Foraging to balance conflicting demands: novel insights from grasshoppers under predation risk
advertisement

Behavioral Ecology VoL 8 No. 5: 551-559
Foraging to balance conflicting demands:
novel insights from grasshoppers under
predation risk
K. D. Rothley, Oswald J. Schmitx, and Jared L. Cohon
School of Forestry and Environmental Studies, Greeley Laboratory, 'Yale University,
370 Prospect Street, New Haven, CT 06511, USA
A
large body of evidence persuasively demonstrates that an. imal foraging behavior can be influenced by multiple,
conflicting demands or objectives (Cockbum, 1991; Mangel
and dark, 1988; Mangel and Ludwig, 1992; McNamara and
Houston, 1986; Stearns, 1993; Werner and Gilliam, 1984).
These demands may arise from exogenous sources, such as
die presence of predators (Houston et aL, 1993; lima and
Dill, 1990; Ludwig and Rowe, 1990; Mangel and dark, 1986;
McNamara and Houston, 1987, 1994; Sih, 1980; Werner and
Gilliam, 1984), or endogenous sources, such as physiological
demands for survival and reproduction (Cockbum, 1991;
Ludwig and Rowe, 1990; McNamara and Houston, 1996).
Each demand may also vary in its importance among different
environments. The challenge, dien, is to identify how animals
balance conflicting demands under different environmental
conditions.
One powerful way to understand how nnimaii balance conflicting demands or objectives is to represent foraging choices
in an optimization framework. In such a framework, the tradeoff between foraging demands, such as energy gain and predator avoidance (Ludwig and Rowe, 1990; Mangel and Clark,
1986; McNamara and Houston, 1987), is formalized mathematically using a combination of terms representing die demands. The model is then solved to identify die optimal
foraging strategy that balances die trade-off
Empirical tests of such trade-off optimization models have
had mixed IUCCCM, as behavioral shifts not anticipated by die
models are often observed. Usually animals exhibited broad
variation in their performance when compared to die single
predicted optimum strategy. This variation has been interpreted as an inability of foragers to make exact optimal
choices. (Janetos and Cole, 1981; Schluter, 1981; Ward, 1992;
Received 16 December 1996; accepted 26 February 1997.
1045-2249/97/S5.00 O 1997 International Society for Behavioral Ecology
Zach and Smith, 1981), as an indication of limiting constraints
that prevent animal« from foraging optimally in a particular
environment (Sih and Gleeson, 1995), or as die result of limited information (BouskHa and Blumstein, 1992). 'Variation in
die single optimal strategy is predicted only if diere is a
change in die limiting constraints or a change in die way in
which die terms representing die demands are nuuhematically combined.
But wim changes in die relative intensity of foraging demands, such as an increase in die number of predators, it is
unlikely diat any single trade-off strategy will maximize fitness.
Instead, animal* may adjust dieir trade-off strategy in response
to /-hanging environmental conditions, even if mere has been
no change in any potential limiting constraints. Hence, die
variation diat has been offered as evidence of suboptimal behavior in a classic optimization trade-off context may actually
be consistent widi adaptive (optimal) behavior (Schmitz et aL,
1997b).
Our understanding of animal behavior through optimization approaches may greatly improve by explicitly ^ramining
how animalu achieve a trade-off between conflicting demands.
Here we introduce a mediod, called multiobjective programming (Schmitz et aL, 1997b), to provide die framework for
this approach. Widi multiobjective programming, it becomes
possible to consider die consequences of conflicting demands
on behavior widiout having to make assumptions about how
mey enter into fitness. The key new insight we offer here is
diat we should not always expect animals to seek a single optimal strategy that achieves a specific trade-off balance applicable to all situations. Instead, we may observe a range of
strategies corresponding to die different weightings diat animals may place on objectives under changing environmental
conditions. By comparing actual feeding behavior to die strategies predicted by die multiobjective programming model, we
can let animal* tell us which demands are important to diem
and how uiey choose to trade-off these demands This insight
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
Animal foraging may be influenced by multiple demands simultaneously (eg., nutrient gain and predator avoidance). Conventional approaches to understand the trade-ofii between these demands require cramming them in ffmilar currencies, which is
impractical in many field situations. We introduce a new method, called multiobjective programming, as a framework to explore
how animals balance conflicting demands. Multiobjective programming allows one to explore die influence of foraging demands
directly, without explicit assumptions about how they enter into fitness and without conversion to some common currency. Using
multiobjective programming, we show that, as foraging demands change, animait may adaptivety adjust their behavior, even if
the constraints on feasible behavior are unaffected (contrary to die predictions of the conventional models). Hence, we may
see a variable response in foraging that is consistent with adaptive behavior. We used an empirical test with herbivore grasshoppers and predator spiders to evaluate die utility of multiobjective programming Our experiments show that grasshoppers are
able to optimally balance die foraging objectives of energy intake and vigilance under changing levels of predation risk. The
multiobjective model is used both to evaluate die biological «ignifiranrf of the broad variation that was observed in die grasshoppers' foraging behavior and to quantify explicitly die trade-off between energy intake and predator avoidance. Key words:
adaptive behavior, Mdanopius ftmui i ubrwn, multiobjective optimization, optimal foraging, single-objective optimization, tradeoffs, variability. fBthav Ecol 8:551-559 (1997)]
Behavioral Ecology VoL 8 No. 5
552
(Belovsky and Schmitz, 1991; Schmitz et aL, 1997b). We selected the linear programming approach because of its considerable success in helping to understand herbivore foraging
behavior (Belovsky and Schmitz, 1994). Multiobjective programming has. been applied to problems related to the management of wildlife (e.g., Hof and Raphael, 1992; Mendoza,
1988), but it has not been applied to animal foraging behavior
before the study of Schmitz et aL (1997b).
