E A Semiblind Two-Way Training Method for Discriminatory Channel Estimation in MIMO Systems
advertisement
2400
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 62, NO. 7, JULY 2014
A Semiblind Two-Way Training Method for
Discriminatory Channel Estimation
in MIMO Systems
Junjie Yang, Shengli Xie, Senior Member, IEEE, Xiangyun Zhou, Member, IEEE,
Rong Yu, Member, IEEE, and Yan Zhang, Senior Member, IEEE
Abstract—Discriminatory channel estimation (DCE) is a recently developed strategy to enlarge the performance difference
between a legitimate receiver (LR) and an unauthorized receiver
(UR) in a multiple-input multiple-output (MIMO) wireless system.
Specifically, it makes use of properly designed training signals
to degrade channel estimation at the UR, which in turn limits
the UR’s eavesdropping capability during data transmission. In
this paper, we propose a new two-way training scheme for DCE
through exploiting a whitening-rotation (WR) based semiblind
method. To characterize the performance of DCE, a closed-form
expression of the normalized mean squared error (NMSE) of the
channel estimation is derived for both the LR and the UR. Furthermore, the developed analytical results on NMSE are utilized to
perform optimal power allocation between the training signal and
artificial noise (AN). The advantages of our proposed DCE scheme
are twofold: 1) Compared with the existing DCE scheme based
on the linear minimum mean square error (LMMSE) channel
estimator, the proposed scheme adopts a semiblind approach and
achieves better DCE performance; and 2) the proposed scheme is
robust against active eavesdropping with the pilot contamination
attack, whereas the existing scheme fails under such an attack.
Index Terms—Two-way training, discriminatory channel estimation (DCE), semiblind approach, pilot contamination attack.
Manuscript received January 6, 2014; revised March 26, 2014; accepted
May 10, 2014. Date of publication May 22, 2014; date of current version
July 18, 2014. The work was supported in part by the NSFC under Grant
nos. 61322306, 61333013, U1201253, 61273192, 61370159, U1035001,
6120311761370159, U1035001 and 61203117, Guangdong Province Natural
Science Foundation under Grant S2011030002886 (team project), the Department of Science and Technology of Guangdong Province, China under Grants
2011A090100039 and 2011B090400360, the Program for New Century Excellent Talents in University under Grant NCET-11-0911 and Special Scientific
Funds approved in 2011 for the Recruited Talents by Guangdong Provincial
universities, and the Science and Technology Program of Guangzhou, China
under Grant 2014J2200097. The work of X. Zhou was supported by the
Australian Research Council’s Discovery Projects funding scheme under Grant
DP140101133. The associate editor coordinating the review of this paper and
approving it for publication was H. Li. (Corresponding author: Shengli Xie.)
J. Yang, S. Xie, and R. Yu are with the School of Automation,
Guangdong University of Technology, Guangzhou 510006, China (e-mail:
yangjunjie1985@gmail.com; shlxie@gdut.edu.cn; yurong@gdut.edu.cn).
X. Zhou is with the Research School of Engineering, The Australian National University, Canberra, ACT 0200, Australia (e-mail: xiangyun.zhou@
anu.edu.au).
Y. Zhang is with the Simula Research Laboratory, 1364 Fornebu, Norway
and also with the Department of Informatics, University of Oslo, 0373 Oslo,
Norway (e-mail: yanzhang@simula.no).
Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TCOMM.2014.2326394
I. I NTRODUCTION
E
AVESDROPPING by unauthorized receivers has become
a prevalent security threat in wireless communications due
to the broadcast nature of the wireless medium. Therefore,
discriminating the signal reception performance between a
legitimate receiver (LR) and an unauthorized receiver (UR)
becomes an important issue in secure communications [1],
[2]. To address the issue, the concept of physical layer security [3], [4] has been introduced which utilizes the physical
layer properties of a wireless channel to achieve the desired
discriminatory channel performance. From an informationtheoretic perspective, the studies in [5]–[7] showed that the
maximal data rate can be achieved by exploiting the difference
in the channel conditions between the LR and the UR, while
preventing the UR from eavesdropping any information from
the received signals. Moreover, [8] investigated the secrecy
improvement resulting from frequency selectivity in MIMOOFDM systems. From a signal processing perspective, various beamforming schemes [9], [10] have been developed to
enhance the signal reception at the LR whilst limiting the
quality of signal at the UR. The beamforming design requires
the channel state information (CSI) of the LR and/or the UR
a priori. Besides, the technique of physical layer security can be
used in many application scenarios, e.g., the two-way relaying
[11]–[13].
Several studies on physical layer security mainly focus on
data transmission without the assumption of perfect CSI. The
pilot transmission phase is the period to acquire CSI. It is
known that channel estimation performance has a significant
effect on data detection. This observation has motivated the
development of a new training strategy called discriminatory
channel estimation (DCE) such that the channel estimation
at the UR is much worse than the channel estimation at the
LR. For this, artificial noise (AN) [14]–[16] is inserted in the
training signals to jam the UR while keeping a minimal level
of interference to the LR. Chang et al. [17] first designed
a DCE scheme by employing multiple feedback-and-training
processes. This scheme requires large training overhead and
high design complexity. Later, a two-way training based DCE
scheme was proposed in the study [18] to reduce overhead
and hence improve the efficiency of DCE over the original
scheme in [17]. The two-way DCE scheme in [18] works well
against passive eavesdropping attack from the UR. However, as
we will show in this paper, the two-way DCE scheme is not
0090-6778 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
YANG et al.: SEMIBLIND TWO-WAY TRAINING METHOD FOR DCE IN MIMO SYSTEMS
2401
TABLE I
N OTATION L IST IN T HIS PAPER
able to achieve the desired performance under an active eavesdropping named the pilot contamination attack [19]. The pilot
contamination attack makes use of the fixed and publicly known
training signal used by the LR in the reverse training phase
in order to influence the channel estimation at the transmitter
(TX). Therefore, it is important to design a robust DCE scheme
against the pilot contamination attack, which does not require
any fixed and known training symbols at the LR.
In this paper, we propose a new two-way training scheme via
whitening-rotation (WR) based semiblind approach [20]–[22].
The proposed scheme includes two phases: 1) the LR transmits
a sequence of stochastic signals in the reverse training phase.
These symbols are only known by the LR itself, facilitating CSI
acquisition at the TX; 2) the TX broadcasts a new sequence
of signals inserted by AN in the forward training phase. This
will enable the channel estimation at the LR while disrupting
the channel estimation at the UR. With respect to the proposed
scheme, we have the following contributions.
