Localized Structures in the Multi-dimensional Swift–Hohenberg Equation
advertisement

Localized Structures in the Multi-dimensional
Swift–Hohenberg Equation
by
Scott Gregory McCalla
B.A., Cornell University; Ithaca, NY,
Sc.M., Brown University; Providence, RI,
A dissertation submitted in partial fulfillment of the
requirements for the degree of Doctor of Philosophy
in The Division of Applied Mathematics at Brown University
PROVIDENCE, RHODE ISLAND
May 2011
c Copyright 2011 by Scott Gregory McCalla
This dissertation by Scott Gregory McCalla is accepted in its present form
by The Division of Applied Mathematics as satisfying the
dissertation requirement for the degree of Doctor of Philosophy.
Date
Björn Sandstede, Ph.D., Advisor
Recommended to the Graduate Council
Date
John Mallet–Paret, Ph.D., Reader
Date
Arnd Scheel, Ph.D., Reader
Approved by the Graduate Council
Date
Peter Weber, Ph.D., Dean of the Graduate School
iii
Vitae
Professional Preparation
Cornell University
Mathematics and Physics
B.A. cum laude, 2005
Brown University
Applied Mathematics
Sc.M., 2007
Brown University
Applied Mathematics
Ph.D., expected 2011
Appointments
Research Assistant, Brown University
Summer 2009 - Present
Teaching Assistant, Brown University
Spring 2009
Coline M. Makepeace Fellow, Brown University
Fall 2007 - Spring 2008
Teaching Assistant, Brown University
Spring 2007
Research Assistant, Los Alamos National Laboratory
Spring 2000- Summer 2008
Publications
McCalla, S.G., B. Sandstede. Snaking of radial solutions of the multi-dimensional SwiftHohenberg equation: a numerical study. Physica D, 239, 1581-1592 (2010).
Lestone, J.P., S.G. McCalla. Statistical Model of Heavy-Ion Fusion-Fission Reac- tions.
Phys. Rev. C, 79, 044611 (2009).
McCalla, S.G., J.P. Lestone. Fission Decay Widths for Heavy-Ion Fusion-Fission Reactions. Phys. Rev. Lett., 101, 032702 (2008).
iv
Minisymposium Organization
Organizing minisymposium on“Multi-dimensional Localized Patterns” for the SIAM Conference on Applications of Dynamical Systems (DS11) with David Lloyd of the University
of Surrey.
Presentations
Localized structures in the multi-dimensional Swift-Hohenberg equation (invited minisymposium talk)
SIAM Conference on Nonlinear Waves and Coherent Structures (NW10), Philadelphia,
2010
Radial solutions and the cessation of snaking for the multi-dimensional Swift–Hohenberg
equation (contributed talk)
8th AIMS Conference on Dynamical Systems, Differential Equations and Applications,
Dresden University of Technology, 2010.
Radial solutions and the cessation of snaking for the multi-dimensional Swift-Hohenberg
equation (invited talk)
BU/Brown PDE Seminar, Boston University, 2010.
Radial solutions and the cessation of snaking for the multi-dimensional Swift–Hohenberg
equation (contributed talk)
Applied Math Days, Rensselaer Polytechnic Institute, 2010.
Statistical model calculations of heavy-ion induced fusion-fission reactions (poster)
Student Symposium, Los Alamos National Laboratory, 2006.
Statistical model calculations of heavy-ion induced fusion-fission reactions (invited talk)
T-16 (Nuclear Physics Group) Seminar, Los Alamos National Laboratory, 2006.
Statistical model calculations of heavy-ion induced fusion-fission reactions (talk)
American Physical Society April Meeting, Dallas, 2006.
v
Awards
SIAM Student Travel Award, Conference on Nonlinear Waves and Coherent Structures
(NW10), 2010.
Defense Programs Award of Excellence (NNSA), Los Alamos National Laboratory, 2006.
Los Alamos Awards Program (LAAP) Award, Cash Award, Los Alamos National Laboratory, 2006.
Dean’s List, Cornell University.
Teaching Experience and Training
Sheridan Teaching Certificate I, Brown University, 2010. The Sheridan Center is devoted
to improving the quality of instruction at Brown; this was a year long teacher training
course.
AM65: Essential Statistics, Teaching Assistant, Brown University, Spring 2009
AM36: Methods of Applied Mathematics II, Teaching Assistant, Brown University, Spring
2007
Conferences Attended
Joint SIAM/RSME-SCM-SEMA Meeting on Emerging Topics in Dynamical Systems and
Partial Differential Equations, Universitat Politecnica de Catalunya, 2010.
vi
Acknowledgements
Firstly, I want to thank my adviser Björn Sandstede. His guidance and support have been
crucial to my research. He additionally allowed me the freedom to explore on my own and
study a variety of topics. He treated me with respect and understanding.
In addition to Professor Sandstede, I want to thank Professor Mallet–Paret and Professor Scheel for generously donating their time to serve on my committee.
My research advisers at Los Alamos National Laboratory, Karen Hill and John Lestone,
introduced me to scientific research. They were fantastic mentors and are still good friends.
At Brown, I have made many friends among the graduate students, postdocs, staff and
faculty. They have helped me to learn many things from math to barbecuing. In particular,
I would like to thank Peter van Heijster for discussions on both mathematics and soccer.
Hopefully the Dutch will win soon. Thanks also to Sunil Chhita for many shared meals
and coffees.
My family always provided a great environment to grow up in. My brothers’ interests
are far removed from math and their willingness to share these interests with me has kept
me well-rounded. My mom has always been supportive in every way imaginable.
Finally, I would like to thank my wife Stephanie for her unflagging support and encouragement throughout graduate school. She is a wonderful partner and will be a fantastic
mother. I look forward to the future.
Thank you all for your help.
vii
Abstract of “ Localized Structures in the Multi-dimensional Swift–Hohenberg Equation ”
by Scott Gregory McCalla, Ph.D., Brown University, May 2011
This goal of this thesis is to understand patterns in the Swift–Hohenberg equation. The
patterns studied are localized, stationary and radially symmetric in dimensions one through
three. The emphasis is placed on the existence of these structures through numerical
evidence and analytic proofs.
The bifurcation structure of localized stationary radial patterns of the Swift–Hohenberg
equation is explored when a continuous parameter n is varied that corresponds to the underlying space dimension whenever n is an integer. In particular, this numerical investigation
reveals how 1D pulses and 2-pulses are connected to planar spots and rings when n is
increased from 1 to 2. It also elucidates changes in the snaking diagrams of spots when
the dimension is switched from 2 to 3.
A previously unknown spot solution is additionally uncovered. The second half of the
thesis is devoted to rigorously proving this spot’s existence. The amplitude of the spot
exhibits an unexpected scaling as the bifurcation parameter is reduced to zero. The spot
is constructed by gluing two known solutions together, each scaling as the square root of
the bifurcation parameter, but it has a much larger scaling. This behaviour is explained
as a result of the proof.
Contents
Vitae
iv
Acknowledgments
vii
1 Introduction
1
2 Preliminaries
2.1 Variation of constants . . . . . . .
2.2 Resonant terms and normal forms
2.3 Stable manifold theorem . . . . . .
2.4 Roughness theorem for exponential
2.5 Turing bifurcations . . . . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
dichotomies
. . . . . . .
3 Numerical Exploration
3.1 Numerical algorithms . . . . . . . . . . . . .
3.2 Localized 2D states . . . . . . . . . . . . . . .
3.3 The connection between 2D and 3D branches
3.4 The connection between 1D and 2D branches
3.5 Discussion . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8
10
11
12
13
16
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
25
28
33
35
39
4 Existence Near Onset for Spot B in 2D
4.1 Geometry of the rings and spots . . . . . . . . . . . .
4.2 Life at the core . . . . . . . . . . . . . . . . . . . . . .
4.3 Normal forms . . . . . . . . . . . . . . . . . . . . . . .
4.4 The rescaling chart . . . . . . . . . . . . . . . . . . . .
4.5 The transition chart . . . . . . . . . . . . . . . . . . .
4.6 The fixed points . . . . . . . . . . . . . . . . . . . . .
4.7 The formal argument in two dimensions . . . . . . . .
4.8 The flow around the equilibria in the transition chart .
4.8.1 Transversality and the ring: . . . . . . . . . . .
4.8.2 P+ : . . . . . . . . . . . . . . . . . . . . . . . .
4.8.3 Connecting P+ to P− . . . . . . . . . . . . . .
4.8.4 P− : . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
43
45
47
49
52
54
57
58
62
63
66
77
80
viii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4.9 Proof of the main theorem: matching the core . . . . . . . . . . . . . . . . .
4.10 The breakdown of monotonicity . . . . . . . . . . . . . . . . . . . . . . . . .
4.11 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
93
95
5 Conclusion
98
5.1 Summary of main results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.2 Open questions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
A Proofs for Asymptotics
A.1 The general approach . . . . . . . . . . . .
A.2 Decay estimates for the ring in the far field
A.3 Corollaries for different f (s) . . . . . . . . .
A.3.1 Corollary 1: η(ε01 ) . . . . . . . . . .
A.3.2 Corollary 2: c1 (δ− , δ+ ) . . . . . . . .
ix
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
102
103
104
106
106
106
List of Figures
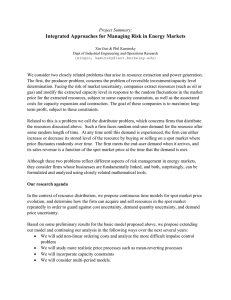
1.1
1.2
1.3
1.4
Desert grass spots and rings from [35]. Gas discharges in [29].
Ferrosoliton from [17]. Hexagons from [31]. . . . . . . . . . .
Patterns from [22]. . . . . . . . . . . . . . . . . . . . . . . . .
The profiles for rings and spots. . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
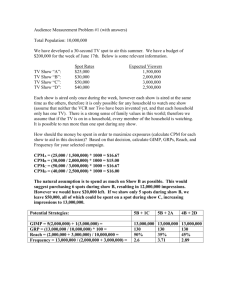
3.1 The center panel contains the bifurcation diagram of 1D localized
pulses. The symmetric profiles that correspond to parameters on the
light-colored curve have a maximum at r = 0 as shown in panels (1),
(2), and (5), while the symmetric profiles corresponding to the darkcolored branch have a minimum at r = 0 as illustrated in panel (3).
As we move up on each branch, a pair of new rolls is added to the solution profile at every other fold bifurcation. The two different branches
discussed above are connected by ladder branches that correspond to
asymmetric profiles as indicated in panels (3)-(5). These asymmetric
structures bifurcate at pitchfork bifurcations near each fold from the
symmetric pulses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Shown are profiles, representative color plots, and bifurcation branches
of localized planar spot A solutions in the top row and of the two
localized planar ring solutions in the bottom row. Profiles and color
plots correspond to solutions at (µ, ν) = (0.005, 1.6). [Reproduced
from [22]]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 The profiles of spots A and B with (µ, ν) = (0.005, 1.6) are compared
in the left panel, while an enlarged plot of spot A is shown separately
in the right panel. Note that spot B resembles an inverted spot A but
with a much larger amplitude. The zeros of both profiles appear to
align well for r 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Shown are the connected bifurcation curve of spot A and one of the
ring solutions in panel (i) and the bifurcation branch of spot B and
the second ring solution in panel (ii). In the upper right corner of
panel (i), the branch oscillates between three folds aligned approximately at µ ≈ 0.18, 0.19, and 0.21, and we refer to the part of the
branch that oscillates between the two rightmost folds as the secondary
snaking structure. Note that the vertical L2r -axes in panels (i)-(ii) are
scaled differently: in particular, the spot A branch reaches a larger
value of the L2r -norm. The solution profiles at the points labelled (a)(d) are shown in Figure 3.5. . . . . . . . . . . . . . . . . . . . . . . .
x
3
4
5
6
22
23
24
29
3.5 Panels (a)-(d) contain the solution profiles of spots and rings at the parameter values labelled (a)-(d) on the branches shown in Figure 3.4. As
the spot and ring branches are traversed towards increasing L2r -norm,
additional rolls are added at the right tail of the localized profiles. The
maximal (minimal) amplitude of spot A (spot B) always occurs at r =
0 along the branch. For rings, u(0; µ) oscillates between positive and
negative values as we move from one leftmost fold to the next on the
branch; new rolls are created only at the tail but not near r = 0. We refer to the movies at
http://www.dam.brown.edu/people/mccalla/SpotAmovie.mpg and
http://www.dam.brown.edu/people/mccalla/SpotBmovie.mpg
for further details on the behavior of spots and rings. . . . . . . . . .
3.6 Panel (i) shows in blue the connected snaking branch of the spot B
and ring B solutions from Figure 3.4(ii) together with a stack of isolas,
plotted in red and alternately in dashed and solid, along which profiles
resemble those of spot B and ring B. Panel (ii) contains the spot A
curve (in dark cyan) and the spot B branch (in blue) from Figure 3.4
together with the stacked isolas (in red) from panel (i). Note that the
isolas align well with the secondary snaking structure visible near the
top of the spot A branch, indicating that that they pinch off from the
spot A branch as n is changed. . . . . . . . . . . . . . . . . . . . . . .
3.7 Shown is the first isola (in green) of a second family of stacked isolas
that appears above the spot A branch (plotted in dark cyan). . . . . .
3.8 The lower parts of both panels contain the connected snaking branch of
spot A and ring A (in dark cyan) from Figure 3.4. Above this branch,
we found a family of stacked isolas (plotted in green) that include the
isola shown in Figure 3.7. The stack of isolas extends only up to a
value of the L2r -norm at which the profiles consist of approximately
38 rolls. Above this value, we found a single connected solution curve
(drawn in brown) that consists of two intertwined branches that both
snake, seemingly indefinitely. For clarity, we show only one of the two
intertwined branches in the upper part of panel (ii). Solution profiles along the upper snaking curve can be found in the accompanying
http://www.dam.brown.edu/people/mccalla/SpotABmovie.mpg. . . .
3.9 The two panels show log-log plots of the two leftmost and two rightmost folds of the high snaking branch shown in Figure 3.8, indicating
that the snaking branch converges algebraically to the Maxwell point
µ = 0.2 of 1D rolls. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.10 Panel (i), reproduced from [22], indicates that the amplitude of spot A
1
scales as µ 2 as µ approaches zero. As shown in panel (ii), the amplitude
of spot B appears to scale approximately like µ0.374 . . . . . . . . . . .
3.11 To delineate the existence region of spot B, we continued spot B in the
parameter ν for several fixed values of µ and visualize the resulting
solution branches in two different ways: in the left panel, we plot
ν versus the squared L2r -norm (the values of µ decrease from right to
left), while the right panel shows log µ versusp
ν. Note that the solution
branches stay above the critical value ν = 27/38 and that the L2r norm of the associated profiles goes to infinity as ν approaches the
lower end of each branch. . . . . . . . . . . . . . . . . . . . . . . . . .
xi
29
30
31
31
33
33
34
3.12 The bifurcation curves of spot A and spot B solutions are presented
in panels (i) and (ii), respectively, for different values of the dimension
parameter n. The insets show the branches for n = 3 in more detail. .
3.13 Panel (i) contains the upper snaking branches of spots for n = 2 (in
brown), n = 2.3 (in cyan), and n = 3 (in black). Panel (ii) contains
the two arms of the snaking branch for n = 3 to illustrate that they
do not overlap. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.14 The two curves plotted in cyan diamonds correspond to the limits at
n = 1 of the lower planar spot A and spot B branches when continued
in n. The profiles along these branches for n = 1 coincide with the
1D pulses shown in Figure 3.1. The solid figure-eight isolas plotted in
red arise when we continue the two ring branches from n = 2 down
to n = 1 using the methods outlined in §3.1. The profiles along each
isola are symmetric 1D 2-pulses. . . . . . . . . . . . . . . . . . . . . .
3.15 The left panel contains the ring A branch for different values of n
plotted in the planar L2r -norm. The curve for n = 1.2 is connected but
clearly shows structures that will pinch off to become individual isolas
for smaller values of n. These isolas continue to form and pinch off as
the dimension is decreased further, thus leading to isolas of 2-pulses
with a given L2r -norm and an arbitrary separation between the pulses.
The right panel shows the ring A branch for n = 1.2 and n = 1.3 but
now plotted in the one-dimensional L2x -norm. Note that the curve for
n = 1.2 appears to cover an entire family of what will later become
separate 2-pulse isolas at n = 1. . . . . . . . . . . . . . . . . . . . . .
3.16 The left panel contains four isolas at n = 1 that are found from the
two planar ring branches through continuation in n. The right panel
contains the solution profiles at the topmost intersection of these isolas
with the line µ = 0.195: the profiles in panels (a)-(b) and B come from
ring A, while the profiles in panels (c)-(d) arise from ring B. Since
these profiles were computed with Neumann boundary conditions at
r = 0, they can be reflected across r = 0 and therefore correspond to
2-pulses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.17 The profiles shown here at n = 1 were found through continuation
from rings. Due to the Neumann conditions imposed at r = 0, these
solutions correspond to symmetric 2-pulses with different separation
distances represented by the number s of small oscillations near r = 0.
3.18 When we continue an asymmetric 1D pulse that is centered some distance away from x = 0 in n, we obtain the isolas in panel (i) which
shrink and eventually disappear. Panel (ii) contains continuation results in (µ, n) of the two upper and lower folds along the isolas. As n
increases, the lower folds disappear in a cusp, thus making the isola
more circular, while the collision of the remaining upper folds corresponds to the point at which the isola disappears. . . . . . . . . . . .
4.1 Spot A versus spot B. . . . . . . . . . . . . . . . . . . . . . . . . . . .
xii
35
35
36
36
37
38
38
45
4.2 The pictured schematic represents the core manifold, the transition
region, and the rescaling chart. The core manifold, at top left, is a
two-dimensional manifold that captures the smooth bounded solutions
within the interval [0, r0 ] for a fixed but finite r0 > 0. The transition
chart, at bottom left, captures the algebraic growth and decay of solutions. The rescaling chart, at right, captures the exponential decay
of solutions as the radius goes to ∞. The blue solid curves represent
spot A and the ring on the left and right respectively. The dashed red
line represents spot B. . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 The solid blue curve for the ring lies in the transverse intersection of
s
cu
W∞
and W−
. We can find starting data near (A+ , z+ ) = (−η, 0) in
s
W∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 A cartoon of the orbit. We are looking for a ring solution that lies in
the invariant plane where α1 = 0 and ε2 = 0. The remainder terms in
both the transition and rescaling chart then drop out and we are left
with (8.1). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
s
4.5 The equilibrium at (z1 , A1 ) = ( 12 , 0) is pictured. A segment of W∞
is drawn in red. By choosing the appropriate point on this manifold,
the matching equations are solved. We need to understand how this
segment is affected by the flow between and around the two equilibria.
s
from the posi4.6 In this cartoon, we display the expected motion of W∞
tive equilibrium backwards in time towards the negative equilibrium. .
s
4.7 Here the full motion of W∞
between P− (on the left) and P+ (on
the right) is shown with the expected linear growth rates around and
between the equilibria. Sections 4.8.2, 4.8.3 and 4.8.4 are equivalent
to stepping across this picture from right to left. . . . . . . . . . . . .
4.8 The radial rescaling is done with γ = 1/2 corresponding to r̃ = εr.
The absolute values of several solutions are plotted for various values
of µ ∈ [0.04, 0.14]. Note the change in amplitude of the extrema as
µ is varied: the amplitude equation can be visualized through these
values. For the largest value of µ, the maximum amplitude is not at the
origin. This is an example of the expected breakdown of monotonicity,
though we are far from the valid range of our calculations. As µ is
decreased, the second largest extremum shrinks while third largest
extremum grows. When µ is made small enough, we expect a shift in
which is largest. This can be seen in figure 4.9. . . . . . . . . . . . . .
4.9 This plot is similar to figure 4.8, only for a value of µ = 0.0059. As is
highlighted by the dashed line, there is now a non-monotonicity in the
amplitude with respect to r. . . . . . . . . . . . . . . . . . . . . . . .
4.10 The amplitude of spot B in three dimensions is shown as a function of
µ. The data is insufficient to fully acquire the scaling: both a linear
scaling and a linear scaling multiplied by a logarithmic term adequately
fit the data. From the formal analysis, we expect the scaling to look
1
like µ 4 (log µ)α for some unknown constant α. . . . . . . . . . . . . . .
xiii
46
59
64
67
78
80
94
94
96
Chapter
One
Introduction
2
Patterns arise constantly in nature. They are structured phenomena that come from some
homogeneous or completely random background. The initial background does not dictate
the final ordered state in any expected fashion. Recently, a great deal of effort has gone into
understanding the formation of these patterns, culling ideas from mathematics, physics,
biology, chemistry and material science. Mode-locked laser systems produce high energy
pulses of light. Spots bundle magnetic field lines in ferromagnetic fluids. Grass spots
and rings develop in deserts where resources are scarce. Hexagon patches form in cooling
lava fields, such as the Giant’s Causeway in Northern Ireland. Oscillons, localized pulses
that fluctuate periodically in time, appear in vertically vibrated trays of sand and clay.
I will concentrate on studying these patterns as solutions to partial differential equations
(PDEs), generally reaction-diffusion systems.
Pattern can refer to many things from a structured solution that approaches a periodic
curve at infinity, to an exponentially localized solution. In reaction-diffusion systems, these
nonhomogenous states are often formed through a Turing, or pattern forming, bifurcation.
These are generally instabilities that arise because of the diffusive terms. Normally diffusion
is thought to stabilize a system, but this is not always the case. The general heuristic behind
this is often described in terms of predator-prey relationships. The predator and prey
densities are expected to diffuse from some initial distribution, but they diffuse at different
rates (assume the prey moves more slowly). Also assume there is some equilibrium state
between the predators and prey where their densities do not change in time. If initially
there is some point where there is an abundance of prey then the predator population will
increase at that region. However, the predators will diffuse quickly away, and the prey
more slowly. This could, if the diffusion of the predator was fast enough, leave a region
where the prey population remained above the equilibrium state. In the surrounding area,
the predator population may have been high enough to further drive the prey below the
equilibrium state as they diffused away. This would lead to a pattern from a system
expected to be stable without diffusion.
These patterns can be stationary, traveling, or oscillatory. The simplest example would
3
193
ecological complexity 4 (2007) 192–200
Vegetation patches [Sheffer et al.]
Figure 1.1: Desert grass spots and rings from [35]. Gas discharges in [29].
2
be a stationary Gaussian profile for a one dimensional system (i.e. u(x, t) = ae−bx ). This
2
2
could also travel, u(x, t) = ae−b(x−ct) , or oscillate, u(x, t) = a sin(ct)e−bx . The profiles
could also be periodic. The next class of patterns consists of a periodic function modulated
Fig. 1 – Ring patterns in nature. (a) Mixture of rings and spots of Poa bulbosa observed in the Northern Negev (250 mm yrS1).
2 (L.) Baker
maritima
(b) A ring of Asphodelus ramosus L. observed in the Negev desert (170 mm yrS1). (c) A ring of Urginea
−c(x−dt)
ramets observed in Wadi Rum, Jordan (50 mm yrS1). Photographs by E. Meron (a) and H. Yizhaq (b and c).
by a localized profile, for example u(x, t) = a sin bxe
. For two dimensional patterns,
things can get more interesting. First, there are spots as seen in figures 1.1, 1.2, and 1.3:
introduced by Gilad et al. (2004, 2007). The model extends
earlier models (Rietkerk et al., 2004) in capturing the non-local
nature of water uptake by plants’ roots, and the augmentation
of the root system in response to biomass growth. The model
has been used to study mechanisms of vegetation pattern
formation and ecosystem engineering along environmental
gradients, addressing in particular the question of resilience to
disturbances (Yizhaq et al., 2005; Gilad et al., 2007). An
extension of the model to plant communities, containing
several vegetation functional groups, has recently been used
to study transitions between competition and facilitation in
woody-herbaceous systems along stress gradients (Gilad et al.,
in press).
competition than those at the circumference of the patch. As
these are radially symmetric patterns,
often
periodic
modulated
by a decaying
a consequence
a ‘‘latent
ring’’, wherefunctions
the biomass density
at
the patch core is smaller than the density at the periphery,
a visible ring involving central die-back, is expected to
envelope, with a large positive or
or
negative bump at their center that decays into the
form.
