Introduction to computational quantum mechanics Lecture 2: Simen Kvaal
advertisement

Introduction to computational quantum mechanics
Lecture 2: Abstract QM: Operators in Hilbert space and dynamics
Simen Kvaal
simen.kvaal@cma.uio.no
Centre of Mathematics for Applications
University of Oslo
Seminar series in quantum mechanics at CMA
Fall 2009
Outline
Brief summary, and a warning
Basic notions from functional analysis
Spectral representation of self-adjoint operators
Existence of dynamics: sketch of formal proof
The time-independent Schrödinger equation
Outline
Brief summary, and a warning
Basic notions from functional analysis
Spectral representation of self-adjoint operators
Existence of dynamics: sketch of formal proof
The time-independent Schrödinger equation
Warning
This lecture will contain a mixture of rigorous and non-rigorous notions.
The idea is to sketch out (for physicists) some aspects of the (difficult)
analysis needed to to QM properly, and also to give (for mathematicians) an
idea of the (extremely handy) notation and (sound) ideas physics uses in
QM, without resorting to mathematically rigorous analysis. We shall see,
that in many cases the formal manipulations are in fact ok!
Luckily, we will not need these manipulations in the coming lectures.
Classical mechanics
I
States: points (x, p) = (~x1 , x~2 , . . . ,~xN ,~p1 , . . . ,~pN ) ∈ R2Nd = “phase
space”.
I
Observables: functions ω(x, p)
Hamiltonian: H = H(x, p) = energy function.
Time evolution: Hamilton’s equation:
I
I
ẋ = ∇p H[x(t), p(t)],
ṗ = −∇q H[x(t), p(t)].
Quantum mechanics
I
I
I
I
States: elements ψ(~x1 , · · · ,~xN ) in a complex Hilbert space H
Observables: Self-adjoint linear operators Ω(x̂, p̂), obtained from the
classical observables ω(x, p) by substituting x → x̂ and p → p̂ = −ih̄∇p
Hamiltonian: H = H(x̂, p̂) = energy operator
Time evolution: Time dependent Schrödinger equation:
ih̄ψ̇ = Hψ.
Outline
Brief summary, and a warning
Basic notions from functional analysis
Spectral representation of self-adjoint operators
Existence of dynamics: sketch of formal proof
The time-independent Schrödinger equation
Some notation
We will use standard physicist’s notation today:
I Spaces: H , P, etc.
I States: |Ψi ∈ H etc.
I Representation of states: Ψ(x) = hx|Ψi, etc.
I Dual space and dual states: H ∗ and hΦ|, etc.
I Inner product: hΦ|Ψi etc.
I Operators: A, B, |Ψi hΦ|, etc.
I Vectors: c ∈ CN , etc.
I Matrices: A, B, etc.
Finite dimensions: dim(H ) = N < ∞
If dim(H ) = N < ∞, everything is very nice:
I H essentially is CN . Choosing a basis, |Ψi can be identified with a
standard column vector c, and any operator A can be identified with a
matrix A wrt this basis.
c1
A11 · · · A1N
c2
..
|Ψi ↔ .
hΨ| ↔ c∗1 · · · c∗N
A ↔ ...
.
.
.
AN1 · · · ANN
cN
I
I
Any norm/inner product (i.p.) on H is equivalent to every other.
The spectrum σ(A) is easily characterized:
σ(A) = {λ ∈ C : A − λI has no inverse}
= { roots of char. polynomial: det(A − λI) = 0}
Finite dimensions: dim(H ) = N < ∞
. . . but boring:
[P, Q] = −ih̄I
has no solution!
Example
We consider a finite-dimensional
Hilbert space spanned by N orthogonal,
√
smooth functions ψn (x) = 2 sin(nπx), 0 < x < 1:
H
= span{|ψn i : 1 ≤ n ≤ N}
)
(
N
=
∑ cn |ψn i
: c ∈ CN
⊂ L2 (0, 1).
n=1
I
The differential operator D = d/dx now has the matrix representation
Dnm = hψn |ψ0m i =
I
Z 1
0
ψn (x)ψ0m (x) dx
Moreover,
|φi = D |ψi ↔ d = Dc
Infinite dimensions: dim(H ) = ∞
If dim(H ) = ∞, things gets much more interesting:
I Norms/i.p’s are no longer equivalent to each other
I While |ψi is an infinite dimensional vector, it is not true in general (but
often!) that
A ↔ “infinite dimensional matrix”
I
The interesting operators are unbounded:
unbounded ⇔ discontinuous ⇔ not defined on all of H
We must consider the domain D(A) ⊂ H of A:
A : D(A) −→ H ;
I
D(A) a dense subset in H
Spectral theory is much more complicated.
