A Multiple Degree of Freedom ... Single Vibrating Transducer James Douglass Penn

A Multiple Degree of Freedom Actuator
Using a
Single Vibrating
Transducer
by by
MASSACHUSETTS
OF TECHNOLOGY
JUN 28 2012
James Douglass Penn
Submitted to the Department of Mechanical Engineering in partial fulfillment of the requirements for the degree of
LUBRARIES
LIBRARIES
ARCHIVES
Doctor of Philosophy at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2012
@
Massachusetts Institute of Technology 2012. All rights reserved.
Author....................
Departm t of
......... ........ .......
Mechanical Engineering
May 18, 2012
Certified by.......................
...
.,. .. .
.. . . .. ..
David R. Wallace
Professor
Thesis Supervisor
Accepted by ............................................
David E. Hardt
Chairman, Department Committee on Graduate Theses
2
A Multiple Degree of Freedom Actuator Using a Single
Vibrating Transducer by
James Douglass Penn
Submitted to the Department of Mechanical Engineering on May 18, 2012, in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
Abstract
Multiple degree of freedom actuation typically requires one actuator for each degree of freedom, where each actuator requires its own heavy and expensive transducer to transform an electrical input signal into a useful mechanical output. Mechanisms can be used to split the output of a single motor, but the resulting systems are often complex, large, heavy, and noisy. Some also lack true independence of outputs.
This thesis develops and demonstrates a novel system for multiple degree of freedom actuation using a single transducer to achieve independent, bi-directional control of multiple degrees of freedom. The resulting system is mechanically simple, compact, lightweight, easy to control, and potentially inexpensive.
The Multiple Degree of freedom Actuator (MDA) comprises i) a single vibrating transducer and ii) a parallel network of resonators. Each resonator is tuned to its own unique resonant frequency and drives its own degree of freedom.
First, it is shown that the MDA can actuate independently multiple degrees of freedom with a single transducer by selectively exciting the resonant frequencies of one or more resonators, which then drive their respective degrees of freedom. Both numerical simulation and physical prototypes are used to verify the results.
Second, a simple, compact resonator/rectifier mechanism is developed and fabricated using flexures that convert oscillating motion of a resonator to useful, continu-
ous, bi-directional rotation of an output rotor without crosstalk between outputs.
Third, the theoretical efficiency of the MDA, driven by an electromagnetic transducer, is derived. An efficient, low-moving-mass moving magnet transducer is developed and shown to greatly improve theoretical system efficiency.
Finally, a hypocycloid speed reducer mechanism is developed and fabricated to achieve a very high reduction ratio in a compact package with greater simplicity and improved performance.
Thesis Supervisor: David R. Wallace
Title: Professor
3
4
Acknowledgments
I would like to thank the following people for their help during the development of this thesis:
I am indebted to the members of my thesis committee MIT Professors David R.
Wallace, J. Kim Vandiver, and Daniel D. Frey for their help in guiding this thesis to fruition.
Professor Wallace was my research advisor during my entire time as a graduate student at MIT. I am sincerely grateful for the opportunity to have worked with him and for his unfailing support and guidance over many years. It's difficult to fully grasp all that I've had the privilege of learning from Professor Wallace about mechanical engineering, design, education, and work ethic, all taught by his own personal example. He has had a profound impact on mechanical engineering education at MIT and on my own education as well.
Professors Vandiver and Frey have been fantastic to have as members of my thesis committee. I am grateful for their invaluable advice and suggestions that helped to shape the research itself and to clarify its presentation.
I am grateful for the privilege of working with two MIT professors as a teaching assistant: Professors Timothy G. Gutowski and Anthony T. Patera.
Professor Gutowski taught me Manufacturing Processes and Systems in 2008 and
I was fortunate to be his teaching assistant for the course two years later. It was truly a pleasure both to learn from him and to work with him.
Professor Patera gave me the opportunity to be his teaching assistant for the undergraduate class Numerical Computation for Mechanical Engineers, also known as 2.086, on which I worked with him for three semesters. Working with Professor
Patera was, without a doubt, one of my most rewarding experiences at MIT. Professor
Patera encouraged me to grow as a teacher, as a designer, as an engineer, and as a person in ways that far exceeded my own expectations. I will always be grateful to him for believing in me more than sometimes I believed in myself.
I am grateful for the help of many very talented staff at MIT.
5
Leslie Regan and Joan Kravit in the Mechanical Engineering Graduate Office always helped me to stay on track with the administrative details of pursuing a
Ph.D.
Maureen Lynch, Chevalley Duhart, and Debra Blanchard were all excellent administrative assistants with whom I'm grateful to have worked.
Dr. Barbara Hughey was always very generous with advice and equipment whenever I needed it.
Dick Fenner and the Pappalardo Laboratory staff, as well as Bill Buckley and the
LMP Machine Shop staff, helped me many times with machining, waterjet cutting, hardware, and advice.
Mark Belanger at the Edgerton Shop taught me as much about machining and good design practice as I might have learned in a full course on the subject. I will always appreciate his patience and willingness to help above and beyond what was expected.
I am grateful for the help, camaraderie, and friendship of many fellow Cadlab students, past and present: Amy Banzaert, Matt Blanco, Qing Cao, Andrew Carvey,
Jason Chatzakis, Paul Fathallah, Bill Fienup, Sangmok Han, Chandler Hatton, Mike
Jensen, Barry Kudrowitz, Melody Kuna, Ming Leong, Lindy Liggett, Tom Ligon,
Wei Mao, Jeff Mekler, Taylor Morris, Ilan Moyer, Jake Muhleman, Emily Obert,
Ben Pope, Sarah Reed, Monica Rush, Ariadne Smith, Paula Te, Alan Skaggs, Sittha
Sukkasi, Sungmin Kim, Sunyoung Kim, Geng Tan, Mika Tomczak, Jessica Vechakul, and My Vu.
Special thanks go to Steven Keating and Geoff Tsai for their valuable feedback in preparing for my thesis defense presentation.
I am grateful for the friends I made while at MIT: Raymond Cheng, Nancy Chow,
Juei Lee, Sungho Lee, Sungyon Lee, Ben Peters, Steven Peters, Teresa Peters, Stephen
Steger, Bettina Tso, Mint Wongviriyawong, Tony Yu, Yang Zhang, and many others helped to brighten the time I spent outside of lab.
I could always count on Sungmin Son to be there whenever I needed help. I'm grateful for the many adventures we've had together and the true friendship he's
6
demonstrated throughout.
Crystal Law supported and encouraged me through thick and thin. Together we celebrated many successes and commiserated over even more failures. I'm grateful for all the memories we share.
I am grateful for my family. I feel incredibly blessed to have had such wonderful and loving parents, sisters, brothers-in-law, nephews, nieces, grandparents, uncles, aunts, and cousins. I am especially grateful to Mom and Dad for everything that they've given me and their constant support in prayer.
Finally, I am grateful to God, without Whom, I couldn't have done any of this.
Philippians 4:13
7
8
Contents
1 Introduction 19
1.1 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 Motivation 23
3 Prior Art 27
3.1 Single Motor Animatronic Toys . . . . . . . . . . . . . . . . . . . . . 27
3.2 Unidrive robotics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2.1 Unidrive Gantry Robot with PWM Control . . . . . . . . . . 29
3.2.2 Unidrive arm manipulator with PWM Control . . . . . . . . . 29
3.2.3 Unidrive Hyper-Redundant Manipulators . . . . . . . . . . . . 29
3.2.4 Unidrive Teleoperated Hand . . . . . . . . . . . . . . . . . . . 31
3.3 Summary of Prior Art . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4 Multiple Degree of freedom Actuator (MDA) Overview 35
5 The MDA Resonator 39
5.1 M otivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.2 MDA Mechanical Model . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3 Impedance Analogy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.4 Single Resonator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.5 MDA with a Single Resonator . . . . . . . . . . . . . . . . . . . . . . 44
5.6 MDA with Multiple Resonators . . . . . . . . . . . . . . . . . . . . . 48
5.7 Verification: MDA 1. . . . . . . . . . . . . . . . . . . . . . . . . . .
52
9
5.8 M DA 1.0 Problem s ............................
54
6 The
6.1
MDA Rectifier 55
M otivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
6.2
6.3
The Standing Wave Ultrasonic Motor . . . . . . . . . . . . . . . . . .
55
The MDA Resonator/Rectifier . . . . . . . . . . . . . . . . . . . . . .
56
6.4
6.5
6.6
6.7
6.8
Resonator/Rectifier Dynamic Model . . . . . . . . . . . . . . . . . . .
57
Resonator/Rectifier Dynamic Simulation .
. . .
. . . . . . . . . . . .
61
The Resonator/Rectifier Flexure . . . . . . . . . . . . . . . . . . . . .
61
A Compact, Bidirectional Resonator/Rectifier . . . . . . . . . . . .
61
Parallel Beam Flexure Power Transfer Capacity . . . . . . . . . . . .
65
7 The MDA Transducer
7.1
7.2
M otivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Electromagnetic Transducer . . . . . . . . . . . . . . . . . . . . . . .
7.3
7.4
7.5
7.6
7.7
7.8
Analytical Approach . . . . . . . . . . . . . . . . . . . . . . . . . . .
Single Oscillator with Ideal Force Input and Viscous Load . . . . . .
Oscillator with Lossy Electromagnetic Transducer and Viscous Load .
Efficiency of Single-Resonator MDA . . . . . . . . . . . . . . . . . . .
7.6.1 Efficiency of Single-Resonator MDA at Low Frequencies .
. . .
7.6.2 Efficiency of Single-Resonator MDA at Peak (wi
wooi) .
. .
MDA Efficiency Summary . . . . . . . . . . . . . . . . . . . . . . . .
Design of a High bT, Low mo Moving Magnet Transducer . . . . . . .
7.9
A Prototype Moving Magnet Transducer . . . . . . . . . . . . . . . .
69
69
70
70
72
84
85
87
88
75
79
82
8 The MDA Speed Reducer
8.1
8.2
M otivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Planetary Gear Reducer . . . . . . . . . . . . . . . . . . . . . . . .
8.3
8.4
8.5
A Hypocycloid Speed Reducer . . . . . . ... . . . . . . . . . . . . . .
Conventional Hypocycloid Speed Reducer Drawbacks . . . . . . . . .
MDA Hypocycloid Speed Reducer Improvements . . . . . . . . . . .
93
93
93
94
97
98
10
9 Conclusions and Future Work 101
9.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
9.2 Future W ork . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
A Selected Matlab programs
A.1 Matlab program for generating pole-zero plots and frequency response
103 of MDA with ideal force source . . . . . . . . . . . . . . . . . . . . . 103
A.2 Matlab function for loading parameter structure for use with nonlinear dynam ic simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
A.3 Matlab program for deriving efficiency of MDA with single resonator as a function of tuning . . . . . . . . . . . . . . . . . . . . . . . . . .111
A.4 Matlab ode45-compatible function for nonlinear dynamic simulation of resonator/rectifier . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
A.5 Matlab program for animating a nonlinear dynamic simulation of the resonator/rectifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
11
12
List of Figures
1-1 A two stage MDA system with moving magnet transducer (lower left) 21
1-2 A compact MDA resonator stage with integral 100:1 hypocycloid speed reducer (bottom view) . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1-3 A compact MDA resonator stage with integral 100:1 hypocycloid speed reducer (top view) . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
2-1 Actuators (left) and resonators (right) . . . . . . . . . . . . . . . . . 24
2-2 MIT 2.086 Friendly Robot Arm . . . . . . . . . . . . . . . . . . . . . 25
3-1 Baby Furby" (Hasbro). . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3-2 Serial and parallel unidrive robot configurations (Karbasi [10]). ..... 29
3-3 Unidrive gantry robot. (Karbasi [9]) . . . . . . . . . . . . . . . . . .
30
3-4 Unidrive arm manipulator. (Li [11]) . . . . . . . . . . . . . . . . . .
30
3-5 RT1 bending mechanism. (Li [12]) . . . . . . . . . . . . . . . . . . .
31
3-6 Hyper-redundant unidrive robot by Ananiev, et al. [1]. . . . . . . . .
32
3-7 unidrive teleoperated hand by Jia, et al. [8]. . . . . . . . . . . . . . .
32
4-1 MDA conceptual diagram with three out of three output resonators activated . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
4-2 MDA conceptual diagram with two out of three output resonators activated . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
4-3 MDA functional block diagram. . . . . . . . . . . . . . . . . . . . . . 37
5-1 MDA block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5-2 M DA m odel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
13
5-3 Impedance analogy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5-4 Single resonator with displacement/velocity input; equivalent circuit . 42
5-5 Single resonator pole zero plot (top) and transfer function frequency response (bottom). Note: complex conjugate pole and large, negative real zero not shown . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5-6 Single resonator pole zero plot (top) and transfer function frequency response (bottom). Note: complex conjugate pole and large, negative real zero not shown . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5-7 Single resonator and primary oscillator with force excitation; equivalent circu it. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5-8 Primary oscillator and secondary resonator pole zero plots and transfer function frequency responses for single resonator MDA . . . . . . . . 49
5-9 Multiple resonators and primary oscillator with force excitation; equivalent circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5-10 Primary oscillator and secondary resonators pole zero plots and transfer function frequency responses for three resonator MDA . . . . . . . 51
5-11 M D A 1.0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
5-12 MDA 1.0 primary oscillator and secondary resonators pole zero plots and transfer function frequency responses and measured output speed frequency response ....... ............................ 53
6-1 MDA block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6-2 Sashida's "woodpecker-type" standing wave ultrasonic motor (Uchino
[15]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 6
6-3 The resonator/rectifier driving a rotor via an elliptical pattern of motion 57
6-4 Resonator/Rectifier dynamic model . . . . . . . . . . . . . . . . . . . 58
6-5 Resonator/Rectifier contact detail (exploded view; surfaces are in contact) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6-6 Resonator/Rectifier contact stick/slip state diagram . . . . . . . . . . 60
6-7 Resonator/Rectifier dynamic simulation at 142 Hz . . . . . . . . . . . 62
14
6-8 Resonator/Rectifier dynamic simulation at 113 Hz . . . . . . . . . . . 62
6-9 The resonator/rectifier flexure driving a rotor via an elliptical pattern
of m otion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6-10 Elliptical motion of resonator/rectifier and output rotation of rotor 64
6-11 A rectifier/resonator flexure configuration for bidirectional control
.