Methods
far field. Then there are rings2.1.(figure
1.1) which look like target patterns: assuming
At the beginning of the growing season (early winter)
2
stationarity and radial symmetryindividual
they P.would
look(10–15
likecmu(r)
= acompletely
cos bre−c(r−bπ) . Spots can
bulbosa genets
diameter),
covered with green leaves, were transplanted into 4 L pots
cm diameter) and to a greenhouse. Genets were collected
be concentrated on a hexagonal (18
lattice
to produce hexagon patterns as is seen in all three
from a dry Mediterranean field site (Adulam, Israel 31816 N
2.
0
348250 E) with an annual average rainfall of 400 mm yr!1, after
ca. 270 mm of precipitation. The pots were filled with
vermiculite, a homogeneous artificial horticultural substrate,
and distributed at random in a greenhouse for maximal
uniformity. To investigate whether pattern formation is water
dependent we uniformly irrigated the pots (after 2 weeks
acclimation period) once a week for 13–14 weeks (until the end
of the winter growth season), with water amounts equivalent
to 0, 100, 300 and 500 mm rainfall yr!1 (0, 126, 380 and 630 mL
per pot per week accordingly), 20 replications per water
treatment.
figures. Hexagons can fill the entire plane or form in infinite strips as well as in growing
Experimental studies
and shrinking patches. Three-dimensional spots, such as light bullets, also exist and could
To investigate whether ring formation is water dependent
we tested the influence of different water regimes on the
growth of P. bulbosa L. genets in laboratory conditions. We
hypothesized that non-uniform biomass distributions
should result from competition of individual ramets over
the limited water resource. Moreover, individuals in the
central part of a genet patch should experience stronger
be organized into coherent stacks like in a crystal lattice.
In this thesis, I will study stationary radially symmetric solutions in the Swift–Hohenberg
equation:
ut = −(1 + ∆)2 u − µu + νu2 − κu3 + O(u4 ),
x ∈ Rn .
(0.1)
I will concentrate on spots and rings. They are interesting structures in their own right,
but additionally in two dimensions hexagons are known to appear from spots through
a symmetry breaking bifurcation [23, 3]. I am interested in the existence and bifurcation structure of different solutions ranging from one to three dimensions. The planar
4
Figure 1.2: Ferrosoliton from [17]. Hexagons from [31].
Ferro-fluids [Richter]
Swift–Hohenberg (SH) equation serves as a normal form for Turing bifurcations in reaction diffusion equations with small data. It is one of the simplest models that exhibits
interesting pattern forming behavior and is studied as an archetypical system for these
reasons. Under the assumptions of stationarity and radial symmetry, this equation can be
simplified dramatically to
(∂r2 +
n−1
∂r + 1)2 u = −µu + νu2 − κu3 ,
r
r∈R
(0.2)
where n is the dimension.
In the above equation, the dimension appears explicitly. I will treat n as a continuous
parameter and study the equation’s solutions as the dimension varies. This will allow me
to examine how certain interesting features of the solutions cease and adjust between the
one dimensional, planar and spherical cases. The behavior for non-integer values of n is
interesting for analytical reasons. For example, the one dimensional SH equation exhibits
snaking: this is pictured in figure 3.1. This is characterized by a parameter region where an
infinite family of solutions exist. These look like localized roll patterns, only each solution
has a different number of rolls. The bifurcation curve for these solutions is connected
and appears like a snake’s tracks in grass. The behavior disappears in two and three
dimensions, and by treating the dimension as a continuous parameter I can examine how
the Hamiltonian of the system changes for an infinitesimally small change from n = 1. The
1050
LLOYD, SANDSTED
5
Figure 1.3: Patterns from [22].
ability to adjust n continuously is helpful from a numerical standpoint as well. It allows
Figure 1. (a) Localized stationary spots and hexagon patches of (1.1
me stationary
to find solutions
in twoand
and stripes
three dimensions
from for
the well
dimensional
spots
of (1.5)
(µ,known
ν) =one
(2.5,
4). Both images
solutions
versa.
u(x, and
y), vice
with
x plotted horizontally and y vertically, where the values o
indicated in the color bars shown to the right of the color plots: The colo
are
incontinuation
the samesoftware
fashion.
I usedproduced
the numerical
auto07p [14] to study the bifurcation structure of the stationary radially symmetric SH equation. Previous work had uncovered two
snaking families of symmetric solutions in one dimension. Asymmetric branches of solu-
focus on the region ν ≥ 0 since the case ν < 0 is then recovere
trivial state u = 0 is stable for µ > 0 and destabilizes at µ =
two-pulses lying on isolas between the snaking branches and ladders. Additionally, [22]
that have nonzero finite spatial wavelength. At µ = 0, hexa
uncovered two families of ring solutions and one family of spot solutions in the planar case;
bifurcation from u = 0 for each ν >the0,twowhile
rolls bifurcate in a
these were believed to snake. The present work reveals that!
dimensional solutions
from u = 0 provided ν > νr :=and become
27/38
[44]. While the bif
do not snake. The ring solutions eventually turn around
spot solutions. This
initially unstable for µ > 0, they stabilize in a subsequent s
means a second spot, referred to as spot B (with the original spot being spot A), exists.
to bistability between the nontrivial patterns and the trivial
By following the solutions down to one dimension the spots can be seen to become the
of trivial
and
patterned
states
opens symmetric
up thebifurcation
possibility of fi
snaking
branches while
the rings
become two pulses.
The spherically
patches
of hexagons
rolls
those
in Figure 1.
structure
is qualitatively
similar to theor
planar
case. such
For n > as
1 snaking
seemsshown
to terminate.
we profiles
shallforfocus
paper.
Sample
the spotson
and in
ringsthis
are presented
in figure 1.4.
We first review briefly the situation in one dimension and
existence of spot A, spot B, and the rings is established numerically through
aThemore
extensive discussion. In one space dimension, the Swi
the computations mentioned above. I use analytic methods coming from the study of
localized structures, as shown in Figure 2. The patterns show
dynamical system to establish the existence of some of these solutions analytically. Spot A
eter space, and their width increases as we move up on the
is referred to as snaking [92]. There are several interesting q
patterns shown in Figure 2: can we predict for which values
can we determine a priori which periodic pattern is selected t
tions exist that connect the snaking curves. The work of [21] established the existence of
6
u
Spot A
Spot B
Ring
Spot B
u
r
r
Figure 1.4: The profiles for rings and spots.
and the rings were shown to exist analytically in [22]. Using similar methods, I have proven
the existence of spot A in three dimensions. However, this same approach does not work to
show spot B exists. The existence of spot B in two dimensions is established in this thesis,
and the proof relies on the existence results of [22]. In some sense, spot B forms by gluing
the spot A and ring solutions together in a piecewise fashion, but it behaves differently
from either the rings or spot A in some unexpected ways.
The thesis is organized as follows. In chapter 2, I discuss the general analytic approach
used to establish the existence of the spot solutions. This will include examples and
explanations for many of the key ideas used in the proofs. Chapter 3 details the numerical
experimentation using auto07p. The numerical methods will be briefly explained and
most of the chapter is dedicated to the bifurcation structure and its variation with changing
dimensions. Chapter 4 rigorously establishes the existence of spot B in two dimensions.
The proof for spot B implies certain behavior should be seen in the solution profiles, and
some additional calculations are done to verify this behavior. In the conclusions, I discuss
some open problems exposed by the previous results and briefly give some ideas that might
be useful to their resolution.
Remark 0.1. Spot A, spot B and the rings exist for different values of the parameters ν
and κ: see the following chart for details. Spot B, being a spot A and ring glued together,
only exists for parameter values (ν, κ) where the rings exist. This restriction on ν is solely
used to establish the rings for the proof.
7
Existence Regions
Spot A
Spot B
Rings
ν>0
q
ν > 27κ
38
q
ν > 27κ
38
Chapter
Two
Preliminaries
9
This thesis concentrates on the existence of stationary solutions to the Swift–Hohenberg
equation: all the numerical and analytical techniques used arise from the study of dynamical systems. In order to apply dynamical systems techniques to partial differential
equations (PDEs), I will use spatial dynamics. Spatial dynamics refers to singling out a
single spatial coordinate from the ambient space for treatment as the dynamical variable.
This technique is especially well-suited to studying stationary one-dimensional solutions
to PDEs. Traveling wave solutions, after switching to a co-moving reference frame, submit
to the same techniques. In chapter 4 and in [25], these techniques are used to prove the
existence of radially symmetric solutions in two and three dimensions where the radius is
the spatial variable of interest.
First, we would like to discuss some basic properties of ordinary differential equations
(ODEs). The fixed point (0, 0) of the trivial linear ODE
d u 2 0 u
=
dt v
0 −1
v
with solution
2t
u(t) Cu e
=
v(t)
Cv e−t
has stable manifold given by the v direction and unstable manifold given by u. More
generally, the stable manifold consists of all solutions that converge to the equilibrium
as t → ∞, and the unstable manifold of all solutions that converge to the equilibrium
as t → −∞. Many techniques exist to track these manifolds near the equilibrium, and,
in certain perturbative regimes, far from the equilibrium. For our purposes, normal form
coordinates and the variation of constants formula will suffice to do this. Invariant manifold
theory forms a cornerstone in the study of dynamical systems and it will be our primary
tool to prove the existence of the spot solutions. These methods will be further discussed
below, and the roughness of exponential dichotomies will proved as an illustrative example.
The section will finish with a discussion of Turing bifurcations.
10
2.1
Variation of constants
The variation of constants formula, here quoted from [10, Proposition 2.37 (Variation of
Constants Formula)], allows us to write down the full solution to an ODE when we know
the evolution operator for the linear leading order system. For a smooth function g, we
have the following formula.
Proposition 1.1. Consider the initial value problem
ẋ = A(t)x + g(x, t),
x(t0 ) = x0
and let t 7→ Φ(t) be a fundamental matrix solution for the homogeneous system ẋ = A(t)x
that is defined on some interval J0 containing t0 . If t 7→ φ(t) is the solution of the initial
value problem defined on some subinterval of J0 , then
φ(t) = Φ(t)Φ
−1
(t0 )x0 + Φ(t)
Z
t
Φ−1 (s)g(φ(s), s)ds.
t0
We mostly deal with systems in a perturbative regime, where the leading order system is
linear and hyperbolic. The nonlinearities are generally small perturbations away from this.
This variation of constants formula allows us to write down a fixed point equation for our
solutions, and then we can solve them using the contraction mapping principle. Generally,
we can make the formula a contraction through a small choice of one of the equation
parameters. This then gives us a unique solution for each value of that parameter, which
varies smoothly with the parameter. Often, we need to simplify the ODE in order to find
a contraction, removing terms that do not uniformly shrink with the relevant parameters.
For this, we use normal forms.
11
2.2
Resonant terms and normal forms
Often when dealing with a system of ODEs, we would like to transform them into a
simpler form. The real difficulty is understanding what terms can be removed, which
cannot, and what transformations will achieve this. The study of normal forms provides
the answers to these questions. The reduction to normal forms is achieved through power
series expansions in the distance from an equilibrium position. These transformations do
not always converge, though in C ∞ these transformations can generally be made rigorous.
Poincaré developed the formal theory that allows us to simplify a non-resonant vector
field into a linear field at a singularity. The vector fields he studied are formal power series
and the transformations are formal diffeomorphisms. Consider the vector valued power
series
v(x) = Ax + · · · ,
x ∈ Rn
where A has eigenvalues λ1 , . . . , λn . A resonance is defined between eigenvalues as a relation
of the form
λi =
X
kj λj ,
j
with each kj ≥ 0 and
P
kj ∈ Z
kj ≥ 2. A non-resonant vector field has no resonances between
any of its eigenvalues. Poincaré argued formally that the equation
ẋ = Ax + · · ·
can be reduced to
ẏ = Ay
when the original vector field in x is non-resonant.
More generally, any non-resonant term can be removed while resonant terms remain.
12
Consider the example
1
2
u
2 0 0 u uv w
v = 0 1 0 v + u2 + vw + h.o.t..
w
0 0 −1
w
vw2
t
By using normal forms, this can be reduced to
1
0
0
u
u
0
2
v = 0 1 0 v + u2 + h.o.t.
0 0 −1
w
w
vw2
t
near (0, 0, 0). Only the resonant terms remain. These are essentially the terms that grow
or decay at the same rate as the linear terms in each component, and they cannot be
separated from the linear flow.
The normal form coordinates we use are only valid locally around the equilibrium. We
will use them to understand the dynamics very near to different fixed points, but we will
need to resort to different techniques to understand how the evolution occurs between the
equilibria.
2.3
Stable manifold theorem
In general, very little progress can be made on the study of nonlinear ODEs. However,
if we can find fixed points to these nonlinear systems, then we can sometimes make a
great deal of progress near the fixed points by linearizing the equations. Generally, we
want to require the fixed point is hyperbolic such that the nonlinear contributions become
arbitrarily small as compared to the linear flow at the equilibrium. We then find stable
and unstable manifolds very near to the stable and unstable directions of the linear flow.
The stable manifold theorem, as quoted from [18, Theorem 1.3.2], makes this claim more
13
precise.
Theorem 1. Suppose that ẋ = f (x) has a hyperbolic fixed point x̄. Then there exist local
s (x̄), W u (x̄), of the same dimensions n , n as those of
stable and unstable manifolds Wloc
s
u
loc
the eigenspaces E s , E u of the linearized system
ẏ = Df (x̄)y,
y ∈ Rn ,
s (x̄), W u (x̄) are as smooth as the function f .
and tangent to E s , E u at x̄. Wloc
loc
These stable and unstable manifolds are only given locally by this result. They can
be extended globally by flowing the manifold out for infinite negative and positive time.
This result also tells us nothing when we have a nonzero eigenvalue λ with Re λ = 0 in the
linear system. More can be said in this situation, but it is not needed for our work.
Fixed points are the most basic invariant manifolds, but they are dynamically boring.
However, the stable and unstable manifolds of these fixed points can create very interesting
dynamics. They can intersect with other stable and unstable manifolds for the same and
different equilibria. It is this very phenomena that gives rise to the radially symmetric
solutions we study.
2.4
Roughness theorem for exponential dichotomies
In itself a very useful theorem, proving the persistence of exponential dichotomies under
various perturbations provides a nice example of many of the techniques employed in this
thesis. Exponential dichotomies for the system
d
u = A(ξ; λ)u
dξ
with u ∈ Cn are defined in [32, Definition 3.1].
(4.1)
14
Definition 4.1. Let I = R+ , R− or R, and fix λ∗ ∈ C. We say that eq. (4.1) with λ = λ∗
fixed, has an exponential dichotomy on I if constants K > 0 and κs < 0 < κu exist as well
as a family of projections P (ξ), defined and continuous for ξ ∈ I, such that the following
is true for ξ, ζ ∈ I.
• With Φs (ξ, ζ) := Φ(ξ, ζ)P (ζ) where Φ(ξ, ζ) is the evolution operator of equation (4.1),
we have
s (ξ−ζ)
|Φs (ξ, ζ)| ≤ Keκ
,
ξ ≥ ζ,
ξ, ζ ∈ I.
ξ ≤ ζ,
ξ, ζ ∈ I.
• Define Φu (ξ, ζ) := Φ(ξ, ζ)(id − P (ζ))), then
u (ξ−ζ)
|Φu (ξ, ζ)| ≤ Keκ
,
• The projections commute with the evolution, Φ(ξ, ζ)P (ζ) = P (ξ)Φ(ξ, ζ), so that
Φs (ξ, ζ)u0 ∈ R(P (ξ)),
ξ ≥ ζ,
ξ, ζ ∈ I
Φu (ξ, ζ)u0 ∈ N(P (ξ)),
ξ ≤ ζ,
ξ, ζ ∈ I.
Now we consider a small perturbation of the linear system
ut = Au + B(t)u
(4.2)
where we assume A is hyperbolic and supt |B(t)| < ε. Assuming A is a constant matrix is
not necessary, we only need that the equation ut = A(t)u possesses exponential dichotomies
itself. Also define the spectral projections P0s and P0u onto the set of eigenvalues of A with
negative and positive real part respectively. Then there exist positive constants η, K > 0
such that for t ≥ 0 we can write down the estimates
At s −At u e P0 + e
P0 ≤ Ke−ηt .
Theorem 2. For a sufficiently small ε, the perturbed system (4.2) possesses an exponential
15
dichotomy with constants K̃ and 0 < γ < η for some δ > 0.
Proof. Banach’s fixed point theorem can be applied to an appropriate integral equation
to construct the perturbed exponential dichotomies. These are denoted by Φs (t, s) and
Φu (t, s). The integral equation comes from the variation of constants formula,
Z t
Z t
Φs (t, s) = eA(t−s) P0s +
eA(t−τ ) P0s B(τ )Φs (τ, s)dτ +
eA(t−τ ) P0u B(τ )Φs (τ, s)dτ
s
∞
Z s
A(t−τ ) s
u
e
P0 B(τ )Φ (τ, s)dτ,
t ≥ s ≥ t0
−
t0
Z t
Z t
Φu (t, s) = eA(t−s) P0u +
eA(t−τ ) P0u B(τ )Φu (τ, s)dτ +
eA(t−τ ) P0s B(τ )Φu (τ, s)dτ
s
t0
Z ∞
+
eA(t−τ ) P0u B(τ )Φs (τ, s)dτ,
s ≥ t ≥ t0 .
s
This equation can be found in the literature, for example [32, equation (3.8)].
The right hand side is a contraction in the space
χs = {Φs : Φs (t, s) defined and continuous for t ≥ s ≥ t0 }
χu = {Φu : Φu (t, s) defined and continuous for s ≥ t ≥ t0 }
with norms
kΦs ks =
t≥s≥t0
kΦ ku =
s≥t≥t0
u
sup eγ(t−s) |Φs (t, s)|
sup eγ(s−t) |Φu (t, s)|.
We have now established a new exponential dichotomy, given by Φs,u , for the perturbed
system. This completes the proof of the theorem.
In the proof of the above theorem, the use of the contraction mapping principle on
a fixed point equation in function space was crucial to establishing the claim. The fixed
point equation came directly from the variation of constants formula, and the fixed point
16
was the function of interest. In a similar way, we will often use the variation of constants
formula to write down an equation for our nonlinear flows in a perturbative regime. These
will generally be solved by finding a contraction in an appropriate space. Unlike the above
proof, we often need the explicit estimates on the solution provided by the variation of
constants formula.
2.5
Turing bifurcations
A Turing bifurcation is a diffusion-driven instability. When this was first proposed in
[37], it was a radical idea because diffusion was believed to only stabilize systems. Here,
through a simple calculation, we will provide an explicit example where the introduction
of diffusion drives an otherwise stable system into an unstable configuration. This section
closely follows the discussion in [26, Chapter 2] and requires a linear stability analysis.
Consider the following reaction-diffusion system for u, v ∈ R:
ut = γf (u, v) + ∆u
vt = γg(u, v) + d∆v
with γ > 0 < d, d 6= 1 and a homogeneous steady state f (u0 , v0 ) = g(u0 , v0 ) = 0. First,
this system must be stable without the diffusive terms. The coordinates ũ = u − u0 and
ṽ = v − v0 are more useful for the following calculations. To perform the linear stability
analysis we start with
ũ
fu (u0 , v0 ) fv (u0 , v0 ) ũ
=γ
=: γA~u.
ṽ
gu (u0 , v0 ) gv (u0 , v0 )
ṽ
By plugging in the ansatz
ũ
λt
∝e ,
ṽ
17
we arrive at the eigenvalue problem
fu (u0 , v0 ) fv (u0 , v0 )
γ
−
λI
= λ2 − γλ(fu + gv ) + γ 2 (fu gv − gu fv ) = 0.
gu (u0 , v0 ) gv (u0 , v0 )
The eigenvalues are given by
1p 2
1
γ (fu + gv )2 − 4γ 2 (fu gv − fv gu ).
λ± = γ(fu + gv ) ±
2
2
This gives us the conditions fu + gv < 0 and fu gv − fv gu > 0 to guarantee a stable
system (the real part of the eigenvalues must be negative). Using the coordinates ũ = u−u0
and ṽ = v − v0 , we now show that adding the diffusive term causes an instability. The
linearized equation around (0, 0) is
ũt
fu (u0 , v0 ) fv (u0 , v0 ) ũ 1 0 ∆ũ
=γ
+
.
ṽt
gu (u0 , v0 ) gv (u0 , v0 )
ṽ
0 d
∆ṽ
Define
1 0
D=
.
0 d
Now we want to study solutions to this equation of the form
~u(t) ∝
X
eλt eikx
k
where the k are Fourier wavenumbers. The eigenvalues, λ, can then be found as roots of
the characteristic polynomial
|λI − γA + Dk 2 | = 0.
After taking the determinant, we find the following expression for the eigenvalues
0 = λ2 + λ k 2 (1 + d) − γ(fu + gv ) + h(k 2 ) with
h(k 2 ) = dk 4 − γ(dfu + gv )k 2 + γ 2 |A|.
18
If we can find a k 6= 0 such that a solution to this eigenvalue problem has a positive
real part, then this system is now unstable due to the addition of a diffusive term. The
k = 0 case is assumed stable as it is the case without diffusion. An instability will occur if
h(k 2 ) < 0 for some choice of k. After a bit of work, this tells us two more conditions that
will ensure an instability in the full system with diffusion:
dfu + gv > 0,
and
(dfu + gv )2
> fu gv − fv gu .
4d
Turing instabilities, through the mechanism just described, create patterns in reactiondiffusion systems. They are often applied to any pattern forming system simply because
they are the best understood model that can produce such structures. Unfortunately, many
of these situations cannot be shown, or have not been shown to fit into such a framework.
In the work below, we use the Swift–Hohenberg equation because it is a normal form for
such bifurcations, and because it is often studied. It is important, however, to remember
that other models may exist that better serve to explain many experimental patterns.
Chapter
Three
Numerical Exploration
20
The contents of this chapter were published under the title Snaking of radial solutions of
the multi-dimensional Swift–Hohenberg equation: a numerical study in Physica D; see [24].
We are interested in the formation and parameter dependence of localized stationary
radial solutions of the variational Swift–Hohenberg equation
ut = −(1 + ∆)2 u − µu + νu2 − u3 ,
x ∈ Rn .
(0.1)
This equation was first derived by Swift and Hohenberg [36] to describe the effects of
random thermal fluctuations on fluid convection just below onset. As shown for instance
in [34], the steady Swift–Hohenberg equation is also the normal-form equation for smallamplitude radial solutions at Turing bifurcations in reaction-diffusion systems. More generally, the Swift–Hohenberg equation serves as a paradigm for bistable pattern-forming
systems: it exhibits a plethora of interesting localized and non-localized patterns that
have also been found in many other biological and physical systems [12, 16, 19, 28, 30].
Our interest is in localized radial steady-state solutions of (0.1). Part of our motivation
stems from the observation made in [23, 3] that localized stripe, hexagon and rhomboid
patches emerge from localized radial solutions via symmetry-breaking bifurcations. In addition to their relevance to such patterned patches, radial solutions are of interest in their
own right in many physical systems, and we refer to [6, 13, 20] for references to systems
that admit localized patterns of the shape discussed below.
We now discuss equation (0.1) in more detail. Throughout this chapter, we take ν > 0
as the case ν < 0 is obtained upon replacing u by −u. Unless stated otherwise, all
computations presented below are, in fact, done for ν = 1.6. The background state u = 0
is stable for µ > 0 and destabilizes in a Turing bifurcation at µ = 0. The Turing bifurcation
gives rise to spatially periodic stationary patterns with period near 2π, which we refer to
p
as rolls. Rolls bifurcate into the region µ > 0 for ν > ν∗ = 27/38 ≈ 0.84 and into the
region µ < 0 otherwise. For fixed ν > ν∗ , rolls are initially unstable, but when continued
towards increasing µ, they undergo a fold bifurcation for sufficiently large µ at which they
21
stabilize. They then return back as stable patterns towards decreasing µ and finally cross
µ = 0 with positive amplitude.