σ(A) = σdiscrete (A) ∪ σcontinuous (A) ∪ σresidual (A)
Spectra
Comparison of possible operator spectra in finite (left) and infinite
dimensions (right).
σ(A) =
σ(A) =
Example revisited
I
√
The ψn (x) = 2 sin(nπx) actually constitute a basis for the whole space
L2 (0, 1), and also H k (0, 1), k ≥ 0.
)
(
H = L2 =
∞
∑ cn |ψn i : ∑ |cn |2 < +∞
n
n=1
I
This space contains many strange functions . . . For example, the
so-called Weierstrass functions:
∞
|φi =
∑ 2−n |ψ2n i
n=1
I
This is a no-where differentiable – but continuous – function. Its graph
is a fractal curve. (See weierstrass.m)
⇒ The operator D = d/dx is not defined on |φi. It is easy to see that D
is unbounded:
kDψn k ≥ Cn → +∞.
Outline
Brief summary, and a warning
Basic notions from functional analysis
Spectral representation of self-adjoint operators
Existence of dynamics: sketch of formal proof
The time-independent Schrödinger equation
Bounded and unbounded operators
I
For an arbitrary linear operator A on H , with (dense) domain D(A), we
consider the operator norm kAk given by:
kAk := sup {kAψk : |ψi ∈ D(A)}
I
For example, the operator D = d/dx on L2 (0, 1) is unbounded:
kDψn k ≥ Cn → +∞.
I
I
I
Any operator on a finite dimensional space is bounded.
For bounded operators D(A) may be extended uniquely to the whole of
H , so there is no need to consider domains in this case. (We just saw a
counterexample if D is unbounded.) Moreover, even if A is bounded,
the spectrum may be continuous.
Also, Hamiltonians and observables are unbounded in almost every
interesting case, so no free lunch.
Adjoints
In physics, it is common to “define” the adjoint A∗ of A as:
Definition (“Adjoint”)
The operator A∗ such that hψ|Aφi = hA∗ ψ|φi for all |ψi , |φi ∈ H .
I
The problem is, this is not well defined due to domain concerns. The
defining expression is meaningless for lots of |ψi , |φi ∈ H . The
mathematical definition of the adjoint is subtle.
Definition (Adjoint)
Let A : D(A) → H be a (possibly unbounded) operator. We define the
adoint A∗ : D(A∗ ) → H as follows:
D(A∗ ) := {|φi : ∀ |ψi ∈ D(A), ∃ |χi such that hφ|Aψi = hχ|ψi}
The operator A∗ is then defined by:
A∗ |φi := |χi .
Symmetric/Hermitian vs. self-adjoint
Definition (Self-adjoint)
A is said to be self-adjoint if A∗ = A, which of course also means
D(A∗ ) = D(A).
Definition (Symmetric/Hermitian)
The operator A is said to be symmetric if hψ|Aφi = hAψ|φi for all
|ψi , |φi ∈ D(A).
I
I
I
This does not imply that A∗ = A, since D(A∗ ) 6= D(A) in general, even
though A may be symmetric. Symmetry states that A∗ |D(A∗ )∩D(A) = A.
Unfortunately, in order to do spectral theory for a physical system, we
need H ∗ = H rather than the weaker statement that “H is Hermitian”.
Of course, in finite dimensions, Hermitian/symmetric and self-adjoint is
the same.
Diagonalization
In standard physics treatments, there is usually no distinction between
“Hermitian” operators and the diagonalizability of such:
Theorem (Physics Myth 1)
For any Hermitian operator A we can “diagonalize” A: There is a basis for
H of eigenvectors.
