Supplementary information to “Generation of intermediate-depth earthquakes by self-localizing thermal runaway”
advertisement

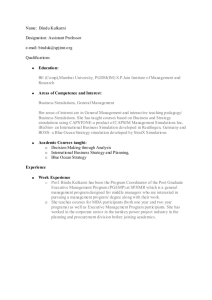
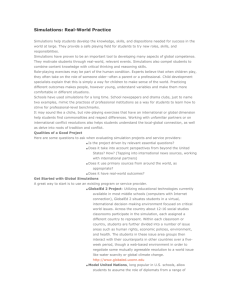
Supplementary information to “Generation of intermediate-depth earthquakes by self-localizing thermal runaway” Timm John, Sergei Medvedev, Lars Rüpke, Torgeir B. Andersen, Yuri Y. Podladchikov, Håkon Austrheim Supplementary Methods The numerical model used in this study is based on the theoretical work of Braeck and Podladchikov1. However, several important new features were added: • Finite rheology perturbations caused by fluid infiltration were included instead of a small thermal perturbation. • The temperature in the SLTR process is commonly higher than the solidus, thus melting was included. • We observed significant grain size reduction in highly deformed areas, and consequently we included material weakening effects due to grain size reduction where this was required. • In some simulations finite loading rates were used to evaluate the effect of stress build up on the system. This differs from our main model, in which the peak stress is set as an initial condition. • It may be expected that the initial model set-up favors low temperature/high confining pressure plasticity (Peierl´s plasticity). Consequently, we include a simulation governed by this rheology and show how SLTR may be affected. 1 Introduction: Self-Localizing Thermal Runaway (SLTR) We present here the main ideas and results of Breack and Podladchikov1 slightly reformulated for the purposes of our study. Stress, strain, and energy balance in a viscoelastic body In the model, an “infinite” viscoelastic slab with fixed boundaries has a width L and an initial temperature, Tbg (Figure 1s). The slab is subjected to an initial shear stress, σ0, which forces deformation of the slab. There is no other source of deformation, and when the stress drops near the end of a simulation, the deformation process ceases. Supplementary Figure 1s. Initial setup of the model. The model is 1-dimensional (independent of the y coordinate), and all the 2-dimensional illustrations of the numerical model are made by translating the 1-dimensional model in the y direction. The blue strips indicate the positions of passive markers and the red strip shows the position of the initially perturbed zone. 2 The energy and stress balance in the slab are given by: $T $ 2T ! % $v 1 $! & =" 2 + ' $t $x # C p (* $x G $t )+ (1) "! = 0, "x (2) and where x is the coordinate across the width of the slab, v is the velocity, σ is the stress, G is the shear modulus and T is the temperature. Because the system is assumed to be invariant to translation along its length, the governing equations can be expressed in a one-dimensional form. The parameters used are listed in Table 1. Equation (2) states that the shear stress in the system is independent of the space coordinate. The constitutive equation for the viscoelastic material is described by the Maxwell model: "v ! 1 "! = + , "x µ G "t (3) where µ is the effective viscosity, which is assumed to depend on stress and temperature according to the power-law creep relationship: µ= ! 1" n e E RT , A (4) 3 where A is the pre-exponential factor, E is the activation energy, n is the power law exponent, and R is the universal gas constant. Model set-up Substitution of the expression for the shear strain rate, eq. (3), and the constitutive equation, eq. (4), into eq. (1), and integrating eq. (3) over the width of the slab yields two governing equations for the temperature profile, T(x,t), and stress, σ(t): $T $ 2T !2 , =" 2 + $t $x µ# C p (5) L/2 #! G dx . =" ! $ #t L "L/ 2 µ (6) where L is the width of the slab. In deriving eq. (6) the boundary condition v=0 was used at the both ends of the slab. We also assumed zero thermal flux along the sides of the slab. In the initial undeformed condition, the rheological properties were homogeneous except for a central zone of width h in which the rheology differs from that in the main domain (Table 1). In the corresponding geological system, the difference in rheological properties is attributed to the initial influence of fluid-rock interaction. The intensity of the perturbation is measured by the dimensionless parameter δ. We follow Braeck and Podladchikov1 and generalized their parameter 4 Δp, which is used to specify rheological perturbations caused by thermal gradients only. The integral in eq. (6) may be scaled to a dimensionless form and