Document 11583256
advertisement

77-412
ASSUMED DISFI.ACEMENT HYBRIO FINITE ELEMENT hIETI100
FOR NONLINEAR ELASTIC AND ELASTIC-PLASTIC ANALYSES
J.S. Cheng
Rockwell International
B-1 Division
Los Angclcs. California 90009
S.N. Atluri*
Georgia Inst. of Tech.
Dept. of Engr. Sci. B Mech.
Atlanta, Georgia 30332
Abstract
11.- Theoretical Background
This papcr presents the detailed methodologies
related to nonlinear elastic and elastic-plastic
analyses which are based on the assumed displacement hybrid finite element method. Formulation of
the assumed displacement hybrid finite element method for finite deformation analysis is based on an
incremcntal procedure with equilibrium checks and
parallels that of an infinitesimal deformation analysis.
I.
-.,
A.S. Kobayashi
Univ. of Washington
Dept. of Mech. Engineering
Seattle, Washington 98195
The variational formulation of this assumed displacement hybrid finite element method for finite
deformations is based on s continuously updated Lagrangian description with incremcntal Green strain
tensor and symmetric Piola-Kirchoff stress tensor.
Consider two configurations of a body, CN
and C N + ~ .in a two-dimensional space a s shown in
Fig. 1 where CN is the reference state before the
addition of the Nth increment of load and C N + ~IS
Introduction
In recent years, several finite element methods
have been formulated from different variational
principles of solid mechanics by systematically relaxing the continuity requirements at the interelement boundaries of adjoining discrete elements1~2~
3. One such method is the hybrid displacement finite element method where the interelement displacement compatibility is satisfied only in the average
by introducing Lagrange multipliers and treating
the interelement compatibility conditions as constraints. To derive the stiffness properties of
each finite element in this model, one can assume
the following three functions:
(1) Completely arbitrary element interior disp 1acemen ts .
(2) Independent, inherently compatible element
boundary displacements.
( 3 ) A set of Lagrange multiplier terms which
are physically the interelement boundary
tractions.
Figure 1. Coordinate System
the deformed state after the addition of the Nth
load-increment. A fixed rectangular Cartesian bases 4
i: is emoloved to describe both Cu and C ..-A
M~,.
The position vector of a particle in Cs is denoted
by R and that of the same particle in Cx+l is denoted F~ r. R and fare expressed in the artesian
coordi;iate; wi,e,,'ethe incremental displacemen; vector is Au=r-~sbuiii, ~h~ incrcmcntal creen strain
=;fFrFed to the metric in cN is then given
.
The hybrid displacement finite element method is
suitable for analyzing problems involving strain 01
stress singuiaritics, such as the large strain in
the vicinity of an indentor tip in indentation problems or in the vicinity of a crack tip in dilctile
fracture problems. The effects of strain or Stress
singularities prominent in such problems can be
easily incorporated by assuming appropriate interior and boundary displacement 2nd traction fields.
A unified approach based on a piecewise linear analysis using a continuously updated Lagrangian
frame is employed in thc treatmcnt of geometric a5
sell as material nonlinearities. An additional
equilibrium check at the end of each incremental
loading and a Newton-Raphson iteration is used to
reduce the norm of the r e s i d u a l vector i f this
equilibrium error excccds a specified tolerance.
In the following some of the computational details
associated with this procedure will be presented.
-/
*
Member, A I M
279
I
hv
-,
1
.+AI,. .+bu Au
]=AE. .+As*.
. (la)
Ae. .= -[Au.
11
2 I..] 1.1
k,i k,j
11
11
where
1
As. .= -(Au.
11
2
.+Au. )
1.1
1.1
Ub)
and
As', .= d1 u
11
2
k,iAuk,j
(IC)
are the linear incremental strain tensor, and the
quadratic incremental strain tensor, respectively.
The incremental variational prjnciple for the
hybrid displaccmeat finite elemcnt model with an
equilibrium check f o r a l l m elements is
Eq. (lb) can be used for the above functional. The
variation of the above An with respect to t h e independent variables of Aui, Avi and TLi yields the
following Euler equations:
1
1 0
[ T ( E ~ ~ ~ ~ ) ~ A
7 EOijAuk,iAUk,j
~ ~ A ~ ~ ~ +
An= Z(1
Aa,, .+[ao Au. .] +AF.-O
11.i
kj 1.1 ,k 1
on Am
T Li=~o..n.+a'
I] J
kjAU.
I.] .nk
0"
aAm
(3b)
Au.=Av.
1
1
on aAm
(3c)
(3a)
Am
(2aj
Om
$ij,j+fi=O
and
(-c
E*=
0
. - AT.
11
.+F.O
1.1
1
AVi)dA+
Am
AvidS
m'
(2b)
...
is entire boundary of the mth element
aAm
in the Nth state
On
'om
(3d)
The relation between the total Stresses a 0i.+ACij
referred to the metric in CN and the true Eule&
S O . . , referred
the metric in cx+l is
is the portion of, , ,A where surface
tractions
are actually prescribed
in the Nth State
m
.
