, we develop a strategy for analysing such data. Commonly in designed distance sampling experiments, multiple species are recorded. The analyses may have more power for detecting treatment effects if data for species that are expected to show a similar response to treatment are pooled in a single analysis. This can be achieved in the above context without having to assume equal detectability across species by including species as a factor-type covariate in the multiplecovariate distance sampling analysis (Alldredge et al. 2007; Marques et al. 2007). We illustrate our approach using an experiment to assess the effects of prescribed fire treatments on bird densities in ponderosa pine- (Pinus ponderosa) dominated forests in the southwestern United States using a before-after control-impact (BACI) study (Stewart-Oaten and Bence 2001). We selected two species of warbler common in ponderosa pine forests of the Southwest, Grace’s warbler (Dendroica graciae) and yellow-rumped warbler (Dendroica coronata), to demonstrate our methodology. Both species are foliage insectivores and nest in open cup nests located in the canopy. In their review of fire effects on avian communities in the southwestern United States, Bock and Block (2005) report negative responses of both species to wildfire. We expected declines in these species after prescribed fire due to reduced opportunities for foraging and nesting. 2. METHODS In the following, we assume that the units for analysis are plots (e.g., a prescribed fire treatment), where each plot has a number of line or point transects randomly placed within the plot. Typically, lines or points will be systematically placed through the plot, but assumed random. See Fewster et al. (in press) for a detailed discussion of this. Commonly, as in our example below, the same plot may be surveyed in more than one time period, say year. In that case, the units for analysis will be a ‘plot-year’. For simplicity, we simply refer to these units as ‘plots’. The basic data in distance sampling experiments are, for each plot, a count of number of animals or animal clusters detected, together with distances of detections from the line or point for estimating detectability. If all animals have the same probability of detection, the counts are estimates of relative abundance in their own right, so that we can simply analyse them, for example using Poisson regression (Brand and George, 2001); if effort varies between plots, the log link function of this model enables this to be accommodated using an appropriate offset term. We consider here how that strategy might be extended to the more plausible case of variable detectability. 2.1 LINE TRANSECT SAMPLING Suppose we have K plots, laid out according to some design, and consider first line transect sampling. We will suppose that animals occur in clusters; if they do not, then cluster size is set to unity in the following. We can estimate density in plot k as 1 Dˆ k = 2l k nk ∑s i =1 i fˆy|z (0 | z i ) (2.1) where lk = total effort conducted on plot k (total line length if each line is covered once) nk = number of animal clusters detected on plot k si = number of animals in ith detected cluster on plot k fˆy | z ( y | z i ) = estimated pdf of distance y from the line for ith detected cluster on plot k, for which covariates z i were recorded fˆy |z (0 | z i ) = fˆy | z ( y | z i ) evaluated at y = 0 . The above result is obtained by converting the expression for M̂ from section 4.2 of Marques and Buckland (2003) into a density, by dividing through by the covered area, 2wlk , where w is the truncation distance for y (i.e. it is the half-width of the covered strip). We can express (2.1) as H Dˆ k = nk k 2lk where H k = 1 nk nk ∑ s fˆ i =1 i y|z (0 | z i ) is the sample mean of the product si fˆy | z (0 | z i ) , where the mean is taken over detections on plot k. (If nk = 0 , we might estimate H k by the mean of this product across all detections from other plots.) If the H k were known constants, it would be natural to model the counts using a generalized linear model (GLM) with a Poisson or negative binomial error distribution, a log link function and an offset of − log e (H k / 2lk ) : ⎛ p ⎞ E (nk ) = exp⎜⎜ ∑ x jk β j − log e (H k / 2lk )⎟⎟ ⎝ j =1 ⎠ where the x’s are determined by the design matrix, and the β are the corresponding parameters. We will consider how to accommodate uncertainty in estimation of H k below. 