The first step in the formulation of both models is to identify the physical and physiological constraints that limit daily
consumption of grasses and forbs. As with many herbivore
species (Belovsky and Schmitz, 1991,1994), grasshoppers are
potentially constrained by three important factors: digestive
capacity, daily feeding time, and minimum energy requirements. These foraging constraints can be stated mathematically as:
(la)
V s + «f*f:
(lb)
T,
METHODS
StndySite
The study was conducted during 1994 through 1996 at the
'Ale-Myers Research Forest in northeastern Connecticut, USA,
near the town of Union. The research location is a 3240-ha
northeastern hardwood ecosystem interspersed with old
fields. The old-field sites have a variety of grass and forb spedes, the most abundant being Solidago rugosa, Solidago graminifolia, Erigeron annuus,
Trifolium Ttpms, AsUr
novttangUae, Daucus canto, Phltum prattnst, and Poa pratensis. Our focal spedes for this study, the herbivore grasshopper
Mdanophu fmurrubrum, is common in this system. The most
common arthropod predaton include wolf spiden (Lycosidat)
and nursery web spiders (Pisuridat). A complete description
of the study site is presented in Schmitz et aL (1997a).
Model construction
Our foraging models predict how a generalist grasshopper,
Mttanoplus ftmurrubrum, should select its diet under changing levels of predation risk. M. femurrubrum grasshoppers may
consume both grasses and forbs (Heifer, 1987; Vickery and
Kevan, 1967). Feeding trials with M. ftmurrubrum grasshoppers indicated that several spedes of grasses and forbs present
in the old-field community were edible. We aggregate all edible spedes of plants into two groups: grasses and forbs. We
do this for two reasons. First, these two resource types are
patently distributed relative to each other in die field, which
has an important bearing on grasshoppers' search behavior
(discussed below). Second, the net nutritional content and
the cropping rates for grasshoppers of plants within these
groups, as measured through feeding trials, are similar (Belovsky, 1986a,b; Schmitz et aL, 1997a). The model formulation
could be easily adjusted to treat each plant spedes individually
by adding variables to represent each spedes. The solution
techniques would remain unchanged.
The goal of this study was to determine whether grasshoppers adaptively balance multiple, variable, conflicting demands. We used a multiobjective programming model to predict the foraging strategies representing the adaptive balance
of multiple demands. For comparison, we also formulated a
single-objective model to predict how grasshoppers would forage if they instead considered foraging demands individually.
Both models are based on the linear programming technique
where 4 is the energy content of the tth food (•' =• g for grass,
» » f for forbs), E-ia the daily minimum energy intake, b, is
the wet mass/ dry mass ratio for the ith food, D is the digestive
capacity of the grasshopper (calculated as the product of the
turnover rate and the crop volume), c, is die cropping time
for tile tth food, and T is the maximum time available for
feeding. The two dependent model variables are Xp the daily
dry-mass grass consumption, and x,, the dairy dry-mass forbs
consumption. The form of the time constraint (Equation lc)
assumes that grasshoppers in this field system exhibit a spatial
nonsimultaneous search pattern for grasses and forbs {stnsu
Belovsky et aL, 1989). The grasses and forbs are patchily distributed relative to each other, so that grasshoppers can
search only for one food type at a time. Together, these three
constraints bound the set of feasible foraging strategies. An
example of the feasible set of foraging strategies for the M.
ftmurrubrum grasshoppers is provided in the next section,
based on parameter values measured in our field system.
The next step in the construction of both the single objective and the multiple objective foraging models is to identify
the potential foraging objectives. Previous work with grasshoppers (Belovsky, 1986b) indicates that in the absence of predation risk, grasshoppers attempt to ma^imm- their daily energy intake. This foraging goal is an appropriate surrogate for
fitness, as nutritional status has effects on development, fecundity, and mortality (Bernays and Simpson, 1990). Because
of the direct fitness benefits derived from predator avoidance,
we assume that grasshopper feeding may also be influenced
by vigilance. These two foraging demands can be stated mathematically at
max Z,(x) - « f x f + etx,,
(2a)
max Z,(x) = T - (e,x f +
(2b)
where Z, is the energy consumed per day, Z, is the daily time
available for vigilant behavior, and the other parameters are
defined as above for Equations l a - l c Because T is a constant,
Equation 2b could be replaced with an equivalent statement:
min Z,(x)
(3)
where thii equation represents the more familiar objective to
minimize the time spent feeding (Schoener, 1971). The two
behavioral objectives, Z, and Z* conflict as time spent feeding
reduces the time available for vigilance.