64
6-12 A particularly compact rectifier/resonator flexure configuration for bidirectional control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6-13 A parallel beam flexure . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6-14 Final flexure design . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
7-1 MDA block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7-2 Current loop showing the Lorentz force (left) caused by the current i and the motional emf (right) caused by the velocity u. . . . . . . . . 71
7-3 Electromagnetic transducer equivalent circuit. . . . . . . . . . . . . . 71
7-4 Damped, harmonic oscillator with viscous load and ideal force input; equivalent circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
7-5 Damped, harmonic oscillator with viscous load and lossy electromagnetic transducer; equivalent circuit. . . . . . . . . . . . . . . . . . . . 76
7-6 Maximum efficiency qO as a function of o-o. . . . . . . . . . . . . . . . 79
7-7 Primary and secondary oscillators with lossy electromagnetic transducer driving primary and viscous load on secondary. . . . . . . . . . 80
7-8 Maximum efficiency TI1 as a function of driving frequency wi for optimal load b3
1
(wi) (Frequency normalized with respect to wooi)........ 83
7-9 Loss coefficient versus Young's modulus (Ashby
[3])
. . . . . . . . . .
86
7-10 Coil partitioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
7-11 Hard disk drive magnet (mass = 9 g) . . . . . . . . . . . . . . . . . . 89
7-12 22 AWG coil and tape-wound core . . . . . . . . . . . . . . . . . . . . 89
7-13 The finished moving magnet transducer prototype . . . . . . . . . . . 90
7-14 Efficiency comparison between MDA 1.0 with moving coil and with moving magnet prototype (simulated) . . . . . . . . . . . . . . . . . . 91
15
8-1 MDA block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
8-2 Tamiya planetary gearbox ([14]) . . . . . . . . . . . . . . . . . . . . . 94
8-3 5:1 single stage planetary gear set . . . . . . . . . . . . . . . . . . . . 95
8-4 10:1 hypocycloid speed reducer . . . . . . . . . . . . . . . . . . . . .
96
8-5 50:1 hypocycloid speed reducer . . . . . . . . . . . . . . . . . . . . .
97
8-6 Exploded view of a conventional hypocycloid speed reducer ([17]) .
.
98
8-7 Two DOF flexure flexibly couples inner gear to output shaft . . . . . 99
8-8 Doubly supported speed reducer output shaft and freely spinning input rotor ......... .................................... 99
9-1 MDA block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
16
List of Tables
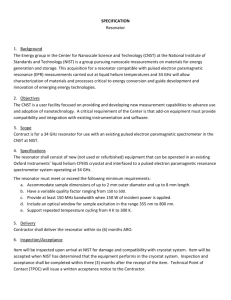
6.1 Maximum power transfer density of a bending beam MDA resonator for several engineering materials, given 6 max = 3 mm. . . . . . . . . .
67
7.1 Maximum efficiency ro for three values of o. . . . . . . . . . . . . . . 78
7.2 Comparison of MDA 1.0 moving coil transducer and moving magnet prototype . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
17
18
Chapter 1
Introduction
This thesis introduces a new method of actuating multiple degrees of freedom. The
Multiple Degree of freedom Actuator (MDA) distributes vibrational energy from a single vibrating transducer to a plurality of resonator outputs having distinct resonant frequencies and driving separate degrees of freedom. We show that the MDA can control multiple degrees of freedom independently and simultaneously, making it an effective replacement for more traditional systems using individual actuators for each controlled degree of freedom. We also show that the MDA has several advantages over traditional systems, including lower weight and lower cost. We compare the
MDA to state of the art systems for actuating multiple degrees of freedom from a single transducer and show that the MDA offers significant advantages in simplicity and generality.
Considering that most actuator applications require a continuous motion rather than an oscillating motion, we design a resonator/rectifier output mechanism, based on the Standing Wave Ultrasonic Motor, that rectifies the oscillating motion of an
MDA output stage simply and reliably at any frequency. We confirm the behavior of the resonator/rectifier mechanism by both time-domain simulation based on a dynamic model and by experiment.
By operating at relatively high frequencies, the MDA can transfer mechanical power from the vibrating transducer to the oscillating outputs at relatively small vibration amplitudes. This affords an opportunity in the design of the resonator/rec-
19
tifier output stages to employ simple, parallel-beam flexures that provide both compliance and constraint in a single package. We show that, by operating at high frequencies, we can achieve a power density from the bending-beam flexures that exceeds that of typical transducers and that increases with decreasing size. This favorable scaling, combined with a simple flexure design compatible with micro-manufacturing processes, suggests an exciting opportunity in the field of micro-scale actuation.
We develop a frequency-domain model for the efficiency of the MDA with an electromagnetic transducer and show analytically that the efficiency of the system increases with increasing transducer efficiency, decreasing transducer moving mass, and increasing coupling stiffness of the resonator outputs.
We consider the design of a high-efficiency, low-moving-mass electromagnetic transducer for use with the MDA and show that, for a moving coil design, high transducer efficiency and low moving mass require high coil volume and low coil volume, respectively, and are, therefore, conflicting design objectives. We instead propose a moving magnet electromagnetic transducer design that can achieve both high transducer efficiency and a low moving mass with a large, stationary coil and a light moving magnet. We design and build a moving magnet electromagnetic transducer and compare its performance to that of an existing moving coil transducer.
We consider the design of a speed reducer mechanism to transform the highspeed, low torque output of the resonator/rectifier to a low-speed, high-torque output suitable for most motion control tasks. The conventional hypocycloid speed reducer seems ideal for the task, but has several disadvantages related to its need for precision pins and rollers at its output and the extended bearing structure supporting its output shaft. We design and build a modified hypocycloid speed reducer that replaces a complicated pin and roller output assembly with a monolithic flexure design and that takes advantage of the resonator/rectifier geometry to provide an output shaft extending through the structure and supported at both ends, resulting in a compact design.
20
1.1 Contributions
The primary contibution of this thesis is the identification of the Multiple Degree of freedom Actuator (MDA) as a novel method of actuating multiple degrees of freedom with a single transducer. With this method, multiple degree of freedom systems can potentially be simplified and made lighter and cheaper. This opens new areas for research in MEMS, robotics, and many other areas where actuation typically incurs a high cost in weight and/or expense.
A complete MDA system was designed and fabricated, comprising an efficient, low moving mass electromagnetic transducer, a simple and effective resonator/rectifier, and a compact hypocycloid speed reducer. The MDA demonstrated independent control of multiple, bi-directional outputs without crosstalk using a single vibrating transducer. The system is mechanically simple, compact, lightweight, easy to control, and potentially inexpensive.
Figure 1-1 shows a functional MDA system with two resonator outputs and a moving magnet transducer. Figures 1-2 and 1-3 show top and bottom views of a compact MDA resonator stage with an integral 100:1 hypocycloid speed reducer.
Figure 1-1: A two stage MDA system with moving magnet transducer (lower left)
21
Figure 1-2: A compact MDA resonator stage with integral 100:1 hypocycloid speed reducer (bottom view)
Figure 1-3: A compact MDA resonator stage with integral 100:1 hypocycloid speed reducer (top view)
22
Chapter 2
Motivation
A degree of freedom (DOF) is an independent direction of translation or axis of rotation in or about which a body can move. The total number of degrees of freedom
(DOFs) in a mechanical system is given by the minimum number of independent coordinates that completely define the system's configuration. For example, a train on a track has one DOF because one coordinate, its displacement along the track, completely defines its configuration. A human arm has seven DOFs because seven coordinates (three angles of rotation at the shoulder, one angle of rotation at the elbow, and three angles of rotation at the wrist) completely define its configuration.
To control a multiple DOF mechanical system, we typically require one actuator for each controlled DOE. For example, to control a four DOF system, we might first consider using the four actuators-two stepper motors and two servo motorsshown on the left of Figure 2-1. In this thesis, we will consider a novel approach to multiple DOF actuation that, for the given example, could replace the four expensive and heavy actuators on the left of Figure 2-1 with the four simple, inexpensive, and lightweight resonators shown on the right, controlled by a single vibrating transducer.
There are several reasons for replacing multiple actuators with multiple resonators and a single vibrating transducer. We consider the example of a small, drawing robot arm, shown in Figure 2-2, which was built as a demonstration robot for the MIT class
2.086 [13] with Prof. Anthony T. Patera. The robot has three DOFs at the waist, shoulder, and elbow, with a servo at each joint.
23
Figure 2-1: Actuators (left) and resonators (right)
We can learn a number of lessons from the 2.086 Friendly Robot Arm. First, actuators are expensive. The cost of the three hobby servos-which, as actuators go are actually relatively inexpensive-is approximately half of the cost of the robot, even including the Arduino microcontroller [2].
Second, actuators are heavy. The weight of one servo is greater than the total mass of the two arm links, even though the servo is one quarter of the volume. If a servo had been placed directly at the elbow, the additional moving mass of the servo would have been seriously detrimental to the arm dynamics. Instead, the servo was placed at the shoulder and a cable drive transmission was used to control the elbow joint. This approach added significant complexity to the design.
In summary, actuators are expensive and heavy. If we can replace multiple actuators with multiple inexpensive and lightweight resonators, we can potentially reduce cost, weight, and complexity of our multiple DOF systems.
24
Figure 2-2: MIT 2.086 Friendly Robot Arm
25
26
Chapter 3
Prior Art
The traditional approach to multiple degree of freedom actuation is to have each DOF driven by a separate actuator. Although this "one actuator per DOE" approach works well, for example, for large industrial robots, it is less suitable for applications where the weight, size, and/or cost of multiple actuators can become an issue. Two such areas are animatronic toys and unidrive robotics.
3.1 Single Motor Animatronic Toys
This thesis was originally motivated by actuation methods for animatronic toys. Because toys must be manufactured with very low cost, animatronic toys that have multiple DOFs often use a single motor to drive them all. Figure 3-1(a) shows the
TM
Baby Furby toy sold by Hasbro, Inc. [7] in 2006. Figure 3-1(b) shows the actuation mechanism comprising, in the top half, a single DC motor and, in the bottom half, a complex system of gears and cams. A predetermined motion sequence can be played in both forward and reverse directions to actuate the hips, mouth, and eye DOFs through a small number of sub-sequences corresponding to various actions
(eating, sleeping, etc.). Thus, this approach emulates-but does not truly provideindependent control of multiple degrees of freedom.
27
(a) Baby Furby (b) Baby Furby single motor actuation mechanism
Figure 3-1: Baby Furby" (Hasbro).
3.2 Unidrive robotics
The field of unidrive robotics represents a slightly more sophisticated approach to single motor multiple DOF actuation. Karbasi et al. [10] describe the goal and methodology of "unidrive modular robots" in the following way:
Unidrive modular robots because of employing only a single drive for operating all the joints have a substantial advantage over regular modular robots in terms of the mass of each module. The drive is mounted at the robot base and all joints tap power from the single drive using clutches. By controlling the engagement time of the clutches, the position and velocity of the joints are regulated.
The unidrive concept can be applied in both series and parallel arrangements, as shown in Figure 3-2.
28
s"
Mechanical
Drive I
Flexible
Mechanical
DriveShafts swM
JUL
To the
0)0) swM
Flexible
Shf
erSW Clutch
Train
Distributor to the next mdule
(b) Parallel
4
PN
(a) Series
Figure 3-2: Serial and parallel unidrive robot configurations (Karbasi
[10]).
Module 2
3.2.1 Unidrive Gantry Robot with PWM Control
Karbasi et al. [9] fabricated a unidrive xy gantry robot using a parallel unidrive configuration, as shown in Figure 3-3. The gantry robot used a single stationary motor driving the two axes via flexible shafts. Two clutches for each axis permitted bi-directional control. PWM control of the clutches was implemented and trajectory tracking was demonstrated for a step, sinusoid, and circular path at a PWM frequency of 10 Hz.
3.2.2 Unidrive arm manipulator with PWM Control
Li et al. [11] fabricated a unidrive arm manipulator, shown in Figure 3-4, with six joints, each having two clutches and one brake. Like Karbasi, Li implemented velocity control of the joints with a discontinuous PWM controller design having a
PWM frequency of 10 Hz and a variable duty ratio, successfully demonstrating line tracking and arc tracking capabilities.
3.2.3 Unidrive Hyper-Redundant Manipulators
In the area of hyper-redundant manipulators, manipulators typically having ten or more DOFs, there have been numerous efforts to replace multiple actuators with a single actuator for the sake of reducing weight.
29
x-axis
\
Single stationary motor y-axis
/
Mechanical drive of x-axis
/
Mechanical drive of y-axis
V0
Flexible shafts
Figure 3-3: Unidrive gantry robot. (Karbasi [9])
Figure 3-4: Unidrive arm manipulator. (Li [11])
In 2003, Li et al. [12] reported a novel hyper-redundant manipulator RT1, which used only a single motor to actuate its multiple joints. Rotation of the single motor was transmitted throughout the length of the manipulator by a series of universal
30
joints. Bending of the manipulator was controlled by using electromagnetic clutches to engage and disengage specially designed worm and gear sets connecting the bend mechanism at each joint with the main transmission, as shown in Figure 3-5. By actuating the electromagnetic clutches with discrete pulses, the joint angles could be adjusted in integral multiples of 0.1 degree, similar to a stepper motor, eliminating the need for feedback.
module n-I special worn impulse power mnput module n big gear
\impulse module n+I electromagnetic clutch electromagnetic clutch support frame driving axis small gear
Worm gear driving axis universal joint
Figure 3-5: RT1 bending mechanism. (Li [12])
Ananiev et al. [1] reported a similar design for a unidrive hyper-redundant manipulator using a single motor and a series of electromagnetic clutches for joint control, as shown in Figure 3-6. By using a set of reversing wheels and corresponding clutches in each joint, they were able to achieve bi-directional control from a single, irreversible motor.
3.2.4 Unidrive Teleoperated Hand
Jia et al. [8] describe a dexterous hand driven by a single motor and a system of 7 bi-directional, electromagnetic clutches controlling as many joints on three fingers, as shown in Figure 3-7. The outputs of the clutches directly drive worm gears at the base of each finger. Thin steel ropes then transfer the motion to the finger joints.
31
Figure 3-6: Hyper-redundant unidrive robot by Ananiev, et al. [1].
actuation box index and middle finger thumb finger
Figure 3-7: unidrive teleoperated hand by Jia, et al. [8].
3.3 Summary of Prior Art
Previous approaches to multiple DOF actuation using a single motor all seem to suffer from various shortcomings.
In the case of single motor animatronic toys, the control of the actuation is limited to the sequence determined by the particular arrangement of the complex and noisy internal mechanisms.
32
In the case of unidrive robotics, although true independent control of multiple
DOFs is possible, the mechanisms required seem almost as bulky, heavy, and expensive as the systems they attempt to replace.
In both cases, the mechanisms employed are difficult to generalize to applications much different from those for which they were designed.
Accordingly, we wish to develop a system for multiple DOF actuation using a single transducer that overcomes these shortcomings.
33
34
Chapter 4
Multiple Degree of freedom
Actuator (MDA) Overview
The Multiple Degree of freedom Actuator (MDA) uses a single vibrating transducer and a parallel network of resonators, with each resonator tuned to its own unique resonant frequency, to actuate independently multiple degrees of freedom.
Figure 4-1 shows an MDA with three output resonators and, thus, three degrees of freedom (DOFs). Resonators 1, 2, and 3 resonate at frequencies fi, f2, and f3, respectively. The single transducer at the bottom left generates a mechanical vibration consisting of, in this case, a superposition of frequencies fi, f2, and f3.
