Human Haptic Interaction with Soft Objects:
advertisement

Touch Lab Report 7
Human Haptic Interaction with Soft Objects:
Discriminability, Force Control, and Contact Visualization
Jhy-shing Chen and Mandayam A. Srinivasan
RLE Technical Report No. 619
January 1998
Sponsored by the Office of Naval Research
N00014-91-J-1454
N00014-92-J-1814
The Research Laboratory of Electronics
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
CAMBRIDGE, MASSACHUSETTS 02139-4307
PL
rll.
Il
·r
-rUh
UL
.*4
.·M
Human Haptic Interaction with Soft Objects: Discriminability, Force
Control, and Contact Visualization
l)y
Jyh-shing Chen
Subm itted to the Department of Mechanical Engineering
on May 13, 1996, in partial fulfillment of the
requirements for the degree of
Doctor of Philosophly in Mechanica.l Engineering
Abstract
The haptic interaction of lhumans with soft objects was studied from three perspectives:
softness discrimination, force control, and contact visualization. The abilities of humans in
actively discriminating softness was measured by using a specimen presenter system which
was built to randonmly present the specimens. Two experimental paradigms (1- and 2-finger)
and three finger conditions (normal, finger cot, and rigid thimble) were used to examine
the importance of various sources of information. When using 1 finger, the Just Noticeable
for normal and finger cot conditions and increased to about
Difference (JND) was about 5/%o
50% with the thimble. The JND results from 2-finger discrimination were lower than the
1-finger results for both normal and finger cot conditions, but were higher with the thimble.
Examination of the forces exerted on the specimens during 2-finger discriminations revealed
possible underlying discrimination strategies. In the force control experiments, subjects were
asked to exert several levels of constant forces under various finger conditions. The results
indicated tha.t the errors from tracking with visual feedback was significa.ntly lower than
that without visual feedback. No significant differences in force control were found with
either different softnesses or under the three finger conditions. The absolute errors were
higher when controlling higher target forces. Significant difference in force control was found
between the two hands of the subject who showed handedness in the softness discrimination
experiments. For contact visualization, a real-time imaging setup was built which consisted
of a videomicroscopy system and a tactile stimulator system. By using this setup, real-time
images from the contact region as wvell as the contact forces were digitized. Various image
processing techniques were developed and applied in order to analyze and improve the contact
images to distinguish between the contact and non-contact regions. Contact variables such
as force, nominal contact area, actual contact area, nominal pressure and actual pressure
'a
hypothesis on
were analyzed. Based on the visualization of the active slip phenomenon,
the contact pressure distribution was proposed. The developed hardware can be used for
evaluating human haptic abilities and providing biomechanical visualizations. The results
obtained have implications on the mechanisms of contact and find applications in dextrous
robot finger and haptic interface designs as well as in various steps involved in the automatic
fingerprint identification systems.
Thesis Supervisor: Dr. Ma.ndayam A. Srinivasan
Title: Principal Research Scientist
Contents
1 Introduction
1.1 Human haptic interaction with soft objects
1.2 Specific aimls of the thesis .........
L.3 Organization of the thesis .........
2
3
Softness Discrimination
2.1 Abstract ......
. . . . . . . . . . . . . . . . . . . . . . . .
L
2.2 Introduction .....
. ... ..........
. . . . . . . . . . . . . . . . . . . . .
2.3 Mlethods .......
......
. . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Softness specinnen preparation ...................
2.3.2 Specimen objecctive compliance ......
....
.......
2.3.3 Specimen preseenter ............
........... Ins
2.3.4 Finger conditic
..
2.3.5 Experimental )aradigms .................
2.3.6 Experimental pprocedures .............
2.3.7 Data analysis ..............................
2.4 Results........
...............................
..........
..........
2.4.1 1I-2AFC discri mination
2.4.2 S-2AFC discrirnination ...................
2.5 Discussion ......
...............................
. . . .. . . . . . . . . .
2.5.1 Effects of finge r conditions .
2.5.2 Effect of exper imental paradigms ....................
2.5.3 Force profiles . . . . . . . . . . . . . . . . . . . . . . . .
2.5.4 Possible softne ss discrimination mechanisms . . . . . . .
2.5.5 Important fact,ors in discrimination . . . . . . . . . . . .
Force Control
3.1 Abstract.
3.2 Introduction ............
3.3 Methods ..............
3.3.1 Experimental setup ....
3.3.2 Experimental parameters .
3.3.3 Experimental procedures .
3.3.4 Data analysis.
3.4 Results.
..............
3.4.1 Force profiles .......
3.4.2 Performance measurement
........................
........................
........................
........................
........................
........................
........................
........................
........................
........................
4
15
15
17
17
19
. . . . . ......................
19
. . . . . . ..............
20
. . . . . . .
21
..
21
..
. .
2..
22
23
......
25
....
26
...
28
.
29
30
.
30
37
42
42
.
. . . . . . .
. . . . . . .
. . . ....
42
45
46..
47
48
50
50
51
52
52
53
56
58
58
58
59
3.5
3.4.3 Statistical tests on experimental parameters ....
Discussion .
..........................
3.5.1 Effects of various experimental parameters.
3.5.2 Force control in haptic interaction with oljects.
4 Contact Visualization
4.1 Abstract.
4.2 Introduction .
.........................
4.3 Methods.
...........................
4.3.1 %Videomicroscopysystem .
4.3.2 Tactile stimulator svsteln .
4.3.3 Real-time imaging setup.
4.3.4 Active and passive touch experiments.
4.3.5 Observations of slip .
4.4 Contact image processing
4.5
4.6
4.4.1
Simple threshlolding ..................
4.4.2
4.4.3
I-lomonorphic processing ...............
Scan-line processing .................
4.4.4
Morpliological processing ...............
Implications on the mechanics of contact ..........
4.5.1
Overall (Nominal) and actual contact areas.....
4.5.2
4.5.3
Contact areas with soft specimens.
Description of slil)
Discussion ...........................
4.6.1 Contact phenomena ..
4.6.2
4.6.3
5
65
. .
. . . .
. . .
. . .
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
. . .
Contact information available for softness discrimination
The role of contact mechanics in haptic interaction . . .
Conclusions
5.1 Main results .........................
5.i.1 Softness discrimination.
5.1.2 Force control.
5.1.3 Contact visualization ................
5.2 Implications and applications.
...............
5.2.1 Human haptic interaction with soft objects ....
5.2.2 The pressure distribution hypothesis .......
5.2.3 Slip detection.
5.2.4 Dexterous robot finger design ...........
5.2.5 Biomechanical visualization.
5.2.6 Automated fingerprint identification system . . .
...........
...........
...........
...........
...........
...........
...........
...........
...........
...........
...........
.
69
69
70
71
71
72
74
74
76
i
79
79
79
81
83
87
89
89
93
102
105
105
107
108
110
110
110
111
111
112
112
113
114
114
115
115
A Softness Discrimination: Analysis of Applied Forces
116
B Softness Discrimination: JND Data
122
C Statistical Tests on Softness Discrimination JND Data
C.1 II-2AFC experiments.
...........
...........
C.2 S-2AFC experiments.
...........
C.3 Comparison of JND among different paradigms.
129
129
131
132
5
D Force Control Data
136
E Force Control Performance Measures
155
F
162
162
163
164
172
Statistical Tests on Force Control Performance Measures
F.1 Specimen softness and finger contact conditions . . . . . . . . . . . . ....
F.2 Target force magnitude ...........................
F.3 Visual feedback ..................................
F.4 Hand used .....................................
G Contact Visualization Analysis
..
179
6
List of Figures
2-1
2-2
2-3
2-4
2-5
2-6
2-7
2-S
2-9
2-10
Objective compliance data from three repetitions of the probe indenting the
standard specimen CR1. The numbers shown are the computed objective
23
compliances in the three trials ...........................
...........
25
The softness specimen presenter system. ..........
26
The force disp)lacement curves for finger wvith and without finger cot ....
Relative positions of the fingers and the specimens for the to experimental
paradigms. ...............................
27
2.
A plot of sensitivity index (d') and the specimen objective compliance differ:31
ence for subject CHI under normal condition ..................
Force traces from subject CI during a 1I-2AFC discrimination run under
normal condition. .
. . . . . . . . . . . . . ............
33
Force traces from subject CH during a 1I-2AFC discrimination run under
33
normal condition plotted in the confusion matrix format. ...........
run
under
during
a
1I-2AFC
discrimination
traces
from
subject
CH
Force
thimble condition. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
34
Force traces from subject CT during I-2AFC discrimination runs under normal(top graph), finger cot(middle graph), and thimble (bottom graph) condi..
35
tions ......................................
Force traces from subject JIK during 1I-2AFC discrimination runs under norma,l(top graph), finger cot(middle graph), and thimble (bottom graph) conditions ........................................
.
2-11 Forces on hard and soft specimens from subject CH during a S-2AFC discrimination run under normal condition.
.......................
2-12 Forces exerted on soft (solid line) and hard (dashed line) from the first 9 trials
of subject CH during a S-2AFC discrimination run under normal condition.
2-13 Peak forces on soft versus hard specimens for subject CH under normal condition ...................
.....................
2-14 'Pea.k forces on soft versus hard specimens for subject CT under normal condition ........................................
2-15 Peak forces on soft versus hard specimens for subject JK under normal con.....................
dition ...................
2-16 Peak forces on left versus right specimens for subject JK under normal condi.
.....................
tion ...................
3-1
3-2
The force control experimental setup .......................
Relative positions of the finger and the specimen for experiments on left and
right index fingers. ................................
7
36
39
40
43
43
44
44
53
54
3-3 Contact force display during the three stages of force control experiments for
left and right hands ................................
3-4 Typical force versus time traces for subject CH under different finger conditions
on various specimens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-5 Typical force versus time traces for subject CT under different finger conditions
on various specimens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-6 Typical force versus time traces for subject JK under different finger conditions
on various specimens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-7 A typical error and absolute error distribution for the two stages of an experimental run from a trial conducted on rigid specimen with 2N target force
under normal condition by subject CHI . . . . . . . . . . . . . . . . . . . . .
3-S A tpical error and absolute error distribution for the two stages of an experimental run from a trial conducted on rigid specimen with SN target force
under normnal condition by sbl) ject CH .
.. .. ... ... .. .. . .. .. .
57
60
61
62
63
64
-1-1. The videoinicroscopy system .
. . . . . . . . . . . . . . . . . . . . . . . . . .
The tactile stimulator sstemn . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
4-1-2
76
1-:3
The real-time imaging setup ............................
7s
8...........
-l-4 Application of simple thresholding to obl)tain the contact area .........
0
4-5 A block diagram for applying homomnorphic processing to determine the contact area ....................................................
. .82
4-6 Apply homomorphic processing to image ...................
.........
.
84
4-7 The scan-line processing on a fingerprint line .................
........
.
85
4-8S Results of applying the scan-line processing to a fingerprint image with different threshold values ...............................................
86
4-9 Results of applying binary morphological processing to obtain the outline of
the fingerprint contact regions ..........................
4-10 A sequence of images of contact between a fingerpad and Plexiglas specimen.
4-11 The wedge-ring pattern used in contact region boundary extraction ......
4-12 An estimate of the overall contact region boundary using the modified wedgering method .....................................
4-13 Various contact variables, plotted against time, calculated from the image and
force data obtaiied using low magnification ...................
4-14 Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification .............
4-15 Nominal contact area versus contact force for specimens of various softnesses
for subject JK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-16 Percentage contact data from three trials for subject CH in contact with the
soft specimen CA4(0.304mm/N) . . . . . . . . . . . . . . . . . . . . . . . . .
4-17 Percentage contact data from three trials for subject CH in contact with the
hard specimen AB4(0.086mm/N) .........................
4-18 Percentage contact results from various soft specimens used for subject CH.
4-19 Percentage contact results from various specimens used for subject CT ..
4-20 Percentage contact results from various specimens used for subject JK ..
4-21 Comparison of percentage contact results from various subjects for the hard
specimen ..................................................
4-22 Comparison of percentage contact results from various subjects for the medium
specimen .....................................................
8
88
90
91
92
94
95
96
97
98
99
99
100
100
101
4-23 Comparison of percentage contact results from various subjects for the soft
specimen. ............
. . . . . . . . . . . .
4-24 Typical images and scan-lines from contact between a fingerpad and a Plexiglas
plate when slip started to occur on the boundary. ...............
4-25 Comparison of gray scale values on a scan-line in a sequence of images at the
incipience of slip. .................................
4-26 Visualizing the slip sequence in action by combining images processed by the
outliiiing procedure. ...............................
A-1
A-2
A-3
A-4
A-5
A-6
A-7
A-8
A-9
S-2AFC
S-2AFC
S-2AFC
S-2AFC
S-2AFC
S-2AFC
S-2AFC
S-2AFC
S-2AFC
Peak
Peak
Pealk
Peak
Peak
Pealk
Peak
Peak
Peal;
force
force
force
force
force
force
force
force
force
plot
plot
plot
plot
plot
plot
plot
plot
plot
for subject
for subject
for subject
for subject
for subject
for subject
for subject
for subject
for subject
CH under normal condition .......
CT under normal condition.. ......
JIK under normal condition. .......
CH under finger cot condition.......
CT under finger cot condition.......
JIK under finger cot condition. ......
CH under thimble condition. .......
CT under thimble condition. .......
JIK under thimble condition. .......
C-1 A box plot of the softness discrimination JND values obtained under nor.......
nmal(N) and finger cot(C) conditions of the 1I-2AFC paradigm.
C-2 A box plot of the softness discrimination JND values obtained under noremal(N) and finger cot(C) conditions of the S-2AFC paradigm. ........
C-3 Box plot of the ND values obtained under both normal(N) and finger cot(C)
..
conditions tusing 1I-2AFC(1) and S-2AFC(2) paradigms for subject CHI.
C-4 Box plot of the JND values obtained under both normal(N) and finger cot(C)
conditions using 1I-2AFC(1) and S-2AFC(2) paradigms for subject CT.
.
C-5 Box plot of the JND values obtained under both normal(N) and finger cot(C)
conditions using 1I-2AFC(1) and S-2AFC(2) paradigms for subject JI. ...
F-i Box plot of data pooled from various finger and specimen conditions for subject
..............
CH with visual feedback when using the right hand .
F-2 Box plot of data pooled from various finger and specimen conditions for subject
CH without visual feedback when using the right hand .............
F-3 Box plot of data pooled from various finger and specimen conditions for subject
CT with visual feedback when using the right hand ...............
F-4 Box plot of data, pooled from various finger and specimen conditions for subject
CT without visual feedback when using the right hand .............
F-5 Box plot of data pooled from various finger and specimen conditions for subject
JIK with visual feedback when using the right hand ...............
F-6 Box plot of data pooled from various finger and specimen conditions for subject
JIK without visual feedback when using the right hand. ............
F-7 Box plot of data, expressed in percentage, pooled from various finger and
specimen conditions for subject CH with visual feedback when using the right
. .......................................
hand
F-8 Box plot of data, expressed in percentage, pooled from various finger and
specimen conditions for subject CT with visual feedback when using the right
.
hand. ..................................
9
Illllyl_ .I11II-.
lli-LI1III-_
101
103
104
106
117
117
118
118
119
119
120
120
121
131
133
134
135
135
166
166
167
167
168
168
169
169
F-9 Box plot of data, expressed in percentage, pooled from various finger and
specimen conditions for subject J3I with visual feedback when using the right
hand. ...................
1.....................
170
F-10 Box plot of data, expressed in percentage, pooled from various finger and
specimen conditions for subject. CH without visual feedback when using the
right hand . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 170
F-ll Box plot of data, expressed inll percentage pooled from various fingerl and
specimen conditions for subject CT without visual feedback when using the
right hand...
. . . . . . . . . . . . . . . . . . . . . . . ..... . . .
171.
F-12 Box plot of data, expressed in percentage, pooled from various finger and
specimen conditions for subject JIK without visual feedback when using the
right hand...
..........
.......
....................
171
F-13 Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CHI when using the right hand. .. ...
17-2
11-1 Box Iplot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CT when using the right hand. ....
.
173
F-15 Box plot of data, expressed in percentage, pooled from various interface, force,
a.nd specimen conditions for subject JIK when using the right hand......
.173
F-f16 Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CH when using the right hand. ......
175
F-17 Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject C-I when using the left hand. ......
176
F- lS Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CT when using the right hand. .....
176
F-19 Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen coiditions for subject CT when using the left hand. . . . . . . 177
F-20 Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject JIK when using the right hand... . . . . 177
F-21 Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject JK when using the right hand... . . . . 178
G-1 Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CH, Trial:1) .
....
180
G-2 Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CH, Trial:l). 181
G-3 Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CH, Trial:2) .......
182
G-4 Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CH, Trial:2). 183
G-5 Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CH, Trial:3) .......
184
G-6 Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CH, Trial:3). 185
G-7 Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CT, Trial:1). ......
186
G-8 Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CT, Trial:1). 187
10
-
G-9 Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CT, Trial:2).......
G-10 Various contact variables, plotted against contact force, calculated from the
image and force data. obtained using low magnification (Subject:CT, Trial:2).
G-11 Various contact variables, plotted against time, calculated from the image and
......
force data obtained using low magnification (Subject:CT, Trial:3).
G-12 Various contact. variables, plotted against contact force, calculated from the
image andl force data. obtained using lowr magnification (Subject:CT, Trial:3).
G-13 Varlious contact
188
189
190
191.
variables. plotted against time, calculated from the image and
192
force data obtained using low magnification (Sub ject:JIK, Trial:l) ......
from
the
G-14 Various contact variables, plotted against contact force, calculated
image and force data obtained using low magnification (Subject:J1K, Trial:l). 193
G-15 Various contact variables, plotted against time, calculated from the image and
194
force data obtained using low magnification (Subject:JIK, Trial:2).
G-16 Various contact variables, plotted against contact force, calculated froni the
image and force data obtained using low magnification (Subject:J K, Trial:2). 195
G-17 Various contact variables, plotted against time, calculated from the image and
196
force data obtained using low magnification (Subject:JK, Tria.l:3) ......
G-18Various contact variables, plotted against contact force, calculated from the
image aldll force data obtained using low magnification (Subject:JK, Trial:3). 197
G-19 Percentage contact area calculated from the image and force data obtained
198
using highl maognification (Sulbject:CH, Specimen: rigid).
G-20 Percentage contact a rea. calculated from the image and force data obtaineld
198
using high mnagnification (Subject:CH, Specimen :hard).
G-21 Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CH, Specimen:medium). . data. . . . . . .obtained199
G-22 Percentage contact area. calculated from the image and force data obtained
199
using high magnification (Subject:CH, Specimen:soft)......
G-23 Percentage contact area calculated from the image and force data obtained
200
using high magnification (Subject:CT, Specimen: rigid) .
G-24 Percentage contact area calculated from the image and force data obtained
200
............
using high magnification (Subject:CT, Specimen:hard).
G-25 Percentage contact area calculated from the image and force data obtained
201
using high magnification (Subject:CT, Specimen:medium) ..........
G-26 Percentage contact area calculated from the image and force data obtained
201
using high magnification (Subject:CT, Specimen:soft).. ............
G-27 Percentage contact area calculated from the image and force data obtained
202
............
using high magnification (Subject:JIK, Specimen: rigid).