• The proposed WR-based DCE scheme achieves a better
DCE performance than the existing LMMSE-based DCE
scheme in [18]. By combining the blind and trainingbased algorithms, the WR-based semiblind approach can
potentially enhance the quality of DCE. As shown in our
numerical results, the proposed scheme outperforms the
existing scheme with the same training overhead.
• Another advantage of the proposed DCE scheme is the
provision of a way to protect against the pilot contamination attack due to the randomness feature in the training
signal used by the LR. We present an analytical model to
demonstrate the effective attack protection and show that
such attack has a minor impact on the DCE performance.
• Moreover, we analytically evaluate the DCE performance
of the proposed scheme by deriving the NMSE of channel
estimation at both the LR and the UR. The optimal power
allocation between the training signal and the AN is also
investigated and an efficient solution is obtained as an onedimensional line search.
The remainder of this paper is organized as follows. First,
the system model and problem description are presented in
Section II. The proposed two-way training scheme using the
WR-based channel estimator is presented in Section III. The
performance analysis under the pilot contamination attack is
discussed in Section IV. Next, simulation results are given in
Section V, followed by the conclusions in Section VI. Through
the paper, we adopt the notations in Table I.
Fig. 1. Wireless MIMO system includes a multi-antennas transmitter (TX),
a multi-antennas legitimate receiver (LR) and a multi-antennas unauthorized
receiver (UR).
II. S YSTEM M ODEL AND P ROBLEM DESCRIPTION
A. System Model
As shown in Fig. 1, we consider a wireless MIMO system
consisting of a transmitter (TX), a legitimate receiver (LR)
and an unauthorized receiver (UR). In the system, the TX, the
LR and the UR have NT , NL , and NU antennas (NT > NL ),
respectively. The TX is connected to one LR and one UR
by means of two different communication channels, namely
legitimate channel and wiretap channel. The legitimate channel
and the wiretap channel are denoted as H ∈ CNL ×NT , G ∈
CNU ×NT , respectively. Besides, the channel from the LR to the
UR is denoted as B ∈ CNU ×NL .
To enable the LR to interpret the legitimate channel, the TX
needs to emit a sequence of training signals, but this also allows
the UR to perform wiretap channel estimation. Therefore, the
design of training signal is required to ensure a high quality
channel estimation at the LR but also prevent the UR from
estimating the wiretap channel.
The system model is based on the following assumptions.
1) Channels are assumed to be independently distributed
and have reciprocity, e.g., matrix H represents downlink
legitimate channel and HT is uplink legitimate channel.
Besides, matrices H, G, and B are assumed to be the
Rayleigh flat fading channels.
2) The entries of channel matrices H, G, and B are assumed
2
2
2
), CN (0, σG
) and CN (0, σB
), reto be i.i.d, CN (0, σH
spectively; moreover, the entries of receiver noises are
assumed to be the same as independent additive white
Gaussian distributed, i.i.d, C(0, σ02 ).
The reciprocal assumption indicates that the uplink and
downlink channel paths are similar, which happens in timedivision duplex (TDD) systems [23]. Such assumption is very
critical for the two-way training, and this paper mainly focuses
on the design of a DCE scheme in a TDD systems; besides,
the Rayleigh flat fading channel indicates that the channels
are relatively fixed over the transmission of symbols in one
time slot but change randomly between time slots. For the
second assumption of the system, it refers that the conditions
of channels and noises are respectively treated as same for the
sake of fair performance.
2402
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 62, NO. 7, JULY 2014
In this paper, two eavesdropping scenarios are taken into account, that is, passive eavesdropping and active eavesdropping,
i.e., pilot contamination attack [19]. For the first case, the UR
only silently receives signals via channels G and B during the
training phase; for the latter case, the UR not only receives signal but also emits false training signal from the uplink channel
GT within the training process. Such pilot contamination attack
is a potential threat for the two-way training.
The UR also makes use of the received signal for its channel
estimation in the same manner as (7), but the channel performance at the UR would be restricted due to the AN.
B. The Existing Two-Way Training Scheme
We first give a brief introduction of the WR-based semiblind
channel approach [20]–[22]. The channel matrix HT is firstly
estimated in the reverse training phase, thus we take the decomposition of channel HT as an example by
The two-way training includes a reverse training phase and a
forward training phase. For the reverse training phase, the LR
sends a reverse training signal to the TX as
P0
T 0 C0 ,
(1)
S0 =
NL
where P0 is the power of the training signal, and the reverse
pilot matrix C0 ∈ CNL ×T1 satisfies an orthogonal condition
C0 CH
0 = INL . The received signal at the TX is given by
X0 = HT S0 + E0 ,
(2)
where E0 ∈ CNT ×T0 refers to the AWGN matrix. By employing the linear minimum mean-square error (LMMSE) method
[24], the channel estimation at the TX is given by
2
−1
2
2
σH S0 SH
S 0 XH
(3)
Ĥ0 = σH
0 + σ 0 IN L
0 .
In the forward training phase, the TX transmits a sequence of
training signals inserted with AN to enable channel estimation
at the LR while degrading the channel acquisition at the UR. In
particular, the AN-aided training sequence, denoted by S1 , has
the following expression
P1
Δ
S1 =
T1 C1 + NĤ0 A,
(4)
NT
where P1 refers to the power of the forward training signal, T1 is the training length, C1 ∈ CNT ×T1 represents the
forward pilot matrix which satisfies an orthogonal condition
C1 C H
1 = INT . Herein, NĤ0 is a matrix whose column vectors
form an orthogonal basis for the left null space of Ĥ0 , that
NĤ0 = INT −NL . In addition, A ∈
is, Ĥ0 NĤ0 = 0 and NH
Ĥ
0
C(NT −NL )×T1 is the AN matrix with each component being
i.i.d. CN (0, σa2 ).
The received signals at the LR and the UR are respectively
given by
X1 = HS1 + E1 ,
(5)
Y1 = GS1 + F1 ,
(6)
where E1 ∈ CNL ×T1 and F1 ∈ CNU ×T1 are the AWGN matrices. By using the LMMSE, the channel estimation at the LR
can be expressed as
T
−1
2
2
2
σH
S1 SH
S 1 XH
.