evaluated at time 0 assuming that the temperature and rheology are uniform within the two domains (both perturbed and unperturbed): ! "1 = % p = L/2 µp h # µp dx = + '1 " L " L / 2 µ t =0 µbg L ') µbg µp + $ µp , (( & µ bg * (7) where µbg and µp are the effective viscosities in the unperturbed and perturbed areas at time 0. The error introduced by replacing the exact expression for δ with δ=µbg/µp is small because the width of the perturbed zone is much smaller than the width of the slab, h/L<<1. The model is designed to reduce the influence of the boundary conditions. The static boundaries and the absence of any other dynamic control of the deformation of the slab is the most simple scenario for the development of instability, which is also the least likely to lead to instability. The only driving force in the system is the initially imposed shear stress. This stress vanishes with time due to deformation and heat induced creep. Our set-up differs significantly from those used in some other studies (e.g., ref 3) in which thermal runaway is forced by a continuous background strain rate. To illustrate how our set-up depresses the development of a shear heating instability and to evaluate how the stress loading may have occurred and how the system reacts on this loading, we present four simulations (Simulations 4, 5, 6, and 7) in which the boundaries are forced to move. Due to lack of field data that can be interpreted in terms of a quantitative model for stress build up, these simulations are 5 presented for illustrative purposes, and the conclusions of our study are not based on these simulations. A detailed analysis of behaviour of the model with moving boundaries can be found elsewhere (e.g., refs. 3 and 31). Conditions for SLTR Braeck and Podladchikov1 showed that the temperature rise in a viscoelastic body subjected to an initial shear stress, σ0, is determined by two dimensionless ratios, σ0/σc and td/tr, where ! c = T0 2G " C p R E# is the characteristic stress of the viscoelastic slab, td=h2/κ is the characteristic thermal diffusion time in the system, and tr=µpδ /(2G) is the characteristic stress relaxation time in the viscoelastic body (Maxwell relaxation32). Braeck and Podladchikov5 consider small perturbations of the system, so that δ≈1. Our study considers finite perturbations. Moreover, we are interested in how larger perturbations affect the stability of the viscoelastic body. We therefore recalculate the deformation regime diagram of Braeck and Podladchikov1 for the cases of higher perturbations (e.g., δ =50, Figures 2sA). The calculations are based on the procedure described in Braeck33. For better comparison among our different simulations, we also remove the parameter δ from the characteristic stress, so that ! c* = T0 2G " C p R E . This simplification allows direct comparison of simulations with different values of δ. The temperature rise Tmax in Figure 2s is scaled by Ta = L! 0 2hG " C p . This characteristic temperature assumes that the entire elastic energy initially stored in the body is adiabatically released as heat inside the perturbed zone. A non-localized thermal runaway process, in which the deformation and heat release are bounded 6 exactly by the initial perturbation, occurs in the area in the phase diagram where Tmax/Ta≈1 (high σ0/σc and low td/tr, indicated by the brown color in the deformation regime diagram shown in Figure 2s). Small values of Tmax/Ta <<1 indicate that the heat was released over a large area, and thus no self-localizing deformation can be expected (yellow to blue colors). There is, however, an area in the deformation regime diagram where Tmax/Ta >1. In this region, the energy balance requires that the heat should be released over an area, which is smaller than the area of the initial perturbation, and thus the deformation should be self-localized. The part of the diagram with Tmax/Ta >1 outlines conditions for SLTR (red color). Supplementary Figure 2s. Dependence of the maximum dimensionless temperature in the viscoelastic slab, Tmax/Ta, on two dimensionless ratios (see text for description of parameters). The diagram is constructed for an initial perturbation of δ = 100. The most significant change in the values of the temperature rise is across the critical line (green), which separates “stable” (Tmax/Ta <<1) and “unstable” (Tmax/Ta >1) regimes. Similar lines are plotted for a set of different initial perturbations (δ = 2, 5, and 100, with color coding corresponds to Figure 3 in the main text). (A) General