G-28 Percentage contact area calculated from the image and force data obtained
202
using high. magnification (Subject:JIK, Specimen:hard) ............
G-29 Percentage contact area. calculated from the image and force data obtained
203
using high magnification (Subject:JK, Specimen:medium) ..........
G-30 Percentage contact area calculated from the image and force data obtained
203
.............
using high magnification (Subject:JIK, Specimen:soft).
11
·1_ _11^_·111 111____1______·^ ____I_··_ 11__
___1111111111^1 ---11__1111--
List of Tables
2.1
2.2
2.3
2.-I
3.1
3.2
Specimen Objective Compliance (mm/N). Serial number shown refers to spe......
cimens with ientical diluent proportions .............
24
I-2AFC discrimination results for subject CH under normal condition (Stand:...........
30
ard: CRt [0.304mm/N]) ..................
.32
:
.
............
(%)
JND
Il-2AFC softness discrimination mean
38
....
S-2AFC softness discrimination mean JND (%) ............
Absolute error in force control for subject CH-I using right hand index finger
with visual feedback ..........................
Absolute error in force control for subject CT using righlt hand index finger
..........
with visual feedback ..........................
65
(..........
66
3.3
Absolute error in force control for subject JIK using right hand index finger
with visual feedback ...............................
Absolute error in force control for all subjects using right hand index finger
66
3.-1
with visual feedback on the softest specimen ..................
67
3.5
Absolute error in force control for all subjects using right hand index finger
without visual feedback on the softest specimen
67
................
B.1 I-2AFC discrimination results for subject CH under normal condition (Stand...............
.............
ard: CR1 [0.304mm/N]) .
B.2 1I-2AFC discrimination results for subject CH under finger cot condition
I....................
.
(Standard: CR2 [0.298mm/N]) ...
B.3 1I-2AFC discrimination results for subject CH. under thimble condition (Stand..................
ard: CR4 [0.293mm/N]). ..........
B.4 S-2AFC discrimination results for subject CH under normal condition (Stand..............
ard: CR3 [0.300mm/N]) ................
B.5 S-2AFC discrimination results for subject CH-I under finger cot condition (Standard: CR2 [0.298mm/N]) ............................
B.6 S-2AFC discrimination results for subject CH under thimble condition (Stand.................
ard: CR6 [0.290mm/N]) ............
CT
under
normal condition (Standfor
subject
results
11-2AFC
discrimination
B.7
.............................
ard: CR1 [0.304mm/N])
B.8 11-2AFC discrimination results for subject CT under finger cot condition
...........
..............
(Standard: CR2 [0.298mm/N]) .
B.9 1I-2AFC discrimination results for subject CH-I under thimble condition (Standard: CR4 [0.293mm/N]) ...........................
B.10 S-2AFC discrimination results for subject CT under normal condition (Stand.....................
ard: CR3 [0.300mm/N]) ........
123
123
123
124
124
124
125
125
125
126
12
I __I^
I___LI^I__YII__Y___IIIIIIYI-^-^C-·-·L
_sULI··__I_
-----
_
I__
1
~ · II __X
___
B. 11 S-2AFC discrimination results for subject CT under finger cot condition (Standard: CR2 [0.298mm/N]) ..................
..........
B.12 S-2AFC discrimination results for subject CT under thimble condition (Standard: CR6 [0.290mm/N]) ............................
B.13 1I-2AFC discrimination results for subject JIK under normal condition (Standard: CR1 [0.304mm/N]) .............................
B. 14 1I-2AFC discrimination results for subject J IKunder finger cot condition (Standard: CR2 [0.298mm/N]) ...................
B.15 11I-2AFC discrimination results for subject J under thimble condition (Standard: CR4 [0.293mm/N]) ...................
..........
B.16 S-2AFC discrimination results for subject JIK under normal condition (Standard: CR3 [0.300mm/N]).
............................
B.17 S-2AFC discrimination results for subject JI under finger cot condition (Standard: CR2 [0.298mm/N]) . . . . . . . . . . . . . . . . . . . . . . . ....
B.18 S-2AFC discriminationl results for subject JIK under thimble condition (Standard: CR6 [0.290mm/N]) .............................
C.1 1I-2AFC data used for the two-way ANOVA table. ..............
C.2 1I-2AFC ANOVA table. The rows represent the conditions and the columns
represent the subjects. ...............................
C.3 S-2AFC data used for the two-way ANOVA table ................
C.4 S-2AFC ANOViA table. The rows represent the conditions and the columns
represent the subjects. ...................
. . . . . . . .
C.5 ANOVA table to compare 1I-2AFC and S-2AFC paradigms. The rows represent the experimental paradigms and the six columns represent three subjects
under both normal and finger cot conditions ...................
E.1 Absolute error in force control for subject CH using right hand index finger
with visual feedback ...............................
E.2 Absolute error in force control for subject CH using right hand index finger
without visual feedback. ...............................
E.3 Absolute error in force control for subject CH using left hand index finger with
visual feedback. ..................................
E.4 Absolute error in force control for subject CH using left hand index finger
without visual feedback. .............
................
E.5 Absolute error in force control for subject CT using right hand index finger
with visual feedback. ................................
E.6 Absolute error in'force control for subject CT using right hand index finger
without visual feedback ..............................
E.7 Absolute error in force control for subject CT using left hand index finger with
visual feedback ...................................
E.8 Absolute error in force control for subject CT using left hand index finger
without visual feedback. .............................
E.9 Absolute error in force control for subject JK using right hand index finger
with visual feedback ................................
E.10 Absolute error in force control for subject JIK using right hand index finger
without visual feedback. .............................
126
126
127
1..........
127
127
128
128
128
130
130
132
132
134
156
156
15 7
157
158
158
159
159
160
160
13
I·· I·_
1^
_·____II___III___·__I -C------··I·IU·III---_lllt·ULI
-YIII.--
-. I._IIII. --··.1 IYI·I^_--CI--LII--·II-C^I^L·I--1I·I-t
III-·---
E.11 Absolute error in force control for subject JI using left hand index finger with
visual feedback . .................................
E.12 Absolute error in force control for subject J using left hand index finger
without visual feedback .............................
F.1
161
161
Data. used for computing a one-way ANOVA table to determine the significance
of target force magnitude for subject CH with visual feedback when using the
riglht hand ......
................................
164
F.2
Data used for computing one-way ANOVA table to determine the significance
of target force magnitude for subject CH without visual feedback when using
the riolht, hand. ..................................
165
F.3
ANOVA table to determine the significance of target force magnitude for sub-
ject. CH with visual feedback wlhen using right hand. The columns represent.
the da.t. ol)tained from three target forces under various finger and specimen
conditions. ....
F. I
..................................
165
\ANOVA table to determine the significance of target force magllitude for sulbject CII without visual feedback when using right hand. The columns represent
the data, obtained from three target forces under various finger and specimen
condlitions . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . ...
(5
F.5 ANOVA table to determine the significance of the hand used for subject CT
without visual feedback. The columns represent data, in percentage, obtained
from various target forces under various finger and specimen conditions. ...
F.6 ANOVA table to determine the significance of the hand used for subject JI
with visua.l feedback. The columns represent data, in percenta.ge, obtained
from various target forces under various finger and specimen conditions. ..
F.7 ANOVA ta.lle to determine the significance of the hand used for subject JK
without visual feedback. The columns represent data, in percentage, obtained
from various target forces under various finger and specimen conditions. ..
174
174
1.5
14
._111
_·1_1---
I -I*I- -1 ·II I
-1
Chapter 1
Introduction
1.1
Human haptic interaction with soft objects
Our hands are a. la.rt of the human haptic system which is comprised of the biomechanical,
sensoimnotor and cognitive subsystems. Complete understanding of the human haptic system
requires an analysis of the mechanics of contact together with other aspects of the system such
as physiology, neuroscience and psychophysics. \Vhen we interact with objects in an environment, useful information is gathered from information sources involving visual, auditory, and
haptic systems. Exploration or manipulation of objects generally involves multimodal perception and intersensory integration [15][46][48]. Even though the interaction is multimodal,
we rely heavily on our hands to perceive object properties and control the interaction. This is
because the tactile information originates directly from the finger-object contact interface as
a result of contact forces imposed on the fingerpads. The mechanoreceptors underneath the
skin respond to the imposed loading and the generated neural signals are transmitted to the
brain through pathways of the central nervous system. To understand what information is
available to the sensors underneath the skin, visualizing the contact process is an important
step. In this study, therefore, a videomicroscopy system was built'to visualize the contact region of the fingerpad with transparent objects. The image sequences obtained from fingerpad
contact with rigid Plexiglas and transparent objects of different softnesses were observed and
analyzed by applying various image processing techniques to extract contact information.
At a behavioral level, human perception of the object properties related to the human
haptic system have been studied in terms of the detection, discrimination, and recognition
(see Sherrick & Cholewiak [37] and Loomis & Lederman [38] for a review). The stimuli that
15
__1·_^____11_11_____·-
1(-
I
have been used cover a wide variety such as point loads, surface irregularities, vibrotactile
threshold, patterns, roughness, and texture. However, not much is known about the human
discriminability of rubber-like soft objects.
Early studies on softness perception existed
in forms of stimuli ranking, scaling, and psychophysical laws: for example, studies on the
skills of test bakers[27], cheese maker and grader craftsmanship, and on scaling, matching
and cross-modal comparisons of softness percepltion[20].
One severe problem that hinders
quantitative understanding in such studies is the lack of of high quality stimuli which differ
only in softness [28]. In this study, human softness discrimination ability was examined by
l)erforming discrimination experiments with visually identical, smooth, compliant objects that
had no perceivable surface features and differed only in softness which could be controlled
and characterized to a. high level of precision.
Two sources of information are available during haptic interaction with objects. Tactile
information is gathered from the sensors embedded in the skin during contact; kinesthetic
information is generated by the sensory receptors around joints, tendons and muscles [11][21].
In order to determine the relative importance of tactile information at both gross and detailed
level as well as that of kinesthetic information during softness discrimination, three different.
finger conditions were examined: normal finger, finger covered with a finger cot and with a
rigid thimble. \Vith normal finger and finger covered with a thin glove-like latex finger cot..
both tactile information and kinesthetic information are available. The presence of finger cot
can, however, be thought of as a thin layer on top of the finger ridges which would remove
some of the fine details that the finger would otherwise perceive with normal fingers. The
rigid thimble replaces the .fingerpad-object interface with thimble-object and thimble-finger
interfaces. Thus, when discriminating softness wvith the thimble on, useful tactile information
which would otherwise be obtained from the contact region are removed.
Therefore, the
subjects would need to rely on the unperturbed kinesthetic information.
In an attempt to addressmultifinger interaction with objects, an experimental paradigm
that used the two index fingers from both hands was also tested in addition to one-finger softness discrimination experiments. Aside from analyzing the Just Noticeable Difference (JND)
results, the forces applied for discrimination were also examined to reveal the strategies adopted by the subjects.
To further understand the underlying limitations in the ability to
achieve fine discriminations of softness, force control experiments were conducted to examine
the subjects' abilities in controlling normal forces of contact with objects of different soft-
16
nesses. Both left and right index fingers under normal, finger cot, and thimble conditions
were examined in following and controlling three different constant target force magnitudes
with and without visual force feedback available.
1.2
Specific aims of the thesis
The specific aims of this thesis are (1) to develop a videomicroscopy system for visualization
of the contact region of the human fingerpad during contact xwith transparent objects, (2)
to develop a single degree of freedom tactile stimulator capable of transporting stimulus
objects t.o indent the fingerpad at a. controlled velocity, (3) to develop a. specimen presenter
to plerform
sychol)llhysical experimentl
s on the human Ilaptic discrimination of object, softness,
(4) to characterize the human ability in controlling normal finger forces with specimens of
various soft. nesses under several contact. interface conditions, (5) to perform passive and act.i ve
touch expleriments involving the human finger and transparent soft specimens to characterize
how the contact region is affected by the parameters such as contact force and specimen
compliance, and (6) to gain a. deeper understanding of how contact information and force
control affect the ability to discriminate softness. It is hoped that the results of this study on
the human haptic performance and the underlying mechanisms will also provide useful data
and insights for the design of haptic interfaces and dextrous robot fingers.
1.3
Organization of the thesis
This thesis is organized as three parts: softness discrimination. force control, and contact visualization. Background, devices, experiments, and results related to each topic are
provided in the corresponding chapters.
Chapter 2 describes the measurement of the human ability in softness discrimination.
Background information on the human haptic system and previous work on softness discrimination are provided. A device for specimen presentation was designed and built to measure
the human ability in softness discrimination under various finger conditions and experimental
paradigms. The results are discussed and the forces used by subjects are examined.
In Chapter 3, the measurement of the human ability in normal force control with soft
objects is presented.
examined.
Background information on the related human sensory abilities are
Experiments to determine the human abilities in controlling normal forces of
17
-^-----_LIII
_Ill-l·l·XII_-_I---·--^-L-·ll^^··lll^·C----- -II____
.
contact with objects of various softnesses and under various experimental conditions were
conducted. The performance of the subjects on force control under various conditions were
measured and compared.
The efforts on contact visualization is presented in Chapter 4. A videomicroscopy system
was built to enable visualization of the contact region of tile human finger with transparent
objects. A tactile stimulator system was built to conduct controlled contact experiments.
\\ith the integration of the two systems, real-time experiments to observe both contact region
and contact forces are now possible. The device was used to acquire images under both active
a.nd passive touch experiments to analyze contact. information.
Various image processing
techniques were apl)lied to facilitate phenomenologica.l description and to qulantify tile image
data. for overall (nominal) and actual contact areas.
Chapter 5 concludes the main results from the three aspects of softness discrimination
detailed in the previous chapters. Imlplica.tions of the results on human haptic interactions
with soft. objects, possible pressure distribution, and slip cletection are described. In addition,
the apl)licability of the systems and results from this study to dexterous robot finger design,
bionlechanical visualization, and automated fingerprint identification systems is discussed.
18
Chapter 2
Softness Discrimination
2.1
Abstract
Tile humlan ability to actively liscrimninate softness was measured. Pairs of silicon rubber
specimens with compliances from 0.293mm/N to 0.635mm/N were randomnly presented to
estimate the Just Noticeable Difference(J ND) of the subjects in softness dliscrimlnination. Two
experimental paradigms \with three different finger conditions were used to evaluate the mechanisms that were used (luring discrimination. Three finger conditions (normal, finger covered
with a finger cot, and finger covered with a. rigid thimble) were chosen to affect the sources
of information available to the subjects for making the discrimination. With finger cot, the
detailed ridge level mechanics of contact was filtered by the thin (0.06mm) latex finger cot.
With thimble on, the subject had to rely mostly on the kinestletic information. Two forcedchoice discrimination paradigms were the use of the index finger from the dominant hand
sequentially (1L-2AFC) and the use of both index fingers from both hands simultaneously
(S-2AFC). In the S-2AFC experiments, the two specimens were available during the whole
process of discrimination; thus the effect of memory was expected to be less than that in
the 1I-2AFC experiments. With the 1I-2AFC paradigm, the mean JND values for the three
subjects were 6%, 7%, and 17% under normal condition, 4%, 5%, and 14% under finger cot
condition, and 43%, 50%, and 70% under thimble conditions. Analysis of variance showed
that results from normal and finger cot conditions were not significantly different.
With
S-2AFC paradigm, the mean JND values dropped for both normal and finger cot conditions
as expected (less memory effect) and the difference was significant at 1% level: the JND
values were 3o to 5% for two subjects and were 8% to 10% for the third.
On the other
19
_-__
------. _. -_- 1-1
· II I I
hand, the resulting JND under the thimble condition increased. Analysis of force profiles
used during both 1I-2AFC and S-2AFC paradigms indicated that typica.l contact duration
wvas 0.5 sec to 1.0 sec. The peak force used ranged from about 10N to 40N. Comparing the
peak forces used on the two specimens in the S-2AFC experiments suggested three strategies
that might have been used by the subjects: (1) to achieve the same amount of deformation
of the two specimens by exerting higher forces on the harder specimen, (2) to compare the
contact information obtained by aplying the same amount of pressure on both specimens
(thus higher peak forces on the softer specimen), and (3) to apply the same amount of peak
forces on both specimens and compare the deformations.
2.2
Introduction
1-1umans use their hands to explore and manipulate objects. In both explora.tion andl
nalilp-
ulation, the contact forces as well as the finger positions must be controlled. In addition,
properties of the object such as compliance, shape, and texture are sensed and used to avoid
droppling or crushing the objects.
Softness is a. subjective measure of the compliance of an object. To assess the softness
of an object, the object is squeezed with the hand or indented with the finger. During such
a. process, two sources of information are available: Tactile information is gathered from
the sensors embedded in the skin near the contact region; kinesthetic information is generated by the sensory receptors around joints, tendons and muscles (Srinivasan and LaMotte
[42][40][41]).
Researchers have conducted various experiments in measuring human sensory and motor
performance. Early studies on softness perception existed in the form of stimuli ranking, scaling, and determination of psychophysical laws. For example, studies have been carried out on
the skills of test bakers[27], cheese maker and grader craftsmanship, and on scaling, matching
and cross-modal comparisons of softness perception[20]. Roland and Ladegaard-Pedersen[35]
found that the discrimina.bility of spring strength was unaffected by local anesthesia of skin
and joints when the springs were held between thumb and index finger. However, not much is
known about the human resolution and the discrimination mechanisms with rubber-like soft
objects. Just Noticeable Difference (JND) is a common measure of human sensory resolution
and has been measured for a. variety of physica.l quantities. The JND values for length (Dur-
20
_- -I._- - -1-1.
-X·
---- I----L.ILII
1~--.- ,. ---- -_
- Pl · il
I
^sl -C^I·~-··
---
I- II_
lach et al [13]), force (Pang et al [34]), compliance and work have been measured by various
researchers. Tan et al [45] have measured the JND in compliance between two rigid plates,
controlled by linear motors, grasped between the thumb and index finger. They found that
the JNDs ranged from about 8% to 99% depending on whether or not the subjects had cues
such as terminal grasp force or total work done. Jones and Hunter [26] performed experiments
where subjects actively mnoved the forearm about the elbow joint to sense the compliance of
a, preprogralmmed linear motor attached to one of the wrists, and to match its coml)liance
by Imodifving that of an identical linear motor attached to the other wrist. They estimated
the comlpliance JND to be about 23%t under those conditions.
Srinivasa.n and Chen [39]
measuredc the hunlan ability to control the normal forces of contact with a. rigid plate under
a. variety of experimental conditions and found that performance degraded in the absence of
tactile information and visual feedback. Sriniva.san and LaMNIotte [42] investigated the ability
of hunans to tact.ually
discriminate the softness of elastic objects with deformable (rubber
specimens) and rigid surfaces (spring cells). They performed three types of experiments: active touch with normal finger, active touch with local cutaneous anesthesia, and passive touch,
to measure the lhuimla.n discriminability and to isolate the associated information-processing
mechanisms. Thev found that tactile information was sufficient for discriminating the rubber
specimens used in their study. In some of their experiments, the peak forces were constrained
to 50, 75, and 90 gwt in order to study the effect of force on discrimination.
The work reported here was designed to look a.t the softness discrimination from a different
perspective. The subjects, with their eyes closed, were allowed to use any force to discriilla.te
the specimens. Two experimental paradigms together with three different finger conditions
were used to study the subjects' JND performance on softness discrimination for rubber
specimens.