(7)
Ĥ1 = σH
1 + σ 0 IN T
1
III. P ROPOSED DCE S CHEME U NDER
PASSIVE E AVESDROPPING
A. Preliminary of Whitening-Rotation Based
Channel Estimator
HT = WQH ,
(8)
where W ∈ CNT ×NL is a whitening matrix and Q ∈ CNL ×NL
is an unitary rotation matrix, i.e., QH Q = QQH = INL . Besides, performing singular value decomposition (SVD) [25] on
the channel HT gives
H
HT = UHT ΣHT VH
T,
(9)
where diag(ΣH ) = [ξ1 , . . . , ξNL ]T . One possible choice of W
and Q can be UHT ΣHT and VHT , respectively. Without loss
of generality, the channel estimation can be divided into two
steps with the WR-based semiblind method.
1) Estimate the whitening matrix W in a blind fashion using
the autocorrelation matrix of the received signals along
with a subspace based method.
2) Estimate the unitary rotation matrix Q using the training
signal with the constrained maximum likelihood (ML)based method.
The two-steps of the WR-based channel estimator provide
a new training design for improving the DCE performance.
Specifically, the WR-based semiblind method can be used for
the channel estimation both at the LR and the UR within the
two-way training.
B. Our Proposed WR-Based DCE Scheme
1) Step I. Reverse Training Phase: The LR sends the reverse
training signals to the TX for the uplink channel estimation
without benefiting the performance of channel estimation at
the UR. In the proposed scheme, the design of reverse training
signal has the same expression of (1). Different from the existing two-way training, the reverse training signal is randomly
generated at the LR and only known by itself, therefore, the TX
can not apply the LMMSE method for the channel estimation.
Alternatively, the TX can resort to the WR-based semiblind
method for the acquisition of channel HT . Specifically, we
estimate the whitening matrix of HT by performing SVD on
the autocorrelation matrix of the received signal, which has the
following form
Δ
RX0 =
X0 XH
0
.
P0
T
NL 0
(10)
YANG et al.: SEMIBLIND TWO-WAY TRAINING METHOD FOR DCE IN MIMO SYSTEMS
Referring (10), we can estimate the whitening matrix of
HT as
1
1
2
Ŵ0 = √ UX0 ΣX
0
P0
(11)
E0 EH
0
.
T0
Considering the noise interference, the error of the estimate
Ŵ0 can be defined as
Δ
ΔW0 = Ŵ0 − W.
(14)
By using the results of (8) and (13), ΔW0 can be deduced as
ΔW0 =
NL
ΔRH
S0 ,E0 Q.
P0
∗
ΣTX̂
Ŵ1 = VX̂
W
(18)
W
Δ
X̂W =
X1 S̃H
1
,
P1
T
NT 1
(19)
where
H
X̂W = UX̂W ΣX̂W VX̂
.
W
S 0 EH
0
=
,
T0
Δ
Δ
We apply the WR-based semiblind channel estimator for the
channel estimation at the LR. First, the whitening matrix of H
is estimated as
by performing SVD on the matrix
NL T
∗
H ΔRS0 ,E0 + ΔRH
ΔRX0 =
S0 ,E0 H + ΔRE0 ,E0 ,
P0
(13)
where the cross correlation matrices ΔRS0 ,E0 , ΔRE0 ,E0 are
defined as follows, respectively
ΔRE0 ,E0 =
Δ
(12)
From (12), the error of RX0 has the following form
ΔRS0 ,E0
where
Ẽ1 = HNŴ0 A + E1 .
by performing SVD on RX0 . By using (2), the autocorrelation
matrix RX0 can be expressed by
RX0 = HT H∗ + ΔRX0 .
2403
(15)
2) Step II. Forward Training Phase: For the forward training phase, the design of forward training sequence is required
to enable the LR to interpret the downlink channel information
but degrade the channel performance at the UR. Specifically,
the new forward training signal is given by
P1
Δ
S1 =
T1 C1 + NŴ0 A,
(16)
NT
where NŴ0 ∈ CNT ×(NT −NL ) is the orthogonal complement space matrix of Ŵ0 satisfying Ŵ0T NŴ0 = 0 and
NH
NŴ0 = INT −NL . Compared to (4), (16) utilizes the left
Ŵ
After that, the unitary rotation matrix of H can be obtained by solving the following optimization problem under the
perturbation-free case,
2
NL NT
∗
X1 (i) −
σ̂
q
(j)
LR : min f (Q) =
Ŝ
j ij 1
i=1 j=1
F
s.t.
QQ
H
= IN L ,
(20)
H
where Ŝ1 = VX
S̃ , X1 (i) represents the ith column of
W 1
X1 , and Ŝ1 (j) refers to the jth column of Ŝ1 , respectively.
By using the Lagrange method (the derivation can be found
in Appendix A), the unitary rotation matrix is calculated as
follows
H
Q̂1 = UX̂Q VX̂
(21)
Q
by performing SVD on the matrix
Δ
X̂Q =
X∗1 S̃T1 Ŵ1
P1
NT T1
(22)
where
H
X̂Q = UX̂Q ΣX̂Q VX̂
.
Q
0
ĤT0
null space of Ŵ0 instead of
for the generation of AN.
In fact, the left null spaces of the matrices Ŵ0 and ĤT0
are essentially the same because the matrix Ŵ0 has all the
eigenvalues of ĤT0 . We denote the first term of (16) as
P1
T 1 C1 .
S̃1 =
NT
The LR may suffer from the imperfect estimation of W0 due
to the interference of AN, thus the power between P1 and σa2
needs to be allocated carefully.
a) Channel Estimation at the LR: Using (5) and (16), the
received signal matrix at the LR can be rewritten as follows
LR : X1 = HS̃1 + Ẽ1 ,
(17)
According to (8), the legitimate channel H is estimated by
Ĥ1 = Q̂∗1 Ŵ1T .
b) Channel Estimation at UR: Likewise, the wiretape
channel G is decomposed as
G = MRH ,
(23)
where M ∈ CNU ×NT is the whitening matrix, and R ∈
CNT ×NT is the unitary rotation matrix. Besides, G can be
decomposed by SVD as follows
H
,
G = U G Σ G VG
(24)
where diag(ΣG ) = [γ1 , . . . , γNU ]T . Without loss of generality, we assume that M = UG ΣG and R = VG .
2404
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 62, NO. 7, JULY 2014
Likewise, the UR employs the WR-based semiblind channel
estimator for its channel estimation. The received signal matrix
of (6) can be rewritten as follows
UR : Y1 = GS̃1 + F̃1 ,
(25)
Δ
where F̃1 = GNŴ0 A + F1 . Then, the whitening matrix of G
is obtained as
M̂ = UŶM ΣŶM
Notice that NTŴ Ŵ0 = 0, (31) is rewritten as
0
NT T
1
∗
∗
T
H
ΔW1 =
Q
ΔRS̃ ,E − ΔRS̃ ,A NŴ ΔRS0 ,E0 .