'
0 11.n.=T.'
1 1
Eq. (3d), which follows from the variation of E * ~ ,
implies that the initial Stresses in the Nth stage
are in equilibrium. Due to the matkmatical approximations involved in the incremental solution, however, the initial stress, o o . . , may not be in true
equilibrium and thus the term? E * ~ ,in Eq. (2a) pru
vides a check for the imbalance o f nodal initial
forces.
is the area of the mth element
(m=1,2 M) in the Nth state
Am
'a
Is Tio
and
11
bu (Ac..) are the increments of displacements
" (strains) from Nth to (N+l)th state
AVi
are any continuously differentiable
displacement field used to check the
equilibrium of the Nth referenced state
)
(Eijka
TLi
Avi
'
is the current elastic stiffness tensor or the plastic stress-strain tensor
under plastic yielding
ax IS
. the determinant of the matrix I.[, ax.1
where
ax,can J
Since x ~ = X ~ + and
A U ~xi,k=Aik+Aui,k, I=,
be approximated as f$-'=(1-Aul
l - h 2 , z ) , then
SOij becomes
are the incremental Lagrange multiplier boundary tractions
S01
. . = ( l d c j k ) o ..+(AE.~+AW. ) o +(Arik+Aw. )o.
1
I]
J
jk ik
ik jk
(4a)
where
a..=a0 ..+Ac..
are independently assumed increments
13
11
of element boundary displacements from
Nth to (N+l)th state
Q0
..
11
ATi
are the increments of surface tractions from Nth to (N+l)th state
TO.
-21
A.o..=
are the initial true ( E u l e r ) stress
tensor for the Nth state
13
(4b)
11
(Au.
.-bu.
1,l
I.'
.)
(4c)
A similar transformation holds for surface tractions referred to C
N+l '
ox.
~~~
are the initial surface tractions
P i= +jo+~~j)
(5)
1
4
AFi
are the increments of body forces from
Nth to (N+I)th State
P.1
are the initial body forces
'*m
is the correction term for satisfying
equilibrium condition a i the initial
stress state in the Nth state.
Since Aui, Avi and T L ~
are treated as independent
variables in Eq. (Za), these three independently
assumed functions can be written in matrix form as
Since the geometry of C N serves as the reference Lagrangian framc, from which the incremental displacements are measured, and the initial stress and the
incremental strains and stresses are referred to
the metric of this frame, the geometry of CN i s
continuously updated nt each increment of londing.
The linear form of incremental strain tensor of
280
lAu)=[UR]lB)
or
[uslial
(Av)=[L](Aq)
or
[Lsl{Aql
IT,,l=[R]
or
[RS]{a)
(a)
where
[U,]
represents a regular displacement function
[Us] represents a prescribrd singular bch:ivior
near an indenter or crack tip
[a]
is the coefficient of the singular function
of [Us]
161 are unknown coefficients
J
[L] are interpolation functions fdr boundary
displacements in terms of boundary nodal
values
[Ls] is the singular counterpart of [L]
(Aq) are the incremental nodal displacements
[Rl
can be simply chosen through appropriate
stress functions
Furthermore
[RS] is the singular counterpart of [R]
[a]
are the unknown coefficients.
Using he above Eq. ( 6 ) and through a lengthy derivationg, the final incremental algebraic equation
governing the incremental deformation of body C
N
becomes
[K] (AqI=(AQ)+(c*)
(7a)
;here [K] is the assembled tangent stiffness matrix
of the
(AQ) are assembled nodal forces in
the structure and IF*)
are nodal force equilibrium
Each of the above matrices is assembled
from theelement counterparts whicharediscussedbelow. The element stiffness matrix [k] is writtenas
[Hi]=[Ji]+[Gi]
i=l,Z,j
where for a nonlinear and elastic
tic analysis
OT
T T
L
'
/
.
f5,l-J [Dl [E ][DIU
Am
J
elastic-plas(Ila)
wherein each of the submatrices i s defined in the
following. The element load vector is (AQe]=(G).
The incremental total strain tensor, which incorporates the elastic as well as the plastic components and strain singularity, becomes
and for a large deformation analysis
Ac=[Dj[Bf +[DS](al
aAu
(&=[El
(8%)
T o
[Ek] [S IIBkldA
k=1J
(1W
Am
T o
[G~I=J IBkl 1s lIBs,ldA
k=1,2
(Ile)
[GI]=/
(6) +[BSl [a]
(8b)
where [D] or [SI and [D,] or [Bs] are appropriate
derivatives of [U,] and [Us], respectively, in Eq.
(6a).
