MAC Layer Service Time Distribution of a
advertisement

International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
MAC Layer Service Time Distribution of a
Fixed Priority Real Time Scheduler over 802.11
Inès El Korbi
Ecole Nationale des Sciences de l’Informatique
Laboratoire Cristal
Université de la Manouba, 2010 Tunisia
ines.korbi@gmail.com
Leila Azouz Saidane
Ecole Nationale des Sciences de l’Informatique
Laboratoire Cristal
Université de la Manouba, 2010 Tunisia
leila.saidane@ensi.rnu.tn
Abstract
In this paper, we propose to support a fixed priority real time scheduler over 802.11
protocol called Deadline Monotonic (DM). We evaluate the performances of this policy for a
simple scenario where two stations with different delay constraints contend for the channel.
For this scenario a Markov chain based analytical model is proposed. From the
mathematical model, we derive the probability distribution of the packet service time at MAC
layer. Analytical results are validated by simulation using the ns-2 network simulator.
1. Introduction
The IEEE 802.11 wireless LANs [2] become more and more reliable to support
applications with Quality of Service (QoS) requirements. Indeed, the IEEE 802.11e standard
[3] was recently proposed to offer service differentiation over 802.11.
The IEEE 802.11e standard proposes the Enhanced Distributed Channel Access (EDCA)
as an extension for the 802.11 Distributed Coordination Function (DCF). With EDCA, each
station maintains four priorities called Access Categories (ACs). Each access category is
characterized by a minimum and a maximum contention window sizes and an Arbitration
Inter Frame Space (AIFS).
Even though the IEEE 802.11e protocol introduces service differentiation over 802.11, the
granularity of service offered by 802.11e (4 priorities at most) can not satisfy the real time
flows requirements (each flow is characterized by its own delay bound). Therefore, we
propose in this paper a new medium access mechanism based on the fixed priority Deadline
Monotonic (DM) policy [8] to schedule real time flows over 802.11.
To support the DM policy over 802.11, we use a distributed scheduling and introduce a
new medium access backoff policy. We then propose a Markov chain based analytical model
to evaluate the performances of DM for a simple scenario where two stations with different
deadline constraints contend for the channel. This configuration will reflect the behavior of
DM over 802.11 and the mathematical model can be extended for more complex scenarios.
95
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
For the considered configuration, we evaluate for each station the MAC layer service time
distribution. We can therefore derive the probability that the packet service time exceeds a
certain value. Analytical results will be validated and extended by simulation using the ns-2
network simulator [9].
The rest of this paper is organized as follows. In section 2, we review the works related to
our study. In section 3, we present the distributed scheduling and introduce the new medium
access backoff policy to support DM over 802.11. In section 4, we present the mathematical
model based on the Markov chains analysis. In section 5, we evaluate the service time
distribution and present analytical and simulation results. Finally, we conclude the paper in
section 6.
2. Related Works
In the absence of a coordination point, the IEEE 802.11 defines the Distributed
Coordination Function (DCF) based on the Carrier Sense Multiple Access with Collision
Avoidance (CSMA/CA) protocol. In the DCF protocol, a station shall ensure that the channel
is idle when it attempts to transmit. Then it selects a random backoff in the contention
window [0 , CW − 1] , where CW is the current window size and takes its values between the
minimum and the maximum contention window sizes. If the channel is sensed busy, the
station suspends its backoff until the channel becomes idle for a Distributed Inter Frame
Space (DIFS) after a successful transmission or an Extended Inter Frame Space (EIFS) after a
collision. When the backoff reaches 0, the packet is transmitted. A packet is dropped if it
collides after maximum retransmission attempts.
Different works have been proposed to evaluate the performance of the 802.11 DCF.
Indeed, Bianchi [1] proposed a Markov chain based analytical model to evaluate the
saturation throughput of the 802.11 protocol. Probabilistic bounds on MAC layer service time
were derived in [10]. The IEEE 802.11e performs service differentiation over 802.11 and
aggregates the traffic into four access categories. In [4] and [5] Osterbo and Al. proposed to
evaluate the performance of EDCA under saturated and non saturated conditions.
Although the IEEE 802.11e EDCA classifies the traffic into four prioritized ACs, there is
still no guarantee of real time transmission service. This is due to the lack of a satisfactory
scheduling method for various delay-sensitive flows.
In this paper, we focus on delay sensitive flows and propose to support the fixed priority
Deadline Monotonic (DM) policy over 802.11 to schedule delay sensitive flows. For instance,
we use a priority broadcast mechanism similar to [6] and introduce a new medium access
backoff policy where the backoff value is inferred from the deadline information.