As mentioned above, we focus on localized stationary radial solutions u(x, t) = u(|x|)
of the Swift–Hohenberg equation. Such patterns satisfy the equation
∂r2
n−1
+
∂r + 1
r
2
u = −µu + νu2 − u3 ,
r ∈ R+
(0.2)
with the boundary conditions ur (0) = urrr (0) = 0 and limr→∞ u(r) = 0, where r := |x|.
To measure and represent the spatial width of localized radial patterns, we use their oneand two-dimensional L2 -norms given, respectively, by
kuk2L2x
:=
Z
∞
0
|u(x)| dx,
2
kuk2L2r
:=
Z
0
∞
|u(r)|2 r dr.
In (0.2), we can clearly consider n as a continuous parameter and examine the dependence
of localized patterns on the continuous dimension parameter n. We are particularly interested in solution profiles u(r) that exist for µ > 0 and are, in an appropriate sense,
composed of the stable roll structures that we discussed above. In one space dimension,
these radial profiles resemble stable rolls with a localized envelope superimposed on them
as illustrated in Figure 3.1, so that they can be thought of as localized rolls. In the planar
case, the radial profiles we are interested in appear as localized target patterns; see Figure 3.2. We now summarize some of the known results about localized radial structures in
dimension n = 1, 2, 3 for µ > 0.
When n = 1, equation (0.2) is reversible and Hamiltonian, and much is known about
localized radial patterns and their bifurcation diagrams [4, 5, 6, 7, 8, 11, 40]. Localized
roll structures, which we refer to as pulses, exist for ν > ν∗ . Symmetric pulses that are
invariant under x 7→ −x snake: their bifurcation branch, obtained by plotting the width
of the roll plateau as measured by their L2x -norm against the parameter µ, resembles a
vertical sinusoidal curve; see Figure 3.1. As we move up along the branch, pulses broaden
as new rolls are added on either end at every other fold. As shown in Figure 3.1, there are
22
u
1
3
1
�u�2L2
x
x
4
2
2
3
4
5
0.18
0.2
5
µ
Figure 3.1: The center panel contains the bifurcation diagram of 1D localized pulses. The symmetric
profiles that correspond to parameters on the light-colored curve have a maximum at r = 0 as shown
in panels (1), (2), and (5), while the symmetric profiles corresponding to the dark-colored branch have
a minimum at r = 0 as illustrated in panel (3). As we move up on each branch, a pair of new rolls is
added to the solution profile at every other fold bifurcation. The two different branches discussed above are
connected by ladder branches that correspond to asymmetric profiles as indicated in panels (3)-(5). These
asymmetric structures bifurcate at pitchfork bifurcations near each fold from the symmetric pulses.
two branches of symmetric pulses with either a positive maximum or a negative minimum
at x = 0, and these branches are connected by horizontal ladder branches that correspond
to asymmetric localized roll patterns. Among the other known solutions are symmetric
2-pulses, which are bound states of two individual well-separated localized roll structures.
Two-pulses exist along figure-eight isolas that lie inside the regions formed by two consecutive ladder branches and the two snaking curves that connect them [38, 39]. More precisely,
symmetric 2-pulses exist along a two-parameter family of isolas that are parametrized by
(s, `), where ` ∈ N denotes the number of rolls in each of the two individual localized roll
structures that make up the 2-pulse, and s ∈ N is the number of small-amplitude oscillations near u = 0 in between the two individual pulses [21]. Thus, s can be thought of
as a measure of the separation width, while ` represents the L2x -norm of the 2-pulse. In
particular, a countably infinite number of 2-pulses are expected to exist for each fixed value
of their L2x -norm, and these 2-pulses are distinguished from each other by the increasing
separation distance between the two individual pulses.
In two dimensions, several different kinds of localized radial patterns were recently
found in [22]. First, for each ν > 0, spots bifurcate from µ = 0 into µ > 0. As illustrated
in Figure 3.2, these spots resemble J0 Bessel functions near r = 0, and they have an initial
23
�u�2L2r
u(r)
Spot
Spot
r
u(r)
µ
�u�2L2r
Ring
Ring
r
µ
Figure 3.2: Shown are profiles, representative color plots, and bifurcation branches of localized planar
spot A solutions in the top row and of the two localized planar ring solutions in the bottom row. Profiles
and color plots correspond to solutions at (µ, ν) = (0.005, 1.6). [Reproduced from [22]].
amplitude of order
√
µ for small µ. From now on, we refer to these structures as spot A
solutions. In addition to these spots, two ring solutions emerge from µ = 0 for each fixed
√
ν > ν∗ . These solutions have an overall sech-like shape with a maximum of order µ that
√
occurs at r ' 1/ µ. For ν > ν∗ , spot A and the two rings appear to snake as can be seen
in Figure 3.2. All of these solutions were proved to exist for 0 < µ 1 in [22].
In three dimensions, numerical evidence for the existence of spots was presented in [22];
their existence near onset is proved in [25]. In contrast to the planar case, 3D spots do not
appear to snake: instead, the L2r -norm along branches of localized spots stays bounded.
Our goal in this chapter is to understand the change in the behavior of spots and
rings when the dimension switches from two to three, and to investigate how the 1D, 2D,
and 3D structures described above are related to each other. To elucidate the different
behaviors of profiles and branches as n varies, we treat n as a continuous parameter and
use numerical continuation techniques to follow spots and rings from n = 2 upwards to
n = 3 and downwards to n = 1. In particular, the focus of this chapter is on numerical
computations, though we will outline some possible avenues for analysis and rigorous proofs
in §3.5 below. We now briefly summarize our results.
24
Spot A
Spot B
Spot B
u
u
r
Spot A
r
Figure 3.3: The profiles of spots A and B with (µ, ν) = (0.005, 1.6) are compared in the left panel, while
an enlarged plot of spot A is shown separately in the right panel. Note that spot B resembles an inverted
spot A but with a much larger amplitude. The zeros of both profiles appear to align well for r 1.
First, we discovered a second family of planar 2D spots, from now on referred to as
spot B, which seem to exist only for ν > ν∗ . In contrast to the spot A structures, spot B
solutions have a negative minimum at r = 0 as shown in Figure 3.3. In addition, they
3
1
appear to scale like µ 8 as µ → 0 and are therefore not captured by the µ 2 -scaling used in
the analysis of spot A solutions in [22].
Second, when we follow spots A and B and the two ring structures down in dimension
to n = 1, we find that spot A and B become, respectively, the symmetric 1D pulses
with a maximum and a minimum at r = 0 that we discussed above. The two rings,
however, turn into symmetric 1D 2-pulses. Recall that symmetric 2-pulses exist along a
two-parameter family of isolas, and the mechanism for the production of isolated branches
from two connected ring snaking curves turns out to be quite complicated. Our numerical
continuation results show that each ring curve folds over onto itself several times in a
complicated manner and then pinches off a number of 2-pulse isolas. On the other hand,
we also found 2-pulse isolas that are not connected to the ring branches upon increasing n
but instead shrink to a point and disappear.
Our third result concerns the snaking structure of spots A and B for 2 ≤ n ≤ 3, which
turns out to be equally complicated. Recall that indefinite snaking was predicted in [22]
from the numerical computations presented there. It turns out that the computations
in [22] were stopped at a value of the L2r -norm that was not large enough to reveal the
25
more complicated bifurcation structure that we report on here. Indeed, as we follow
spot A up on its bifurcation curve, the curve eventually turns around, and the L2r -norm
of the spots begins to decrease again. At this point, the profile of the underlying pattern
transforms from a spot to the profile of one of the two rings. Similarly, spot B broadens
for a while, but eventually transforms into the second ring and follows the ring bifurcation
curve downwards towards decreasing L2r -norm. In particular, spots and rings are pairwise
connected in parameter space. Above these two connected curves lies a family of stacked
isolas of localized structures, which also terminates for a large enough value of the L2r norm. Above these stacked isolas, we found a connected U -shaped solution curve that
seems to extend up to infinite L2r -norm. Both of the two branches of this curve snake
and the associated profiles cycle through spot A and B solutions. These branches seem
to continue indefinitely towards increasing L2r -norm, but the width of the snaking regions
in the µ-direction decreases. We also gain insight into how the snaking curves above and
below the isolas depend on the parameter µ and will discuss this further in §3.2.
We proceed as follows. Section 3.1 describes the numerical techniques used. Section 3.2
details the bifurcation structures for n = 2. In §3.3, the changes of the bifurcation structure
are explored when n is increased from two to three, while §3.4 discusses how these structures
change when n is decreased from two to one. Section 3.5 presents conclusions and open
problems.
3.1
Numerical algorithms
For the sake of clarity, we briefly outline the numerical protocols used in the exploration
of the snaking diagrams. To continue localized radial profiles, we numerically solved
26
boundary-value problems that are based on the first-order system
u
u1
u2
d
u1
=
dr u
u3
2
u3
−(1 + µ)u + νu2 − u3 − 2( n−1
r u1 + u2 ) +
(n−1)(n−3) u1
(r
r2
− u2 ) −
2(n−1)
u3
r
(1.1)
on the interval (0, L) together with the Neumann boundary conditions
u1 (0) = 0,
u3 (0) = 0,
u1 (L) = 0,
u3 (L) = 0
(1.2)
at r = 0, L. Unless stated differently, we used ν = 1.6 in all computations. We employed
auto07p [14] to continue solutions of (1.1)-(10.1) in the parameter µ. Computing the
connected snaking branches of symmetric 1D pulses and planar spots and rings is then
straightforward. To ensure that the results do not depend on the value of L and to
prevent boundary effects, we checked for each computation that the computed patterns
are sufficiently small near the boundary and, in addition, repeated these computations for
significantly larger values of L (typically at least doubling L). In the rest of this section,
we outline the changes that are necessary to continue asymmetric pulses and to find isolas
of symmetric 2-pulses, planar spots and planar rings.
Finding isolas:
There are several types of isolas that appear in our calculations, and it
requires different techniques to find them. When an isola lies above a snaking segment, we
must move around in parameter space in order to find the isola. Fortunately, the bifurcation
structure provides an easy solution. As n is decreased, the height of the connected snaking
curve is found to increase. Thus, we initially continue a solution in n for fixed µ towards
an appropriate smaller value of n, and then fix this value of n and follow the snaking curve
in µ towards increasing L2r -norm. Afterwards, we fix the parameter µ and continue in n
towards increasing n until we reach its original value. If we continued high enough in the
L2r -norm in the second step, the final solution will lie on an isola, which we can now trace
27
out by continuing in µ for fixed n. When we continue ring structures from dimension two
to dimension one, isolas of 2-pulses are pinched off the bifurcation curves. To find these
isolas, we continue a large number of solutions with starting data in a single period of the
snaking structure towards decreasing n.
Computing asymmetric 1D pulses:
The computation of asymmetric pulses for n = 1,
when the system (1.1) is autonomous, requires an additional phase condition to fix the
location of the localized pattern somewhere inside the interval (0, L). We use the usual
integral phase constraint
Z
0
L
old
uold
1 (x)(u(x) − u (x)) dx,
(1.3)
where uold refers to the solution evaluated at a previous continuation step. In order to solve
the phase constraint, we add the term cu1 to the last component in (1.1), so that c can be
thought of as a wave speed: theoretically, c should vanish identically during continuation;
in practice we found that c is typically of order 10−12 and certainly never exceeds 10−6 .
To find starting data, we break the pitchfork bifurcation through which the asymmetric
states appear, which will allow us to obtain asymmetric pulses by continuing the known
symmetric pulses. To break the reflection symmetry r 7→ −r present for n = 1, we add the
term δ sin r to the fourth component of (1.1). Thus, to find asymmetric pulses, we solve
(1.1) with the expression (0, 0, 0, cu1 + δ sin r)t added to its right-hand side, together with
(10.1)-(1.3). We start with a symmetric 1D pulse away from the pitchfork bifurcation and
continue initially in δ up to a fixed small value, typically near δ = 0.05. Afterwards, we
continue in µ for fixed δ until we encounter a fold bifurcation. Once we have passed the
fold bifurcation, we continue in δ for fixed µ until δ becomes zero. The resulting structure
is then the desired asymmetric profile on a ladder branch, which can be validated by
continuing again in µ. During the above computations, we allow c to vary, although, as
explained above, its value will stay close to zero.
28
3.2
Localized 2D states
In this section, we focus on the bifurcation diagram of spots and rings for equation (0.2)
with n = 2. We emphasize that other localized structures may exist but these are not
p
considered here. We fix ν = 1.6 and note that ν exceeds the critical value ν∗ = 27/38 ≈
0.84 below which rings do not exist. We consider exclusively the regime µ > 0, where
u = 0 is stable for (0.1).
As already mentioned, the existence of three solution branches associated with smallamplitude spot A structures and two ring patterns was proved in [22] for 0 < µ 1 in the
regions ν > 0 for spot A and ν > ν∗ for rings. The numerical evidence presented in [22]
indicated that these branches begin to snake indefinitely as in the one-dimensional case.
Indeed, the three solution branches were continued in µ a significant distance away from
the origin, and convincing snaking was seen with the associated folds approaching two
vertical asymptotes. As in the one-dimensional case, additional localized rolls are added
at every other fold along the branch near the tail of these localized structures.
It turns out, however, that this picture changes drastically when a large enough number
of localized rolls has been added to the underlying pattern or, in other words, when the
L2r -norm has become sufficiently large. In Figure 3.4(i), we present computations that
indicate that the spot A branch and one of the ring branches are connected in parameter
space. In other words, if we continue spot A solutions towards increasing L2r -norm, then
the branch will reach a maximal L2r -norm near which the spot A profiles transform into
rings, and the branch will then continue downwards towards decreasing L2r -norm along the
ring branch. At the maximal L2 -norm, the underlying profile consists of around 20 rolls.
Figure 3.4(ii) shows the results of a similar computation, where we continued the second
ring along its bifurcation branch. At the top of the solution branch shown in Figure 3.4(ii),
the ring profiles transform into spot-like profiles, with the maximal amplitudes occurring
near the core at r = 0, and the associated branch descends towards lower values of the
L2r -norm. This second spot (spot B) has not been observed before, and we will comment on
29
!u!2L2r
(i)
secondary
snaking
structure
!u!2L2r
µ
(ii)
µ
Figure 3.4: Shown are the connected bifurcation curve of spot A and one of the ring solutions in panel (i)
and the bifurcation branch of spot B and the second ring solution in panel (ii). In the upper right corner of
panel (i), the branch oscillates between three folds aligned approximately at µ ≈ 0.18, 0.19, and 0.21, and
we refer to the part of the branch that oscillates between the two rightmost folds as the secondary snaking
structure. Note that the vertical L2r -axes in panels (i)-(ii) are scaled differently: in particular, the spot A
branch reaches a larger value of the L2r -norm. The solution profiles at the points labelled (a)-(d) are shown
in Figure 3.5.
u(r)
u(r)
r
r
u(r)
u(r)
r
r
Figure 3.5: Panels (a)-(d) contain the solution profiles of spots and rings at the parameter values
labelled (a)-(d) on the branches shown in Figure 3.4. As the spot and ring branches are traversed
towards increasing L2r -norm, additional rolls are added at the right tail of the localized profiles.
The maximal (minimal) amplitude of spot A (spot B) always occurs at r = 0 along the branch.
For rings, u(0; µ) oscillates between positive and negative values as we move from one leftmost fold
to the next on the branch; new rolls are created only at the tail but not near r = 0. We refer to the movies at
http://www.dam.brown.edu/people/mccalla/SpotAmovie.mpg and
http://www.dam.brown.edu/people/mccalla/SpotBmovie.mpg
for further details on the behavior of spots and rings.
30
(i)
�u�2L2r
(ii)
�u�2L2r
secondary!
snaking!
structure
Spot B
µ
µ
Figure 3.6: Panel (i) shows in blue the connected snaking branch of the spot B and ring B solutions
from Figure 3.4(ii) together with a stack of isolas, plotted in red and alternately in dashed and solid, along
which profiles resemble those of spot B and ring B. Panel (ii) contains the spot A curve (in dark cyan) and
the spot B branch (in blue) from Figure 3.4 together with the stacked isolas (in red) from panel (i). Note
that the isolas align well with the secondary snaking structure visible near the top of the spot A branch,
indicating that that they pinch off from the spot A branch as n is changed.
its properties in more detail below. From now on, we refer to the ring structures connected
to spot A and B as the ring A and ring B patterns, respectively. Representative profiles
of spots and rings are shown in Figure 3.5.
As indicated in Figure 3.4(i), a secondary snaking structure is visible near the upperright part of the spot A branch, where the branch oscillates between three distinct limits
rather than two: we refer to the part of the branch that oscillates between the two rightmost
folds as the secondary snaking structure. Its presence appears to be related to a stacked
family of isolated branches of spot B and ring B structures that fill the region in between the
secondary snaking structure we just discussed and the spot B branch from Figure 3.4(ii).
These isolas along with the spot B branch are shown in Figure 3.6(i) and together with
both spot branches in Figure 3.6(ii). Above the spot A branch, we found a second family of
31
�u�2L2r
µ
Figure 3.7: Shown is the first isola (in green) of a second family of stacked isolas that appears above the
spot A branch (plotted in dark cyan).
�u�2L2r
(i)
µ
�u�2L2r
(ii)
µ
Figure 3.8: The lower parts of both panels contain the connected snaking branch of spot A and
ring A (in dark cyan) from Figure 3.4. Above this branch, we found a family of stacked isolas (plotted in green) that include the isola shown in Figure 3.7. The stack of isolas extends only up to a value
of the L2r -norm at which the profiles consist of approximately 38 rolls. Above this value, we found a
single connected solution curve (drawn in brown) that consists of two intertwined branches that both
snake, seemingly indefinitely. For clarity, we show only one of the two intertwined branches in the upper part of panel (ii). Solution profiles along the upper snaking curve can be found in the accompanying
http://www.dam.brown.edu/people/mccalla/SpotABmovie.mpg.
32
stacked isolas. The first of these isolas is shown in Figure 3.7, while some of the remaining
isolas are presented in Figure 3.8(i). Along each isola, the solution profile changes in an
intricate way between the four spot and ring profiles.
The second family of isolas ends at a value of the L2r -norm that corresponds to profiles
that contain around 38 rolls. Above this value, we found another connected solution branch
that consists of two intertwined arms, each of which snakes as indicated in Figure 3.8.
Note that both of these arms oscillate back and forth between folds that align themselves
along four distinct curves. As we follow either vertical branch of the snaking curve up,
the amplitude of the pattern near the core at r = 0 oscillates up and down between the
maximum of spot A and the minimum of spot B. These oscillations create new rolls near
the core as we move up on the branch, while no new rolls are formed near the right tails of
the localized structures: this is in sharp contrast to the situation along the lower spot A
and B branches or the situation for n = 1. Note that Figure 3.8 also indicates that the
width of the top snaking branches decreases as we move up on the branch. Figure 3.9
contains log-log plots of the L2r -norm against the difference of the µ values at which folds
occur from the Maxwell point µ = 0.2 at which the fully nonlinear 1D roll patterns with
vanishing Hamiltonian have zero energy1 . These results suggests that the width shrinks
to zero as the L2r -norm goes to infinity. Note though that we do not know whether the
top branch continues upwards indefinitely or whether it, too, ends at a finite value of the
L2r -norm.
Finally, we comment in more detail on the planar spot B solutions that we encountered.
Recall that their profiles are shown in Figure 3.3. These spots differ in various ways from
the spot A patterns found in [22]. First, spot B resembles the Bessel function −J0 near
its core, and its amplitude is therefore negative near r = 0. More importantly, Figure 3.10
3
shows that the supremum norm of spot B appears to scale like µ 8 as µ approaches zero, so
1
that spot B is significantly larger than spot A, whose amplitude scales with µ 2 . Another
significant difference is that spot A was proved to bifurcate at µ = 0 from the trivial
1
Equation (0.1) is variational for n ≥ 1, and (0.2) is Hamiltonian for n = 1; see [4, 5] and references
therein for details.
33
-5
-6
-6
-7
4
5
4
5
(i)
log(−u(0))
log u(0)
Figure 3.9: The two panels show log-log plots of the two leftmost and two rightmost folds of the high
snaking branch shown in Figure 3.8, indicating that the snaking branch converges algebraically to the
Maxwell point µ = 0.2 of 1D rolls.
0.49 log µ − 0.0071
(ii)
0.374 log µ + 0.7178
log µ
log µ
1
Figure 3.10: Panel (i), reproduced from [22], indicates that the amplitude of spot A scales as µ 2 as µ
approaches zero. As shown in panel (ii), the amplitude of spot B appears to scale approximately like µ0.374 .
background state u = 0 for each fixed ν > 0 [22]. In contrast, as shown in Figure 3.11,
p
we were not able to continue spot B below ν = ν∗ = 27/38 ≈ 0.84, which is the value
at which rings cease to exist. Thus, we believe that the bifurcation mechanism that leads
to the existence of spot B solutions depends crucially on the far field even though their
profile envelopes appear to decay to zero monotonically in r.
3.3
The connection between 2D and 3D branches
The bifurcation diagram for 2 ≤ n ≤ 3 is similar to the 2D case, except that the height
and width of the isolas and the snaking branches decrease significantly as n is increased.
34
µ = 0.1
µ = 0.05
µ = 0.01
µ = 0.005
µ = 0.001
µ = 0.0005
µ = 0.0001
µ = 0.00005
!u!2L2r
ν
ν=
�
27
38
ln(µ)
ν
Figure 3.11: To delineate the existence region of spot B, we continued spot B in the parameter ν for
several fixed values of µ and visualize the resulting solution branches in two different ways: in the left
panel, we plot ν versus the squared L2r -norm (the values of µ decrease from right to left), while
p the right
panel shows log µ versus ν. Note that the solution branches stay above the critical value ν = 27/38 and
that the L2r -norm of the associated profiles goes to infinity as ν approaches the lower end of each branch.
To illustrate these behaviors, we show in Figure 3.12 the lower snaking branches of the two
spot-ring pairs and, in Figure 3.13, the upper snaking branch of the two spots for different
values of n. We do not show our computations of the family of stacked isolas between the
spot A and spot B branches or of the second family of isolas that exist between the lower
and upper snaking branches shown in Figure 3.12 and 3.13, respectively. These isolas look
qualitatively similar to those for n = 2, but they are narrower and there are fewer of them
as the height of the overall bifurcation diagram decreases.
In §3.2, we found that the width of the upper snaking branch for n = 2 shrinks as we
move up along the branch. Figure 3.13 indicates furthermore that the overall width of
these branches decreases as n increases. In addition, the two arms of the upper snaking
branch that overlap significantly for n = 2 become separate for n = 3. Even though both
of these arms lie to the left of the Maxwell point µ = 0.2, fitting the folds using a loglog plot indicates that the spine of these branches aligns itself with a curve of the form
µ = 0.2 − Ckuk−1.38
for some constant C > 0.
L2
r
Note that we used the L2r -norm in Figures 3.12 and 3.13. It might be more natural to
use the n-dependent norm
kuk2L2n :=
Z
0
∞
|u(r)|2 rn−1 dr,
(3.1)
35
�u�2L2r
(i)
Spot A
�u�2L2r
�u�2L2r
(ii)
Spot B
�u�2L2r
µ
µ
µ
µ
Figure 3.12: The bifurcation curves of spot A and spot B solutions are presented in panels (i) and (ii),
respectively, for different values of the dimension parameter n. The insets show the branches for n = 3 in
more detail.
(i)
(ii)
�u�2L2r
�u�2L2r
µ
µ
Figure 3.13: Panel (i) contains the upper snaking branches of spots for n = 2 (in brown), n = 2.3 (in
cyan), and n = 3 (in black). Panel (ii) contains the two arms of the snaking branch for n = 3 to illustrate
that they do not overlap.
or appropriate scalar multiples thereof, but since using this norm did not reveal any features
not already visible in the L2r -norm, we decided to use the latter.
