Performance Analysis of Connectivity Probability and Connectivity-Aware MAC Protocol
advertisement

5596
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 64, NO. 12, DECEMBER 2015
Performance Analysis of Connectivity Probability
and Connectivity-Aware MAC Protocol
Design for Platoon-Based VANETs
Caixing Shao, Supeng Leng, Member, IEEE, Yan Zhang, Senior Member, IEEE,
Alexey Vinel, Senior Member, IEEE, and Magnus Jonsson, Senior Member, IEEE
Abstract—Vehicular ad hoc networks (VANETs) can provide
safety and nonsafety applications to improve passenger safety
and comfort. Grouping vehicles into platoons in VANETs can
improve road safety and reduce fuel consumption. It is critical
to design an efficient medium access control (MAC) protocol for
platoon-based VANETs. Moreover, because of the space and time
dynamics of moving vehicles, network connectivity is an important
performance metric to indicate the quality of the network communications and the satisfaction of users. Unfortunately, network
connectivity is often ignored in the design of existing MAC protocols for VANETs. In this paper, we study the connectivity characteristics and present a connectivity-aware MAC protocol for
platoon-based VANETs. The connectivity probabilities are analyzed for vehicle-to-vehicle and vehicle-to-infrastructure communication scenarios in one- and two-way VANETs, respectively.
A multipriority Markov model is presented to derive the relationship between connectivity probability and system throughput.
Based on variable traffic status and network connectivity, a multichannel reservation scheme is adopted to dynamically adjust the
length of the control channel interval and the service channel
interval for the improvement of the system throughput. Analysis and simulation results show that the throughput increases
with connectivity probability. However, with a further increase
in connectivity probability, the throughput will decrease due to
numerous channel contentions.
Manuscript received April 15, 2015; revised July 14, 2015; accepted
August 19, 2015. Date of publication September 17, 2015; date of current
version December 14, 2015. This work was supported in part by the National
Natural Science Foundation of China under Grant 61374189, by the Information Technology Research Projects of the Ministry of Transport of China under
Grant 2014364X14040, by the Fundamental Research Funds for the Central
Universities under Grant ZYGX2013J009, by the EU FP7 Project CLIMBER
under Grant PIRSES-GA-2012-318939, by project 240079/F20 funded by
the Research Council of Norway, by the EU FP7 Project CROWN under
Grant PIRSES-GA-2013-627490, and by the ACDC project funded by the
Knowledge Foundation in Sweden. The review of this paper was coordinated by
Prof. Y. Fang. (Corresponding author: Supeng Leng.)
C. Shao is with the School of Communication and Information Engineering, University of Electronic Science and Technology of China, Chengdu
611731, China, and also with the College of Computer Science and Technology, Southwest University for Nationalities, Chengdu 610041, China (e-mail:
caixingshao@gmail.com).
S. Leng is with the School of Communication and Information Engineering,
University of Electronic Science and Technology of China, Chengdu 611731,
China (e-mail: spleng@uestc.edu.cn).
Y. Zhang is with the Simula Research Laboratory, 1364 Fornebu, Norway,
and also with the University of Oslo, 0316 Oslo, Norway (e-mail: yanzhang@
simula.no).
A. Vinel and M. Jonsson are with Halmstad University, 301 18 Halmstad,
Sweden (e-mail: alexey.vinel@hh.se; magnus.jonsson@hh.se).
Digital Object Identifier 10.1109/TVT.2015.2479942
Index Terms—Connectivity probability, medium access control
(MAC), one-way, platoon, two-way, vehicle-to-infrastructure (V2I),
vehicle-to-vehicle (V2V), vehicular ad hoc networks (VANETs).
I. I NTRODUCTION
V
EHICULAR Ad Hoc Networks (VANETs) have received
significant interest from both academia and industry. In
particular, VANETs have been studied with some popular
technology in recent years. For example, data security and
integrity have been studied in vehicular cloud networks [1].
Moreover, the multikeyword-ranked search schemes over cloud
data were presented in [2] and [3] to achieve efficient cloud
search services. However, communications is also an important
research topic in VANETs. Through vehicle-to-vehicle (V2V)
and vehicle-to-infrastructure (V2I) communications, VANETs
can support safety- and nonsafety-related applications among
vehicles. Specifically, vehicles on the road can communicate
with each other through a multihop ad hoc connection. They can
also access the Internet and other broadband services through
the roadside infrastructure, i.e., roadside units (RSUs) or access
points along the road [4]. When a vehicle moves out of radio
coverage area of an RSU, it may be located in the coverage
gap between two adjacent RSUs and will use its neighboring
vehicles (if any) as relays to access the RSU [5].
Due to the dynamic topology character, the medium access
control (MAC) protocols, which are used in other wireless
networks [6], [7], are not suitable for VANETs. The IEEE
802.11p standard [8] and the IEEE 1609.4 standard [9] have
defined the wireless access in vehicular environments (WAVE)
architecture in the United States to be used in VANET communications. In the standards, one control channel (CCH) and
six service channels (SCHs) are allocated for VANET communications. However, with a contention-based medium access
mechanism and constant length of the CCH interval (CCHI) and
the SCH interval (SCHI), the current WAVE MAC framework
is not efficient to support either delay-sensitive applications
or throughput-sensitive applications [10]. In this case, it is
essential to design an effective MAC protocol to ensure reliable
and efficient packet delivery in VANETs.
Network connectivity is very important for the VANET
communication and applications since it might be difficult to
transfer messages to other vehicles in the case of disconnections [11]. Particularly in a VANET with a highly dynamically changing topology, connectivity has direct influence on
0018-9545 © 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
SHAO et al.: CONNECTIVITY PROBABILITY AND CONNECTIVITY-AWARE MAC PROTOCOL DESIGN FOR VANETS
channel contention and vehicle communications. Moreover, the
efficiency of channel access is also affected by the connectivity. A connectivity-aware (CA) MAC protocol considering the
connectivity and the corresponding number of active nodes can
optimize the system performance in a VANET.
In recent years, platooning has turned into an important
topic in the research area of VANETs. A platoon is a train
of vehicles composed of a leading vehicle and a number of
followers traveling at highway speeds with only a few meters
between them [12]. From the viewpoint of moving behavior and
packet delivery, a platoon can be regarded as a special vehicle
in VANETs rather than an ordinary vehicle or a simple combination of vehicles. Furthermore, the connectivity probability
will change when there are platoons in the network. Hence, the
influence of connectivity on wireless channel access becomes
more complex and interesting when there are platoons in the
VANET.
This paper focuses on the analysis of the connectivity probability and the CA MAC protocol design in platoon-based
VANETs. Our major contributions are listed as follows.
• We investigate the connectivity probability for V2V
and V2I communication scenarios in one- and two-way
platoon-based VANETs. The relationships between the
connectivity probability and some important parameters
are studied, including the traffic density, the coverage of
vehicles, the coverage of the RSU, the distance between
two adjacent RSUs, and the platoon ratio in the VANET.
• A CA MAC protocol is designed for platoon-based
VANETs. Based on the traffic status and network connectivity, the MAC protocol is enhanced by a multichannel
reservation scheme with the CCHI and the SCHI being
dynamically adjusted toward the improvement of the system throughput.
• Packets from the platoons are classified with high priority
to ensure the large bandwidth requirement of multiple platoon members. In this case, a multipriority Markov model
is derived to analyze the performance of the proposed CA
MAC protocol as well as the relationship between the connectivity probability and the system-saturated throughput.
The rest of this paper is organized as follows. Section II
overviews the related work. A platoon-based VANET model
is derived in Section III. Section IV analyzes the connectivity
probabilities in one-way VANETs and two-way VANETs, respectively. The details of the CA MAC protocol and theoretical
analysis are presented in Section V. Performance evaluation
is presented in Section VI. Finally, Section VII concludes
this paper.