3. Supporting Deadline Monotonic Policy over 802.11
The Deadline Monotonic policy (DM) [8] is a real time scheduling policy that assigns
static priorities to flows packets according to their deadlines; the packet with the small
deadline being assigned the highest priority. Indeed, when flows packets arrive to a station,
they are sorted by increasing order of their deadlines such as the Head of Line (HOL) packet
has the shortest delay bound. The problem that occurs with the DCF is that all the stations
share the same transmission medium and the HOL packets of all the stations will contend for
the channel with the same priority even if they have different deadlines.
96
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
The idea of introducing DM over 802.11 is to allow stations having packets with short
deadlines to access the channel with higher priority than those having packets with long
deadlines. Providing such a QoS requires a distributed scheduling and a new medium access
policy.
3.1. Distributed Scheduling
To realize a distributed scheduling over 802.11, we introduce a broadcast priority
mechanism similar to [6]. In each station, we focus on two packets:
−
The current packet: the packet being served.
−
The HOL packet: the packet at the head of the queue that will be transmitted after
the service completion of the current packet.
Each station maintains a local scheduling table with entries for HOL packets of all other
stations. Each entry in the scheduling table of node S i comprises two fields (S k , Dk ) where
S k is the source node MAC address (Address 2 field in DATA packet and RA field in the
ACK packet) and Dk is the deadline of station S k HOL packet. To broadcast the HOL packet
deadlines, we propose to use the DATA/ACK access mode. The deadline information
requires two additional bytes to be encoded in DATA and ACK packets.
When a node S i transmits a DATA packet, it piggybacks the deadline of its HOL packet.
The nodes hearing the DATA packet add an entry for S i in their local scheduling tables by
filling the corresponding fields. The receiver of the DATA packet copies the priority of the
HOL packet in ACK before sending the ACK frame. All the stations that did not hear the
DATA packet add an entry for S i using the information in the ACK packet.
In the following, we propose a new medium access policy, where the backoff value is
inferred from the packet deadline.
3.2. DM medium access backoff policy
Let’s consider two stations S 1 and S 2 transmitting two flows with the same deadline D1
( D1 is expressed as a number of 802.11 slots). The two stations having the same delay
bounds can access the channel with the same priority using the native 802.11 DCF. Now, we
suppose that S 1 and S 2 transmit flows with different delay bounds D1 and D2 such as
D1 < D2 and generate two packets at time instants t 1 and t 2 . If S 2 had the same delay bound
as S 1 , its packet would have been generated at time t' 2 such as t' 2 = t 2 + D21 , where
D21 = (D2 − D1 ) . At that time S 1 and S 2 would have the same priority and transmit their
packets according to the 802.11 protocol.
Hence, when S 2 has a packet to transmit, it selects a 802.11 backoff, but suspends this
backoff during D21 idle slots. The D21 slots elapsed, 802.11 backoff can therefore be
decremented.
Thus to support DM over 802.11, each station uses a new backoff policy where the backoff
is given by:
•
The random backoff selected in [0 , CW − 1] , according to 802.11 DCF, called
BAsic Backoff (BAB).
•
The DM Shifting Backoff (DMSB): corresponds to the additional backoff slots that
a station with low priority (transmitting a packet with a large deadline) adds to its
97
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
BAB to have the same priority as the station with the highest priority (transmitting
the packet with the shortest deadline).
Whenever a station S i sends an ACK or hears an ACK on the channel its DMSB is
reevaluated as follows:
DMSB (S i ) = Deadline(HOL(S i ) − DTmin (S i ))
(1)
where DTmin (S i ) is the minimum of the HOL packet deadlines present in S i scheduling
table and Deadline(HOL (S i )) is station S i HOL packet deadline.
Hence, when S i has to transmit its HOL packet with a delay bound Di , it selects a BAB in
the contention window [0 , CW min − 1] and computes the Whole Backoff (WHB) value as
follows:
WHB(S i ) = DMSB(S i ) + BAB(S i )
(2)
The station S i decrements its WHB when it senses an idle slot. Now, we suppose that S i
senses the channel busy. If a successful transmission is heard, then S i revaluates its DMSB
when a correct ACK is heard. Then, S i adds the new DMSB value to its current BAB as in
equation (2). Whereas, if a collision is heard, S i reinitializes its DMSB and adds it to its
current BAB to allow colliding stations contending with the same priority as for their first
transmission attempt. S i transmits when its WHB reaches 0.