3.4
The connection between 1D and 2D branches
In this section, we investigate to which of the localized 1D pulses the planar states connect
when we decrease n. Thus, we start with the planar spots and rings that we found in
§3.2 and continue them in n towards n = 1. Note that the spot and ring branches are
connected at the top for some large value of the L2r -norm and that this value increases as
n decreases. Furthermore, the associated profiles change from spots to rings only near the
36
�u�2L2x
µ
Figure 3.14: The two curves plotted in cyan diamonds correspond to the limits at n = 1 of the lower
planar spot A and spot B branches when continued in n. The profiles along these branches for n = 1
coincide with the 1D pulses shown in Figure 3.1. The solid figure-eight isolas plotted in red arise when we
continue the two ring branches from n = 2 down to n = 1 using the methods outlined in §3.1. The profiles
along each isola are symmetric 1D 2-pulses.
µ
µ
n = 1.2
�u�2L2r
n=1
µ
�u�2L2x
n = 1.2 n = 1.29 n = 1.3
µ
n = 1.3
n = 1.302
µ
µ
µ
Figure 3.15: The left panel contains the ring A branch for different values of n plotted in the planar
L2r -norm. The curve for n = 1.2 is connected but clearly shows structures that will pinch off to become
individual isolas for smaller values of n. These isolas continue to form and pinch off as the dimension
is decreased further, thus leading to isolas of 2-pulses with a given L2r -norm and an arbitrary separation
between the pulses. The right panel shows the ring A branch for n = 1.2 and n = 1.3 but now plotted in
the one-dimensional L2x -norm. Note that the curve for n = 1.2 appears to cover an entire family of what
will later become separate 2-pulse isolas at n = 1.
top of their respective branches, and we can therefore distinguish these two branches easily
and continue them separately towards n = 1.
Figure 3.14 contains the solution branches at n = 1 that we obtain when we continue
the planar spots and rings in n from two to one dimensions. As expected, the planar
spot A and spot B patterns connect to the symmetric 1D localized roll structures shown
in Figure 3.1 that have, respectively, a maximum or a minimum at r = 0. The situation
37
�u�2L2x
u(r)
µ
0
25
50
75
100
r
0
25
50
75
100
125
Figure 3.16: The left panel contains four isolas at n = 1 that are found from the two planar ring branches
through continuation in n. The right panel contains the solution profiles at the topmost intersection of
these isolas with the line µ = 0.195: the profiles in panels (a)-(b) and B come from ring A, while the profiles
in panels (c)-(d) arise from ring B. Since these profiles were computed with Neumann boundary conditions
at r = 0, they can be reflected across r = 0 and therefore correspond to 2-pulses.
for rings is more complicated, and the limiting set we obtain at n = 1 when continuing
each of the two ring branches towards decreasing n is actually a set of isolated branches
that correspond to symmetric 1D 2-pulses. The mechanism that leads from an initially
connected bifurcation curve at n = 2 to a family of isolas at n = 1 is elucidated in
Figure 3.15. As we decrease n, each ring curve becomes entangled with itself and begins
to pinch off isolas. In the left panel of Figure 3.15, we show three isolas for n = 1 that are
formed from the ring A branch and correspond to 2-pulses with similar L2r -norm. Observe
that the 2-pulse branches look quite different in the right panel of Figure 3.15, where we
plot them in the one-dimensional L2x -norm.
We remark that plotting solution branches in the n-dependent norm from (3.1) actually
obfuscates the relation between the branches for n > 1 and their limits at n = 1. The
reason is that the solutions change near r = 0 during continuation, and varying the power
of r in the norm during continuation can hide or amplify the effect of these changes. Thus,
solution branches appear better represented by using a fixed norm.
Before we address the relation between planar rings and symmetric 1D 2-pulses in more
detail, we briefly summarize some of the results for 2-pulse isolas from [21] as these will be
useful in the forthcoming discussion. As shown in [21], for each pair (s, `) of sufficiently
large integers, there are four isolas along which symmetric 1D 2-pulses exist: the parameter
38
u(r)
k=1
s=1
ks=3
=3
k=2
s=2
r
r
r
Figure 3.17: The profiles shown here at n = 1 were found through continuation from rings. Due to the
Neumann conditions imposed at r = 0, these solutions correspond to symmetric 2-pulses with different
separation distances represented by the number s of small oscillations near r = 0.
(i)
upper!
fold
(ii)
upper folds
upper!
fold
lower folds
lower!
fold
lower!
fold
Figure 3.18: When we continue an asymmetric 1D pulse that is centered some distance away from x = 0 in
n, we obtain the isolas in panel (i) which shrink and eventually disappear. Panel (ii) contains continuation
results in (µ, n) of the two upper and lower folds along the isolas. As n increases, the lower folds disappear
in a cusp, thus making the isola more circular, while the collision of the remaining upper folds corresponds
to the point at which the isola disappears.
` represents the number of large-amplitude rolls in each of the two pulses that make up the
2-pulse, while s is the number of small-amplitude oscillations in between the two 1-pulses.
Thus, s measures the separation distance of the two pulses, while ` represents the width
of each pulse. For each of the four 2-pulses that exist for a given pair (s, `), let u(r) be its
profile and denote by j the quadrant in which the pair (u(0), urr (0)) lies, then the integer
j ∈ {1, . . . , 4} characterizes the 2-pulse uniquely among the four 2-pulses. In other words,
the jth 2-pulse u(r) has (u(0), urr (0)) in the jth quadrant, where j ∈ {1, . . . , 4}.
In Figure 3.16, we plot the four isolas that belong to the same pair (s, `) in the left
panel and the associated symmetric 2-pulse profiles in panels (a)-(d), which correspond
respectively to j = 1, . . . , 4. The 2-pulses in panels (a)-(b) arise when we continue ring A
towards n = 1, while the 2-pulses in panels (c)-(d) come from the planar ring B. This is
39
consistent with the preceding discussion as the rolls contained in the two planar rings differ
by a phase shift of half their period (in the limit µ → 0, the rings are given by the Bessel
function ±J0 ). Figure 3.17 shows the profiles of 2-pulses for different values of s that we
obtained by following rings towards dimension one.
Note that we cannot be sure whether all isolas of symmetric 2-pulses are obtained from
continuing the two planar ring patterns to dimension one. In fact, it is hard to envision that
each ring branch folds up on itself infinitely often to generate a countably infinite number
of isolas for each given ring width ` as this would require the ring structures to move away
from r = 0 to generate 2-pulses for all possible separation distances s. To test whether
there are isolas that do not connect to the ring branch, we computed one of the asymmetric
localized 1D pulses that exist for n = 1 along the ladder branches shown in Figure 3.1. We
then placed this pulse at position r = r0 inside the interval [0, r1 ], where 1 r0 r1 are
chosen so that the profile is close to zero for r = 0 and r = r1 . Afterwards, we continued
this profile in n using Neumann boundary conditions. The choice of Neumann conditions
guarantees that we can view the resulting profile as a 2-pulse for n = 1 and a ring solution
for n > 1. Furthermore, the choice of r0 guarantees that the 2-pulse corresponds to a large
value of the separation parameter s. The resulting bifurcation diagrams for three different
values of n are shown in Figure 3.18. Thus, it appears as if these 2-pulse isolas shrink to
a point and disappear without connecting back to one of the ring branches. We did not
investigate systematically which of the 2-pulse isolas shrink to zero in the same fashion but
believe that this happens for all 2-pulses with larger values of s.
3.5
Discussion
The numerical explorations indicate how the localized radial patterns that exist in dimensions one to three are related to each other when the dimension parameter n is treated
as a continuous variable. In particular, we found that planar spots connect to symmetric
1D pulses, while planar rings become the symmetric 1D 2-pulses. We also resolved the
40
apparent discrepancy between snaking in 2D and non-snaking in 3D that was reported in
[22]. Our results show that neither planar nor 3D spots snake; instead, the bifurcation
diagram is similar in both cases and consists of branches that snake over a long but finite
interval which are followed by stacked isolas for sufficiently large values of the L2 -norm of
the underlying patterns.
We also found a new family of localized radial structures of the planar Swift–Hohenberg
equation that we have referred to as spot B solutions. These spots do not seem to obey
3
1
the expected µ 2 -scaling when µ goes to zero and instead seem to scale like µ 8 . They also
p
appear to exist only for values of ν above the critical value ν∗ = 27/38. The analytical
techniques used in [22] to prove the existence of planar rings and spot A states can also
be utilized to investigate the existence of spot B solutions: a preliminary formal analysis
in chapter 4 corroborates that spot B solutions exist only for ν > ν∗ and predicts an
3
amplitude scaling µ 8 ; making this formal study rigorous is the goal in chapter 4.
While our numerical computations give a quite detailed picture of the planar bifurcation diagram, we do not understand the complicated structure of different connected
solution branches that alternate with families of stacked isolas that they revealed. Perhaps
the best approach to gain a theoretical understanding of these diagrams is to carry out
a perturbation analysis of symmetric 1D pulses in the continuous bifurcation parameter
n near dimension one. Indeed, the mechanism that leads to the one-dimensional bifurcation structure shown in Figure 3.1 is well understood, and the recent dynamical-systems
investigation in [4] may allow us to carry out a perturbation analysis of
h
i2
∂r2 + ∂r + 1 u = −µu + νu2 − u3 ,
r
r ∈ R+
(5.1)
in := n − 1 near = 0. We remark though that such a perturbation analysis may turn
out to be difficult, given the complexity of the bifurcation diagrams for n > 1.
In the remainder of this section, we briefly outline a formal argument that one could
utilize when attempting to understand how radial spots of (5.1) for 0 < 1 emerge from
41
symmetric 1D pulses. First, we remark that the perturbation from = 0 is, despite its
appearance, a regular perturbation as the singularity at r = 0 for > 0 can be resolved
by choosing logarithmic variables near r = 0. Thus, we expect that each given symmetric
1D pulse persists for sufficiently small positive > 0 provided we stay away from pulses
that undergo fold or pitchfork bifurcations. Thus, the key issue is to understand pulses
whose L2 -norm is large as we cannot guarantee uniformity of the persistence interval in for such pulses (nor do we anticipate uniformity given the complex bifurcation structure
we expect to find for n > 1). To discuss the persistence of such solutions, observe that
(5.1) is Hamiltonian at = 0 with Hamiltonian given by
H(u) = ur urrr −
u2rr
(1 + µ)u2 νu3 u4
+ u2r +
−
+ .
2
2
3
4
To gain an initial understanding into the behavior of localized solutions of (5.1) for > 0,
it is natural to compute the change of the Hamiltonian along such a solution. Assuming
that u(r; ) is a family of solutions of (5.1) that is bounded in ≥ 0 and satisfies u(r; ) → 0
as r → ∞ uniformly in , we find via a straightforward calculation that
H(u(∞; )) − H(u(0; )) =
Z
0
∞
d
H(u(r; )) dr = −2
dr
Z
0
∞
[urrr + ur ]
ur
dr + O(2 ).
r
Next, assume that u resembles a spatially periodic roll pattern with wavenumber κ for
r ∈ (1, R) with R 1. Arguing now formally by assuming that these rolls are of the form
cos κr and proceeding as above, we find that
H(u(R; )) − H(u(0; )) ≈ −2
Z
1
R
[urrr + ur ]
ur
dr ≈ κ2 (κ2 − 1) log R.
r
Thus, as R increases, the wavenumber κ can stay within a bounded interval only if = 0 or
else κ approaches unity like 1/ log R. On the other hand, [5, Figure 12] shows that 1D front
solutions that connect a roll pattern with wavenumber κ to the trivial state u = 0 exist
only when κ = κc for a certain κc < 1. Hence, if we fix 0 < 1, then the wavenumber
of rolls inside an extended localized pattern needs to change along the spatial profile from
κ = 1 to κ = κc , where the solution can return to u = 0. This suggests that an analysis of
42
spots for dimensions near one needs to account for roll patterns for wavenumbers κ in an
entire interval [κc , 1].
Chapter
Four
Existence Near Onset for Spot B
in 2D
44
The existence of the ring solutions and spot A for the planar radially symmetric Swift–
Hohenberg equation was rigorously shown in [22]. In chapter 3, spot B was found numerically to exist in two and three dimensions. See figure 4.1 for a reminder of spot A and
spot B. This chapter will be devoted to rigorously showing the existence of spot B in two
dimensions. Recall the Swift–Hohenberg equation is
ut = −(1 + ∆)2 u − µu + f (u),
~x ∈ Rn ,
(0.1)
with
f (u) = νu2 − κu3 + O(u4 ).
We are interested in stationary radially symmetric solutions that decay to 0 as r → ∞. We
only study the case where 0 < µ 1; small amplitude solutions bifurcate from the trivial
state at µ = 0. The term ν > 0 is always taken as positive; the leading order analysis for
ν < 0 is identical upon taking u → −u. From here on, we will ignore the O(u4 ) terms as
they do not alter the following analysis. These solutions then satisfy
1
(∂r2 + ∂r + 1)2 u1 = −µu1 + νu21 − κu31 .
r
(0.2)
The main theorem in this section follows.
Theorem 3. Fix ν > 0 and κ ∈ R such that
c03 :=
3κ 19ν 2
−
< 0,
4
18
there exists a µ0 > 0 such that equation (0.1) has a stationary localized radial solution u(r)
for every µ ∈ (0, µ0 ). These solutions remain bounded near the trivial state u = 0 and for
3
√
a fixed r0 , they asymptotically appear as u(r) = −βµ 8 J0 (r) + O( µ) for µ → 0 uniformly
in 0 ≤ r ≤ r0 . Note β > 0.
45
Spot A
Spot B
Spot B
u
r
Figure 4.1: Spot A versus spot B.
4.1
Geometry of the rings and spots
The Swift–Hohenberg equation can be rewritten as a four dimensional first order system.
It can be made autonomous by defining the additional variable α =
1
r
which satisfies
αr = −α2 . Consider the profile of localized stationary radial solutions as the orbit of an
ordinary differential equation in the radial variable r. The solutions will be understood in
terms of three different coordinate charts: the core manifold, the transition chart, and the
rescaling chart. The rings and spot A are already understood in these various charts, and
spot B turns out to be a piecewise connection of one of the rings with spot A. See figure
4.2 for an illustration.
All solutions that remain smooth and bounded in an interval [0, r0 ] can be understood
using regular perturbation theory with Bessel functions; the resulting set is referred to as
the core manifold and forms a two-dimensional manifold. Unfortunately, the core manifold
does not capture the dynamics from the far field. For this, we need both the transition
chart and rescaling chart.
The rescaling chart tracks the exponential growth and decay of solutions as r → ∞.
46
Core
Transition
Rescaling
Ring
Spot B
Spot A
Figure 4.2: The pictured schematic represents the core manifold, the transition region, and the rescaling
chart. The core manifold, at top left, is a two-dimensional manifold that captures the smooth bounded
solutions within the interval [0, r0 ] for a fixed but finite r0 > 0. The transition chart, at bottom left, captures
the algebraic growth and decay of solutions. The rescaling chart, at right, captures the exponential decay
of solutions as the radius goes to ∞. The blue solid curves represent spot A and the ring on the left and
right respectively. The dashed red line represents spot B.
Equation (0.2) exhibits equilibria corresponding to the exponential growth and decay rates
s (µ) of these equilibria
in the rescaling chart. The goal is to track the stable manifolds W∞
back until r = r0 and then seek intersections with the core manifold. These equilibria
are hyperbolic and the accompanying stable manifolds are two-dimensional. As r → ∞,
the system becomes the Ginzburg–Landau equation. The ring solution lies near a known
solution of the Ginzburg–Landau equation, and spot B lies near the same solution in the far
field. Using this information, the stable manifold of the appropriate far-field equilibrium
can be tracked into the transition chart. Spot B only exists for c03 < 0 because the rings
only exist for c03 < 0 and spot B is a ring glued to spot A.
The transition chart coordinates track the algebraic decay rates of the solutions. Roughly
speaking, the coordinates are of the form v = r uur : equilibria of v correspond to algebraic
decay rates for u, and a solution of the form u(r) = rα maps to the equilibrium solution
v(r) = α. In this chart, there are equilibria at ± 12 corresponding to Bessel function solutions of Swift–Hohenberg at µ = 0. The ring solutions pass from the core manifold to
the positive equilibrium and then out to the far field. Spot A goes through the negative
equilibrium on its way from the core manifold to the far field. In Figure 4.2, an illustration
of the spot and ring solutions is shown in the context of the three different regions.
47
Spot B passes by both equilibria. Starting with the section of the stable manifold in
the transition chart near to the equilibrium at 21 , we integrate in backwards time around
the fixed point. A diffeomorphism is then used to pass from this equilibrium to − 12 . The
section is then propagated around the last fixed point and matched to the core manifold.
In this way, spot B is shown to exist.
Many of the preliminary steps in this proof were drawn directly from [22]. We will
begin by reviewing the appropriate sections from that paper. Afterwards, we will present
a formal calculation for the existence of spot B that predicts the proper scaling of the
amplitude and provides intuition for the proof.
4.2
Life at the core
Equation (0.1) can be rewritten as the following system:
(∂ 2 + 1 ∂r + 1)u1 = u2
r
r
(2.1)
(∂r2 + 1 ∂r + 1)u2 = −µu1 + νu21 − κu31 .
r
This can be recast as a first order system
Ur = AU + F(U, µ),
0
0
0
0
A=
−1 1
0 −1
1
0
− 1r
0
0
1
,
0
1
−r
(2.2)
0
0
F(U, µ) =
.
0
2
3
−µu1 + νu1 − κu1
For any fixed but finite r0 > 0, the small radially symmetric solutions of equation (2.2) that
are bounded and smooth in an interval [0, r0 ] were characterized in [22] and are referred
to as the core region. System (2.2), when linearized about U = 0 with µ = 0 to give
Ur = AU , has a set of four linearly independent solutions Vi . These are in terms of the
48
Bessel functions Jk and Yk of the first and second kind. Quoting [22, Equation (2.4)],
V1 (r) =
√
V2 (r) =
√
V3 (r) =
√
V4 (r) =
√
2π(J0 (r), 0, −J1 (r), 0)T ,
2π(rJ1 (r), 2J0 (r), rJ0 (r), −2J1 (r))T ,
2π(Y0 (r), 0, −Y1 (r), 0)T ,
2π(rY1 (r), 2Y0 (r), rY0 (r), −2Y1 (r))T .
The core manifold is a two-dimensional manifold in R4 for fixed r0 , and we denote the
projection onto the space spanned by V1,2 (r0 ) as P−cu (r0 ). P−cu (r0 ) has the span of V3,4 (r0 )
as its null space. We may now recall the following lemma.
Lemma 2.1 ([22, Lemma 1]). Fix n = 2 and r0 > 0, then there are constants δ0 , δ1 > 0 so
that the set W−cu (µ) of solutions U (r) of (2.2) for which sup0≤r≤r0 |U (r)| < δ0 is, for |µ| <
δ0 , a smooth two-dimensional manifold. Furthermore, U ∈ W−cu (µ) with |P−cu (r0 )U (r0 )| <
δ1 if and only if
˜ + |d|
˜ 2)
U (r0 ) = d˜1 V1 (r0 ) + d˜2 V2 (r0 ) + V3 (r0 )Or0 (|µ||d|
1
2
3
2
˜
˜
˜
˜
+V4 (r0 ) √ + o(1) ν d1 + Or0 (|µ||d| + |d1 | + |d2 | ) .
3
(2.3)
˜ < δ1 , where the right-hand side in (2.3) depends
for some d˜ = (d˜1 , d˜2 ) ∈ R2 with |d|
˜ µ), and o(1) is the Landau symbol in r0 as r0 → ∞.
smoothly on (d,
−1
The o(1) estimate can be improved to O(r0 2 ). This both simplifies our notation and
the final step in the proof of theorem 3.
Lemma 2.2. Equation (2.3) can be replaced by
˜ + |d|
˜ 2)
U (r0 ) = d˜1 V1 (r0 ) + d˜2 V2 (r0 ) + V3 (r0 )Or0 (|µ||d|
1
− 12
2
3
2
˜
˜
˜
˜
+V4 (r0 ) √ + O(r0 ) ν d1 + Or0 (|µ||d| + |d1 | + |d2 | ) .
3
(2.4)
Proof. In the proof of [22, Lemma 1], the quadratic coefficient in d˜1 in front of V4 (r0 ) is
49
found by evaluating the integral
πν
4
Z
r0
0
πν
sJ0 (s) ds =
4
3
Z
0
∞
sJ0 (s) ds + o(1) .
3
The o(1) term accounts for the integral of the tail. The J0 Bessel function, as r → ∞, has
q
3
2
the expansion πr
cos(r − π4 ) + O(r− 2 ): see [1, (9.1.10), (9.1.11) and section 9.2] or [22,
Table 1]. We will use this asymptotic form to calculate the contribution of the tail integral
Z
∞
sJ0 (s)3 ds =
r0
=
Z
∞
s
r0
√ Z
2 2
r
3
π
2
cos(s − ) + O(s− 2 )
πs
4
!3
ds
3
1
π
√ cos3 (s − ) + O(s− 2 )ds
4
s
r
π
"0
r !
r !!
r !
r !#∞
r √
2s
2s
6s
6s
1
1
√ 3 3 S
=
+C
+S
−C
+O
π
π
π
π
r0
π 6
r0
r 1
.
= O
r0
=
∞
3
2
The functions S(s) and C(s) are the Fresnel sine and cosine integrals, respectively, and the
asymptotic form for the Fresnel functions is found from [27, Chapters 7.5, 7.12].
4.3
Normal forms
We start from equation (2.2) to understand the solution for large r of the stationary radial
Swift–Hohenberg equation. We can treat this as an autonomous equation by adding the
variable α =
1
r.
Here we are interested in the far field which implies 0 < α 1. This
variable is governed by the additional differential equation αr = −α2 . Equation (2.2) can
50
then be recast as
u1
u3
u2
u4
d
.
u =
−u1 − αu3 + u2
3
dr
u4 −u2 − αu4 − µu1 + νu21 − κu31
−α2
α
(3.1)
Following [15, 22, 34], we use the normal form coordinates
1
0
0
2i
U = Ã + B̃ + c.c.
i
1
0
−2
(3.2)
which are equivalent to
à 1 2u1 − i(2u3 + u4 )
=
,
4
B̃
−u4 − iu2
U = (u1 , u2 , u3 , u4 )T .
(3.3)
The equation, transformed into these coordinates, becomes
α
α
à + B̃ + ï + O (|µ| + |Ã| + |B̃|)(|Ã| + |B̃|)
2
2 α
α¯
=
i−
B̃ − B̃ + O (|µ| + |Ã| + |B̃|)(|Ã| + |B̃|)
2
2
Ãr =
B̃r
i−
(3.4)
αr = −α2 .
Let α0 := r0−1 and ε2 := µ. We can now use theory developed in [34] to transform this
equation into a more useful form.
Lemma 3.1 ([22, Lemma 2]). Fix 0 < m < ∞, then there is a change of coordinates
A
Ã
−iφ(r)
[1 + T (α)] + O (|ε|2 + |Ã| + |B̃|)(|Ã| + |B̃|)
=e
B
B̃
(3.5)
51
such that (3.4) becomes
α
Ar = − A + B + RA (A, B, α, ε)
2
α
ε2
Br = − B + A + c03 |A|2 A + RB (A, B, α, ε)
2
4
(3.6)
αr = −α2 .
The transformation (3.5) is polynomial in (A, B, α), smooth in ε. T (α) = O(α) is linear
and upper triangular for each α. The function φ(r) satisfies
φr = 1 + O(ε2 + |α|3 + |A|2 ),
The constant is c03 =
3κ
4
−
19ν 2
18 .
φ(0) = 0.
(3.7)
The remainder terms are
RA (A, B, α, ε)
2
X
= O
|Aj B 3−j | + |α|3 |A| + |α|2 |B| + (|A| + |B|)5 + |ε|2 |α|m (|A| + |B|)
(3.8)
j=0
RB (A, B, α, µ)
1
X
= O
|Aj B 3−j | + |α|3 |B| + |ε|2 (|ε|2 + |α|3 + |A|2 )|A| + (|A| + |B|)5 + |ε|2 |α|m |B| .
j=0
The core manifold must be transformed into the (A, B)-coordinates given by (3.5) before
we can map them into our transition chart coordinates and match them to the far-field.