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
then can be used to design new experiments that quantify the
exact fitness consequences of trade-off behavior (Real, 1987;
Schmitz et al., 1997b).
We report here on field experiments that examined the
classic problem of foraging to balance energy gain for survival
and growth with the avoidance of predaton (lima, 1985; Ludwig and Rowe, 1990; Mangel and Clark, 1986; McNamara and
Houston, 1987). We placed old-field grasshoppers under different levels of predation risk. Their foraging behavior was
represented with a multiobjective model that explicitly considered the trade-off between nutrient gain and predation risk,
parameterized with field data. A single-objective model was
also created to farilitai^ the development and interpretation
of the multiobjective model. We found that the grasshoppers
altered their diet choices in response to increased levels of
predation risk. Multiobjective programming analysis revealed
that this change in behavior may reflect the grasshoppers'
varying relative preference for nutrient gain and predator
avoidance, even though the animals were not constrained to
do so under increased risk.
Rothley et al • Adaptive foraging
553
pTSflnftcrTialkMi
Parameter values for die constraint equations (Equations l a ic) and die objective equations (Equations 2a and 2b), were
obtained by field studies and from die literature. For our field
studies, we used grasshoppers of varying sizes to allow for tests
of die sensitivity of die models' predictions to grasshopper
body size.
W" (A) (X s )
(4)
where W is die cropping time, X is die length of die grasshopper, and A and B are constants to obtain an equation relating body length to cropping time for both grasses and
forbs.
We calculated die maximum time available for feeding
based on estimates of daily activity time. Activity time is assumed to represent maximum daily feeding time because activity time appears to be limited by die diermal environment
(Belovsky and Slade, 1986). A SO-m transect across die field
was traversed every SO min over a 12.5-h period. While moving
across die transect, each M. ftmurrubrum grasshopper ob-
*-5
Variable Value
Cropping time
Grasses
Forbs
<i
While this is only a rough method for estimating die maximum available daily feeding time, it has been calibrated with
detailed time budget measures for a host of species (Belovsky
and Slade, 1986). Moreover, die results were comparable to
those from a companion study designed to estimate feeding
time in enclosed terrariums (Schmitz et al., 1997a). The maximum daily feeding time estimated in our field system was
much lower than .die feeding time realized for grasshoppers
in a prairie environment (Belovsky and Slade, 1986). We discuss later die sensitivity of our results to thii estimate.
Dtgestxvt constraint
Grasshoppers' crop volumes vary significandy with body size.
Therefore, we collected 50 grasshoppers from die field, measured their length, and removed and weighed dieir crops (including contents) on an electronic balance. To estimate maximum crop volume, only die data from die heaviest 15% of
die crops for each body length were retained. A nonlinear
regression similar in form to Equation 4, where W is die wetmass crop weight, X is die length of die grasshopper, and A
and B are constants, was used to obtain an equation relating
body length to crop volume.
The wet mass/dry mass ratios for grasses and forbs, \ and
br, and die crop turnover rates of grasshoppers were obtained
from die literature (Belovsky, 1986b). These values were assumed to be reasonable estimates for die true values of our
study system.
Source
h/g-dry
Field experiment
1.64
2.67
g-wet/g-dry
Belovsky (1986b)
7.04
9.76
kj/g-dry
Belovsky (1986b)
*
g-wet/ turnover
turnovers/day
g-wet/day
h/day
kj/day
Field experiment
Bekmky (1986b)
D
T
E
0.05
4.09
Oil
4.40
0.15
Bulk ratio
Grate*
Forbf
Energy content
Grasses
Forbs
Crop volume
Crop turnover rate
Digestive capacity
Time available for feeding
Energy requirements
10.93
12.05
(5)
(6)
Units
<f
25,
where fa is die percentage of SO-min period, t, diat grasshoppers can be active, n, is die number of grasshoppers observed
during t, and N is the highest number of grasshoppers observed during any SO-min period. An estimate of the daily
maximum time available for feeding (in min/day) was calculated as
IWblel
Parameter value* for a 26.1-mm grasshopper
Parameter
'•••
Field experiment
Belovsky (1986b)
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
Tfu tiwu constraint
Cropping time, <Land c,, was assumed to vary with body size
and forage type. Therefore, we ran feeding trials with grasshoppers to measure cropping times for grasses and forbs independently. In each feeding trial, a single grasshopper was
starved overnight, measured in length, and placed in a 1-1
glass jar. A fresh plant sample was traced on a piece of graph
paper and then placed in die jar widi die grasshopper. If die
grasshopper fed, we timed die length of die foraging bout A
foraging bout was defined as a continuous interval of food
intake. A bout was considered completed when SO s had
elapsed with no food intake. Foraging bouts ranged from SO
i to 52 min. The plant sample was dien retrieved and retraced
on die graph paper. We determined die area of plant material
consumed by comparing die two tracings.