This mechanical vibration is transmitted identically to each of the three resonators, which respond individually to their respective resonant frequencies. Because, in this case, all three resonant frequencies are present in the raw input signal, all three output resonators are activated.
Figure 4-2 shows the same MDA as before, but, in this case, the single transducer generates a mechanical vibration consisting of a superposition of only frequencies fi and f2. Because only two resonant frequencies are present in the raw input signal, only resonators 1 and 2 are activated.
Figure 4-3 shows a functional block diagram of a complete MDA system. The transducer transforms an input electrical signal to a mechanical vibration having, in the general case, multiple frequencies superimposed. The resonator responds to
35
resonator 2
f2
Mf3 f,,If2,f3 single, vibrating transducer
Figure 4-1: MDA conceptual diagram with three out of three output resonators activated.
(vibrates with relatively large amplitude in response to) one of those multiple frequencies, if it is present in the superimposed signal. The rectifier transforms the vibrations of the resonator into high-speed, low-torque continuous rotation of a rotor.
Finally, the speed reducer transforms the high-speed, low-torque rotation of the rotor to a low-speed, high-torque rotation of an output shaft that is more suitable for most motion control applications.
Chapter 5 shows how a network of resonators can actuate multiple degrees of freedom using a single vibrating transducer. Chapter 6 shows how we can then transform the vibration of a resonator into a useful, continuous motion output of a rotor. Chapter 7 shows the role of the transducer, in particular, an electromagnetic transducer, in determining system efficiency. Finally, Chapter 8 shows how we can design a speed reducer for our system that achieves a high reduction ratio in a compact and simplified package.
36
resonator 2
2 single, vibrating transducer
Figure 4-2: MDA conceptual diagram with two out of three output resonators activated.
Figure 4-3: MDA functional block diagram.
37
38
Chapter 5
The MDA Resonator
5.1 Motivation
Figure 5-1: MDA block diagram
The key component of the MDA is the resonator, which acts as a mechanical filter that allows us to selectively actuate specific outputs based on the frequency content of a single vibrating source.
5.2 MDA Mechanical Model
Figure 5-2 shows a simplified MDA mechanical model, in which we have represented the transducer as an ideal force source FO with mass m, suspension stiffness ko, and intrinsic mechanical damping bo (labeled, but not shown). Note that each spring k, in our model is assumed to have some intrinsic mechanical damping b2, which we model
39
as viscous damping. Coupling springs koi to ko, with intrinsic mechanical damping boi to bon connect the primary mass mo to secondary masses moi to mn. Springs ki to kn also connect the secondary masses to ground. Often, these springs will represent bearing stiffness and/or will serve to raise the natural frequencies and the maximum output power of the resonators.
ko bo ko1 bo1 x
1 k02 b
0 2 x
2 koa b
0 3 k1 mi bL1 k2
M2 bL2 k3 b3
M3
X3
**Mn kon bon kn xn x0
Figure 5-2: MDA model.
Thus, we have a parallel network of resonators all coupled to a single primary moving mass.
5.3 Impedance Analogy
Throughout this thesis, we will make use of the impedance analogy
[4]
for mechanical systems. The impedance analogy allows us to create an equivalent electrical circuit that has the same mathematical description as the mechanical system. This provides a convenient and concise way of describing and analyzing a mechanical system using techniques from linear circuit analysis.
Figure 5-3 shows the correspondence between the mechanical quantities on the left
40
and the equivalent electrical circuit quantities on the right for the impedance analogy.
In summary, forces correspond to voltages, velocities correspond to currents, viscous dashpots correspond to resistors with impedance b, springs correspond to capacitors with impedance k, where s is the Laplace complex frequency variable, and masses correspond to inductors with impedance ms.
-+F--
F b
X2
F
----
=
-j'\/\v b
F+- k k
[-I
U- U-+F
&2
X m
X
F
+F-
U =
+ = ms
Figure 5-3: Impedance analogy
5.4 Single Resonator
We first look at the behavior of a single resonator decoupled from the MDA and subjected to a displacement/velocity excitation, which corresponds to a current source in the impedance analogy.
Figure 5-4(a) shows a single resonator with mass mi subjected to a displacement excitation zo (velocity excitation uo -- zo) through coupling spring koi with intrinsic
41
damping b
0
. Mass mi is also connected through spring ki (with intrinsic damping bi) and viscous load bLi to ground.
koS
xo
U
0
U
0 i bLi
U
0
(a) Single resonator with displacement/velocity excitation
(b) Equivalent circuit
Figure 5-4: Single resonator with displacement/velocity input; equivalent circuit
Based on the equivalent circuit shown in Figure 5-4(b), we define mechanical impedances
Zoi(s)
Zi(s) mis+ i- +bi +bLi-
S
(5.1)
(5.2)
We can derive the velocity of the resonator ui = z, from a current division of no a zo and Zi as
U0
Zoi
Zoi + Zt
S mis
+ ko + bo + bi + bLi koi + bo s mis 2 + koi + ki + (boi + bi + bLi)s
42
(5.3)
(5.4)
(5.5)
where Uj and Uo are the Laplace transforms of u and uO, respectively. The transfer function Equation 5.5 has complex zeros and poles (assuming an underdamped system)
s,~
~ koi bo ±
~~ in1- ?,
(5.6)
(5.7) where we define the natural frequency wi, of the resonator as ko
2
+ ki mi and the damping ratio (j of the resonator as boi + bi + bui
2 (koi
We also define the quality factor
Qj of the resonator in Equation 5.10 as
1
Qi
= -,
(5.8)
(5.9)
(5.10)
We can write the magnitude of Equation 5.5 in terms of the poles and zeros as
Ui (S)cS
UO s-
- s
IsI|S -Sp2|
(5.11) where c is a constant. We can then obtain the magnitude of the frequency response of the system by substituting jw for s in Equation 5.11.
Ui c jo s,| jo
Spi ljo - Sp2|
(5.12)
We can get an intuitive feel for the magnitude response by interpreting each of the magnitude terms on the right hand side of Equation 5.12 as distances from a given
43
point on the jw axis to a particular pole or zero:
U(w
U
0
)
=
Uo distance from jw to sz
I I c l
-s_____ jW-S
2 ljo s,1
L~J distance from jw to spi distance from jw to sp2
.
(5.13)
As we approach a zero, the numerator will shrink and the magnitude response will become small. Conversely, as we approach a pole, the denominator will shrink and the magnitude response will become large.
Figure 5-5 shows both the pole-zero plot for the single resonator transfer function
(top) and the magnitude response of the single resonator (bottom). Note that we have rotated the conventional set of axes in the pole-zero plot so that the jw axis now extends to the right. As expected, as we approach the single pole at, here, W = 200 rad/s, the denominator of Equation 5.12 becomes small and the magnitude response becomes large.
Figure 5-6 shows how, by lowering the damping terms to raise the quality factor Qi of the resonator, we can obtain a larger magnitude response and a narrower bandwidth.
5.5 MDA with a Single Resonator
We now consider the case of a single resonator coupled to the MDA primary mass ino, which is subjected to a force input Fo, which corresponds to a voltage source in the impedance analogy.
Figure 5-7(a) shows a single resonator with mass mi connected to primary mass mo through coupling spring k
0
i with intrinsic damping b
0
i. Mass mi is also connected through spring ki (with intrinsic damping bi) and viscous load bLi to ground. Mass mo is connected to ground through spring ko with intrinsic damping be and is subjected to force excitation FO.
Based on the equivalent circuit shown in Figure 5-7(b), we define (in addition to
44
|
5
4
3
2
1
8
7
6
0
100
X poles
Q zeros
-x
I
150
Pole-zero plot for '4
U
0
I
200 t
250 300
0 j
30
25
20
Uj |O
15
10
5
00
100 150 200
W
250 300
Figure 5-5: Single resonator pole zero plot (top) and transfer function frequency response (bottom). Note: complex conjugate pole and large, negative real zero not shown
45
25-
20-
UI
15-
Pole-zero plot for 4
4
3
2F
1
0
100
8
7
6 [
5-
X poles
Q
zeros
increasing Q]
150 200
Q(s) = jW
250
(.i )
30
-
300
10-
5-
0 -
100 150 200
W
250 300
Figure 5-6: Single resonator pole zero plot (top) and transfer function frequency response (bottom). Note: complex conjugate pole and large, negative real zero not shown
46
F0 mo koi bo x
F0 o mos s bo is koi
S boi noi s i bi bui b bti
Zo
Zoi
EM
(a) Single resonator and primary oscillator with force excitation
(b) Equivalent circuit
Figure 5-7: Single resonator and primary oscillator with force excitation; equivalent circuit.
the impedances defined earlier) mechanical impedance
Zo(s) -- mos + + bo.
S
From the equivalent circuit, we can readily derive that
(5.14)
Fo0 Zoi + Zi
Ui = uo Zog
Zo + ZZ
=
Zo Zai
F
0
Z
0
+ ZoZ + Zo Z1
(5.16)
Thus, although no will have a zero from the Zoi + Zi term in the numerator of
Equation 5.15, ui has no such zero. Figure 5-8(a) for the primary oscillator shows how the pole-zero cancellation at approximately 200 rad/s leads to a relatively small magnitude response at that frequency. On the other hand, Figure 5-8(b) for the resonator shows how the absence of a zero at that frequency leads to a large response
47
from the corresponding pole.
5.6 MDA with Multiple Resonators
Figure 5-9(a) shows again our full MDA mechanical model. Figure 5-9(b) shows its equivalent circuit.
From the equivalent circuit, we derive that
F
0
Zo + (Zo| Zi) i=1
Zo
+ Zoi
(Zoi
+ Zi)
ZO
+
Z(Zoi i=1
Zi )
(5.17)
(5.18) where
Zo Zi zoizi
Zo + Zi
(5.19) and Z . We substitute 5.19 into 5.17 and 5.18 to find
F
0
F (Zg + Z ) o = D n
F
0
Zo H (Zo + Z
3 jZ1
)
F
0
Zoi n
H (Zo3 + Z3) j=1
D
< i< n
(5.21) where
D n
=Z
0
]7f(z
0
±+
Zoj Z (Zoi + ZZ) i=i
(5.22)
Equation 5.21 shows that, for each output velocity ui, there will be one frequency, corresponding to the pole nearest the zero of Zo, + Zi, at which all other velocities uj, j 5 i, have a pole-zero cancellation, but at which ui has only a pole. Thus, at that frequency, we can drive the jth resonator in relative isolation.
48
FI
7 b
|15
6
Il
4
3
2
1
X poles
0 zeros
100 200
Pole-zero plot for a
300 400
9(s)= jw ow) x
500 600 700
0 100 200 300 400 500 600 700
(a) Primary oscillator pole zero plot (top) transfer function frequency response (bottom)
Pole-zero plot for
4
3
2
6-
X poles
S0 zeros
5-
1
100
X
200 300 400 a(s) = jo
X
500 600
-
700
2
2o
1l
0 100 200 300 400 500 600 700 w
(b) Secondary resonator pole zero plot (top) transfer function frequency response (bottom)
Figure 5-8: Primary oscillator and secondary resonator pole zero plots and transfer function frequency responses for single resonator MDA
49
F4 ko
1 b01 k1 b1 i m mi k
0 2
X
1 b
0 2 koa
X
2 b
0 3 k2 b2 m2 k3 b2b3
M3
X3
* kon bon Xn
* kn bn
Mn bn
(a) Multiple resonators and primary oscillator with force excitation ko
1 ksn
I UOMIS
UZ0
U
1 k1 b1 s
Un maj"Is kn
S bn n
Zo
U
1
(b) Equivalent circuit ti
Figure 5-9: Multiple resonators and primary oscillator with force excitation; equivalent circuit.
Figure 5-10(b) shows, for a case with three output resonators, how we can drive each resonator independently at a particular frequency because of the pole-zero cancellations in the other two resonators at that frequency. This result should allow us to actuate independently multiple degrees of freedom using a single vibrating source.
50
Pole-zero plot for g
6
710
8FX
-polesl
7 0 zeros
5-
-- 4-
1
23-0 x
100 200 300 400
9(S)
=jw
500 600 7 )0
-4
7
6
15
3
2
Pole-zero plot for !& x pols
0 zeros x x
0 100 200 300 w
400 500 600 700
(a) Primary oscillator pole zero plot (top) transfer function frequency response (bottom)
-g
-4
3
2
6
5
6I
7
Pole-zero plot for a x poles
0 zeros x
x
7 b
6
5
-4
3-
2-
Pole-zero plot for A
F
X po.
0 zeros x
0
Q x
100 200 300 400 500
!a(s) = jo
600 700
I+-
100 200 300 400 500 600
!(s) = jw
-
700 100 200 300 400 500 600 700
U(s)
2.5
3
5
2
2.5
1.5
j l 2 ~F
4
1.5
2
0.5
0.5
JL-4.A
wA
'
0 100 200 300 400 500 600 700
0
0 100 200 300 400 500 600 700 0 100 200 300 400 500 600 w
(b) Secondary resonators pole zero plots (top) transfer function frequency responses (bottom)
700
Figure 5-10: Primary oscillator and secondary resonators pole zero plots and transfer function frequency responses for three resonator MDA
51
5.7 Verification: MDA 1.0
An initial prototype, shown in Figure 5-11, was designed and fabricated to test our ability to drive multiple degrees of freedom independently using a single vibrating source. The MDA 1.0 had three output DOFs, the three rotating shafts labeled as
1, 2, and 3 in the photograph at the right of the figure. All three DOFs were driven
by a single loudspeaker, whose frequency of vibration could be varied. Each DOF comprised a resonator, as previously discussed, a flexure-based linear to rotational transformer, and a one-way clutch rectifier (similar to a bicycle freewheel) that converted the oscillation of the resonator to a continuous rotation of the output shaft.
Components of one output stage:
One-way clutch rectifier
'XX
Linear to rotational transformer
.
I
Driven mass and resonator
F
#4Loudspeaker
Figure 5-11: MDA 1.0.
The output velocity frequency response of the prototype was measured. The results are shown in Figure 5-12. We see that we are able to selectively actuate individual DOFs based on the frequency of the input and, furthermore, that the predicted response based on our model closely matches, at least qualitatively, the measured response.