1
1
1
0
P1
P0
(32)
Next, we deduce the closed-form expression of ΔQ1 . Using
the result of [22], ΔQ1 equals to
ΔQ1 ≈ Q(ΓQ ◦ ΠQ )H ,
(26)
where
by performing SVD to the matrix
⎡
H
Δ Y1 S̃
ŶM = P1 1
NT T1
(33)
,
⎢
⎢
ΓQ = ⎢
⎣
(27)
where
1
,
2ξ12
1
,
ξ22 +ξ12
1
,
2
ξN
+ξ12
...
1
, ξ2 +ξ
2
1
...
....
...
NL
1
, ξ2 +ξ
2
2
NL
, 2ξ12
⎤
⎥
⎥
⎥
⎦
(34)
NL
L
and
H
.
ŶM = UŶM ΣŶM VŶ
M
Next, the rotation matrix of G is calculated using the
training-based method [22],
R̂ = VŶR UH
Ŷ
(28)
R
Δ
M̂H Y1 S̃H
1
,
P1
T
NT 1
(29)
Δ
NT
ΔRTS̃ ,Ẽ W.
1
1
P1
(36)
Therefore, we have
ΔXQ = H∗ ΔW1 +
where
NT
ΔRTS̃ ,Ẽ W.
1
1
P1
(37)
Substituting (37) into (35), we have
H
.
ŶR = UŶR ΣŶR VŶ
R
ΠQ = 0.
Using (26) and (28), the wiretap channel G is calculated by
Ĝ = M̂R̂H .
C. DCE Performance Analysis
A quantitative analysis of power allocation is offered for the
optimal DCE scheme in this Section.
1) Channel Estimation Performance at the LR: To analyze
channel estimation performance, we define the perturbation
Δ
Δ
errors of Ŵ1 and Q̂1 by ΔW1 = Ŵ1 − W and ΔQ1 =
Q̂1 − Q, respectively. The estimation error of H at the LR is
given by
Δ
ΔH1 = Ĥ1 − H
= Q̂∗ Ŵ1T − Q∗ W1T ≈ Q∗ ΔW1T + ΔQ∗1 WT .
(30)
First, we derive the closed-form expression of ΔW1 . Similar to (15), ΔW1 has the following expression
ΔW1 =
(35)
To derive the perturbation error of ΔXQ , we define X̂Q =
XQ + ΔXQ . Using (5), (22) is modified as
X̂Q = H∗ W + H∗ ΔW1 +
by performing SVD to the matrix
ŶR =
H
ΠQ = ΔXH
Q Q − Q ΔXQ .
NT T
Q ΔR∗S̃ ,Ẽ ,
1
1
P1
(38)
As a result, (33) is summarized as ΔQ1 = 0, and the perturbation error of Ĥ1 is given by
P1
NL
∗
∗
T
H
ΔH1 =
ΔRS̃ ,A NŴ ΔRS0 ,E0 .
ΔRS̃ ,E −
1
1
1
0
NT
P0
(39)
Similar to the derivation of [22], the NMSE criterion like [24]
of the estimate matrix H at the LR is given by
H
Δ Tr E ΔH1 ΔH1
NMSEL =
NL NT
NT σ02
NL (NT − NL )σa2 NT σ02
=
+
. (40)
P1 T 1
P0 T 0
P1 T 1
2) Channel Estimation Performance at the UR: We define
Δ
the perturbation errors of M̂ and R̂ by ΔM = M̂ − M and
Δ
ΔR = R̂ − R, respectively. In the following, the estimation
error of channel G is given by
Δ
ΔG = Ĝ − G
= M̂R̂H − MRH ≈ MΔRH + ΔMRH . (41)
(31)
First, we derive the closed-form expression of ΔM. Similar
to (15), ΔM has the following expression
where
ΔRS̃1 ,Ẽ1 = ΔRS̃1 ,E1 + ΔRS̃1 ,A NH
HH .
Ŵ
0
ΔM =
NT
ΔRH
R,
S̃1 ,F̃1
P1
(42)
YANG et al.: SEMIBLIND TWO-WAY TRAINING METHOD FOR DCE IN MIMO SYSTEMS
where
2405
estimation error at the UR. Hence, we formulate the power
allocation as the following optimization problem
Δ
ΔRS̃1 ,F̃1 = ΔRS̃1 ,A NH
GH + ΔRS̃1 ,F1 .
Ŵ
0
min
2 0
P0 ,P1 >0,σa
Next, we deduce the closed-form expression of ΔR. Similar
to (33), the perturbation matrix of R̂ is given by
ΔR ≈ R(ΓR ◦ ΠR ),
⎡
ΓR
⎢
⎢
=⎢
⎣
1
,
2γ12
1
,
γ22 +γ12
1
,
2
γN
+γ12
...
1
...
....
...
,
(50a)
P0 ≤ Pave
(50b)
P1 + (NT − NL )σa2 ≤ Pave ,
(50c)
(43)
⎤
1
, γ 2 +γ
2
NU
1
2
γ22 +γN
, 2γ12
U
⎥
⎥
⎥
⎦
(44)
where γ > 0 refers to the threshold of the UR’s achievable
NMSE, and Pave is the total energy constraint of the training
signal. We define x = P1 T1 /NT , y = (NT − NL )σa2 , z = P0 .
Then, the problem (50) can be reformulated as
NU
U
min
and
yNL σ02
σ02
+
x
xz
(51)
yσ 2
σ02
+ G ≥ γ,
x
x
(51a)
z ≤ Pave ,
(51b)
x>0,y≥0
H
ΠR = RH ΔYR
− ΔYR R.
(45)
s.t.
Δ
To derive the perturbation error matrix ΔYR , we define ŶR =
YR + ΔYR . Using (6), (29) approximately equals to
ŶR ≈ MH G + ΔMH G +
NT H
M ΔRH
,
S̃1 ,F̃1
P1
ΔYR = ΔMH G +
NT H
M ΔRH
.
S̃1 ,F̃1
P1
xNT
+ y ≤ Pave .
T1
(46)
Therefore,
(47)
Substituting (47) into (45), we have ΠR = 0. As a result, (43)
is summarized as ΔR = 0. Then, the perturbation matrix of Ĝ
is yielded as
NT GNŴ0 ΔRS̃1 ,A + ΔRS̃1 ,F1 .