A = ∑ En |ψn i hψn | +
Z
dE(ξ) |ψ(ξ)i hψ(ξ)| ,
n
with
hψn |ψm i = δnm ,
hψ(ξ)|ψ(η)i = δ(ξ − η)
Problems:
I The “continuous eigenvectors” |ψ(ξ)i (e.g., plane waves) are not
elements of H
I It turns out, that if A is self-adjoint, such a decomposition is almost
correct! A very powerful theorem.
Spectral representation of self-adjoint operators
Theorem (Spectral theorem for A = A∗ )
Let A = A∗ . Then there exists a right semicontinuous projection-valued
function P : R → B(H ), i.e., P(λ) = P(λ)∗ and P(λ)2 = P(λ) for all λ, such
that
Z
λdP(λ).
A=
R
Furthermore, P(λ) → 1 (strongly) as λ → +∞, and P(λ) → 0 (strongly) as
λ → −∞.
I
If σc (A) = [a, +∞) and σd (A) ⊂ (−∞, a), this reduces to
A=
∑
λn ∈σd
λn |ψn i hψn | +
Z +∞
λ |ψ(λ)i hψ(λ)| dλ,
a
where the continuous vectors are to be interpreted formally:
Z d
c
|ψ(λ)i hψ(λ)| dλ = P(d) − P(c).
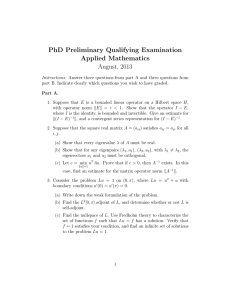
Spectrum of self-adjoint operators
continuous spectrum
0
isolated eigenvalue
approx. eigenvalue
Figure: The spectrum of a typical self-adjoint Hamiltonian. There is a set of discrete,
isolated eigenvalues Ek < 0, which may be infinitely many, and a continuous
spectrum for E > 0.
The approximate eigenvalues have “Weyl sequences”: (|φn i), kφn k = 1, |φn i * 0,
k(A − λ1) |φn i k → 0. That is, there “almost” exists a non-trivial solution to
(A − λ1) |ψi = 0.
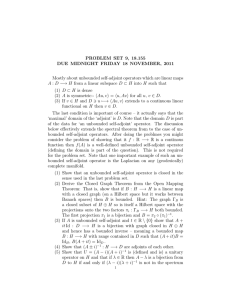
Visualization of spectral family P(λ)
Figure: The projection-valued function P(λ) makes jumps at the eigenvalues, where
a “dimension is added” along the eigenvector, but is usually smooth in the continuous
spectrum, where infact an infinitude of dimensions is added in each small interval!
Example 1: The operator x̂ on L2 (R)
The operator x̂, defined by
(x̂ψ)(x) := xψ(x)
is unbounded. It has spectrum σ(x̂) = σc (x̂) = R. Spectral decomposition:
Z
x |xi hx| dx.
x̂ =
R
Here, dP(x) = |xi hx|. This justifies the notation:
Z
1=
|xi hx| ,
R
so that
|Ψi =
Z
R
|xi hx|Ψi dx =
Z
Ψ(x) |xi dx,
R
expansion of |Ψi in a “continuous basis”, with coefficients Ψ(x) = hx|Ψi.
Example 2: The operator p̂ on L2 (R)
The operator p̂, defined by
(p̂ψ)(x) := −i
∂
ψ(x)
∂x
is unbounded. It has spectrum σ(p̂) = σc (p̂) = R. Spectral decomposition:
Z
p |pi hp| dp,
p̂ =
R
1
hx|pi = √ eipx
2π
Here, dP(p) = |pi hp|. This justifies the notation:
Z 1
1=
|pi hp|
0
Ψ(p) = hp|Ψi .
Moreover,
|Ψi =
Z
R
Ψ(x) |xi dx =
Z
R
i.e., the Fourier transform!
Ψ(p) |pi dp =
Z R
1
√
2π
Z
R
e Ψ(p) dp |xi dx,
ipx
Example 3: The prototypical Hamiltonian H
For a wide class of actual Hamiltonians, we have
σd (H) ⊂ (−∞, 0),
σc (H) ⊂ [0, +∞).