52
Pole-zero plot for a
Ix
30- X poles y
0 zeros
|| 20-
0g
10-
100 200 x
0. 0
300 x
400 500
Qr(s) = jw
600
0.3
10.2
0.1
0
700
100 200 300 400 500
MDA 1.0 uo measured frequency response
600 700
30
11 20
10 -
Pole-zero plot for
X poles
0 zeros
X
1.5
0 20 40 60
frequency (Hz)
80 100
(a) MDA 1.0 primary oscillator pole zero plot (top) transfer function frequency response (middle) measured uo frequency response (bottom)
100 200 300 400 500 600 700
30
1120-
Pole-zero plot for
X poles o zeros
X
10
1.5
X o
e
100 200 300 400 500 600 700
IU.) jw
30
1120
Pole-zero plot for g
X poles X
1.5
1
~ x o0 x
0
100 200 300 400 500 600 700 gauy)
= joW
0.50.5
0.5
0 --j
0 100 200 300 400 500 600 700 w
MDA 1.0 output 1 measured frequency response
300-
200
100
0
0 100 200 300 400 500 600 700
MDA 1.0 output 2 measured frequency response
300
200
100
0
0 100 200 300 400 500 600 700
MDA 1.0 output 3 measured frequency response
~300-
200
100
0 20 40 60 frequency (Hz)
60 100
01
0 20 40 60 frequency (Hz)
60 100
0,
0 20 40 60 frequency (Hz)
60 100
(b) MDA 1.0 secondary resonators pole zero plot (top) transfer function frequency response (middle) measured output speed frequency response (bottom)
Figure 5-12: MDA 1.0 primary oscillator and secondary resonators pole zero plots and transfer function frequency responses and measured output speed frequency response
53
5.8 MDA 1.0 Problems
The MDA 1.0, in addition to verifying the feasibility and modeling approach of the
MDA, also identified some problems.
First, we see in Figure 5-12 that the outputs are not completely independent. For example, at f3
~ 72 Hz, both ui and U
2 have nonzero velocities.
Another problem with the MDA 1.0 is its lack of bi-directional control, owing to its use of one-way clutches for rectification.
The MDA 1.0 also suffers from relatively poor efficiency (approximately 6% max) and output torque (approximately 0.01 Nm max).
The problems of crosstalk between outputs and lack of bi-directionality will be addressed in the design of the oscillator/rectifier output stage discussed in Chapter
6.
The problem of poor efficiency will be addressed in the design of an improved electromagnetic transducer discussed in Chapter 7.
Finally, the problem of poor output torque will be addressed in the design of a speed reduction mechanism discussed in Chapter 8.
54
Chapter 6
The MDA Rectifier
6.1 Motivation
Figure 6-1: MDA block diagram
Although the MDA 1.0 prototype validated our basic MDA mechanical model and demonstrated that we could use the MDA to actuate selectively individual degrees of freedom according to frequency, it also identified the need for a simplified rectification mechanism that 1) eliminates cross-talk between outputs and 2) achieves bi-directional control.
6.2 The Standing Wave Ultrasonic Motor
In developing an improved rectification mechanism, we took inspiration from the
Standing Wave Ultrasonic Motor (SWUM), one version of which is shown in Figure
55
6-2. The SWUM achieves rectification by generating an elliptical motion at the tip of the vibratory piece through the interaction of the tip and the rotor, which is oriented at a slight angle to the vibrator's principal direction of motion. When the vibrator makes contact with the rotor, the normal force from the rotor causes the tip to bend slightly upward. At the same time, the friction between the tip and the rotor forces the rotor to follow the tip until contact is broken. This repeats every half cycle of the vibrator's motion, causing the rotor to move continually upward.
Oscillator Vibratory piece
Rotor
Z x
Piezoelectric vibrator
(a)
(b)
Figure 6-2: Sashida's "woodpecker-type" standing wave ultrasonic motor (Uchino
[15])
6.3 The MDA Resonator/Rectifier
Figure 6-3 shows how, like the SWUM, we can drive a rotor in a continuous direction
by adding a tertiary degree of freedom (in addition to the primary transducer DOF and the secondary resonator DOF) in a direction orthogonal to the resonator DOF.
When in contact, the normal force from the rotor acts upon both the secondary and tertiary DOFs to produce an elliptical motion at the contact point.
56
1 + 2 4 3
4 5 6
7 8
Figure 6-3: The resonator/rectifier driving a rotor via an elliptical pattern of motion
6.4 Resonator/Rectifier Dynamic Model
Figure 6-4 shows the dynamic model for the resonator/rectifier. Note that there is an initial gap g between the resonator/rectifier contact point and the rotor. Thus, for amplitudes of motion below some threshold proportional to the gap g, there will be no contact between the resonator/rectifier and the rotor and, therefore, no motion of the rotor. This should help to eliminate crosstalk between outputs. Figure 6-5 shows an exploded view of the contact between the resonator/rectifier and the rotor, identifying all the relevant normal, frictional, and load forces.
57
.1/
Xk ktk, btk k k b kot
2 2 -- 2 ' mLk
ko b
Fok k j rk
We can write the equations of motion for the resonator/rectifier as
1
2= (F
kox
0
-
1
Xk = mSk + bo- ko(x
-- xk)
bok(o
k(6.1)
+ Nk) J kok(xk xO) bok(k i0)
kkxk bk-k),
(6.2) itk =
1 n (fk N)-I ktkxtk-
~ tkitki
(6.3)
Xrk = mrk
(FLk Ffk), (6.4)
58
Ff
Figure 6-5: Resonator/Rectifier contact detail (exploded view; surfaces are in contact) where we define frictional force and normal force and coordinate transformations
I
I
cos 01+ sin OJ,
S
Ffk = Ffki,
Nk NOj,
cos OI- sin 0j,
= sin 0i + cos 0,
-sin 01+ cos 0J.
(6.5)
(6.6)
(6.7)
(6.8)
(6.9)
(6.10) as
By defining composite degrees of freedom parallel and perpendicular to the rotor
XIIk = (xskI+ Xkf) -, x-k
(xsk + XkJ)
59
(6.11)
(6.12)
we can also write the equation for the normal force as
Nk = -krk(X-k + g) brk(X1k + g).
(6.13)
When the resonator/rectifier is in contact with the rotor, the contact friction will be characterized as either slipping or sticking. Figure 6-6 shows the state diagram for the contact friction. If the magnitude of the relative velocity between the contact point and the rotor is below some threshold, the motion of the two bodies can be combined into a single DOF and the resulting magnitude of the friction force between the two bodies can be computed. If the magnitude of the friction force is below the product of the normal force and the coefficient of friction, the two bodies will be considered to be sticking. If the magnitude of the friction force is greater than the maximum given by the normal force and coefficient of friction, or if the magnitude of the relative velocity is greater than the threshold, the two bodies will be considered to be slipping.
IVrel < tol
(
)
IFkI > IArkNk
Figure 6-6: Resonator/Rectifier contact stick/slip state diagram
In the case of slipping, the friction force will be given by
Ffk =IrkNk sgn(±rk lIjk).
60
(6.14)
In the case of sticking, the
Xk degree of freedom will be expressible as
irk = ilk
X rk = - Ik
(±'sk + XkJ)
-
1 rk =(-; k ± kfJ)
(6.15)
(6.16) and the equations of motion 6.1 6.4 can be solved for the unknown friction force.
6.5 Resonator/Rectifier Dynamic Simulation
Based on the preceding dynamic model, a simulation of the nonlinear resonator/rectifier dynamics was performed to demonstrate the effectiveness of the rectification mechanism and the elimination of cross-talk between outputs, as shown in Figures
6-7 and 6-8. At 142 Hz in Figure 6-7, only resonator 1 experiences a large amplitude and elliptical motion that results in rotation of rotor 1, while resonator 2 experiences comparatively small amplitude and no contact with rotor 2. At 113 Hz in Figure 6-8, the situation is reversed.
6.6 The Resonator/Rectifier Flexure
Because the displacements of the resonator/rectifier are relatively small with respect to its overall dimensions, we can use simple flexure elements as both bearings and springs in our resonator/rectifier model. Figure 6-9 shows how the flexure can drive a rotor using an elliptical motion in a manner exactly analogous to the original resonator/rectifier model.
Figure 6-10 shows how, in practice, the resonator/rectifier flexure generates an elliptical motion that drives the rotor.
6.7 A Compact, Bidirectional Resonator/Rectifier
Figure 6-11 shows how, with a symmetric configuration of flexures, we can achieve bidirectional motion of a single rotor at two distinct resonant frequencies.
61
Rotor 1I Rotor 1 zoom
0.02
0
0.022
0.02
0.018
0.016
-0.02
-0.02 0 0.02
Rotor 2
0.02
-0.02 -0.015
Rotor 2 zoom
0
0.022
0.02
0.018
0.016
-0.02
-0.02 0 0.02
-0.02
-0.015
Figure 6-7: Resonator/Rectifier dynamic simulation at 142 Hz
Rotor 1 Rotor 1 zoom
0.02
0.022
0.02
0
0.018
-0.02
-0.02 0 0.02
Rotor 2
0.016
-0.02
-0.015
Rotor 2 zoom
0.02
0
0.022
0.02
0.018
0.016
-0.02
-0.02 0 0.02
-0.02
-0.015
Figure 6-8: Resonator/Rectifier dynamic simulation at 113 Hz
62
1
3
3
4 5 6
7 8
Figure 6-9: The resonator/rectifier flexure driving a rotor via an elliptical pattern of motion
63
Figure 6-10: Elliptical motion of resonator/rectifier and output rotation of rotor frequency = f, frequency = f2
Figure 6-11: A rectifier/resonator flexure configuration for bidirectional control
Figure 6-12 shows how, furthermore, we can achieve a particularly compact bidirectional configuration by arranging some of the flexures in different planes.
64
Figure 6-12: A particularly compact rectifier/resonator flexure configuration for bidirectional control
6.8 Parallel Beam Flexure Power Transfer Capacity
We wish to estimate the maximum power that a resonating parallel beam flexure can safely transfer before yielding. This limit will be set by the product of the maximum elastic strain energy stored in the beams and the maximum resonant frequency of the flexure.
L t
Figure 6-13: A parallel beam flexure
The stiffness of a single beam in a parallel beam flexure, as shown in Figure 6-13 is given by
Ebt
(6.17)
65
The maximum deflection of the flexure before yielding is given by
6max
= I
3 E t
.
2
(6.18)
We can thus compute the maximum elastic strain energy of the parallel beam flexure as
1
U = -kmax
-
2
1 o2
1 Vol,
18 E
(6.19) where Vol is the volume of material under strain. We can maximize the maximum elastic strain energy and, thus, the maximum power transfer capacity of the flexure
by maximizing the volume of material under strain without decreasing the maximum deflection. We can easily achieve this objective by adding more legs to the parallel beam flexure, resulting in a final flexure design as shown in Figure 6-14.
Figure 6-14: Final flexure design
If we approximate the mass of the resonator as the mass of material under strain,
66
Table 6.1: Maximum power transfer density of a bending beam MDA resonator for several engineering materials, given 6max = 3 mm.
Material
ASTM A514 Steel
2014-T6 Aluminum
Acetal/Delrin@ pmax (W/kg)
33,000
145,000
244,000 we can calculate its resonant frequency as k
_
Lor =-(6.20) m k pVol and the maximum power transfer capacity of the resonator before yielding as
(.0
Pmax,transfer =
UWr
Qr r ,
(6.21) where
Qr
is a desired minimum quality factor of the resonator. We can thus derive that the maximum power transfer density will be given, for a parallel beam resonator operating at its resonant frequency, by
_
Pmax,transfer tn 54 maxr
/ y 3
,
(6.22) for maximum displacement amax, desired minimum quality factor Qr, material yield stress o-y, Young's modulus E and density p. Table 6.1 lists Pmax,transfer for several engineering materials, given a maximum displacement of 3 mm. These values are orders of magnitude greater than the power densities of typical transducers and increase with decreasing scale, as shown by the 6max term in the denominator of Equation 6.22.
Thus, we expect that small-scale resonators should be very capable of transferring as much power to a load as they are able to receive from a similar-sized transducer.
67
68
Chapter
7
The MDA Transducer
7.1 Motivation
Figure 7-1: MDA block diagram
The vibrating transducer plays an important role in determining how much output power we can obtain from the MDA. If the transducer is inefficient, it can quickly reach a thermal power limit as the amount of waste heat it can safely dissipate is exceeded for a given output power. Thus, it is important to understand what transducer parameters contribute to maximum system efficiency so that we can optimize the transducer design.
We have chosen to focus on electromagnetic transducers based on their ubiquity and the relative ease with which they lend themselves to custom fabrication.
69
7.2 Electromagnetic Transducer
We first derive a simple model of an electromagnetic transducer, based on the analysis of a moving coil transducer in [4].
The Lorentz force law gives the force F on a current-carrying conductor as
F = if x B, (7.1) where i is the current in the conductor,
I
is a vector with magnitude equal to the length of the conductor and direction parallel to the direction of flow of current through the conductor, and B is the magnetic field (here assumed uniform over the length of the conductor).
Faraday's Law of induction states that the induced electromotive force (emf) in a closed circuit is equal to the time rate of change of the magnetic flux through the circuit, or, for the current loop shown in Figure 7-2, emf = -Blu, (7.2) where u is the velocity of the current loop, and the negative sign indicates that the induced emf gives rise to a current whose magnetic field opposes the change in flux, in accordance with Lenz's law.
Equations 7.1 and 7.2, along with the resistance Re, and inductance Le of the transducer, complete our simple model of the electromagnetic transducer, as shown in Figure 7-3.
7.3 Analytical Approach
In the following sections, we model the multiple degree of freedom actuator using lumped, linear elements that yield a description of the system in terms of linear, ordinary differential equations. In the frequency domain, we thus obtain simple algebraic expressions for output power and efficiency as functions of frequency that provide
70
-B eE
ED ED ED 0D (
ED e
EDEDD
(De(
EDED
EDEDD
ED ED
ED
ED
ED
0
0
0D (
EDE(D ED 0D
00
Ee
EDE(D ED 0) )0
H-B
00(
00(
0 0
EDE(D
ill1
ED 0D G0 00(
77
2
-B eDe(
(De
EDEG
(D ED
(DED
EDEG
EE
(De
EDEG
U eD
ED 0)
00 (
00 (
ED 0D 00(
(D
0
G0
(D 0D G0
(D 0D 00( 0D 0D
+ emf
0D (
V1
0) 0D
0D 0
0D 0D
0)
0D 0D
0
Figure 7-2: Current loop showing the Lorentz force (left) caused by the current i and the motional emf (right) caused by the velocity u.
Vn jwLe
BLuO
_Vin
Figure 7-3: Electromagnetic transducer equivalent circuit.
BLuO insight into possible optimization of the various design parameters.
We begin our analysis by deriving the power output and efficiency of a simple, harmonic oscillator directly driven by an ideal force input. We then consider the losses incurred by a real electromechanical transducer. We then look at the case of an
MDA with a single resonator; we introduce a second, coupled oscillator and examine the power output attainable from this indirectly driven degree of freedom.
Throughout this analysis, we make use of the impedance analogy for mechanical systems, discussed in Chapter 5, which transforms the mechanical system to an equivalent electrical circuit and permits a concise, graphical representation of the system based on relations from steady-state, AC circuit analysis.