4. Mathematical Model of the DM policy over 802.11
In the hereby section, we propose a mathematical model to evaluate the performance of the
DM policy using Markov chains analysis [1]. We consider the following assumptions:
1) The system under study comprises two stations S 1 and S 2 , such as S i transmits a
flow Fi having a deadline Di and D1 < D2 . We define D21 = (D2 − D1 ) as the
difference between the two delay bounds.
2) We operate in saturation conditions: each station has immediately a packet
available for transmission after the service completion of the previous packet [1].
3) A station selects a BAB in a contention window [0 ,W − 1] . We consider that each
station selects a 802.11 backoff in the same contention window of size W
independently of the transmission attempt. This is a simplifying assumption to
limit the complexity of the mathematical model.
4) We suppose that we are in stationary conditions, i.e. the two stations have already
sent one packet to each other. Thus, the two stations have the same scheduling
table.
Each station S i will be modeled by a Markov chain representing the whole backoff
(WHB) process.
98
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
4.1 Markov chain modeling station S1
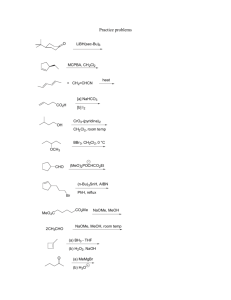
Figure 1 represents the Markov chain modeling station S 1 .
Figure 1: Markov chain modeling station S 1
The states of this Markov chain are described by the following quadruplet (R ,i ,i − j ,− D21 )
where:
•
R : takes two values ~ S 2 and S 2 . When R = ~ S 2 , station S 2 is decrementing its
shifting backoff (DMSB) during D21 slots and wouldn’t contend for the channel.
When R = S 2 , the D21 slots were elapsed and S 2 will contend for the channel at
the same time as S 1 .
•
i : the value of the BAB selected by S 1 in [0 ,W − 1] .
•
(i − j ) : corresponds to the remaining backoff slots before reaching 0.
D21 : corresponds to (D2 − D1 ) . We choose the negative notation − D 21
•
to express the fact that S 2
and DMSB(S 1 ) = 0 .
for S 1
has a positive ∆ΜΣΒ equals to D21
Initially S 1 selects a random BAB and is in one of the states (~ S 2 , i , i ,− D21 ) , i = 0..W − 1 .
During (D21 − 1) slots, S 1 decrements its backoff with the probability 1 and moves to one of
the states (~ S 2 , i , i − j ,− D21 ) , i = 0..W − 1 , j = min(max (0 , i − 1), D21 − 1) . Indeed during
these slots, S 2 is decrementing its DMSB and wouldn’t contend for the channel. When S 1
th
decrements its D21
slot it knows that henceforth, S 2 can contend for the channel (the D21
slots were elapsed). Hence, S 1 moves to one of the states (S 2 , i , i − D21 ,− D21 ) ,
i = D21 ..W − 1 . If the BAB initially selected by S 1 is smaller than D21 , then S 1 transmits
when its backoff reaches 0. If S 2 transmits before S 1 backoff reaches 0, the next packet of
S 2 will decrement another DMSB and S 1 will see the channel free again for D21 slots.
99
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
4.2 Markov chain modeling station S2
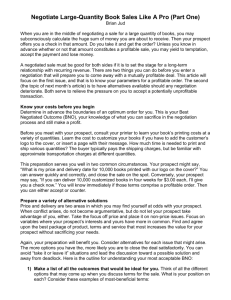
Figure 2 represents the Markov chain modeling station S 2 .
Figure 2: Markov chain modeling station S 2
Each state of S 2 Markov chain is represented by the quadruplet (i , k , D21 − j , D21 ) where:
•
i : refers to the BAB value selected by S 2 in [0 ,W − 1] .
•
k : refers to the current BAB value.
•
D21 − j : refers to the current DMSB of S 2 , j in [0 , D 21 ] .
•
D21 : corresponds to (D2 − D1 ) .
When S 2 selects a BAB, its DMSB equals D21 and is in one of states (i , i , D21 , D21 ) ,
i = 0..W − 1 . If S 2 observes the channel idle during D21 slots, it moves to one of the states
(i ,i ,0 , D21 ) , i = 0..W − 1 , where it ends its shifting backoff. At that time, S 2 begins
decrementing its basic backoff. If S 1 transmits from the state (i , i ,0 , D21 ) , S 2 reinitializes its
shifting backoff and moves again to one of the states (i , i , D21 , D21 ) , i = 1..W − 1 .