For σd , we have eigenvectors, for σc we have “approximate” eigenvectors:
1 = ∑ |ψn i hψn | +
n
Z ∞
|ψ(E)i hψ(E)| dE
0
This is (probably) the most general setting we will consider in the next
lectures.
Outline
Brief summary, and a warning
Basic notions from functional analysis
Spectral representation of self-adjoint operators
Existence of dynamics: sketch of formal proof
The time-independent Schrödinger equation
Dynamics
I
If H = H ∗ , and |φi ∈ D(H), then the unique solution to the time
dependent Schrödinger equation
i
∂
|ψ(t)i = H |ψ(t)i ,
∂t
|ψ(0)i = |φi
is given by
|ψ(t)i = U(t) |ψ(0)i = exp(−itH) |ψ(0)i .
I
The family {U(t) : t ∈ R} forms a one-parameter unitary group, viz,
U(t)∗ U(t) = U(t)U(t)∗ = 1,
I
U(s + t) = U(s)U(t),
Note: kU(t)k = 1 and U(t) is a bounded operator.
U(−t) = U(t)∗ .
Exponentials
Definition (Exponential of bounded operator A)
If kAk < ∞, then the exponential exp(A) can be defined by power series.
∞
B = exp(H) :=
1
∑ n! An .
n=0
Moreover,
I
∂
exp(zA) = A exp(zA).
∂z
Bounded operators form a complete normed space (Banach space), and
k exp(zH)k < ∞. Hence kBk is actually a bounded linear operator.
Limits are also meaningful due to completeness, and thus also
parameter differentiation.
Approximation family Aλ to A
I
I
I
When A is unbounded the power series does not make sense. Firstly,
because it would only be defined on the space lim D(An ), if this exists at
all.
When A = A∗ , however, we may define the exponential exp(−itA) for
any real t.
For any λ > 0 we define Aλ by
Aλ :=
I
i
λ2 h
(A + iλ)−1 + (A − iλ)−1
2
Aλ can be proven to be bounded, self-adjoint, and
k(A − Aλ )ψk → 0
I
∀ψ ∈ D(A2 ).
We now may define exp(−itAλ ) by power series.
Further properties of Aλ
I
I
Fact: The family {exp(−itAλ ) : λ > 0} is a Cauchy family on D(A2 ) so
it converges to a bounded operator since the latter is in fact dense.
We now define
exp(−itA) := lim exp(−itAλ )
λ→∞
I
Fact: For any self-adjoint A, U(t) = exp(−itA) is unitary:
U(t)U(t)∗ = U(t)∗ U(t) = 1,
I
I
I
(which is bounded).
U(−t) = U(t)∗ .
Fact: U(t)ψ solves iψ̇ = Hψ for all ψ ∈ D(H) and all t ∈ R. This is
again proven by considering the limit λ → ∞. In this case,
differentiation and λ-limit may be exchanged, giving the result.
It is quite remarkable, that the exponential of an unbounded operator
can be approximated by the exponential of a bounded family of
operators.
The converse theorem also is true: “Stone’s theorem.” Given U(t) there
exists H = H ∗ s.t. U(t) = exp(−itH).
Outline
Brief summary, and a warning
Basic notions from functional analysis
Spectral representation of self-adjoint operators
Existence of dynamics: sketch of formal proof
The time-independent Schrödinger equation
Motivation for many numerical methods
I
Consider the EVP for H, i.e., the time independent Schrödinger
equation: Find |ψn i ∈ H and En ∈ R such that
H |ψn i = En |ψn i .
I
Clearly, using |ψn i as initial condition,
exp(−itH) |ψn i = exp(−itEn ) |ψn i ,
I
I
so the solution to the TDSE is trivial.
Moreover, in reality, any physical system is never perfectly isolated. It
will interact with its environment. Statistics dictate that |ψ(t)i will tend
to |ψ0 i – the eigenvector with the smallest eigenvalue E0 (assuming that
it exists).
This motivates the study of the eigenvalue problem, which will be our
main occupation henceforth.
References
Gustafson, S.J. and Sigal, I.M.
Mathematical Concepts of Quantum Mechanics
Springer, 2003
Kreyzsig, E.
introductory Functional Analysis with Applications
Wiley, 1978