The core manifold is mapped into (A, B) in [22, Equation (3.23)]
2
2
2
A
W−cu (ε)|α=α0 : = ei[−π/4+O(α0 )+Oα0 (|ε| +|d| )]
(3.9)
B
q
√ ˜
−1 ˜
2
2
˜
˜
α0 d1 [1 + O(α0 )] − α0 d2 [i + O(α0 )] + Oα0 (|ε| |d| + |d| )
×
.
√
√ ˜
√
√ ˜2
2
2
3
˜ + |d˜2 | + |d˜1 | )
− α0 d2 [i + O(α0 )] − [1/ 3 + O( α0 )]ν α0 d1 + Oα0 (|ε| |d|
52
Summary:
We have now collected all the necessary results from [22]. From this, we
have the normal form coordinates for the equations in the far-field and the core manifold
in these coordinates. We still must transform everything into our rescaling and transition
charts and match the far-field to the core manifold. The next section will establish the
rescaling coordinates between the far-field and matching regimes.
4.4
The rescaling chart
The rescaling coordinates are
A
ε
−αA/2 + B
z
=
=
ε
εA
√
= ε= µ
A2 =
z2
ε2
α2 =
(4.1)
α
ε
s = εr.
The Swift–Hohenberg equation expressed as (3.6), in these coordinates, becomes the system
Ar
B̃ 1
=
+ RA
ε
ε
ε
1
= εA2 z2 + RA
ε
1
= ε A2 z 2 + 2 R A
ε
∂r A2 =
53
and
∂r z2 =
=
"
#
1 B̃r
B̃
− 2 Ar
ε A
A
" 2
#
1 α4 A + 14 µA + c03 |A|2 A − αB̃ + αRA + RB
B̃
− 2 (B̃ + RA )
ε
A
A
εα22 1
RB
c0
z2 + α2
RA + 2
+ ε + 3 |εA2 |2 − εα2 z2 − εz22 +
4
4
ε
εA2
ε A2
1 + α22
1
z 2 + α2
0
2
2
= ε
RA + 3 RB .
+ c3 |A2 | − α2 z2 − z2 + 2
4
ε A2
ε A2
=
We want to change our evolution variable r into s = εr. The calculations for the remainders
are straightforward and tedious:
α2 RA ε2 A2 , ε22 A2 z2 +
, α2 ε2 , ε2 =
(4.2)
2
2
X
= O
|Aj B 3−j | + |α|3 |A| + |α|2 |B| + (|A| + |B|)5 + |ε|2 |α|m (|A| + |B|)
j=0
= |A2 |O |ε2 |4 + |ε2 |3+m |α2 |m
and
α2 RB ε2 A2 , ε22 A2 z2 +
, α2 ε2 , ε2 =
(4.3)
2
1
X
= O
|Aj B 3−j | + |α|3 |B| + |ε|2 (|ε|2 + |α|3 + |A|2 )|A| + (|A| + |B|)5 + |ε|2 |α|m |B|
j=0
= |A2 |O |ε2 |5 + |ε2 |4+m |α2 |m .
The remainders in the rescaling chart are all found to be of order O(|ε2 |2 ). We arrive at
the equation in the rescaling chart
∂s A2 = A2 z2 + O(|ε2 |2 )
∂ s z2 =
1+
4
α22
∂ s ε2 = 0
∂s α2 = −α22 .
+ c03 |A2 |2 − α2 z2 − z22 + O(|ε2 |2 )
(4.4)
54
Summary:
s (ε) back in time we need to convert it into the transition
Once we follow W∞
chart coordinates (5.1). The next section derives equation (3.6) in the transition chart
s (ε) back in time up to the matching point α = α .
coordinates so that we may follow W∞
0
4.5
The transition chart
We transform (3.6) into coordinates (A1 , z1 ) such that z1 is approximately the algebraic
decay rate of the solutions. Let z and τ be defined by z = − α2 +
B
A
and eτ = r. Then the
matching coordinates are
A1 =
z1 =
ε1 =
A
α
z
1
B
=− +
α
2 αA
ε
α
α1 = α.
These satisfy the equations
∂ r A1 =
Ar
Aαr
− 2
α
α
1
= αA1 + αA1 z1 + RA
α
1
= α A1 + A1 z1 + 2 RA
α
and
Br
BAr
Bαr
−
− 2
2
αA
αA
α A
α
ε2
B − α2 A + B + RA
− 2 B + 4 A + c03 |A|2 A + RB
B
=
−
+
2
αA
αA
A
2
1
z
+
ε2
1
1
1
1
2
=
+ αc03 |A1 |2 − α z1 +
+ α z1 +
−
RA + 2 RB
4α
2
2
αA1
α A1
"
#
1
z1 +
1 ε2
1
= α −z12 + + 1 + c03 |A1 |2 − 2 2 RA + 3 RB
4
4
α A1
α A1
∂r z1 =
(5.1)
55
where RA and RB are now evaluated at (A, B) = (A, α2 A1 z1 +
α2 A 1
2 ).
We also need the r
derivatives of ε1 and α1 which are
∂r ε1 = −
εαr
= ε = αε1
α2
∂r α1 = −αα1 .
This finally gives the equation in the transition chart
∂τ A1 = A1 [1 + z1 ] +
∂τ z1 = −z12 +
1
RA
α2
(5.2)
z1 + 1
1 + ε21
1
+ c03 |A1 |2 − 2 2 RA + 3 RB
4
α A1
α A1
∂τ ε1 = ε1
∂τ α1 = −α1 .
We still need to find RA and RB in terms of (A1 , z1 ). It will be important to show the
remainders in (5.2) vanish when A1 = 0, ε1 = 0 and z1 = − 21 . Introduce the coordinate
z− = z 1 +
1
2
then, abbreviating the algebraic details,
z−
1
2
RA (α1 A1 , α1 A1 z1 +
, α1 , α12 ε21 ) =
α2 A1
2
2
X
z−
=
O
|Aj B 3−j | + |α|3 |A| + |α|2 |B| + (|A| + |B|)5 + |ε|2 |α|m (|A| + |B|)
α 2 A1
j=0
=
2
X
z−
O
|(α1 A1 )j (α12 z− A1 )3−j | + |α1 |3 |α1 A1 | + |α1 |2 |α12 z− A1 |
α12 A1
j=0
!
+(|α1 A1 | + |α12 z− A1 |)5 + |α12 ε21 ||α1 |m (|α1 A1 | + |α12 z− A1 |)
z−
O |α1 |4 |A1 | + |ε21 ||α1 |m+3 |A1 |
2
α 1 A1
= z− O |α1 |2 + |ε21 ||α1 |m+1
= z− O |α1 |2
=
56
and
1
α3 A
=
1
RB ((α1 A1 ), (α12 A1 z− ), α1 , α12 ε21 ) =
(5.3)
1
X
1
O
|Aj B 3−j | + |α|3 |B| + |ε|2 (|ε|2 + |α|3 + |A|2 )|A|
α 3 A1
j=0
!
+(|A| + |B|)5 + |µ||α|m |B|
=
1
X
1
O
|(α1 A1 )j (α12 A1 z− )3−j | + |α1 |3 |α12 A1 z− |
α13 A1
j=0
+|ε1 α1 |2 (|ε1 α1 |2 + |α1 |3 + |α1 A1 |2 )|α1 A1 |
+(|α1 A1 | + |α12 A1 z− |)5 + |ε1 α1 |2 |α1 |m |α12 A1 z− |
!
1
5
5
5
2
5
2
m+4
O
|α
|
|A
|
+
|α
|
|A
||z
|
+
|ε
|
|α
|
|A
|
+
|ε
||α
|
|A
z
|
1
1
1
1
−
1
1
1
1
1
−
1
α13 A1
= |α1 |2 O |A1 |4 + |z− | + |ε1 |2 .
(5.4)
=
Reiterating the transition chart equation with the remainders included gives
∂τ A1 = A1 1 + z1 + O(|α1 |2 )
∂τ z1 = −z12 +
1+
4
ε21
∂ τ ε1 = ε1
0
2
2
+ c3 |A1 | + |α1 | O |A1 | + z1 +
1 + |ε1 |
2
(5.5)
∂τ α1 = −α1 .
These are the coordinates we will use for the matching, so it is important to express the
core manifold in terms of them. The computation is straightforward and results in
W−cu (ε)|α=α0 :
(5.6)
2
2
2
A1 = ei[−π/4+O(α0 )+Oα0 (|ε| +|d| )]
1
−2
−3/2 ˜
2 ˜
2
˜
˜
× α0 d1 [1 + O(α0 )] − α0 d2 [i + O(α0 )] + Oα0 (|ε| |d| + |d| )
√
√
˜ + |d˜2 |2 + |d˜1 |3 )
1 −d˜2 [i + O(α0 )] − [1/ 3 + O( α0 )]ν d˜21 + Oα0 (|ε|2 |d|
z1 = − +
.
˜ + |d|
˜ 2)
2
α0 d˜1 [1 + O(α0 )] − d˜2 [i + O(α0 )] + Oα (|ε|2 |d|
0
57
Summary:
Most of the computations will be done in these coordinates. As we already
have the core manifold at the matching point r = r0 , it remains to understand the props (ε) around the equilibria at z = ± 1 . These computations will comprise
agation of W∞
1
2
most of the analysis in this chapter. The transition and rescaling charts are related by the
following transformations:
A1 =
4.6
A2
,
α2
z1 =
z2
,
α2
ε1 =
1
,
α2
α1 = ε2 α2 = εα2 .
The fixed points
Because we will be examining the flow around the two equilibria in the matching regime,
we want to use coordinates where the fixed points are located at the origin. The equation
in the transition chart is
∂τ A1 = A1 1 + z1 + O |α1 |2
∂τ z 1 =
−z12
∂ τ ε1 = ε1
1 + ε21
1
0
2
2
+
+ c3 |A1 | + |α1 | O |A1 | + |z1 + | + |ε1 |
4
2
∂τ α1 = −α1 .
We find two fixed points given by p± := (A1 , z1 , ε1 , α1 ) = (0, ± 21 + O(ε1 ), 0, 0). We can
better understand the dynamics around the fixed points by changing to appropriate coordinates. First around the equilibrium p+ using z+ = z1 −
P+ :
∂ τ A+
∂τ z+
1
2
gives
3
2
= A+
+ z+ + O |α+ |
2
ε2
2
= −z+ − z+
+ + + c03 |A+ |2 + O |α+ |2
4
∂τ ε+ = ε+
∂τ α+ = −α+ .
(6.1)
58
Repeating this procedure with the coordinates z− = z1 +
1
2
(around the p− fixed point)
leads to
P− :
∂τ A−
∂τ z −
1
2
= A−
+ z− + O |α− |
2
ε2
2
= z− − z−
+ − + c03 |A− |2 + |α− |2 O (|A− | + |z− | + |ε− |)
4
(6.2)
∂τ ε− = ε−
∂τ α− = −α− .
Remark 6.1. The same proof of existence could be attempted for u ∈ R3 but the equilibrium
corresponding to P− loses hyperbolicity in the A1 direction. The coefficient of the A− term
changes from
1
2
to 0. From this, we would expect logarithmic terms to arise when we
integrate around this equilibrium. This could cause problems for the final matching.
Summary:
The P+ coordinates move the origin to (A1 , z1 ) = (0, 21 ), while P− centers
it at (A1 , z1 ) = (0, − 21 ). In P+ , the origin is a hyperbolic equilibrium. The linearized
system has decaying eigenvector along the z+ direction and growing eigenvector in the A+
direction. On the other hand, P− exhibits growth along both directions. See figure 4.7 for
a picture.
4.7
The formal argument in two dimensions
3
Our goal is to find a simple argument that explains how the scaling of µ 8 arises. In this
section, we will proceed formally and loosely: we will immediately drop all higher order
terms and set every allowable constant to one. Additionally we will restrict ourselves to
real variables, the normal form coordinates. Then, for c03 < 0 and ν > ν∗ , there is a ring
solution connecting the far field to the equilibrium p+ . The intersection of the unstable
s (µ) is transverse in the real coordinates. This enables us to follow
manifold of p+ and W∞
s (µ) that lies near (A , z ) = (−η, 0) = (−1, 0) until τ =
a piece of W∞
+ +
1
r0
= 1. This is
59
Core
Transition
Rescaling
Ring
Spot B
Spot A
s
cu
Figure 4.3: The solid blue curve for the ring lies in the transverse intersection of W∞
and W−
. We can
s
find starting data near (A+ , z+ ) = (−η, 0) in W∞ .
done first by moving from the section defined by ε1 = ε01 = 1 into the section z+ = − 21
using the linearized flow around p+ . We then switch to the linearized flow in P− to track
all the way back in time to our matching point. Finally we find the intersections between
s (µ) at r = 1. Consider the equation in the
the core manifold and this segment of W∞
0
transition chart
∂τ A1 = A1 [1 + z1 ] + O |α1 |2 |A1 |
∂τ z1 = −z12 +
∂τ ε1 = ε1
1 ε21
+
+ c03 |A1 |2 + O |α1 |2
4
4
∂τ α1 = −α1 .
As mentioned at the start of the section, we will work with the simplified equations
∂τ A+ =
3
A+
2
(7.1)
∂τ z+ = −z+
around p+ and
∂τ A− =
1
A−
2
∂τ z − = z −
(7.2)
60
around p− . We actually desire a more general argument than this would provide, so in the
charts P+ and P− , respectively, we will study the equations
∂τ A+ = aA+
(7.3)
∂τ z+ = −z+
and
∂τ A− = bA−
(7.4)
∂τ z − = z − .
Recall equation (5.6) for the core manifold in the transition chart coordinates
W−cu (µ)|r=r0 :
2
2
A1 = ei[−π/4+O(1/r0 )+Or0 (|µ|+|d| )]
h√
i
3/2
˜ + |d|
˜ 2)
× r0 d˜1 [1 + O(r0−1 )] − r0 d˜2 [i + O(r0−1 )] + Or0 (|µ||d|
√
√
˜ + |d˜2 |2 + |d˜1 |3 )
1 −d˜2 [i + O(r0−1 )] − [1/ 3 + O( α0 )]ν d˜21 + Or0 (|µ||d|
,
z1 = − +
˜ + |d|
˜ 2)
2
d˜1 /r0 [1 + O(r−1 )] − d˜2 [i + O(r−1 )] + Or (|µ||d|
0
0
0
which we reduce to
W−cu (µ)|r=1 :
A1 = d˜1 − id˜2
1 −id˜2 − d˜21
z1 = − +
.
2
d˜1 − id˜2
By setting d˜2 = 0, we can write down an estimate for the core at the matching point
A1 = d˜1
(7.5)
1
z1 = − − d˜1 .
2
We need to know how long to follow the flow until we land at the matching point r = 1.
61
In other words, starting from the assumption at τ = 0 that ε1 = 1 and letting −T be the
time such that α1 (−T ) = 1 we find
T = − ln ε.
s is given by (A , z ) = (−1, −y) with y > 0. Equation
Assume the stable manifold W∞
+ +
(7.3) admits solutions
A+ = −eaτ ,
z+ = −ye−τ ,
τ ≤ 0.
1
From this, we can deduce the time τ+ when z+ (τ+ ) = − 21 = −ε 4 y and extract τ+ = ln y
where we have again changed an unimportant constant to one. Plugging this in, we find
A1 (τ+ ) = −eaτ+ = −y a
z1 (τ+ ) = 0.
Now we have the amount of time we need to integrate around P−
ε
τ− = ln ε − ln y = ln .
y
Solving equation (7.4) from (A− (0), z− (0)) = (−y a , 12 ) for time τ− = ln yε gives
A− = −y a ebτ− = −y a
z− = eτ− =
εb
= −y a−b εb
yb
ε
.
y
Now recall (7.5) to find
A1 = d˜1 = −y a−b εb
z− = −d˜1 = y a−b εb .
62
Matching to the core in the z− component and solving tells us
1−b
y a−b+1 = ε1−b ⇒ y = ε a−b+1 .
Equivalently, the final amplitude of the J0 Bessel function in the core is given by
d˜1 = −y a−b εb = −εb ε a−b+1 (1−b) = ε a−b+1
a−b
a
a
= µ 2(a−b+1)
For spot B, a =
3
2
(7.6)
3
3
and b = 21 . This results in the scaling d˜1 = ε 4 = µ 8 . The above
s with Wcu .
calculation has additionally told us the initial offset necessary to match W∞
−
1−b
1
Note that y = ε a−b+1 ⇒ y = ε 4 for our system. We will assume an offset of this form in
1
the proof of the theorem: y = ε 4 x.
The eigenvalues around both fixed points p± contribute to the final scaling. In order
to understand the scaling of similar systems in general, we would need to have a detailed
understanding of the eigenvalues and the flow around all the fixed points.
Summary:
3
Notice that the unusual scaling of µ 8 , the negative value at the origin, and
the existence region coupled to the ring all arise naturally from the formal argument. The
main difficulties for a rigorous proof involve integrating the full equations with nonlinearities around the different fixed points.
4.8
The flow around the equilibria in the transition chart
In this section, we establish several lemmas needed to prove the main theorem. They govern
how the flow moves between and around the different equilibria. With these lemmas in
hand, we can propagate the solutions backwards from r = ∞ to r = r0 and then match
63
with the core manifold to complete the proof.
4.8.1
Transversality and the ring:
The formal argument relies on the existence of an orbit between fixed points in the transition and rescaling charts. The orbit should exist in the plane defined by α1 = 0 and ε2 = 0
as illustrated in Figure 4.4. Its existence follows from the work of [33]: in appropriate
coordinates, the equation in the invariant plane matches the equation studied by Scheel.
Consider the coordinates (a, b) from [22] that are related to our coordinates (A, B) via
A=
so that b = as +
a
2s .
√
µa,
B = µb,
s
r=√
µ
In these coordinates the far field equation, ignoring remainders,
becomes
ass = −
as
a
a
+ 2 + + c03 |a|2 a.
s
4s
4
(8.1)
We want to understand the implications of [22, Lemma 4] for our equation in the different
charts.
Lemma 8.1 ([22, Lemma 4]). Assume that c03 < 0, then, for each integer n ≥ 0, equation
(8.1) has a bounded nontrivial real solution a(s) = qn (s) that has precisely n simple zeros
√
for s ∈ (0, ∞) and satisfies qn (s) = O( s) as s → 0 and (qn , qn0 )(s) → 0 exponentially
as s → ∞. Furthermore, the linearization of (8.1) about qn (s) does not have a nontrivial
real-valued solution that is bounded uniformly on R+ . If c03 > 0, then the only bounded
solution of (8.1) on R+ is a(s) ≡ 0.
We can translate this into the following result for our system.
Lemma 8.2. For ε = 0 and c03 < 0, there is a locally unique solution connecting the equilibrium (A1 , z1 ) = (0, 21 ) in the transition chart to the equilibrium (A2 , z2 ) = (0, − 21 ) in the
rescaling chart. Also, in the real subspace, which is invariant for α1 = 0, the unstable man-
64
α1
ε2
1
(A1 , z1 ) = (0, )
2
Invariant Plane: (α1 = ε2 = 0)
1
(A2 , z2 ) = (0, − )
2
Figure 4.4: A cartoon of the orbit. We are looking for a ring solution that lies in the invariant plane
where α1 = 0 and ε2 = 0. The remainder terms in both the transition and rescaling chart then drop out
and we are left with (8.1).
ifold of (A1 , z1 ) = (0, 12 ) transversely intersects the stable manifold of (A2 , z2 ) = (0, − 21 ).
In R2 this structure persists up to O(ε) corrections for all sufficiently small 0 < ε 1.
Proof. First, the charts, and consequently solutions of (5.5), (4.4) and (8.1), are related
by the transformations
A2 = a,
A1 = as,
1
b
+ ,
2s a
1 sb
z1 = − + ,
2
a
z2 = −
s = α2−1
ε1 = s,
(8.2)
ε
α1 = .
s
Recall the transition chart,
∂τ A1 = A1 [1 + z1 ] + A1 O |α1 |2
∂τ z1 = −z12 +
∂τ ε1 = ε1
1 ε21
+
+ c03 |A1 |2 + O |α1 |2
4
4
∂τ α1 = −α1 ,
and note that the remainder terms disappear when α1 = 0. We are then firmly in the
situation of Lemma 8.1. From the lemma, we know the asymptotic form of qn (s) as s → 0.
65
Also recall b = as +
a
2s
√
√
and as s → 0 then qn (s) = c1qn s + o( s). Note c1qn 6= 0: for
all sufficiently small values of c1qn > 0, all solutions of this form are strictly positive away
from the origin [33]. The only exception for c1 = 0 is the trivial solution. Looking at the
asymptotics in the transition chart,
3
3
A1 (s) = as = c1qn s 2 + o(s 2 ) → 0 as s → 0
1 sb
1 s
a
z1 (s) = − +
=− +
as +
2 a
2 a
2s
1
sas
sas 1
=− +
=
+
2
a
2
a
√
√
1
cq s + o( s)
1
√ → as s → 0,
= 1n √
2
2cqn s + o( s)
we see that the solution associated with qn via (8.2) is in the unstable manifold of the
equilibrium (A1 , z1 ) = (0, 21 ).
The rescaling chart is given by
∂s A2 = A2 z2 + O(|ε2 |2 )
∂s z2 =
1 1 2
+ α + c03 |A2 |2 − α2 z2 − z22 + O(|ε2 |2 )
4 4 2
∂s ε2 = 0
∂s α2 = −α22 .
Again, the remainders disappear when confined to the invariant plane given by α1 = ε2 = 0.
To understand the solution in the rescaling chart, we must use as s → ∞ then qn (s) =
−s/2
−s/2
cs e √s + o( e √s ) with cs 6= 0 and o(1) → 0 as s → ∞. See Lemma 2.1 in the appendix.
The limit in the far field as s → ∞ is
e−s/2
e−s/2
A2 (s) = a = cs √ + o( √ ) → 0 as s → ∞
s
s
1
b
1
1
a
1
as
1
as
z2 (s) = − + = − +
as +
=− +
+
=
2s a
2s a
2s
2s
a
2s
a
e−s/2
1
e−s/2
1
1
√
√
−cs 2 s 1 + s + o( s )
− 1 + s + o(1)
1
=
= 2
→ − as s → ∞.
−s/2
−s/2
e√
e√
1
+
o(1)
2
cs s + o( s )
66
The solutions qn belong in the stable manifold of the equilibrium (A2 , z2 ) = (0, − 21 ). This
means the solution qn lies in the intersection of the stable and unstable manifolds of the
equilibria discussed above. This intersection is transverse in R2 by lemma 8.1 and locally
unique because there are no real-valued nontrivial uniformly bounded solutions to the
linearized equation around the solution qn . Everything depends smoothly on ε and the
intersection of the manifolds is transverse thus this all persists with small perturbations,
though we expect O(ε) changes to the equilibria and solutions.
Remark 8.3. The real heteroclinic orbit arising from qn can be rotated by an arbitrary
phase, eiγ for any γ ∈ R, to produce a one parameter family of heteroclinic connections in
s . The phase component eiγ only multiplies the A component in the stable manifold
W∞
1
s as it cancels in the z component. We will need to choose γ to solve the matching
W∞
1
s .
equation between the core manifold and W∞
Summary:
This crucially provides our starting data in the transition chart coordinates.
Additionally, it provides us with a range of starting values near to the P+ equilibrium for
an appropriately small choice of µ. We need this freedom to find the intersections between
the core and far-field.
4.8.2
P+ :
Recalling the formal analysis, spot B looks like a ring solution and a spot A solution glued
together somewhere in the transition chart. We first must understand the flow around
the equilibrium at z1 =
1
2
near the solution predicted by [33]. Refer to figure 4.5 for a
picture. This corresponds to pulling the ring back from the far field and looking at it in the
transition regime. After moving the p+ fixed point to the origin through the coordinates
67
P + A1
p+
ε1! = "ε01
1
,0
2
z1
−η
−δ+
s
W∞
ε1
s
Figure 4.5: The equilibrium at (z1 , A1 ) = ( 21 , 0) is pictured. A segment of W∞
is drawn in red. By choosing
the appropriate point on this manifold, the matching equations are solved. We need to understand how
this segment is affected by the flow between and around the two equilibria.
z+ := z1 −
1
2
we arrive at the equation
3
2
∂ τ A+ = A+
+ z+ + O |α+ |
2
ε2
2
∂τ z+ = −z+ − z+
+ + + c03 |A+ |2 + O |α+ |2
4
(8.3)
∂τ ε+ = ε+
∂τ α+ = −α+ .