2.2 POINT TRANSECT SAMPLING For point transect sampling, (2.1) is replaced by 1 Dˆ k = 2πek nk ∑ s hˆ i =1 i y|z (0 | z i ) (2.2) where ek = total effort conducted on plot k (number of points on plot multiplied by (mean) number of visits per point) nk = number of animal clusters detected on plot k si = number of animals in ith detected cluster on plot k hˆy |z ( y | z i ) = fˆy′| z ( y | z i ) = slope of estimated pdf of distance y from the point for ith detected cluster on plot k, for which covariates z i were recorded hˆy |z (0 | z i ) = hˆy | z ( y | z i ) evaluated at y = 0 . Equation (2.2) is obtained by dividing Equation (3.44) of Marques and Buckland (2004) by the covered area, ekπw2 . We can now write H Dˆ k = nk k 2πek 1 where H k = nk nk ∑ s hˆ i =1 i y|z (0 | z i ) , and then proceed as for line transect sampling. 2.3 QUANTIFYING PRECISION A two-stage bootstrap allows uncertainty arising from estimating H k to be accounted for. For a given bootstrap resample, we first generate a resample of the distances of detections from the line or point. If there is an adequate number of replicate lines or points on each plot (say at least ten), this can be achieved by resampling lines or points with replacement for each plot. Note that if a line or point is selected for a resample, data (including any relevant covariates) from all visits to that line or point are included. If for example the same lines or points are visited in more than one year, this strategy ensures that we do not assume that the data recorded from the line or point in different years are independent. For each resample, we re-estimate the H k and hence the offset. We also find the counts for each resample on each plot (or each plot-year if for example a plot is surveyed each year), and these counts are modelled using a Poisson or negative binomial GLM. At each stage, we could condition on the model selected for the original data, or reassess which model was best in each resample, as judged for example by Akaike’s information criterion (AIC), to allow for model uncertainty. If there is insufficient replication in the design, so that there are too few lines or points per plot for the above strategy, the naïve bootstrap might be used, where distances yi are resampled along with the associated covariates z i . Another option is to condition on z i , and generate a parametric bootstrap resample from the fitted model for f y | z ( y | z ) . We then estimate the H k for the resample. Neither of these options generates variation in the count, so we cannot now proceed to the second stage as before. Instead, for each resample, we could condition on the estimates of H k obtained from stage one, and generate a bootstrap resample corresponding to the GLM. This could be a parametric bootstrap resample, obtained by generating bootstrap counts from the fitted model, or the probability integral transform resampling method might be used (Bravington 1994; Borchers et al. 1997). The latter method has the advantage that overdispersion is preserved in the resamples when a quasi-Poisson GLM is used. 3. EXAMPLE: PONDEROSA PINE PRESCRIBED FIRE STUDY 3.1 STUDY DESIGN Four National Forests in the southwestern United States were selected as study sites: the Kaibab, Coconino, and Apache-Sitgreaves National Forests in Arizona, and the Gila National Forest in New Mexico. On each site, a 247–405-ha prescribed fire treatment plot was paired with one (Coconino and Gila) or two (Apache-Sitgreaves and Kaibab) control plots of similar extent and vegetation composition. In our analyses, for sites with two control plots, we combine the data on the control plots as if they had been a single contiguous plot. Although overstory vegetation on each site was dominated by ponderosa pine, other common tree species included Gambel oak (Quercus gambelii) and alligator juniper (Juniperus deppeana) at lower elevations and Douglas fir (Pseudotsuga menziesii) at higher elevations in New Mexico (Dickson 2006, Saab et al. 2006). The four sites were surveyed for birds annually from 2003 to 2005. Prescribed fire treatments were implemented by US Forest Service District personnel and completed in the fall of 2003 (Apache-Sitgreaves and Coconino) and spring of 2004 (Gila and Kaibab). Each treatment was characterized by fire behaviors of low to moderate intensity (see also Dickson 2006). For each pair of plots, one was burned and the other was not. This was therefore a BACI design, and we are interested in the treatment by year interaction, as under the alternative hypothesis that burning affects bird densities, we expect any change from preburning to post-burning to differ between burn and control plots. Point count sampling was conducted at 25-50 points per plot, where