4.3. Blocking probabilities in the Markov chains
We notice from figure 1 that when S 1 is in one of the states (~ S 2 , i , i − j ,− D 21 ) ,
i = 0..W − 1 , j = min(max (0 , i − 1), D21 − 1) , it decrements its backoff with the probability
1.
That means that when S 1 is in one of these states (~ S 2 , i , i − j ,− D21 ) , it knows that S 2 is
decrementing its DMSB and is in one of the states (i , i , D 21 − j , D21 ) , i = 0..W − 1 ,
j = 0..(D21 − 1) .
However, when S 1 is in one of the states (S 2 , i , i − D 21 ,− D21 ) , i = D21 ..(W − 1) , S 2 has
already decremented its DMSB and can now contend for the channel by decrementing its
basic
backoff.
In
this
case,
will
be
in one
of the states
S2
(i ,i ,0 , D21 )i =0..W −1 ∪ (i ,i − 1,0 , D21 )i =2..W −1 .
From the explanations above, each station Markov chain states can be divided in two
groups:
100
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
−
ξ 1 : the set of states of S 1 for which S 2 will not contend (blue states in figure 1).
ξ 1 = {(~ S 2 ,i ,i − j ,− D21 ),i = 0..W − 1, j = 0.. min(max(0 ,i − 1), D21 − 1)}
−
γ 1 : the set of states of station S 1 for which S 2 can con contend and decrements
its BAB (pink states in figure 1).
γ 1 = {(S 2 , i , i − D 21 ,− D 21 ), i = D21 ..W − 1}
−
ξ 2 : the set of states of S 2 where S 2 does not contend for the channel (blue states
in figure 2).
ξ 2 = {(i ,i , D21 − j , D 21 ), i = 0..W − 1, j = 0..(D21 − 1)}
−
γ 2 : the set of states of S 2 , where S 2 contends for the channel (pink states in figure
2).
γ 2 = {(i , i ,0 , D21 ),i = 0..W − 1 ∪ (i ,i − 1,0 , D21 ), i = 2..W − 1}
Thus when S 1 is in one of the states of ξ 1 , S 2 is obligatory in of the states of ξ 2 .
Similarly, when S 1 is in one of the states of γ 1 , S 2 is obligatory in of the states of γ 2 .
When the station S 2 is in one states of ξ 2 , S 2 is blocked with the probability τ 11 , this
probability corresponds to the probability that S 1 transmits given that it is in one of the states
of ξ 1 . Thus:
[
τ 11 = Pr S 1 transmits ξ 1
]
π 1(~ S2 ,0 ,0 ,− D21 )
=
W −1 min ( max (0 ,i −1),D21 −1 )
(~ S 2 ,i ,i − j ,− D21 )
1
i =0
j =0
∑
(3)
∑π
Where π 1( R ,i ,i − j ,− D21 ) is the probability that S 1 is in the state (R , i , i − j ,− D 21 ), in the
stationary conditions and Π 1 = π 1( R ,i ,i − j ,− D21 ) is the probability vector of S 1 . We also
define τ 12 , the probability that S 2 is blocked given that station S 1 is in one of the states
of γ 1 . Hence:
{
}
[
τ 12 = Pr S 1 transmits γ 1
]
=
π 1(S 2 ,D21 ,0 ,− D21 )
W −1
∑π
(4)
( S 2 ,i ,i − D21 ,− D21 )
1
i = D21
In the same way, when S 2 is in one of the states of ξ 2 , S 1 will decrement its backoff with
the probability 1. Indeed, no one of the ξ 2 states corresponds to a transmission state (those
states describe the shifting backoff decremented by S 2 ). However, when S 2 is in one of the
states of γ 2 , it contends for the channel and S 1 is blocked with the probability τ 22 , such as:
[
τ 22 = Pr S 2 transmits γ 2
]
=
π 2(0 ,0 ,0 ,D21 )
W −1
∑π
i =0
(i ,i ,0 ,D21 )
2
W −1
+
∑π
(5)
(i ,i −1,0 ,D21 )
2
i =2
where π 2(i ,k ,D21 − j ,D21 ) is defined as the probability of the state (i , k , D21 − j , D21 ), in the
stationary condition. Π 2 = π 2(i ,k ,D21 − j ,D21 ) is the probability vector of S 2 .