view of the deformation regime diagram with different regimes outlined (see text for details). (B) Close up of the transitional area with points indicating initial conditions for several simulations presented in this study. Figure 2s also indicates the initial conditions for several numerical simulations presented in detail below. The position in the σ0/σc td/tr parameter space was selected 7 to be within the SLTR regime, but very close to the stable regime (Fig. 2sB). The proximity of these simulations to the critical lines demonstrates that the theory and the deformation regime diagram of SLTR, initially designed for thermal perturbations, works well for rheological perturbations of different intensities as presented in our study. The new scaling for the characteristic stress, σc*, which does not depend on the magnitude of the perturbation δ, facilitates evaluation of the effect of the perturbation intensity. Thus, simulation 10 would have been in the stable regime at δ = 100 or less, but is shifted towards the conditions suitable for SLTR at δ ≈ 200 (Fig. 2sB). Supplementary Discussion Application of the SLTR theory to intermediate-depth earthquakes The model was solved numerically using an implicit finite-difference method with a non-uniform space grid and non-uniform time steps. The expected localization of deformation in the center of the slab requires a mesh that is much finer in the center of the slab. The time step was varied adaptively during the numerical simulations to improve numerical efficiency and ensure accuracy. The results of several numerical simulations are presented to illustrate different styles of deformation, particularly SLTR, in the viscoelastic slab. The latent heat of melting was included in the energy balance for high temperature rise SLTR, and the decrease in viscosity associated with melting was taken into account by linearly decreasing the pre-exponential factor in eq. (4) by a factor of 103 between the solidus and liquidus temperatures. A factor higher than 103 would not change the conclusions derived from our simulations, because it would increase the effect of localization. However values much higher may be not consistent with neglecting inertia (in Eq. 2) and require additional studies. 8 Simulations 1 and 2 show how small differences in the initial set-up may result in large differences in the styles of deformation. In simulations 3-7 additional mechanisms such as stress loading and weakening due to mineral reactions that may affect the development of the system in nature are investigated. These simulations show that changes relevant to natural systems reduce the stress needed to achieve failure by SLTR. The final strain patterns and the catastrophic failure during SLTR (with rates of 100 m/s) are tuned to be similar in numerical simulations 2-7 by choosing appropriate initial stresses and rates of stress loading (see Table 1). Table 1 presents the parameters used in all the numerical simulations. We use power-law dislocation creep parameters (eq.4) that were experimentally derived for diabase26 in our reference simulations (1-5). We chose diabase because it is a finegrained equivalent to gabbro. The dislocation creep law is not grain size sensitive, thus absolute grain sizes are not important, however, we do consider the effect of relative grain sizes between perturbation and host. The results are compared with those obtained using another rheological law derived for diabase34 (simulation 6). We also demonstrate the influence of Peierl´s low-temperature plasticity using olivine as an example35-37. All the simulations use an initial rheological perturbation based on the field observations of localized fluid-rock interaction. This perturbation (δ ≈100) was estimated from the change in the pre-exponential factor, A, associated with the initial grain-size reduction and the reduction in the activation energy for creep, E, associated with hydration reactions20. Simulations 1 and 2: stable regime and SLTR These two reference simulations use parameters listed in Table 1 and they are described in the main text (Figure 1, panels B-E). The difference in the initial 9 conditions for these two simulations is small, yet the results differ significantly. In the second simulation, melting and highly localized deformation with a rate of 100-200 m/s occurred during catastrophic failure (at time 0 on Figure 3s). Simulation 3: additional weakening due to hydration-related grain-size reduction In this simulation a simplified