71
7.4
Single Oscillator with Ideal Force Input and
Viscous Load
ko bo
F0 mo x0 bLo
(a) Single harmonic oscillator j(omo ko j(A bo
Zo
F
0
U
0 bLo F
0 i'0 bL0
(b) Equivalent circuit
Figure 7-4: Damped, harmonic oscillator with viscous load and ideal force input; equivalent circuit.
Figure 7-4(a) depicts a single harmonic oscillator with ideal (zero impedance, lossless) force input F - Fo sin(wt), mass m, spring with stiffness ko and viscous damping coefficient bo and viscous load with damping coefficient bLo. We define the useful power output Pou t,o as the average, real power delivered to the dashpot bLO; we define the mechanical power loss Ploss,mech as the average, real power dissipated in the dashpot bo.
Using the impedance analogy, we draw an equivalent electrical circuit, shown in
Figure 7-4(b), for the single harmonic oscillator. We define the frequency-dependent complex impedance of the oscillator (without the load) as
Zo() = jWmo + .
+ bo = bo + j Wmo -
72
(7.3)
with magnitude and phase
Zo (cw)| bo
+ womo ko2
ZZo(w) = tan imo -
1 ,
(7.4)
(.
The velocity of the oscillator is then given as the input force divided by the total complex impedance
Fo
Zo(w) + bLO (b
0
+ bLO) -
F
0
WO -o)
(7.6) with magnitude and phase
F
0
(bo + bLo) 2 +
0io ko
(7.7)
Zuo(w) = -tan b
0 bo + bL0
(7.8) where we have expressed the input in phasor form with magnitude F
0 and zero phase.
To find the frequency at which the magnitude of the velocity is a maximum, we recognize that the denominator of Equation 7.7 will be minimized when (wno is equal to zero and conclude that the velocity will reach a maximum at the oscillator's natural frequency,
Wuo,peak
= wO, where the natural frequency is defined as
WO
= \o-
(7.9) velocity will be
for w in Equation 7.7, we find that the maximum magnitude of the
'uo(wo)| =
F
+o bo + bLO
(7.10)
The displacement can be derived by integrating the velocity, which, in the fre-
73
quency domain, is accomplished by dividing by jw, yielding to(W)
X
0(w) =
____W
Fo
(ko - w 2 mo) + jw(bo + bLo) with magnitude and phase
(7.11) xo(w)
/(ko
-
F
2 mo) + w W (bo + bL o)2
I
(7.12)
1 w(bo +
Zxo(w) -tan ko-W
2 bLo) m
I (bo + bLo)
=- tan O Win
W
7F o(w) -
-.
(7.13)
We can also find the frequency at which the magnitude of the displacement reaches a maximum, this time by taking the derivative with respect to w of Equation 7.12 and setting it equal to zero. We find that
Wxo,peak
-Wo1
-
202 (7.14)
(not to be confused with the damped natural frequency Wd= wo 1
-
() where the damping ratio (o is given by bo + bLo
2 komo
(7.15)
We can also define the quality factor of the oscillator as
1 vo+mo
Qo=200 bo +bLo
(7.16)
Substituting wxo,peak for w in Equation 7.12, we find that the maximum magnitude of the displacement will be
S
(WOxo,peak)
0
-
FO
1 2-
01-(0
Fo Fo
0 oo ko
This approximation is valid for Co < 1 (i.e., Qo > 1).
(7.17)
The output power can be computed as the product of the magnitude squared of
74
the velocity and the load
Put,o(w) =|u
0
(w) IbLo
F0bLO
(bo + bLO)
2 +
Wmo )
(7.18)
From Equation 7.18, we see that Pout,o will share the same maximum frequency wo as lu
0
| and will have a maximum value of
Pou'o
-n
F bLO )
(bo + bLO)
(7.19)
Likewise, the mechanical power loss can be computed as the product of the magnitude squared of the velocity and the viscous loss
Poss,mech () 0
(W
2 bo
F2b
0
(bo + bLO) 2 + (wiM0 k)2
(7.20)
By conservation of energy, we can calculate the total input power as the sum of all the power dissipations in the system
Pin(w) = Pout,o(J) + Ploss,mech(W) =U
0
2
(b +
Lo ) =
F02(bo + bLO)
(bo + bLO) 2 + (wM0 k2
(7.21)
Finally, we define the efficiency as the fraction of useful output power compared to the total input power which, in this case, reduces to the frequency-independent relation
Pout,0(w)
Pin(W) bLO 1 bo + bLO 1 bo bLO
(7.22)
7.5 Oscillator with Lossy Electromagnetic Transducer and Viscous Load
We now consider the effect on the harmonic oscillator of replacing the ideal force source with a lossy electromagnetic transducer, as shown in Figure 7-5(a).
75
Vn
0c%.
jwLe
R, ko
2
>BLuo bo
2 tra
EM nsducer ko bo
2 2 Jo
Fo mO bLo
Vin BLuO
(a) Single harmonic oscillator with electromagnetic (b) Equivalent circuit for EM transtransducer ducer jWmo jW bo
BLi U bjo BLi bLo
(c) Equivalent circuit for single oscillator (mechanical side)
Figure 7-5: Damped, harmonic oscillator with viscous load and lossy electromagnetic transducer; equivalent circuit.
The equivalent circuit for the electromagnetic transducer is shown in Figure 7-
5(b). From it, we, we can readily derive the input current as
.
n - BLuO Vin BLuO
Re + jwLe Ze
(7.23)
The dependent voltage source BLuO represents the back emf of the electromagnetic transducer, where BL is the transducer's output force per unit input current.
Because the mechanical side of the system has stayed the same with our introduction of the lossy electromagnetic transducer, our expressions for uo, £o, and Pout,o stay the same as in our previous analysis, except that we now substitute BLi for FO.
From our lossy electromagnetic transducer, however, we gain an additional power
76
dissipation term owing to the losses in the electrical resistance Re
(7.24)
Pioss,elec(W) = I 2 Re.
The input power now includes this additional term and is given by
Pin(w) Pout,o () + Ploss,mech (W) + Ploss,elec(W) =
(BL) 2
1j 2
(bo + bLO k)2
W +||R (b
0
+ bLO)
2
+ (wiMo
-
(BL) 2 (b
0
+ bLO) +
Re
+ bLO)
2
(
(b
0
+ bLO)
2 + (om O ko
+ (WiO
(b
0
0 2
(bo + bLo) + 2 Re
)2)
2.
(7.25) such that the efficiency-now a function of frequency-is
Pout,O(w)
Pin (W)
(BL) 2 bLO
(BL)
2
(bo + bLO) + Re ((bo + bLo)
2
+ b o
1
(bo+bLO)2+ (wmo
)2) bTbLO
-
)2) where we define the equivalent damping coefficient of the transducer bT as bf Re
2
(7.26)
(7.27) which has units of damping. From Equation 7.26, it has been shown [16] that the efficiency can be maximized with respect to frequency by operating the transducer at the system's natural frequency
71
0
(bLO) = (wo; bLO)
= b0 bLO
1
(b0+bLO)
2 bTbLO
(7.28)
By differentiating 7.28 with respect to the load bLO and setting it equal to zero, we
77
Table 7.1: Maximum efficiency ro for three values of o-o.
F7 maxT7o
3 0.5
7 0.75
19 0.9
find that the load that maximizes the efficiency at the natural frequency is b*O boo, (7.29) where o is defined as o-
=T
Finally, 7.29 can be substituted into 7.28 to find
(7.30) max o(w; bLo) = qo(wo; b
0
)
1
1 + bo + (bo+bto)2 b3O bTbLO o-o -
O-o +1
(7.31)
Thus the maximum achievable efficiency for the single oscillator driven by an electromagnetic transducer is shown by [16] to depend solely on o, which is a function of only the transducer equivalent damping bT and mechanical damping bo.
Figure 7.5 shows a plot of maximum efficiency as a function of o-o. The red, dotted lines highlight three particular values, listed in Table 7.1.
We can also derive the ratio of the output power to the total power losses as the simple linear relation
Pout,o __ o 1
Pioss,total
2 where Pioss,totai = Pioss,eiec + Plossmech. In some cases, this performance metric is more meaningful, for example, by giving a direct indication of how much output power can be produced for a given maximum allowable heat dissipation.
78
1 max 77o vs
0
2 4 6 8 10 12 14 16 18
UO
20
Figure 7-6: Maximum efficiency 77o as a function of oo.
7.6 Efficiency of Single-Resonator MDA
We now consider the efficiency of the MDA having a single output resonator, as shown in Figure 7-7(a).
From the equivalent circuit of Figure 7-7(c), we define the following new mechanical impedances:
Zoi(w) kow + bi boi j
Zi(W) - jWmi + +1- bbLl +j (wi
(7.33)
(7.34)
Notice that the bLl term is, unlike the single oscillator case, included in Z
1
. We derive the velocities uo, uoi, and ui in terms of the input current and the mechanical
79
in ko bo
2 j 2
EM transducer
F
0 mo ko1 bo1 x1 n
1 ko bo
2 1 2 Xo0 jwLe
>BLuO
k TbL
/
Vn BLuO
(a) Primary and secondary oscillators with lossy (b) Equivalent circuit for EM trans-
EM transducer and viscous load ducer m0 ko jW
UO b
0 bU jw
11
0 1
U
1 b,
1
BLii
U01
BLi
(c) Equivalent circuit for double oscillator (mechanical side)
Figure 7-7: Primary and secondary oscillators with lossy electromagnetic transducer driving primary and viscous load on secondary.
80
impedances as
Uo
=
U0
1
=
BLi(Zo1 + Z
1
) zozo
1
+ zozi + zo1zi
BLi Z
1
ZoZo
1
+ ZoZ
1
+ Zo
1
Z
1
BLiZo
1 zozo
1
+ zozi + ZoiZ1
We also define the following power terms:
(7.35)
(7.36)
(7.37)
Pelec i
2 Re
Pbo UO 2 bo
Pbol
= i 2 bi
Pout,1'
=|1 2 bL1 where Pelec, Pbo, Pbol, Pbl, and Pout,1 are the powers dissipated in the resistor Re and viscous dampers bo, boi, bi, and bL1, respectively. The efficiency for the MDA with one output resonator is given by q1(w) -
Pout'
Pelec + PbO + Pbol + Pi
+ Pout,1 or, equivalently, by substituting Equations 7.35 7.37 into Equation 7.43,
(7.43)
1(W) = 1 b1 |Z
1
|2 bo
1 bLI
Z
2
1 bLi
|Zo1 Z12
+ -Z2
L bo
+
ZoZo
1
+ zozi + ZoiZi
Z
2
1
L1T
2)
(7.44)
Note that we have not shown explicitly the impedances' dependence on W, but it is implied. The last term in the denominator represents the resistive losses and will tend to dominate. We find that the resistive losses will have two local minima at the
(7.38)
(7.39)
(7.40)
(7.41)
(7.42)
81
natural frequencies of the mechanical system, given by ([5]):
(ljow, W1,high)2
001
2 012
~~12~~ where we define
0 1
1+Mom w 1
2~±.(2___
011
_ 01
1
(7.45)
001 -
WO n mo k, k
(7.46)
(7.47)
We will define the driving frequency wi for this resonator to be the natural frequency closest to wonl, at which we can achieve the greatest output and efficiency.
If we vary the mass mi and leave the rest of the system constant, we can change the natural frequencies of the system and thus change the driving frequency Wi or
"tuning" for the resonator. Additionally, we can vary the load bLi and find an optimal load b*
1
(wi) that is a function of the driving frequency. Figure 7-8 shows the efficiency as a function of driving frequency wi for optimal load b(
1
(wi) for a representative set of parameters. The curve displays a characteristic low frequency asymptote, a peak as wi approaches woo
1
, and a sharp roll-off at high frequencies. The gap around wooi exists because the term under the square root in Equation 7.45 cannot be zero for koi
#
0.
In order to maximize efficiency, we will be most interested in driving the MDA in the frequency range between 0 and wool. We thus seek an analytical solution for the maximum efficiency at the limit as wi approaches 0 (the green square in Figure 7-8) and at the peak as w
1 approaches wooi (the green circle in Figure 7-8).
7.6.1 Efficiency of Single-Resonator MDA at Low Frequencies
To find the single-resonator MDA efficiency at low frequencies (the green square in
Figure 7-8), we first take the limit of Equation 7.44 as mi approaches infinity (and
82
Maximum efficiency il as a function of driving frequency wo for optimal load bLl
(o1)
1 1 1 1 11 n
0'
0 0.5 1
Wl
Wool
1.5
2
Figure 7-8: Maximum efficiency r/ as a function of driving frequency wi for optimal load b*
1
(wi) (Frequency normalized with respect to wooi). thus the driving frequency wi approaches zero) to find r/1,low lim r/
Wi -+O
1
(wi; bL1) where we define
It
(
1
2 beff bL1
L
2
)2beff
bL1
A
2 bT
-1
(7.48) ko+ ko + koi
_ kol2
beff - bo + (I -2
1 b boi + ft
2,
(7.49)
(7.50) where t is strictly less than or equal to 1 and beff is an effective damping coefficient at low frequencies. We differentiate Equation 7.48 with respect to bL1 and set it equal
83
to zero to find the optimal load bLI at low frequencies b*1,=p 2 beff 1 bT PU2 beff low,
+ eff
(7.51) where we define glow 1 + ,
V eff
(7.52)
We substitute Equation 7.51 into Equation 7.48 to find the maximum efficiency of the single-resonator MDA at low frequencies as
71,1 = glow +1
1 (7.53)
Note that Equation 7.53 has the same form as Equation 7.31 and thus we can determine yljow as a function of aio, in the same way as in the single oscillator case from Figure 7-6.
7.6.2 Efficiency of Single-Resonator MDA at Peak
(wi
-±
wooi)
We also wish to find an expression for the single-resonator MDA efficiency at its peak as wi approaches wooi (the green circle in Figure 7-8). The problem can be made more tractable if we approximate the peak efficiency as that achieved at wooi when
won = wooi (i.e., when mi = mk+ki)).
Note that, as discussed earlier with respect to Figure 7-8, the driving frequency wi will never actually reach wooi, based on our definition of wi as one root of Equation 7.45, but the result obtained at wool should be a good approximation for efficiencies near the peak.
We first substitute w = wooi and mi = " exact expression for
71i,peak into Equation 7.44 to find an
771,peak
771 G001)
(Recall that wooi is held constant, but we can vary wonl based on our choice of mi.)
We then differentiate that expression with respect to bLl and set it equal to zero to
84
find the optimal load at the peak, given by
=
(b-2+ Ebb)
2
+ bT(bol + b
1
)(b2 + Ebb) + 4b
2 1 b
(b+ ± b
01
)(b b bT)
(
(7.55) where we define bR k
1o and Ebb b
-ko+kol
0 0 1
+ b
0 b
1
I b
0 1 b
1
.