points were located at least 250m apart and 150m from the edge of the study plot. Point counts began just after the dawn chorus and were completed within five hours. Each point was surveyed either three or four times during the breeding season between late May and early July. At each point, observers recorded all birds detected for five minutes and used a laser rangefinder to estimate the distance between the observer and the detected bird as 0-10 m, 10-25 m, 25-50 m, 50-75 m, 75-100 m and > 100 m (Birds and Burns Network 2003; Dickson 2006). Several covariates that might affect detectability were recorded: site, plot, cluster size (number of birds in a detected group), visit number, observer, species, and year. Additionally, information regarding the vegetation surrounding the point count was collected including large (>23 cm dbh) tree and snag densities, and fire effects data to compute a composite burn severity index (Key and Benson 2005; see Saab et al. (2006) for detailed vegetation sampling description). 3.2 ESTIMATING THE DETECTION FUNCTION We analyse here data on two warblers: Grace’s warbler and the yellow-rumped warbler. As both species were expected to show a similar response to burning, we pooled the data from the two species to increase power. (A more comprehensive analysis would also analyse the two species separately.) A truncation distance of w = 100 m was found to be adequate (Figure 1), leaving n = 2300 detections. (Choice of truncation distance is discussed by Buckland et al., 2001:15-17.) The multiple covariate distance sampling (MCDS) engine of Distance (Thomas et al. 2006) was used, and AIC used to identify a suitable detection function model (Table 1). The hazard-rate model with year as a factor and tree and snag density as covariates was found to fit the data well (Figure 1). Note that the covariate species was not selected; the two warbler species gave nearly identical estimated detection functions. Estimated detection probabilities were lower at points with high tree density, and slightly lower at points with high snag density. 3.3 MODELLING THE PLOT COUNTS The glm command of the statistical package R (R Development Core Team 2007) was used to fit a Poisson model to the warbler plot counts (Table 2). The counts analysed were the sum of counts across the two species, the points on the plot, and the visits made within a year, giving rise to 24 counts (four sites by two plots per site by three years). To estimate the offset, the hazard-rate detection function model with year as a factor and tree and snag density as continuous covariates was used. The number of visits to each point (i.e. the effort) was also included in the offset. AIC selected the model with all twofactor interactions but no three-factor interaction (Table 2). We also tried adding covariates (averaged across the points within the plot for each year) – tree density, snag density and burn index – to this model, but none led to a reduction in the AIC score, and so they were not included. (Thus covariates were included in the model for detectability, and hence in the offset of the count model, but were not included in the linear predictor of the count model.) When a model with the same structure but with a negative binomial error distribution was fitted (using the glm.nb command from the MASS package in R, Venables and Ripley 2002), the limiting form corresponding to Poisson regression was obtained, so results were unaffected. Similarly, as the residual deviance under this model (6.04, Table 2) is almost equal to the degrees of freedom (6), inference is unaffected if a quasi-Poisson regression is conducted. The above analysis makes no allowance for the estimation of the offset, so that both the analytic standard errors and AIC may be unreliable guides to model selection. We therefore calculated bootstrap standard errors and 95% and 99% percentile confidence intervals for parameters based on 999 bootstrap resamples. To generate nonparametric bootstrap resamples, points were resampled within plots, and each resample analysed using the same methods as for the real data. The bootstrap analyses allow for any dependence between counts at the same point across years, and for estimation of the offset, and we see that the standard errors are larger on average than the analytic ones (Table 3). If prescribed burning affected bird density, we would hope to detect a treatment by year interaction, because the treatment covariate distinguished between treatment and control plots, but did not reflect whether the treatment had yet been applied. Just