The partitioned stiffness matrices in Eq. (7b)
can be expressed as
Am
T
o
[G31=l [Bskl [S IIBSkldA
km1,2
(Ilf)
m'
where [So] is the initial Stress matrix and [ET] is
the current constitutive property matrix as modified
by nonlinear elasticity OT elastic-plasticity.
The soiution of the global stiffness matrix equation Eq. 7a) yields the incremental nodal displacement [Aq] 1 of the entire structure and the residuals [E']
to check equilibriums at the incremental loading stage. Throughout the whole loading,
[AqlNG1 is used to update the geometry and to find
the stiffness matrix for (Nt1)th step with appropriate modifications in geometry and a given constitutive relation.
A*
I'
A t the'end of every loading step, the equilibrium of the nodal forces is checked. The degree
of equilibrium is judged by the values of a parameter, E",
defined as the ratio of the norms of
the residual vector and total vector:
281
I(=
for piane stress
The shape of the element chosen throughout this
study is a curvcd, isoparnmetric eight-node quadrilateral element' of various mesh size as shown in
Fig. 2 .
and u is the Poisson's ratio.
For,a plastic state, the singularity matrix was
chosen so that the plastic strain singularity f o r a
low hardening material would be close to l/r. The
singularity matrix which yields a plastic strain
singularity of r-O.9 is
Y
i
3e
cos-,
58
0,
0,2
sinp
e
0,
sin-,
38
2
(15f)
where the multiple valued strain intensity factors
are
tal=tal .a2 ,a3,a4,a5,a6)
(15d
The shape functions [L] for boundary displacement are derived from an assumed quadratic polynomial of
2.
Av=as +bs+c
(16a)
where s is the distance measured along curved e l e ment boundary.
Figure 2 . Eight-Node Isoparametric Element
,
The sides of the element boundary can be distorted to a quadratic shape. Such a quadratic isoparametric element formulation insures a better modeling of curved surfaces encountered in the vicinity
of a blunt indenter used in the contact problem or
a blunt crack tip. Moreover, the element is defined
as the square element in a non-dimensional isoparametric coordinates 5 and ri within -1 to r l .
The assumed field functions, ( A " ) ,
(AvI
For singular elements in elastic analysis of a
crack tip, the displacements along the boundaries
containing the crack tip are assumed as
Av.=a.r1/2+b.r+c.
1 1
I
1
(16b)
For singular elements in plastic analysis of a crack
tip, the boundaries containing the crack tip are
assumed as
and
Av.=a.r' 1+b.r+c.
[TL] are all constructed in this isoparametric
coordinate system of 5 and ri. The assumed interior
1
displacement field, (nu), is derived from incomplete
eight term cubic polynomials. The components AuX
and buy are assumed independently with two constraints to exclude rigid body motion and major 1-0tational motion of the element. The matrix form of
(Au) in the presence of strain singularity are
1
1
(16~)
1
The boundary traction field [TL],,which is mathematically a Lagrange multiplier, 1 s derived from
TLi=aijnj where n3- is the direction cosine of a
normal to the boundary and Oij is the self-equilibrated stress field generated from the stress function 4 in isoparametric coordinates as
+ =E 2al+n 2a2+<na3+c3a4+n3a5+c 2w
6
+<rizo +c4a
7
8
where
...
For an elastic state with a stress singularity of
b(I/G), the singularity matrix of
End ( a )
For traction free boundary condition, i.e. TL =O
along n=-1 boundary, the following stress function
i s used:
[Us] becomes
are the modes I and ' I 1 stress intensity
factors as
282
area integrals involving in essence various tensor
+t2(n+i)
4 a12+<3 ( i + n 3)al3
The (Au) field associated with the above stress
field can be taken a s :
AU =E5 +S(l+n)5 +52E3+S(~+n)2B4+S 2 (1+'I)B6
X
2
I
(18a)
2
3
2
+ L ( l + q ) 5,+5 (It'l) B8
For the residual vector [E'],
the shape function is
dcrivcd from the incomplete eight term cubic polynomials for each element as
inner products in the strain energy density function needed to be evaluated. A l l area integrals
involving rcgular terns were evaluated by a five
point Gaussian quadrature in thc standard format.
Such numerical integration cannot be done within
reasonable accuracy for singular intervals such as
[Hz]: [tl3], [SI], [Sz] and [Sj] of the previous
section.. For example, [ H z ] contains clastic r ^ '5
and plastic r-.9 singularities, [tljl contains e l a s tic r-1.0 and plastic 1-1.8 singularities, and a l l
[Si], (Sz] and (S,]
contain elastic r - . 5 and plastic r-.l singularities. Fortunately, simplc coordinate transformations and change of arguments eliminated these singularities and thus no new numerical singular quadrature were necessary in this particular analysis. For area integrals, the singularities a r e eliminated by coordinate transformation
from Cartesian to polar coordinates together with
the conversion of dxdy=rdrd8. For line integrals,
the change of arguments by r=t* and r=t1°r9 will
eliminate the r-.5 and r-.l singularities, respectively. After the elimination of singularities,
the integra1.s are approximated by Gaussian quadrature in the isoparametric coordinate system with
integration limits from -1 to t l , and a r e then
scaled to tF.e physical systems by using the coordinate transformation relation of the isoparametric
element. Five point Gaussian quadrature was used
in line integration and five point product Gaussian
was used in area integration.