Several low-order non-resonant terms in the z+ equation cause difficulties when we try to
solve. We have to transform them away. We will do this calculation in two steps: first
2 ) terms and then we will
we explicitly write down transformations to eliminate the O(α+
flatten out the unstable manifold.
68
Lemma 8.4. Equation (8.3) can be brought into the form
3
∂τ A+ = A+
+ O (|A+ | + |ẑ+ | + |ε+ | + |α+ |)
2
i
hε
+
2
2
2
+ α+
ĝ2 + A+ c03 A+ + α+
ĝ3
∂τ ẑ+ = −ẑ+ 1 + ẑ+ + α+
ĝ1 + ε+
4
(8.4)
∂ τ ε+ = ε+
∂τ α+ = −α+
with ĝ1 = ĝ1 (A+ , ẑ+ , ε+ , α+ ) and ĝ2,3 = ĝ2,3 (A+ , ε+ , α+ ) through a smooth transformation
of the form ẑ+ = z+ + f (α+ ) where f (α+ ) = O(|α+ |2 ).
2 ).
Proof. We want a coordinate change of the form ẑ+ = z+ + f (α+ ) with f (α+ ) = O(α+
Upon taking the derivative of this expression, we find
∂τ ẑ+ = ∂τ z+ + f 0 (α+ )∂τ α+
2
=: g(A+ , ẑ+ , ε+ , α+ ) + α+
g̃(α+ , f (α+ )) − α+ f 0 (α+ )
with g(0, 0, 0, α+ ) = 0 for all α+ . We have decomposed the original equation into terms
that are functions solely of α+ and those that are not. The terms that are solely functions
2 ) because this is the lowest order that appeared in the original
of α+ must be at least O(α+
equation, and our transformation is also of this order. We want to remove them through
our choice of f . In this equation, both g and g̃ depend on f (α+ ) which is still unknown. We
can determine them by substituting z+ = ẑ+ − f (α+ ) into the right hand side of equation
2 ) terms means solving
(8.3). Removing O(α+
2
α+
g̃(α+ , f (α+ )) = α+ f 0 (α+ )
f 0 (α+ ) = α+ g̃(α+ , f (α+ ))
which is an ODE for f with initial condition f (0) = 0. This IVP has a unique solution,
2 ) as claimed. This second statement follows because
f (α+ ), and additionally f (α+ ) = O(α+
f 0 (α+ ) = O(α) which is clearly seen from the ODE and f (0) = 0. This f defines our desired
69
transformation. The equation for ẑ+ becomes
∂τ ẑ+ = g(A+ , ẑ+ , ε+ , α+ )
2
= −ẑ+ − ẑ+
+
ε2+
2
+ c03 |A+ |2 + α+
[A+ ĝ1 + ẑ+ ĝ2 + ε+ ĝ3 ]
4
with ĝi (A+ , ẑ+ , ε+ , α+ ) well-defined and smooth. Remember no terms that solely depend
2 [A + ẑ + ε ]) contributions immediately come
on α+ appear in g by definition, but O(α+
+
+
+
2 ) in the original equation. In a slightly different form this is
from the O(α+
i
hε
+
2
2
2
+ α+
ĝ2 + A+ c03 A+ + α+
ĝ3
∂τ ẑ+ = −ẑ+ 1 + ẑ+ + α+
ĝ1 + ε+
4
with ĝ1 = ĝ1 (A+ , ẑ+ , ε+ , α+ ) and ĝ2,3 = ĝ2,3 (A+ , ε+ , α+ ). As we have changed only the z+
coordinate, and it only appears in higher order terms in the A+ component, we are now
done.
Our next step is to flatten the unstable manifold of equation (8.4). We want to show this
can be done through another transformation solely on the ẑ term.
Lemma 8.5. There exists a smooth coordinate change z̃+ = ẑ+ +G(A+ , ε+ ), with G(A+ , ε+ ) =
O(|A+ |2 + |ε+ |2 ), in which equation (8.4) becomes
∂ τ A+ = A+
3
+ O (|A+ | + |ε+ | + |α+ | + |z̃+ |)
2
(8.5)
∂τ z̃+ = −z̃+ [1 + O (|A+ | + |ε+ | + |α+ | + |z̃+ |)]
∂ τ ε+ = ε+
∂τ α+ = −α+ .
Proof. We want to flatten out the unstable manifold in order to make (z+ , α+ ) = 0
invariant. We need to show that we can achieve this through transformations only on the
70
ẑ+ term. It follows from (8.4) that the unstable manifold can be written as
0
α+ g1 (A+ , ε+ )
u
W = (A+ , ẑ+ , ε+ , α+ ) : =
=
ẑ+
g2 (A+ , ε+ )
g2 (A+ , ε+ )
because α+ = 0 is invariant which requires Wu ⊂ {α+ = 0}. Here g2 (A+ , ε+ ) = O(|A+ |2 +
|ε+ |2 ). Using the coordinate transformation
z̃+ = ẑ+ − g2 (A+ , ε+ )
leads to
Wu = {(A+ , z̃+ , ε+ , α+ ) : (z̃+ , α+ ) = 0},
which is invariant, and in turn
∂τ z̃+ = ∂τ ẑ+ − ∂A+ g2 (A+ , ε+ )∂τ A+ − ∂ε+ g2 (A+ , ε+ )∂τ ε+
= −z̃+ (1 + O(|A+ | + |ε+ | + |α+ | + |z̃+ |)).
This last equality occurs because we made the unstable manifold invariant and no terms
of the form g(α+ ) appear from the transformation. The G from above is given by g2 .
We are left with system (8.5) after only performing transformations on the z+ term. Set
s (ε) is transverse to the
α1 = 0, we know that in the real subspace the stable manifold W∞
unstable manifold of p+ emerging from the equilibrium (A1 , z1 ) = (0, 21 + O(ε)) by lemma
8.2. In our flattened coordinates, the unstable direction near the equilibrium p+ becomes
s (ε) is a curve transverse to
the A+ direction. This then means the stable manifold W∞
the A+ direction but near the equilibrium. By remark 8.3, a whole one parameter family
s (ε) can be found by multiplying with eiγ . This proves the following
of curves lying in W∞
lemma.
0
Lemma 8.6. Fix ε > 0, ε01 > 0 and define the incoming section Σ+
1 around p+ as ε+ = ε1 .
s (ε) ∩ Σ+ as a
We can parameterize the stable manifold intersected with this section W∞
1
71
0 and γ by A (0) = −eiγ η(ε0 ) + O(|z̃ 0 | + |ε|) and z̃ (0) = −z̃ 0 with 0 < η
function of z̃+
+
+
+
+
1
0.
and 0 ≤ z̃+
Note the expansion
3
3
η(ε01 ) = c01 (ε01 ) 2 + o((ε01 ) 2 )
(8.6)
for some constant c01 > 0: see corollary 3.1 in the appendix for a proof.
We want to find τ+ > 0 such that initial data in Σ+
1 , the incoming section around p+ ,
lands in the outgoing section Σ+
2 around p+ given by z̃+ (−τ+ ) = −δ+ . The value of τ+
0 . This is found by solving equation (8.5). When we solve, we only want
will depend on z̃+
to integrate in the decaying direction for the A+ and z̃+ components. This is easy to do
because we are solving a boundary value problem and know what each component should
be in the relevant sections.
Lemma 8.7. Consider equation (8.5) where we have flattened the unstable manifold of
3
1
p+ . There exists ε0 > 0 and x0 > 0 such that for all 0 < ε < ε0 , ε 4 < x < x0 ε− 8 , and
initial data of the form
0
A+ (0) = −eiγ η + O(|z̃+
| + |ε|)
1
z̃+ (0) = −xε 4
ε+ (0) = ε01
α+ (0) =
ε
,
ε01
which lies in the stable manifold of (A2 , z2 ) = (0, − 21 + O(ε)), we can solve backward up to
1
4
0
the unique time τ+ (ε, x, η, δ+ ) = − ln( xε
δ+ ) + O δ+ + η + ε1 + α0 for which z̃+ (−τ+ ) =
72
−δ+ . This solution is
i 3 3 1 + O δ + η + ε0 + α +
0
1
A+ (−τ+ ) = −e η + O(ε ) x 2 ε 8
3
δ+2
h
z̃+ (−τ+ ) = −δ+
ε+ (−τ+ ) =
1
4
iγ
1
4
xε
ε01
δ+
1 + O δ+ + η + ε01 + α0
3
α+ (−τ+ ) =
ε 4 δ+
1 + O δ+ + η + ε01 + α0 .
0
xε1
Additionally note that τ+ depends on the value of z̃+ (0).
Proof. Solutions of the fixed point equation
Rτ 3
0
A+ (τ ) = −eiγ η + O(|z̃+
| + |ε|) e 0 [ 2 +O(A+ +ε+ +α+ +z̃+ )]dσ
−
z̃+ (τ ) = −δe
(8.7)
Rτ
−τ+ [1+O(A+ +ε+ +α+ +z̃+ )]dσ
for functions A+ (τ ) and z̃+ (τ ) are equivalent to solutions of equation (8.5).
To prove the theorem, we need to show solutions exist for a range of τ , and then we
need to show we can find a τ+ which gives solutions with our desired initial data. We are
solving a boundary value problem where our boundary terms lie in the sections ε+ = ε01
and z̃+ = −δ+ . We want to solve from the intersection of the first section, ε+ = ε01 , with
the stable manifold of (A2 , z2 ) = (0, − 21 + O(ε)) backwards in time into the second section,
z̃+ = −δ+ . Two of the components are explicitly solvable, ε+ and α+ , as functions of τ :
ε+ (τ ) = εo1 eτ ,
α+ (τ ) =
This shows |α+ (τ )| ≤
1
r0
α+ ε+ = ε
ε −τ
1
e ≤ .
0
r0
ε1
for τ ≥ −T with −T defined as the time where we match to
the core manifold. Define −τ+ as the value of τ when we land in the second section, then
0
−τ+ ≥ ln εr
.
ε0
1
73
Define the spaces
XA = {A+ : A+ (τ ) ∈ C defined and continuous for − τ+ ≤ τ ≤ 0}
Xz = {z̃+ : z̃+ (τ ) ∈ C defined and continuous for − τ+ ≤ τ ≤ 0} ,
equipped with the weighted norms
kϕk+
A =
sup
−τ+ ≤τ ≤0
kϕk+
z =
−τ+ ≤τ ≤0
sup
3
e− 2 τ |ϕ(τ )|
e−(τ+ −τ ) |ϕ(τ )|.
We want to show that the right hand side of the fixed point equation (8.7) is a contraction
mapping in these norms. The uniform contraction mapping theorem then gives a smooth
solution to these equations. We can streamline the following calculations by noting a few
important, but straightforward, properties of these norms. First, we can find pointwise
estimates by
3
τ
+
|φ(τ )| ≤ e 2 τ kφk+
A and |φ(τ )| ≤ e kφkz .
Second there is a constant C such that we can estimate the integrals
sup
Z
τ
−τ+ ≤τ ≤0 0
|φ(σ)|dσ ≤
Ckφk+
A
and
sup
Z
τ
−τ+ ≤τ ≤0 −τ+
|φ(σ)|dσ ≤ Ckφk+
z
uniformly in τ+ and φ.
We start by defining a map F : XA ⊕ Xz 7→ XA ⊕ Xz via the right hand side of equation
(8.7) so that
Rτ 3
0
[FA (A+ , z̃+ )] (τ ) = −eiγ η + O(|z̃+
| + |ε|) e 0 [ 2 +O(A+ +ε+ +α+ +z̃+ )]dσ
[Fz (A+ , z̃+ )] (τ ) = −δ+ e
−
Rτ
−τ+ [1+O(A+ +ε+ +α+ +z̃+ )]dσ
74
Looking at this map in our norms and using the properties above gives
kFA (A+ , z̃+ )k+
A =
sup
−τ+ ≤τ ≤0
Rτ 3
3 0
e− 2 τ − eiγ η + O(|z̃+
| + |ε|) e 0 [ 2 +O(A+ +ε+ +α+ +z̃+ )]dσ ε τ+
+
+
iγ
0
0
≤ − e η + O(|z̃+ | + |ε|) 1 + O kA+ kA + ε1 + 0 e + kz̃+ kz ε1
and
R
− τ [1+O(A+ +ε+ +α+ +z̃+ )]dσ e−(−τ+ −τ ) − δ+ e −τ+
−τ+ ≤τ ≤0
ε τ+
+
+
0
≤ − δ+ 1 + O kA+ kA + ε1 + 0 e + kz̃+ kz .
ε1
kFz (A+ , z̃+ )k+
z =
sup
From the formal analysis, we expect τ+ = O | 14 ln ε| . Additionally, we can choose η(ε01 )
arbitrarily small by varying ε01 : see equation (8.6). For a fixed value of ε, we could find a
very large displacement in the z+ direction from this choice of η. Luckily, we also expect
1
the displacement in the z+ direction to vary with ε 4 so by choosing a small enough value
s (ε) that
for the parameter ε, we can again find some segment of the stable manifold W∞
lies in the valid range for our coordinates. The right hand sides can be made small through
an appropriate choice of ε and η. There are two important points to notice. Our solution
operator is a well defined continuous operator, and it is Lipschitz with constant less than
1
2.
To see this, we take the derivatives of FA and Fz :
kDA FA (A+ , z̃+ )(Ã)kA
+
Z
R τ [ 3 +O(Ã+ε+ +α+ +z̃+ )]dσ τ
√
iγ
0
≤ −e η + O(|z̃+ | + |ε|) e 0 2
ÃO( α0 )dσ 0
A
ε
0
0
τ+
kÃk+
≤ C − eiγ η + O(|z̃+
| + |ε|) 1 + O kA+ k+
+ kz̃+ k+
z
A + ε1 + 0 e
A
ε1
75
and
+
Z τ
Rτ
√
− −τ
[1+O(A+ +ε+ +α+ +z̃)]dσ
+
kDz Fz (A+ , z̃+ )(z̃)kz ≤ δ+ e
z̃O( α0 )dσ −τ+
z
ε
τ+
0
kz̃k+
+ kz̃+ k+
≤ C − δ+ 1 + O kA+ k+
z
z,
A + ε1 + 0 e
ε1
+
where the terms multiplying kÃk+
A and kz̃kz give the size of the derivative and can be made
small by the previous calculation. We can conclude that for each large enough choice of
τ+ 1 we have a unique solution to the boundary value problem (8.7).
0 , η, δ) that gives our desired initial data must still be found. For
The value of τ+ (ε, z̃+
1
0 = −xε 4 where x is
this, we need to know the solution. The formal analysis implies z̃+
some positive quantity bounded away from zero. In backwards time, A+ should decay and
z̃+ should grow. We estimate the solution as
0
A+ (τ ) = −eiγ η + O(|z̃+
| + |ε|) e
−
z̃+ (τ ) = −δ+ e
Rτ
−τ+
Rτ
»
0
»
„
1+O δ+ eσ +εo1 eσ +
3
+O
2
„
δ+ eσ +εo1 eσ +
1
ε −σ
e +δ+ e 2 (−τ+ −σ)
ε0
1
1
ε −σ
e +δ+ e 2 (−τ+ −σ)
ε0
1
«–
dσ
«–
dσ
.
1
Noting that ε 4 is the leading order term over ε, we can integrate this into
h
i 3
1
A+ (τ ) = −eiγ η + O(ε 4 ) e 2 τ eh1 (τ )
z̃+ (τ ) = −δ+ e−τ+ e−τ eh2 (τ )
(τ )
with |h1 (τ )| = O(δ+ + η + ε01 + α0 ), |h2 (τ )| = O(δ+ + η + ε01 + α0 ), and | dhdτ2 +
| = O(δ+ +
η + ε01 + α0 ). Furthermore
z̃+ (0) = −δ+ e−τ+ eh2 (0)
which enables us to calculate τ+ . Equating our expected initial z+ from the formal analysis
76
to this expression we find
1
0
z̃+
= xε 4 = δ+ e−τ+ eh2 (0)
1
e
τ+
xε 4
=
=⇒
δ+ eh2 (0)
1
−τ+ = ln(
1
xε 4
xε 4
) − h2 (0) = ln(
) + O δ+ + η + ε01 + α0 .
δ+
δ+
We now have a value for τ+ which both enables us to solve equation (8.5) and gives the
right initial data. Now it remains to write down the value of the equation in the outgoing
section Σ+
2 so we can continue this calculation in a different chart. In the end, our solution
in Σ+
2 is
h
i
A+ (τ+ ) = −eiγ η + O(ε )
1
4
h
1
xε 4
δ+
!3
2
3
eh1 (τ+ )− 2 h2 (0)
i 3 3 eh1 (τ+ )− 32 h2 (0)
= −e η + O(ε ) x 2 ε 8
3
δ+2
1
4
iγ
z̃+ (τ+ ) = −δ+
1
ε+ (τ+ ) = εo1 eτ+ = εo1
xε 4
δ+ eh2 (0)
3
ε
ε 4 δ+ eh2 (0)
α+ (τ+ ) = 0 e−τ+ = 0
,
x
ε1
ε1
which completes the proof.
We can invert the z̃+ coordinate to find
h
i 3 3 1 + O(δ + η + ε0 + α )
1
+
0
1
iγ
A+ (τ+ ) = −e η + O(ε 4 ) x 2 ε 8
3
δ+2
1
z+ (τ+ ) = −δ+ + O(ε 2 )
1
ε+ (τ+ ) = ε01
xε 4
1 + O(δ+ + η + ε01 + α0 )
δ+
3
α+ (τ+ ) =
ε 4 δ+
1 + O(δ+ + η + ε01 + α0 ) .
0
ε1 x
77
We are now concerned with transporting the solutions into the valid range for the normal
form around the other fixed point.
Summary:
We have introduced many new constants, and would like to recall their
3
1
expected values here: 0 < ε < ε0 , ε 4 < x < x0 ε− 8 , |h1 (τ )| = O(δ+ + η + ε01 + α0 ), |h2 (τ )| =
3
3
(τ )
O(δ+ + η + ε01 + α0 ), and | dhdτ2 +
| = O(δ+ + η + ε01 + α0 ). Note η(ε01 ) = c01 (ε01 ) 2 + o((ε01 ) 2 ).
4.8.3
Connecting P+ to P−
We establish a diffeomorphism Π(A1 , z1 , α1 , ε1 ) to understand how the solutions vary be−
tween Σ+
2 given by z̃+ = −δ+ and the third section Σ1 which is approximately given by
z1 ≈ − 21 + δ− . The constants δ+ and δ− must be chosen small enough that they are within
the range of the normal form coordinates around p+ and p− , respectively. Rather than
define our third section as the flat plane z1 = − 12 + δ− for some choice of δ− , we define it as
δ−
the section that arises by integrating backwards for a fixed time τ0 = − ln (1−δδ++)(1−δ
−)
from the incoming section. We need to choose δ− small enough such that the solutions we
are interested in (those for small enough ε) land in the valid range of the normal form calculations around (0, − 12 ). The diffeomorphism comes from the flow in our original transition
chart coordinates:
∂τ A1 = A1 1 + z1 + O |α1 |2
∂τ z1 = −z12 +
∂τ ε1 = ε1
1 ε21
+
+ c03 |A1 |2 + O |α1 |2
4
4
∂τ α1 = −α1 .
We are avoiding any fixed points of the flow, so the function defined by flowing initial
data in the section z̃+ = −δ+ for time τ0 is well-defined, smooth and invertible: it is a
diffeomorphism. When A1 = α1 = ε1 = 0, the z1 axis is invariant. We expand around
78
P+
A1
z1
!
(0, 0)
"
1
,0
2
−η
s
W∞
s
W∞
s
Figure 4.6: In this cartoon, we display the expected motion of W∞
from the positive equilibrium backwards
in time towards the negative equilibrium.
this axis to control the solution growth in the other directions as we move between the
sections. The equation on the z1 axis reduces to
1
∂τ z1 = −z12 + ,
4
and this is easily solved as
z1 (τ ) =
eτ − ec
.
2 (eτ + ec )
Next we want the time scale to traverse from z1 =
z1 (0) =
1
2
1
2
− δ+ to z1 = − 12 + δ− . Assuming
− δ+ we can find the constant in the above equation. We find after some algebra
c = ln
δ+
1 − δ+
,
and that the time to the next section is given by
τ0 = − ln
δ+ δ−
(1 − δ+ )(1 − δ− )
.
79
This motivates our integration time above. The constants δ± do not depend on ε. We can
write down the following expansion for our diffeomorphism around the invariant axis:
ag1 (a, z, ε, α)
1
−
+
δ
+
zg
(a,
z,
ε,
α)
−
2
1
2
Π(a, − δ+ + z, ε, α) =
2
εg
(a,
z,
ε,
α)
3
αg4 (a, z, ε, α)
a(c1 + O(|a| + |z| + |ε| + |α|))
− 1 + δ− + z(c2 + O(|a| + |z| + |ε| + |α|))
2
=
.
ε(c
+
O(|a|
+
|z|
+
|ε|
+
|α|))
3
α(c4 + O(|a| + |z| + |ε| + |α|))
3
From corollary 3.2 in the appendix, c1 = δ+2
p
δ− (1 + O(δ+ + δ− ))). In the end, we inte-
grate for a finite time to move between the normal forms. This does not change the order
in ε of any of our solutions, and for small offsets just appears as a scalar change in the
distance to the invariant z1 axis.
Summary:
For small enough ε, the diffeomorphism above will not send any nonzero
component to zero or change the sign. It also does not alter the order in ε of any of the
components. The constants c1,2,3,4 > 0 are positive.
80
P−
z1
P+
A1
!
"
1
− ,0
2
!
(0, 0)
s
W∞
s
W∞
"
1
,0
2
s
W∞
s
Figure 4.7: Here the full motion of W∞
between P− (on the left) and P+ (on the right) is shown with
the expected linear growth rates around and between the equilibria. Sections 4.8.2, 4.8.3 and 4.8.4 are
equivalent to stepping across this picture from right to left.
4.8.4
P− :
We are left with initial data in our final coordinate chart: we need to propagate this into
the section α1 =
1
r0
and match it to the core manifold. Our goal is to solve
1
2
+ z− + O |α− |
∂τ A− = A−
2
ε2
2
∂ τ z − = z− − z−
+ − + c03 |A− |2 + |α− |2 O (|A− | + |z− | + |ε− |)
4
(8.8)
∂ τ ε− = ε−
∂τ α− = −α−
backwards in time until the matching point r = r0 . The initial data for A− and z− is given
by
3
p
1
2
A− (0) = −e η δ+ δ− (1 + O(δ+ + δ− )) + O(|ε| 4 )
iγ
h
i x 32 ε 38
1
× 1 + O(δ+ + η + ε01 + α0 + |ε| 4 )
3
δ+2
(8.9)
81
and
1
z− (0) = δ− + O(|ε| 2 )
(8.10)
with the constants given in the previous section. Recall this was for a sufficiently small
3
1
0 < ε, 0 < ε01 , ε 4 < x < x0 ε− 8 and 0 < δ± as needed in the proof of Lemma 8.7. We
know the time from the initial data in the first chart to the matching time, and the amount
of time we have solved between the first three sections to arrive at our present equation.
From this information we can easily find how long we should integrate in backwards time:
τ− = T − τ+ − τ0
= − ln
εr0
+ ln
ε01
1
4
xε
δ+
!
(8.11)
+ ln
δ+ δ−
(1 − δ+ )(1 − δ− )
+ O δ+ + η + ε01 + α0
3
α0 ε01 xδ−
= − ln ε + ln
+ O δ+ + η + ε01 + α0 .