II. R ELATED W ORK
Network connectivity has been studied a lot for conventional
VANETs. In [13], a distributed connectivity improvement strategy has been developed to improve the connectivity of VANETs
to a desired level while minimizing the energy consumption and
signal confliction. In [14], Panichpapiboon and Pattara-atikom
presented a new framework for determining the connectivity
requirements such as the minimum spatial node density and
5597
the minimum required transmission range for distributing traffic
information in VANETs. The effect of the RSU placement on
the connectivity of VANETs and determining the minimum
number of RSUs required to cover a straight road were studied
in [15]. Abdrabou and Zhuang found the lower bound and the
upper bound based on the mobility patterns of the network. In
[16], an analysis model for multihop connectivity of intervehicle communication in both uniform and nonuniform traffic is
presented. It is observed that most of the studies focused on
the connectivity of the VANETs. All of them have considered
neither the influence of the platoon on the connectivity analysis
nor the relationship between the connectivity and the MAC
efficiency in platoon-based VANETs.
A report from the Department of Transportation in America
has indicated that the platooning probability for vehicles on
the highway can be higher than 70% [17]. Particularly in
the free-flow state, vehicles are more likely to form platoons
when they travel in the same direction. Grouping vehicles into
platoons can increase road capacity, reduce traffic congestion,
and improve road safety and energy efficiency [18]. In a platoon, the leading vehicle (normally a truck) is driven by a
human, whereas the followers either automatically maintain
the velocity of the leading vehicle, but their direction is still
controlled by the driver, or follow the leading vehicle in a fully
automatic manner [19]. These special features challenge the
MAC protocol design for platoon-based VANETs.
There are some studies on data access schemes for the
platoon-based VANETs. In [20], Zhang et al. proposed a
novel vehicle-platoon-aware data access scheme to improve
the data access performance in VANETs. Simulation results
showed that through cooperation between the platoon members, data availability can be improved, and data access delay can be reduced. However, too many data replicates will
exhaust the storage buffers of the platoon members. In [21],
a cooperative retransmission scheme that exploits platoons
to improve the uplink performance of VANETs is proposed.
Jia et al. regarded a platoon as a cooperative group unit, within
which a vehicle can retransmit the frame for neighbors if the
delivery of the frame failed in the previous transmission due
to the error-prone WAVE channels. Nevertheless, this scheme
ignores the impact of the platoon leader for the data retransmission. None of these studies explore the relationship between
the connectivity and the system performance of the platoonbased VANETs.
III. P LATOON -BASED V EHICULAR A D H OC
N ETWORK M ODEL
In the free-flow state, connectivity becomes the main performance metric for intervehicle communications since a vehicle
may have difficulties delivering messages to other vehicles at
a light load. In our model, we consider a unidirectional and
uninterrupted one-way traffic road in the free-flow state. As
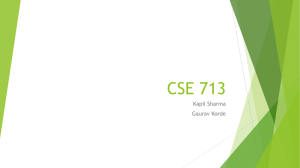
shown in Fig. 1, the VANET consists of N vehicles, which are
randomly distributed along the road segment. It is assumed that
there are K ordinary vehicles and M platoons. Each platoon is
seen as a single vehicle in this context, and platoon members in
each platoon are assumed to be connected with each other and
5598
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 64, NO. 12, DECEMBER 2015
Fig. 1. Platoon based VANET system model (One-way case without RSUs).
can connect with their platoon leader directly. Let p denote the
platoon ratio in the network, which means the probability that a
vehicle on the road segment is a platoon. We have
M
M
p=
=
.
N
(K + M )
(ρx)k e−ρx
, k ≥ 0.
k!
(4)
Since Xi is an i.i.d. random variable, we have
(2)
Let X represent the intervehicle distance between two consecutive vehicles. We can obtain the probability that the distance between two vehicles is smaller than x, which also means
the probability that there is at least one vehicle in an interval
with length x. The probability is given by
Pr{X ≤ x} = h(x) = 1 − e−ρx .
Pc = Pr{X1 ≤ R, X2 ≤ R, . . . , XN −1 ≤ R}.
(1)
Let R1 and R2 (R1 < R2 ) denote the transmission ranges of
the ordinary vehicles and the platoon leaders, respectively. Platoon leaders are trucks with higher-placed antennas. Moreover,
it is assumed that R2 is large enough to cover all the platoon
members in a platoon and the length of the platoon is smaller
than R2 − R1 .
In our model, it is assumed that vehicles are distributed on
the road following a Poisson distribution. Let ρ be the traffic
density in terms of vehicles per meter. Hence, the probability
that k vehicles are found in a distance of x meters is given by
f (k, x) =
R, i.e., Xi ≤ R. Let Pc be the connectivity probability of the
VANET. Then, we have
(3)
Then, we can find that X is independent and identically
distributed (i.i.d.) and obeys an exponential distribution.
IV. A NALYSIS OF THE C ONNECTIVITY P ROBABILITY
Here, the connectivity probability in platoon-based VANETs
is studied. Two network scenarios are considered. One is a V2V
communication scenario where the VANET only consists of
vehicles. The other network scenario is a V2I communication
scenario in which we consider both vehicles and RSUs. Moreover, we study the network connectivity probability in one- and
two-way VANETs, respectively.
A. Connectivity Analysis in the One-Way V2V Scenario
Fig. 1 shows the platoon-based VANET communication scenario without RSUs, where Xi (i = 1, 2, . . . , N − 1) represents
the random variable denoting the intervehicle distance between
two consecutive vehicles. In this scenario, the VANET will be
connected if there is a path connecting any pair of vehicles. This
shows that the distance between any two consecutive vehicles
should be smaller than the transmission range of the vehicles
Pc =
=
N
−1
i=1
N
−1
Pr {Xi ≤ R}
[(1 − p) ∗ Pr {Xi ≤ R1 } + p ∗ Pr {Xi ≤ R2 }] . (5)
i=1
Equation (5) describes the relationship among the key parameters, i.e., the connectivity probability, the transmission range of
the vehicles, and the platoon ratio in the network. According to
(3), the connectivity probability of the VANET can be given by
N −1
. (6)
Pc = (1 − p)(1 − e−ρR1 ) + p(1 − e−ρR2 )
B. Connectivity Analysis in the One-Way V2I Scenario
In the V2I communication scenario, vehicles can access the
Internet and communicate with other vehicles through RSUs.
Hence, we mainly have interest in the connection between
the vehicles and the RSUs. We consider the communication
between the vehicles and an RSU within two hops. We study
one-hop direct access and two-hop access via a relay situation,
where an arbitrary vehicle can use a neighboring vehicle located
in the coverage as its relay to access the RSU.
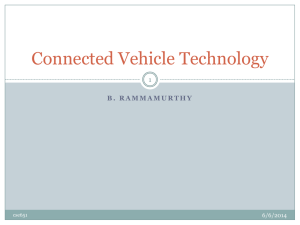
Fig. 2 shows a platoon-based VANET bounded by two adjacent RSUs. The distance between the two adjacent RSUs is
denoted as L. Let RRSU denote the transmission range of the
RSU. Vehicles within the coverage range of their neighboring
RSU can directly access the RSU in one hop, whereas other
vehicles can use a neighboring vehicle located in the coverage
of an RSU as their relay to access the RSU. For instance, Vj is a
vehicle located in the coverage gap between RSU1 and RSU2 ,
and it cannot directly communicate with any of the RSUs.
However, it can use a neighboring vehicle (Vj−1 or Vj+1 ) as
its relay to access the RSUs.
Let Pc denote the connectivity probability that an arbitrary
vehicle can connect with an RSU within two hops. Due to
the different values of the distance of the two RSUs and the
coverage of vehicles and RSUs, the overlapping area between
them will have different situations. Without loss of generality,
we discuss the following five scenarios.
1) 0 < L ≤ 2RRSU : In this case, all the vehicles are under
coverage of two adjacent RSUs and can directly communicate
SHAO et al.: CONNECTIVITY PROBABILITY AND CONNECTIVITY-AWARE MAC PROTOCOL DESIGN FOR VANETS
5599
Fig. 2. One-way platoon-based VANET with RSUs.
with their neighboring RSU. Consequently, the connectivity
probability of the network is 1, i.e., Pc = 1.
2) 2RRSU < L ≤ 2RRSU + R2 : In this case, Fig. 2 shows
that there is a coverage gap between the two RSUs. The
probability that a vehicle is located in the coverage of either
RSU and can connect to either RSU with one hop is 2RRSU /L.