We then substitute
Equation 7.55 into our expression for 1
71,peak
(Equation 7.54) to find
+
01 bR
2
2(+2-
+1
1
++
7/1,peak
(bo + boz)Ebb bTb + bo + b
0 1 bT
(bo + bo1)(bo + bo1 + bT) Ebb(Ebb + bT(b1 b 1)) bTbR bTb3 +T2R
Ebb b
1
+4- bT bR
b
1
+ b
0
1 bR
+ bp bT
Ebb
2
Neglecting higher order terms, this can be approximated as
(7.56)
1,peak
(peak
1
0peak +
1
(7.57) where we define bT
6 T peak
1 bo
(7.58)
Note that Equation 7.57 has the same form as Equation 7.31 and thus we can determine r1,peak as a function of speak in the same way as in the single oscillator case from Figure 7-6.
7.7 MDA Efficiency Summary
We wish to operate the MDA efficiently over a wide range of frequencies so that we can actuate multiple DOFs at multiple driving frequencies. To accomplish this, we need 1) a large bandwidth, 2) a large peak efficiency h,peak, and 3) a large low-end efficiency 971,1ow. From our analysis, we see that this is equivalent to 1) a large woo1,
2) a large owo, and 3) a large
6peak.
From Equations 7.49, 7.50, 7.52, and 7.58, we conclude that we need the following characteristics to achieve both high efficiency and high bandwidth:
9 high k
01
,
85
e low bo, boi, and bi,
* high bT, and
" low MO.
The first item, high k
0i, has already been addressed in Chapter 5, where we designed the resonator for high stiffness (for a given maximum deflection) with the objective of maximizing power transfer capacity.
The second item, low damping of the transducer suspension and the resonator, will be determined largely by our choice of materials for both. In general, the stiffer the material, the lower the loss coefficient (analogous to the viscous damping coefficient) will be, as shown in Figure 7-9.
10
1
II
Neoprene
ElastomerLoss
Butyl rubber Sihcone eastoeers qE=0.04GPa
Polyurethane
.; iA **II-e coe
1071
0
Q
8
10-2
S
10-4
104
1
Young's modulus E (GPa)
Figure 7-9: Loss coefficient versus Young's modulus (Ashby [3])
The final two items, high bT and low me, will be determined by the design of the electromagnetic transducer.
86
7.8 Design of a High bT, Low m
0
Moving Magnet
Transducer
We recall from Equation 7.27 that b_ = , where B is the strength of the magnetic field, L is the length of coil in the magnetic field, and Re is the resistance of the coil.
For a well-designed permanent magnet magnetic circuit, the magnetic field strength
B is usually between 0.5 to 1 Tesla and is limited by the remanence of the permanent magnet (typically 1 1.3 T for a NdFeB magnet).
Figure 7-10 shows a section of coil partitioned into wires of cross-sectional area A.
The total length L of the conductor in the coil can be calculated in Equation 7.59 as
Figure 7-10: Coil partitioning
V (7.59) where Vcoi is the total volume of the coil. The resistance Re of the coil is then given by
Re
-
PeL
_
PeVcoii
A A
2 (
(7.60) where pe is the resistivity of the coil material. Substituting Equations 7.59 and 7.60 into Equation 7.27, we can thus calculate the bT for the coil, given magnetic field strength B, as bT
=
B 2 yecOI. (7.61)
87
Thus, bT for the transducer is directly proportional to the coil volume and independent of the partitioning (determined by the wire diameter) of the coil. This result indicates a problem for using moving coil transducers for the MDA. We cannot independently increase bT and decrease the moving mass of the coil mo because the two are linearly related through the coil volume.
If we keep the coil stationary by using a moving magnet transducer, we can remove the interdependence between coil volume and moving mass and, thus, achieve both high bT and low mo independently. Moczala [6] shows that, for a moving magnet transducer, we can derive the force on the magnet in a similar fashion to Equation
7.1 for the moving coil, except that the total coil length L is replaced with Nw, the product of the total number of turns N = L of the coil and the dimension w of the magnet measured perpendicular to its direction of motion. Thus, for the moving magnet transducer, we can derive bT as bT = B.'W 2
Pe
Aco
Leo
11
(7.62)
Note that, for the moving magnet transducer, increasing the coil volume through
Acoil will still increase bT, but increasing the coil volume through Lcoil will actually decrease bT (by increasing Re) because only Aconl affects the total number of turns N.
7.9 A Prototype Moving Magnet Transducer
A moving magnet transducer prototype was designed and built. The prototype comprised a 9 gram NdFeB hard disk drive magnet (Figure 7-11), a silicon steel tapewound transformer core that was custom machined to achieve the correct air gap dimension, and approximately 700 turns of 22 AWG magnet wire (7-12). The completed assembly is shown in Figure 7-13.
The force constant BL and resistance Re of the moving magnet prototype were measured and used to calculate the bT of the transducer. Table 7.2 shows a comparison between the moving mass and bT of the original MDA 1.0 moving coil transducer
88
Figure 7-11: Hard disk drive magnet (mass
= 9 g)
Figure 7-12: 22 AWG coil and tape-wound core and the newly fabricated moving magnet prototype. The moving magnet transducer has approximately one-third the moving mass and approximately eight times the bT, thanks to its large (but stationary) coil.
A simulation was performed to compare the theoretical performance of the MDA
1.0 with its original moving coil and with the newly fabricated moving magnet pro-
89
Figure 7-13: The finished moving magnet transducer prototype
Table 7.2: Comparison of MDA 1.0 moving coil transducer and moving magnet prototype bT mo (g)
(Ns/m)
MDA 1.0 moving coil moving magnet prototype
26
6
9
50 totype. As seen in Figure 7-14, the substitution of the moving magnet transducer resulted in a nearly 250% efficiency increase over the full bandwidth. The performance could be improved even further with, for example, a higher koi of the resonator.
90
Maximum efficiency
1 as a function of driving frequency (o for optimal load bL (CO)
1
0.9
-
-- moving magnet
--- MDA1 .0 moving coil-
0.8
0.7
0.6
_j
0.5
0.4
0.3
0.2
0.1
0
0 0.5
1
(Am1
4,-
4.-
1.5
2
Figure 7-14: Efficiency comparison between MDA 1.0 with moving coil and with moving magnet prototype (simulated)
91
92
Chapter 8
The MDA Speed Reducer
8.1 Motivation
Figure 8-1: MDA block diagram
The MDA with an electromagnetic transducer is most efficient when moving relatively light loads at high speed. Because most motion control tasks require moving relatively heavy loads at low speed, we wish to use a speed-reducer mechanism to achieve high efficiency under normal conditions.
8.2 A Planetary Gear Reducer
Typical speed reducers rely on large size ratios between small input gears and large output gears to achieve large speed reduction (and torque gain) ratios. Because there is typically a minimum size of input gear that can still transmit the required power
93
without breaking, gear reducers with high reduction ratios tend either to be large in area or to require multiple stages, like the four-stage planetary gearbox shown in
Figure 8-2.
Figure 8-2: Tamiya planetary gearbox ([14])
Figure 8-3 shows a single stage of the planetary gearbox of Figure 8-2. The maximum reduction ratio for this planetary gear set can be obtained with the central sun gear as the input, the outer ring gear held stationary, and the triangular planet carrier as the output. In that case, the reduction ratio is given by
W.
"_ =
Wout
No
0
Ni
(8.1) where No is the number of teeth on the outer ring gear and Ni is the number of teeth on the inner sun gear. The maximum reduction ratio (shown here as 5:1) is thus limited by both the maximum size of the assembly (through No) and the minimum size of the input gear (through Ni).
8.3 A Hypocycloid Speed Reducer
A hypocycloid speed reducer consists of an inner gear forced by an eccentric input bearing to roll inside a slightly larger outer ring ([17]). The small difference in circumference between the inner gear and outer ring causes the inner gear to rotate
94
5:1
48T
Figure 8-3: 5:1 single stage planetary gear set slightly backward with respect to the fixed outer ring for every full revolution of the input, as illustrated for a 10:1 reduction ratio in Figure 8-4. The reduction ratio for a hypocycloid speed reducer is given by
-
Wout
-
N
No
-
Ni
(8.2) where N is the number of teeth on the outer ring gear and Ni is the number of teeth on the inner gear. Often, the number of teeth will be chosen to differ only by one tooth and then the reduction ratio will be given simply by the number of teeth on the inner gear. Thus, unlike the planetary gear set, the inner gear can be made large while still achieving a high reduction ratio. Figure 8-5 shows a hypocycloid speed reducer with a 50:1 speed reduction ratio that has only three more teeth on the outer ring gear than the 5:1 planetary gear set shown in Figure 8-3. Thus, given roughly the same tooth size and the same outer dimensions, the hypocycloid speed reducer achieves a speed reduction ratio 10 times greater than the planetary gear set.
95
00 input
00
output
0
90 input
-90
output
output
180* input
-18* output
2700 input
-270
output
3600 input
-360
output
Figure 8-4: 10:1 hypocycloid speed reducer
96
50:1
51 T
50T
Figure 8-5: 50:1 hypocycloid speed reducer
8.4 Conventional Hypocycloid Speed Reducer Drawbacks
Although the hypocycloid speed reducer is attractive for achieving very high reduction ratios in a small package, it suffers from a number of potential drawbacks.
First, because the eccentric motion of the inner gear causes it to undergo a translation, as well as a rotation, conventional hypocycloid speed reducers require a set of precision rollers (the purple pins in Figure 8-6) to couple the eccentric rotation of the inner gear (the yellow disc in Figure 8-6) to the output shaft. This introduces complexity and backlash into the system.
Second, conventional hypocycloid speed reducers usually extend the bearing structure of the actuator assembly, resulting in a relatively long full structure. For example, in Figure 8-6, it can be seen how two separate sets of bearings would be needed for the input and output shafts. This is not particular to hypocycloid speed reducers, but is common among all modular speed reducers with collinear input and output shafts.
97
Input shaft
Eccentrically mounted bearing
Cycloidal
disc
Ring pins
(part of chassis)
Output rollers and shaft
Figure 8-6: Exploded view of a conventional hypocycloid speed reducer ([17])
8.5 MDA Hypocycloid Speed Reducer Improvements
First, we can improve upon the conventional hypocycloid speed reducer design by replacing the set of precision rollers with a simple flexure that can accommodate the relative translation between the inner gear and the output shaft but that is torsionally stiff to transmit torque, as shown in Figure 8-7. The center piece is rigidly coupled to the shaft and flexibly coupled to the inner gear through a series configuration of two, orthogonal double beam flexures.
Second, we can achieve a very compact bearing structure by integrating the hypocycloid speed reducer with the MDA, as shown in Figure 8-8. We support the output shaft with bearings at both ends of the structure, but leave the MDA rotor
(that serves as the input to the speed reducer) free to spin on the output shaft. This
98
Figure 8-7: Two DOF flexure flexibly couples inner gear to output shaft configuration is possible because the MDA rotor is driven from its outer rim, and, thus, the input to the speed reducer is not collinear with the output shaft.
Figure 8-8: Doubly supported speed reducer output shaft and freely spinning input rotor
With these two improvements, we can achieve a very compact high-ratio speed reducer with reduced mechanical complexity and backlash.
99
100
Chapter 9
Conclusions and Future Work
9.1 Conclusions
A Multiple Degree of Freedom Actuator (MDA) was designed and fabricated comprising an efficient, low moving mass electromagnetic transducer, a simple and effective resonator/rectifier, and a compact hypocycloid speed reducer. The MDA demonstrated independent control of multiple, bi-directional outputs without crosstalk using a single vibrating transducer.
multi-frequency electrical input tr C r multi-frequency mechanical vibration r r single-frequency mechanical vibration single-frequency mechanical vibration er high-speed, low-torque continuous motion smotion low-speed, high-torque continuous
Figure ,9-1: MDA block diagram
The MDA represents a completely new approach to multiple degree of freedom actuation that overcomes many of the limitations of the prior art. It seems likely that the MDA can be used to reduce the cost and weight of conventional systems by replacing multiple expensive and heavy actuators with inexpensive and lightweight resonator stages.
101
9.2 Future Work
The following is a brief summary of possible future work related to the Multiple
Degree of Freedom Actuator.
First, the MDA should be tested in a variety of contexts and real-world applications. Future projects could include an MDA 7-DOF robot arm, an MDA 5-axis
CNC motion control system, and an MDA 4-wheel-drive mobile robot. Only once the MDA has been tested in practice will we be able to more fully understand its capabilities and limitations.
Second, different transduction mechanisms, such as piezoelectric and electrostatic transduction, and different materials, such as aluminum and steel, could offer performance benefits that should be thoroughly investigated.
Third, the MDA shows considerable promise as a means of achieving unprecedented multiple DOF actuation on a micro scale and so should be adapted for use in that context.
102
Appendix A
Selected Matlab programs
A.1 Matlab program for generating pole-zero plots and frequency
response of MDA with ideal
force source
clear all close all
%parameter values mOval = 1 Oe-3; %kg k0_val = 2e3; %N/m bOval = .05; %N*s/m
%{
MDA1.0 values mOval = 10e-3; k0_val = 2e3; %N/m bOval = 0.1;
103
X}-
%outputs num-outputs = 3;
%mks = 10e-3*ones(1,num-outputs); %kg mks = [10e-3; 20e-3; 40e-3]; kOks = 200*ones(1,num-outputs); %N/m bOks = 0.02*ones(1,num-outputs); %N*s/m %.04 total?
%kks = [200, 800, 16001; XN/m kks = 1600*ones(1,num-outputs); bks = bOks;
X{
MDA1.0 values mks = 7.5e-3*ones(1,numoutputs); %kg kOks = 222.2*ones(1,num-outputs); %N/m bOks = 0.02*ones(1,numoutputs); %N*s/m %.04 total?
kks = [384.6, 769.2, 1538.5]; %N/m bks = bOks;
}
%loads bLks = zeros(1,numoutputs); colors = ['b','r','g']; syms FO s mO kO bO kOk bOk mk kk bk bLk real %real variables syms den uO u01 ul Pout PbOl Pbl PbO eff
%impedances
ZO = sym('s*mO+bO+kO/s'); for k = 1:numoutputs
ZOks(k) = sym('kOk/s+bOk');
104
Zks(k) = sym('s*mk+bk+bLk+kk/s'); end
ZO = subs(ZO,[mO kO bOl,[mOval kOval b0_val]); for k = 1:num-outputs
ZOks(k) = subs(ZOks(k),[mO kO bO kOk bOk mk kk bk bLkl,...
[mOval kOval bOval kOks(k) bOks(k) mks(k) kks(k) bks(k) bLks(k)]);
Zks(k) = subs(Zks(k),[mO kO bO kOk bOk mk kk bk bLkl,...
[mOval kOval bOval kOks(k) bOks(k) mks(k) kks(k) bks(k) bLks(k)]); end
%velocity transfer functions
ZOks-plusZks = ZOks+Zks; prodZOks-plusZks = prod(ZOks-plusZks); for k = 1:numoutputs prodZOks-plusZksexcept-k(k) = prod([ZOks-plusZks(1:k-1),...