2.3
Methods
2.3.1
Softness specimen preparation
The specimen casting procedure was similar to what Srinivasan and LaMotte [42] used in
their experiments, but the mounting method used here was improved to enable high volume
production of the specimens. A series of compliant specimens were cast by mixing different
proportions of General Electric (GE) SF96-50 silicon rubber diluent to fixed proportions of
21
1
-·-----I-L-C-X-lLIIUC
. -.
I^
-
·-.
.-----.Yllill---l
r·-^11·^111--
-I--L--YLUI-
. _.
^^.--XI^1-_.·.l-----.·-_-·
--·.I_-·--^1I1I--
·--·X·Y-IIII
.I__l--·L1--lll.^-
II-III
1-
I_-
GE RTV615A and RTV615B components. The diluent GE SF96-50 is a replacement for the
discontinued GE RTV910 used by Srinivasan and LaMotte.
The component proportions were determined by weight using a digital scale and dispensed
via pipet. The mixtures were thoroughly mixed by hand and then poured into 30 mm cliameter
petri dishes to form transparent specimens. Depending on the proportions of the mixture, it,
took as long as 24 hours for some of the specimens to cure completely. At least 5 specimens
of the salme dliluent proportion were cast to allow for wear and tear from the experiments andll
for force control and contact visualization studies. The specimens were visually identical and
were mainly distinguished by the label on the side which indicated their batch and sequence
code.
Several batches of slpecimens were made for the pilot experiments on ranllking softness in
order to determine holw close the compliance of the specimens should be. It turned out that
specimens with much filner
ifferences than those that Srinivasan and LaMotte used had to
be pIrepared for the JND experiments. The standard specimen chosen for the experiment had
an objective coinpliance (see next section) of 0.30 mm/N.
2.3.2
Specimen objective compliance
An objective measure of the specimen compliance was obtained by the characteristic forcedisplacement relationship of each specimen. A linear stepper motor system with a microstepping drive was used to indent the specimens at a constant velocity of 0.5 mm/sec with
the flat end of a 1/4 inch diameter circular probe. As the probe indented the specimen, a,
force sensor mounted between the probe and the motor was used to measure the indentation force at 1000 samples per second data rate. Since the stepper motor movement was
completely determined by the number of digital pulses received, its relative position can be
determined to better than 1lim accuracy. The indentations were repeated three times, and the
depth of indentation was 3 mm for the soft specimens and smaller for the harder specimens.
The resulting force-displacement curves were then used to compute the specimen objective
compliance by measuring the slope of a fitted straight line with least square error.
The objective compliance value computed from the characteristic line using least square
line fitting is significant to the third decimal place or 0.3% of the compliance value for the
specimen with the lowest objective compliance. The resulting values from the three repetitions
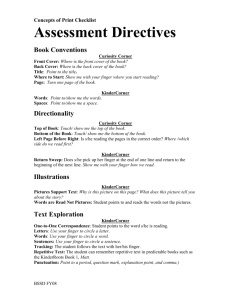
were averaged and used as the specimen compliance. Figure 2-1 shows the characteristic
22
Compliance Calibration --- CR1 = 0.3041 mm/N
11
|
7
6
5
z'
4
0
.3
2
Trial 1 = 0.3043
Trial 2 = 0.3034
Trial 3 = 0.3047
0
0
0.5
1
1.5
Displacement (mm)
2
2.5
3
Figure 2-1: Objective compliance data from three repetitions of the probe indenting the
standard specimen CR1. The numbers shown are the computed objective compliances in the
three trials.
curves for the standard specimen CR1 which shows that the force-displa.cement data. are
very repeatable and linear to a high precision. The specimens used in all the discrimination
experiments had compliances that ranged from 0.293mm/N to 0.635mm/N. Ta.ble 2.1 lists
the objective compliance of the batches of specimens used in the discrimination experiments.
Serial number shown indicates specimens with identical diluent proportions.
2.3.3
Specimen presenter
The measurement of abilities of human subjects requires experiments with a. large number
of trials. For conducting such experiments efficiently, a specimen presenter was designed. In
essence, the specimen presenter is a stepper motor based system controlled by a computer.
It is capable of recording the forces used by subjects during trials and switching specimens
between trials. The computer determined randomly how specimens were presented to the
subject with a pre-determined probability.
A block diagram of the specimen presenter system is shown in Figure 2-2. The specimens
were mounted vertically inside two specimen holders. The holder is slightly tapered to match
the shape of the petri dishes.
Its bottom has a. circular opening but does not allow the
specimen to fall through. The specimens fit nicely tight and can also be taken out without
23
Batch Code
CR
DR,
ER
FR
IHT
IT
JT
1
0.304
0.312
0.34.5
0.400
0.455
0.52:3
0.635
2
0.298
0.309
0.347
0.382
0.450
0.514
0.611
Serial Number
3
4
0.300 0.294
0.320 0.323
0.348 0.337
0.384 0.373
0.416 0.420
0.518 0.528
0.608 0.598
5
0.293
0.326
0.341
0.375
0.442
0.531
0.610
6
0.290
0.324
0.340
0.380
0.450
0.529
0.587
Table 2.1: Specimen Objective Conlpliance (m m/N). Serial number shown refers to specimens
with identical (cilllent proplortions.
too much effort. 1
An Eastern Air Devices model LA23BCIK-01 stepper motor was used to rotate the specimens. The Inotion of the motor was controlled from the parallel input/output interface of
the comlputer. The motor control signals were fed to a model 7006-DB motor driver from
American Scientific Instruments Corp. (ANISI) whicli drove the motor. Two custom made
strain gage based force sensors were designed and fabricated to measure the forces exerted
by the subjects on the specimens. A finite element analysis was conducted, by using ADINA
software, to compare the responses to a point load and a, distributed load from three differ-
ent force sensor designs: simple cantilever beam, cantilever beam with a hole, and cantilever
beam xwith two holes and a slot (binocular). Binocular spring element was chosen to construct the sensors because it is more rigid and less sensitive to location of force application.
Four strain gages, made by Measurements Group, were mounted on the top and bottom
surfaces of each force sensor near the center of the two holes of the binocular to form a full
bridge. The force signals were amplified by a signal conditioner which consisted of an analog
module rack from AMSI and two Analog Device model 5B38-05 strain gage input modules.
These amplified force sensor signals were then digitized at 1000 samples per second rate by
a RTD-ADA3100 data acquisition board made by Real Time Devices Inc. under the control
of custom developed C programs.
The choice of having the specimens mounted vertically on the motor has two advantages.
'The machining of the force sensors and the specimen holder as well as other attachments for the experiments was carried out at MIT ME student shop under the supervision of Norman Berube. The author wishes
to thank him for his patient guidance and advice on machining.
24
Figure 2-2: The softness specimen presenter system.
First, since the motion of the finger during perception will be horizontal, the gravity effect
will be the same for the chosen exlperimental paradigms. Second, the force sensor offset value
need only be measured once and can be applied to the two possible specimen positions used
in the experiments.
2.3.4
Finger conditions
To further our understanding of the underlying mechanics of the softness discrimination task,
three finger conditions.were used: normal finger, finger covered with a 0.06mm thick latex
finger cot, and finger covered with a rigid thimble.
NWith normal finger, subjects have both tactile and kinesthetic information and possibly
the surface texture information if there is any. When the finger is covered with a thin latex
·finger cot, one can still feel tlie surface easily. It is similar to the glove worn by surgeons,
except that the finger cot here was just for a single finger. The compliance characteristics
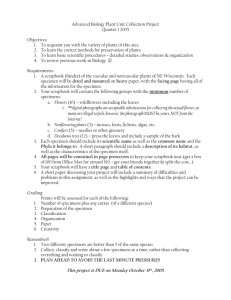
of the finger with and without finger cot is similar as shown in Figure 2-3. However, the
finger ridge level contact information is degraded. When the finger wears a rigid thimble, the
deformation of the finger and the deformation of the specimen depends on the contact force
alone. The interactions between the finger and the specimen is replaced by the interactions
between thimble with the specimen and with the finger.
25
Normal Finger (solid), Finger Cot (dashdot)
,
^
2o
L0
U-
0
0.5
1
1.5
Displacement (mm)
2
2.5
3
Figutre 2-3: The force displacemlent curves for finger with and without finger cot.
By comparing the results from the three different conditions, we can infer how softness
discrimination is affected by the presence of information froin the three different information
sources: detailed finger ridge contact information, degraded tactile information, and the
kinesthetic information.
2.3.5
Experimental paradigms
Since humans interact with objects with multiple fingers most of the time. it is interesting
to look into how humans discriminate softness using either a single finger or two fingers.
Therefore, two paradigms were used: single finger from the dominant hand and one finger
from each hand.
In the single-finger case, the experiment consisted of a one-interval, two-alternative forced
choice (11-2AFC) paradigm with correct answer feedback. The subject moved the index
finger to indent the specimen mounted on the specimen presenter while the rest of the fingers
grasped a fix rod for achieving a standard posture. The subject had to decide whether the
specimen presented was the softer or the harder one of the two. In the two-finger case, the
experiment consisted of a two finger simultaneous, two-alternative forced-choice (S-2AFC)
paradigm with correct answer feedback. The two index fingers indented the two specimens
mounted on the specimen presenter and the subject had to decide whether the left or the
26
Specimen
Holder
Posture
Rod
Force
Sensor
D1
Figure 2-4: Relative positions of the fingers and the specimens for the two experimental
paradigms.
right one was the softer specimen of the two. Figure 2-4 shows the relative position of the
specimens and the fingers in the two experimental paradigms.
One of the significant differences between the two paradigms is the information available
to the subject. In the 1I-2AFC case, subjects must remember how specimens felt like in order
to come up with a correct response. In the S-2AFC case, however, both specimens were
available to the subject during the discrimination. Therefore, the subject can compare both
specimens during the indentation. This will be an easier task if the ability to control and sense
at each hand is not reduced by the fact that both hands are involved at the same time. One
might expect that since humans use multiple fingers on a daily basis, that should not be too
bad an assumption. Clearly, we can squeeze two different rubber balls and distinguish them.
But, can we squeeze a rubber ball composed of two semi-spheres with different material
properties using fingers from two different hands and distinguish their relative softness ?
27
2.3.6
Experimental procedures
To obtain statistically significant results, the discrimination experiments require a substantial
number of trials for each subject. One standard and four comparison specimens were used
for each experimental condition. The comparisons were selected depending on the subject's
performance and the finger conditions. Each subject was tested for only one lhoutr per day
to avoid bloredom or possible injuries from repeated motions. Also, finger exercises were
provided in between the four repeated runs of 64 trials.
The first run was used as the
training run and the data were not used in the final JND calculations.
However, it was
conducted just like a. normal run.
Before each run started, the subject was given an opportunity to touch the two specimens
when tlle
were laying on the bench. Afterwards, the specimens were mounted horizontally
on t.le specimen presenlter. The subject rested their elbow on a. flat surface and the palm
grabbed onto a. roughly 3/4 inch diameter wooden rod for posture reference and kept their
eyes closed. An offset value of the force sensor was taken while the specimens were horizontal.
Afterwards, the motor moved to its vertical home position with the hard specimen located on
the top and the soft specimen at the bottom. Depending on the random number generated,
the motor rotated either clockwise or counterclockwise with an equal probability. Thus either
the soft or the hard specimen was located at the right after the motor stopped. During the 64
trials, the program controlled the motor to go to the two possible test configurations 32 times
each. After the motor reached its destination for a particular trial, a delay of 0.5 second was in
effect to avoid any vibration which might cause incorrect force sensor reading. Afterwards,
the computer speaker beeped to prompt the subject to move the finger for indenting the
specimen.
A circular buffer was used in the force data collection program which had a threshold force
of 0.5N. A total of two seconds of force data was collected for each trial, Which consisted
of 0.5 seconds before 0.5N force was reached and 1.5 seconds after. This data collection
scheme allowed force data from most of the trials to be recorded appropriately. Occasionally,
however, the subject would make multiple contacts using forces above the threshold; the
data collection was triggered on the first significant contact which might not have all the
appropriate data. Or, the subject might start indenting the specimen after the motor stopped
but a little before the computer beeped. In that case (less than 1% of the trials), the force
28
trace showed a. sudden jump from zero at time equal to 0.5 second.
2.3.7
Data analysis
In the discrimination experiments, there were two stimuli Sl1, S 2 and two possible responses
I1, R 2. If f
represents the number of trials the subject responded with Ri to a. stimulus
,Si, the results can be arranged in the following 2 by 2 confusion matrix format:
The sum of the elements
correct. then fll = .f'22
f
R1
R2
'S1
fll
.f12
S2
.f21
122
should addl
up to 64 for one run. If the subject was 100%X
32 and fl2 = .f21 = 0. If the subject made mistakes, the off-
diagonal elements would be higher. By applying the decision model that is used extenlsively
in psychol)hysics [12] based on signal detection theory [44], the sensitivity index d' and bias
/3 of the subject can be quantified. To get more reliable estimates, the data from the three
runs (excluding the training run) were pooled together for such calculations. The JND of
softness is the difference in the stimuli (percentage difference of the objective compliance)
that corresponds to a d' value of 1 and is estimated by dividing the percentage difference by
the calculated sensitivity index d'. To combine the data from different comparison softness,
the JND was obtained by employing the standard procedure of averaging the four individual
.JND estimates.
The analysis of variance (ANOVA) method was used to find out whether the results were
influenced by factors such as finger conditions and experimental paradigms. The individual
JND estimates from each comparison specimen run was used for the calculations of the
ANOVA table. To compare any two JND results obtained under different circumstances,
the Student's t test [31][24][36] was used. The statistical analysis was performed by using
MATLAB statistics toolbox. The results from different subjects were not averaged in order
to observe their differences and to analyze why such differences existed.
29
.__I___II
_X
I__I
Specimen
Difference
Confusion
Matrix
d'
:/3
.JND (%)
DRI
2.6%
55 41
29 67
0.70
-0.17
3.8
DR5
ER1
7.1%
13.5%
74 22 74 22
20 76 17 79
1.55
1.67
-0.04
-0.09
4.6
8.1
MeanJND = 6.1%
FR1
31.7%
92
4
1 95
4.04
-0.29
7.8
Table 2.2: 11-2AFC discriminationi results for subject CH under normal condition (Standard:
CR1 [0.304mm/N])
2.4
2.4.1
Results
II-2AFC discrimination
In the 1I-2AFC d(iscrimination,, the subjects used the index finger from their dominant hand to
indent the specimen. Th ree subjects participated in the experiments: CH(male), CT(female),
and J
(female). Three finger conditions were tested to see how different contact interface
conditions affect the performance of the subjects. The batches of trials for different conditions
and paradigms were randomized to minimize training effects.
JND results
The discrimination results from a.n experimental run was represented by a. confusion matrix.
The calculation of the sensitivity index, d', response bias , and JND for a. given comparison
specimen was performed by using the procedure outlined in the Methods section.
For example, table 2.2 shows the discrimination data and the calculated JND value for
subject CH under normal condition. Specimen CR1 was used as the standard and the four
comparison specimens and the differences in objective compliance from the standard are
listed. The confusion matrix was pooled from the three runs. The sensitivity index as well
as the response bias was calculated according to the decision theory. The d' value obtained
was then used to estimate a JND value by dividing the percentage difference in specimen
compliance by d'. Finally, the JND under normal condition for subject CH was obtained by
taking the mean of the JND estimates. Figure 2-5 shows how the sensitivity index d' varies
with the difference in objective compliance of the comparison specimen. A least square line
30
A
I
1
·
x
4
. . . . ..
. ..... . .. ... .
3.5
.
.
.
·-
3
E
' 2.5
'0
2
1.5
n r
0
5
10
15
20
25
Compliance Difference (%)
30
35
Figure 2-5: A plot of sensitivity index (d') and the specimen objective co]mplia.llce difference
for subject CH under normal condition.
was drawn to show that tile relationship was a.pproxima.tely linear.
A summary table for the JND va.lues calculated using this method under various conditions
for all subjects are listed in Table 2.3 (Data used for these calculations are presented in
Appendix B). \Vith a thimble on the finger, the subjects' performance was a. lot worse than
the normal and finger cot conditions. For subject CH, the JND increased from 6.1% under
normal condition to 43.3% under thimble condition. Keeping in mind the spread of the JND
estimates in Table 2.2. we can observe that subjects CH and JIK had similar performance
under normal and finger cot conditions . The JND values for subject CT were higher than
the other two subjects in all three conditions. The JND increased from 17.4% for normal and
14% for finger cot to 70.2% with thimble on. Clearly, with thimble on, none of the subjects
were able to perform anywhere close to what they could under either normal or finger cot
conditions.
Analysis of variance (ANOVA) was used to test for the effects of subjects and finger conditions and Student's t tests were used to compare the performances from different subjects
under normal and finger cot conditions. There was a significant difference between the subjects at 1% significance level (the significance is the probability of observing the given result
by chance given that the hypothesis is true). However, the differences between normal and
finger cot conditions and the interaction between subject and condition factors were small.
31
-----C---l
-
-·I
Condition
Normal
Finger cot
Thimble
CH
6.1
4.3
43.3
Subject
Mean
CT
JI
value
17.4
7.0
10.2
14.0
.5.0
7.8
70.2 49.8
54.4
Ta.ble 2.3: 1.1-2AFC softness liscrimina.tionl mean JND (%)
Significant differences of the nean J.ND, at. 5
significance level, were found between subjects
(C'H,CT) under normal condition and between subjects (CH,CT) and (JIK,CT) under finger
cot condition. The complete analysis is presented in Appendix C.
Force profiles
A few raw data graphs are slownl here to illustrate how the applied forces varied during a. tria.l
and how tlhey varied across trials, conditions, and subjects. Figure 2-6 shows the force traces
during a. discrimination run tha.t consisted of 64 trials. In that particular run, the specimens
used were ERI (comparison) and CR1 (standard) and the finger condition was normal. Even
though the subject got 80% correct calls in the discrimination, the force traces varied from
trial to trial with a pea.k force ranging from I0N to 16N. The force traces intersect at 0.5
sec time mark with a. force magnitude of 0.5N because of the force data collection mechanism
explained in the experimental procedure. The duration of contact was about 500 msec to
800 msec during that run and the indentation phase seems to take a little longer than the
releasing phase.
Figure 2-7 shows the same force traces from the 64 trials separated according to the
stimuli and responses (the confusion matrix format). The title for each panel indicates which
stimulus (S) and response (R) group the force traces came from. The upper left and the
lower right graphs show the forces from the correct responses while the upper right and the
lower left graphs show the forces from the incorrect responses. The numbers on the upper
left corner of each panel indicates the number of force traces in that panel. Those numbers
together would make up a confusion matrix. The top row shows the forces used for the
softer specimen and the bottom row shows those used for the harder specimen. For the same
specimen (panels in the same row), the subject used forces which varied from trial to trial.
The force traces from the incorrect responses were similar to the ones from correct responses.
32
.~_
11
1
1
·
F
0
U-
2
Time (Sec)
Figure 2-6: Force traces from subject CH during a 11-2AFC discrimination run under normal
condition.