two of the bootstrap standard errors of Table 3 are (slightly) smaller than the analytic ones, but these both correspond to the treatment by year interaction. Inference is therefore unaffected in this case; we have strong evidence of reduced bird densities on burned plots in the year following burning (the year2×treatment2 term of Table 3), and moderate evidence that the effect continues into a second year (the year3×treatment2 term of Table 3). Our results provide evidence that the among-year differences were not consistent across sites, and that an interaction between type of plot (treatment or control) and site existed. Although the analytic results gave strong evidence of a difference between treatment and control plots (see the treatment2 term in Table 3), when uncertainty arising from estimation of the offset and possible dependence in repeat counts at a site across years were taken into account, the 95% bootstrap confidence interval for the difference between treatment and control plots (just) included zero. 4. DISCUSSION Ecological experiments can be difficult and costly to implement, but inference from these studies is stronger than from correlative or observational designs. Adequate replication is often difficult due to the inherent spatial variability in ecosystems, and the costs and logistics that limit numbers of replicate plots. Attempts should be made to maximize the number of replicates given available resources, and to minimize ecological differences in study locations. Developing methods to analyse data resulting from BACI experiments is vital for providing land management agencies with guidelines regarding the impacts of their management decisions (Block et al. 2001). In this context, and including the data we analysed, Dickson et al. (in press) demonstrated the utility of a BACI design to quantify the multi-scale (i.e. plot and point level) response of bird density to prescribed fire using spatial mixed effect models. Similarly, the methods presented in this paper extend readily to generalized additive models, and random effects are easily accommodated through the use of generalized linear mixed models (an extension of the count models advocated by McDonald et al., 2000, to allow for uncertain detectability) or generalized additive mixed models. In our example, we might prefer to make site a random effect, which can be achieved by loading the glmm library in R. To gain full benefit from such an approach, it might be preferable to have more pairs of plots in the design, with fewer points sampled per plot. However, the extra costs involved in accessing and burning more sites can be substantial. In implementing the first stage of the bootstrap resampling to quantify precision of H k in the prescribed fire study, we conditioned on the hazard-rate detection function model with variables tree and snag as continuous covariates and year as a factor, because the other models considered all had a ΔAIC value exceeding 4. Where the choice of detection function model is less clear-cut, model uncertainty is readily accommodated in the bootstrap by selecting the detection function model with smallest AIC from each resample analysis, instead of conditioning on the model selected for the original data. Similarly, at stage two of the bootstrap, we could reselect from the possible count models using say AIC, although this complicates inference as most parameters would be included in the model used to analyse some resamples, but absent from the model used for others. It is simpler to use the model selected by AIC based on the real data, then to use the bootstrap confidence intervals to assess whether any of the parameters of that model could be omitted. We have demonstrated a flexible, efficient, and quantitatively robust method of analysing ecological experiments to evaluate changes in wildlife abundance in response to habitat alterations or other interventions. ACKNOWLEDGMENTS We thank Stephanie Jentsch for key contributions to the design and supervision of the data collection effort. Lisa Bate summarized the vegetation data. Personnel with the Gila, Apache-Sitgreaves, Coconino, and Kaibab National Forests provided logistical support for the project and implemented the treatments. Funding was provided by the Joint Fire Science Program and U.S. Forest Service, Rocky Mountain Research Station, research work unit numbers 4156, 4852, and 4251. We thank Rudy King, Barry Noon, Eric Rexstad and Len Thomas, who provided internal reviews of an earlier draft, and the referee and associate editor. Their comments led to a much