V.
The developed assumed displacement hybrid finite
element model was used for nonlinear elastic finite
deformation study of a state of strain surrounding
a blunt indenter applied to a rhesus monkey brain
where much of the pathological evidence associated
with this indentation was confined to a 2.5mmx2.5nm
brain region surrounding the indenter. Same details
of the experimental protocol as well as physiological significance of the results are discussed elsewhere8. In the following a brief description of
the numerical procedure as well as some unpublished
results will be presented.
A two- and one-parameter self-equilibrated singular
stress field of the near field solution are incorporated into the above boundary stress field for
the analyses of elastic and elastic-plastic fracture mechanics. These stresses are:
-,
-
In order to achieve reasonable numerical accuracy
without excessive COnQuter time the substructuring
procedure was used where tk'c finite element models
were solved in succession. First, the entire rhesus monkey brain was modeled by a 40mmx60mm rectangle in plane strain condition where only one half
of the rectangle was analyzed, due to symmetry in
loading and geometry. AS shown in Fig. 3, only
1 5 elements were used in the coarse structure analysis and 48 elements w c ~ eused in the 6mmx8mm substructure analysis. The width of the element directly under the indenter is 0.1m which is equal
to the contact area between the indenter and the
brain surface. Material properties used in actual
calculations were shear modulus G=4.5x104dyme/cm2
and Poisson's ratio u=0.49. The source of these
data and justification for using linear elastic
and compressible material properties are discussed
in Ref. 8.
(19a)
for elastic analvsis of a crack tio and
Five increments of approximately 0.25mm and a
final increment of Imm indentation were used to
model a total indcntation of 2.26mn. The allowable
tolerance of e** was set to 0 . 0 2 . The first increment of loading which was a 0.25mm indentation required only one iteration. The results of the equilibrium check of E q . (7c) increased the indentation
for plastic analysis of a crack tip.
1V.
Ais
Numerical Integration
evident from Eqs. (10) and (11).
a
Indentation of the Monkey Brain
series of
283
APPLIED LOAO
13.6 p r l
r O E F O R M E 0 BRAlN SURFbCE
---____
NOEFORMED
BRAIN
I
SURFACEJ
were discussed in detail in Ref. 8.
The results o f the first incremental loading of
0.26mm indentation were compared with the classical
elasticity results of Boussinesq.
The finite
element results wcrc ZU-30". smaller than Boussinesq solution within a 6mm depth under the indenter. This difference decreased to less than 10%
at a depth of 1Omm.
APPLIED LOAO
$=I3 6"pw
I
Figure 3 . Finite Element Breakdown of an Idealized
Rhesus Monkey Brain Subjected to Applied
Indentation
to 0.26mm and the corresponding indenter load to
1.27gwt. The second, third, fourth and fifth increments of loading for prescribed indentation of
0.50mm. 0.75mm, 0.95mm and l.lOmm required 2, 4 , 6
and 7 iterations, respectively, before E * * became
smaller than 0.02. The equilibrium check and associated iteration procedures for each incremental
indentation increased the indentations to O.Slmm,
0.76mm, 0.96mm and 1.llmm respectively with corresponding indentation loads of 2 . 5 6 gwt, 3.89 gwt,
4 . 9 5 gwt and 5.79 gwt. respectively.
A larger incremental indentation of l.OOmm was
taken for the sixth and final increment in order to
reduce the computation time involved. As a result
E** was still of the order of 0.10 after 9 iterations, with a very slow convergence rate which would
require an estimated 16 iterations to reach the error allowance of ~'*=0.02. Since the variations in
the nodal displacements and nodal forces after 7
iterations were confined to the finite element immediately under the indentation, the computation was
terminated. The detailed stra,indistribution in
this element was then estimated from the distributions obtained in previous load increments with due
consideration of the large local deformation immediately below the indenter.
The incremental loading for the coarse element
breakdom was the prescribed displacements at the
three nodal points on the surface boundary of the
element directly underneath the indenter. These
displaceme.its modeled the contact surface of the
circular indentcr tip. Only two states of indentations, 0.SoMn and l.lOmm, were reanalyzed by the
use of the substructing procedure. These results
Figure 4 . Contours of Maximum Principal Strain at
Indentation of 2.27mm
The deformed'free surface of the brain under the
maximum indentation of 2.27mm was shown in Fig. 3.