ZOks-plusZks(k+1:num.outputs)]); end
Xfind
poles
D = ZO*prodZOksplusZks+sum(ZOks.*Zks.*prodZOks-plusZks-except-k);
D = collect(D,s);
[D_num,D_den] = numden(D);
D_num-poly = sym2poly(D-num);
D_numroots = roots(D-num-poly);
%find zeros of uO uOoverFO = prodZ~ks-plusZks/D; uOoverFO = collect(uOoverFQs);
[uQover_FOnum,uover_F0_den] = numden(uOoverFO); uOover_FOnumnpoly = sym2poly(uOoverF0_num); uOoverFOnumroots = roots(u0_overEFnum-poly);
105
%find zeros of uks uksoverFO = ZOks.*prodZOks-plusZksexcept-k/D; uksoverFO = collect(uksover_FQ,s);
[uks-overFOnum,uksoverFOden] = numden(uks-overFO); for k = 1:numoutputs uks-overFOnum-poly = sym2poly(uks-overF0_num(k)); uksoverFQnumroots(:,k) = roots(uksoverFQnum-poly); end wmax = 700; w = 1:1:wmax; uks = zeros(num-outputs,length(w));
%compute output velocities as function of w uQ = abs(subs(uQoverF0,s,li*w)); for k = 1:num-outputs uks(k,:) = abs(subs(uksoverF0(1,k),s,li*w)); end fontsize = 14; scrsz = get(0,'ScreenSize'); figure(1), cif
%set(1,'Position',[scrsz(3)*1/3 scrsz(4)/16 scrsz(3)*1/3 scrsz(4)*17/201); set(1,'Position',[scrsz(3)*1/4 scrsz(4)/16 scrsz(3)*1/2 scrsz(4)*17/20]);
%plot uO figure(1), clf subplot(2,1,1) plot(imag(D-num-roots),-real(D-num-roots),'kx','markersize',10,'linewidth',2)
106
%plot(uks-overFOnumroots(:,k),'bo')
%don't plot large, negative, real zero
%plot([uks-over_FOnumroots(1,k);uks-overFOnumnroots(3:end,k)],'ko')
%plot zeros hold on plot(imag(uOoverFOnumroots),-real(uOoverFOnumroots),'ko',....
'markersize',10,'linewidth',2) axis([O wmax 0 81) legend('poles','zeros','location','northwest') xlabel('$\Im(s) = j
\omega$','interpreter','latex','fontsize',fontsize) ylabel('$-\Re(s) = -\sigma$','interpreter','latex','fontsize',fontsize) title(['$\textrm{Pole-zero plot for } \frac{u_{O}}{FO}$1'],'interpreter',...
'latex','fontsize',fontsize) subplot(2,1,2) plot(w,uO,'k','linewidth',2) xlabel('$\omega$','interpreter','latex','fontsize' ,fontsize)
Xylabel(['$u_{',num2str(k),'}$'],'interpreter','latex','fontsize',fontsize)
'fontsize',fontsize)
%rotate ylabel to horizontal set(get(gca,'YLabel'),'Rotation',0.0)
%shift to the left ylabh = get(gca,'YLabel'); set(ylabh,'Position',get(ylabh,'Position') [20 0 0]) axis([0 wmax 0 max(uO)]) title(['$\leftl{\frac{u_{O}}{F_0}}\rightl\scriptstyle{(j\omega)}$'],...
'interpreter','latex','fontsize',fontsize)
107
Xplot
outputs figure(2), clf
%set left edge 0 screenwidth, top edge 1/8 screenheight, width 1x
%screenwidth, height 3/4 screenheight
%for multiple output: set(2,'Position',[scrsz(3)*O scrsz(4)/16 scrsz(3)*1 scrsz(4)*17/20]);
%for single output:
%set(2,'Position',[scrsz(3)*1/4 scrsz(4)/16 scrsz(3)*1/2 scrsz(4)*17/20]); for k = 1:num-outputs subplot(2,num-outputs,k)
%plot poles plot(imag(D-numroots),-real(D-num-roots),[colors(k),'x'],'markersize',...
10,'linewidth',2)
%plot(uks-overFnumroots(:,k),'bo')
%don't plot large, negative, real zero
Xplot([uks-overFOnum_roots(1,k);uks-overFQnumroots(3:end,k)],'ko')
%plot zeros hold on plot(imag([uks-over_FOnumroots(1,k);uks-overFnumroots(3:end,k)]),...
-real([uks-over-F0_numroots(l,k);uks-overFQnumroots(3:end,k)]),...
[colors(k),'o'],'markersize',10,'linewidth',2) axis([Q wmax 0 8]) legend('poles','zeros','location','northwest') xlabel('$\Im(s) = j
\omega$' ,'interpreter', 'latex', 'fontsize' ,fontsize) ylabel('$-\Re(s) = -\sigma$','interpreter','latex','fontsize',fontsize) title(['$\textrm{Pole-zero plot for
}
\frac{u_{',num2str(k),'}}{F_0}$'],...
'interpreter','latex','fontsize',fontsize) subplot(2,numnoutputs,num-outputs+k)
108
plot(w,uks(k,:),colors(k),'linewidth',2) end xlabel('$\omega$','interpreter','latex','fontsize',fontsize)
%ylabel(['$u_{',num2str(k),'}$'],'interpreter','latex','fontsize',fontsize) ylabel(['$\leftI{\frac{u_{',num2str(k),'}}{F_0}}\right|$'],...
'interpreter','latex','fontsize',fontsize)
%rotate ylabel to horizontal set(get(gca,'YLabel'),'Rotation',0.0)
%shift to the left ylabh = get(gca,'YLabel'); set(ylabh,'Position',get(ylabh,'Position') [20 0 01) axis([0 wmax 0 max(uks(k,:))]) title(['$\leftl{\frac{u_{',num2str(k),...
'}}{F_0}}\rightl\scriptstyle{(j\omega)}$'],...
'interpreter','latex','fontsize',fontsize)
A.2 Matlab function for loading parameter structure for use with nonlinear dynamic simulation
function par = loadparam-clean(Vmax, f)
Re = 6.5;
Le = 2.3e-3;
BL = 14.6; %N/A mO = 93.9e-3; %kg
109
%kO = 3790; %N/m kO = 11625; %N/m bO = 7; %N*s/m num-outputs = 2; kOks = 3000*ones(num-outputs,1); %N/m
X/mks
= lOe-3*ones(num-outputs,1); %kg mks = (logspace(-2.2,-2,numoutputs))';
%kks = 3000*ones(num-outputs,1);
XN/m
kks = kOks; bOks = 0.1*ones(num-outputs,1); %N*s/m bks = bOks; ktks = 3e3*ones(num-outputs,1); ktks = 1e3*ones(num-outputs,1); mtks = mks.*ktks./(kks+koks-ktks); %tune to same natural frequency btks = 0.1*ones(num-outputs,1); %auxiliary DOF
Ir = 6e-7; %rotor inertias
%Ir = le-8; kr = 1e4; %rotor br = 1; rr = 0.0254; %rotor radius mr = Ir/rr^2;
FLks = 0*ones(numnoutputs,1); %0.1%load forces gs = le-3*ones(num-outputs,1); %contact gaps mur = 1; %friction coefficient of rotor thetar = 45*pi/180;
110
par.Vmax = Vmax; par.f = f; par.Re = Re; par.Le = Le; par.BL = BL; par.mO = mO; par.kO = kG; par.bO = bO; par.kOks = kOks; par.bOks = bOks; par.mks = mks; par.kks = kks; par.bks = bks; par.mtks = mtks; par.ktks = ktks; par.btks = btks; par.Ir = Ir; par.kr = kr; par.br = br; par.rr = rr; par.mr = mr; par.FLks = FLks; par.gs = gs; par.thetar = thetar; par.mur = mur; par.numoutputs = num-outputs;
A.3 Matlab program for deriving efficiency of MDA with single resonator as a function of tuning
clear all
%close all tic
XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
%set up parameters
Vin = 10; numt = 1;
Xnumber
of transducers
111
%electromagnetic transducer
%moving coil r_out = .25*0.0254; %m radius of transmission
Re = 8*numt;
Le = 0;
BL = .14/r-out*numt;
%moving magnet
%{
Re = 3.2*numt; %moving magnet
Le = 121e-3; %moving magnet
BL = .298/r-out*numt;
Xmoving
magnet
%} bT = BL^2/Re;
%prime mover
10 = 5e-6; %kg*m^2
XIO = 3e-6;
%10 = 2e-6;
%I0 = le-6; mO = IO/rout^2*numt; %kg kOrot = 1.85; %N*m/rad kO = k0_rot/r-out^2*numt; %N/m bO = 6; %N*s/m bOrot = 10; bO = .5;
%bO = b0_rot/r-out^2 wO = sqrt(kO/mO);
112
fO = w0/(2*pi); zeta0 = b0/(2*sqrt(k0*m0));
%outputs kOl = 3*.9e3; bOl = 0.01; k1 = kOl;
%kl = 0; b1 = bOl;
%bl = 0;
X/{ f= linspace(50,300,10000); f = logspace(-3,2.75,10000); f = logspace(-3,loglO(250),30000); w = 2*pi*f;
} mistar = mO*(kOl+kl)/(kO+kO1); ml = logspace(loglO(mlstar)-.6,loglO(mlstar)+3,60);
%ml = linspace(mlstar,mlstar*100,40); b = -((kOl+kl)./ml+(kOl+kO)/mO); c =.(kO*kOl+kO*kl+kOl*kl)./(mO*ml); sign = 2*(ml<mlstar)-1; fO_01_1 = sqrt((-b+sign.*sqrt(b.^2-4*c))/2)/(2*pi); f = fO_01_1;
%to get efficiency peak between uO peaks: m1below = ml<mlstar; firstmibelow = ml(find(mlbelow,1,'last')); firstmlabove = ml(find(~mlbelow,1,'first'));
113
miinsert = logspace(loglO(firstmlbelow),loglO(firstmlabove),10); finsert = sqrt((kOl+kl)./mlinsert)/(2*pi);
%ml = [ml(mlbelow),mlinsert,ml(~mlbelow)]; w = 2*pi*f;
%ml = [ml mO*(kOl+kl)/(kO+kOl)];
%[ml,w] = ndgrid(ml,w);
%f = w/(2*pi); bLlsqd-max = (((kO + kOl)^2*(bO*bl + bO*bOl + bl*bOl)*(bO*bl + bO*bOl +...
bl*bOl + bl*bT + bOl*bT) + kO1^2*mO*(kO + kOl)*(2*bO*bl + 2*bO*bOl + ..
2*bl*bOl + bl*bT + bOl*bT + 4*bO1^2) + kOl4*mO^2)/...
((bO + bO1)*(kO + kO1)^2*(bO + bOl + bT))); bL1_star-peak = sqrt(bLlsqd-max); mu = kOl/(kO+kOl); beff = mu^2*bO+(l-mu)^2*bOl+bl;
XbLl to maximize eff0 bL1_star_0 = beff+mu*sqrt(beff*bT); bL1 = bL1_star_0; bL1 = linspace(.l*bLlstar_0,10*bLlstar-peak,100*length(ml));
[bLl,ml,w] = ndgrid(bLl,ml,w); f = w/(2*pi);
%bLl = logspace(loglO(bLlstarpeak),loglO(bLlstar_0),10)';
%{ bL1 = bLl*ones(size(ml,l),l); bLl(l) = bL1_star-peak; bL1 = bLl*ones(l,size(ml,2));
%}
114
%bL1 = .001;X.3844%.3844
fi = sqrt((kOl+kl)./ml)/(2*pi);
XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
%derive impedances, etc.
%electrical impedance
Ze = Re+li*w*Le;
%mechanical impedances
ZO = li*w*mO+bO+kO./(li*w);
Z01 = bOl+kOl./(li*w);
Z1 = li*w.*ml+bl+bLl+kl./(li*w); den = ZO.*ZO1+ZO.*Z1+ZO1.*Z1;
%current i = Vin./(Ze.*(1+BL^2.*(ZO1+Z1)./(Ze.*den)));
F = BL*i;
%velocities uO = F.*(ZO1+Z1)./den; uO1 = F.*(Z1)./den; ul = F.*ZO1./den;
%real powers
PRe = (abs(i)).^2*Re;
PbO = (abs(uO)).^2*bO;
PbOl = (abs(uO1)).^2*bO1;
Pbl = (abs(ul)).^2*bl;
PbL1 = (abs(ul)).^2.*bLl;
115
Xefficiency
eff = (abs(ZO1)).^2.*bL1./((abs(ZO1)).^2.*(bL1+b1)+(abs(Z1)).^2*bO1+...
(abs(ZO1+Z1)).^2*bO+(abs(den)).^2/(BL^2/Re));
%fig fpeak = sqrt((kO+kOl)/mO)/(2*pi); fnormal = f/fpeak; effmaxtemp = max(max(eff)); effmax = zeros(size(effmaxtemp,3)); freduced = size(f,3); for i = 1:size(effmaxtemp,3) effmax(i) = effmaxtemp(1,1,i); freduced(i) = f(1,1,i); end plot(freduced/fpeak,effmax,'linewidth',2)
{ for i = 1:size(ml,2) end plot(f(1,1,i)/fpeak,effmax(i)) hold on
%} hold on
%plot([fl(i) fl(i)],[0 1]) xlabel('$\frac{\omega_1}{\omega_{001}}$','interpreter','latex','fontsize',16) ylabel('\eta_1(b_{L1}^*)') title(['Maximum efficiency \eta_1 as a function of driving frequency',...
'\omega_1 for optimal load b_{L1}^*(\omega_1)'1) axis([O 2 0 1]) mu = kOl/(kO+kOl);
116
beff = mu^2*bO+(1-mu)^2*bOl+b1;
%bL1 to maximize eff0 bL1_star_0 = beff+mu*sqrt(beff*bT); sigmaO = sqrt(1+mu^2*bT/beff);
%eff0_bL1_star_0 = (1+2*(beff/(mu^2*bT)+sqrt(beff/(mu^2*bT))))^(-1); effObL1_star_0 = (sigma0-1)/(sigmaO+1); bL1_sqd-max = (((kO + kO1)^2*(b0*b1 + bO*bO1 + bl*bOl)*(bO*b1 + bO*bO1 +...
b1*bOl + bl*bT + bOl*bT) + kOl2*mO*(kO + kO1)*(2*bO*bl + 2*bO*b01 +...
2*bl*bO1 + b1*bT + bO1*bT + 4*b01^2) + k01^4*mO^2)/...
((bO + bO1)*(kO + k01)^2*(bO + bOl + bT))); bL1_star-peak = sqrt(bL1.sqd-max); br = sqrt(mO*k01^2/(k0+k01)); sumbb2 = bO*bO1 + bO*b1 + bO1*b1; effpeak-bLlstarpeak = 1/(2*(1/(b01^2/br^2+1)*(1/(bT*br)*sqrt((bO+bo1)*...