{
}
101
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
The blocking probabilities described above allow deducing the transition state probabilities
and having the transition probability matrix Pi , for each station S i . Therefore, we can
evaluate the state probabilities by solving the following system [7]:
Π i Pi = Π i
π ij = 1
j
∑
(6)
4.4. Transition probability matrix of S1
Let P1 be the transition probability matrix of S 1 and P1 {i , j} is the probability to transit
from state i to state j . The transitions probabilities of station S 1 are:
P1 {(~ S 2 ,i ,i − j ,− D21 ), (~ S 2 ,i ,i − ( j + 1),− D21 )} = 1,i = 2..W − 1,
j = 0.. min(i − 2 , D21 − 2 )
P1 {(~ S 2 , i , i − D 21 + 1,− D 21 ), (S 2 , i , i − D21 ,− D21 )} = 1,
i = D 21 ..(W − 1)
P1 {(~ S 2 ,i ,1,− D21 ), (~ S 2 ,0 ,0 ,− D21 )} = 1, i = 1..(W − 1, D21 − 1)
P1 {(S 2 , i , i − D21 ,− D21 ), (S 2 , (i − 1), (i − 1 − D21 ),− D 21 )} = 1 − τ 22 ,
i = (D 21 + 1)..W − 1
P1 {(S 2 ,i ,i − D21 ,− D21 ), (~ S 2 , (i − D21 ), (i − D21 ),− D21 )} = τ 22 ,
i = (D21 + 1)..W − 1
P1 {(~ S 2 ,0 ,0 ,− D21 ), (~ S 2 ,i ,i ,− D21 )} =
(7)
(8)
(9)
(10)
(11)
1
,i = 0..W − 1
W
(12)
1
, i = 0..W − 1
W
(13)
If (D21 < W ) then:
P1 {(S 2 , D21 ,0 ,− D21 ), (~ S 2 , i , i ,− D21 )} =
By replacing P1 and Π 1 in (6) and solving the resulting system, we can express
π 1( R ,i ,i − j ,− D21 ) as a function of τ 22 , where τ 22 is given by (5).
4.5. Transition probability matrix of S2
Let P2 be the transition probability matrix of S 2 . The transitions probabilities of S 2 are:
P2 {(i , i , D21 − j , D21 ), (i , i , D21 − ( j + 1), D21 )} = 1 − τ 11 ,
i = 0..W − 1, j = 0..(D21 − 1)
P2 {(i , i , D 21 − j , D21 ), (i , i , D21 , D21 )} = τ 11 , i = 0..W − 1, j = 0..(D21 − 1)
P2 {(i , i ,0 , D21 ), (i , i − 1,0 , D21 )} = 1 − τ 12 , i = 2..W − 1
P2 {(1,1,0 , D 21 ), (0 ,0 ,0 , D21 )} = 1 − τ 12
P2 {(i , i ,0 , D21 ), (i , i , D 21 , D21 )} = τ 12 , i = 1..W − 1
P2 {(i , i − 1,0 , D21 ), (i − 1, i − 1, D 21 , D21 )} = τ 12 , i = 2..W − 1
102
(14)
(15)
(16)
(17)
(18)
(19)
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
P2 {(i , i − 1,0 , D 21 ), (i − 1, i − 2 ,0 , D21 )} = 1 − τ 12 , i = 3..W − 1
1
, i = 0..W − 1
P2 {(0 ,0 ,0 , D 21 ), (i , i , D 21 , D 21 )} =
W
(20)
(21)
By replacing P2 and Π 2 in (6) and solving the resulting system, we can express
π 2(i ,k ,D21 − j ,D21 ) as a function of τ 11 , τ 12 given respectively by equations (3), (4). Moreover, by
replacing π 1( R ,i ,i − j ,− D21 ) and π 2(i ,k ,D21 − j ,D21 ) by their values, in equations (3), (4) and (5), we
obtain a system of non linear equations as follows:
τ 11 = f (τ 22 )
τ 12 = f (τ 22 )
τ 22 = f (τ 11 ,τ 12 )
under the constraint
τ 11 > 0 ,τ 12 > 0 ,τ 22 > 0 ,τ 11 < 1,τ 12 < 1,τ 22 < 1
(22)
Solving the above system (22), allows deducing the expressions of τ 11 , τ 12 and τ 22 , and
deriving the state probabilities of S 1 and S 2 Markov chains.