model for the weakening of rocks due to straininduced grain-size reduction was used. The purpose was not to model the effects of grain-size reduction in detail, but rather to better understand the potential influence of grain-size sensitive viscosity. The pre-exponential factor A in the effective viscosity eq (4) is a function of the strain, ε, in this model: (8) A = A0 "10! where ! # $"crit ! crit " = " (! , ! crit , "crit ) = % $ " & crit ! < ! crit . (9) ! > ! crit The exponent ϕ increases linearly with increasing strain for strains between 0 and γcrit, and stays constant at a value of ϕcrit for strains larger than the critical strain, γ crit. The corresponding effective viscosity decreases exponentially with increasing strain, γ, as the strain increases from 0 to γ crit. The grain-size sensitive rheology presented in eqs. (8) and (9) is a simplified approach to the effects of grain-size on diffusion creep and grain boundary sliding discussed in Hirth and Kohlstedt37. Our field observations show that the grain size is 10 reduced by three orders of magnitude in the shear zones (with γ ≥ 3). This would correspond to a grain-size related drop in viscosity by four to six orders of magnitude38. A conservative approach was used in the simulations by choosing γ crit = 3 and ϕcrit =2.3. This corresponds to an additional drop in viscosity by a factor of 200 for γ ≥3. These parameters lead to significant reduction of the initial stress required for SLTR to occur, from 1.5 GPa in simulation 2 down to 0.9 GPa (Fig. 3s). We use this approach in the simulations 5 and 7 as well. Simulations 4, 5, 6, and 7: effect of stress loading via moving boundaries All the simulations outside of this section consider a peak shear stress as initial condition. Here, we allow the external boundaries of the slab to move (cf. Figure 1s) to simulate finite-rate loading. Mathematically, the only change required is addition of a source-like term equal to the rate of loading to the right-hand side of eq. (6). Simulation 4 is similar to simulation 2, but the initial stress is much smaller (Table 1, Figure 3s). The stress is continuously increased by moving the boundaries during the simulation until the temperature rises above the solidus. Results are presented for a loading rate of 50 Pa/s (which corresponds approximately to a background strain rate of ~10-9 s-1) with an initial stress of 100 MPa. The other parameters are the same as in the other simulations (Table 1). The resulting deformation of the slab is similar to that in simulation 2 (including a similar total displacement and melted zone width), but the maximum stress reached during the evolution of the system is much smaller, 1.1 GPa (an initial stress of 1.5 GPa was used in simulation 2). Consequently we conclude that fast, but not instantaneous, loading may reduce the stress required for SLTR by about 30%. 11 In simulation 5, combining the features of simulations 3 (continuous weakening due to reactions in progress) and 4 (stress loading) results in further reduction of the shear stress (to ~0.7 GPa) that must be reached for SLTR to occur (Figure 3s). The weakening by reaction in progress is simulated by a higher value of γcrit (4 vs. 3.3) and ϕcrit (3.3 vs. 2.3) than in simulation 3. This simulation requires a significantly slower rate of stress loading, 4.8 Pa/s corresponding to a strain rate of ~10-10 s-1 (cf. 50 Pa/s in simulation 4, Table 1). At a fast strain rate of ~10-10 s-1 loading would last less then 5 years, and SLTR would not occur if the loading rates in simulations 4 and 5 were decreased. However SLTR does occur in simulations at an ambient temperature that is reduced by 40°C to account for loading starting at shallower depths, and a more pristine gabbro with less perturbations. In the final simulation (7) an even smaller perturbations, was used resulting in an ~8 times increase of the length of the slab to account for a less perturbed gabbro and a ~2.5 times decrease of the initial viscosity contrast of the perturbation. Simulation 6 is similar to 4, but the initial temperature is smaller (640 vs. 680 ºC, Table 1, Figure 3s). The stress again increases continuously because the boundaries are moved during the simulation. Results are shown for a loading rate of 5 Pa/s and an initial stress of 100 MPa (strain rate of ~10-10 s-1), which is significantly smaller rate than in simulation 4. Even though the maximum build stress reaches 1.2 GPa, the final stress drop due to SLTR is much lower than in simulation 1 