S/R: soft/soft --- cher1cr1.fn2
S/R: soft/hard --- cherlcrl.fn2
^A
15
a)
0
0
U-
5
0
0
^^
0.5
1
1.5
2
Time (Sec)
S/R: hard/soft --- cherlcrl.fn2
0
0.5
1
1.5
2
Time (Sec)
S/R: hard/hard --- cherlcrl.fn2
1.
2_
0
U-
0o
IL
0
0.5
1
Time (Sec)
1.5
2
0
0.5
1
1.5
Time (Sec)
2
Figure 2-7: Force traces from subject CH during a 1I-2AFC discrimination run under normal
condition plotted in the confusion matrix format.
33
S/R:
soft/soft --- chht2cr4.ft2
SS
S/R: soft/hard --- chht2cr4.ft2
t-
JU
25
z-20
) 15
0
LL 10
5
0
0
0.5
1
1.5
2
Time (Sec)
S/R: hard/soft ---chht2cr4.ft2
0
I'l
3U
0.5
1
1.5
2
Time (Sec)
S/R: hard/hard --- chht2cr4.ft2
25
-20
a 15
10
5
0
0.5
1
1.5
Time (Sec)
Figure 2-8: Force traces from subject C
condition.
0
0
2
0.5
1
Time (Sec)
1.5
2
during a 1I-2AFC discrimination run under thimble
We cannot conclude that the subject responded incorrectly due to the force profiles applied.
The presence of finger cot and thimble did not seem to have much effect on the general
shape of the force profiles for subject CH. Figure 2-8 shows the force profiles from an experimental run with the thimble condition during discrimination of the easiest specimen pair for
that condition. Comparing with Figure 2-7 for normal finger, the general shape of the traces
looked about the same. However, the forces used were somewhat higher than those used in
the normal condition.
Different subjects showed quite different force profiles in terms of peak forces used, duration of contact, and consistency. Figure 2-9 and Figure 2-10 show typical force traces from
subject CT and JK under normal, finger cot, and thimble conditions. For subject CT, the
shape of the forces was not as consistent as those of subjects CH and JK. Also, the duration
of contact, about 0.8 sec to 1 sec, was longer than what CH and JK used (about 0.5 to 0.8
seconds). The force profiles exerted on the specimens by subject JK was quite consistent
and the peak forces during each trial were generally higher than that used by the other two
34
I·__i__l_
411111
-
I --
Cond.: Normal, Data: ctfrlcrl.fn2, Specimen Difference: 31.7%, Correct: 83%
sa
0
0.5
1
Time (Sec)
1.5
2
Cond.: Finger cot, Data: ctfr2cr2.fc2, Specimen Difference: 28.4%, Correct: 83%
-1
30
25
a)
U-
20
15
10
5
n
0
0.5
1
Time (Sec)
1.5
2
Cond.: Thimble, Data: ctjt2cr4.ft3, Specimen Difference: 108.0%, Correct: 70%
,,
30
25
Z-20
0
15
U-
10
5
n
0
0.5
1
Time (Sec)
1.5
2
Figure 2-9: Force traces from subject CT during 1I-2AFC discrimination runs under normal(top graph), finger cot(middle graph), and thimble (bottom graph) conditions.
35
Cond.: Normal, Data: jkerlcrl.fn3, Specimen Difference: 13.5%, Correct: 84%
U)
0
0
U-
I
Time (Sec)
Cond.: Finger cot, Data: jker2cr2.fc3, Specimen Difference: 16.7%, Correct: 86%
. n
Mu
30
a 20
U10
10
0
0
A
0.5
,..
1
Time (Sec)
1.5
2
Cond.: Thimble, Data: jkit2cr4.ft3, Specimen Difference: 75.2%, Correct: 69%
30
1 20
L0
U-
10
A
0
0
0.5
1
Time (Sec)
1.5
2
Figure 2-10: Force traces from subject JK during 1I-2AFC discrimination runs under normal(top graph), finger cot(middle graph), and thimble (bottom graph) conditions.
36
subjects.
2.4.2
S-2AFC discrimination
In the S-2AFC discrimination, the subjects simultaneously used the index fingers from both
hands to perform the discrimination. The same three subjects and finger conditions were
used. Again, the purpose of using three finger conditions were to see how different contact
interface conditions affect the performance of the subjects. The purpose of the simultaneous
contact was to reduce the role memory plays, since both specimens were available during the
discrimination. The experiments were conducted in parallel with the 1I-2AFC discrimination
experiments to reduce possible training effects. Since subjects applied forces on both specimens, the analysis on the force profiles could possibly reveal the underlying strategies used
by the subjects for discrimination.
JND results
The JND values for the S-2AFC experiments listed in Table 2.4 were obtained by using the
same pooled data method used for calculating the JNDs for the 1I-2AFC experiments. The
JND values obtained were lower than the 1I-2AFC case under both normal and finger cot
conditions for all three subjects. However, the JND value for the thimble condition was higher
than the II-2AFC case for each of the three subjects.
Analysis of variance (ANOVA) was performed to determine the effects of subjects and
finger conditions and Student's t tests were used to compare the performances from different
subjects under normal and finger cot conditions. There was significant difference between
the subjects at 1% significance level as indicated by the high F ratio from the ANOVA
table. However, the differences between normal and finger cot conditions and the interactions
of subjects and conditions were small. T-test at 5% significance level revealed significant
differences of the mean JND between subjects (CH,CT),(JI(,CT) under both normal and
finger cot conditions. The complete analysis is presented in Appendix C.
Force profiles
The shape of the force profiles used by the subjects as well as the magnitude of the peak forces
are of interest. Figure 2-11 shows the force traces from subject CH during a discrimination run
under normal condition. The upper graph shows the forces exerted on the standard specimen
37
Condition
Normal
Finger cot
Thimble
CH
4.9
3.2
57.9
Subject
CT
8.3
10.4
78.4
JIK
3.1
2.9
56.1
Mean
value
5.4
5.5
64.1
Table 2.4: S-2AFC softness discrimination mean JND (%)
(CR3) whereas the lower graph shows the forces applied on the comparison specimen. Like
the 1I-2AFC experiments, the shapes of force profiles vary from trial to trial. The first 9
trials of that run is showni separately ill Figure 2-12 with the trial number labeled ill tlhe
l)ottom row of upl)per left cornler. Also shown in the upper left corner of each panel are the
softer stimulus location (labeled S) and the response of the subject (labeled R). The solid line
represents forces on the colnparison specimen (the softer one) and the dashed line represents
the forces on the standard. In the first trial, the softer specimen was located on the left hand
side and the subject correctly responded. The moment of contact on the standard specimen
was earlier than for the comparisoll (softer) specimen for trial 1. Some of the peak forces
were about the same for both specinlens (trials 2 and 3) while some were higher on the softer
specimen (solid line, trials 1,4,7,8,9) and others higher on the harder specimen (dashed line,
trials 5,6). The moment of contact Xwas sometimes earlier for the softer specimen and other
times earlier for the harder specimen.
To see whether or not the magnitudes of the peak forces exerted by the two fingers on
specimens were related to the correctness of discrimination, a plot of the peak forces on the soft
specimen versus that on the hard specimen for subject CH under normal condition was shown
in Figure 2-13. Symbols 'o' and 'x' were used for correct and incorrect responses, respectively.
The four panels are for the four different comparison specimens. The differences in objective
compliances for the specimen pairs are shown on top of each graph. The percentage correct
(pooled from 3 runs) and the confusion matrix (labeled CM) of the subject are shown in
the upper left corner. The numbers labeled FsM are the elements of the following forcespecimen-correctness matrix that arranges the correct and incorrect responses according to
whether or not the peak force on the hard (standard) specimen is higher than that on the soft
(comparison) specimen.
38
Cond.: Normal, Data: chdr2cr3.f12, Specimen Difference: 3.0%, Correct: 70%
a)
o
LL
0.5
1
Time (Sec)
1.5
2
0.5
1
Time (Sec)
1.5
2
AA
30
25
20
15
°o
10
5
n
v
O
Figure 2-11: Forces on hard and soft specimens from subject CH during a S-2AFC discrimination run under normal condition.
39
I11I·I--1III-^I^
ICII·ll·l·-_--_l-l^··11_211-·11
.L··-YI--LLIL-YI--L--. --I_^.
·.I__--..I-L-_L1--- -111-·i__i___
30
.
.5. }
chdr2cr3.f12
25 S:. left.. .. . . ....
R: left
20 1
.
I30
sn-
chdr2cr3.f12
25 S: left ..
R: right
20 2
/
15
15
10
10
5
chdr2cr3.f12
5 .S: right.
R: right
2 3
51
1
5
5
I
cc12'
0
0
0.5
1
1.5
2
0
0
f/Y
:
0.5
1
1
1.5
2
" '
25 S: left
R: left
20 4
chdr2cr3.f12
25 * S: left
R: right
20 5 .......
15
15
10
10
chdr2cr3.f12
0
0.5
1
1.5
2
30
-
chdr2cr3.fl2
25 S: left
R: right
2'0 6 - .... .. . - - -- -
....
1
...
- ...
1
........
5
0
0
30
0.5
1
1.5
2
C
D
chdr2cr3.fl2
25 S: right.
R: right
20 7
15 .. ....
0.5
1
..............
0.5
1
1.5
2
chdr2cr3.fl2
25 S: right
R: right
20 9
.....
........
15 .......
I..
15 . .
...
0.5
0
0
30
25 .S: right
.
....
R: left
:
t
20 - .... .. ....... . ...
10 ....
..... ..
10
-0
2
chdr2cr3.fl2
10
0
1.5
0
1
1.5
2
0
0.5
1
1.5
2
0
0.5
1
1.5
2
1
1.5
2
Figure 2-12: Forces exerted on soft (solid line) and hard (dashed line) from the first 9 trials
of subject CH during a S-2AFC discrimination run under normal condition.
40
-
-
-
-
-
-----------
---------·---
-·-----
-·
---·------ ·--
---------·-··-----
Correct
Incorrect
Far.d > Fso t
S1 1
S12
Flard
S21
S22
-
Fsoft
If the objective of the subject was to obtain the same amount of deformation from both
specimens to enable a. discrimination based on the peak force applied to achieve the deformation, then the subject hlad to exert higher forces on the harder specimen pairs and higher
force on the ha.rd specimen than on the soft specimen for a. given pair. Such hypothesis can
be tested by looking at the FsNM matrix and comparing the occurrence of higher forces on
the hard specimen to that of higher forces on the soft specimen. So, wie can sum the first
two numbers of the FsNM matrix which were the number of trials that had higher pleak forces
on the hard specimens an(l compare it, to the sum of the last two numbers which were the
nuiber of trials that had higher peak forces on the soft. specimens. From the matrices shown
in Figure 2-1lt for subject Cli, the numbers from the easiest pair to the most difficult pair
were: (97,95), (94,98). (106,86), and (111,81).
For subject CT, plot. shown in Figure 2-14, the opposite was observed.
The numbers
were (75,117), (81,111), (84,108), and (98,94) from the easiest to the most difficult pairs.
These numbers indicate that the subject used higher forces for the softer specimens than for
the harder specimens in a. given pair. This would be consistent with a different hypothesis,
na-mely that the subject was trying to obtain the same amount of pressure from the two
specimens. As will be shown in contact visualization, for a. given force, the percentage contact
area inside the contact region is lower for harder specimens. Thus, the actual pressures for
the harder specimens are higher than those for the softer specimens. To obtain the same
amount of pressure, therefore, the force on the softer specimen should be higher than that on
the harder specimen. As the difference between the two specimens got smaller, the applied
peak forces also got closer for this subject.
For subject J,
it is completely different from the other two subjects. Unlike the plots
from subjects CH and CT which had data points clustered around the 45 degree line (the
two forces did not differ much), the data points separated into two clusters as shown in
Figure 2-15. When the difference between the specimen pair was large (16.2% difference),
the degree of separation of the two clusters was small.
For the most difficult pair (3.0%
difference), the degree of separation was largest. Also, subject JIK used peak forces that
were much higher than the other pairs and saturated the input of the data acquisition system
41
-------I1CI-l
--
IXI-LI
IIIIC-lle-.lllsl-XIY··IYI---·L1·LI--
·-II·I-LUL-_I
-LI·----II-I-·_--YI--Y--·Il-Lllllllllllli--
near 42N. If we look at the upper cluster of the 3% difference specimen pair, most of the
peak forces exerted on the harder specimen were within the range of 22N to 33N while most
of the peak forces on the softer specimen were more than 40N. The numbers from the FsM
matrix from easier to difficult specimen pairs were: (95,97), (96,96), (96,96), and (96,96).
It was very consistent, but did not fit either of the two hypothesis so far. This suggests a
third hypothesis, namely that the subject was trying to exert the same amount of force and
compare the contact information obtained in order to discriminate. If the subject was indeed
trying to exert the same force on the two specimens, the fact that Figure 2-15 showed dlata
points in two clusters could mean the subject had a different sensation of force on the two
fingers. So, if we plot the peak forces according to hands instead of according to specimens.
the data. points should be clustered near the hand which used higher forces. Figure 2-16
shows that subject JIK used higher forces from the right hand for the three specimen pairs
that are more difficult. The definition of the FhMI
matrix is similar to FsNM matrix as shown
below:
Correct
Incorrect
h21
IL21
/12
1122
Fr.ight > Fleft
Frtight _<Fleft
For this subject, summing of the rows of the FhM matrix in a. manner similar to that
done for FsM above gives (192,0), (192,0), (192,0), and (191,1). These results clearly show
that this subject almost always applied higher forces with the right hand.
2.5
2.5.1
Discussion
Effects of finger conditions
The information available to the subjects for softness discrimination under the three different
finger conditions was not the same. With normal finger, the subject had detailed tactile as
well as kinesthetic information. When the finger were covered with a thin rubber finger cot,
the subject could still feel the surface of the specimen but the minute finger ridge level details
were degraded.
The presence of finger cot acted just like another low-pass filter for the
mecha noreceptors underneath the skin which originally receive information already filtered
by the skin. When the finger had a rigid thimble on, the deformation of the fingerpads depend
only on the interaction force with thimble, and not on the specimen compliance. Thus, the
42
I _I___·q_
_
_·^_______·_IPIII___I1X··-L
--1I--1_1I-I^_I
-·.-··.l-llll)_l-L*·
I --- _LII·-Llrl*I-I--··l·W·l·l·-·l
Data: chdr2cr3.fln, Spe. Diff.: 3.0%
Correct(%): 74
z40 CM: 72/24/25/71
FsM: 81/30/62/19
Data: chdr3cr3.fln, Spe. Diff.: 6.7%
Correct(%): 76
... .... .
'40 CM:- 72/24/2274
FsM: 76/30/70/16
40
30
o20O
Lco
C)30
o 20 ....
o10
LL
a3)
0.10.
10
20
30
40
Peak Force on Hard (N)
Data: cher3cr3.fln, Spe. Diff.: 16.2%
10
20
30
40
Peak Force on Hard (N)
Data: chfr3cr3.fln, Spe. Diff.: 28.1%
Correct(%): 91
CM:- 86/10/ 8/88
FsM: 86/ 8/88/10
'40
Correct(%): 98
CM: 96/0/3/93
FsM: 94/3/95/0
o
o
0
v
c 30
30 I
30
0
0
a)
o 20 I
'
'',
.414, I
. 20
'
LI-
a )
a)
10
.
10
I,
.
20
30
40
Peak Force on Hard (N)
10
20
30
40
Peak Force on Hard (N)
Figure 2-13: Peak forces on soft versus hard specimens for subject CH under normal condition.
Data: ctdr3cr3.fin, Spe. Diff.: 6.7%
Correct(%): 65
z'40 CM: 73/23/44/52 FsM: 59/39/6628
Data: cter4cr3.fln, Spe. Diff.: 12.2%
Correct(%): 82
z40 CM: 76/20/14182 ..
FsM: 63/21/95/13
.
o
c0
° 30
c 30
0
0
,O
· · · ~· o0
o
o20
. ....
.. ... ..
.0....
........ .....
a)
o
.....
a)
L 10
10
.
.
.
.
.
10
20
30
40
Peak Force on Hard (N)
Data: cter3cr3.fin, Spe. Diff.: 16.2%
Correct(%): 83
z'40 CM: 80/16/17/79FsM: 64/17/95/16
0
v0
....... .......
c, 3
c 1o
20
30
40
Peak Force on Hard (N)
Data: ctfr3cr3.fln, Spe. Diff.: 28.1%
Correct(%): 92
z'40 CM:- 86/10/5/91 ....
FsM: 65/10/112/5
0
........
0
O.O .
20
. ...
.....
L1
O
10
.
10
C
:
20
30
40
Peak Force on Hard (N)
30
.... .... ....
...............
...
20
10
10
10
20
30
40
Peak Force on Hard (N)
Figure 2-14: Peak forces on soft versus hard specimens for subject CT under normal condition.
43
-
"""
'-'-----'-^--
---
--·-
-·---------·--·----
·---
Data: jkdr2cr3.fln, Spe. Diff.: 3.0%
Data: jkdr3cr3.fln, Spe. Diff.: 6.7%
. ..
40
.
.. ..
.
... .......
.. . .
z40
o
.. ... .. ....
C 30
, 30
0
a,
20
0 20
LL
10
o 10
0
a,
-...........
.........
............
0 20
U-
Correct(%): 79
CM: 67/29/1 2/84FsM: 84/12/67/29
10
20
30
40
Peak Force on Hard (N)
Data: jker4cr3.fln, Spe. Diff.: 12.2%
a)
10
Correct(%): 84
CM: 76/20/10/86
FsM: 86/10/76/20
10
20
30
40
Peak Force on Hard (N)
Data: jker3cr3.ftn, Spe. Diff.: 16.2%
z40
0
" 30 ..-
cn 30
0
o
a,
o· 0
o 20
a,
L 20
t 20 .
IL
LU-
a_
Correct(%): 96
a_10 CM: 8917/ 096 ....
FsM: 95/ 0/90/7
10
20
30
40
Peak Force on Hard (N)
Correct(%): 93
10 CM:- 83/13/ 0/96
FsM: 96/ 0/83/13
10
20
30
40
Peak Force on Hard (N)
Figure 2-15: Peak forces on soft versus hard specimens for subject JK under normal condition.
Data: jkdr2cr3.fln, Spe. Diff.: 3.0%
40
Data: jkdr3cr3.fin, Spe. Diff.: 6.7%
40
......
.............
....................
).
:...
....
.. ...
-J
30
c 30
0
a)
O
U)
20
a) 20
U_
Correct(%): 79
a 10 CM: 67/29/12/84 ..... ........
FhM: 151/41/0/0
10
20
30
40
Peak Force on Right (N)
Data: jker4cr3.fin, Spe. Diff.: 12.2%
(1
a 10
40
z^40
-J
-J
0
0
a,
' 30
a)
aC
Correct(%): 93
a 10 Ct:. 83/13 0/96
FhM: 179/13/01O 0
10
aa 10
. ....
..........
....
............
:
Correct(%): 96
CM:-89/7/0/96 .FhM: 184/7/1/0
20
30
40
Peak Force on Right (N)
....
30
o 20
20
Correct(..........: 84
-CM. 76/20/10/86 ..
FhM: 162/30/ 0/0
10
20
30
40
Peak Force on Right (N)
Data: jker3cr3.fln, Spe. Diff.: 16.2%
....