4
(1 − δ+ )(1 − δ− )
This gives us the initial data in the α− and ε− components:
1
ε− (0) = ε 4 xε01
3
1
δ−
0
eO(δ+ +η+ε1 +α0 ) =: cε ε 4
(1 − δ+ )(1 − δ− )
(8.12)
3
ε 4 (1 − δ+ )(1 − δ− ) O(δ+ +η+ε01 +α0 )
e
=: cα ε 4 .
α− (0) = 0
δ−
xε1
Equation (8.8), unfortunately, is not easily solved for this amount of time. We again
circumvent this problem by using normal form coordinates.
Lemma 8.8. Using the C ∞ transformation
Ã− = A− (1 + O(A− + z− + ε− + α− ))
α2 α3
2
z̃− = z− + O(Aα−1 z−
ε − ) + O α−
(A− + z− + ε− )
(8.13)
82
with
P
i=1,..,4 αi
≥ 2, equation (8.8) can be recast as
1
2
∂τ Ã− = Ã−
+ O |α− | (z̃− + ε− + Ã− )
2
2
∂τ z̃− = z̃− + c03 |Ã− |2 + O |α− |2 (Ã2− ε− z̃− + z̃−
+ Ã4− + ε2− )
(8.14)
∂ τ ε− = ε−
∂τ α− = −α− .
Proof. By the Poincare-Dulac theorem (see [2, pgs. 181-184]), we can find a formal
transformation to remove non-resonant terms up to arbitrary order. The result in [9,
Theorem of Equivalence] states that a C ∞ transformation exists which carries one C ∞
vector field onto another if there is a formal transformation between their corresponding
Taylor expansions. For this equation, resonant terms in the A− component are of the
m εl αn+m+l for any non-negative n, m and l, while resonant terms of the z
form A2n+1
z−
−
− −
−
n A2m εl αn+m+l−1 with n + m + l ≥ 1. Also notice that for a
component are of the form z−
− − −
m εn αp then ∂ f (A , z , ε , α ) = O Al z m εn αp +
term f (A− , z− , ε− , α− ) = O Al− z−
τ
− − −
−
− −
− − − −
m−1 n p
2
O Al− z−
ε− α− ε2− + A2− + α−
. Equation (8.14) does not contain several leading order
resonant terms. These are resonant terms where α− appears as a linear multiplier. These
will not appear from the transformations used to remove the non-resonant terms. The
leading order non-resonant terms we want to transform away do not depend on α− . Also,
2 as the leading order. Taking the
in the derivatives of A− , z− and ε− , we only see α−
derivative of these polynomial terms additionally cannot lower the order in α− as was
mentioned above. The addition of any term linear in α− would need to be immediately
cancelled by the same term because all other components only change α− at quadratic
order. All higher order resonant terms are captured by equation (8.14). For these leading
order terms, explicit transformations can be written down to verify this, but they are not
sufficient for the claims on the remainders.
Now we need to discuss the remainders in equation (8.8) and their effect on the form of
the transformation (8.13). The remainders in equation (8.8) are |α− |2 O (|A− | + |z− | + |ε− |).
83
As a result, the set (A− , z− , ε− ) = (0, 0, 0) is invariant.
The existence of a C ∞ transformation between our two equations is now guaranteed,
but we must still show that it is of the form shown in equation (8.13). Specifically, we
want to show that if A− = 0 is invariant, and Ã− = 0 is invariant, then our transformation also leaves A− = 0 invariant. The transformation between these two vector
fields is given by [9, Lemma 3.1] wherein a sequence, σi , of transformations is defined
which limit to the appropriate coordinate transformation. Denoting our initial and final vector fields as T and T̃ respectively, the sequence is defined in various parts of
the space with one of the following transformations: σ1 p = p, T̃ T −1 p, or T̃ −1 T p and
σk p = σk−1 p, T̃ σk−1 T −1 p, or T̃ −1 σk−1 T p. First consider σ1 . When it is the identity,
it certainly respects the invariance property above. In the other two cases, it is a combination of functions which leave the appropriate set invariant (as the inverse of these
vector fields does). This means σ1 has the desired property. The argument for each σk
is the same inductively, only now with combinations of three functions that respect the
invariance. Then, as each element in the sequence has the desired property, so does their
limit and that establishes the desired property. A similar argument can be used about the
invariant set (A− , z− , ε− ) = (0, 0, 0) to prove the previous claim, completing the proof.
We now transform the initial data into our new coordinates:
p
1
Ã− (0) = −e η δ+ δ− (1 + O(δ+ + δ− )) + O(|ε| 4 )
iγ
3
2
h
i x 32 ε 83
1
× 1 + O(δ+ + δ− + η + ε01 + α0 + |ε| 4 )
3
δ+2
1
2
z̃− (0) = δ− + O(δ−
+ ε 4 ).
In the chart P+ we had to solve a boundary value problem in order to land in the
second section. To do this, we used a variation of constants formula and showed it was
a contraction in an appropriate space. Here we are no longer solving a boundary value
84
problem, but the rest of the computation is very similar. We only integrate in one direction
in time for both components here, and we know how long to integrate before we begin.
α ε01 xδ−
Lemma 8.9. Let τ− = − 43 ln ε + ln (1−δ0+ )(1−δ
+ O δ+ + η + ε01 + α0 as in equation
−)
f
0 | ≤ z̃ f and
(8.11). There exists a Ãf− > 0, z̃−
> 0 and ε0 > 0 such that for |Ã0− | ≤ Ãf− , |z̃−
−
0 , ε0 , α0 )
ε ≤ ε0 we can solve equation (8.14) with initial data (Ã− , z̃− , ε− , α− ) = (Ã0− , z̃−
−
−
backwards in time up to time τ for each −τ− ≤ τ ≤ 0. In the section α1 =
1
r0
the solution
is
3√
3√
7√
3
0
Ã− (−τ− ) =ε 4 F −1 Â01 + O ε 2 F Â0− ẑ−
+ ε 4 F Â0− + ε 2 (Â0− )2 F
"
#
13
3
3
3
−1
0
−1
0
0
2
0
2
0
z̃− (−τ− ) =ε 4 F ẑ1 + ln(cτ ε)F
c3 ε 2 |Â− | + O ε 4 (Â− ) ẑ−
4
3
0 2
) + ε3 (Â0− )4 + ε2 ,
+ O ε 2 (ẑ−
where
F = F(δ− , δ+ , ε01 , x, r0 ) :=
0
α0 ε01 xδ−
eO(δ+ +η+ε1 +α0 ) .
(1 − δ+ )(1 − δ− )
Proof. This can again be proved by finding a contraction for the variation of constants
operator in an appropriate weighted space. The ε dependence of each term in the equation
is important when we try to solve. We handle this dependence by factoring ε out before
3
we solve. Using the coordinates Ã− = ε 8 Â− and z̃− = ẑ− , equation (8.14) is rewritten as
3
1
∂τ Â− = Â− + O |α− |2 Â− (ẑ− + ε− + ε 8 Â− )
2
3
3
3
2
2
∂τ ẑ− =ẑ− + c03 ε 4 |Â− |2 + O ε 4 Â2− α−
ε− ẑ− + |α− |2 (ẑ−
+ ε 2 Â4− + ε2− )
∂τ ε− =ε−
∂τ α− = − α− .
We track the solutions from the previous section into the final section at α1 =
1
r0 .
First
85
we explicitly solve the equations for α− and ε− as
1
ε− (τ ) = cε ε 4 eτ
3
α− (τ ) = cα ε 4 e−τ ≤
1
r0
with cα and cε defined as in equation (8.12).
The expected decay rates are different around this equilibrium than in P+ ; the norms
must reflect this. We use the same spaces as before, XA and Xz , equipped with the new
norms
kϕk−
A :=
kϕk−
z :=
1
sup e− 2 σ |ϕ(σ)|
τ− ≤σ≤0
sup e−σ |ϕ(σ)|
τ− ≤σ≤0
to solve the equations. We want to write down several estimates to speed our calculations.
First, we have pointwise estimates
1
τ
−
|φ(τ )| ≤ e 2 τ kφk−
A and |φ(τ )| ≤ e kφkz
and there is a constant C, independent of τ− , such that we have the integral estimates
Z
sup
τ
τ− ≤τ ≤0 0
|φ(σ)|dσ ≤ Ckφk−
A and
sup
Z
τ− ≤τ ≤0 0
τ
|φ(σ)|dσ ≤ Ckφk−
z.
Our approach here is the same as was done around P+ . Restarting from a variation of
constants formula, we want the solution to
Z
1
3
e 2 (τ −σ) O |α− |2 Â− (ẑ− + ε− + ε 8 Â− ) dσ
0
"
#
Z τ
3
3
3
2
2
+ ε 2 Â4− + ε2− ) + ε 4 Â2− α−
ε− ẑ− dσ.
ẑ− (τ ) =eτ ẑ10 +
eτ −σ c03 ε 4 |Â− |2 + O |α− |2 (ẑ−
Â− (τ ) =e
1
τ
2
Â01
+
τ
0
Taking these expressions one at a time, we look at their right hand sides in the norms
86
defined above. Starting with the Â− component and recalling the estimate τ ≤
3
4
ln cτ ε
kÂ− kA
=
≤
≤
≤
≤
Z
t 1
3
sup e |e Â0− | + sup e e 2 (t−σ) O |α− |2 Â− (ẑ− + ε− + ε 8 Â− ) dσ 0
τ ≤t≤0
τ ≤t≤0
Z
t 1 1
3 1
e− 2 σ O |α− |2 kÂ− kA e 2 σ (eσ kẑ− kz + ε− + ε 8 e 2 σ kÂ− kA ) dσ |Â0− | + sup τ ≤t≤0
0
Z t O c2α ε 23 e−2σ kÂ− kA (eσ kẑ− kz + cε ε 14 eσ + ε 38 e 12 σ kÂ− kA ) dσ |Â0− | + sup τ ≤t≤0 0
3
7
15
3
|Â0− | + O c2α ε 2 e−τ kÂ− kA kẑ− kz + c2α cε ε 4 e−τ kÂ− kA + c2α ε 8 e− 2 τ kÂ− k2A
3
3
|Â0− | + O c2α ε 4 kÂ− kA kẑ− kz + c2α cε εkÂ− kA + c2α ε 4 kÂ− k2A .
− 12 t
1
t
2
− 21 t
Now the ẑ− component
kẑ− kz
=
≤
≤
≤
≤
0
sup e−t |et ẑ−
|
τ ≤t≤0
Z
t
3
3
3
2
2
et−σ c03 ε 4 |Â− |2 + O |α− |2 (ẑ−
+ sup e−t ε− ẑ− dσ + ε 2 Â4− + ε2− ) + ε 4 Â2− α−
0
τ ≤t≤0
Z
t
3
0
|ẑ−
| + sup e−σ c03 ε 4 eσ kÂ− k2A
τ ≤t≤0 0
3
3
+O |α− |2 (e2σ kẑ− k2z + ε 2 e2σ kÂ− k4A + ε2− + ε 4 ε− e2σ kÂ− k2A kẑ− kz ) dσ Z t 3
0
c03 ε 4 kÂ− k2A
|ẑ−
| + sup τ ≤t≤0
0
3
1
2 23 −σ
2
−σ
4
2
−σ
2
+O cα ε (e kẑ− kz + ε 2 e kÂ− kA + cε ε 2 e + cε εkÂ− kA kẑ− kz dσ 3
0
|ẑ−
| + c03 ε 4 kÂ− k2A |τ |
3
5
2 23 −τ
2
−τ
4
2 21 −τ
2
2
2
2
+O cα ε (e kẑ− kz + ε e kÂ− kA + cε ε e ) + |τ |cα cε ε kÂ− kA kẑ− kz 3
3
3
0
|ẑ− | + c03 ε 4 kÂ− k2A | ln ε + ln cτ |
4
4
3
9
5
2
2
4
2 45
2
2
4
4
2
+O cα (ε kẑ− kz + ε kÂ− kA + cε ε ) + | ln ε|cα cε ε kÂ− kA kẑ− kz 87
We also need to look at the derivatives of the right hand side, but this comes from the same
calculation and can similarly be made small. From this calculation, we see a contraction
for sufficiently small ε. We can solve these equations.
1
We also want good estimates for the solution and we find these by using Â− (τ ) = Â0− e 2 τ ,
1
3
0 eτ , ε = c ε 4 eσ and α = c ε 4 e−σ :
ẑ− (τ ) = ẑ−
−
ε
−
α
Â− (τ ) = e
1
τ
2
Â01
+
Z
τ
e
1
(τ −σ)
2
0
"
3
8
O |α− | Â− (ẑ− + ε− + ε Â− )
2
#
dσ
3
1
7
1
15
0 − 12 τ
= e 2 τ Â01 + O ε 2 Â0− ẑ−
e
+ ε 4 Â0− e− 2 τ + ε 8 (Â0− )2 e−τ
#
"
Z τ
3
3
3
2
2
ε− ẑ− dσ
+ ε 2 Â4− + ε2− ) + ε 4 Â2− α−
ẑ− (τ ) = eτ ẑ10 +
eτ −σ c03 ε 4 |Â− |2 + O |α− |2 (ẑ−
0
=
eτ ẑ10
+ τe
τ
"
3
c03 ε 4 |Â0− |2
+O ε
5
2
0
(Â0− )2 ẑ−
#
3
0 2
+ O ε 2 (ẑ−
) + ε3 (Â0− )4 + ε2 .
Transforming back into (Ã− , z̃− ) gives
15
3 1
17
9
1
0 − 21 τ
Ã− (τ ) = ε 8 e 2 τ Â01 + O ε 8 Â0− ẑ−
e
+ ε 8 Â0− e− 2 τ + ε 4 (Â0− )2 e−τ
"
#
5
3
τ 0
τ
0 34
0 2
0
2
0
0 2
z̃− (τ ) = e ẑ1 + τ e c3 ε |Â− | + O ε 2 (Â− ) ẑ−
+ O ε 2 (ẑ−
) + ε3 (Â0− )4 + ε2 .
Then at the endpoint, using
3
α0 ε01 xδ−
τ− = − ln ε + ln
+ O δ+ + η + ε01 + α0 ,
4
(1 − δ+ )(1 − δ− )
and
3
eτ− = ε− 4
3
0
α0 ε01 xδ−
eO(δ+ +η+ε1 +α0 ) =: ε− 4 F(δ− , δ+ , ε01 , x, α0 ),
(1 − δ+ )(1 − δ− )
88
we find
15
3
17
1
9
1
0 21 τ−
Ã− (−τ− ) = ε 8 e− 2 τ− Â01 + O ε 8 Â0− ẑ−
e
+ ε 8 Â0− e 2 τ− + ε 4 (Â0− )2 eτ−
3√
3√
7√
3
0
= ε 4 F −1 Â01 + O ε 2 F Â0− ẑ−
+ ε 4 F Â0− + ε 2 (Â0− )2 F
"
#
3
5
3
0
0 2
z̃− (−τ− ) =e−τ− ẑ10 − τ− e−τ− c03 ε 4 |Â0− |2 + O ε 2 (Â0− )2 ẑ−
+ O ε 2 (ẑ−
) + ε3 (Â0− )4 + ε2
#
"
13
3
3
0
=ε F −1 ẑ10 + ln(cτ ε)F −1 c03 ε 2 |Â0− |2 + O ε 4 (Â0− )2 ẑ−
4
3
0 2
+ O ε 2 (ẑ−
) + ε3 (Â0− )4 + ε2 .
3
4
Our initial data is then transformed into
3
p
1
2
4
= −e η δ+ δ− (1 + O(δ+ + δ− ))) + O(|ε| )
Â01
iγ
h
× 1 + O(δ+ + δ− + η +
1
ε01
i x 32
+ α0 + |ε| ) 3
δ+2
1
4
2
ẑ10 = δ− + O(δ−
+ |ε| 4 ),
and our final data is given by
3
p
1
2
A1 (−τ− ) = −ε e η δ+ δ− (1 + O(δ+ + δ− ))) + O(|ε| 4 )
(8.15)
h
i
1
x
× 1 + O(δ+ + δ− + η + ε01 + α0 + |ε| 4 ) 3 p
δ+2 α0 ε01 δ−
3
1
1
1
2
z1 (−τ− ) = − + ε 4
δ− + O(δ−
+ |ε| 4 ) 1 + O δ+ + δ− + η + ε01 + α0
0
2
α0 xε1 δ−
2
h
i x 32 3 1
3
+ ln(cτ ε)C1−1 r0 x2 c03 ε 2 −c1 eiγ η + ηO(δ+ + η + ε01 + α0 + |ε| 4 ) 3
4
δ+2 3
4
iγ
89
with
C1 =
=
F
α0 x
0
ε01 δ−
eO(δ+ +η+ε1 +α0 )
(1 − δ+ )(1 − δ− )
= ε01 δ− 1 + O δ+ + δ− + η + ε01 + α0
Summary:
Note that C1 > 0. A plethora of constants have been introduced throughout
the chapter, and relevant information about them has been collected in the summaries at
the end of each section. Most of these have been defined to be positive, and greater than
zero for sufficiently small ε. Everything is now in place to find the intersections between
the core and far-field.
4.9
Proof of the main theorem: matching the core
To complete the proof of theorem 3, we must solve for intersections between the core
manifold and equation (8.15) in terms of the variables (d˜1 , d˜2 ), x and γ as functions of ε.
s (ε) can be parameterized by η, γ and x as
By applying the lemmas from section 4.8, W∞
3
1
in equation (8.15). Recall that x0 > 0 and ε 4 < x < x0 ε− 8 . The core manifold, in the
appropriate matching coordinates, is given by (5.6)
2
2
2
A1 = ei[−π/4+O(α0 )+Oα0 (|ε| +|d| )]
1
−2
−3/2 ˜
2 ˜
2
˜
˜
× α0 d1 [1 + O(α0 )] − α0 d2 [i + O(α0 )] + Oα0 (|ε| |d| + |d| )
√
√
˜ + |d˜2 |2 + |d˜1 |3 )
1 −d˜2 [i + O(α0 )] − [1/ 3 + O( α0 )]ν d˜21 + Oα0 (|ε|2 |d|
z1 = − +
.
˜ + |d|
˜ 2)
2
α0 d˜1 [1 + O(α0 )] − d˜2 [i + O(α0 )] + Oα (|ε|2 |d|
0
90
The system of equations we must solve is
h
i x
3
1
−ε 4 eiγ η 1 + O(δ+ + δ− + η + ε01 + α0 + |ε| 4 ) p 0
ε1
2
2
(9.1)
2
= ei[−π/4+O(α0 )+Oα0 (|ε| +|d| )]
i
h
˜ + |d|
˜ 2)
× d˜1 [1 + O(α0 )] − α0−1 d˜2 [i + O(α0 )] + Oα0 (|ε|2 |d|
(9.2)
and
3
ε4
=
1
1 0
4
1
+
O
δ
+
δ
+
η
+
ε
+
α
+
|ε|
+
−
0
1
α0 xε01
√
√
˜ + |d˜2 |2 + |d˜1 |3 )
−d˜2 [i + O(α0 )] − [1/ 3 + O( α0 )]ν d˜2 + Oα (|ε|2 |d|
1
0
˜ + |d|
˜ 2)
α0 d˜1 [1 + O(α0 )] − d˜2 [i + O(α0 )] + Oα0 (|ε|2 |d|
(9.3)
.
˜ 2 ) we can remove the phase
First, by redefining γ̂ = γ − π/4 + O(r0−2 ) + Or0 (|ε|2 + |d|
in (9.1). We also want to rescale as (d˜1 , d˜2 ) = (ε 4 dˆ1 , ε 2 dˆ2 ). We obtain the system
3
3
and
0 =
3
ˆ + |ε| 34 |d|
ˆ 2)
0 = dˆ1 [1 + O(α0 )] − ε 4 α0−1 dˆ2 [i + O(α0 )] + Oα0 (|ε|2 |d|
h
i xη
1
0
4
+ (cos(γ̂) + i sin(γ̂)) 1 + O(δ+ + δ− + η + ε1 + α0 + |ε| ) p 0
ε1
1 + O δ+ + δ− + η +
ε01
+ α0 + |ε|
1
4
"
#
ˆ2
3
d
2
2
ˆ )
ˆ + |ε| 4 |d|
dˆ1 − iε
+ Oα0 (|ε| |d|
α0
3
4
√
√
+xε01 dˆ2 [i + O(α0 )] + [1/ 3 + O( α0 )]νxε01 dˆ21
5
ˆ + |ε| 23 |dˆ2 |2 + |ε| 34 |dˆ1 |3 ).
+xε01 Oα0 (|ε| 4 |d|
Our goal will be to apply the Implicit Function Theorem to solve this system. By equating
91
the real and imaginary parts of the two equations, we arrive at the following system:
3
ˆ + |ε| 43 |d|
ˆ 2)
0 = dˆ1 [1 + O(α0 )] + dˆ2 O(ε 4 ) + Oα0 (|ε|2 |d|
h
i xη
1
+ cos(γ̂) 1 + O(δ+ + δ− + η + ε01 + α0 + |ε| 4 ) p 0
ε1
3
3
ˆ + |ε| 4 |d|
ˆ 2)
0 = dˆ1 O(α0 ) − ε 4 α0−1 dˆ2 [1 + O(α0 )] + Oα0 (|ε|2 |d|
h
i xη
1
+ sin(γ̂) 1 + O(δ+ + δ− + η + ε01 + α0 + |ε| 4 ) p 0
ε1
1
0
0 = dˆ1 O δ+ + δ− + η + ε1 + α0 + |ε| 4
#
"
3 dˆ
3
1
2
ˆ + |ε| 4 |d|
ˆ 2)
− 1 + O δ+ + δ− + η + ε01 + α0 + |ε| 4
+ Oα0 (|ε|2 |d|
ε4
α0
5
ˆ + |ε| 32 |dˆ2 |2 + |ε| 34 |dˆ1 |3 )
+xε01 dˆ2 [1 + O(α0 )] + xε01 Oα0 (|ε| 4 |d|
h
i
1
3
0
2
2 ˆ
ˆ
ˆ
4
4
0 =
1 + O δ+ + δ− + η + ε1 + α0 + |ε|
d1 + Oα0 (|ε| |d| + |ε| |d| )
1
dˆ2 O δ+ + δ− + η + ε01 + α0 + |ε| 4
α0
√
√
0ˆ
+xε d2 O(α0 ) + [1/ 3 + O( α0 )]νxε0 dˆ2
3
+ε 4
1
1 1
ˆ + |ε| |dˆ2 |2 + |ε| |dˆ1 |3 ).
+xε01 Oα0 (|ε| |d|
5
4
3
2
3
4
For ε = 0 and fixed α0 , ε01 , η and δ± , this becomes
xη
0 = dˆ1 [1 + O(α0 )] + cos(γ̂) 1 + O(δ+ + δ− + η + ε01 + α0 ) p 0
ε1
xη
0 = dˆ1 O(α0 ) + sin(γ̂) 1 + O(δ+ + δ− + η + ε01 + α0 ) p 0
ε1
0 = dˆ1 O δ+ + δ− + η + ε0 + α0 + xε0 dˆ2 [1 + O(α0 )]
1
0 =
1
1 + O δ+ + δ− + η + ε01 + α0
3
3
√
√
dˆ1 + xε01 dˆ2 O(α0 ) + [1/ 3 + O( α0 )]νxε01 dˆ21 .
Recalling η(ε01 ) = c01 (ε01 ) 2 + o((ε01 ) 2 ), while simultaneously substituting in the new param-
92
eter y = xε01 , simplifies this significantly into
0 = dˆ1 [1 + O(α0 )] + cos(γ̂) 1 + O(δ+ + δ− + ε01 + α0 ) c01 y
0 = dˆ1 O(α0 ) + sin(γ̂) 1 + O(δ+ + δ− + ε01 + α0 ) c01 y
0 = dˆ1 O δ+ + δ− + ε01 + α0 + y dˆ2 [1 + O(α0 )]
√
√
0 = 1 + O δ+ + δ− + ε01 + α0 dˆ1 + y dˆ2 O(α0 ) + [1/ 3 + O( α0 )]νy dˆ21 .