Pig. 4 shows the distribution of maximum principal
strain for the maximum indentation of 2.27mm, where
the obvious region of maximum strain is immediately
under the indenter. In this coarse element breakdown, numerical accuracy within the immediate vicinity of the indenter was not adequate to warrant
plotting the strain values l a r g e r than 0.2. Hawever, these strain contours followed a characteristic inverted bell shape which was of primary physiological significance in this biomechanic problem.
For the first Incremental loading, this inverted
bell-shape strain contour did not appear in the substructure, thus suggesting that finite strain analysis, as used in this study, was necessary to obtain the characteristic inverted bell-shape strain
contours.
Fig. 5 shows the distributions of shear strain,
cXy, for the maximum indentation of 2.27mm. This
shear strain could be the cause of shearing horizontal arterioles emanating from the vertical
arteries with resultant hemorrhage close to the
APPLIED LOAD
'
lpy'
A
I " "
* 13.6
1
Figure 6. Model of Three-Point Bend Specimen
(shown in insert) and Paths of J integral
Figure 5 . Contours of Shear Strain at Indentation
of 2 . 2 7 m
indenter. Although the brains were perfused prior
to fixing in the actual experiments, regions of residual hemorrhage suggest that some arterioles in
the high cXY regions did shear, thus providing some
verification of this hypothesis.
The computation procedure demonstrates that a
number of iterative cycles for equilibrium correction is required at each loading step. Our experiences are in accordance with those of Hafmcister
who found that the equilibrium check and correction
is indispensable for obtaining the meaningful computational results in an incremental analysis of
nonl incar prob 1ems4.
j
Fig. 6 also shows the finite element breakdown
of the plate which was chosen to closely follow the
predicted patterns of plastic yiclding. A total
of 63 elements and 222 nodes are used in this aaalysis. Of these 63 elements, only 2 elements, h,hich
share the crack tip, are singular elements. ;he
singular elements are both square elements Kith
sides of O.la xhich was found co bc the optimal size
in elastic analysis of a central notched specinen
using hybrid displacement finire element madcl5'.
These singular elements arc the sm311 st elerncrts
eyement area 112
with a radius r=0.028 in., where r = (
1
whereas r for the largest elements is 0.139 in.
Elements far away from the crack tip are chosen to
be identical in size so that the repetitive computation o f the stiffness matrix is avoided. The
uniaxial stress-strain curve of the material is
assumed to be:
~
VI. Three Point Bend Specimen
.
m
An edge-cracked plate in plane strain condition
under three point bending load, which is the subjcct of a round robin analysis by the ASlW Task
Group on Elastic-Plastic Fracture Criteria, was
then ann1y:ed by the developed procedure. This
analysis was confincd to infinitesimal defornation
tluc to lack of available computer funds at the time
of this investigation. The specimen analyzed is
shown in the insert of Fig. 6. Since the geometry
and loading is symmetric about thc crack line, only
one-half of the plate is analyrcd. The crack
length, a, is half the plate width of W-1 inch and
a span of 2H'J in. Variables U and V describe the
displacements a10~1gx and y coordinates, rcspcctivelY, e.g. V s is the crack mouth opening, and UA is
the loading point displacement.
285
a
a < a
E = -
E
where
a
= 30x103 psi
Y
Bo =
E
n
-
5
3 psi
6
51.SSxlO psi
144x10
10, v = 0.3
Y
The material constant Bo used in this analysis is
20% higher than the B0=12Ox1O3 psi specified by the
ASP4 Task Group. Von Mises yield criterion with
isotropic strain hardening and incremcntal flow
rule was uscd in this analysis.
The first stage of loading under the increasing
load was the elastic state whcrc only the elastic
singular elements were used. The elastic-plastic
state followed this first state and the plastically
yielded singular elements were used. The onset of
the element yielding was judgcd by thc equivalent
stress generated from the strain at the element
midpoint. The elastic stress-strain matrix rclation [Ee] was used to calculate element stiffness
for those elements which wcre not yielded and the
plastic stress-Strain matrix [Ep] is used for those
yielded elements.
Actual incremental load at each loading stage is
determined by using Yamada et al. '5 methodio which
uses the small and varying increments of load barely sufficient to initiate yield in the adjacent
element. The advantage of this method is that it
enables one to trace the sequcntial yielding of the
elements in correct order. At each incremental
loading, an arbitrary test-incremental load [AL]
and the ratio R is calculated. The ra;;oagp. Ilied,
S the scaling factor where [FAL] is the
loading increment sufficient to barely initiate
yield in each elastic element. The actual incremen.
tal load at each loading is then [KminAL], where
%in is the minimum of R of all elastic elements.
The value of is derived from the no! Mises
yield function. The explicit form of R is shown
to be
The t variable was thcn transformed to z variable
and five-point Gaussian quadrature was applied on
z to complete singular line integration. The transformation between t and z are:
for'elastic and plastic case. respectively.
One of the quantities required in the ASTM round
robin analysis is the evaluation of J-integral.
J-integral for small deformation is defined .SI1,
J'=
I
r
au.