Moreover, the coverage gap is smaller than the transmission
range of the platoon leader. If the vehicle located in the coverage gap is an ordinary vehicle, when L ≤ (2RRSU + R1 ),
the radio coverage of the ordinary vehicle overlaps with the
two RSUs. According to (3), the probability that the ordinary
vehicle can find at least one vehicle in its vicinity as a relay and
connect with either RSU via the relay is
p10
L − 2RRSU
(1 − p) 1 − e−ρ(2RRSU +2R1 −L) .
=
L
(7)
Similarly, when L ≤ (2RRSU + R2 ), if the vehicle located in
the coverage gap is a platoon, its radio coverage overlaps with
the two RSUs. In this case, the probability that the platoon can
connect with either RSU via a relay is
p20
L − 2RRSU p 1 − e−ρ(2RRSU +2R2 −L) .
=
L
(8)
The connectivity probability Pc can be expressed as
Pc =
2RRSU
+ p10 + p20 .
L
p12
2
= (1 − p)
L
2RRSU + 2R1 − L 1 − e−ρ(2RRSU +2R1 −L) .
= (1 − p)
L
(10)
In addition, with the probability (2L − 4RRSU − 2R1 )/L,
the ordinary vehicle can overlap with one RSU. The connectiv-
R1
(1 − e−ρx )dx.
(11)
2RRSU +2R1 −L
If the vehicle located in the gap is a platoon, the connectivity
probability between the platoon and both RSUs is given as
2RRSU + 2R2 − L 1 − e−ρ(2RRSU +2R2 −L) . (12)
p21 = p
L
Moreover, the connectivity probability between the platoon
and one RSU is given by
p22
2
=p
L
R2
(1 − e−ρx )dx.
(13)
2RRSU +2R2 −L
As a result, the overall connectivity probability that the
vehicles can connect with the RSUs can be expressed by
Pc =
2RRSU
+ p11 + p12 + p21 + p22 .
L
(14)
4) 2RRSU + 2R1 < L ≤ 2RRSU + 2R2 : In this case, when
the vehicle located in the coverage gap is an ordinary vehicle,
it can only overlap with one RSU and p11 = 0. The ordinary
vehicle has an overlapping area with one RSU with the probability of 2R1 /L, and the connectivity probability between the
ordinary vehicle and one RSU is given by
(9)
3) 2RRSU + R2 < L ≤ 2RRSU + 2R1 : In this case, if the
vehicle located in the coverage gap is an ordinary vehicle, the
ordinary vehicle has an overlapping area with both RSUs with
the probability (2RRSU + 2R1 − L)/L. If the ordinary vehicle
can find at least one vehicle in its vicinity as a relay, it can
connect with the RSUs. The connectivity probability between
the ordinary vehicle and the RSUs is given by
p11
ity probability between the ordinary vehicle and one RSU is
p∗12
2
= (1 − p)
L
R1
(1 − e−ρx )dx.
(15)
0
If the vehicle located in the gap is a platoon, the platoon can
have an overlapping area with either both RSUs or one RSU.
The connectivity probability between the platoon and the RSUs
will be the same as (12) and (13).
The overall connectivity probability can be given by
Pc =
2RRSU
+ p∗12 + p21 + p22 .
L
(16)
5) L > 2RRSU + 2R2 : In this case, the vehicles located
in the coverage gap can only overlap with one RSU. Hence,
p11 = 0, and p21 = 0. Similarly, we consider the vehicle either
as an ordinary vehicle or as a platoon. If the vehicle located
5600
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 64, NO. 12, DECEMBER 2015
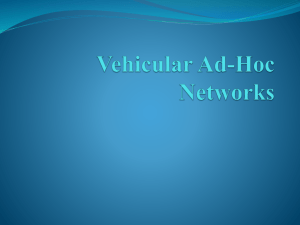
Fig. 3. Two-way platoon-based VANET without RSUs.
in the gap is an ordinary vehicle, the ordinary vehicle has an
overlapping area with one RSU with the probability of 2R1 /L.
The connectivity probability between the ordinary vehicle and
one RSU will be equal to p∗12 .
If the vehicle located in the gap is a platoon, the platoon
has an overlapping area with one RSU with the probability
of 2R2 /L. We have the connectivity probability between the
platoon and one RSU as
p∗22 = p
2
L
R2
(1 − e−ρx )dx.
(17)
0
The overall connectivity probability is given by
Pc =
2RRSU
+ p∗12 + p∗22 .
L
(18)
between VA and VB . The probability that VC is located in the
coverage range of VA and the probability that VD is located in
the coverage range of VB are
PAC = Pr{X ≤ R} = 1 − e−ρR
(21)
PDB = Pr{X ≤ R} = 1 − e−ρR .
Let PCD denote the probability that VC is connected with
VD . Since the distance between VA and VB is X, the probability
that there are k vehicles located in X is given as (2). Then, we
consider that VA can connect with VB via multiple-hop relaying
on the opposite road. It is assumed that there are k vehicles
located in the coverage gap of VA and VB and connected with
each other on the opposite road. According to (3) and (6), the
probability that k vehicles can connect with each other is
k−1
Pkc = (1 − e−ρR )
.
(22)
Pkc dx.
(23)
C. Connectivity Analysis in the Two-Way V2V Scenario
In the two-way V2V communication scenario, it is assumed
that the vehicle densities in the two ways are the same as ρ.
Let Xi (i = 1, 2, . . . , N − 1) represent the intervehicle distance
between two consecutive vehicles. We define the link as broken
if the distance between two consecutive vehicles on the same
road is larger than the transmission range R. Let Pb be the
probability that a link is broken, which is given by
Pb = Pr{X > R} = e−ρR = (1 − p)e−ρR1 + pe−ρR2 . (19)
If the connectivity in a one-way road is less than 1, there
will be broken links on the road. Let J be the random variable
denoting the number of broken links on the eastbound road.
Then, the probability that J of N − 1 will be broken has a
binomial distribution and can be given by
N −1
Pbj (1 − Pb )N −1−j .
(20)
PJ (j) =
j
As shown in Fig. 3, the distance between VA and VB is
larger than R. Hence, there is a broken link on the eastbound
road between vehicles VA and VB . However, in the two-way
scenario, the two vehicles can connect with each other if there
are vehicles located in their coverage gap and connected with
each other on the opposite road. For example, VC and VD are on
the westbound road and located in the coverage gap of VA and
VB , respectively. If VC is connected with VD , then the vehicles
on the westbound road can forward the packets transmitted
PCD can be given by
PCD =
∞ F
f (k, x)
∞
R k=1
y k e−ρy dy
R
Then, we can obtain the probability that a broken link between VA and VB is connected, which means that there are F
connected vehicles located between them on the opposite road.
It follows that
pbc = PAC PCD PDB
= (1 − e
−ρR 2
)
∞ F
R k=1
xk e−ρx
∞
Pkc dx.
(24)
y k e−ρy dy
R
Let Pc|J be the conditional connectivity probability when
there are J broken links on the eastbound road. Since the
probability that each broken link is connected via a relay is
independent of all the other broken links, we get
Pc|J = pjbc ,
j = 0, 1, . . . , N − 1.
(25)
When all the J broken links are connected via relays on
the opposite road, the network will be connected. Based on
the condition shown in (20) and applying the law of total
SHAO et al.: CONNECTIVITY PROBABILITY AND CONNECTIVITY-AWARE MAC PROTOCOL DESIGN FOR VANETS
5601
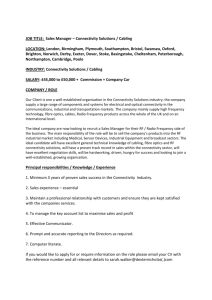
Fig. 4. Two-way platoon-based VANET with RSUs.
probability, the connectivity probability in the two-way scenario via the relay vehicles on the opposite road is
Pc =
=
N
−1
j=0
N
−1
j=0
Pc|J .PJ (j)
N −1
Pbj (1 − Pb )N −1−j .
j
pjbc .
(26)
When J = 0, there are no broken links on the eastbound
road, which means that all the vehicles are connected on the
eastbound road. Then, the connectivity probability is
0
N −1
p0bc .
Pb0 (1 − Pb )N −1
Pc =
0
j=0
N −1
= 1 − (1 − p)e−ρR1 − pe−ρR2
N −1
= (1 − p)(1 − e−ρR1 ) + p(1 − e−ρR2 )
.