and rather similar to simulation 5 (Fig. 3s). Simulation 7 is similar to 6, but now the effect of weakening by reaction in progress is added (Table 1, Figure 3s). We applied a loading rate of 0.3 Pa/s with an initial stress of 100 MPa (strain rate of ~7×10-12 s-1), which is more than an order of 12 magnitude slower than in simulation 6. The weakening by reaction in progress was included in the same way as it was in simulation 5. The more pristine rock before loading (a smaller initial perturbation of δ = 40) gave a larger reaction-induced rock weakening due to the longer loading time. This set up requires a maximum stress level of ~0.7 GPa (less than 50% of the initial stress in simulation (1) and results in the lowest stress drop of < 0.6 GPa. Supplementary Figure 3s. Stress evolution for the first five simulations in this study (see text and Table 1 for details). The time scales are shifted so that all failure occur at t=0. The loading process of the simulation 7 is started 90 years before the failure (not shown on the figure). The combination of loading (continuous stress increase) and weakening by reaction in progress along the perturbation reduces the required stress for SLTR by ca 60 % to 0.6-0.7 GPa. The stress drops in all simulations lie consistently between 0.75 and 0.6 GPa. Even though we use very different rates for loading (~10-10 vs. ~10-12 s1 ) the maximum stress and the stress drop in simulations 5 and 7 are almost identical. 13 The initial conditions of our simulations do not control the resulting stress drop. The rates of ~10-10 and ~10-12 s-1 are fast, but geological acceptable strain rates3,38, and an extreme type of deformation that may require rather extreme conditions to initiate38 occurs in earthquake fault zones. The stresses required to reach SLTR are high, but recent studies show that these stress values may be reached more often than was formerly anticipated. The numerical simulations of Kelemen & Hirth3 produced similar stress drops. Trepmann & Stöckhert39 interpreted the formation of microstructures in an eclogite-facies metagranite with 15 vol.% jadeite in terms of differential stresses of 1-2 GPa. Furthermore, seismologists report earthquakes stress drops in subduction settings of 0.25 GPa30, which is a lower limit for the peak stress since most of the released energy will be converted into heat40. Very likely, the peak stress is much greater than 0.25 GPa. Geological records of stress drops in subduction and lower crustal settings suggest, on the base of conservative estimates, 0.5-0.6 GPa17,38. All these findings show that the stresses used in our numerical simulations are geologically reasonable. Simulation 8: comparison between two experimentally derived flow laws for diabase Numerical simulations 1-7 are based on the flow law derived for diabase by Mackwell et al.26. To ensure the robustness of our conclusions this series of simulations was repeated with a flow law derived for another diabase34 (Table 1, sim. 8). The behaviour observed in this simulation resembles that of simulation 1 and 2 and results in an almost identical internal structure in the shear zone and the pseudotachylyte as shown in Fig.1, with a similar stress value evolution, but the period before the onset of SLTR is much shorter (16 hours vs. 30 days). These simulations show that the results of simulations 1-8 can be reproduced by using the 14 data set given for this diabase if the ambient temperature is decreased by 30°C, a change that is well within the error of the temperature estimations for the Kråkenes gabbro13. Simulations 9 and 10: effect of Peierls low-temperature plasticity Numerical simulations 1-8 are based on the idea that dislocation creep is the main mechanism of deformation. The initial pressure-temperature conditions and the range of initial shear stress applied to our model slab suggest that low-temperature plasticity29 described by Peierl´s law: q # E % ! & $ " p = AP exp ' ) *1 ) + ( , '. RT , ! P - (/ (10) may also influence deformation. In equation (19), εP is the strain rate associated with Peierl´s plasticity and AP, σP, and q are constants of the flow law. The other parameters are described in eq. (4) and in Table 1. Investigation of the lowtemperature plasticity parameters is not as common for diabase as for olivine26. We therefore perform the simulations based on olivine by following the concepts described in Kameyama et al.36. In simulation 9 only power-law dislocation creep was used as the deformation mechanism35,36 with