improved paper. REFERENCES Alldredge, M.W., Pollock, K.H., Simons, T.R., and Shriner, S.A. (2007), “Multiple species analysis of point count data: a more parsimonious modeling framework,” Journal of Applied Ecology, 44, 281-290. Birds and Burns Network (2003), “Point count protocol.” (http://www.rmrs.nau.edu/wildlife/birdsnburns/info_partic.shtml) [last accessed: October 1, 2008]. Block, W. M., Franklin, A.B., Ward, Jr., J.P., Ganey, J., and White, G.C. (2001), “Design and implementation and monitoring studies to evaluate the success of ecological restoration on wildlife,” Restoration Ecology, 9, 293-303. Bock, C.E., and Block, W.M. (2005), “Fire and birds in the southwestern United States,” Studies in Avian Biology, 30, 14-32. Borchers, D.L., Buckland, S.T., Priede, I.G., and Ahmadi, S. (1997), “Improving the precision of the daily egg production method using generalized additive models,” Canadian Journal of Fisheries and Aquatic Sciences, 54, 2727-2742. Borchers, D.L., Laake, J.L., Southwell, C., and Paxton, C.G.M. (2006), “Accommodating unmodeled heterogeneity in double-observer distance sampling surveys,” Biometrics, 62, 372-378. Brand, L.A., and George, T.L. (2001), “Response of passerine birds to forest edge in coast redwood forest fragments,” The Auk, 118, 678-686. Bravington, M. (1994), “The effects of acidification on the population dynamics of brown trout in Norway,” unpublished PhD thesis, Imperial College, London. Buckland, S.T., Anderson, D.R., Burnham, K.P., Laake, J.L., Borchers, D.L., and Thomas, L. (2001), Introduction to Distance Sampling, Oxford: Oxford University Press. Buckland, S.T., Anderson, D.R., Burnham, K.P., Laake, J.L., Borchers, D.L., and Thomas, L. (eds) (2004), Advanced Distance Sampling, Oxford: Oxford University Press. Dickson, B.G. (2006), “Multi-scale response of avian communities to prescribed fire: implications for fuel management and restoration treatments in southwestern ponderosa pine forests.” Dissertation, Colorado State University, Fort Collins, Colorado, USA. Dickson, B.G., Noon, B.R., Flather C.H., Jentsch, S., and Block, W.M. (in press), “Quantifying the multi-scale response of avifauna to prescribed fire experiments in the Southwest,” Ecological Applications. Fewster, R.M., Buckland, S.T., Burnham, K.P., Borchers, D.L., Jupp, P.E., Laake, J.L., and Thomas, L. (in press), “Estimating the encounter rate variance in distance sampling,” Biometrics. Key, C.H., and Benson, N.C. (2005), “Landscape assessment: ground measure of severity, the composite burn index; and remote sensing of severity, the normalized burn ratio,” in FIREMON: Fire Effects Monitoring and Inventory System, eds D.C. Lutes, R.E. Keane, J.F. Caratti, C.H. Key, N.C. Benson, S. Sutherland, and L.J. Gangi, Ogden, UT: USDA Forest Service, Rocky Mountain Research Station. General Technical Report RMRS-GTR-164-CD: LA1-51. Laake, J.L., and Borchers, D.L. (2004), “Methods for incomplete detection at distance zero,” in Advanced Distance Sampling, eds S.T. Buckland, D.R. Anderson, K.P. Burnham, J.L. Laake, D.L. Borchers, and L. Thomas, Oxford: Oxford University Press, pp109-189. Marques, F.F.C., and Buckland, S.T. (2003), “Incorporating covariates into standard line transect analyses,” Biometrics, 59, 924-935. Marques, F.F.C., and Buckland, S.T. (2004), “Covariate models for the detection function,” in Advanced Distance Sampling, eds S.T. Buckland, D.R. Anderson, K.P. Burnham, J.L. Laake, D.L. Borchers, and L. Thomas, Oxford: Oxford University Press, pp31-47. Marques, T.A., Thomas, L., Fancy, S.G., and Buckland, S.T. (2007), “Improving estimates of bird density using multiple covariate distance sampling,” The Auk, 124, 1229-1243. McDonald, T.L., Erickson, W.P., and McDonald, L.L. (2000), “Analysis of count data from before-after control-impact studies,” Journal of Agricultural, Biological, and Environmental Statistics, 5, 262-279. R Development Core Team (2007), R: A Language and Environment for Statistical Computing, Vienna: R Foundation for Statistical Computing. url: http://www.rproject.org/ [last accessed: October 1, 2008]. Russell, R.E., Royle, J.A., Saab, V.A., Lehmkuhl, J.F., Block, W.M. and Sauer, J.R. (in press), “Modeling the effects of environmental disturbance on wildlife communities: avian responses to prescribed fire treatments in a coniferous forest in Washington,” Ecological Applications. Saab, V., Bate, L., Lehmkuhl, J., Dickson, B., Story, S., Jentsch, S., and Block, W. (2006), “Changes in downed wood and forest structure after prescribed fire in ponderosa pine forests,” in Proceedings of the 1st Fire