5. Service Time Analysis
In this section, we evaluate the MAC layer service time distribution of S 1 and S 2 , using
the DM policy. The MAC layer service time is the time interval from the time instant that a
packet becomes at the head of the queue and starts to contend for channel to the time instant
that either the packet is acknowledged for a successful transmission or dropped. We propose
to evaluate the Z-Transform of the MAC layer service time [10] to derive expressions of the
service time distributions. The service time depends on the duration of an idle slot Te , the
duration of a successful transmission Ts and the duration of a collision Tc [4], [10].
We have:
(
= (T
)
) + EIFS
Ts = TPHY + TMAC + T p + TD + SIFS + (TPHY + T ACK + TD ) + DIFS
Tc
PHY
+ TMAC + T p + TD
(23)
(24)
where TPHY , TMAC and TACK are the durations of the PHY header, the MAC header and the
ACK packet. TD is the time required to transmit the two bytes deadline information and T p is
the time required to transmit the data payload. Stations hearing a collision wait during EIFS
before resuming their packets.
Tevent
.
Te
As Te is the smallest duration event, the duration of all events will be given by
5.1. Z-transform of station S1 service time
To evaluate the Z-transform of station S1 service time TS 1 (Z ) , we define:
H 1( R ,i ,i − j ,− D21 ) (Z ) : The Z-transform of the time already elapsed from the instant S 1 selects
a basic backoff in [0 ,W − 1] (i.e. being in one of the states (~ S 2 , i , i ,− D21 ) ) to the time it is
found in the state (R , i , i − j ,− D 21 ) .
103
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
We evaluate H 1( R ,i ,i − j ,− D21 ) (Z ) for each state of S 1 Markov chain as follows:
H 1(~ S 2 ,W −1,W −1− j ,− D21 ) (Z ) =
1 j
Z , j = 0..D21
W
(25)
1
Z , i = D 21 ..(W ..2 )
W
Ts
1
T
(
)
H 1(~ S 2 ,i ,i ,− D21 ) Z = τ 22 Z e H 1(~ S 2 ,i + D21 ,i ,− D21 ) (Z ) +
W
i = 1.. max(0 , (W − 1 − D21 ))
H 1(~ S 2 ,i ,i ,− D21 ) (Z ) =
(26)
H 1(~ S 2 ,i ,i − j ,− D21 ) (Z ) = Z j H 1(~ S 2 ,i ,i ,− D21 ) (Z ), i = 1..W − 1,
j = 1.. min(i − 1, D 21 − 1)
H 1( S 2 ,i ,i − D21 ,− D21 ) (Z ) = Z D21 H 1( ~ S 2 ,i ,i ,− D21 ) (Z )
+ (1 − τ 22 )Z H 1( S 2 ,i +1,i +1− D21 ,− D21 ) (Z ), i = D21 ..(W − 2 )
H 1(~ S 2 ,0 ,0 ,− D21 ) (Z ) =
1
+
W
min (W −1,D21 − 1)
∑ H 1(
i =1
~ S 2 ,i ,1,− D21 )
(Z )
(27)
(28)
(29)
(30)
If the station S 1 transmission state is (~ S 2 ,0 ,0 ,− D21 ) , the transmission will be
successful since S 2 was decrementing its shifting backoff. Whereas when the station
S 1 transmission state is (S 2 , D21 ,0 ,− D21 ) , the transmission occurs successfully only if
S 2 doesn’t transmit with the probability (1 − τ 22 ) . Otherwise S 1 selects another backoff
and tries another transmission. After m retransmissions, if the packet is not
acknowledged, it will be dropped.
TS 1 (Z ) = Z
Ts
Te
(H 1(
(Z )+ (1 − τ 22 )H 1(S2 ,D21 ,0 ,− D21 ) (Z ))∑ Z
m
~ S 2 ,0 ,0 ,− D21 )
Tc
T
+ Z e τ 22 H 1( S 2 ,D21 ,0 ,− D21 ) (Z )
i =0
m +1
Tc
Te
τ 22 H 1(C2 ,D21 ,0 ,− D21 ) (Z )
(31)
5.2. Z-transform of station S2 service time
In the same way, we define TS 2 (Z ) , the Z-transform of station S 2 service time. We
have:
H 2(i ,k ,D21 − j ,D21 ) (Z ) : The Z-transform of the time already elapsed from the instant S 2
selects a basic backoff in [0 ,W − 1] (i.e. being in one of the states (i , i , D 21 , D 21 ) ) to the
time it is found in the state (i , k , D 21 − j , D 21 ) .