We calibrated die area of die tracings to a dry mass measure. For each plant species, plant samples were traced on
graph paper, dried at 60*C for 48 h, and then weighed to
obtain an estimate of die dry mass per unit area. We used
these plant data to convert the area of plant material consumed in die feeding trials to dry-mass values. A ratio of die
length of die feeding bout versus dry-mass consumed during
die bout was dien calculated for each feeding trial. We used
a nonlinear regression to fit die allometric function:
served to jump out of die way was recorded. An estimate of
die percentage of each SO-min period that die grasshoppers
could be considered active was calculated as (Belovsky and
Slade, 1986):
554
Behavioral Ecology VoL 8 No. 5
a.
Feasible foraging strategies
AB
CD
EF
Digestive constraint
Energy constraint
Time constraint
Nondominated diets
b.
Feasible objective combinations
Nondominated
strategies
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900
Energy intake [KJ/day]
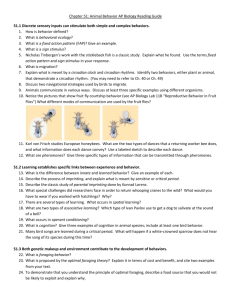
Figure 1
Example of the graphical representation of the feasible set of foraging strategies for a 26.1-mm grasshopper, (a) Feasible strategies graphed
with respect to the grasshoppers' potential resources: grass (xj and forbs (i,). Point A indicates the energy-maximizing diet of 100% grass.
Point C indicates the vigilance-maximizing diet of 100% forbs. The arrow indicates the shift from an energy maximizing diet of 100% grass
to a mixed diet (gnuse* and forbs) as the grasshoppers' perceived level of predation risk increases. The darkened border running from A
through B to C Indicates the feeding strategies corresponding to the nondominated set. (b) Feasible strategies graphed with respect to the
foraging objectives: energy intake (Z,) and vigilance (2^). Point A indicates die energy-maximizing strategy, corresponding to a diet of 100%
grass in panel a. Point C indicates the vigilance maximizing strategy, corresponding to a diet of 100% forbs in panel a. The nondominated
set is denoted by the darkened border running from A through B to C The arrow indicates a shift from a strategy that favors energy intake
toward a strategy that increasingly favors vigilance as the grasshoppers' perceived level of predation risk increases.
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
•mass grass consumption [g-dry/day]
Rowley et aL • Adaptive foraging
555
IWUeZ
Diets and objective values for the labeled pointa of the feaafiile act
for • Z&l-mm grasshopper
3
Objective values
. J
I J
V
Diet (g-ary/aay;
Point
x,, gran x* forbs
A
B
C
D
0.13
0.00
0.00
0.02
0.40
0.00
E
F
0.00
0.08
0.02
0.00
0.00
0.37
Z\, energy
(kj/day)
Zf, vigilance
(h/day)
0.90
0.76
0.15
0.15
Infeastble
Infeaiible
3.01
3.46
4^1
4.17
Infeaiible
Infeaiible
100%
T
I
I
J
Oft
£
b.
1
1
twotfUm
C.
Model predictions
SingU-obftctiv* linear programming model
The range of feasible foraging strategies, defined by die constraints (Equations la-lc), can be represented graphically by
plotting die foraging constraints as lines on a two-dimensional
graph using die decision variables, Xj and x,, as die axes (Figure la). The graph shown was constructed using die parameter values for an average-length grasshopper (x •» 26.1 ±
0.61 mm, n - 42). While die exact solution varies, the qualitative shape is similar for all grasshopper body lengths widiin
die range studied. The shaded region (including die line segments bounding die shaded region) indicates the set of feasible feeding choices. Based on this figure, a grasshopper diet
may consist of grass only (Figure la, tine AD), forbs only (Figure la, tine BQ, or any intermediate combination (Figure la,
all other points in die feasible set). Note that die time constraint (Equation lc; Figure la, tine EF) does not intersect die
digestive constraint (Equation lb) as it does in most previous
linear programming model solutions (Belovsky and Schmitz,
1994). Thus, die time constraint will not determine die optimum; Le. diere is a surplus of time available to feed.
A single-objective linear program representing die grasshoppers' foraging choice to balance die trade-off of die potential foraging objectives of maximizing energy intake and
ma-rimiTHng vigilance (Equations 2a and 2b) was solved using
LINDO (UNDO Systems, Inc., 1995). The energy-maximizing
solution is a diet of 100% grass (Figure la, point A). The
vigilance-maximizing solution is a diet of 100% forbs (Figure
la, point C). It is noteworthy that this model never predicts
that die optimal strategy is a mixed diet (both grasses and
forbs). These results, as well as die objective values, Z, and Z*,
for these diets are summarized in Table 2. Note that all diets
"above" line AB, die digestive constraint, (e.g., Figure la,
points E and F) are infeasible.
Our predictions for die single objective model are that in
the absence of predation risk, grasshoppers should select a
diet composed entirety of grass (Figure 2a). As predation risk
increases, die grasshoppers may switch to a diet composed
entirely of forbs (Figure 2a). Because die time constraint does
0.00
• spfckr
twoqtidtn
Figure X
A graphical representation of the predicted and observed diets for
the grasshoppers, (a) Predictions of the single-objective foraging
model. In the absence of predators, the grasshoppers are predicted
to choose a diet of 100% grass. As the level of predatkm risk
increases, the grasshopper! are predicted to switch to a diet of
100% forbs (0% grass.) (b) Predictions of the multiobjecthre model.