(48)
ΔG =
P1
(51c)
(51) is a convex optimization problem involving three
variables (x, y, z). We have demonstrated that this threedimensional optimization problem can be solved by a simple
one-dimensional line search [26]. (The proof can be found in
the Appendix B.)
Proposition 1: Let {x∗ , y ∗ , z ∗ } be the optimal solution to the
convex optimization problem in (51) with the constraint that
NT σ02 /Pave T1 ≤ γ ≤ (NT − NL )Pave . The optimal value of
x can be solved by the following one-dimensional optimization
problem
y(x)NL σ02
σ02
+
x
x
xz
2
σG Pave + σ02 T1
σ02
≤x≤
,
2
γ
γT1 + NT σG
min
In consequence, the NMSE criterion of estimate G at the UR is
derived by
H
Δ Tr E{ΔGΔG }
NMSEU =
NT NU
2
NT σ02 + NT (NT − NL )σa2 σG
=
.
P1 T 1
(50)
NMSEU ≥ γ,
s.t.
where ΓR is
NMSEL
s.t.
(52)
(52a)
where
(49)
Comparing (40) and (49), we find that the NMSE performance at the LR and the UR are mainly relevant to the selection
of power among the training signal and AN. While the power of
training signal becomes stronger, the precision of the channel
estimation is higher for the LR but lower for the UR. Alternatively, the estimation precision is lower for the LR whereas
higher for the UR when the power of training signal becomes
lower. Therefore, a trade-off on power allocation exists between
the training signal and the AN.
3) Optimal Power Allocation Between the Training Signal
and the AN: One needs to allocate the available power between
the training signal and the AN carefully through minimizing
the channel estimation error at the LR while restricting the
y(x∗ ) =
xγ − σ02
,
2
σG
z ∗ = Pave .
The associated values of y ∗ , z ∗ are given by y(x∗ ), Pave ,
respectively.
With Proposition 1, we can construct well on the design of
training sequences for achieving optimal DCE performance.
IV. P ROPOSED DCE S CHEME U NDER THE P ILOT
C ONTAMINATION ATTACK
In this Section, we analyze the performance of our proposed
DCE scheme under the pilot contamination attack.
2406
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 62, NO. 7, JULY 2014
A. The Existing Pilot Contamination Attack
where
Under the existing two-way training scheme, the pilot contamination attack is possible when the reverse training signal
is known by the UR. Notice that the publicly known reverse
training signal provide an opportunity for the UR to make
an adverse influence on the channel estimation at the TX. In
particular, the UR sends the reverse training signal at the same
time as the LR’s transmission during the reverse training phase.
With the additive AWGN matrix F0 ∈ CNT ×T0 , the received
signal at the TX is given by
ΔRS̃1 ,Ẽ1
T
T
X0 = H S0 + E0 + G S̄0 + F0 ,
where
(53)
≈ ΔRS̃1 ,E1 −
NL
ΔRTS0 ,E0 + ΔRTS0 ,F̄0 .
ΔRS̃1 ,A NH
Ŵ
0
P0
Similar to (33), the perturbation error of the unitary rotation
matrix can be deduced as ΔQ1 = 0. Hence, the perturbation
error of the estimate channel Ĥ1 is given by
ΔH1
=
P1
NT
NL
T
ΔRSH0 ,E0+ΔRSH0 ,F̄0 .
ΔRS̃∗ 1 ,A NŴ
ΔRS̃∗ 1 ,E1−
0
P0
S̄0 =
(56)
P̄0
T0 C̄0 ,
NL
With the result of (56), the NMSE criterion of the estimate
channel H1 at the LR is given by
P̄0 is the power of injected fake pilot and pilot matrix C̄0 satisfies that C̄0 C̄H
0 = INL . If the UR knows the reverse training
pilot, then P̄0 = P0 and C̄0 = C0 . For simplicity, we define the
injected noises of (53) as
Δ
F̄0 = GT S̄0 + F0 .
B. The Impact of Pilot Contamination Attack on the Proposed
DCE Scheme
For our proposed two-way training, the reverse training
signal is a private symbols at the LR and only known by itself,
which is randomly generated. Thus, the randomness feature of
the reverse training signal provides a natural way of protecting
against the pilot contamination attack. Possibly, the UR may
try to exploit the received signal from channel B via the blind
detection methods [27], [28]. However, the UR would suffer
from a rotation ambiguity between the estimate channel B̂ and
the original channel B. Therefore, such techniques are still no
use for the UR to interpret the reverse training pilot without the
cooperation of the LR.
Herein, we consider one reasonable scenario that the UR
performs so called pilot contamination attack with a guessingbased way, that is, the pilot matrix C̄0 is randomly generated by
a guess way. Specifically, we mainly discuss the impact on the
NMSE performance of the estimate channel Ĥ1 with such pilot
contamination attack. Using (31) and (53), the perturbation
error of the estimate whitening matrix Ŵ1 can be rewritten as
NT T
Q ΔR∗S̃ ,Ẽ ,
1
1
P1
NT σ02
NL (NT − NL )σa2 NT σ02
+
P1 T 1
P0 T 0
P1 T 1
2
NL (NT − NL )σa2 NT σ02
NU σ G
+
+
.
P1 T 1
P0 T 0
P̄0 T0
(57)
(54)
The pilot contamination attack can be viewed as a form of
malicious signal injection. With the injection of false training
pilot, the UR can degrade the TX’s estimation of uplink channel
HT and also align the wiretap channel estimation for the UR. In
conclusion, the impact of the pilot contamination attack on the
two-way DCE scheme has two folds: a) It reduces the accuracy
of the LR’s estimation of the downlink channel due to the
leakage of AN. b) More seriously, it increases the UR’s channel
performance.
ΔW1 =
NMSEL ≈
(55)
Compared (57) to (40), we find that the third term of (57)
is newly introduced due to the injection of fake training pilot.
Notice that the third term is significantly smaller than the first
of two terms, thus, we can conclude that the pilot contamination
attack only marginally increases the NMSE error at the LR.
Furthermore, we also demonstrate that the scheme of power
allocation via Proposition 1 is still valid under the pilot contamination attack.
V. N UMERICAL R ESULTS
We consider a MIMO wireless system with one LR and one
UR. In the system, we have NT = 4, NL = 2 and NU = 2.