H 2(i ,i ,D21 ,D21 ) (Z ) =
104
1
, i = 0 and i = W − 1
W
(32)
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
Ts
1
T
+ τ 12 Z e H 2(i +1,i ,0 ,D21 ) (Z ), i = 1..W − 2
H 2(i ,i ,D21 ,D21 ) (Z ) =
W
(33)
j
To compute H 2(i ,i ,D21 − j ,D21 ) (Z ) , we define Tdec
(Z ) such as:
0
Tdec
(Z ) = 1
(1 − τ 11 )Z
j
(Z ) =
Tdec
1 − τ 11 Z
So:
(34)
Ts
Te
, j = 1..D21
(35)
j −1
(Z )
Tdec
j
(Z ), i = 0..W − 1,
H 2(i ,i ,D21 − j ,D21 ) (Z ) = H 2(i ,i ,D21 − j +1,D21 ) (Z )Tdec
j = 1..D21 , (i , j ) ≠ (0 , D 21 )
And:
(36)
H 2(i ,i −1,0 ,D21 ) (Z ) = (1 − τ 12 )ZH 2(i +1,i ,0 ,D21 ) (Z ) +
(1 − τ 12 )ZH 2(i ,i ,0 ,D21 ) (Z )
1 − τ 12 Z
Ts
Te
, i = 2..W − 2
(37)
D21
(Z )
Tdec
H 2(W −1,W − 2 ,0 ,D21 ) (Z ) =
(1 − τ 12 )ZH 2(W −1,W −1,0 ,D21 ) (Z )
1 − τ 12 Z
Ts
Te
, i = 2..W − 2
(38)
D21
Tdec
(Z )
D21
(Z )
H 2(0 ,0 ,0 ,D21 ) (Z ) = (1 − τ 11 )ZH 2(0 ,1,0 ,D21 ) (Z )Tdec
+
(1 − τ 12 )ZH 2(1,1,0 ,D21 ) (Z )
1 − τ 12 Z
Ts
Te
(39)
D21
(Z )
Tdec
Therefore, we can derive an expression of S 2 Z-transform service time as follows:
Tc
T
TS 2 (Z ) = τ 12 Z e H 2(0 ,0 ,0 ,D21 ) (Z )
m +1
+ (1 − τ 12 )Z
Ts
Te
Tc
T
H 2(0 ,0 ,0 ,D21 ) (Z ) τ 12 Z e H 2(0 ,0 ,0 ,D21 ) (Z )
i =0
m
∑
(40)
5.3. Service Time Distribution
Service time distribution is obtained by inverting the service time Z transforms given
by equations (31) and (40). But we are most interested in tail behaviour in terms of
service time bounds, i.e. the probability that the service time exceeds a certain value.
Probabilistic bounds on service time can be derived by inverting the complementary
service time Z transform [4] given by:
105
i
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
1 − TS i (Z )
~
X i (Z ) =
1− Z
(41)
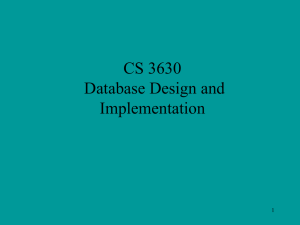
In figures 3(a) to 3(d), we depict analytical and simulation values of the Complementary
service time distribution of both stations S 1 and S 2 . The curves are obtained for different
values of the contention window size W and for different values of D21 ( D21 is given in
slots). The stations transmit 512 bytes data payload packets and we use the 802.11.b
parameters (given in table 1) to determine the values of Te , Ts and Tc . Simulation results are
obtained with ns-2 network simulator [9].
Table 1:
1: 802.11 b parameters.
Data Rate
11 Mb/s
Slot
20 µs
SIFS
10 µs
DIFS
50 µs
PHY Header
192 µs
MAC Header
272 µs
ACK
112 µs
Short Retry Limit
7
All the curves drop gradually to 0 as the delay increases. Station S 1 curves drop to 0 faster
than station S 2 curves. Indeed, when W = 32 and D 21 = 4 , the probability that S 1 service
time exceeds 0.005s equals 0.28%. Whereas, station S 2 service time exceeds 0.005s with the
probability of 5.67%. Thus, DM offers better service time guarantees for the flow with the
highest priority.
(a) W=16
106
(b) W=32
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
(c) W=64
(d) W=128
Figure 3: Complementary Service Time Distribution
Moreover, we notice that each time W doubles its size, S 1 and S 2 service time curves
become closer. Indeed, when W becomes large, the basic backoff values selected by S 1
and S 2 increase. Hence, the shifting backoff slots (DMSB) added by DM become
negligible compared to the basic backoff. The whole backoff values (WHB ) of the two
stations become near and their service time accordingly.