:
10
20
30
40
Peak Force on Right (N)
Figure 2-16: Peak forces on left versus right specimens for subject J
44
under normal condition.
subjects' sense of object softness will have to come mainly from the kinesthetic information.
Because all the experiments involved active touch, the motor commands used during the
discrimination were also available to the subjects in all conditions.
In both 1I-2AFC and S-2AFC experiments, the presence of the thimble degraded the
performance of all three subjects dramatically. The general shape of the force profiles looked
similar to the ones from other conditions. However, the subjects were not able to discriminate
the specimen pairs at the level they had achieved under normal or finger cot conditions.
Therefore, even though the subjects were able to control their forces successfully to produce
similar force profiles, the absence of useful tactile information from lack of direct contact
with the specimens radically degraded their ability to discriminate.
Analysis of variance, detailed in Appendix C, did not show significant difference between
the JND results obtained under normal and finger cot conditions. This implies that Inissing
the detailed information from the ridge level mechanics of contact was not severe enough to
degrade the softness discrimination performance as indicated by the JND results.
In summary, by comparing the softness discrimination results from the three different
conditions, we see that tactile information was crucial for the softness discrimination based
on the poor performance with the thimble. The fact that the presence of finger cot did not
significantly affect the result of discrimination suggests that the information from the fine
finger ridge level mechanics of contact was not crucial for these experiments.
2.5.2
Effect of experimental paradigms
The main difference between the two experimental paradigms is the information available
to the subject. In the S-2AFC case, both specimens were available to the subject during
the discrimination. In the 1I-2AFC case, however, subjects had to remember how the other
specimen felt like in order to come up with a correct response.
The ,JND values obtained from S-2AFC paradigm under both normal and finger cot
conditions were smaller for all three subjects. This is consistent with our expectation since
the subjects had information from both specimens during a trial and thus it was an easier
task. The ANOVA analysis in Appendix C indicated that the JND data obtained from the
two paradigms are significantly different at 1% significance level.
From the box plots of the JND data from the two paradigms for all three subjects under
both normal and finger cot conditions given in Appendix C, the variations of the data from
45
the S-2AFC experiments were smaller than those from the 1I-2AFC experiments. We cannot
treat the results from the one-interval S-2AFC experiments just like a traditional 2I-2AFC
experiment. The improvement in performance from these experiments under both normal and
finger cot conditions most likely should be attributed to the elimination of the 'role memory
played in the discrimination.
For the thimble condition, the S-2AFC performance was worse than the 1I-2AFC case.
This result was iiot surprising since the subjects had no direct contact with the specimens (no
useful tactile information) and the remaining information is from the kinesthetic sense and the
knowledge of motor comllmanlds executed. Any tactile information received could potentially
be misleading since the fingers were contacting the thimble, not the specimens. To control
two fingers carefully and at the saime time to ignore the mnisleading tactile information would
seem like a tougher job for subjects and it showed up as degraded performance.
2.5.3
Force profiles
The force profiles used by subjects during the discrimination varied across subjects and trials.
They were in general bell shaped curves with typical contact durations between 0.5 sec to 0.8
sec for subjects CHI and JIK. For subject CT. the contact was longer and ranging from 0.8 sec
to 1 sec. The profiles did not seem that different under finger cot and thimble conditions. The
peak forces exerted on the specimens by the subjects had a wide range, generally between
10N and 40N. Higher forces were used by subject JIK during the discrimination.
The force profiles exerted on the two specimens looked similar in the S-2AFC experiments
with two fingers. If they were identical, the subject might be able to discriminate based on
the resulting deformation of the fingers. However, if the force profiles from the two fingers
differed such that the resulting deformation of the two fingers were the same, then the subject
would have a hard time discriminating. For example, if higher force rate was exerted on the
harder specimen and lower force rate exerted on the softer specimen, the deformation of the
hard specimen may be similar or more than that of the softer specimen. In that case, the
subject might make mistakes.
A longer contact duration would mean lower force rates and if that information was used
during the discrimination then it would explain why the performance of subject CT was not
as good as the other two subjects.
46
2.5.4
Possible softness discrimination mechanisms
If we were to design methodologies for a robot to use its fingers to determine the compliance
of an object, we can have strategies that utilize force and displacement information. In the
force based strategy, the displacement can be held constant by pushing against an object to
a certain deformation. The force developed during the contact can be used to calculate the
compliance of the object. On the other hand, the robot can push against the object until
a. certain ma.ximum force is reached. In that case, the robot finger position profile together
with the forces a.t every instant can be used to determine the object compliance.
In humlans, investigating the underlining mechanisms is more complicated. If we just look
at the force profiles from the 11-2AFC discrimination experiments, we would be lost even if
wve break down the trials according to the stimuli presented and the responses given by the
subject (see Figure 2-6). Althougll the shape of the force profiles was very consistent, the
pealk forces exerted on the specimens by the subjects varied from trial to trial and had a wide
range, generally between 10N and 40N. Also, the duration of contact varied from trial to trial
but generally ranged from 0.5 sec to 1.0 sec. It would not be easy, if at all possible, to see
the underlying softness discrimination strategies used by the subjects from the 1I-2AFC force
profiles. However, it did confirm that tactile information, degraded(finger cot condition) or
not(normal condition), was important for the tasks and that each subject's ability can be
significantly different from the others.
By looking closely into the peak forces in the force profiles used by the subjects during
S-2AFC experiments, it seems quite likely that the subjects were using different strategies
(see S-2AFC results). For subject CH, the trend was to exert higher forces on the harder
specimens.
This would be consistent with trying to obtain the same amount of contact
information (through deforming the specimens) from both fingers and thus harder specimen
requires higher peak forces.
softer specimen.
For subject CT, the trend was to use higher forces on the
The strategy might be trying to apply the same amount of pressure on
the specimen. For softer specimen, higher peak forces were needed because the percentage
contact area inside the contact region was higher (see Contact Visualization chapter). Subject
JIK used a strategy based on exerting equal amount of force on both specimens. However,
subject J
exerted very different forces from the two fingers which suggested that the brain
also needs to compensate for such differences to make correct discrimination.
47
__1_1__4
1
__I__
The lowest JND values obtained from these experiments were about 3% by subject JK
during S-2AFC discrimination under both normal and finger cot conditions. If force, displacement, or their combination were the only cues used, such small JND number would not
be possible since the available literature report higher JND values for those physical ploperties (see Introduction). However, the JND values reported by other researchers might have
ineitable memory effects depending on the para(ligms used. On the other hand, the subject
could also be using other types of information to achieve the discrimination. Even though tlhe
forces and strategies used were very different for all subjects, the percentage contact area iside the contact region were higher for softer specimens (see Contact Visualization chaplter).
The subjects could be using the spa.tio-temporal pressure distribution to discriminate the
specimens. In that case, the finger ridge level details under the finger cot condition might not
be very important and the absence of useful tactile information in thimble condition would
have a big impact on the JND results.
2.5.5
Important factors in discrimination
In a. general discrimination task, our ability to discriminate relies on sensing, control, and
cognition. It is only by conducting experiments under carefully designed conditions that the
relative role played by each component could be understood.
In the softness discrimination tasks reported here, the finger condition was a key factor
that had significant effect on the performance. Without the presence of useful tactile information, the task was difficult as shown by the poor thimble perforrnance. The finger ridge
levei details of mechanics of contact, however, did not seem to be important in the softness
discrimination tasks examined here as shown by the excellent performance of subjects under
finger cot condition. A reasonable explanation lies in the fact that the mechanoreceptors
are underneath the skin and receive only low-pass filtered signals. The presence of the thin
(0.06mm) finger cot did not seem to change the input to the receptors much.
By conducting S-2AFC experiments, we had an opportunity to examine the underlying
strategies used by subjects and also effectively reduced the role memory played in the discrimination. The peak force data suggested three different strategies used by three different
subjects: to obtain the same amount of deformation, to apply the same amount of pressure,
and to apply the same amount of force. No matter which strategies were used by the subjects,
the coordination between sensing, control, and cognition seems to be important for successful
48
discrimination.
49
----------- _·
_
Chapter 3
Force Control
3.1
To study
Abstract
the ability of humans in controlling the forces of contact applied by the finger-
pads, constant normal force control experiments were conducted under several experimental
conditions. The experimental parameters were finger contact interface conditions, specimen
softness, target normal force magnitude, availability of visua.l feedback, and the fingers from
the left or right hand of the subjects. Three finger contact interface conditions were tested:
normal finger, finger covered with a finger cot, and finger covered with a rigid thimble. Four
different specimens were used: a rigid Plexiglas and three transparent silicon rubber specimens with different compliance values. Target normal force magnitudes of 2N, 4N, and
N
were used. The experiments consisted of controlling forces during three stages, 5 seconds
each, of force feedback: tracking with numerical force display, tracking with graphical force
display, and maintaining target force without visual feedback. The numerical feedback stage
was used to help the subjects to exert forces close to the target, and therefore the performance was not analyzed; only the data from graphical feedback stage and the maintaining
stage were analyzed. Index fingers from both the left hand and right hands were tested. The
statistical tests on the data collected indicate that the finger contact condition as well as the
specimen softness did not have significant effects on the results. Not surprisingly, when there
was visual force feedback, the error was smaller than without feedback for all the subjects.
For two subjects, the percentage error increased from less than 2% at SN target with visual
force feedback to about 4% and 6% without visual force feedback, respectively. For the other
subject, the increase, from 2% to 11% at SN, was more dramatic. The subject who had the
50
-1·----1111
·--
II-
I
-·--- _
highest error without visual feedback was the same one who had higher JND values (less
able to discriminate) in the softness discrimination experiments. In both stages analyzed, the
tests on the handedness showed that there was a significant difference between the results
obtained for the two hands of one of the subjects who also consistently showed han-ldedness
during softness discrimination experiments.
3.2
Introduction
The interaction of human hands with objects involves both sensing and control of the contact
interface. The human abilities of tactual perception and manipulationl are delpendent on the
lIal)tic systemi, consisting of tile imechlanical, sensory, motor, and cognitive sublsystems.
ac-
tual sensory information conicerning contact with an object can be divided into lthree classes:
(1) tactile information, referring to the sense of the type of contact. with the oblject as well as
some of the physical properties of the object, mediated by the responses of receptors inlerating the skiln within and around the contact region; (2) kinesthetic information, referring to
the sense of position and motion of body segments along with the associated forces, conveyed
b)y the sensory receptors in the skin around the joints, joint capsules, tendons, and muscles:
(3) neural signals derived from motor commands. The motor subsystem complements the
sensory system by enabling control of body postures and motions together with the forces of
contact with objects.
In performing manual tasks in real or virtual environments, contact force is perhaps the
most important variable that affects both tactual sensory information and motor performance.
\'hen the hand is actively pressed against an object, the contact forces are sensed b
both
the tactile and kinesthetic sensory systems. The Just Noticeable Difference (JND) in contact
force is about 7% over a wide range of conditions involving variations in force magnitude,
muscle system and experimental method, provided that the kinesthetic sense is involved
in the discrimination task (Pang et al[33]).
In closely related experiments consisting of
distinguishing among different weights of objects, a slightly higher JND of about 10% has
been observed (see reviews by Clark and Horch [8] and Jones [25]). In experiments involving
grasping and lifting of objects using a two-finger pinch grasp, Johansson and NWestling [22]
have shown that subjects have exquisite control over maintaining the proper ratio between
grasping and lifting forces (i.e., the orientation of the contact force vector), so that the objects
51
-11_11111
·_.1-. .IIIII-I
·..
Itlll
I_--_
--
do not slip. However, when tactile information was blocked using local anesthesia, this ability
deteriorated significantly because the subjects could not sense contact conditions such as the
occurrence of slip, and hence did not apply appropriate compensating grasp forces. Thus,
performance in tasks involving contact require sensing of appropriate forces as well as using
them to control contact conditions. Srinivasa.n and Chen [39] measured the human abilities to
control the norma.l forces of contact exerted by the fingerpad on rigid objects under a. variety
of experimental conditions and found that performance degraded significantly in the absence
of tactile information (by using local anesthetized fingertips) and visual feedback (by using
a.n ee mask).
The goal in this study was to measure the human abilities in controlling normal force of
contact applied by the fingerpad on objects of various softnesses under several experimental
condlitions. Three contact interface conditions were used to study the effect of altered tactile
illformation on force control performance. The results of control with visua.l feedback was
compared with those without visually feeding back the applied forces to the subjects. The
same experiments were performed on index fingers from both hands of three subjects. The
absolute error between the target force and the forces exerted by the subjects were averaged
over three trials as a measure of human performance. In addition, the effect of performances
under various conditions were compared using analysis of variance (ANOVA).
3.3
3.3.1
Methods
Experimental setup
The same setup used for the softness discrimination experiments was used for the force control
experiments in order to study the abilities of humans in controlling normal forces of contact
with specimens of different softness. An illustrative diagram of the experimental setup is
shown in Figure 3-1.
The soft specimens(see Softness Discrimination Methods) were mounted vertically inside
one of the specimen holders depending on the finger being tested. The rigid specimen was
mounted on top of the specimen holder. The soft specimens fitted nicely tight in the specimen
holder and could also be taken out without too much effort. To record the forces exerted on
the specimens, a pair of custom made binocular force sensors, sufficiently stiff (see Softness
Discrimination Methods) and not sensitive to the location of load application were interfaced
52
___·II^_II__^_IIII
.-ll*-C----
11_I1.I_·
Figure 3-1: The force control experimental setup.
to an analog to digital (A/D) conversion board in a. 80486 personal computer. The forces
exerted onl the specimens were displayed differently in each of the three 5-second experimental
stages during each run. The force data. as well as the force display were updated at a rate
of 200 samples per second. The stepper motor was controlled through digital input/output
(1/0) port and was energized to hold the specimen at a vertical configuration during the
experiments. The subjects were sitting comfortably in front of the computer monitor with
their elbow rested and hands grasping the fixed rods provided for controlling hand posture
during the experiments, as shown in Figure 3-2 for left and right hands.
3.3.2
Experimental parameters
The five experimental parameters used were contact interface conditions, specimen softness,
target normal force magnitude, visual feedback availability, and the fingers used for experiments. The same three subjects who participated in the softness discrimination experiments
were used for tests on all parameter combinations.
In order to determine the relative importance of tactile feedback in controlling the contact
53
IIYI-· 1__411_1111_____II-.--
----
II--·--YLI--I
·-
-I
I
I__
II
Specimen
Holder
Posture
Rod
/¼
Force
Sensor
D-
]
Figure 3-2: Relative positions of the finger and the specimen for experiments on left and right
index fingers.
54
---IY-·-LL
.
--__1I_^II_----_---
..VIII^ II I sl-
- I- ---
------
force on the fingerpad, the tracking experiments were conducted with the subject's finger
under normal condition (both tactile and kinesthetic information available to the subject),
finger cot condition (fine finger ridge contact information is degraded by the thin rubber
finger cot). and thimble condition (the tactile information is derived from fingerpad contact
with a rigid thimble instead of direct fingerpad contact with the specimens).
Four different specimens were used: a. rigid Plexiglas plate and three transparent. silicon
rubber specimens with different softnesses. The soft specimens were cast by mixing different
proportions of General Electric (GE) SF96-50 silicon rubber diluent to fixed proportions of
GE RT6'G15A and RTV615B components. An objective measure of the specimen softness
was measured by using a, linear stepper motor system with incro-stepping drive to indent the
specimen at a constant velocity of 0.5 mm/sec with the flat circular end of a 1/4 inch cliameter
cylindrical probe. The characteristic force-displacement relationship of the specimens \\as
linear(Figure 2-1).
The three specimens chosen had objective compliance of 0.304nlin/N
(hard). 0.455m1m/N (medium), and 0.608mm/N (soft). The variability in these compliance
measurement was only ±0.001mm/N.
Target normal force magnitudes of 2N, 4N, and SN were used as one of the experimental
parameters. Although 8N was not as high as the peak forces generally applied by the subjects
during tasks such as softness discrimination, it was close to the maximum constant force that
subjects could apply and still be comfortable after repeated experiments of 15 seconds each
for an hour. The other two reference force magnitudes were used in order to determine how
the performance varied with target force magnitude.
The experiments consisted .of applying and controlling forces with.the fingerpad for 15
seconds under three stages of force feedback: tracking with a numerical force display, tracking
with graphical force display, and maintaining target force without visual force feedback.
Subjects began the force application in each trial without any external triggering signal.
During the first 5 seconds, the force used by the subjects was displayed on the screen as a
number(unit:N). During the next 5 seconds, the display changed to a graphical display. A
horizontal bar extended out from the right(left) edge of the screen was shown in the middle
of the monitor and ended at a distance from the center which was proportional to the force
error for trials using right(left) hand. The subjects were instructed to try and maintain the
end of the force display bar to be as close as possible to the fixed target line drawn vertically
in the middle of the monitor. During the last 5 seconds, the graphical display of the contact
55
·------I---
--··------
*-·r.Llls-
II11..
1·---···--·_-----·^1-111
1_-·-1--·..-1^
11111__11_1·_.-
1
--
I
force was deactivated and the bar displayed did not change according to the force applied.
Subjects had to maintain the target force based on their manual feel of it. The display of the
forces during these three stages are illustrated in Figure 3-3 for both fingers.
In the real world, we manipulate objects with fingers from both hands. To investigate
whether or not there is a significant difference in the control of forces for fingers from the
two hands, the same tests were conducted for the index fingers from both the dominant and
non-dominant hands.
3.3.3
Experimental procedures
Since there are too Imanyl parameters for the experiment to be randomized between paramleters. the experiments were conducted with a fixed parameter sequence. The experiments on
tilhe two different fingers were conducted in two different sessions. The parameter of force
feedback method was varied during the stages of each experimental run. The other three
parameters were varied in the following way. For each specimen tested, the finger contact
interface conditions were varied first. Under each finger condition, the target force was varied from 2N to 4N and finally 8N. The same three subjects tested for softness discrimination
repeated the force control trials at each target force level three times.
Before a session started, the subjects were given practice runs with both hard and soft
specimens until the procedure was familiar. Each subject was seated so as to comfortably
press his/her index finger on specimens attached to the force sensor. The posture rod in
front of the specimen 'provided a good reference position for the subject's hand and finger
during the experiments. At the beginning of each trial a target force was shown as a iumber
in Newtons on the monitor and the subject was also informed by the experimenter about
the target force magnitude. The subject started the indentation on his/her own without any
external triggering signals. The control program written in C language had a circular buffer
that waited for the moment of contact to happen before it started logging the force data.
After the subject exerted significant amount of force (0.5N) on the specimen, the trial began.
During the first stage, the applied force was displayed in numerical format near the left or
right side of the screen depending on whether the finger from the left or right hand was
involved in the experiment. The first stage, which lasted 5 seconds, was needed to help the
subject get to the target force level. During the second 5 seconds, the force was fed back to
the subject through graphical force display as described before. A bar started from the sides
56
I
-^-I·l-··-·LII-ll.-··11111
-
^---·--- II
----
4.20
7.95
(L-l)
(R-1)
. l_
(L-2)
(R-2)
(L-3)
(R-3)
Figure 3-3: Contact force display during the three stages of force control experiments for left
and right hands.