the parameters listed in Table 1. The background temperature was increased up to 775°C to simulate processes happening at depths greater than those for the models based on the diabase rheology. Perturbations in the activation energy E and pre-exponential factor A are similar to those assigned to simulations 1-8, but the perturbation parameter was increased (δ = 200), due mainly to the larger 15 exponent in the power-law creep of olivine. As for simulations 2-8, we estimated the smallest initial stress required for SLTR. The resulting stress, 3 GPa, illustrates that dry olivine is significantly stronger than diabase if dislocation creep is the main deformation mechanism. Simulation 10 is based on the combination of two creep laws, dislocation power-law creep and Peierl´s low-temperature plasticity, with a total creep strain equal to the sum of the two creep laws. The parameters of the Peierl´s law, AP=5.7×1011 s-1, σP,=8.5 GPa, and q=2, are taken from Kameyama et al.36. Simulations show that for this combination SLTR occurs when the initial stress reaches only 1.5 GPa. Supplementary Figure 4s. Comparison of Byerlee’s brittle failure criterion with critical lines of SLTR for olivine. The blue line corresponds to creep of olivine governed by dislocations only. The red line also takes Peierls low-temperature plasticity into account. The diagram illustrates that the two critical lines differs for stresses higher than approximately 0.8 GPa and for lower temperatures. See simulations 9 and 10 for parameters of olivine creep. Byerlee brittle failure was calculated for a compressional regime assuming zero fluid pressure. Comparing the outcome of simulations 9 and 10 (Fig. 4s) demonstrates that decrease of the effective viscosity (by adding another creep mechanism) significantly 16 decreases the stress required for SLTR, and in this case it reduces the required stress by 50%. The deformation regime diagram of Figure 2s shows, however, that the decrease of the viscosity does not always result in stress required for SLTR, because for values of tr/td<1 the critical stress becomes independent of the viscosity. The reasonable fit of the results of simulation 10 to the deformation regime diagram (Figure 2sB) demonstrates the robustness of the theory developed by Braeck and Podladchikov1, which was based on power-law creep type rheologies with a temperature-stress-strain-rate relationship that is different from the Peierl´s creep law. However, according to Kameyama et al.36, Peierls creep (eq. 10) can be approximated by a power-law. Evaluation of the effect of the input parameters on the conditions for SLTR The numerical simulations discussed employ a variety of creep laws, creep parameters and stress loading scenarios, and support the idea that SLTR is a robust phenomenon that does not depend on a ‘fine-tuning’ of the temperature dependent material rheology. Here we evaluate the influence of other parameters that have been used in the numerical simulations. By varying the shear modulus (G) from 20-80 GPa, we obtain 20% variations of the stress required to produce SLTR. We also evaluated the effect of 30% variations in the thermal diffusivity (κ), density (ρ), heat capacity (Cp), and latent heat of melting, and in each case the resulting variation in the stress required to produce SLTR was 10% or less. These parameter evaluations illustrate that the results of our simulations are quite insensitive to significant variations in the input parameters. The influence of the magnitude of the initial perturbation and background temperature is discussed in the next section. 17 Comparison of conditions required for SLTR and brittle failure The critical lines presented on Fig. 2s can be expressed in the form of an equation for the critical initial shear stress, σ*, needed to eventually destabilize the system in the form of SLTR: #t $ "* = f! % r & , " c* ' td ( (11) where fδ is the position of the critical line on the phase diagram (Fig. 2s) for a given perturbation intensity δ (and other parameters described in section Conditions for SLTR). Eq. (11) is a non-linear algebraic equation for σ*, because µp and δ (in the expression for the stress relaxation time tr) depend on the initial stress σ* if the power-law exponent, n, is greater than unity (eq. 4). By using the material properties, the geometry of the slab (listed in Table 1), and the initial temperature, eq. (11) can be resolved to find the critical initial stress for a given magnitude of the initial perturbation, δ. This