Grasshoppers foraging in the absence of predadon are predicted to
have the diet that is most highly composed of grass. As the level of
predadon risk increases, the amount of grass in the grasshoppers'
diet is predicted to decrease, (c) Observed diets of the
grasshoppers. Error bars indicate Set.
not intersect the feasible region, both the energy-maximizing
and vigilance-maximizing solutions lie on the single-diet axes.
Even if die time available for feeding were decreased by 50%,
the time constraint would still not intersect the feasible region. In a companion study designed to estimate feeding time
under predation risk in enclosed terrariums (see Schmitz et
aL, 1997a), the maximum observed reduction in time spent
feeding was only 18%. Thus, observed time budget changes
in the time available for feeding grasshoppers under predation risk do not change die predictions of the single objective
model.
MuiHobjtctiv* linear programming model
For a multiobjective model, the grasshoppers' foraging objectives are not treated as stria alternatives, but instead as the
endpoino of a continuum. Foragers are not restricted to
switching between single-objective diets; instead, it is assumed
that foragers use some intermediate weighted combination of
the objectives. Further, foragers' relative preferences for the
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
Energy constraint
The energy content for grasses and forbs, ^ and a,, and the
energetic requirements of the grasshoppers were obtained
from the literature (Belovsky, 1986b). These values were assumed to be reasonable estimates for die true values of our
study system. Energy requirements are expected to vary with
body size, but this parameter did not change the qualitative
predictions of the models and so was not explicitly measured.
The parameter values based on the average body length
grasshopper used in our experiments (x — 26.1 ± 0.61 mm,
n •* 42) are summarized in Table 1.
Behavioral Ecology VoL 8 No. 5
556
Table 4
Obwrred diets
Table 3
s
Treatment code
No. of
grasshoppers
No. of
spiders
Control
Zero spiders
One spider
Two spiders
0
3
3
3
0
0
1
2
We use this set of adaptive trade-off strategies as die basis
for our predictions. In die absence of perceived predation
risk, grasshoppers will eat die diet that yields die highest level
of energy. Again, this corresponds to a diet toward 100% grass
(Figure la, point A). However, as die level of perceived predation risk increases, grasshoppers use a diet that increasingly
favors die vigilance maTimiTing objective. This changing relative preference for die objectives corresponds to a shift along
die set of adaptive trade-off solutions toward die vigilancemaximizing solution (indicated by die arrow on Figure lb.)
In terms of feeding strategy, diis shift translates to an increase
in die percentage of die diet composed of forbs (indicated by
arrow in Figure la). For our experiments, grasshoppers in the
absence of predators should exhibit die highest daily intake
of grass. As predation risk increases, grasshoppers should exhibit a decline in die amount of grass in dieir diet (Figure
2b). Note that in tile multiobjective framework, we cannot
predict diat die grasshoppers will consume die energy-maximizing diet (100% grass) in die absence of predators. This
would require die assumption that in die absence of predators, grasshoppers forego all vigilant behavior in favor of feed-
Z*
Treatment
*r& nss
Xff forbs
(kj/day)
vigilance
(h/day)
Zero spiders
One spider
I wo ipiden
0.07
0.04
0.02
0.03
0.05
0.01
0.79
0.77
0.24
3.27
3.36
4.06
ing. Instead, we make a more modest assumption that grasshoppers will have their lowest preference for vigilance in die
absence of predators.
We conducted a field experiment widi adult M. fnmtrrubrum
grasshoppers and hunting wolf spiders (Lycosidtu) to evaluate
die predictions of die single-objective and multiobjective models. Populations of grasshoppers and spiders were stocked into
standard aluminum experimental cages placed in an old field
(see Schmitz et aL, 1997a). The cages were 1 m tall and enclosed a basal area of 0.25 m1. The cages were placed over
natural vegetation in randomized block experimental design;
seven blocks, four cages per block. The plant species distribution in die field was highly heterogeneous such that grasses
and forbs were present in all cages. We randomly assigned 4
experimental treatments to the 28 cages (Table 3). These
treatments were designed to establish a broad range of predation risk ranging from predator-free foraging to intense
predation risk: A control treatment, with no grasshoppers or
spiders, was used to determine die plant abundance in die
absence of herbivory.
Grasshoppers and spiders were introduced to die cages during a single morning. The cages were then left undisturbed
for 10 days. After this time, all grasshoppers in die cages were
counted (to determine die remaining population size in each
cage), removed, and stored in 70% ethyl alcohol, and all edible (green) vegetation was dipped, sorted, and dried at 60°C
for 48 h.
RESULTS
Analysis of variance indicated that die treatments had a significant effect (£<.O5) on die final dry mass of die grass. By
calculating die difference between die final dry mass of die
plants in the cages containing grasshoppers and die final dry
mass of die plants in the control cages within each block, we
estimated the total consumption by the grasshoppers in each
cage. This consumption estimate was then divided by the
number of grasshoppers per cage and the time duration of
the experiment to calculate the daily per capita consumption
(Figure 2c). There was a significant difference (/K.05) in the
per capita consumption between the treatments.
We used the daily per capita grass and forbs consumption
estimates to evaluate die performance of die foraging models.