[Wdy-Ti & d s ]
where W is the stress working density function at a
point on the contour r defined by
and T. and ui are the traction field and displacement +ield, respectively. Contour r w?.s chosen to
be parallel to x and y coordinates as shown in Fig.
6 to simplify the mathematical manipulations of W
and Ti computations. The integration points were
prescribed at equi-distance along i'. The continuously varying incremental stress and strain fields
at each integration point was then computed and
added to the corresponding total values of previous
loading stage.
A considerable amount of computing time, usually
on the order of 300 sec. of central processing m i t
(CPU) on a CDC 6400 computer, was used for each increment to obtain the results. Some selected results which are characteristic of the solution will
be shown and discussed in the following.
where oef is the present equivalent stress of the
elastic element and ASt denotes the increment of
aef induced by the load-increment (ALI. Aoeft is
defined by
and
5
= (Azeft)2-26Ao -(Aot)
2
(21c)
Since the process is assumed to be linear for
each load increment, all field variables generated
from [AQ] are multiplied by a scaling factor to
yield the actual incremental field variables. In
this analysis, a 500 Ib. test incremental load is
supplied throughout the process. The computed ii
ranged from 0.2 to 0 . 7 .
The global Cartesian coordinate (x,y) and isoparametric element coordinate ( 6 , n ) arc transformed
to polar coordinate ( r . 0 ) at the crack. tip. The
I-* singularity is eliminated by making use of
dxdy=rdrde. The integration is first carried ?long
the r coordinate with a simple transformation o f
t=fl(e)r+cl and v=f~(fJ)r+c2. Then a numerical integration of five-point Gaussian quadrature is
applied on the 9 coordinntc to complete the double
integration. As mentioned previously, a change o f
arguments of r=t2 and r=t10/9 reduced out the r . 5
elastic singularity and r-.Q plastic singularity,
respectively, with the singular line integrals.
Figure 7. Load Point Displacement (UA) and Crack
Mouth Openiy (VB) at Various Load Levels
The first element yielded is obviously the crack
tip element at load P=1.88x103 lbs and at load
point displacement U~=3.2x10-3in. The initial
tangent of load-dcflection curve is P/U~=5.878~10'
Ib/in. as shown in F i g . 7. This value agrees with
Bucci et al. Is results of P/UA=5.853x105 lb/in derived from an empirical formulal2. The corresponding stre33 intensity factor, KI, was 19.5~10
psi&
at P-1.88xlO 3 Ibs. K I was also coTputcd
from COD and b formulas of Bucci et al.’* and of
Srawlcy et a 1 . i 3 , These four KI values were within
3% of each other.
J
3
The J-integral at P-1.88~10
lbs. Gas cvaluatcd
on four different paths for elastic response as
shown in Fig. 6. The mean radius of the paths
based upon the area enclosed by the paths are ,020.
.081, .14S and ,295 inches which in turn are labcled as Path I , Path 11, Path 111 and Path IV, respectively. The computed values of J were within
1.6% of the average value; thus, path dependence
of the J-integral was well-maintained. The mean
value of J, defined as 7, is 11.71 lb/in. It is
noted that the J value evaluated from Path I which
was completely within the two singular elements
also yielded exccllcnt rcsults. This good corrclation of Ki and J values with known solutions and
the path independence of the J-integral verify the
accuracy of the finite element procedures in the
elastic region.
Fig. 8 shows the relationship between crack opcning displacement, 6 , and crack mouth opening, Vg.
6 was first computed from the crack profiles by
means of linear extrapolation. A linear relarionship between 6 and VB exists when plastic behavior
predominated after VB reached 0.0034 inch which
corresponds to net section yielding. An experimental formula proposcd by CODA (COD Application Panel
of the Savy Departmcnt Advisory Committee on Structural ‘Steel) in England14
= .33(w-a)
.33w+.67a
B
is also shown in the same figure for reference
The CODA formula gave a higher value of 5 than
that of linear extrapolation. However, the two
curves are consistent and the linear relationship
between 6 and VB is also seen in the CODA representation after VB reached 0.0034 in.
The deflection at load point UA is plotted in
Fig. 7 as a function of applied load P. This overall load-deflection curve beeins-to deviate noticeably from linearity at P-6.04~10-’lbs. This point
corresponds to the smallest load at which net section yielding occurred. A plastic hinge was formed
at this load and subsequently U.4 increased ra idly.