Channel matrices H or G are i.i.d. complex Gaussian random
2
2
= σG
= 1);
variables with zero mean and unit variance (σH
and the additive noise matrices E0 , E1 or F1 are i.i.d. AWGN
with σ02 = 0.01. We set the maximum transmission power
as 30 dBm, i.e., Pave = 1. The reverse pilot matrix and the
H
forward pilot matrix satisfy that C0 CH
0 = I N L , C1 C1 = I N T ,
respectively. Moreover, the overall training length is given as
T = 280, in which T0 = T1 = 140. The parameter γ [17] is
set as 0.03 and 0.1, respectively. With Pave = 1, the criterion
of signal-to-noise ratios (SNRs) at the LR and the UR is
defined as
SNRL =
EHS1 2F
1
2 = σ2 ,
EE1 F
0
SNRU =
EGS1 2F
1
2 = σ2 ,
EF1 F
0
(58)
where SNRL = SNRU . Herein, the DCE scheme based on
the LMMSE channel estimator in [18] is employed as a fair
comparison to the proposed DCE scheme based on the WR
channel estimator. In the following, the scheme in [18] is called
YANG et al.: SEMIBLIND TWO-WAY TRAINING METHOD FOR DCE IN MIMO SYSTEMS
2407
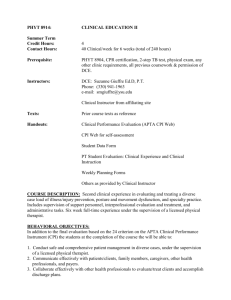
Fig. 2. Power allocation among the training signal and AN in our proposed
DCE scheme.
as LMMSE-based DCE scheme, and the proposed scheme is
named as WR-based DCE scheme. The result of each DCE
scheme is obtained over 100,000 Monte Carlo running. We
first demonstrate the efficiency of the proposed DCE scheme.
Both the LR and the UR exploit their channel estimation with
the received signal. The optimal power value among P1 and
σa2 can be calculated via the optimized solution of (52). Fig. 2
shows that more power is needed for the forward training signal
than the AN at the SNR levels arranged from 10 dB to 40 dB.
There is a minor variation between the power of forward
training signal and the AN at all SNR levels, that is, the power
of forward training signal keeps a stable state while the power
of AN decreases slightly with the increasing of the SNR level.
This observation indicates that the power allocation solution has
a stable performance.
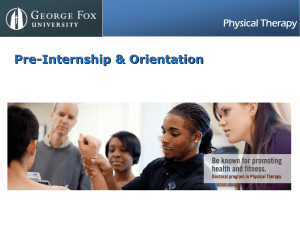
From Fig. 3(a) and Fig. 3(b), it is found that the NMSE performance at the LR with the WR-based DCE scheme achieves
better DCE performance than the LMMSE-based DCE scheme.
By assuming that the TX knows perfect CSI of the uplink
channel, we illustrate the ideal lower bound of NMSE with
the proposed DCE scheme in the following figures. The gap
between the ideal lower bound with perfect CSI and the NMSE
error at the LR with the LMMSE-based DCE scheme is wide
while it is very close to the WR-based DCE scheme. Furthermore, Fig. 3(c) shows the relationship between NMSE at the LR
and the length of training sequence. The NMSE performance
at the LR improves the DCE performance with longer training
symbols. Although our simulation results are shown for the
scenario where the LR and UR are at the same distance from the
TX (σ 2H = σ 2G ), the proposed DCE scheme works well even if
the UR is much closer to the TX as long as the transmit power is
sufficiently large. The reason is that the SNR at the UR does not
change much with distance when the inserted AN dominates the
noise at the UR.
We then look into the performance of the proposed WRbased DCE scheme under a pilot contamination attack. As
discussed in Section IV, the UR has no priori knowledge of
the reverse training signal. Thus, we suppose that the UR sends
a guess-based orthogonal signal matrix S̄0 to attack the training
Fig. 3. NMSE performance comparison between the LMMSE-based DCE
scheme and the WR-based DCE scheme. (a) γ = 0.03; (b) γ = 0.1;
(c) variation of T1 when SN RL = 25 dB.
process, in which P̄0 = Pave = 1. From Fig. 4(a), one can see
that the NMSE performance at the LR with LMMSE-based
DCE scheme has approximately reached to the limitation of
the UR’s NMSE due to the poor channel estimation. On the
contrary, the NMSE performance at the LR with the proposed
2408
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 62, NO. 7, JULY 2014
Furthermore, Fig. 4(c) shows the impact of pilot contamination attack on the performance of DCE scheme with a variation
of attacking power. Since the LMMSE-based DCE scheme
works not very well under the pilot contamination attack, we
only focus on the performance of the proposed DCE scheme
herein. The result shows that the obtained NMSE error at
the LR has a slight reduction with the increasing power P̄0 .
Notice that the attacking power is restricted at the UR, hence,
the pilot contamination attack has an ignorable impact on the
performance of our proposed DCE scheme.
VI. C ONCLUSION
In this paper, we proposed a new two-way training scheme
for DCE in wireless MIMO systems. To improve the DCE
performance, an efficient whitening-rotation (WR) based semiblind approach has been employed in the two-way training. A
closed-form of NMSE on the channel estimation between the
LR and the UR have been developed, facilitating optimal power
allocation between the training signals and the AN. Furthermore, the proposed training scheme offers a countermeasure
against the pilot contamination attack. It has been proved that
the pilot contamination attack has a very limited impact on the
DCE performance. Simulation results have demonstrated that
our proposed scheme can achieve higher performance than the
existing training scheme.
Our future work includes the following directions of research: (a) We will extend the study of DCE from narrowband
systems to wideband OFDM-based systems [29]. The power
allocation between the training signal and AN across all pilot subcarriers will be an interesting problem to investigate.
(b) We will apply the semiblind two-way training method to
tackle the pilot contamination problem in multi-cell massive
MIMO systems.
A PPENDIX A
D ERIVATION OF U NITARY ROTATION M ATRIX
According to (20), the rotation matrix Q can be obtained by
using Lagrange method as follows,
2
NL NT
∗
σ̂j qij Ŝ1 (j)
LR : min f (Q, λ, μ) =
X1 (i) −
i=1 j=1
+
NL
F
NL
NL Re λi qiH qi − 1 +
Re μij qiH qj .
i=1
i=1 j=i+1
(59)
By differentiating (59) w.r.t Q and let it equals to 0, we have
Fig. 4. NMSE performance of the LMMSE-based DCE scheme and the WRbased DCE scheme under the pilot contamination attack. (a) γ = 0.03; (b) γ =
0.1; (c) variation of P̄0 when the noise levels are set as 15 dB, 25 dB, 35 dB,
respectively.