57
.^"1~~-'"1111~"-^L--ll-lllll
1-^----·11_--s1·11__-
--
---1
--
of the screen and approached the center of the screen as the subjects exerted forces closer
to the ta.rget magnitude. After some pilot experiments, the range of the entire display was
chosen to be half of the target force range during the graphical feedback stage. The screen
resolution was set to VGA mode with 640 by 480 pixels.
or the low force target (2N), each
pixel corresponds to about 0.0016N. At high target force (N),
the force display resolution
was abl)out 0.006:3N per pixel. Such high force disl)lay resolution should allow tile subjects
to see the force difference clearly. During the final stage. the graphical bar occupied ha.lf the
screen and remained the same irrespective of the forces exerted by the subjects. In this stage,
the subject was instructed to maintain the target force for 5 seconds based on memory. After
the periodl ended, the screen changed back to the iitial state for the next run.
3.3.4
Data analysis
Several mlleasures of' the force error between the target, force ad the forces exerted by the
subjects were computed: (1) the standard leviation from the mean force exerted; (2) the
absolute error with respect to the target force; (3) the absolute error expressed as a. percentage
of the target force. The results described below are given in terms of the absolute errors. The
force data. sampled a.t 200 samples per second were filtered with a. low-pass filter that had a.
cut-off frequency of 50Hz for noise removal before the force error were calculated. The mean
absolute error and the pooled standard deviation [24] were tabulated. Also, only data. from
the second and third stage of each run were analyzed. The analysis of variance (ANOVA)
[31][24][36] was used to find out whether the results were significantly influenced by various
factors. The data averaged from three individual trials under each experimental conditions
were used for the calculations of the ANOVA table. The statistical analysis was performed
by using MATLAB statistics toolbox. The results from different subjects were not averaged
in order to observe their differences.
3.4
3.4.1
Results
Force profiles
Typical force exerted by the subjects during the experiments are shown in Figures 3-4, 3-5,
and 3-6. The rows of panels are force traces on different specimens whereas the different
columns are for different finger conditions. Three force traces are shown in each panel for
58
- ---l-L-l
I-----·I·LLI^I*----_^.l·^·ll·-L------
II
-
the three target forces used. Any force variations at frequencies greater than about 50 Hz
are removed by low-pass filtering the recorded force data.
Visual inspection of the data suggests that the differences between data obtained from
different specimens are similar. The tracking force from the second stage (.5 to 10 seconds
from the start) of each run was quite close to the target, especially for the two loNw force
targets. H-lowever. the last. stage (10 to 1.5 seconds from the start) of the force traces seemed
to have Iore variability dlue to the fact tha.t no visual force feedback was given. IFor examl)le,
in Figure 3-4, the forces exerted by subject CH on the rigid specimen dropped considerably
during the third stage under finger cot condition.
For subject CT, the visual inspection
on some trials shown in Figure 3-5 suggested that the data from the third stage (without
visual feedback) were considerably different from the second stage (with graphica.l visual
feedback). In almost all the 8N target trials, the force traces during the third stage dropp)ed
byv a noticeable amount, sometimes mnore than 2N (25%). This visual inspection suggested
that the subject CT had difficulty maintaining constant force without visual feedback. For
subject JIK, force traces from the third stage also shows considerable deviation from the target
force, but were not as severe as those observed for subject CT.
Although the error distributions obtained from the force traces would depend on particular
trials, there was a distinct difference between the distributions obtained from the second and
third stage for most trials. Shown in Figure 3-7 are distributions of error and absolute error
for stage 2 and stage 3 of a. typical run. The error distribution for the second stage was
However, the error
typically shaped close to a normal distribution centered around zero.
distribution for the third stage was usually not centered around zero. The corresponding
absolute error distributions were shown in the bottom two panels. For trials with continuing
drift in the third stage, the error distribution would be quite flat and distributed on one side
of zero (see Figure 3-8).
3.4.2
Performance measurement
Due to the large number of experimental parameters involved, a single table which contains all
the performance data is not possible. Instead, the results have been grouped by the following
three factors: subject, visual feedback availability, and the hands used.
The performance
measurement using absolute errors for each subject under various experimental parameters
are given in Appendix E.
59
1___1_
IIIIIIII·IIYIC1
·I- ·III^·XI---YI--1I
11-(1-3111_
·-- -.- C
Subject:CH Hand:R Trial:1
8
0)
a,
4
0
o
lL
2
5
10
10
5
Time (sec)
15
8
15
5
10
15
.
8
0
4
I
2
2
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
Thimble
15
8
I
E
0
a)
2
4
2
5
10
15
8
8
8
N
0 4
4
4
2
2
(In
2
5
10
Normal
15
5
10
Finger cot
15
Figure 3-4: Typical force versus time traces for subject CH under different finger conditions
on various specimens
60
Subject:CT Hand:R Trial:1
8
.)
0
4
0
U-
2
5
P
10
15
8
8
4
4
2
2
5
10
Time (sec)
15
5
10
15
5
10
15
I
5
10
15
5
10
15
5
10
15
5
10
15
8
I
E 4
a
2 2
8
Ico
2
5
10
Normal
15
5
8
8
4
4
2
2
5
10
Finger cot
15
5
10
Thimble
15
Figure 3-5: Typical force versus time traces for subject CT under different finger conditions
on various specimens
61
Subject:JK Hand:R Trial:1
cO
cc1
a)
0
U-.
5
10
15
5
10
Time (sec)
15
5
10
15
8
c.
4
I
l
4
2
-
2
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
Thimble
15
I.
E
:3
a,
F-
I
(I)
II
5
10
Normal
15
5
10
Finger cot
15
Figure 3-6: Typical force versus time traces for subject JK under different
finger conditions
on various specimens
62
Stage: 2
Stage: 2
--zuu
Stage:
3
Stage: 3
·
_
150
C
O100
50
50
- -
-0.1
r-.1
n i
-0.05
!
0
Error (N)
Stage: 2
H
0.05
0
fIr
0.1
5
Error (N)
Stage: 3
n,5
150
c
C
o 100
0
0r,
50
A
vU
0
0.05
Abs. Error (N)
0.1
0
0.05 - 0.1
0.15
Abs. Error (N)
0.2
Figure 3-7: A typical error and absolute error distribution for the two stages of an experimental run from a trial conducted on rigid specimen with 2N target force under normal
condition by subject CH.
63
Stage: 2
Stage: 3
Scn
300
IDU
250
200
100
:3
0
)
§ 150
100
50
50
n
-0.6
-0.4
nrn
-0.2
Error (N)
Stage: 2
0
0
-1.5
0.2
-1
-0.5
Error (N)
Stage: 3
C
0.5
1
Abs. Error (N)
1.5
150
D3U
200
100
150
c
:3
0
0
o 100
O
50n
50
n
n
0
0.2
0.4
0.6
Abs. Error (N)
0.8
0
Figure 3-8: A typical error and absolute error distribution for the two stages of an experimental run from a trial conducted on rigid specimen with SN target force under normal
condition by subject CH.
64
-
-
-
_--
-
Condition Force
Normal
2N
Normal
4N
Normal
8N
Finger cot
2N
Finger cot
4N
Finger cot. SN
Thimble
2N
Thimble
4N
Thimble
SN
Rigid
Mean S.D.
0.035 0.028
0.054 0.040
0.093 0.077
0.051 0.046
0.070 0.054
0.165 0.122
0.05-7
0.045
0.048 0.041
0.128 0.087
Absolute Error (N)
Hard
Medium
MIean S.D. Mean S.D.
0.063 0.046 0.030 0.028
0.030 0.023 0.056 0.043
0.061 0.047 0.128 0.106
0.037 0.031 0.032 0.028
0.035 0.027 0.049 0.037
0.100 0.089 0.108 0.093
0.057 0.042 0.030 0.024
0.032 0.026 0.060 0.052
0.098 0.059 0.066 0.053
Soft
Mean S.D.
0.036 0.031
0.067 0.051
0.073 0.064
0.035 0.035
0.057 0.037
0.160 0.129
0.041 0.034
0.042 0.030
0.110 0.077
Table 3.1: Absolute error in force control for subject CI using right hand index finger witl
visual feedback.
The tables for the three subjects when visual feedback was present and the right hand
was used are shown here in Tables 3.1, 3.2, and 3.3. The mean absolute error was obtained
by averaging the mean absolute error of the three experimental runs, with the same number
of samples, under the same conditions. The standard deviation (s) was obtained by pooling
the standard deviations from the three experimental runs (sl, s2, and
formula: s
= V(S12 +
2 +
2
3
S3)
using the following
)/3.
The performance of all the subjects with the softest specimen when using the right hand,
with and without visual force feedback are listed in Tables 3.4 and 3.5. With visual force
feedback, the mean absolute error of the three subjects did not differ much given the large
variations in the standard deviation. However, without visual feedback, the performance of
subject CT is seen to deteriorate more than the other two subjects in most of the conditions.
3.4.3
Statistical tests on experimental parameters
The analysis of variance (ANOVA) was used to find out whether the force control performance was influenced by parameters such as finger contact conditions, specimen compliance,
target force magnitude, visual feedback conditions, and the hands used. Data collected using
different parameters were grouped together whenever possible for more reliable tests. The
complete analysis is presented in Appendix F and the main results are summarized here.
The effects of both specimen softness and finger contact conditions were examined together
by using two-way ANOVA table. The data for the three target force magnitudes were grouped
65
."-"
.
-
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
SN
2N
4N
SN
Rigid
Mean S.D.
0.034 0.043
0.066 0.048
0.147 0.102
0.025 0.031
0.071 0.053
0.1.88 0.114
0.041 0.032
0.074 0.065
0.142 0.104
Absolute Error (N)
Hard
Medium
Mean S.D. Mean
S.D.
0.066 0.043 0.043 0.028
0.080 0.060 0.079 0.058
0.078 0.063 0.098 0.062
0.036 0.032 0.030 0.019
0.171 0.149 0.065 0.045
0.099 0.051 0.172 0.114
0.027 0.019 0.028 0.024
0.082 0.072 0.048 0.033
0.139 0.152 0.136 0.093
Soft
Mean
S.D.
0.021 0.016
0.063 0.037
0.171 0.098
0.024 0.021
0.051 0.039
0.1'22 0.073
0.025 0.016
0.042 0.024
0.137 0.080
Table 3.2: Absolute error in force control for subject CT using right hand index finger with
visual feedback.
Condition Force
Normal · 2N
Normal
4N
Normal
SN
Finger cot
2N
Finger cot
4N
Finger cot
SN
Thimble
2N
Thimble
4N
Thimble
SN
Absolute Error (N)
Rigid
I
Hard
Medium
Mean S.D. Mean S.D. Mean S.D.
0.033 0.029 0.024 0.019 0.037 0.028
0.067 0.046 0.049 0.038 0.063 0.050
0.140 0.114 0.114 0.090 0.151 0.108
0.040 0.034 0.027 0.022 0.046 0.037
0.059 0.048 0.045 0.036 0.068 0.063
0.154 0.130 0.121 0.099 0.125 0.089
0.046 0.044 0.039 0.026 0.051 0.034
0.056 0.046 0.039 0.032 0.061 0.048
0.097 0.081 0.094 0.073 0.116 0.088
Soft
Mean S.D.
0.029 0.023
0.058 0.048
0.134 0.103
0.034 0.030
0.066 0.054
0.139 0.104
0.048 0.047
0.066 0.049
0.103 0.080
Table 3.3: Absolute error in force control for subject JIK using right hand index finger with
visual feedback.
66
.
~~ ~ ~
_-I·~
._
I
X·l~·I
·
l
--
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
8N
2N
4N
8N
Absolute Error (N)
Subject:CT
Subject:JIK
Subject:CH
Mean S.D.
Mean S.D. Mean S.D.
0.036 0.031 0.021 0.016 0.029 0.023
0.067 0.0.51 0.063 0.037 0.058 0.048
0.073 0.064 0.171 0.098 0.134 0.103
0.035 0.035 0.024 0.021 0.034 0.030
0.057 0.037 0.051 0.039 0.066 0.054
0.160 0.129 0.122 0.073 0.139 0.104
0.041 0.034 0.025 0.016 0.048 0.047
0.042 0.030 0.042 0.024 0.066 0.049
0.110 0.077 0.137 0.080 0.103 0.080
Table 3.4: Absolute error in force control for all subjects using right hand index finger with
visual feedback on the softest specimen.
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Absolute Error (N)
Subject:CH
Subject:CT | Subject:JIK
Force Mean
S.D. Mean S.D. Mean
S.D.
2N · 0.123 0.069 0.184 0.139 '0.06-5
0.034
4N
0.135 0.109 0.509 0.263 0.123 0.085
8N
0.164 0.132 0.875. 0.461 0.475 0.260
0.157 0.119 0.202 0.113 0.117 0.098
2N
4N
0.098 0.072 0.437 0.224 0.204 0.132
8N
0.594 0.265 0.642 0.331 0.306 0.184
2N
0.214 0.091 0.127 0.083 0.125 0.121
4N
0.104 0.095 0.532 0.335 0.094 0.062
8N
0.415 0.321 0.833 0.406 0.455 0.368
Table 3.5: Absolute error in force control for all subjects using right hand index finger without
visual feedback on the softest specimen.
67
.
together in this analysis. To minimize the effect of target force in the analysis, the performance
data was expressed in terms of percentage of the target. Twelve ANOVA tables representing
data from different subjects, visual feedback conditions and hands were constructed. Based
on results of the overwhelming majority of the ANOVA tables (11/12), the likelihood that
the specimen softness and the finger contact conditions played important roles in these tasks
was small.
One-way ANOVA tables were constructed to compare target force magnitude factor. The
columns stand for the dlata. collected at three target force levels under various specimen and
contact interface conditions. For all subjects, there were significant differences between the
errors for 2N, 4N, and SN target force magnitudes. For subject CIt, the main difference caine
from the data for 8N target force. For subjects CT and JIK, the differences between 2N and
4N target force magnitudes were big enough to reject the hypothesis that their performance
were the same at 1% significance level under both visual force feedback conditions. ANONVA
tables using the errors expressed as a percentage of target force were also constructed. W\ith
visual force feedback for both subjects CH and JK, the percentage errors were significantly
lower when controlling 4N and SN target force than in controlling 2N target force.
For
subject CT, the percentage errors were not significantly different under the three different
target force levels with visual feedback. However, without visual feedback, the percentage
error was significantly higher for subject CT at 8N target force.
To determine the effect of visual feedback, one-way ANOVA tables were constructed by
using the performance data, expressed as a percentage of target force, collected' from each
subject by pooling data from various finger conditions, target force magnitude, and specimen
softness. The results rejected the null hypothesis for all three subjects with very high F ratios
at 1% significance level and found significant differences between the performances with and
without visual force feedback.
To compare the factor of hand used, one-way ANOVA tables were constructed by using
the performance data, expressed as a percentage of target force, collected from each subject
by pooling data from various finger conditions, target forces, and specimen softness. The
results indicate that there was a significant difference between the performance of the two
hands of subject JK in controlling forces both with or without visual feedback. For subject
CT, there was a significant difference between the performances with the two hands only
when the visual feedback was not available. As far as subject CH is concerned, no significant
68
_II1_IIII·_1_1II____C__
-·--ICi-
ll^-l--CI
II-^----
-·---
difference in performance was found between the two hands.
3.5
Discussion
3.5.1
Effects of various experimental parameters
The force control experiments conducted had parameters including the specimen softness,
finger contact conditions, the target force magnitude, the hands used, and whether or not
the force exerted was visually fed back to the subjects. From the data. collected, not all
the parameters had significant effects on the controlling of norma.l contact force with the
specimens.
The statistical tests conducted indicate that the finger contact condition as well as the
specimen softness did not have significant effects on the results. The target force magnitude
(lid have significant effects when the mean absolute error in force was used in the tests. The
percentage error was also used in the statistical tests as the performance index to normalize
the error. Both subjects CH and JK had significantly lower percentage error controlling 4N
and SN targets. For subject CT, the difference was less significant among all three target
forces. Not surprisingly, when there was visual force feedback, the error was smaller than
without feedback for all the subjects. For both subject CH and J,
the percentage error
increased from less than 2% at SN target with visual force feedback to about 6% and 4%
without visual force feedback, respectively. In the case of subject CT, the increase, from 2%
to 11% at SN, was more dramatic.
The tests on the hands used show that there were significant differences between the
results obtained from two hands of subject J,
whether or not visual force feedback was
present. For subject CT, significant difference between the performance with the two hands
was found only when visual force feedback was not present. But the tests on subject CIi were
not able to reject the hypothesis that the performances with the two hands was the same.
In the experiments conducted by Srinivasan and Chen [39], the mean absolute error in
tracking constant normal forces up to 1.6N was about 0.04N. The results obtained from this
study were similar to that result at 2N (see Table 3.4) for not only the rigid specimen but
also for the compliant specimens. However, when the target force magnitude increased to 4N
and 8N, the mean absolute error increased for each subject but the mean percentage error
(about 2%) did not differ significantly for all the subjects.
69
___111111_1
3.5.2
Force control in haptic interaction with objects
The objects that we interact with as well as the contact interface conditions can vary quite
a lot from one haptic task to another. From the results obtained in this study, we know that
our abilities in controlling normal forces of contact with objects of various softnesses under
different contact conditions did not differ much across the target forces tested (2N, 4N, and
SN).
The major differences in the abilities of subjects in terms of controlling contact forces
under various parameters seemed more obvious when there was no visual force feedback. As
observed from the force data of the experimental runs (from 10 to 15 seconds) which did not
have visual force feedback, subject CT had more error in controlling the applied force than
the other two subjects, even though this subject was as capable in controlling force as the
other two during visual feedback stage. The possible explanations include: (1) the subject
was not able to sense as well, but because of the visual feedback available at the second stage,
the subject performed as well as the other two during that stage; or (2) the subject was not
able to remember the forces as well as the other two subjects; thus maintaining a. contact force
without visual feedback was difficult. In a general haptic discrimination task which typically
involves force control without visual force feedback, one might expect that the subjects who
cannot control well in the tasks (as experimented here) would not perform as well as other
subjects. The softness discrimination experiments presented in the previous chapter shows
that the subject whose force control (without visual feedback) performance was not as good
as that of the other two subjects did not perform as well in the discrimination tasks also.
\We interact with objects daily using'both of our hands. The abilities of our finger force
control from the two hands ma-y differ just as any other sense. It was found from the statistical
tests conducted on the results of these experiments that there were significant differences
between the two index fingers of subject JK in controlling normal forces of contact. As
pointed out in the Discussion section on softness discrimination, the forces used by the
two fingers on the pair of specimens were quite different for subject JIK, which is again
very consistent with the findings here. Although such differences exist, from the excellent
discrimination performance of JIK, it seems that our haptic system can compensate for it.
70
_______I
Ilp___ _____ II _XI _ _·
Chapter 4
Contact Visualization
4.1
Abstract
\\hen a. finger contacts an object, the extend of the contact region depends on the force
applied. As the force increases, the contact grows and the mechanoreceptors under the skin
surface respond and convey information about the contact through the nerve pathways to the
central nervous system. Contact visualization is a. step towards understanding the process
of contact development. A real-time imaging setup which consisted of a videomicroscopy
system and a tactile stimulator system was developed to observe the region of contact and
to perform controlled experiments by using transparent objects. When the finger contacted
the transparent specimens, the contact developed gradually. Initially, there were islands of
contact. As the contact force increased, the islands got larger and then connected to form
finger ridge patterns. However, not all the regions inside the overall contact boundary were in
contact even at high forces. In order to analyze the contact images, various image processing
techniques were applied and developed to improve the contact images and to determine the
contact as distinct from non-contact regions in order to extract contact information. Various contact variables, including nominal area, actual area, percentage contact area, nominal
mean pressure, and actual mean pressure, were calculated by using data obtained from the
active contact of the fingerpad with a rigid Plexiglass plate. During indentation, the nominal area saturated quickly while the actual area inside the overall contact region increased
gradually. During retraction, both the nominal area and the actual area decreased slowly.