The formation of a plastic hinge at P=6.O4xiO9 I b .
was also evident in another load-deflection curve
of P vs Vg illustrated in the same Fig. 7, where
VB i s the mouth opening displacement. After hinge
formation, Vg showed a rapid increase.
i
d
u,
(lO-?nl
Figure 9. J Integrals at Various Paths
20
40
As mentioned previously, the stress working density term of the J-integral comprises both elastic
and plastic strain energy. Four rectangular integration paths, as shown in Fig. 6, were used. The
smallest path, Path I, is totally embedded within
the crack tip sinplar elements. The loss of a
magnetic tape forccd the computation of Path I J integral to terminate at load level P=4.89x103 Ib.
while J-integrals for the other three paths have
been evaluated for each increment loading up to the
final load levelof P=8.O6x1O3 lb. Fig. 9 shows the
four J-integrals for different paths. The standard
60
ve w3,d
Figure 8 . Relationship Between COD and Crack Mouth
Opening
-i
287
deviation of J for four paths is less than +So, of
the average vnluc of J, denoted 3 s 7,for tKe whole
loading process. Thus, thc path indcpcndent property of J from the computed solution appeared to
be maintained even after net section yielding had
been rcnchcd. It is :ilso noted that the J-intcgral
evaluatcd entirely from the singular stress and
strain fields yielded the values consistent with
other J values evaluated from the paths away from
a crack tip.
analysis using the flow theory of plasticity, the
computed J-integral hns maintnincd its path independence within a small perccntsge error even after
the gross yielding. Therefore, the J-integral
evaluated by using total strain computation seems
to be an adequate fracturc rrc3ictind p:tran-cter
without m y modification. This arpment is a l s o
supported by Rice's suggestion that the loading
near the crack tip shows the condition of the radial loading. Under such loading, the flaw theory
o f plasticity reduces to the deformation theory of
plasticity, and for monotonic loading it becomes a
nonlinear elasticity problem.
This figure also shows that a linear variation
of J with the load point d i s lacement U,, when Uh
exceeds approximately 10x10-9 in., and prior to
such load J is proportional to the square of UA.
Rice's''
simple estimation of the J-integral
from the l o a d point work has been substantiated
from the computed results of the present study.
The experimental measurement of the load point
displacement, U.4, associated with the onset of
crack, can be used to determine the critical Jic.
Therefore, the experimental J I c test procedure is
considerably simplified compared to the present
existing praccdure by Begley et a1.16 which must
test several virgin specimens with different crack
sizes to obtain JlC.
9
8
7
As for the mathematical evaluation of J in real
engineering situatims, the path independence o f J
allows the J to be evaluated away from the crack
tip which is the singular point of continuum mechanics; Since it is difficult to achieve ccnputational accuracy in the crack tip region, field
values away from the crack tip can be used more reliably to evaluate J-values for practical cracked
structures under various loadings and geometries.
Further up-to-date discussion an this subject can
be found in,Refs. 17 and 18.
6
2
.-
-
5
3
t 4
COD as a ductile fracture criterion is popular
in the United Kingdom and Japan. The less attractive side of this criterion is that 5 has not been
rigorously defined and the experimental measurement
of 6 is not an easy task. In this analysis with a
nearly linear COD profile away from the crack tip,
the 6 can be easily and clearly obtained by its
definition as the linear extrapolation of the crack
profile. The 6 so obtained correlates well Kith
CODA experimental formula. The cstablishnent of
the relationship between 6 and more easily experimentally measurable physical parameters such as
mouth opening proposed in the CODA fonula should
make COD criterion more attractive. Fig. 11 shows
the comparisons of different linear relationships
between 6 and J in the range of large scale yielding. The 6 obtained as a linear extrapolation in
this analysis can be correlated with 7 as in the
large scale yielding range.
3
2
I
r (in.)
Figure 10. Various Strengths of r-n Type Singularity
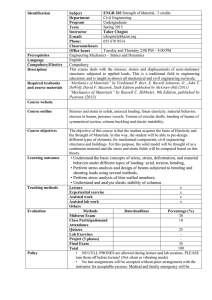
Fig. 10 shows different r-n types of singularity. Comparisons between r-1 type and r r . 9 type
show deviations of 41", 37% and 26% at r=0.005 in.,
0.01 in. and 0.05 in., respectively. To better model the r-l type singularity. both fl and the size
of the singular element should increase. The average deviations between r.91 tvpe and r-.90 type
and betwen r.09 type and r-.l type are less than
3.5% in the range of r=.005 to .OS in. The ap roxi
mation of r-.9 for r-"/n+l and r-.l for r-l/n+y is
thus substantiated.
6=.375
J- =
a
Y
7
2.6670
(25)
Y
For different materials, Hayes' correlation formula
is J/2oY. The general linear correlation formula
J
of the type
seems to be substantiated. From
P Y
Fig. 11, it is noted that Wells' small scale yielding formula19 differs greatly from the large s c a l e
yielding formula. Wells*O also proposed an altcmative 6 definition by suggesting 6 be taken as the
displacement at the elastic-plastic interface on the
crack profile. To evaluate this proposition, themore
In this monotonic loading three point bending
288
detailed yielding yroccss has to be undertaken.
Journal of Solids and Structures, Vol. 4 , 1968,
pp. 31-42.
L
8.