DCE scheme only has a slight reduction. Similar results are
also observed in Fig. 4(b) in the case of γ = 0.1. As a result,
the LMMSE-based DCE scheme is more sensitive to the pilot
contamination attack than our proposed DCE scheme.
X∗1 S̃T1 Ŵ1 − QŴ1T S̃1 S̃H
1 Ŵ1 = QΘ,
(60)
where Θ is the matrix of Lagrange multipliers which satisfies
Θii = λi , Θij = μij when i > j and Θij = μ∗ij when i < j.
We divide (P1 /NT )T1 on both sides of (60), and denote
Δ
X̂Q =
X∗1 ŜT1 Ŵ1
.
P1
NT T1
YANG et al.: SEMIBLIND TWO-WAY TRAINING METHOD FOR DCE IN MIMO SYSTEMS
Using the conjugate symmetry feature of Θ, we premultiply
QH to (60) and post-multiply QH to the conjugate of (60).
Performing a subtraction between the two new equations, we
have
QH X̂Q = X̂H
Q Q.
(61)
According to the specific structure of (61), it holds if and
only if
H
,
Q̂1 = UX̂Q VX̂
(62)
Q
where UX̂Q and VX̂Q are the decomposition results after
H
.
performing SVD on X̂Q , e.g., X̂Q = UX̂Q ΣX̂Q VX̂
Q
A PPENDIX B
D ERIVATION OF O PTIMUM P OWER A LLOCATION
First, we need to develop the range of parameter γ. For the
extreme case when y = 0, we know that
x≤
Pave T1
NT
(63)
by using the power constraint of (51c). In this case, γ has the
lower bound
γ≥
NT σ02
.
Pave T1
(64)
To obtain the upper bound of γ, we need to analyze the NMSE
error performance at the UR when x = 0. Similar to (42), the
perturbation matrix of M can be rewritten as
H
ΔM ≈ ΔRH
A,F1 NŴ R.
0
(65)
In this case, we have the result as follows
N M SEU ≈ (NT − NL )Pave .
(66)
This result implies the worst MNSE performance at the UR, so
we can obtain the upper bowed of γ,
γ ≤ (NT − NL )Pmax .
(67)
For the variable y, it satisfies the following inequations as
xNT
xγ − σ02
≤ y ≤ Pave −
2
σG
T1
(68)
by using the constraints of (51a) and (51c). Besides, the inequations of (68) holds if and only if
Pave −
xNT
xγ − σ02
≥
.
2
T1
σG
(69)
Thus, x satisfies
2
σG Pave + σ02 T1
σ02
≤x≤
.
2
γ
γT1 + NT σG
(70)
2409
From the optimal problem (51), the objective function is monotonically decreasing with respect to the variable y, so the
optimal value can be achieved when
y∗ =
xγ − σ02
.
2
σG
(71)
Furthermore, z is independent from x and y, thus the objective
function approaches its optimization point when z ∗ = Pave .
R EFERENCES
[1] A. Wyner, “Wire-tap channel,” Bell Syst. Tech. J., vol. 54, no. 8, pp. 1355–
1387, Oct. 1975.
[2] I. Csiszár and J. Körner, “Broadcast channels with confidential messages,”
IEEE Trans. Inf. Theory, vol. IT-24, no. 3, pp. 339–348, May 1978.
[3] M. Bloch and J. Barros, Physical-Layer Security: From Information Theory to Security Engineering. Cambridge, U.K.: Cambridge Univ. Press,
2011.
[4] X. Zhou, L. Song, and Y. Zhang, Physical Layer Security in Wireless
Communications. Boca Raton, FL, USA: CRC Press, 2013.
[5] N. Yang, H. Suraweera, I. Collings, and C. Yuen, “Physical layer security of TAS/MRC with antenna correlation,” IEEE Trans. Inf. Forensics
Security, vol. 8, no. 1, pp. 254–259, Jan. 2013.
[6] P. Gopala, L. Lai, and H. E. Gamal, “On the secrecy capacity of fading
channels,” IEEE Trans. Inf. Theory, vol. 54, no. 10, pp. 4687–4698,
Oct. 2008.
[7] X. Chen, L. Lei, H. Zhang, and C. Yuen, “On the secrecy outage capacity of physical layer security in large-scale MIMO relaying systems
with imperfect CSI,” in Proc. IEEE ICC, Sydney, NSW, Australia, 2014,
pp. 1–6.
[8] N. R. Zurita, M. Ghogho, and D. M. Lernon, “Physical layer security of
MIMO-OFDM systems by beamforming and artificial noise generation,”
Phys. Commun., vol. 4, no. 4, pp. 313–321, Dec. 2011.
[9] A. Mukherjee and A. L. Swindlehurst, “Robust beamforming for security
in MIMO wiretap channels with imperfect CSI,” IEEE Trans. Signal
Process., vol. 59, no. 1, pp. 351–361, Jan. 2011.
[10] X. Wang, K. Wang, and X. D. Zhang, “Secure relay beamforming with
imperfect channel side information,” IEEE Trans. Veh. Technol., vol. 62,
no. 5, pp. 2140–2155, Jun. 2013.
[11] L. Y. Song, “Relay Selection for Two-way Relaying with Amplify-andForward Protocols,” IEEE Trans. Veh. Technol., vol. 60, no. 4, pp. 1954–
1959, May 2011.
[12] L. Y. Song, Y. H. Li, and B. L. Jiao, “Differential Modulation for Bidirectional Relaying With Analog Network Coding,” IEEE Trans. Signal
Process., vol. 58, no. 7, pp. 3933–3938, Jul. 2010.
[13] L. Y. Song, H. Guo, B. L Jiao, and M. Debbah, “Joint Relay Selection
and Analog Network Coding Using Differential Modulation in Two-Way
Relay Channels,” IEEE Trans. Veh. Technol., vol. 59, no. 6, pp. 2932–
2939, Jul. 2010.
[14] S. Goel and R. Negi, “Guaranteeing secrecy using artificial noise,” IEEE
Trans. Wireless Commun., vol. 7, no. 6, pp. 2180–2189, Jun. 2008.
[15] X. Zhou and M. R. McKay, “Secure transmission with artificial noise over
fading channels: Achievable rate and optimal power allocation,” IEEE
Trans. Veh. Technol., vol. 59, no. 8, pp. 3831–3842, Oct. 2010.
[16] X. Zhang, X. Zhou, and M. R. McKay, “On the design of artificial-noiseaided secure multi-antenna transmission in slow fading channels,” IEEE
Trans. Veh. Technol., vol. 62, no. 5, pp. 2170–2181, Jun. 2013.