On the other hand, the variations of the nominal mean contact pressure were gradual during
both indentation and retraction. Surprisingly, there was almost a step change in the actual
71
---. ^ __1_1__11____·__11_^-(II-
1
C---Il
II
I
mean contact pressure at the beginning of contact, after which it was remained almost constant during indentation and reduced gradually during retraction. The percentage contact
area, obtained by dividing the actual area by the nominal area., increased gradually during
indentation but remained almost constant during retraction. When soft specimens of varying
compliance were used, the nominal contact area observed using low magnification was about
the same for all the specimens when the forces were less than N. At high contact forces, low
magnification settings used to record the entire contact region resulted in poor image quality
due to the deformation of the specimens. When high magnifications were used to capture
only portions of the contact region, the percentage contact areas for the softer specimens were
found to be higher than those for harder specimens. From the visualization of the fingerpad
actively slipping against a flat Plexiglas plat, it was observed that the motions of the finger
ridges near the boundaries of contact moved relative to the plate, which caused the finger
ridges to stretch at the leading edge and compress at the trailing edge. These relative moveinents of the finger ridges will most likely cause the mechanoreceptors underneath the skin
to respond and, through the central nervous system, convey to the brain information about
the incipience of slip. The brain can then activate the motor subsystem to take appropriate
actions to avoid objects from slipping through our fingers. One reasonable hypothesis for the
boundaries to slip first is that the pressure distribution on the contact region is in fact not
uniform. If the contact pressure in the middle was higher and decreased until it reached the
boundary of contact, the observed slip phenomenon can be explained in terms of Coulomb
friction. The visualization system and the image processing techniques developed in this
study can be applied to other biomechanical experiments involving fingers, such as for the
automated fingerprint identification system involving image capture, enhancement, and data
compression.
4.2
Introduction
In studying various aspects of the human sense of touch, it is important to understand the
biomechanics of contact during manual interactions with objects.
During the process of
finger-object contact for exploration or manipulation, the mechanoreceptors underneath the
skin are an important source of information. Since these sensors are embedded underneath the
finger ridges, visualizing the contact region will help us understand what kind of mechanistic
72
information is available to the tactile sensors. As the finger comes in contact with an object,
the contact region develops gradually.
The overall area as well as the details inside the
contact boundary vary with properties of the object, properties of the finger, and the forces
of interaction.
Therefore, the objective of this study were to develop systems to enable
visualization of the contact region and to find out how contact information such as contact
forces, the overall contact area., and the percentage contact area. change during the course of
contact.
After contact of the fingerpad with an object, a. fingerprint is often left on the surface of the
object. It is not too difficult to obtain a. latent fingerprint left behind by fingers on a. variety
of objects [19] [14]. In general, for latent fingerprinting, one will need tools and materials
such as some talcum powder, a. fine paintbrush, clear cellophane tape, and a. shiny black
paper. By dusting the object with talcum pow)der, blowing on the talcum power gently, and
brushing the powdered spots lightly, a. pattern will show and cellophane tape can be used to
lift it up and put it on the shiny black paper for examination. Although it is not too difficult,
one will have to practice this a. few times till one gets the hang of it. This simple procedure
takes a. lot of time and is only good for latent fingerprints and is not suitable for dynamic and
real-time observations which are necessary to capture the progress of contact. To find out
the contact area, ink fingerprinting would work just fine for some applications that requires
the overall contact area. For a more detailed level of study on the contact region, however,
a. more capable system is called for. Thus a videomicroscopy system which can achieve such
goals was developed. In addition. to perform controlled contact tasks, a. tactile stimulator
system was also developed, which was used- to control the motion of a transparent object to
indent a. finger which is stationary (passive touch). With the two systems integrated together,
the development of the contact region between the fingerpad and objects can be examined in
a controlled manner in real-time.
Studies on various aspects of haptic interactions have utilized the information obtained
from the contact region. For example, contact area estimation was used to relate to the
perceived curvature in the research conducted by Goodwin et al [18] on the tactile discrimination of curvature. They estimated the area of contact between skin and objects with
different curvature by ink fingerprinting. They found that as the curvature increased, the contact area decreased. And lower contact force resulted in a decrease in contact area.. In the
study on human discrimination of thickness, Ho [7] estimated the contact area between finger
73
and plates of various thickness by ink fingerprinting and the data was used in finite element
analysis to compute the deformed plate curvature.
By using the videomicroscopy system
developed in this study, Dandekar [10] conducted experiments to perform 3D reconstruction
of the >primate fingerpads for finite element analysis and also measured surface deformation
of human fingertip i
vito with indenters of various sizes and shapes.
In this study, the focus was on the visualization of the contact region with objects of differing compliance. This chapter includes descriptions of the various devices dleveloped whicll
enable such observations, image processing techniques applied to enhance or visualize the
image data,, observations of the slip phenomenon between finger and rigid Plexiglas. and also
presents data obtained from controlled contact experiments with soft objects. The visualiza.tion systells de\veloplecl in the study, the accompanying image processing and visualization
software. andl the results on contact region development can be applied to other biolecllhanical
experiments ivoleving fingers and also to the automated fingerprint identification systems [19]
for image capture, enhancement, and data compression.
4.3
4.3.1
Methods
Videomicroscopy system
A videomicroscopy system capable of real-time imaging was developed to observe the region
of the human finger in contact with transparent objects. Figure 4-1 is a schematic diagram
of the systeln which includes a fiber optic light source, a. gray scale CCD camera, a zoom
lens,' a video monitor, and a. frame grabber hosted by a 80486 personal computer.
The contact region is illuminated by a Fostec Model 8375 fiber optic light source. For
high magnification images, the light illuminates the contact region coaxially through the beam
splitter and zoom lens. For low magnification images, an alternative light is used as indicated
in the figure. The Unitron 1:6.5 zoom lens provides a range of magnifications of the contact
region, enabling the overall contact area as well as the details of islands of contact with a few
finger ridges to be imaged. The output of the high resolution Hitachi Model KP-M1U CCD
camera is displayed on a Hitachi video monitor. The camera output can also be digitized by
a BitFlow VESA local-bus VideoRaptor frame grabber in the 80486 personal computer.
Using this videomicroscopy system, video data can be digitized in real-time and transferred from the frame grabber to the computer system memory. The amount of digitized
74
_I_
__
r
·
IN -
- ,r
Beam
Splitter
Figure 4-1: The videomicroscopy system.
video data. is thus limited to the available memory in the computer system. For a typical
640x480 S-bit gray scale image resolution, the 16MIB memory inside the computer can hold
about 54 frames of video which amounts to about 1.8 seconds of data if digitized at a rate of
30 frames per second. Observations made from daily contact tasks suggest that the development of a. typical finger-object contact usually has a time span of less than 2 seconds. For
slower contact speed (the contact region will also rvary slowly), the video acquisition rate can
be reduced to accommodate a longer period of contact without sacrificing either the duration
or the accuracy of the analysis.
4.3.2
Tactile stimulator system
A tactile stimulator was developed to investigate the contact phenomena in a controlled manner. Figure 4-2 is a diagram of the tactile stimulator system. This linear stepper motor based
tactile stimulator is used to carry a specimen to indent a stationary finger at a given velocity.
The Industrial Device Corporation (IDC) NS2T205A-2 linear electric cylinder together with
a IDC S5101 micro-stepping drive has a step size of less than 1 micrometer which makes it
easy to achieve high precision.
As indicated in Figure 4-2, the motor is controlled by a 80386 personal computer with
a custom digital input/output interface. By changing the frequency of the step pulses sent
to the motor, the speed of indentation can be accurately controlled. The timing of the step
75
II
i
i
386 PC
Power
Supply
51"
_J
:l11U
I 1MHz Timer
Step
Micro-
'[.,:l
Pulse
Stepping
IDigital
IjO
*
Drive
Linear
Stepper
Force
e,
Signal
r -S
L_ tFinger
Specimen
Figure 4-2: The tactile stimulator system.
frequency is controlled via a IMHz custom timing interface.
In order to observe the contact forces between the specimen and the human finger, a.
strain gage based single degree of freedom force sensor was built and mounted between the
specimen holder and the motor cylinder.
Binocular spring element was used to construct
the sensor because it is more rigid and less sensitive to location of force application. Four
strain gages, made by Measurements Group, were mounted on the top and bottom surfaces
of the force sensor near the center of the two holes of the binocular to form a full bridge. The
force signal was amplified by a signal conditioner before it was digitized by a data acqusition
system in a computer.
4.3.3
Real-time imaging setup
Both the videomicroscopy and the tactile stimulator systems can be used by themselves to
collect useful data. For example, the videomicroscopy system was used for the 3D reconstruction of the fingerpad and observe the surface deformation of the fingertips under a variety of
indentors [10]. The integration of the two systems which would provide synchronized force
and video data, collection is one of the important goals of this research.
Since digitizing the video data and controlling the stimulator both require constant at-
76
---I
I
tention of the central processing unit of the computer (CPU), two computers were used to
meet the two needs. In such a design, the synchronization of the two tasks was a major
concern. This problem can be solved by having an accurate custom timer interface on both
computers and use digital input/output interfaces to allow communication between them for
synchronization.
Figure 4-3 shows a schematic of the integrated system. The conmmunica-
tion between the to
comlputers is achieved by sending command data. through the custom
digital input/output interfaces installed on both computers. The 80386 PC' is dedicated to
the motion control of the stimulator while the 80486 PC records both video and force data
during contact. The 80386 PC receives parameters such as motor speed and travel distance
from the 80486 PC and executes the command accurately, by using the 1MHz timer, after
receiving the start signal. On the other hand, the 80486 PC coordinates the experiment and
collects video and force data. according to its own time base which is the same custom timing
interface as the one in thile 80386 PC.
As a result of this integration, the two computer systems work together with their own
control software and the setup is capable of a, video rate of at least 20 frames per second and
a force rate of 1000 samples per second. However, such high data rate can only be sustained
for a short period of time, usually a little less than 2 seconds, because of the amount of
system memory available on the 80486 computer to store the digitized image (about 300
IKByte per frame). Typical contact duration of tasks such as softness discrimination takes
about 1 second. Therefore, the 2 second capture time allowed by this setup is sufficient for
achieving the goals of the investigations.
4.3.4
Active and passive touch experiments
Performing active and passive touch experiments to obtain contact information is a crucial
step towards the understanding of the mechanical inputs to the mechanoreceptors under the
skin. The real-time imaging setup (Figure 4-3) was used to visualize the contact region and
record the contact forces. In passive touch experiments, the finger was attached to a stationary
finger holder and the tactile stimulator applied specimens to the finger at controlled velocity
of 2.4mm/sec. During active touch experiments, the subject's finger was not constrained.
Instead of moving the tactile stimulator, the subjects moved their finger to touch the stationary
specimen.
Transparent rigid Plexiglas and compliant silicon rubber specimens were used in the
77
_______1__411__^1_____II
L--L·III-I_-
Ill._Y
--_-
I
---
r-…-- - - - -
- - -1
i
I
I
Timer
I
_386 PC
|iI',Timer
I
I
I
I
I
Timer
I
]
Specimen
Figure 4-3: The real-time imaging setup.
experiments. By adjusting the amount of diluent GE SF96-50 mixed to fixed proportions
of GE RTV615A and RTV615B silicon rubber components, the compliance of the specimen
canl be varied.
The procedure and method used to cast and calibrate the specimens are
described in detail in the Methods section on softness discrimination experiments. Three soft
specimens with objective compliance value of 0.086mm/N (specimen code AB4), 0.188mm/N
(code BA4), and 0.304mm/N (code CA4) were used. The transparent rigid Plexiglas used
had a thickness of 1/4 inch.
The custom-made binocular force sensor was used to record the contact force.
The
sensor has a. range of 40N and- the data is digitized by a 12-bit data. acquisition board at
the rate of 1000 samples per second.
Due to its binocular design, the sensor is not very
sensitive to the location of load application. The contact region was captured into the 80486
PC system memory at a rate of 20 frames per second.
In passive touch experiments, the
recording was carried out for the indentation portion. In the active touch experiments, the
recording time span was about 2 seconds and required coordination between the subjects and
the experimenter for a good capture. Three repetitions were performed for the passive touch
experiments; the active touch experiments were repeated until three satisfactory sequences
were captured.
78
_ _L·l^llll__lll_____
---·IIIII1_1-··LL---)
.I-·-LC---·-·-
I-
II_
-II
4.3.5
Observations of slip
In addition to the recording of the contact region during passive indentation and active
touch experiments with compliant specimens, the videomicroscopy system can also be used
to visualize a variety of contact related phenomena. For example, the study of slip requires
visualization at the finger ridge level.
For observations on slip, the subject first contacted the rigid Plexiglas and then stroked
it back and forth with the fingerpad in the horizontally direction. The subject repeatedly
performed the actions and a. two second capture was initialized at the appropriate time to
record a. part of the process. Due to the setup limitations, only active touch experiments on
slip are possible. This is because, to have controlled passive slip, another motor to control
a second degree of freedom is required. Also, a. more quantitative study of slip requires
shear force measurements. In the experiments described here, the phenomenon of slip was
olbserved and the sequence of images obtained was analyzed. Even with limitation of the
available setup, the understanding of slip at the ridge level is enhanced by these observations.
It. also provided good evidence on the nature of force distribution over the contact region.
4.4
Contact image processing
In the context of tactile sense, the portion of the fingerpad that is in contact with the object
is especially important since the mechanoreceptors under that region will generate most of
the nerve impulses transmitted to the central nervous system. The images acquired from the
videomicroscopy system are of high enough contrast as to be visible to the human eye when
appropriate lighting is used. In order to provide qualitative visualization and to perform
quantitative analysis of the images, algorithms for enhancing and extracting the contact
regions were developed. This section is devoted to the techniques used in this study in order.
to enhance contact images, separate the contact area.from the non-contact area, and visualize
various contact phenomena.
4.4.1
Simple thresholding
When appropriate lighting is used, the regions of the finger that are in contact with the
specimen have lower image intensity than the regions that are not in contact. This suggests
the use of a simple thresholding of the image intensity to determine the contact area. The
79
___a_
L_
I--I-
I----I·
_I
-
Original image
X 10
4
Image histogram
C
X
0
0
Threshold value: 90
100
200
Gray scale
Threshold value: 100
Figure 4-4: Application of simple thresholding to obtain the contact area..
threshold value can be picked out from the image histogram, which is the distribution of gray
levels in an image. A higher gray scale value in the distribution corresponds to a brighter
pixel. If the pixel at a particular location has a lower gray level than the threshold, it is in
contact. Otherwise, it is not.
A typical result of applying such a technique to obtain the contact area is shown in
Figure 4-4. The upper left graph shows a contact image of a fingerpad with rigid Plexiglas.
The histogram of the image is shown at the u'pper right. The simple thresholding method
requires one to pick a gray scale value to convert the original image into a binary image
consisting only of contact and non-contact pixels. Although human eyes can easily pick out
the contact region in the image because of our sophisticated visual system, it is difficult
to pick a gray level from the image histogram to perform the thresholding operation. The
bottom two graphs show the result of using two different threshold values. A threshold value
of 90 seems too low because it cannot convert the middle region into a binary image properly.
If the threshold value is increased to a higher value of 100 in order to convert the center part
properly, the boundaries become too dark.
80
II- I---
-IYL1-III·C-C---.-· ·- -~~~~~~~~~--·-CI
_I__I___II111
.---I~~~~~~~~VI~~ll
_I_~~~II~I__
By taking a closer look at the original image and comparing the gray levels of the white
region in the center and that of the boundaries, one realizes that the background of the image
has non-uniform gray values. Since the illumination of the image is not perfectly uniform,
contact regions in an area of high illumination may have equal or greater intensity than noncontact regions in the area of low illumination. Therefore, the simple operation of thresholding
cannot convert the pixels into contact or non-contact regions satisfactorily. However, if the
effect of non-uniform illumination can be eliminated by other techniques, then thresholding
can be applied to obtain the contact area reliably.
4.4.2
Homomorphic processing
One way of removing the non-uniform lighting is to apply homomorphic processing [29][17] 1
Homomorphic processing can be used to reduce the dynamic range of the image and enhance
the local contrast. The resulting image has uniform illumination, thereby facilitating the use
of the thresholding method to determine the area of contact.
The gray level of a contact image f(nl, 712) can be modeled as
(4.1)
f(nl, n2) = i(nl, n 2 )z'(ni, n2),
where i(nl, n2, ) represents the illumination of the image at location (nl, n 2) and r(n 1 ,
712)
represents the reflectance of the object. In this case, the illumination i(nl, n2) varies slowly
across the image with a low spatial frequency of one cycle per image. The reflectance r(nl, n2)
contains the details of the fingerprint whose fundamental frequency is determined by the
number of finger ridges present in the image. Since equation 4.1 cannot be used directly
to perform a Fourier transform operation in order to separate the two components, we can
convert it from a product to a sum by taking the logarithm of equation 4.1:
log(f(nl, n2)) = log(i(nl, n 2 )) + log(r(nl, n2))-
(4.2)
Now, because of linearity, we can filter the log of f(nl, 712) to remove the illumination
effects. After that, we can exponentiate the result to obtain r(nl, n2). A block diagram for
applying homomorphic processing is illustrated in Figure 4-5.
'The homomorphic processing technique was developed with the help of Eric Foxlin and Robert Stadler
and the author wishes to gratefully acknowledge their assistance.
81
11_1--4 1
-----
II~
----_^·11 1-1--_-_~·
41
-^-·-
1--·1-
f(nl,n2)
-
i
-
[ ANTI-ALIASING
KI
FILTER
[
DOWN
|
DECIMATION
l -SAMPLE
i
LOG
HIGH-PASS
FILTER
HOMOMORPHIC
PROCESSING
EXP
THRESHOLD
I-----
------
MEDIAN
FILTER
CONTACT AREA
Figure 4-5: A block diagram for applying homomorphic processing to determine the contact
area.
82
-··--------------
·---------·-----
-----·-----
·---
---
---·--------·---
·-
If the homomorphic processing successfully removes the illumination effects, the unimodal
histogram (Figure 4-4) of the original image should be in the form of a imodal histogram.
One mode represents the finger ridges that are in contact and the other mode represents
the regions that are not in contact. Wle can then choose a threshold value between the two
modes so that the contact areas in the image are black and non-contact areas are white. Any
significant. noise will be converted into impulsive noise by the thresholding. A mnedian filter
can serve to remove the noise before counting the pixels. The actual contact area can l)e
calculated by a.pplying a. calibration constant which represents the area of a single pixel. For
high magnification images which contain only a few finger ridges, the frequency of the ridges
is closer to the illumination frequency. In those cases, either a. filter with very sharp cutoff
must be used or a. decimation on the images must be performed in order to separate the two
a.reas(Figure 4-5).