(27)
It can be found that this formula is the same as the conclusion
[see (6)] illustrated in the one-way V2V scenario.
D. Connectivity Analysis in the Two-Way V2I Scenario
In the two-way V2I communication scenario, the connectivity research focuses on the connection between the vehicles
and the RSUs. Vehicles under the coverage of the two RSUs
can directly connect with the RSUs in one hop, whereas other
vehicles can use a neighboring vehicle located in the coverage
of an RSU as their relay to access the RSU. Moreover, apart
from considering the connection on the same road, we study
the connection between the vehicles and the RSU via a neighbor
node on the opposite road.
For instance, as shown in Fig. 4, Vj is outside the coverage of
the two RSUs, and it cannot connect with both RSUs directly
in one hop. In this case, Vj will first find a neighboring vehicle
located in the coverage of the RSU as its relay on the same eastbound road. For example, Vj can connect with RSU2 via Vj−2
or connects with RSU1 via platoon m. Moreover, in the twoway communication scenario, if Vj cannot find a neighboring
relay vehicle on the same eastbound road, it can find a neighboring relay vehicle on the opposite westbound road instead.
Vj can also access RSU1 via its neighbor vehicle Vj+1 and
connects with RSU2 via its neighbor vehicle Vj−1 . As shown in
Fig. 4, the right two-hop links show the paths with which Vj can
connect with RSU2 . Meanwhile, the left two-hop links indicate
the path with which Vj connects with RSU1 . Then, according
to the different relationships of the important parameters in the
two-way V2I communication scenario and similar to the study
in the one-way V2I communication scenario, we consider the
connectivity probability in five different situations.
1) 0 < L ≤ 2RRSU : In this case, all the vehicles on the
two-way road are under the coverage of two adjacent RSUs
and can directly communicate with an RSU. Consequently, the
connectivity probability of the network is 1, i.e., Pc = 1.
2) 2RRSU < L ≤ 2RRSU + R2 : In this case, there will be
a coverage gap between the two RSUs. As shown in Fig. 4,
we can find that the probability that a vehicle is located in the
coverage of either RSU and can connect to either RSU with one
hop is 2RRSU /L. Vehicles are located in the coverage gap of the
two RSUs with the probability (L − 2RRSU )/L. We consider
the vehicle located in the coverage gap of the two RSUs either
as an ordinary vehicle or as a platoon.
If the vehicle located in the coverage gap is an ordinary
vehicle, when L ≤ (2RRSU + R1 ), the radio coverage of the
ordinary vehicle overlaps with the two RSUs. According to (3),
the probability that the ordinary vehicle can find at least one
vehicle in its vicinity as a relay and connect with either RSU
via the relay on the same road is
p1 = 1 − e−ρ(2RRSU +2R1 −L) .
(28)
Moreover, if the ordinary vehicle located in the coverage gap
cannot find a relay on the same road, it can find a neighboring
vehicle on the opposite road as a relay and connect with either
RSU via the relay with the probability, i.e.,
p∗1 = (1 − p1 ) ∗ p1
= e−ρ(2RRSU +2R1 −L) ∗ 1 − e−ρ(2RRSU +2R1 −L) . (29)
5602
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 64, NO. 12, DECEMBER 2015
Then, it can be found that the connectivity probability that an
ordinary vehicle located in the coverage gap of the two RSUs
connects with the two RSUs via a neighboring vehicle as a relay
within two hops in the two-way VANETs is
p10 =
L − 2RRSU
(1 − p) (p1 + (1 − p1 ) ∗ p1 ) .
L
4) 2RRSU + 2R1 < L ≤ 2RRSU + 2R2 : In this case, if the
vehicle located in the coverage gap is an ordinary vehicle, the
ordinary vehicle can only overlap with one RSU and p11 = 0.
The probability that the ordinary vehicle can find a neighboring
vehicle relay on the same road is
(30)
2
p5 =
L
R1
(1 − e−ρx )dx.
When L ≤ (2RRSU + R2 ), if the vehicle located in the
coverage gap is a platoon, its radio coverage overlaps with the
two RSUs. Then, the probability that the platoon can find at
least one vehicle in its vicinity as a relay and connect with either
RSU via the relay on the same road is
The connectivity probability between the ordinary vehicle
and one RSU is
p2 = 1 − e−ρ(2RRSU +2R2 −L) .
p∗
12 = (1 − p) ∗ [p5 + (1 − p5 ) ∗ p5 ] .
(31)
The connectivity probability that the platoon can connect
with the two RSUs via the neighboring vehicle is
p20 =
L − 2RRSU
p (p2 + (1 − p2 ) ∗ p2 ) .
L
(32)
The overall connectivity probability Pc can be expressed as
Pc =
2RRSU
+ p10 + p20 .
L
(33)
3) 2RRSU + R2 < L ≤ 2RRSU + 2R1 : In this case, the
connectivity probability between the ordinary vehicle and both
RSUs is given by
p11 =
2RRSU + 2R1 − L
(1 − p) (p1 + (1 − p1 ) ∗ p1 ) . (34)
L
In this case, the ordinary vehicle can overlap with one RSU.
The probability that the ordinary vehicle located in the coverage
gap can find a neighboring relay vehicle on the same road can
be given by
p3 =
2
L
R1
(1 − e−ρx )dx.
(35)
2RRSU +2R1 −L
Then, the connectivity probability between the ordinary vehicle and one RSU in this scenario is
p12 = (1 − p) ∗ [p3 + (1 − p3 ) ∗ p3 ] .
(36)
(40)
0
(41)
If the vehicle located in the gap is a platoon, the platoon can
have an overlapping area with either both RSUs or one RSU.
The connectivity probability between the platoon and the RSUs
will be the same as (37).
The overall connectivity probability that the vehicles connect
with the RSUs in this scenario can be given by
Pc =
2RRSU
+ p∗
12 + p21 + p22 .
L
(42)
5) L > 2RRSU + 2R2 : In this case, the vehicles located
in the coverage gap can only overlap with one RSU. The
connectivity probability analysis result between the ordinary
vehicle and one RSU in the two-way communication scenario
will be the same as p∗
12 .
In addition, if the vehicle located in the gap is a platoon, then
the connectivity probability between the platoon and one RSU
in the two-way communication scenario is
p∗
22 = p ∗ [p6 + (1 − p6 ) ∗ p6 ]
(43)
where p6 denotes the probability that the platoon located in the
coverage gap can find a neighboring relay vehicle on the same
road and is given by
2
p6 =
L
R2
(1 − e−ρx )dx.
(44)
0
Similarly, the connectivity probabilities between the platoon
and both RSUs or one RSU can be given by
2 −L
p21 = 2RRSU +2R
p (p2 + (1 − p2 ) ∗ p2 )
L
(37)
p22 = p ∗ [p4 + (1 − p4 ) ∗ p4 ]
The overall connectivity probability that the vehicles connect
with the RSUs is given by
where p4 denotes the probability that the platoon located in the
coverage gap can find a neighboring relay vehicle on the same
road to access one RSU and is given by
According to the proposed model derived in Section III and
the given formulas, the relationships between the network connectivity probability with other key parameters in the platoonbased VANETs can be derived, including the traffic density, the
coverage of the vehicles, the coverage of the RSU, the distance
between two adjacent RSUs, and the platoon ratio.
Based on the desired connectivity and the node density, this
analytical result can help the system designer determine the
minimum transmission range required for network connectivity.
It is also helpful in reducing the transmission power and control
radio interference. The connectivity information is very useful
for the design of MAC schemes, broadcast strategies for safety
2
p4 =
L
R2
(1 − e−ρx )dx.
(38)
2RRSU +2R2 −L
Then, the overall connectivity probability Pc in the two-way
communication scenario can be expressed as
Pc =
2RRSU
+ p11 + p12 + p21 + p22 .
L
(39)
Pc =
2RRSU
∗
+ p∗
12 + p22 .
L
(45)
SHAO et al.: CONNECTIVITY PROBABILITY AND CONNECTIVITY-AWARE MAC PROTOCOL DESIGN FOR VANETS
alert messages, and routing protocols in VANETs [17], [18].