[17] T.-H. Chang, W.-C. Chiang, Y.-W. Hong, and C.-Y. Chi, “Training sequence design for discriminatory channel estimation in wireless MIMO
systems,” IEEE Trans. Signal Process., vol. 58, no. 12, pp. 6223–6237,
Dec. 2010.
[18] C.-W. Huang, T.-H. Chang, X. Zhou, and Y.-W. P. Hong, “Two-way training for discriminatory channel estimation in wireless MIMO systems,”
IEEE Trans. Signal Process., vol. 61, no. 10, pp. 2724–2738, May 2013.
[19] X. Zhou, B. Maham, and A. Hjørungnes, “Pilot contamination for active
eavesdropping,” IEEE Trans. Wireless Commun., vol. 11, no. 3, pp. 903–
907, Mar. 2012.
[20] C. R. Murthy, A. K. Jagannatham, and B. D. Rao, “Training-based and
semiblind channel estimation for MIMO systems with maximum ratio
transmission,” IEEE Trans. Signal Process., vol. 54, no. 7, pp. 2546–2558,
Jul. 2006.
[21] A. K. Jagannatham and B. D. Rao, “Whitening-rotation-based semiblind
MIMO channel estimation,” IEEE Trans. Signal Process., vol. 54, no. 3,
pp. 861–869, Mar. 2006.
2410
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 62, NO. 7, JULY 2014
[22] F. Wan, W. P. Zhu, and M. N. Swamy, “A signal perturbation free
whitening-rotation-based semiblind approach for MIMO channel estimation,” IEEE Trans. Signal Process., vol. 57, no. 8, pp. 3154–3166,
Aug. 2009.
[23] H. Holma and A. Toskala, WCDMA for UMTS, vol. 4. New York, NY,
USA: Wiley, 2000.
[24] S. M. Kay, Fundamentals of Statistical Signal Processing: Estimation
Theory. Englewood Cliffs, NJ, USA: Prentice-Hall, 1993.
[25] G. H. Gene, V. Loan, and F. Charles, Matrix Computations, 3rd ed.
Baltimore, MD, USA: The Johns Hopkins Univ. Press, 1996.
[26] M. Chiang, C. W. Tan, D. P. Palomar, D. O’Neill, and D. Julian, “Power
control by geometric programming,” IEEE Trans. Wireless Commun.,
vol. 6, no. 7, pp. 2640–2651, Jul. 2007.
[27] V. Buchoux, O. Capper, E. Moulines, and A. Gorokhov, “On the performance of semiblind subspace-based channel estimation,” IEEE Trans.
Signal Process., vol. 48, no. 6, pp. 1750–1759, Jun. 2000.
[28] S. Shahbazpanahi, A. Gershman, and J. Manton, “Closed-form blind
MIMO channel estimation for orthogonal space-time block codes,” IEEE
Trans. Signal Process., vol. 53, no. 12, pp. 4506–4517, Dec. 2005.
[29] A. Vinel, Q. Ni, D. Staehle, and A. Turlikov, “Capacity analysis of
reservaion-based random access for broadband wireless access networks,”
IEEE J. Sel. Areas Commun., vol. 27, no. 2, pp. 172–181, Feb. 2009.
Junjie Yang received the M.S. degree in applied
mathematics from Guangdong University of Technology, Guangzhou, China, in 2011. He is currently
working toward the Ph.D. degree at Guangdong
University of Technology under the supervision of
Prof. S. Xie. His current research interests include
blind signal processing, physical-layer security, and
smart-grid cyber security.
Shengli Xie (M’01–SM’02) received the M.S.
degree in mathematics from Central China Normal
University, Wuhan, China, in 1992 and the Ph.D.
degree in control theory and applications from South
China University of Technology, Guangzhou, China,
in 1997.
He is currently a Full Professor and the Vice
Head of the Institute of Automation and Radio Engineering with Guangdong University of Technology,
Guangzhou. He is the author or coauthor of two
books and more than 70 scientific papers in journals
and conference proceedings. His research interests include automatic control
and blind signal processing. Dr. Xie received the Second Prize in China’s State
Natural Science Award in 2009 for his work on blind source separation and
identification.
Xiangyun Zhou (S’08–M’11) received the B.E.
(Hons.) degree in electronics and telecommunications engineering and the Ph.D. degree in telecommunications engineering from The Australian
National University (ANU), Canberra, Australia,
in 2007 and 2010, respectively. From June 2010 to
June 2011, he worked as a Postdoctoral Fellow with
UNIK-University Graduate Center, University of
Oslo, Norway. He is currently a Lecturer with ANU.
His research interests include communication theory
and wireless networks.
Dr. Zhou serves on the editorial board of the following journals: IEEE C OM MUNICATIONS L ETTERS , Wiley Security and Communication Networks, and
Ad Hoc & Sensor Wireless Networks. He has also served as a Workshop Chair
and as a Technical Program Committee member of major IEEE conferences.
Currently, he is the Chair of the ACT Chapter of the IEEE Communications
and Signal Processing Societies. He is a recipient of the Best Paper Award at
the 2011 IEEE International Conference on Communications.
Rong Yu (S’05–M’08) received the Ph.D. degree
from Tsinghua University, Beijing, China, in 2007.
Then, he was with the School of Electronic and
Information Engineering, South China University of
Technology, Guangzhou, China. Since 2010, he has
been with the Institute of Intelligent Information
Processing, Guangdong University of Technology,
Guangzhou, where he is currently a Full Professor.
He is the co-inventor of over ten patents and the
author or co-author of over 50 international journal
and conference papers. His research interests include
wireless communications and networking, cognitive radio, wireless sensor
networks, and home networking. Dr. Yu is currently serving as the Deputy Secretary General of the Internet of Things (IoT) Industry Alliance, Guangdong,
China, and the Deputy Head of the IoT Engineering Center, Guangdong. He is
a member of the Home Networking Standard Committee in China, where he
leads the standardization work of three standards.
Yan Zhang (M’05–SM’10) received the Ph.D.
degree from Nanyang Technological University,
Singapore. He is currently with the Simula Research
Laboratory, Lysaker, Norway, and is an Adjunct
Associate Professor with the University of Oslo,
Oslo, Norway. His recent research interests include
cognitive radio, smart grid, and machine-to-machine
communications. Dr. Zhang is an Associate Editor
and a Guest Editor for a number of international
journals. He serves as an Organizing Committee
Chair for many international conferences.
 0
0
advertisement
Related documents




Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users