7.0
S.N. Atluri, A.S. Kobayashi and J.S. Cheng,
"Brain-Tissuc Fragility - A Finite Strain Analvsis bv a Hvbrid Finite Element Method." J. of
Applicd'Mechkics, Trans. of ASME, Scries E,
Val. 97, June 1975, pp. 269-273.
M. Nakagaki,
"Fracture Mechanics Application of an Assumed
Displacement Hybrid Displaccment Procedure,"
A I A A J o u r n a l . Vol. 13, No. 6 , June 1975. pp.
734-739.
9 . 'S.N. Atluri, A.S. Kobayashi and
10. Y . Yamada, N. Yoshimura and N. Sakurai, "Plastic Stress-Strain Matrix and Its Application
for the Solution of Elastic-Plastic Problems
by the Finite Element Method," Int. J. Mech.
Sci., Vol. 10, 1968, pp. 343-354.
-
11. J.R. Rice, "A Path Independent integral and
the Approximate Analysis of Strain Concentration by Notches and Cracks," J . of Appi. blech.,
Trans. of ASME, Vol. 35, Series E, No. 2, June
1968, pp. 379-386.
oLlNEIR EXTRAPOLATION
a CODA FORMULA
T
-(in
a"
12.
Il0-I
Rice. "J-Intemal Estimation Procedures,"
Fracture Tougi;ness, A S M STP 514, Sept. 1972,
pp. 40-69.
Figure 11. Comparisons of Various COD
~
Acknowledgement
13. B. Gross and J.E. Srauley, "Stress Intensity
Factors for Three Point Bend Specimens by
Boundary Collocation," NASA TN 0-3092, 1965.
The results reported in this paper have been
supported by funds from several sources. In particular. the authors wish to acknowledge'suppart
from NSF Grant GK 37287 and AFOSR-73-2478.
14. D.J. Hayes and C.E. Turner, "An Application of
Finite Element Techniaues to Post-Yield Analvsis of Proposed Standard Three-Point BeEd
Fracture Test Pieces," lnt. J. of Fracture,
Vol. 10, No. 1, March 1974, pp. 17-32.
References
1.
T. H.H. Pian and P. .Tong, "Variational Formulation of Finite-Displacement Analysis,"
Qeed Computing of Elastic Structures, edited
by 8. Fraeijs de Veubeke, Universite de Liege,
Belgium, 1971, pp. 43-64.
2.
3.
15. J.R. Rice, P.C. Paris and J.G. blerkle, "Some
Further Results of J-Inteeral Analvsis and
Estimates," Progress in Flaw Growth and Fracture Toughness Testing, ASTM STP 536, 1973,
pp. 231-245.
I
P. Tong, "New Displacement Hybrid Finite Element
Models-for Solid bntinua," int. J. for Numerical Methods in Engineering,
pp. 43-64.
S.N. Atluri, A.S. Kobayashi and M. Nakagaki,
"An Assumed Displacement Hybrid Finite Clement
Model for Linear Fracture Mechanics,"
Of Fracture, Vol. 11, NO. 2, April 1975,
pp. 257-271.
16. J.A. Begley and J.D. Landis, "The J-Integral
as a Failure Criteria," Fracture Toughness,
ASTM STP 514, Sept. 1972, pp. 1 - 2 5 ,
17. S.N. Atluri and M. Nakagaki, "J-Integral
Estimates for Strain Hardening Materials in
-
4.
R.J. Bucci, P.C. Paris, J . D . Landis and J . R .
L . H . Hofmeister, G.A. Greenbaum and D.A. Evcr-
son. "Larpc Strain Elastic-Plastic Finite Ele-
tice-liall Inc.. 1965.
18. S.N. Atluri, M. Nakagaki and W.H. Chen, "Fracture Analysis Under Large Scale Plastic Yielding: A Finite-Deformation, Embedded Singularity
Elasto-Plastic Incremental Finite Element Solution," t o be published in ASTM STP, 1977.
6.
J.S. Cheng. "Assumed Displacement Hybrid Finite
Element Method for a Finite Strain Analysis and
Elastic-Plastic Fracture," a PhD thcsis submitted to the University of Washington, 1976.
19. A.A. Wells, "Application of Fracture Mechanics
at and Beyond General Yielding," British
Welding. Rcsenrch Report, Nov. 1963, pp. 563570.
7.
I. Ergatordis, B.M. Irons and O.C. Zienkiewicz.
"Curved Isoprametric, Quadrilateral Elemcnt
for Finite Element Analysis," International
20.
ment Ana1;sis."
A I M Journal,
Vol. 9, NO. 7 , July 1971, pp. 1248-1254.
5.
Y.C. Fung, Foundation of Solid Mechanics, Pncn-
289
A.A. Wells and F.M. Burdekin, "On the Sharpness o f Cracks Comoared with Wells' Crack."
Int. J. of Fracture Mechanics, Vol. 7 , 1971,
pp. 233-241.