Moreover, based on the desired connectivity probability and
the transmission ranges of vehicles, the proper traffic density
and the befitting platoon ratio in the network can be determined, which can be used to control the traffic condition of
the highway for satisfying the connectivity requirement. In
the V2I communication scenarios, the connectivity analytical
results are helpful in deploying the RSUs and controlling the
infrastructure cost, including the minimum number of RSUs
and the minimum radio coverage range of RSUs.
Although, multihop transmission is not easy due to the
dynamic vehicular topology in the V2V communication scenario. However, in a platoon-based VANET, the platoon leaders
can be assumed to have a strategically placed antenna with a
large transmission range, which can help forward and store the
messages from the platoon members or other ordinary vehicles.
This will improve the multihop transmission availability in
the VANET. In this case, the study of the connectivity probability is significant for the multihop transmission in the platoonbased VANETs.
V. C ONNECTIVITY-AWARE M EDIUM ACCESS P ROTOCOL
Based on the connectivity analysis results, a CA MAC
protocol is proposed in this section. A multipriority Markov
model is explored to investigate the relationship between the
connectivity probability and the system throughput. Moreover,
according to variable traffic status and network connectivity, a
multichannel reservation scheme can be adopted to dynamically
adjust the length of the CCHI and the SCHI for the improvement of the system performance.
Based on (6), in a fixed-length road segment, for a given
total number of vehicles, connectivity probability, and vehicle
transmission ranges, the platoon ratio in the network required
for the connectivity is
1
M
1 − e−ρR1 − PcN −1
.
=
p=
e−ρR2 − e−ρR1
(M + K)
(46)
Then, according to (1), the number of platoons (M ) and
the number of ordinary vehicles (K) in the network can be
derived. These two parameters can be used in the following
MAC protocol design to get the optimal system performance.
The framework of the CA MAC protocol is shown in Fig. 5.
In the protocol, the synchronous time interval is further divided
into the adjustable CCHI and SCHI according to traffic conditions. Moreover, the CCHI is further divided into safety interval
(SAFI), WSA interval (WSAI), and ACK interval (ACKI). At
the beginning of the CCHI, the RSU first broadcasts a control
packet called the CA packet to the vehicles under its coverage. The CA packet contains the variable lengths of different
intervals and the order of the nodes sending ACK packets in
the current synchronous period. Vehicles first broadcast safety
packets during the SAFI. Then, during the WSAI, vehicles
acting as service providers contend to access the channel for
broadcasting the WSA packets. When the ACKI starts, vehicles
sequentially reply with ACK packets to confirm the reception
of the safety packets or to reserve the SCH channels with the
5603
Fig. 5. Framework of the CA MAC protocol.
service providers. When the SCHI starts, vehicles that reserved
the SCHs will tune to the specific SCHs to perform service
transmission without packet collision.
In particular, for the low delay requirements of the safety
packets, we divided a special SAFI at the beginning of the
CCHI for the transmission of safety packets. To ensure the realtime and effective delivery of the safety packets, the length
of the SAFI (TSAFI ) is proportional to the total number of
vehicles (N ) in the network, which can support all the vehicles
in the network to send a safety packet in a synchronous period.
In practice, not all the nodes will send the safety packet.
Hence, the length of the SAFI is long enough to ensure the
transmission of the safety packets. The delay of the safety packets will be very low. The details of the proposed MAC protocol
are as follows.
A. Variable CCHI and SCHI Schemes
According to the IEEE 1609.4 standard [9], the CCHI and the
SCHI are constant. However, when there are traffic accidents
on the road, hundreds of cars will access the CCH to transmit
control packets and safety packets, which will cause severe
channel congestion. On the other hand, when there are only a
few safety packets but a lot of service packets in the network,
the limited SCH length makes it hard to provide sufficient
delivery capability for service applications.
In our protocol, the CCHI and the SCHI can be dynamically adjusted according to the current connectivity probability
(Pc ) and the channel status. The length of ACKI (TACKI ) is
proportional to the total number of vehicles in the network
(N ). The optimal length of the WSAI (TWSAI ) can be got
from the Markov model of the WSA packets. Then, each
RSU periodically calculates the optimal durations of the CCHI
(TCCHI = TSAFI + TWSAI + TACKI ) and the SCHI (TSCHI =
100 − TCCHI ) and broadcasts a CA packet to the vehicles under
its radio coverage. Finally, these vehicles receiving the CA
packet will adjust the CCHI and the SCHI accordingly.
When there is no RSU in the network, every platoon leader
can work as a temporary coordinator. It will collect the current
vehicle information within its radio coverage range, including
the number of nodes and the channel status. Then, each platoon leader periodically calculates and broadcasts the optimal
duration of the CCHI and the SCHI. Other platoon leaders will
5604
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 64, NO. 12, DECEMBER 2015
receive the information and compare it with their own CCHIs.
The longest CCHI will be chosen to ensure the transmission
of the safety packets and channel reservations. Those platoon
leaders will relay the new CCHI in the network. As a consequence, all the vehicles will adjust their CCHI and SCHI to the
same values in the next synchronous period.
B. Platoon-Based Multipriority Transmission Scheme
In the CA protocol, the WSAI is further divided into several
time slots, and service providers attempt to transmit WSA
packets at the beginning of time slots if the channel is idle.
In our model, it is assumed that different service applications
have different bandwidth transmission requirements. When the
platoon members involved in the platoons want to announce
service information, they first transmit the WSA packets to their
platoon leader, and then, the leader, on behalf of the platoon,
combines the WSA information to a big WSA packet, contends
the CCH, and broadcasts the WSA packet to other vehicles. The
WSA packets delivered by the platoon leader contain the ID
of every service provider, the bandwidth requirements, and the
identities of SCHs to be used of every service application, as
well as other information [9].
Since a platoon always contains many vehicle members,
from the viewpoint of fairness, we consider the WSA packets broadcasted by platoons (WSAP) having higher priority
than the WSA packets delivered by the ordinary vehicles
(WSAO). This multipriority-supported transmission scheme
is different from the same-priority WSA packet transmission
scheme mentioned in the VCI MAC protocol [22]. Moreover, a multipriority Markov model of the WSA packets is
proposed to derive the relationship between the connectivity
probability and the throughput and to get the optimal system
performance of the network according to the dynamic network
connectivity.
C. Multichannel Reservation Coordination Scheme
To reduce the number of packet collisions and increase the
channel utilization on the SCHs, a multichannel reservation
coordination scheme is applied by the proposed MAC protocol
to provide contention-free SCHs.
Vehicles that have received the WSA packets and are interested in the service will respond with ACK packets to the
service providers. Through this interaction, the transmission
channel identities and the transmission duration of the service
data on SCHs will be determined. At the end of the CCHI,
the vehicles that have made successful reservations will tune
to the specific SCHs to perform service transmission. With
the aid of the given multichannel coordination mechanism,
nodes can access SCHs without contention and transmit data
packets continuously in each transmission duration so that the
throughput of SCHs can be significantly increased.
D. Contention-Free ACK Scheme
In the WAVE MAC, vehicles broadcast safety packets to
the surrounding vehicles without RTS/CTS handshake or ac-
Fig. 6. Markov chain model of the WSAP transmission.
knowledgement. In this case, the senders cannot ensure the
successful transmission of the safety packets. Furthermore,
vehicles that are interested in the same service may send several
ACK packets to the same service provider so that serious packet
collisions may happen on the CCH.
In our protocol, vehicles having received the safety packets
or being interested in the service announced by the WSA
packets will respond with ACK packets sequentially during
ACKI. Moreover, different from the ACK scheme in [22], to
avoid duplicate acknowledgements, if the foregoing nodes have
responded to a certain safety packet or service provider, the
latter nodes that received the ACK packet will not repeat the
same response. Moreover, the order of the nodes sending ACK
packets is randomly assigned and sent to the vehicles by the
RSU via the CA packet.
E. Theoretical Analysis
Here, based on the number of vehicles according to the
current connectivity probability, analysis of the multipriority
Markov model, the optimal value of the CCHI and the SCHI
and the corresponding system throughput are presented.