(9.4)
Letting the constants α0 , δ+ , δ− , ε01 → 0 with c01 > 0 a constant, we obtain
0 = dˆ1 + cos(γ̂)c01 y
(9.5)
0 = sin(γ̂)c01 y
0 = y dˆ2
√
0 = dˆ1 + [1/ 3]νy dˆ21 .
A straightforward calculation shows this system is satisfied by
y =
s√
3
=: y0
νc01
(9.6)
γ̂ = 0
dˆ1
s √
c01 3
= −
ν
dˆ2 = 0.
Call this solution ~y0 . The matrix of partial derivatives for the first three components of
(9.5) is
fdˆ1 ,γ̂,dˆ2 (~y0 ) =
0
0
1
0 c0 y
0
0
1
0
0
y0
with determinant c01 y02 . There exists a K > 0 such that the solution persists for α0 , δ+ , δ− , ε01 <
93
K. We can repeat this procedure for the full equation to find a solution with estimates
s√
1
√
3
[1 + O(δ+ + δ− + ε01 + α0 + |ε| 4 )]
0
νc1
1
√
γ̂ = O(δ+ + δ− + ε01 + α0 + |ε| 4 )
s √
1
√
c01 3
dˆ1 = −
[1 + O(δ+ + δ− + ε01 + α0 + |ε| 4 )]
ν
1
√
ˆ
d2 = O(δ+ + δ− + ε01 + α0 + |ε| 4 ).
y =
(9.7)
Transforming back into the original variables d˜1 and d˜2 , we find
d˜1
d˜2
s √
1
√
c01 3
[1 + O(δ+ + δ− + ε01 + α0 + |µ| 8 )]
= −µ
ν
3
1
√
= µ 4 O(δ+ + δ− + ε01 + α0 + |µ| 8 )
3
8
(9.8)
completing the proof of theorem 3.
4.10
The breakdown of monotonicity
As a consequence of the above proof, we expect the envelope of a spot B solution to be
non-monotone. The transition chart captures the algebraic decay rate of the envelope
of the solution, so a positive value of z1 corresponds to growth and a negative value to
decay. Spot A decreases monotonically from the core out to infinity: in our coordinates,
the negative z1 component never changes sign. The ring, on the other hand, grows and
then decreases which corresponds to a positive z1 coordinate in the transition chart, but
it eventually connects to the exponentially decaying far field. Because spot B passes near
to the equilibrium z1 =
1
2
and the ring solution, there is a region where it should have
a positive algebraic growth rate. Outside of this region it is near spot A, and should be
decaying. By looking at the spot B profile as µ is reduced towards zero, we should be
able to see each of these regions. The amplitude of the oscillations should start large and
decrease, then there should be a short stretch where the amplitude grows, but this should
94
µ ∈ [0.04, 0.14]
|u(r̃)|
Decreasing µ
r̃
Figure 4.8: The radial rescaling is done with γ = 1/2 corresponding to r̃ = εr. The absolute values of
several solutions are plotted for various values of µ ∈ [0.04, 0.14]. Note the change in amplitude of the
extrema as µ is varied: the amplitude equation can be visualized through these values. For the largest
value of µ, the maximum amplitude is not at the origin. This is an example of the expected breakdown
of monotonicity, though we are far from the valid range of our calculations. As µ is decreased, the second
largest extremum shrinks while third largest extremum grows. When µ is made small enough, we expect a
shift in which is largest. This can be seen in figure 4.9.
|u(r̃)|
µ = 0.0059
r̃
Figure 4.9: This plot is similar to figure 4.8, only for a value of µ = 0.0059. As is highlighted by the
dashed line, there is now a non-monotonicity in the amplitude with respect to r.
cease and the amplitudes should decay towards zero.
To see this behavior, we first rescale the calculation with the variables r̃ = µγ r. The
95
equation becomes
d
u = u1
dr̃
d
u1 = u2
dr̃
d
u2 = u3
dr̃
d
n−1
u3 = µ−4γ −(1 + µ)u + νu2 − u3 − 2µ−2γ (
u1 + u2 )
dr̃
r̃
(n − 1)(n − 3) u1
2(n − 1)
+
( − u2 ) −
u3
r̃2
r̃
r̃
on the interval (0, L) together with the Neumann boundary conditions
u1 (0) = 0,
u3 (0) = 0,
u1 (L) = 0,
u3 (L) = 0
(10.1)
at r̃ = 0, L. We use the same methods as discussed in chapter 3 to solve it. Normally as the
bifurcation parameter is reduced towards zero the support of the solution starts to fill the
calculation interval and hits the boundary. At this point, the calculation is no longer valid.
Using the unscaled equation would require repeatedly extending the calculation interval
then continuing down in µ. By rescaling, the solution stays fixed in the interval and we
can easily follow the solution down to small values of µ. The results of these computations
are displayed in figures 4.8 and 4.9. They provide another nice validation of our proof.
4.11
Discussion
Spot B is essentially spot A and a ring glued together. The maximum amplitude for both
3
√
spot A and the rings scales as µ; this is much smaller than the µ 8 scaling we see for
spot B. It is surprising that spot B exhibits this large scaling considering its construction.
It also obscured its existence in the work of [22].
The method of proof used in [22] to construct the spot and ring solutions relied on
rescaling the equations with the expected amplitude. This scaling can usually be found
log(−u(0))
96
0.102 log µ − 0.171
0.25 log µ + 0.89 log | log µ| − 0.87
Spot B
log(µ)
Figure 4.10: The amplitude of spot B in three dimensions is shown as a function of µ. The data is
insufficient to fully acquire the scaling: both a linear scaling and a linear scaling multiplied by a logarithmic
1
term adequately fit the data. From the formal analysis, we expect the scaling to look like µ 4 (log µ)α for
some unknown constant α.
through computer experimentation if the solutions have already been numerically found.
The spot B solutions do not appear as solutions in those equations, and their existence
was unexpected. It would be useful to understand the mechanisms that produce spot B
in general and develop a theory to help predict where these odd solutions might arise. We
would like to find this solely from formal calculations.
The three-dimensional Swift–Hohenberg equation also exhibits spot B solutions, and
a similar approach as above should capture them. As mentioned in section 4.6, we lose
hyperbolicity around the p+ fixed point which would be an added difficulty in the proof.
This, however, provides another example of a piecewise constructed solution with an odd
scaling. In the 3D case, the scaling is hard to determine numerically; this is seen in
figure 4.10. The Swift–Hohenberg equation for every intermediate value of the dimension
n provides further examples.
For arbitrary dimension n, the P+ and P− charts are given by z+ = z1 − 1 +
n−1
2
and
97
z− = z 1 +
n−1
2
respectively. The equations in these charts are
5−n
A+
2
∂ τ A+ =
∂τ z+ = −z+
and
3−n
A−
2
∂ τ A− =
∂τ z− = z− .
From equation (7.6) in the formal analysis, we expect the scaling
5−n
d˜1 = µ 2(a−b+1) = µ 8
a
1
for general dimension n. In three dimensions, this would predict a scaling of µ 4 . This is
unfortunately a critical value for the formal analysis as b = 0, and logarithmic terms will
be important in the leading order analysis.
The formal argument in section 4.7 implies the final scaling depends on the eigenvalues
around both equilibria in a nontrivial fashion. This is not obviously the case from considering the numerical results. We can extract the scaling extremely well even when the
profiles do not exhibit any obvious non-monotonicity. From this, we expect that z1 remains
negative throughout the transition region and thus would not expect the p+ equilibrium
to crucially affect the scaling. This is clearly not the case, though. In the 3D case, the
formal argument is invalid because of the loss of hyperbolicity. It is likely that the scaling
observed actually involves logarithmic terms multiplying the decay rate, but this is difficult
to see numerically and requires involving higher order terms analytically.
Chapter
Five
Conclusion
99
5.1
Summary of main results
In this thesis, I have explored the bifurcation structure of several radially symmetric stationary families of solutions to the Swift–Hohenberg equation for various spatial dimensions. I discovered that the bifurcation curves of these solutions for dimension greater
than one do not appear to snake. Instead, a convoluted family of curves and bifurcations
is seen that connects the well understood one dimensional snaking case to the planar and
spherical cases. The two-pulses, living on isolas in one dimension, become rings in higher
dimensions. The isolas connect with the continuous snaking curves of one-pulses and eventually form snaking regions in higher dimensions. This inquiry exposed the existence of a
hitherto unknown family of spot solutions, spot B. The maximum value of these solutions
3
expressed an unexpected scaling, µ 8 , with respect to the bifurcation parameter as µ → 0.
I rigorously proved the existence of spot B in two dimensions using a novel proof which
recovers the unexpected scaling of the spot solution. This proof relies on the existence
of spot A and the rings as was established in [22]. The scaling and existence region of
spot B arises naturally from the proof, and I expect similar solutions can be found in other
systems. I have also proved the existence of spot A in three dimensions, using the same
analytic framework as in [22]. This is not included in this thesis as I expect a simpler and
cleaner proof can be constructed using the techniques from the spot B proof. The 3D rings
should also be straightforward to establish in this setting, but additional difficulties may
arise for proving the existence of spot B in three dimensions.
5.2
Open questions
Very little has been proven rigorously about snaking and the bifurcation curves seen in
chapter 3. Due to the vast number of bifurcations, and the sensitivity to the phase of the
solutions with respect to the radial variable, it seems difficult to make any progress.
100
Many questions relating to the stability of the spots and rings are completely unanswered. Not even the linearized spectrum of the planar and spherical solutions has been
computed. Unstable eigenvalues are expected to exist, such as the instability that causes
hexagons to bifurcate from spots, but it would be interesting to know how many unstable
eigenvalues there were, and what they correspond to.
The easiest first step would be a numerical study of the radially symmetric spectrum.
The radially symmetric problem is one dimensional and many techniques exist to study
it both numerically and analytically. It is more interesting to study the stability with
respect to arbitrary perturbations. This also could be done numerically, or rigorously
using the following approach. In order to study the spectrum analytically, we would let
us denote either a radially symmetric ring or spot solution which has already been shown
to exist. By considering an ansatz of the form u(r, φ, t) = us (r) + u(r)eλt+ilφ , we would
then plug this into the governing equations and solve for each λ(l). A similar analysis
using the coordinates from the spot B proof should illuminate the spectrum for arbitrary
perturbations.
The previous analytic approach in [22] required rescaling the solutions with their expected amplitude as a function of µ. As a result, it failed to reveal the spot B solutions.
I expect similarly constructed solutions may be missed in other settings because of their
odd scalings. A formal framework wherein these scalings could be found a priori would
be extremely useful in the general existence theory, however this question remains completely open. Studying several other systems might help illuminate these issues further:
these systems are the 3D Swift–Hohenberg equation, the forced complex Ginzburg–Landau
equation, and a coupled Turing–Hopf system.
Multi-pulses, such as hexagon patches, are both interesting and ubiquitous. Because
the solutions are well localized, there is hope that multi-pulses can be constructed by
gluing spots and rings together. In three dimensions, it would be interesting to find spots
concentrated on a crystal lattice structure. This work would require a detailed analysis
101
in the tails of these spot solutions. A general approach to produce multi-pulses in two
dimensions has been introduced in [41].
The study of pattern formation in the Swift–Hohenberg equation poses many interesting
and important questions. The results apply to a host of planar problems where Turing
bifurcations are the source of the interesting dynamics. The Swift–Hohenberg equation is
also one of the simplest model systems to study snaking, and could illuminate a great deal
about the general pattern forming process.
Appendix A
Proofs for Asymptotics
103
A.1
The general approach
Lemma 1.1. Fix a real constant a > 0. Consider the equation
u0 = u (a + O(u + f (x))) .
(1.1)
Let the function f (s) satisfy the condition
Z
−∞
0
|f (s)|ds ≤ C.
There is a δ > 0 such that for any initial data |u0 | < δ the equation (1.1) has solution
u(x) = ceax (1 + O() + o(eax ))
(1.2)
for x ∈ [−∞, 0].
Proof. Let x ∈ (−∞, 0], then equation (1.1) is satisfied by the solution to the fixed point
equation
u(x) = u(0)e
Rx
0
(1.3)
a+O(u(s)+f (s))ds
= u(0)eax e
Rx
0
O(u(s)+f (s))ds
.
Defining the function v(x) := e−ax u(x), this then becomes
v(x) = v(0)e
Rx
0
O(eas v(s)+f (s))ds
.
We want to solve for smooth and bounded v on the interval (−∞, 0] with the uniform norm
104
kvk∞ :
v(x) = v(0)e
≤ v(0)e
Rx
0
Rx
0
O(eas v(s)+f (s))ds
O(eas kvk∞ +f (s))ds
≤ v(0)eO(kvk∞ )+
Rx
0
O(f (s))ds
.
In the uniform norm,
kvk∞ ≤ v(0)eO(kvk∞ )+O() which has a solution by the contraction mapping principle with the estimate
v(x) = v(0) (1 + O(kvk∞ + ))
= v(0) + o(v(0))
Transforming back into u(x) finishes the proof of the lemma.
A.2
Decay estimates for the ring in the far field
Recall equation (8.1) from chapter 4
as
a
a
+ 2 + + c03 |a|2 a.
s
4s
4
(2.1)
as
a
a
+ 2+
s
4s
4
(2.2)
e−s/2
es/2
a(s) = cs √ + cu √ .
s
s
(2.3)
ass = −
The simplified equation
ass = −
has solutions
105
s , we must have c 6= 0 and c = 0. Our goal is
Clearly, for a nontrivial solution in W∞
s
u
to show equation (2.1) has decaying solutions that are to leading order the same as the
decaying solutions of (2.3). We already know this equation has a nontrivial exponentially
decaying solution with exponentially decaying derivative by [22, Lemma 4].
Lemma 2.1. There is a constant cs 6= 0 such that
e−s/2
e−s/2
qn (s) = cs √ + o( √ )
s
s
as s → ∞.
Proof. The simplified equation (2.2) has an exponential dichotomy. By projecting onto
the stable part, as we already know the solution and its derivative decay exponentially,
we have the original exponential dichotomy with a small perturbation. The solution then
persists to leading order. We could also proceed more directly and recast this as a first
q
s
order system using the approach from [22, Chapter 4]. In the variables â =
µ A and
b̂ =
√
s
µ B
this becomes
âs = b̂
b̂s =
â
+ c03 |â|2 â.
4
By using weighted norms that track the expected decay rate − 12 for the stable solution, the
c03 |â|2 â term can be seen as a small perturbation. Using the variation of constants formula
to express the solution, we can use the contraction mapping principle to find our solutions.
106
A.3
A.3.1
Corollaries for different f (s)
Corollary 1: η(ε01 )
Corollary 3.1. Our initial data in the transition chart (η(ε01 ), ε01 ) satisfies
3
3
η(ε01 ) = c01 (ε01 ) 2 + o((ε01 ) 2 )
for a constant c01 > 0.
s (ε) transversely intersects the unstable manifold of p , we can find
Proof. Because W∞
+
this relation from the solution to equation (8.5) when α+ = z̃+ = 0 and using ε+ = cε eτ :
∂ τ A+ = A+
3
τ
+ O (|A+ | + e ) .
2
By lemma 1.1, this has solution
3
3
A+ (τ ) = c01 ε+2 + o(ε+2 ).
s (ε) near its transverse intersection with the
In order for us to choose initial data in W∞
unstable manifold of p+ , it must respect this scaling.
A.3.2
Corollary 2: c1 (δ− , δ+ )
Corollary 3.2. There exists 0 such that for ε < 0 the constant c1 (δ− , δ+ ) is given by
3
c1 (δ− , δ+ ) = δ+2
p
δ− (1 + O(δ+ + δ− ))) .
Proof. Here, we just want to solve equation (5.5) from initial data of order (A1 , z1 , α1 , ε1 ) =
3
1
3
1
O(ε 8 ), −δ+ + O(ε 2 ), O(ε 4 ), O(ε 4 ) . We can find a solution to this from a proof similar
107
to that for lemma 1.1. Recall
c = ln
τ0 = − ln
δ+
1 − δ+
δ+ δ−
(1 − δ+ )(1 − δ− )
and for (A1 , α1 , ε1 ) = (0, 0, 0)
z1 (τ ) =
eτ − ec
2(eτ + ec )
for τ ∈ [−τ0 , 0]. Consider then, with τ0 > 0,
c1
Z
1
es − ec
2
= Exp
1+
+ O(|ε| )ds
2 (es + ec )
0
!
−τ0
1
1
+ τ0 O(|ε| 2 )
= e−τ0 Exp − s + log (−2(es + ec ))
2
0
−τ0
1
e−τ0 + ec τ0 O(|ε| 12 )
= e − 2 τ0
e
1 + ec
s
1
δ+ δ−
δ+ δ−
=
δ+ +
eτ0 O(|ε| 2 )
(1 − δ+ )(1 − δ− )
1 − δ−
3p
= δ+2 δ− (1 + O(δ+ + δ− ))) .
Bibliography
[1] M. Abramowitz and I. A. Stegun. Handbook of mathematical functions with formulas,
graphs, and mathematical tables. New York: Dover, 1972.
[2] V. I. Arnol0 d. Geometrical methods in the theory of ordinary differential equations,
volume 250 of Grundlehren der Mathematischen Wissenschaften [Fundamental Principles of Mathematical Science]. Springer-Verlag, New York, 1983. Translated from
the Russian by Joseph Szücs, Translation edited by Mark Levi.
[3] D. Avitabile, D. J. B. Lloyd, J. Burke, E. Knobloch, and B. Sandstede. To snake or
not to snake in the planar Swift–Hohenberg equation. SIAM J. Appl. Dynam. Syst.,
9:704–733, 2010.
[4] M. Beck, J. Knobloch, D. J. B. Lloyd, B. Sandstede, and T. Wagenknecht. Snakes,
ladders, and isolas of localized patterns. SIAM J. Math. Anal., 41(3):936–972, 2009.
[5] J. Burke and E. Knobloch. Localized states in the generalized Swift-Hohenberg equation. Phys. Rev. E, 73(5):056211, 2006.
[6] J. Burke and E. Knobloch. Homoclinic snaking: structure and stability. Chaos,
17(3):037102, 2007.
[7] J. Burke and E. Knobloch. Snakes and ladders: localized states in the Swift-Hohenberg
equation. Phys. Lett. A, 360(6):681–688, 2007.
[8] S. Chapman and G. Kozyreff. Exponential asymptotics of localised patterns and
snaking bifurcation diagrams. Phys. D, 238(3):319 – 354, 2009.
[9] K.-T. Chen. Equivalence and decomposition of vector fields about an elementary
critical point. Am. J. Math., 85(4):pp. 693–722, 1963.
[10] C. Chicone. Ordinary differential equations with applications, volume 34 of Texts in
Applied Mathematics. Springer-Verlag, New York, 1999.
[11] P. Coullet, C. Riera, and C. Tresser. Stable static localized structures in one dimension.
Phys. Rev. Lett., 84(14):3069–3072, 2000.
[12] M. Cross and P. Hohenberg. Pattern formation outside of equilibrium. Rev. Mod.
Phys., 65(3):851–1112, 1993.
[13] J. H. P. Dawes. The emergence of a coherent structure for coherent structures: localized states in nonlinear systems. Phil. Trans. R. Soc. A, 368(1924):3519–3534,
2010.
108
109
[14] E. J. Doedel and B. Oldeman. auto07p: continuation and bifurcation software for
ordinary differential equations. Technical report, Concordia University, 2009.
[15] C. Elphick, E. Tirapegui, M. E. Brachet, P. Coullet, and G. Iooss. A simple global
characterization for normal forms of singular vector fields. Phys. D, 29(1-2):95–127,
1987.
[16] P. C. Fife. Pattern formation in gradient systems. In B. Fiedler, editor, Handbook of
Dynamical Systems 2, pages 679–719. North-Holland, Amsterdam, 2002.
[17] C. Gollwitzer, I. Rehberg, and R. Richter. Via hexagons to squares in ferrofluids:
experiments on hysteretic surface transformations under variation of the normal magnetic field. J. Phys.: Condensed Matter, 18(38):S2643, 2006.
[18] J. Guckenheimer and P. Holmes. Nonlinear oscillations, dynamical systems, and bifurcations of vector fields, volume 42 of Applied Mathematical Sciences. Springer-Verlag,
New York, 1983.
[19] R. B. Hoyle. Pattern Formation. Cambridge University Press, Cambridge, 2006.
[20] E. Knobloch. Spatially localized structures in dissipative systems: open problems.
Nonlinearity, 21(4):T45–T60, 2008.
[21] J. Knobloch, D. Lloyd, B. Sandstede, and T. Wagenknecht. Isolas of 2-pulse solutions in homoclinic snaking scenarios. J. Dynam. Diff. Eqns., 23:93–114, 2011.
10.1007/s10884-010-9195-9.
[22] D. J. B. Lloyd and B. Sandstede. Localized radial solutions of the Swift–Hohenberg
equation. Nonlinearity, 22(2):485–524, 2009.
[23] D. J. B. Lloyd, B. Sandstede, D. Avitabile, and A. R. Champneys. Localized hexagon
patterns of the planar Swift–Hohenberg equation. SIAM J. Appl. Dynam. Syst.,
7:1049–1100, 2008.
[24] S. McCalla and B. Sandstede. Snaking of radial solutions of the multi-dimensional
Swift–Hohenberg equation: A numerical study. Phys. D, 239(16):1581 – 1592, 2010.
[25] S. McCalla and B. Sandstede. Existence of 2D and 3D spots in the stationary radial
Swift-Hohenberg equation. In preparation, 2011.
[26] J. D. Murray. Mathematical biology. II, volume 18 of Interdisciplinary Applied Mathematics. Springer-Verlag, New York, third edition, 2003. Spatial models and biomedical
applications.
[27] NIST. http://dlmf.nist.gov/7.5, accessed on 15 March 2011.
[28] L. M. Pismen. Patterns and Interfaces in Dissipative Dynamics. Springer Verlag,
Berlin, 2006.
[29] H.-G. Purwins.
http://www.uni-muenster.de/Physik.AP/Purwins/DC/indexen.html, accessed on 14 October 2010.
[30] M. I. Rabinovich, A. B. Ezersky, and P. D. Weidman. The Dynamics of Patterns.
World Scientific Publishing, River Edge, 2000.
[31] R. Richter and I. V. Barashenkov. Two-dimensional solitons on the surface of magnetic
fluids. Phys. Rev. Lett., 94(18):184503, May 2005.
110
[32] B. Sandstede. Stability of travelling waves. In Handbook of dynamical systems, Vol.
2, pages 983–1055. North-Holland, Amsterdam, 2002.
[33] A. Scheel. Subcritical bifurcation to infinitely many rotating waves. J. Math. Anal.
Appl., 215(1):252–261, 1997.
[34] A. Scheel. Radially symmetric patterns of reaction-diffusion systems. Mem. Amer.
Math. Soc., 165(786), 2003.
[35] E. Sheffer, H. Yizhaq, E. Gilad, M. Shachak, and E. Meron. Why do plants in
resource-deprived environments form rings? Ecological Complexity, 4(4):192 – 200,
2007.
[36] J. Swift and P. C. Hohenberg. Hydrodynamic fluctuations at the convective instability.
Phys. Rev. A, 15(1):319–328, 1977.
[37] A. M. Turing. The chemical basis of morphogenesis. Phil. Trans. R. Soc. London B,
237(641):37–72, 1952.
[38] G. H. M. van der Heijden, A. R. Champneys, and J. M. T. Thompson. Spatially
complex localisation in twisted elastic rods constrained to a cylinder. Internat. J.
Solids Structures, 39:1863–1883, 2002.
[39] M. K. Wadee, C. D. Coman, and A. P. Bassom. Solitary wave interaction phenomena
in the strut buckling model incorporating restabilisation. Phys. D, 163(1-2):26–48,
2002.
[40] P. D. Woods and A. R. Champneys. Heteroclinic tangles and homoclinic snaking
in the unfolding of a degenerate reversible Hamiltonian-Hopf bifurcation. Phys. D,
129(3-4):147–170, 1999.
[41] S. Zelik and A. Mielke. Multi-pulse evolution and space-time chaos in dissipative
systems. Mem. Amer. Math. Soc., 198(925):vi+97, 2009.