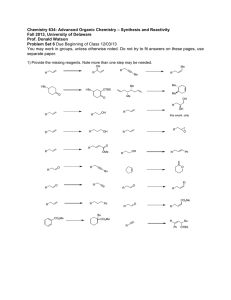
5.4. Extended Simulation Results
In the above section, we considered a two station scenario where each station transmits a
real time flow with a given delay bound. We showed that DM performs service differentiation
over 802.11 and offers better service time bounds for the flow with the short deadline.
In this section, we consider a five station scenario where each station transmits a real time
flow with a characterized delay bound. For this scenario, we consider the default 802.11b
minimum and maximum windows sizes ( CWmin = 32 , CWmax = 1024 ). Simulation results
show that the delay bounds on service time decrease with the deadline bounds.
Moreover, as the difference between flows deadlines increases, the difference between
their delay bounds increases.
107
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
(a) D51=4
(c) D51=12
(b) D51=8
(d) D51=16
Figure 4: Complementary Service Time Distribution (Extended Simulation Results)
6. Conclusion
In this paper we proposed to support the DM policy over 802.11 protocol. Therefore,
we used a distributed scheduling algorithm and introduced a new medium access
backoff policy. Then we proposed a mathematical model to evaluate the performance of
the DM policy in terms of service time guarantees for a scenario where two stations
with different delay bounds contend for the channel. Analytical and simulation results
show that DM performs service differentiation over 802.11 and offers better service
time guarantees for the flow having the small deadline. Moreover, as the difference
between flows deadlines increases, the difference between their delay bounds increases.
7. References
[1] Bianchi, G., ”Performance Analysis of the IEEE 802.11 Distributed Coordination Function”, IEEE J-SAC Vol.
18 N. 3, Mar. 2000, pp. 535-547.
[2] IEEE 802.11 WG, ”Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY)
specification”, IEEE 1999.
108
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
[3] IEEE 802.11 WG, ”Draft Supplement to Part 11: Wireless Medium Access Control (MAC) and physical layer
(PHY) specifications: Medium Access Control (MAC) Enhancements for Quality of Service (QoS)”, IEEE
802.11e/D13.0, Jan. 2005.
[4] Engelstad, P.E. and Osterbo O.N., ”The Delay Distribution of IEEE 802.11e EDCA and 802.11 DCF”,
Proceedings of the International Performance Computing and Communications Conference, Arizona, Apr. 2006.
[5] Engelstad, P.E., Osterbo, O.N, “Delay and Throughput Analysis of IEEE 802.11e EDCA with Starvation
Prediction”, In proceedings of the The IEEE Conference on Local Computer Networks , LCN’05 (2005).
[6] Kanodia, V., Li, C., ”Distribted Priority Scheduling and Medium Access in Ad-hoc Networks”, ACM Wireless
Networks, Volume 8, Nov. 2002. [6] Kleinrock, L., “Queuing Systems,Vol. 1”, John Wiley, 1975.
[7] Kleinrock, L., “Queuing Systems,Vol. 1”, John Wiley, 1975.
[8] Leung, J. Y. T., Whitehead, J, “On the Complexity of Fixed-Priority Scheduling of Periodic, Real- Time
Tasks”, Performance Evaluation (Netherlands), pp. 237-250, Dec. 1982.
[9] McCanne, S., Floyd, S., The network simulator - ns-2, http://www.isi.edu/nsnam/ns/.
[10] Zhai, H., Kwon, Y., Fang, Y., .Performance Analysis of IEEE 802.11 MAC protocol in wireless LANs.,
Wireless Computer and Mobile Computing, 2004.
Authors
Inès El Korbi received the engineering degree and the Master degree in computer science
in 2003 and 2005 respectively from l’Ecole Nationale des Sciences de l’Informatique (ENSI),
Université de la Manouba, Tunisia. Currently she’s applying for a PHD degree. From 2004
she operates as a student researcher in cooperation projects between l’ENSI (Tunisia) and
l’Institut National de Recherche en Informatique et en Automatique (INRIA) in France.
Leila Azouz Saidane is Professor at l’ENSI, Tunisia. Her research interests include
performance evaluation of QoS networks, wireless and sensor networks. From 2004, she
initiates many cooperation projects between l’ENSI and l’INRIA in France.
109
International Journal of Software Engineering and Its Applications
Vol. 2, No. 2, April, 2008
110