1) Analysis of the Markov Model: From (46), it can be found
that there are M platoons and K ordinary vehicles, which
will transmit WSA packets in the network. Considering that
AIFSN(WSAP) = 2 and AIFSN(WSAO) = 3, the model adopts
the following assumptions: 1) The channels are ideal, and
2) the transmission and collision probabilities are independent.
Let s(i, t), b(i, t), and v(i, t) be the random variables at time
slot t that represent the backoff stage, the value of the backoff
timer, and the active state of the backoff procedure for a packet
of class i(i ∈ 1, 2), respectively. Let Li be the maximum
backoff stage for packets of class i and Wi,m be the contention
window size of the mth backoff stage. We consider that the
backoff procedure is in the freezing state when v(i, t) = 0,
and the backoff counter (BC) remains unchanged. The state
is active and the BC is subtracted by 1 in an idle slot when
v(i, t) = −1. Then, the 3-D process {s(i, t), b(i, t), v(i, t)}
can be modeled as a Markov chain with different
states (i, j, k).
Fig. 6 shows the Markov chain of the WSAP, where v(i, t) =
−1, and the BC is subtracted by 1 in each time slot. Let
SHAO et al.: CONNECTIVITY PROBABILITY AND CONNECTIVITY-AWARE MAC PROTOCOL DESIGN FOR VANETS
5605
2) Optimal Value of the CCHI and the SCHI: It is clear
that the maximum system throughput can be obtained when the
average duration of the idle state E[idle] is equal to the average
duration of the busy state E[coll] in a virtual transmission
procedure on the wireless channel [23]. That is
E[idle] = E[coll] ⇒ pidle ∗ Tidle = pcoll ∗ Tcoll
(50)
where pidle , pcoll , Tidle , and Tcoll denote the probability that
the channel is idle, the probability that a collision occurs, the
duration of an idle slot, and the duration of a collision on the
CCH, respectively. Let pbusy and psucc denote the probability
that the channel is busy and the probability that the packets are
successfully transmitted. Then, we have
⎧
M−1
⎪
∗ (1 − pj )K−1
⎨pidle = (1 − pi )
(51)
psucc = M ∗ pi ∗ (1 − pi )M−1 ∗ (1 − pj )K
⎪
⎩
M
K−1
+K ∗ pj ∗ (1 − pi ) ∗ (1 − pj )
.
Fig. 7. Markov chain model of the WSAO transmission.
p1 denote the collision probability. The one-step transition
probabilities are given by
⎧
p1
⎪
Pr {(j + 1, k, −1)|(j, −1, −1)} = (W1,j+1
⎪
+1) ,
⎪
⎪
⎪
⎪
0 ≤ j ≤ L1 − 1, 0 ≤ k ≤ W1,j+1
⎪
⎪
⎪
⎨Pr {(0, k, −1)|(j, −1, −1)} = (1−p1 ) ,
Let TSAF_pkt , TWSA_pkt , and TSIFS denote the time period
for transmitting a safety packet, transmitting a WSA packet,
and short interframe space (SIFS), respectively. Then, we have
Tcoll = 2 ∗ TWSA_pkt + TSIFS
(52)
Tsucc = TWSA_pkt + TSIFS .
(W1,0 +1)
⎪
0 ≤ j ≤ L1 − 1, 0 ≤ k ≤ W1,0
⎪
⎪
⎪
⎪
⎪Pr {(0, k, −1)|(L1 , −1, −1)} = (W 1 +1) ,
⎪
1,0
⎪
⎪
⎩
0 ≤ j ≤ L1 , 0 ≤ k ≤ W1,0 .
Let T denote the time interval between two consecutive
successful transmissions of WSA packets in WSAI. Then, the
average value of T is given by
(47)
The Markov chain of the WSAO is shown in Fig. 7, where
the backoff procedure will experience the freezing state (j, k, 0)
with unchanged BC and v(i, t) = 0.
Let p2 , p2,idle , and p2,0 be the probability that a WSAO was
not successfully transmitted, and the probabilities that a WSAO
encounters an idle slot or a busy slot, respectively. The one-step
transition probabilities of WSAO are expressed as
⎧
p2
Pr {(j + 1, k, 0)|(j, −1, −1)} = (W2,j+1
⎪
+1) ,
⎪
⎪
⎪
⎪
0 ≤ j ≤ L2 − 1, 0 ≤ k ≤ W2,j+1
⎪
⎪
⎪
⎪
⎪
Pr {(j, k, 0)|(j, k, −1)} = 1 − p2,idle ,
⎪
⎪
⎪
⎨
0 ≤ j ≤ L2 , 0 ≤ k ≤ W2,j−1
(1−p2 )
⎪Pr {(0, k, 0)|(j, −1, −1)} = (W
,
⎪
2,0 +1)
⎪
⎪
⎪
⎪
0 ≤ j ≤ L2 − 1, 0 ≤ k ≤ W2,0
⎪
⎪
⎪
⎪
⎪
Pr
{(0,
k,
−1)|(L
,
−1,
−1)} = (W2,01 +1) ,
2
⎪
⎪
⎩
0 ≤ j ≤ L2 , 0 ≤ k ≤ W2,0 .
(48)
Then, if solving the transition equations shown in (47)
and (48) with the normalization condition of the two Markov
chains, the steady-state transmission probabilities of WSAP and
WSAO can be given by
⎧
L1 +1
⎪
L1 +1 ⎪
1 w1,j 1−p1
⎪
⎨pi = Lj=0
(1−p
1 )+2 1−p1
j
2∗p
1
(49)
L +1
1−p 2
⎪
⎪
pj = L2 w2,j 1
L2 +1 .
⎪
⎩
j (1−p2 )+1−p2
j=0
2∗p
2
E[T ] = Tidle /psucc + pcoll ∗ Tcoll /psucc + Tsucc .
(53)
Let Q and E[serv] denote the number of WSA packets
that successfully reserve the SCH channels and the average
successful transmission duration of a service packet on the
SCHs, respectively. Then, we have
⎧
⎪
⎨TCCHI = TSAFI + TWSAI + TACKI
(54)
TSCHI = Q ∗ E[serv]/6
⎪
⎩
TWSAI = Q ∗ E[T ].
Based on (50)–(54), the optimal length of TWSAI can be
derived, and accordingly, the optimal length of the CCHI
and the SCHI is achieved. As nodes need not to compete to
access the SCHs for the transmission of service packets, the
saturated throughput on SCHs can be calculated. Moreover,
let PWSA_pkt , PService_pkt , and NSCH denote the payload of
the WSA packets, the payload of the service packets, and the
number of SCH channels, respectively. Then, we can get the
throughput of the system SCCH on the CCH during WSAI and
the system throughput SSCH on the SCHs during the SCHI as
SCCH = Q ∗ PWSA_pkt
(55)
SSCH = TSCH /E[serv] ∗ NSCH ∗ PService_pkt .
VI. P ERFORMANCE E VALUATION
Here, the network connectivity probabilities in the platoonbased VANETs are evaluated. To verify the theoretical analysis
5606
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 64, NO. 12, DECEMBER 2015
Fig. 8. Connectivity probability with different numbers of vehicles for the oneway V2V scenario.
Fig. 9. Connectivity probability with different values of L for the one-way V2I
scenario.
on the connectivity probabilities, simulation experiments are
conducted by using MATLAB. The simulation for each scenario is repeated for a sufficiently large number of trials
(Ntotal = 100 000), and the connectivity probability Pc is
obtained from the ratio Nc /Ntotal , where Nc is the number
of trials when the networks are connected. Furthermore, the
performance of the CA MAC protocol is evaluated by both
numerical analysis and simulations via the simulator NS-2.34.
We present the analytical results of the optimal intervals corresponding to the dynamic network condition, as well as the
analytical and simulation results of the system throughput on
the CCH and the SCH.
A. Numerical Results for the One-Way Scenario
1) One-Way V2V Scenario: The connectivity in this scenario
denotes that any pair of vehicles in the VANET can be connected through a multihop path.
Fig. 8 shows the analysis and simulation results of the
connectivity probability with different numbers of ordinary vehicles. It is clear that the analytical results match the simulation
curve well and the connectivity probability increases with the
increase in either the number of platoons or the number of
ordinary vehicles. Moreover, the network will nearly be fully
connected (Pc = 1) when the number of ordinary vehicles is
larger than 80 and when the connectivity probabilities in a
platoon-based VANET are always larger than those in a VANET
without platoons (M = 0).