First, comparing the qualitative trends in die predicted and
observed grass consumption (Figure 2a—c), die observed foraging patterns are clearly more «imilar to die predictions of
die multiobjective model. The single-objective model predicted that in Ae absoaao of risk, the grasshoppers should consume a 100% grass diet, and as predation risk increased, die
grasshoppers should switch to a 100% forb diet. But in all
cages, the grasshoppers were consuming a mixed (grass and
forbs) diet The total remaining grass in die zero-spider
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
objectives may change under different environmental conditions. Multiobjective linear programming analysis is used to
identify this continuum of feeding strategies that represent
adaptive trade-offs between the objectives.
The objective equations, Equations 2a and 2b, are used to
calculate the feasible combinations of objective levels that correspond to the feasible foraging strategies. For example, Table
2 gives the diet (x. and Xf combination) and the corresponding objective function values (Z, and Z, combination) for die
labeled points on Figure la. The feasible set of objective vahie
combinations can be plotted on a graph using the objectives,
Z, and Zj, as the axes (Figure lb). Note the relationship between Figures la and lb. Point A on Figure la indicates the
feeding strategy that yields the combination of objectives values shown by point A in Figure lb.
It is with this representation that we gain new insight regarding the optimal compromise solutions and can examine
the tradeoffs in different fitness components, measured in
different currencies, in the same analysis. We can quickly
identify borders AB and BC (darkened on Figure lb) as die
continuum of intermediate strategies representing die adaptive compromise solutions to the energy intake-risk avoidance
trade-off. The foraging strategies corresponding to these solutions are indicated by the darkened borders on Figure la.
These solutions are said to be nondominated: for each diet
within < this set, there is no other feasible diet that increases
the amount of one objective (e.g., increased vigilant behavior)
without giving a lower level of the other objective (reduced
energy intake) (Schmitz et aL, 1997b). Animals that feed
adaptiveh/ would be expected to choose diets only from this
continuum. This analysis also yields an explicit quantification
of the trade-off between die objectives. For foraging strategies
along the AB border, the trade-off between time available for
vigilance and energy intake is 3.2 h/kj. For foraging strategies
along die BC border, the trade-off is 1.2 hAJ-
Objective values
Diet (g-dry/day)
Rothley et al • Adaptive foraging
557
a.
Feasible foraging strategies
Digestive constraint
Energy constraint
Nondominated strategies
S
b.
Feasible objective combinations
i
4.40 -I
c
4.20
4.00
o 3.80
8 3.60
3.40
3.20
-
1
I
J.UU
T
t
1
0.00
0.20
0.40
1
a
>
P ^ ^ t w o spiders
D ^ ^ ^ ^ ^ _
——
Nondominated strategies
B
[^one spider
^ ^ ^ z e r o spiders
1
0.60
0.80
^Ts¥
A
1
1.00
Energy intake [KJ/day]
Figure 3
Graphical comparison of the observed grasshopper diets (for the zero-spider, one-spider, and two-tpider treatments) and the predicted set of
feasible and optimal strategies, (a) Observed diets graphed with respect to the potential food resources. No observed diet is dose to any of
the predictions of the tingle-objective model [100% grass (point A) or 100% forbs (point B)]. Instead, the zero-spider and one-spider diets
appear to rail dose to the nondominated strategies predicted by the muldobjective modeL In this representation, the two-spider diet appears
suboptimaL (b) Observed diets graphed with respect to the foraging objectives. In this representation, all observed diets fall dose to the
nondominated strategies as predicted by the muldobjective modeL This graph also allows the biological interpretation of die results. In the
absence of predators, the grasshoppers chose a strategy that most heavily favored energy intake. When a single spider was present, the
grasshoppers chose a strategy that more heavily favored vigilance. When two spiders were present, the grasshoppers chose a strategy that
most heavily favored vigilance.
^ 1 ) , one-spider (p = .OS, removal of a single outlier due
to spatial variability in grass abundance), and two-spider (p »
.04, removal of a single outlier due to spatial variability in
grass abundance) cages was significantly lower than the total
remaining grass in the control cages (Student's t test for
paired data, one tailed) .When compared to the total remain-
ing forbs in the control cages, the total remaining forbs in
the zero-spider (p " .08, removal of a single outlier due to
spatial variability in forb abundance), one-spider (p » .08),
and two-spider (p " .13, removal of a single outlier due to
spatial variability in forb abundance) cages was significantly
lower (Student's ttest for paired data, one tailed). The mui-
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
0.05
0.1
0.15
Daily dry-mass grass consumption [g-dry/day]
Behavioral Ecology Vol. 8 Mo. 5
558
DISCUSSION
Our experiments suggest diat animals have die ability to optimally balance multiple foraging influences. As die relative
importance of diese influences changes, animah are able to
adjust dieir foraging strategy, consistent widi die predictions
of an optimization framework. Hence, variation in foraging
strategy may be consistent widi optimal behavior.