Behavior and Fuels Conference: Fuels Management – How to Measure Success, eds P.L. Andrews, and B.W. Butler, Ft. Collins, CO: U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station, pp. 477- 487. Stewart-Oaten, A., and Bence, J.R. (2001), “Temporal and spatial variation in environmental impact studies,” Ecological Monographs, 71, 305-339. Thomas, L., Laake, J.L., Strindberg, S., Marques, F.F.C., Buckland, S.T., Borchers, D.L., Anderson, D.R., Burnham, K.P., Hedley, S.L., Pollard, J.H., Bishop, J.R.B., and Marques, T.A. (2006), Distance 5.0. Release 2, University of St Andrews: Research Unit for Wildlife Population Assessment. http://www.ruwpa.st-and.ac.uk/distance/ [last accessed: October 1, 2008]. Venables, W.N., and Ripley, B.D. (2002), Modern Applied Statistics with S, 4th edn, London: Springer. Table 1. AIC scores for selected models for the detection function. Potential continuous covariates were shrub stem density, large tree density, snag density, and a burn severity index, while factor covariates considered for inclusion were year at three levels (2003, 2004, 2005) and species at two levels (Grace’s warbler, yellow-rumped warbler). A stepwise procedure was adopted for inclusion of covariates; the covariate giving rise to the greatest improvement in AIC was selected at each step, until no additional covariate reduced the AIC score. The fitted detection function corresponding to the model selected by AIC was gˆ ( y ) = 1 − exp[−( y / σˆ ) −1.63 ] where σˆ = 56.2 exp[−0.0024t i − 0.0100u i + 0.37ci + 0.22d i ] , and ti is tree density, ui is snag density, ci is 1 if observation i was for year 2003 and 0 otherwise, and di is 1 if observation i was for year 2004 and 0 otherwise. Median tree density was 140 km-2, and median snag density 2.5 km-2. Key function Continuous covariates Factor covariates ΔAIC Half-normal Half-normal Half-normal Half-normal Hazard-rate Hazard-rate Hazard-rate Hazard-rate None None Tree Tree, Snag None Tree Tree, Snag Tree, Snag None Year Year Year None None None Year 25.26 20.63 16.94 16.89 16.57 10.14 4.69 0.00 Table 2. Analysis of deviance of warbler analyses, treating the values of the offset as known constants, Poisson error model. Note that the factor ‘treatment’ refers to whether a plot is a prescribed fire treatment or a control plot. df deviance resid. df resid. dev. Null model + site + year + treatment + site×year + site×treatment + year×treatment + site×year×treatment 3 2 1 6 3 2 6 923.34 69.13 11.33 81.64 109.51 10.70 6.04 23 20 18 17 11 8 6 0 1211.69 288.35 219.23 207.89 126.25 16.74 6.04 0.00 AIC 191.1 184.4 190.4 Table 3. Poisson model: estimated coefficients and standard errors. Linear predictor: intercept + site + year + treatment + site×year + site×treatment + year×treatment. Levels of site are Apache-Sitgreaves (site1), Coconino (site2), Gila (site3) and Kaibab (site4); levels of year are 2003 (year1), 2004 (year2) and 2005 (year3); levels of treatment are control (treatment1) and burn (treatment2). Term Estimate Intercept site2 site3 site4 year2 year3 treatment2 site2×year2 site3×year2 site4×year2 site2×year3 site3×year3 site4×year3 site2×treatment2 site3×treatment2 site4×treatment2 year2×treatment2 year3×treatment2 -11.999 1.485 0.607 1.176 0.729 0.947 -0.523 0.004 -0.591 -0.041 -0.209 -1.680 -0.637 1.105 1.618 0.387 -0.378 -0.242 Analytic std. error 0.212** 0.223** 0.257* 0.230** 0.248** 0.236** 0.199** 0.259 0.290* 0.268 0.246 0.297** 0.258* 0.188** 0.232** 0.199 0.116** 0.116* Bootstrap std. error 0.317** 0.310** 0.345* 0.336** 0.311* 0.273** 0.264 0.305 0.329 0.323 0.264 0.340** 0.292* 0.268** 0.314** 0.289 0.111** 0.111* *Estimate differs significantly from zero (5% level) using z-test (analytic standard error) or percentile c.i. (bootstrap) **Estimate differs significantly from zero (1% level) using z-test (analytic standard error) or percentile c.i. (bootstrap) 0.8 0.4 0.2 0.0 0.0 0 20 40 60 80 100 Distance from point (m) 1.0 0.8 0.6 0.4 0.2 0 20 40 60 Distance from point (m) 0 20 40 60 Distance from point (m) 0.0 Detection probability 0.6 Detection probability 0.6 0.4 0.2 Detection probability 0.8 1.0 1.0 1.2 Figure 1. Estimated detection function by year for Grace’s and yellow-rumped warblers, pooling over values of continuous covariates tree and snag density. Years 2003 (top left), 2004 (top right) and 2005 (bottom left). Note that the histogram bars represent number of detections divided by distance from the point; this transformation allows the fit of the detection function to the data to be assessed visually (Buckland et al., 2001:147-150). 80 100 80 100