2) One-Way V2I Scenario: In this scenario, we consider the
connectivity probability as the probability that the vehicles can
access an arbitrary RSU within two hops. The vehicles can
connect with the RSUs directly or through a vehicle under
coverage of the RSU as a relay.
Fig. 9 shows the connectivity probability of the network in terms of distance between two adjacent RSUs,
when R1 = 300 m and R2 = 500 m. It can be found that
the connectivity probability will decrease when distance L
increases. The connectivity probability is higher in platoon-
Fig. 10. Connectivity probability with different traffic densities for the twoway V2V scenario.
based networks compared with that in networks without
platoons.
B. Numerical Results for the Two-Way Scenario
1) Two-Way V2V Scenario: In this scenario, if the
connectivity of the two successive vehicles on the one-way road
is broken, the broken link can be connected if there are vehicles
located in their coverage gap and connected with each other on
the opposite road. Since the VANET is dynamic, many data forwarding steps will cause large delay and unreliability in the networks. For simplicity, we consider the situation when F = 1,
which means that there is one vehicle located in the coverage
gap of the two broken vehicles and can connect with them.
When F = 1, VC and VD shown in Fig. 3 can be seen as
one vehicle VC . If VC can connect VA on the left side while
connecting VB on the right side, then we can consider the
link between VA and VB as connected. Fig. 10 shows the
SHAO et al.: CONNECTIVITY PROBABILITY AND CONNECTIVITY-AWARE MAC PROTOCOL DESIGN FOR VANETS
Fig. 11. Connectivity probability with different values of L for the two-way
V2I scenario.
5607
Fig. 12. Optimal channel intervals (M = 10).
TABLE I
S IMULATION PARAMETERS
analysis and simulation results of the connectivity probability
in the one-way V2V scenario and the two-way V2V scenario,
respectively. It is clear that the connectivity probability is higher
in the two-way communication scenario than in the one-way
communication scenario. Similarly, when there are platoons in
the two-way V2V communication scenario, the connectivity
probability will be improved.
2) Two-Way V2I Scenario: In this scenario, we consider the
connection between the vehicles with the RSUs within two
hops. Fig. 11 shows the connectivity probability for the twoway V2I communication scenario in terms of distance between
two adjacent RSUs, when R1 = 300 m and R2 = 500 m. The
connectivity probability decreases when distance L increases.
Simulation and analysis results show that the connectivity probability for the two-way V2I scenario is higher than that for the
one-way V2I scenario. Moreover, the connectivity probabilities
are higher in the platoon-based VANETs compared with those
in networks without platoons.
C. Performance Evaluation of the MAC Protocol
The performance of the CA MAC protocol is evaluated
by both analytical results and simulations. Table I lists the
system parameters used in both the theoretical analysis and the
simulations.
Fig. 13. Throughput on the CCH during the WSAI.
Fig. 12 shows the optimal intervals in terms of different
numbers of vehicles corresponding to the connectivity probability shown in Fig. 8. It can be found that our proposed MAC
protocol can provide sufficient transmission opportunities for
safety packets by providing larger SAFI, ACKI, and CCHI as
the number of vehicles increases. Moreover, the WSAI and the
SCHI decrease with the increase in the number of vehicles,
which means that the intervals for service reservations on the
CCH and service packet transmissions on the SCHs decrease to
ensure the sufficient transmission time for safety information.
Therefore, under different traffic loads of the network, the
proposed MAC protocol is able to adjust the channel intervals
to provide the proper bandwidth.
Fig. 13 shows the system throughput on the CCH during
the WSAI in terms of different numbers of ordinary vehicles.
Although there is a small deviation between the simulation
result and the analytical result since the channels are fading,
collisions may happen among two and three or more nodes,
5608
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 64, NO. 12, DECEMBER 2015
Fig. 14. Throughput on the SCHs during the SCHI.
and the transmission probability and the collision probability
affect each other during the simulation process, it is clear that
the simulation results almost match the analytical results. When
the number of ordinary vehicles increases, the connectivity
probability will increase, as shown in Fig. 8. Accordingly, the
throughput increases with the connectivity probability. However, when the number of ordinary vehicles is larger than 60, the
throughput will decrease, whereas the connectivity probability
increases. This is because the channel contention is aggravated
by numerous nodes.
The system throughput on the SCHs during the SCHI with
different numbers of vehicles is shown in Fig. 14. It can be
found that similar to the throughput change on the CCH during
the WSAI, the system throughput first increases when the
connectivity probability of the network increases, in spite of
the decreasing TSCHI , as shown in Fig. 12. Then, the throughput decreases when the number of vehicles further increases.
Furthermore, when there are more platoons in the network, the
throughput will be improved since the connectivity probability
of the network increases.
Moreover, we compare the proposed CA MAC protocol with
the VCI MAC protocol [22] and the WAVE MAC scheme. It
can be found that our proposed MAC outperforms the VCI
MAC protocol in terms of throughput on SCHs, since more
successful service reservations can be made due to fewer channel collisions on the CCH offered by the contention-free ACK
scheme. Furthermore, the maximum system throughput theory
[23] adopted in our paper can improve the WSA packet transmission, which can also increase the successful reservations and
the throughput on SCHs. Meanwhile, compared with the typical
WAVE MAC scheme, the CA MAC can significantly improve
the system throughput on the SCHs since the multichannel
reservation coordination scheme can provide contentionfree SCHs.
VII. C ONCLUSION
In this paper, the connectivity probabilities for V2V and V2I
communication scenarios in one-way and two-way platoon-
based VANETs have been investigated with respect to some
important system parameters, such as the traffic density, the
coverage of the vehicles, the coverage of the RSU, the distance between two adjacent RSUs, and the platoon ratio in
the VANETs. A CA MAC protocol is designed for platoonbased VANETs. Based on a Markov analytical model, the
performance of the CA MAC protocol is evaluated in terms of
connectivity probability and system throughput. The proposed
MAC protocol is enhanced with a multichannel reservation
scheme that can dynamically adjust the CCHI and the SCHI
for the improvement of the system throughput. Both theoretical
analysis and simulation results indicate that the system throughput increases with the connectivity probability. However, when
the connectivity probability further increases, the throughput
will decrease due to numerous channel contentions. Moreover,
simulation results show that compared with the VCI MAC
protocol and the WAVE MAC scheme, the CA MAC protocol
can improve the system throughput on SCHs due to the effective
avoidance of transmission collisions in VANETs.
R EFERENCES
[1] Y. Ren, J. Shen, J. Wang, J. Han, and S. Lee, “Mutual verifiable provable
data auditing in public cloud storage,” J. Internet Technol., vol. 16, no. 2,
pp. 317–323, Mar. 2015.
[2] Z. Xia, X. Wang, X. Sun, and Q. Wang, “A secure and dynamic
multi-keyword ranked search scheme over encrypted cloud data,” IEEE
Trans. Parallel Distrib. Syst., to be published, DOI:10.1109/TPDS.2015.
2401003.
[3] Z. Fu, X. Sun, Q. Liu, L. Zhou, and J. Shu, “Achieving efficient cloud
search services: Multi-keyword ranked search over encrypted cloud data
supporting parallel computing,” IEICE Trans. Commun., vol. E98-B,
no. 1, pp. 190–200, 2015.
[4] N. P. Chandrasekharamenon and B. Ancharev, “Connectivity analysis
of one-dimensional vehicular ad hoc networks in fading channels,”
EURASIP J. Wireless Commun. Netw., vol. 2012, no. 1, p. 1, Jan. 2012.
[5] S. C. Ng, W. Zhang, Y. Yang, and G. Mao, “Analysis of access and
connectivity in infrastructure-based vehicular relay networks,” in Proc.
IEEE Wireless Commun. Netw. Conf., 2010, pp. 1–6.
[6] P. Guo, J. Wang, B. Li, and S. Lee, “A variable threshold-value authentication architecture for wireless mesh networks,” J. Internet Technol.,
vol. 15, no. 6, pp. 929–936, Nov. 2014.