The problem of optimal trade-offs between multiple, conflicting objectives has been explored previously through modeling efforts in behavioral and evolutionary ecology. The standard approach has been to combine mathematical terms diat
represent die individual fitness components or objectives
(e.g., energy intake, time devoted to feeding) into a single
fitness equation to approximate a single decision-making goal
(objective). While we do not question diat tiiere may indeed
be a single function of die individual fitness objectives diat
accurately captures an animal's foraging objective, there are
several difficulties widi diis approach. First, die form of die
objective function must be assumed. Specifically, it must be
dedded a priori whedier terms should be combined linearly
or nonlinearfy and whedier scalar multipliers (weights) are
required to appropriately combine die terms. This may be
extremely difficult given die multitude and complexity of potential inputs. Second, all fitness components must be converted into a common currency before mey can be madiematicaDy combined. Again, diis may be difficult given die
complexity of fitness.
Multiobjective programming analysis can simplify die model formulation of trade-off behavior and die interpretation of
empirical data. The trade-off between objectives can be quantified widiout die conversion of die objectives into some common currency. There is no need to assume animals' relative
preferences for die objectives a priori because tiiere is no
need to create a fitness function. Multiobjective programming
analysis predicts die range of foraging strategies diat represent die optimal compromise between multiple, variable foraging demands. Empirical information **^" be compared to
diese predictions to determine animal«' preferences for die
demands under different foraging environments. The tradeoff between die objectives can be explicitly quantified. Finally,
by representing die objectives in their inherent currency, we
can interpret behavioral strategies according to dieir biological significance.
In our experiments, we did not test for variations in foraging strategies between males and females. Considerable evidence demonstrates diat males and females may have significantly different foraging strategies (e.g., Qutton-Brock et aL,
1982). Because of die extreme sexual dimorphism exhibited
by die M. ftmurrubrum grasshoppers in our study, (x^ •= 22.3
± 0.50 mm, n =» 19; x, - 29.2 ± 0.47 mm, n = 23), it may
be expected diat males and females may have different preferences for die foraging objectives. A companion study
showed diat males and females may indeed have a differential
susceptibility to predation as a result of die difference in body
size (Schmitz et aL, 1997a). It would be interesting to repeat
diese experiments in a manner such diat die variations in
foraging strategy between die sexes could be investigated.
We thank A. Beckerman, K. Johnson, S. Koenig, M. Mangel, D. Skelly,
and two anonymous reviewer* for extremely helpful suggestion! and
comments. Financial support was provided by Sigma Xi and Weyerhaeuser fellowships to K.D.R. and by National Science Foundation
grant DEB-9508604 to O.J.S.
REFERENCES
Belovsky GE, 1986a. Generalist herbivore foraging and its role in competitive interactions. Am Zool 26:51-69.
Belovsky GE, 1986b. Optimal foraging and community structure: Implications for a guild of generalist grassland herbivores. Oecologia
70J5-62.
Belovsky GE, Ritchie ME, Moorehead J, 1989. Foraging in complex
environments: when prey availability varies over space and time.
Theor Popul Biol 36:144-160.
Belovsky GE, Schmitz OJ, 1991. Mammalian herbivore optimal foraging and the role of plant defenses. In: Plant defenses against
mammalian herbivores (Palo KT, Robbins CT, eds). Boca Raton.
Florida: CRC Press; 1-27.
Belovsky GE, Schmitz OJ, 1994. Plant defenses and optimal foraging
by mammaHan hCTDivOieS. J Mamma) 75: 816-832.
Belovsky GE, Slade JB, 1986. Tune budgets of grassland herbivores:
body size similarities. Oecologia 7O.5S-62.
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
tiobjective model predicted a decrease in the percentage of
the diet composed of grass with increasing predation risk. The
trends in daily consumption of grass by the grasshoppers
match this prediction.
Second, comparing the quantitative predictions of the single-objective and multiobjective models to the observed diets,
the observed diets are dearly more similar to the predictions
of the multiobjective modeL We plotted the average per capita
consumption of grass and forbs for each treatment (Table 4)
using the protocol described above (figure 5a, feasible region
enlarged for clarity). The objective equations. Equations 2a
and 2b, were used to transform the diet values into the currencies of die objectives (Table 4). These objective-level values
were then plotted in relation to the nondominated set of objective combinations (Figure Sb). Looking first at Figure 3a,
the average diets are all part of me set of feasible diet combinations. No observed diet is dose to any of die predictions
of die single objective model [100% grass (Figure 5a, point
A) or 100% forbs (Figure 5a, point B)]. Tn«tM<4 the zerospider and one-spider diets appear to fall dose to die nondominated strategies predicted by die muldobjecdve modeL
But die average two-spider diet is not obviously dose to any
part of die nondominated set. This discrepancy could be explained as die stochastic result of die large variability in forb
abundance or as deterministic suboptimal behavior. There is
no obvious way to determine whether either of diese interpretations is correct, nor can we ascribe biological significance
to any of diese results.