(bO+bO1+bT)*((sumbb2*(sum-bb2+bT*(bl+bOl)))/br^2+2*sumbb2+4*b01^2+...
bT*(b1+b01)+br^2)))+(b0+bO1)*sumbb2/(bT*br^2)+...
(bO+bO1)/bT+sum-bb2/br^2)+1); effO = effObL1_star_0; fpeak = sqrt((kO+kO1)/mO)/(2*pi); effpeak = effpeak-bLlstar-peak; sigmapeak = sqrt(1+bT/(bO+bO1));
%effpeak = (sigmapeak-1)/(sigmapeak+1); eff-hypo = eff0*1./(sqrt((1-(freduced/fpeak).^5).^2+(effO/effpeak*freduced/...
fpeak).^2));
%/{ hold on plot(freduced/fpeak,eff-hypo,'--k')
%} hi = plot([0,1],[effO,effpeakl,'g--',[1 1],[effpeak eff0l,'g--',[1 0],...
[effO eff0],'g--');
117
set(hl,'linewidth',2)
f igure (2), clf bL1_max = zeros(size(eff,2),1); for
j
= 1:size(eff,2)
[, ind] = max(eff(:,j,j)); bL1_max(j) = bLl(ind,j,j); end plot(freduced,bLlmax) xlabel('f (Hz)') ylabel('bL1 (Ns/m)') title(['optimal bL1 as function of frequency (bL1^*_peak} = num2str(bL1_starpeak),' bLl*_0 = ',num2str(bL1_star_0)])
A.4 Matlab ode45-compatible function for nonlinear dynamic simulation of resonator/rectifier
function dx- = MDAodeclean(t,x,par)
Xt
Vmax = par.Vmax; f = par.f;
Re = par.Re; Le = par.Le;
BL = par.BL; mO = par.mO; kO = par.kO; bO = par.bO; kOks = par.kOks; bOks = par.bOks; mks = par.mks; kks = par.kks; bks = par.bks; mtks = par.mtks; ktks = par.ktks; btks = par.btks; %tertiary oscillator mr = par.mr; kr = par.kr; br = par.br;
118
FLks = par.FLks; %load forces gs = par.gs; %contact gaps thetar = par.thetar;
Xangle
of rotor surface mur = par.mur; %coefficient of friction of contact and rotor
I =x ; xO x(2); xOdot = x(3); xsks = x(4:6:end); xskdots = x(5:6:end); xtks = x(6:6:end); xtkdots = x(7:6:end); xrks = x(8:6:end); xrkdots = x(9:6:end);
%coordinate transformations x_par-ks = xtks*cos(thetar)+xsks*sin(thetar); %displacement parallel to rotor x_perp ks = -xtks*sin(thetar)+xsks*cos(thetar); %displacement perpendicular to rotor x_par-kdots = xtkdots*cos(thetar)+xskdots*sin(thetar); %velocities parallel to rotor x_perp-kdots = -xtkdots*sin(thetar)+xskdots*cos(thetar); %velocities perpendicular
%to rotor
Ffks = zeros(size(xsks)); incontact = (x-perp-ks<-gs); %logical array of outputs in contact
%incontactinds = find(incontact);
Xindices
of outputs in contact with rotor
Xnotincontactinds
= find(~in-contact);
%compute normal forces
Nks = (-kr.*(x-perp-ks+gs)-br.*xperp-kdots).*in-contact;
119
vreltol = le-2; slipping = incontact & (abs(x-par-kdots
xrkdots) > vreltol);
%compute friction force for slipping contacts
Ffks(slipping) = mur*Nks(slipping).*sign(xrkdots(slipping)-x-par kdots(slipping)); stuck = incontact & ~slipping; stuck-inds = find(stuck);
%solve linear system of equations for unknowns u
= [xskdoubledot,
%xtkdoubledot, Ffk] for each stuck contact and ensure (Ffk
<= mur*Nk) for i = 1:length(stuck-inds)
%disp('stuck') ind = stuckinds(i);
Nk = Nks(ind); kOk = kOks(ind); kk = kks(ind); kka = ktks(ind); bOk = bOks(ind); bk = bks(ind); bka = btks(ind); mk = mks(ind); mka = mtks(ind); xk = xsks(ind); xkdot
= xskdots(ind); xka = xtks(ind); xkadot = xtkdots(ind); xrkdot = xrkdots(ind);
FLk = FLks(ind);
A = [1 0 -sin(thetar)/(mk+mka); 0 1 -cos(thetar)/mka; mr*sin(thetar) ... mr*cos(thetar) 11; b = [(Nk*cos(thetar)+kOk*xO+bOk*x0dot-(kOk+kk)*xk-(bOk+bk)*xkdot)/(mk+mka);
...
(-Nk*sin(thetar)-kka*xka-bka*xkadot)/mka; FLk]; u = A\b;
Ffktemp = u(3); if abs(mur*Nk)>abs(Ffk-temp)
Ffks(ind) = Ffk-temp; %haven't exceeded max friction force: stuck else
Ffks(ind) = mur*Nk; %exceeded max friction force: slipping
120
end end
Ffk-Is = Ffks*cos(thetar)-Nks*sin(thetar);
FfkJs = Ffks*sin(thetar)+Nks*cos(thetar); num-outputs = length(xsks); dx = zeros(3+numoutputs*6,1); dx(1) = (Vmax*sin(2*pi*f*t)-I*Re-BL*xOdot)/Le; dx(2) = xOdot; dx(3) = (BL*I+sum(kOks.*xsks)+sum(bOks.*xskdots)-bO*xOdot-(kO+sum(kOks))*xO)/m0; dx(4:6:end) = xskdots; dx(5:6:end) = (FfkJs+kOks*xO+bOks*xOdot-(bOks+bks).*xskdots-(kOks+kks).*xsks).1
(mks+mtks); dx(6:6:end) = xtkdots; dx(7:6:end) = (FfkIs-ktks.*xtks-btks.*xtkdots)./mtks; dx(8:6:end) = xrkdots;
%dx(9:6:end) = (FLks.*(abs(Fk-rxs)>)-Fk-rxs)/mr; dx(9:6:end) = (FLks-Ffks)/mr;
A.5 Matlab program for animating a nonlinear dynamic simulation of the resonator/rectifier
clear all
Vmax = 10; f = 142; par = loadparam-clean(Vmax,f); fks = sqrt((par.kOks+par.kks)./(par.mks+par.mtks))/(2*pi); num-outputs = par.numoutputs; xstateO = zeros(3+6*numoutputs,1); opt = odeset('reltol',le-5);
121
tfinal = 15/f;
[T,XI = ode45(@(t,x)MDAode-clean(t,x,par),[0 tfinal],xstateO,opt); rr = par.rr; gs = par.gs; thetar = par.thetar; homes = [-(rr+gs)*sin(thetar),(rr+gs)*cos(thetar)];
XT = X'; xs = XT(4:6:end,:); xas = XT(6:6:end,:); xrs = XT(8:6:end,:); xrdots = XT(9:6:end,:); close all figure(1), cif for i = 1:numoutputs subplot(num-outputs,2,2*i-1) hold on title(['Rotor ', num2str(i)]) line-length = rr/4; rotoroutlinehandlesl(i) = circle([0,0],rr,1000,'-'); set(rotor_outlinehandlesl(i),'linewidth',2) rotor-position-handlesl(i) = line( [rr-line-length rr] , [0 0] , 'linewidth' ,2); contacthandlesl(i) = plot(homes(i,1),homes(i,2),'ro','markersize'
'linewidth',2);
%rotor_v_handles(i) = line([homes(i,1),homes(i,1)],[homes(i,2),homes(i,2)1); axis equal axis([-rr rr -rr rr])
122
subplot(num-outputs,2,2*i) title(['Rotor ', num2str(i),' zoom']) hold on linelength = rr/4; rotoroutline-handles2(i) = circle([0,01,rr,1000,'-'); rotorposition-handles2(i) = line(Err-linelength rrl,[0 0],'linewidth',2); contact-handles2(i) = plot(homes(i,1),homes(i,2),'ro','markersize',5,...
'linewidth',2);
%rotor-v-handles(i) = line([homes(i,1),homes(i,1)],[homes(i,2),homes(i,2)]); axis equal
%axis([-rr rr -rr rr]) axis([homes(i,1)-4e-3 homes(i,1)+4e-3 homes(i,2)-4e-3 homes(i,2)+4e-3]) end
%%define erase properties for plot handles
%none for no erase; xor for erase hold on erase-props = {'xor';'xor'}; for i = 1:num-outputs set(rotor-position handlesl(i),'erase',erase-props{i}) set(contacthandlesl(i),'erase',erase-props{i}) set(rotor-position handles2(i),'erase',erase-props{i}) set(contact handles2(i),'erase',erase-props{i})
%set(rotor_v_handles(i),'erase',erase-props{i}) end hold off %for plotting speed dt-plot = le-4; t = 0; i = 0;
123
T_reduced = zeros(size(T));
XTreduced = zeros(size(XT)); while t < T(end) t = t+dt-plot; i= i+1; ind = find(T<t,1,'last');
T_reduced(i) = T(ind);
XTreduced(:,i) = XT(:,ind); end
T_reduced = T_reduced(1:i);
XTreduced = XTreduced(:,1:i); xs = XTreduced(4:6:end,:); xas = XTreduced(6:6:end,:); xrs = XT-reduced(8:6:end,:); xrdots = XTreduced(9:6:end,:); rotorthetas = -xrs/rr;
%plot animation
Kh=suplabel(['frequency
= ',num2str(f)],'t',[.08 .08 .9 .9]); p = 1; skip-every = 5; for i = 1:skip-every:length(T-reduced) for j = 1:num-outputs subplot(num-outputs,2,2*j-1)
[coords] = homes(j,:)+[xas(j,i),xs(j,i)]; set(contact-handlesl(j),'Xdata',coords(1),'Ydata',coords(2)) set(rotor-position-handlesl(j),'Xdata',...
[(rr-line-length)*cos(rotor-thetas(j,i))...
rr*cos(rotor-thetas(ji))],'Ydata',...
124
[(rr-linelength)*sin(rotor-thetas(j,i)) rr*sin(rotor-thetas(j,i))]) drawnow subplot(num-outputs,2,2*j) set(contact-handles2(j),'Xdata',coords(1),'Ydata',coords(2)) set(rotor-position-handles2(j),'Xdata',...
[(rr-line-length)*cos(rotor-thetas(j,i))...
rr*cos(rotor-thetas(j,i))],'Ydata',...
[(rr-line-length)*sin(rotor-thetas(j,i)) rr*sin(rotor-thetas(j,i))]) drawnow end
%include lines commented below to save animated gif of simulation
X[im{p},
map] = frame2im(getframe(figure(1)));
Xp = p+1; end
%[temp, map] = rgb2ind(im{1}, 8);
%for k = 1:length(im)
% gifim(:,:,1,k) = rgb2ind(im{k}, map);
%end
%imwrite(gifim,map,'MDAODE.gif','DelayTime',O,'LoopCount',inf)
125
126
Bibliography
[1] Anani Ananiev, Thorsten Michelfelder, and Ivan Kalaykov. Driving redundant robots by a dedicated clutch-based actuator. volume 360, pages
167 - 176, Tiergartenstrasse 17, Heidelberg, D-69121, Germany, 2007. Hy- per redundant; Hyper-redundant robot; Mechanical construction;Natural environments;Redundant robot;Robotic platforms;.
[2] Arduino. Arduino website. http: //www. arduino. cc/, 2012. [Online; accessed
20-June-20121.
[3] M. F. Ashby. Materials selection in mechanical design, fourth edition [electronic
resource. Amsterdam ; Boston : Elsevier ; Burlington, Mass. : Butterworth-
Heinemann, 2011.
[4] Leo Leroy Beranek. Acoustics. New York, N.Y. : Published by the Acoustical
Society of America through the American Institute of Physics, 1993.
[5] J. P. (Jacob Pieter) Den Hartog. Mechanical vibrations. New York, McGraw-Hill,
1956.
[6] Helmut Moczala ... [et al.] ; translated by D.H. Hopewell. Small electric motors.
Institution of Electrical Engineers, 1998.
[7] Hasbro. Hasbro website. http: //www. hasbro. com, 2012. [Online; accessed
20-June-2012].
[8] Guowu Jia, Guang Chen, and Ming Xie. Design of a novel compact dexterous hand for teleoperation. pages 5 -10, Piscataway, NJ, USA, 2001//. compact dex-
127
terous hand;robot arm;robot manipulators;dexterous hands;teleoperation;high dexterity;kinematics;.
[9] Hamidreza Karbasi, Jan Paul Huissoon, and Amir Khajepour. Uni-drive modular robots: Theory, design, and experiments. Mechanism and Machine The-
ory, 39(2):183 200, 2004. Antilock brake system (ABS);Spring wrap clutches
(SWC);.
[10] Hamidreza Karbasi, Amir Khajepour, and Jan Paul Huissoon. Unidrive modular robot: Dynamics, control, and experiments. Journal of Dynamic Systems,
Measurement and Control, Transactions of the ASME, 128(4):969 975, 2006.
Local controllers;State space model;Structure systems;.
[11] Shiqi Li, Yang Liu, and Ming Xie. Implementation of a single motor driven manipulator with multiple joints. Industrial Robot, 38(1):48 - 57, 2011//.
DC motor;degrees of freedom pivoting;brake;joint control;clutch model;PWM control;PWM frequency;duty ratio;line tracking;arc tracking;manipulator design;shaft;multijoint manipulator;dexterous manipulator;light-weight manipulator;.
[12] Yanming Li, Peisun Ma, Changjun Qin, Xueguan Gao, Jianbin Wang, and Haihong Zhu. Design and study of a novel hyper-redundant manipulator. Robot-
ica, 21(5):505 509, 2003. Discrete manipulator;Hyper-redundant manipulator;Kinematical redundancy;.
[13] MIT. Mit 2.086 website. http://stellar.mit.edu/S/course/2/sp12/2.086/ index.html, 2012. [Online; accessed 20-June-2012].
[14] Robotshop. Tamiya planetary gear box - robotshop. http://www.robotshop.
com/tamiya-planetary-gear-box. html, 2012. [Online; accessed 20-June-
2012].
[15] Kenji Uchino. Piezoelectric ultrasonic motors: Overview. Smart Materials and
Structures, 7(3):273 285, 1998. Piezoelectric ultrasonic motors;.
128
[16] R.S. Wakeland. Use of electrodynamic drivers in thermoacoustic refrigerators.
Journal of the Acoustical Society of America, 107(2):827 - 32, 2000/02/. electrodynamic drivers ;thermoacoustic refrigerators;equivalent circuit model;suspension stiffness;mechanical parts;acoustic parts;operating frequency;electroacoustic efficiency;optimum mechanical load;.
[17] Wikipedia. Cycloidal drive - wikipedia, the free encyclopedia. http://en.
wikipedia. org/wiki/Cycloidal drive, 2012. [Online; accessed 20-June-2012].
129