stress can be compared with the stress required for brittle failure of the rocks under the high confining pressure prescribed by Byerlee’s law41. Figure 4s illustrates that the different rheological creep laws for olivine that we applied resulted in different depths at which SLTR is more likely than brittle failure to occur. Adding Peierl´s low-temperature plasticity to dislocations creep reduces this depth significantly (Fig. 4s). Similar lines are constructed for the properties of diabase (Fig. 3 in the main text) to illustrate the dependence of the required critical stresses for SLTR on the intensity of the initial perturbation and different geothermal gradients. This comparison is generalized in the deformation regime diagram presented in Figure 5s. The deformation regime shows the depths below which SLTR requires less 18 differential stress than brittle failure. These depths depend on the initial perturbation of the system and the geothermal gradient. Under colder conditions (e.g., in subduction zones) a smaller perturbation is required for SLTR to be the preferential mode of failure. Supplementary Figure 5s. Conditions required for the critical stress for SLTR to be smaller than that defined by Byerlee’s law for brittle failure. At depths, below those indicated by this diagram SLTR is the dominant failure mode. Stars indicate the parameters used in the simulations shown in Figure 3 in the main text and Figure 2s (with corresponding color coding). This figure is calculated for diabase rheologies. Supplementary References 31. Kaus B. J. P., Podladchikov Y. Y. Initiation of localized shear zones in viscoelastoplastic rocks. Journal of Geophysical Research 111, B04412 (2006). 32. Turcotte, D. L. & Schubert, G. Geodynamics. Cambridge University Press, Cambridge. pp. 456. (2002). 19 33. Braeck, S. Mechanical failure of viscoelastic solids by self-localising thermal runaway. Unpublished PhD Thesis, Department of Physics, University of Oslo. pp. 98. (2007). 34. Caristan, Y. The transition from high-temperature creep to fracture in Maryland diabase. Journal of Geophysical Research 87, 6781-6790 (1982). 35. Karato, S.-I. & Wu, P. Rheology of the Upper Mantle - a Synthesis. Science 260, 771-778 (1993). 36. Kameyama, M., Yuen, D. A. & Karato, S.-I. Thermal-mechanical effects of lowtemperature plasticity (the Peierls mechanism) on the deformation of a viscoelastic shear zone. Earth and Planetary Science Letters 168, 159-172 (1999). 37. Hirth, G. & Kohlstedt, D. Rheology of the Upper Mantle and the Mantle Wedge: A View From the Experimentalists. In Subduction top to bottom (eds Bebout, G. E., Scholl, D. W., Kirby, S. H. & Platt, J. P) 83-105 (Geophysical Monograph 96, American Geophysical Union: Washington, 1996). 38. Trepmann, C. A. and Stöckhert, B., Quartz microstructures developed during nonsteady state plastic flow at rapidly decaying stress and strain rate. Journal of Structural Geology 25 (12), 2035 (2003). 39. Trepmann, C. and Stöckhert, B., Mechanical twinning of jadeite - an indication of synseismic loading beneath the brittle-plastic transition. International Journal of Earth Sciences 90 (1), 4 (2001). 40. Scholz, C. H. The mechanics of earthquakes and faulting (2nd edition). Cambridge University Press, Cambridge. pp. 471 (2004). 41. Byerlee, J. D. Friction of rocks. Pure Applied Geophysics 116, 615-626 (1978) 20 Table 1. Parameters used in the numerical simulations Sim. 1 Sim. 2 Sim. 3 Sim. 4 Sim. 5 Sim. 6 Sim. 7 Sim. 8 Sim.9&10 Parameter (reference) Initial stress, σ0 , GPa (if different from simulation 1) 1.5 0.9 0.1 0.1 0.1 0.1 50 4.8 5 0.3 Rate of stress loading, Pa/s - Initial temperature, T0 , ºC 680 640 640 Width of the body, L , m 30 240 240 Shear modulus, G , GPa 1.5 3/1.5 650 775 40 -n -1 1.1×10-26 eq.8 eq.8 eq.8 critical exponent ϕcrit (eq.8-9) - 2.3 3.3 3.3 critical strain γcrit (eq.8-9) - 3 4 4 Preexponential factor, A, Pa s 3.2×10-20 3.2×10-16 Power-law exponent, n 4.6 3.05 3.5 Activation energy, E , kJ/mol 480 270 540 Gas constant, R , J/mol K Density, ρ , kg/m 8.314 3 2900 2 3300 -6 Thermal diffusivity, κ , m /s 10 Heat capacity, Cp J/kg/K 740 Latent heat of melting, L, kJ 200 500 Solidus temperature, ºC 1100 1700 Liquidus temperature, ºC 1300 1800 Relative parameters of the perturbed zone: Width of the zone, h/L 1/600 Initial temperature, Tp - T0, ºC 2 Pre-exponential factor, Ap/A 16 Activation energy, Ep /E 0.95 Intensity of perturbation, δ 100 16.02 16.02 16.02 6.4 16.02 6.4 7.02 14 100.1 100.1 100.1 40 100.1 40 50 200/100 21