However, die plot of observed diets graphed widi respect
to die objective values (Figure 3b) yields considerable new
insight. The grasshoppers feeding in die absence of predators
chose die diet that most favors die maximization of energy
relative to die odier treatments. The grasshoppers in die onespider cages chose a diet that provides an intermediate balance of vigilance and energy intake relative to die other treatments. The grasshoppers in die cages with die highest predation risk chose an average diet that most heavily favors vigilance over energy intake. Viewed in diis representation, die
grasshoppers appear to be trading off between energy and
vigilance. The proximity of die predicted diets to die nondominated set suggests tiiat die grasshoppers are performing
diis trade-off optimally. The discrepancy between die two-spider cage diets and die predicted optimal diets (die nondominated set as represented in Figure 3a) is not so nearly exaggerated in diis representation (compare die two-spider diet
points in Figure 3a and b.) In other words, diis apparently
suboptimal behavior has minimal consequences with respect
to die attainment of die behavioral objectives. The average
diets for all treatments may then be consistent widi optimal
foraging. These experimental results suggest tiiat both energy
intake and predation risk are operational factors affecting
grasshoppers' foraging and diat grasshoppers are balancing
diese conflicting demands.
Rothley et aL • Adaptive foraging
McNamara JM, Houston AI, 1987. Starvation and predation as factors
limiting population size. Ecology 68:1515-1519.
McNamara JM, Houston AI, 1994. The effect of a change in foraging
options on intake rate and predation rate. Am Nat 144.-978-1000.
McNamara JM, Houston AL 1996. State-dependent life histories. Nature 380-.215-221.
Mendoza GA, 1988. A muhiobjective programming framework for integrating timber and wildlife management. Environ Manage 12:
163-171.
Real L, 1987. Objective benefit verses subjective perception in die
theory of risk sensitive foraging. Am Nat 130J99—411.
Schhiter D, 1981. Does die theory of optimal diets apply in complex
environments? Am Nat 118:139-147.
Schmitz OJ, Beckerman AP, O'Brien KM. 1997a. BehavionQy induced
trophk i-^nAe*- die effect of predation risk on food web interactions. Ecology (in press).
Schmitz OJ, Cohon JL, Rothley KD, Beckerman AP, 1997b. Reconciling variability and optimal behavior using multiple criteria in optimization models. Evol Ecol (in press).
Schoener TW, 1971. Theory of feeding strategies. Annu Rev Ecol Syst
£369-403.
Sih A, 1980. Optimal behavior can foragers balance two conflicting
demands? Science 210: 1041-1043.
Sih A, Gleeson SK, 1995. A limits-oriented approach to evolutionary
ecology. Trends Evol Ecol 10-.378-381.
Steams SC, 1993. The evolution of life histories. Oxford: Oxford University Press.
Vickery VR, Kevan DEMcE, 1967. Records of the orthopteroid insects
of Ontario. Proc Entomol Soc Ont 97:13-68.
Ward D, 1992. The role of sadsfidng in foraging theory. Oiko» 63:
312-317.
Werner EE, GiUiam J, 1984. The ontogenetic niche and species interactions in size-structured populations. Annu Rev Ecol Syst 15:393425.
Zach R, Smith JNM, 1981. Optimal foraging in wild birds? In: Foraging behavior: ecological, ethologies! and psychological approaches (Kami! AC, Sargeant TD, eds). New York: Garland STPM; 95113.
Downloaded from http://beheco.oxfordjournals.org/ by guest on September 25, 2012
Bernays EA, Simpson SJ, 1990. Nutrition. In: Biology of graohoppen
(Chapman RF, Joern A, eds). New Tforfc John Wiley and Son*; 105128.
Bouskila A, Bhimstein DTf 1992. Rules of thumb for predadon hazard
.MMmwii prediction* from a dynamic model. Am Nat 139:161176.
Chitton-Brock TH, Guinnesi FE, Albon SD, 1982. Red deer behavior
and ecology of two sexes. Chicago: University of Chicago Press.
Cockbum A, 1991. An introduction to evolutionary ecology. London:
Blackwe 11 Scientific
Heifer JR. 1987. How to know the grasshoppers, crickets, cockroaches
and their allies. New Ybrfc Dover Publications.
Hof JG, n«ph«»i MG, 1992. Some mathematical programming approaches for optimizing timber age-dan distribudons to meet muldspedes wildlife population objectives. Can J Forest Res 23:828834.
Houston AI, McNamara JM, Hutchinson JMC, 1993. General results
concerning the trade-off between gaining energy and avoiding predation. Phil Trans R Soc Lond B 341375-397.
Janetos A. Cole B, 1981. Imperfectly optimal animals. Behav Ecol Sociobiol 9-.203-210.
Lima ST . 1985. Maximizing feeding efficiency and tpipitniTing time
exposed to predators: a trade-off in die black-capped chickadee.
Oecologia 6&60-67.
Lima SL. Dill LM, 1990. Behavioral decisions made under die risk of
predation: a review and prospectus. Can J Zool 68:619-640.
Ludwig D, Rowe L, 1990. Life history strategies for energy gain and
predator avoidance under time constraints. Am Nat 135:686-707.
Mangel M, dark CW, 1986. Toward a unified foraging theory. Ecology
67:1127-1138.
Mangel M. Clark CW, 1988. Dynamic modeling in behavioral ecology.
Princeton, New Jersey: Princeton University Press.
Mangel M, Ludwig D, 1992. Definition and evaluation of die fitness
of behavioral and developmental programs. Annu Rev Ecol Syst 23:
507-536.
McNamara JM, Houston AI, 1986. The common currency for behavioral decisions. Am Nat 127:358-378.
559