[7] S. Xie and Y. Wang, “Construction of tree network with limited delivery latency in homogeneous wireless sensor networks,” Wireless Pers.
Commun., vol. 78, no. 1, pp. 231–246, Sep. 2014.
[8] IEEE Standard for Information Technology-Telecommunications and
Information Exchange Between Systems-Local and Metropolitan Area
Networks—Specific Requirements Part 11: Wireless LAN Medium Access
Control (MAC) and Physical Layer (PHY) Specifications Amendment 6:
Wireless Access in Vehicular Environments, IEEE Std. 802.11p, 2010.
[9] IEEE Standard for Wireless Access in Vehicular Environments (WAVE)Multi-Channel Operation, IEEE Std. 1609.4, Sep. 2010.
[10] S. Leng, H. Fu, Q. Wang, and Y. Zhang, “Medium access control in
vehicular ad hoc networks,” Wireless Commun. Mobile Comput., vol. 11,
no. 7, pp. 796–812, Jul. 2011.
[11] S. Yousefi, E. Altman, R. El-Azouzi, and M. Fathy, “Analytical model for
connectivity in vehicular ad hoc networks,” IEEE Trans. Veh. Technol.,
vol. 57, no. 6, pp. 3341–3356, Nov. 2008.
[12] C. Bergenhem, E. Hedin, and D. Skarin, “Vehicle-to-vehicle communication for a platooning system,” Procedia–Social Behav. Sci., vol. 48,
pp. 1222–1233, 2012.
[13] G. H. Mohimani, F. Ashtiani, A. Javanmard, and M. Hamdi, “Mobility
modeling, spatial traffic distribution, and probability of connectivity for
sparse and dense vehicular ad hoc networks,” IEEE Trans. Veh. Technol.,
vol. 58, no. 4, pp. 1998–2007, May 2009.
[14] S. Panichpapiboon and W. Pattara-atikom, “Connectivity requirements for
self-organizing traffic information systems,” IEEE Trans. Veh. Technol.,
vol. 57, no. 6, pp. 3333–3340, Nov. 2008.
[15] A. Abdrabou and W. Zhuang, “Probabilistic delay control and road
side unit placement for vehicular ad hoc networks with disrupted
SHAO et al.: CONNECTIVITY PROBABILITY AND CONNECTIVITY-AWARE MAC PROTOCOL DESIGN FOR VANETS
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
connectivity,” IEEE J. Sel. Areas Commun., vol. 29, no. 1, pp. 129–139,
Jan. 2011.
W. Jin and W. W. Recker, “An analytical model of multihop connectivity of inter-vehicle communication systems,” IEEE Trans. Wireless
Commun., vol. 9, no. 1, pp. 106–112, Jan. 2010.
R. Hall and C. Chin, “Vehicle sorting for platoon formation: Impacts
on highway entry and throughput,” Transp. Res. C, Emerging Technol.,
vol. 12, no. 5/6, pp. 405–420, Oct.–Dec. 2005.
D. Jia, K. Lu, and J. Wang, “A disturbance-adaptive design for VANETenabled vehicle platoon,” IEEE Trans. Veh. Technol., vol. 63, no. 2,
pp. 527–539, Feb. 2014.
N. Lyamin, A. Vinel, M. Jonsson, and J. Loo, “Real-time detection of
denial-of-service attacks in IEEE 802.11p vehicular networks,” IEEE
Commun. Lett., vol. 18, no. 1, pp. 527–539, Jan. 2014.
Y. Zhang, G. Cao, and J. Wang, “V-PADA: Vehicle-platoon-aware
data access in VANETs,” IEEE Trans. Veh. Technol., vol. 60, no. 5,
pp. 2326–2339, Jun. 2011.
D. Jia et al., “Improving the uplink performance of drive-thru Internet
via platoon-based cooperative retransmission,” IEEE Trans. Veh. Technol.,
vol. 63, no. 9, pp. 4536–4545, Nov. 2014.
Q. Wang, S. Leng, H. Fu, and Y. Zhang, “An IEEE 802.11p-based multichannel MAC scheme with channel coordination for vehicular ad hoc
networks,” IEEE Trans. Intell. Transp. Syst., vol. 13, no. 2, pp. 449–458,
Jun. 2012.
J. Mao, Y. Mao, S. Leng, and X. Bai, “Performance optimization for
IEEE 802.11 with QoS differentiation supporting,” J. Softw., vol. 21,
no. 11, pp. 2866–2882, 2010.
Caixing Shao received the B.Eng. degree from
Southwest University, Chongqing, China, in 2006.
She is currently working toward the Ph.D. degree
with the University of Electronic Science and Technology of China, Chengdu, China. From 2013 to
2014, she was a joint Ph.D. student with the Simula
Research Laboratory, Fornebu, Norway.
She is currently a Lecturer with the College of
Computer Science and Technology, Southwest University for Nationalities, Chengdu. Her research interest includes vehicular ad hoc networks.
Supeng Leng (M’06) received the Ph.D. degree
from Nanyang Technological University (NTU),
Singapore.
He is a Professor with the School of Communication and Information Engineering, University
of Electronic Science and Technology of China,
Chengdu, China. He has been a Research Fellow
with the Network Technology Research Center,
NTU. He has published over 100 research papers.
His research interests include resource, spectrum, energy, routing and networking in broadband wireless
access networks, vehicular networks, Internet of things, next-generation mobile
networks, and smart grids.
Dr. Leng serves as an Organizing Committee Chair and a Technical Program
Committee Member for many international conferences, as well as a Reviewer
for more than ten international research journals.
5609
Yan Zhang (M’05–SM’10) received the Ph.D. degree from the School of Electrical and Electronics Engineering, Nanyang Technological University,
Singapore.
He is currently the Head of Department with the
Department of Networks, Simula Research Laboratory, Fornebu, Norway, and an Adjunct Associate
Professor with the Department of Informatics, University of Oslo, Oslo, Norway. His current research
interests include wireless networks and reliable and
secure cyberphysical systems (e.g., healthcare, transport, and smart grids).
Dr. Zhang is an Associate Editor, as well as being on the Editorial Boards,
of a number of well-established scientific international journals, e.g., Wiley
Wireless Communications and Mobile Computing. He also serves as a Guest
Editor for the IEEE T RANSACTIONS ON I NDUSTRIAL I NFORMATICS , IEEE
C OMMUNICATIONS M AGAZINE, IEEE W IRELESS C OMMUNICATIONS, and
the IEEE T RANSACTIONS ON D EPENDABLE AND S ECURE C OMPUTING. He
serves as a Chair or a TPC member for numerous international conferences.
He has received seven Best Paper Awards. He is a Senior Member of the IEEE
Communications and Vehicular Technology Societies.
Alexey Vinel (M’07–SM’12) received the Bachelor’s (Hons.) and Master’s (Hons.) degrees in
information systems from the Saint Petersburg
State University of Aerospace Instrumentation, Saint
Petersburg, Russia, in 2003 and 2005, respectively,
and the Ph.D. degrees in technology from the
Institute for Information Transmission Problems,
Moscow, Russia, in 2007 and Tampere University of
Technology, Tampere, Finland, in 2013.
He is currently a Professor of data communications with the School of Information Technology,
Halmstad University, Halmstad, Sweden. He has been involved in research
projects on vehicular networking standards, advanced driver-assistance systems, and autonomous driving.
Dr. Vinel has been an Associate Editor for the IEEE C OMMUNICATIONS
L ETTERS since 2012.
Magnus Jonsson (SM’07) received the B.S. and
M.S. degrees from Halmstad University, Halmstad,
Sweden, in 1993 and 1994, respectively, and the
Licentiate of Technology and Ph.D. degrees from
Chalmers University of Technology, Gothenburg,
Sweden, in 1997 and 1999, respectively, all in computer engineering.
Since 2003, he has been a Full Professor of realtime computer systems with Halmstad University,
where he is also the Vice Dean and the Director of
Research with the School of Information Technology
(ITE). From 1998 to March 2003, he was an Associate Professor of data
communication with Halmstad University (acting between 1998 and 2000). He
has published close to 120 scientific papers and book chapters, most of them
in the areas of vehicular communication, real-time communication, wireless
networking, real-time and embedded computer systems, optical networking,
and optical interconnection architectures.