The implementation of the algorithm is accomplished by using the software package MATLAB in conjunction with custom developed C programs. The frequency transform method
was used for the filter design. It begins with the design of an optimal 1-dimensional filter
using the Parks-McClellan algorithm. For an image that is 640 pixels wide, the illumination
frequency is r,/320 (one cycle per image). If there are 10 finger ridges in the image, the
fundamental frequency will be rr/32. So, the filter must pass r/32 but filter
/320. The
1-dimensional frequency response is later converted into a 2-dimensional frequency response
with the McClellan transformation. The high-pass filtering operation is performed in the frequency domain by multiplying the Fourier transformed image and the high-pass filter. Then
the inverse Fourier transform operation converts the result back into the spatial domain.
Figure 4-6 shows the same original image shown in Figure 4-4 and the resulting image
after homQmorphic processing, its histograms and the thresholded image. In addition to
checking that the histogram is now bimodal, the results of the image processing can also be
verified by eye to see how well they represent the true contact area shown in the original
image.
4.4.3
Scan-line processing
In real-time applications, reducing the amount of time required to process the image data is
critical. For example, for a robot equipped with a vision system or a high resolution tactile
sensor array to manipulate an object like the humans do, the recognition time is critical.
83
·__·_X
1__1
1__1_1___
_
I
____I__
___
Original image
Homomorphic processed image
Thresholded image
Image histogram
C
=3
0
4,
-a
0
X
D.
Threshold value: 160
100
Gray scale
200
Figure 4-6: Apply homomorphic processing to image.
84
--·----------------------·---·---
--·-----
·
-----
-----
-·--
···-
-·------------
-
-
-
Scan Line
r
---
;UU
i
150
(nn
I nn
Scan Line Gray Scale Bound
Zuu
a)
150
(n
I Af
Normalized Gray Scale Ratio
o
0
a 0.9
.2
C 0.8
n 7
Figure 4-7: The scan-line processing on a fingerprint line.
The same is true for finger print security systems. In real-time inspection or target detection
applications, optical correlators are typically used to achieve the required speed [2][5][6]. If
using optical correlators is not practical, scan-line processing seems to be the best choice. By
processing the image line by line using simple operations, it is possible to achieve real-time
performance.
The idea of scan-line processing is generated from the image model used in homomorphic
processing, image calibration, and other techniques such as top-hat and well transform for
peak and valley detection [1]. In the case of top-hat transform, the bright peaks of an image
are revealed.
The top-hat image is created by first applying an opening operation which
removes protruding peaks from the image.
Then a dual-image point process is used to
subtract the top-hat image from the original image. The result is an image in which the
bright peaks appear.
The scan-line processing method used here first estimates the background image intensity
The first step is to find the location of the
by bounding the scan-line to be processed.
maximum intensity value on the scan-line. Then a background is constructed from the history
of searching for the maximum location starting from both ends of the scan line. The result is
85
__i_____
__1_IIII__^___IIIIII_
^.IXI
11I --1 I
Original Image
Image Threshold = 0.95
I----
I
I
I
I
I
Image Threshold = 0.90
I
Image Threshold = 0.85
I
,
i
Figure -1-8: Results of applying the scan-line processing to a. fingerprint image with different
threshold values.
usually a. dome shaped background with steps. The third step is to divide the original scanline by this estimated background. The result is a. gray scale ratio between 0 and 1. A high
contrast image would result in scan-lines in which the contact pixels would have gray scale
values closer to 0 than the result from a. low contrast image. Afterwards, a threshold ratio
can be used to convert the scan-line into binary images. Figure 4-7 illustrates an original
scan-line, a constructed background and their ratio. The results of the scan-line processing
and thresholding are shown in Figure 4-8 where three different threshold percentages values
were used.
When the borders contain finger ridges, error will occur from the method outlined above
because the gray scale ratio will be close to 1 when it should ideally be lower than 1. For
images containing a substantial amount of noise, a low-pass filtering on the scan-line would
improve the thresholding result. This technique is suitable when the fingerprint does not
occupy the whole image, as in the case of real-time automated fingerprint recognition or
security systems. It efficiently converts the gray-scale image into binary in real time, thus
86
----
-·----------------L---l-·-----r
...
,-1.1----^-4---·lpl·1·-1-.
I-C-*
-^-·---I-
reducing the data size to one eighth of the original. For most applications, the size of the
resulting image can be reduced by compressing the binary image using algorithms such as
LZNW [30]. An image size reduction of about 30 was achieved in pilot trials with fingerprint
images. With the possibility of real-time binarization of the original fingerprint images, the
automated fingerprint recognition systems [32][9] could be speeded up.
4.4.4
Morphological processing
Image morphology involves pixel level processing that helps to clarify and simplify objects
of interest[1][17]. It can be applied to obtain outlines or skeletons of an object by emptying
the interior or reducing the thickness of the object. For binary images, binary morphological
processing uses logical operators such as AND and OR on neighboring pixels to obtain a
resulting image. In this study, it is used to obtain the boundaries of the finger ridges for the
purpose of visualization of contact phenomena.
Erosion and dilation are two fundamental morphological operations. A 3 x 3 mask size
is usually used for the operation. Suppose a binary image is composed of black and white
pixels, with the object represented by white pixels. To erode away the boundaries of the
object, the erosion operation is called for. If a pixel and its eight neighbors are all white,
the corresponding pixel is white in the eroded image; otherwise, the corresponding pixel in
the resulting image is black. When erosion is performed on a pixel inside an object, it has
no effect. However, if the pixel is on the boundary of an object, since its neighboring pixels
consists of both object and background, it will be converted into a background pixel. If there
is random noise consisting of only a few pixels, they will be eroded away also. Dilation does
the opposite to the image: a pixel in the dilated image is white if any of the pixels defined
by the mask is white in the original image. It helps to make the object bigger and fill in tiny
holes inside the object.
Different combinations of the erosion and dilation operations produce different effects.
The opening operation is an erosion operation followed by a dilation operation to remove
single-pixel noise spikes. The closing operation is a dilation operation followed by an erosion
to fill small holes and gaps. When an eroded image is subtracted from the original image
by using a dual-image point process, the result is the outline of the objects in an image.
Figure 4-9 shows the outline of the fingerprint images created by the outlining process. The
image shown was first thresholded by scan-line thresholding with a threshold value of 0.95.
87
_______I__L_
l_lI
____II_
I_
_
_
_^_I
_F_
Original image: A
Outline Image: A
Original image: B
Outline Image: B
Figure 4-9: Results of applying binary morphological processing to obtain the outline of the
fingerprint contact regions.
88
A dilation followed by an erosion operation was used to reduce the noise. Two more erosion
operations were performed and the resulting image was subtracted from the noise reduced
binary image to create the outline image.
Implications on the mechanics of contact
4.5
4.5.1
Overall (Nominal) and actual contact areas
When the finger comes in contact with objects, the contact region gradually develops. At
first, there are islands of contact corresponding to contact points on each of the finger ridges.
As the normal force of contact increases, the islands grow bigger and the overall (nominal)
contact boundary grows as well. The islands of contact eventually get connect together result
in the fingerprint patterns. Figure 4-10 shows part of a sequence of images obtained when
a fingerpad actively contacted a Plexiglas plate. The image sequence was recorded at a rate
of 20 frames per second under low magnification and compressional force of contact was
recorded at 1000 samples per second. Therefore, there were 50 force samples within a single
frame. The corresponding mean forces exerted during an image frame are also shown in the
figure. The growth of the overall contact boundary can be seen by comparing consecutive
frames. To quantitatively describe the growth of the contact region, the overall area of the
contact boundary and the actual areas inside the contact region can be useful measures.
To obtain the overall area, the border of the image region occupied by the fingerprint needs
to be extracted. The border extraction was performed in two steps. First, the original contact
images were converted into binary images by using scan-line thresholding or homomorphic
processing. Then, an estimate of the border was obtained by using a technique similar to
the wedge-ring detection method broadly used in pattern recognition [9]. In this modified
wedge-ring method, the original image was partitioned by using wedges and rings formed
by concentric circles and radial lines. Figure 4-11 shows the wedge-ring pattern that was
used to count the contact pixels and obtain the contact region boundary. The actual pattern
consisted of more rings and wedges than in the one shown. The numbers were determined
by using typical images and by adjusting on the basis of visual inspection of the extracted
boundary smoothness. The contact pixels from a binary image were used to first calculate
the approximate center of the contact region by using the averaged coordinates. Then the
wedge-ring pattern centered around the contact center was superimposed to collect contact
89
Image 2: 0.26N
Image 1: 0.10N
.
Image 4: 0.81 N
Image 5: 1.1ON
Image 6: 1.30N
Figure 4-10: A sequence of images of contact between a fingerpad and Plexiglas specimen.
90
Figure 4-11: The wedge-ring pattern used in contact region boundary extraction.
pixels within each cell. Once the pixels were assigned to the appropriate cells by determining
their distance and angles with respect to the center of the contact region, the cumulative sum
of contact pixels within the cells along each wedge starting from the center was obtained.
An estimate of the boundary can be made based on the ring radius inside which most of the
contact pixels reside. A typical ratio of 99% was used to avoid noise existing outside the
border, which also showed up as contact pixels. The number of wedges and rings used would
roughly determine the errors in the boundary estimation. Figure 4-12 shows a binary contact
image and the result of the boundary points estimated by using the above procedure. The
number of wedges and rings used were 48 and 80, respectively. In general, using more than
30 wedges and 60 rings will generate satisfactory estimates for the border. However, if the
number of wedges is too many, the resulting boundaries may not vary smoothly.
The total number of pixels inside the boundary were estimated from the coordinates
of the border points and that of the contact region center. Calibration of image size was
performed before the contact images were obtained. The calibration constants depend on
the magnification of the images and can be found by imaging a reticle which has calibration
patterns and by counting the corresponding number of pixels that occupy a known area.
The overall contact area estimates can then be obtained by applying the calibration constant
which represents a unit pixel area for a particular contact image sequence.
Although the overall contact area is a number which represents the nominal size of the
91
Figure 4-12: An estimate of the overall contact region boundary using the modified wedgering method.
contact region, the actual area of contact inside the contact boundary is as important. For
example, given a contact force, a nominal mean pressure can be determined if the overall
contact area is known. However, from results of visualizing the contact region, we know that
not all regions inside the contact boundary are actually in contact. Therefore, the nominal
mean pressure can be considerably less than the actual mean pressure if the actual contact
area is only a small portion of the overall area. The actual area in contact can be estimated by
counting the contact pixels after thresholding, although such estimates may have inherently
higher errors due to the fact that low magnification was used to acquire the overall area. By
using high magnification capture of the central portion of the contact images, the actual area
estimations will be more accurate owing to higher resolution. However, depending on the
locus of the image within the contact region, the percentage contact can vary since the finger
ridge pattern is different in different parts of the fingerpad.
The following illustrates various pieces of information available during contact by using
data from active touch experiments on fingerpad contacting with a rigid Plexiglas plate under
low magnification. Figures 4-13 and 4-14 show several variables plotted against time and
92
force for subject CH. The profiles of the plotted variables are divided into two phases: the
indentation phase and the retraction phase. The indentation is marked with crosses whereas
the retraction portion is marked with circles. Since the first few frames digitized did not
contain contact images, the calculations were done for the frames which had a mean force
larger than 0.1N.
In Figure 4-13, the first graph shows the force profile which reached its maximum value
just before the 1 second time mark. The corresponding nominal contact area increased as the
force increased during the indentation with an initial rapid increase followed by a slower rate
as shown, it saturated even before the contact forces reached the maximum. By comparing
the nominal area witlh the actual contact area., it can be observed that during the later part
of the indentation, the actual area kept on increasing even after the overall contact saturated.
The actual area divided by the nominal area is shown as the percentage of contact inside the
nominal contact area.: it increased during the indentation phase and seemed to stay constant
in the figure during the retraction phase. The mean nominal contact pressure was obtained
by dividing the contact forces by the nominal contact area. The shape of the mean nominal
pressure is close to that of the force profile. On the other hand, when the actual contact area
was used for pressure calculations, the mean actual pressure obtained showed qualitatively
different characteristics from the mean nominal pressure. Unlike the nominal pressure which
rose very fast durint indentation, the increase in the actual pressure was slow. The pressure
drop-off rate for both nominal and actual was about the same during retraction. Since the
percentage contact inside the overall area ranged from 10 % a.t the beginning to 25 % during
the retraction, the actual pressure was at least 4 times as large as the nominal pressure.
Figure 4-14 provides a different view of the data obtained. The difference between the two
phases of contact is more dramatic when plotted against force. Given the same amount of
force, the contact information strongly depends on whether it was in the indentation phase
or the retraction phase. The only variable which was similar during the two phases was the
nominal contact pressure.
4.5.2
Contact areas with soft specimens
The real-time imaging setup was used to observe the contact areas of the fingerpad with
objects of various compliances during passive indentation. Passive touch experiments were
conducted by using the tactile stimulator to move the specimen by 3mm from the point of
93
Subject:ch Specimen:rig Trial:1
2.5
25
.`
2
X
1.5
20
:
-x-....:.
X
-X
1
()
......
x
xX
- - -.
;......
°O
0.5
-:x
a,
o
X
o
LL
:
.....
O
x
(a
O
c
.
X
x x:x
x,
a)
2 1C
0O:
x,:
0
oThj~
a
0
0.5
1
Time (sec)
1.5
O
x ''
5
0
2
?00
0.5
r~rn1.,
O
150
.x
x-
x
E
2
x.
x:
c-
Z
.
nI
1.5
2
O
E
2E30
X
"'X.....:
a)
--X
.
.
x~~
-.......
X
<
X:
10
X
0
1
Time (sec)
< 20
50
0
. . . ........
,
-20
E
.'
-40
<
o
x
100
''
x.
X
,
a-
-
cJ
x:x
I()
0.5
1
Time (sec)
1.5
0
2
n
14
x.
xx
0.5
1
Time (sec)
1.5
2
n"
U.UU
< 0.012
E
0.01 ... .........
Z
xx
' 0.05
E
2
:<o
.. ..
z 0.04
..
. ...
.. ..
.
O
. . . . . ... . . . . . . . . . ... . . . . .
.
.
- 0.008
X
D 0.006
0.
: 0
0.02
a
(u
r 0.004
E
O
0 0.002
0
0.5
1
Time (sec)
..........
0.01
............
...........
1.5
U
2
0
................
. . . . . . . . . ... . . . . . . . . ... . . . . . . . . .
0 0.5
n
0
Q-0.02
0.5
:
1:
1.5:
;~
1
1.5
2
Time (sec)
Figure 4-13: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification.
94
Subject:ch Specimen:rig Trial:l
C
_
z
.
.
;O
0'
x
1.5
00
X
x
.
o .
- 0
X
1
0.5
......
~
·X
X
(..
0
°
...
.X
0
..
X
a)
0)
c
'.
,..°..
X
a)
0:
10
1
C)
a)
0.5
)
1
Time (sec)
0rr
ZJU
5
0
*
0.5
xo -
:x
:
.X
0
2.
r~n
.
0
000
-40
C"
' :
E
E 30
:X
:
. ..:
.. ..
'x
20
C
0
A)
x
O OX
X
X
< 10
x.......-
: x
-O.
O
-O
........ ........... . ....
a)
o 50
§ 50
z
2
1
1.5
Force (N)
.0
o
o0
E
E
cZ
P 100
20
1.5
.
.
< 150
.....
x
0o
Ar- ::
-u.J
x
C
0
O
x
o
x xx
20 ....
...............
x
---
v
LL
0
, :Ox O
2
a
0
x-
X
I I
0.5
v
0
1
1.5
Force (N)
2
2.5
0.5
0
0.014
2
1
1.5
Force (N)
2.!
$< 0.012
E
E 0.01
z
0.0 I~
..'. .....
:
-......... ..........
<
a)
..... .... .. ..... ... ...
X ....
0
a 0.006
X
0-
xx xx xx
E o0.0
Xo
. ... ... ... .... .
0.0 5.
Sx ·
o 0.0
0
.'x. ........
O....
4
..... ..
.........
a) o.o
-
*m0.004
.E
o 0.002
t
..........................
i ....
z
0
0
0.5
1.5
1
Force (N)
.....
.0)1
00
n
2
2.5
0
0.5
1
1.5
Force (N)
2
2.5
Figure 4-14: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification.
95
Subject:JK Specimens: hard(o), medium(x),soft(+)
Iou
x
140
x 0
X++
120
x
+
+
:X~0
-
X
o
<X+
0
E 100
E
E
0
0
+
_, 80
O
O+ 0
+
.'_
E 60
Xt
z
40
O'1
t-0
20
1n
0
Figure 4-15: Nominal
for sbject . I.
0.1
0.2
0.3
0.4
0.5
0.6
Contact Force (N)
0.7
0.8
0.9
1
contact area versus contact force for specimens of various softnesses
barely touching to indent the stationary finger at a constant speed of 2.4mm/sec. The overall
contact. areas were obtained by using low magnification to capture the entire contact region
when the forces were less than IN. At higher contact forces, the low magnification images
obtained to capture the entire contact region were of poor quality due to the deformation of
the specimens. Therefore, the percentage contact areas were obtained separately using high
magnification. Since the real-time imaging setup does not have a large depth of focus a.t high
magnification, the focus was adjusted to about half of the range of specimen motion to obtain
acceptable images during indentation.
The overall contact boundaries were extracted manually since the automatic method did
not give satisfactory results for all the images due to the presence of noise and specimen
deformation. The area calculations were performed on the manually extracted borders which
were obtained by using MATLAB software GINPUT function. The overall area versus mean
contact force curves for all the specimens were about the same when the contact force was
less than about N. Figure 4-15 shows the results of nominal contact area versus the contact
forces from three trials, plotted with the same symbol, of passive touch experiments with
various specimens, plotted with different symbols, for subject JI(.
To have higher resolution in the data analysis, the percentage contact areas for soft specimens were obtained with higher magnification.
96
By using homomorphic processing, the
Contact Force
Subject(CH) Specimen(CA4)
2.5
E
3
...·
2.5
2
z
Q)1.5 .
E
1
o 0.5
a
b
a
UU.
+
2
......
0.5
1
i
0.5
Time (sec)
Percentage Contact
·
I!
·
+
_s~fi2F"es
2
1
Displacement (mm)
Per.Contact vs. Force
x......
..............
:
x+
....
:..
...
.. .. .. . ... .. .. .... ... :' "+ .
600
.. . . .... ..
. . . . . .......0......
-
Bw
l
0
1
60
-.50
. . ..-
01
ap-
C0'
0
...
8 1.5
a)
c
+
...
50 ...
* 40
40
o 30
0
) 20
a10
0 30
+
+
- 20
*0
10
I
0
0
^
0
2
1
Displacement (mm)
1
2
Force (N)
3
Figure 4-16: Percentage contact data from three trials for subject CH in contact with the
soft specimen CA4(0.304mm/N).
97
-------··--
Subject(CH) Specimen(AB4)
Contact Force
.............. i............'"~
2. 5
E
.
E
a,
a)
1
..
. ..0
oi
3
..............
-
[]l g~~~
---··eEr.
apt~
.. ifit
.
tr~~~t
e~~~r
I~~~~
~
. . .. ..... ...... .... ....
3-·
S
s:
.................
E
..
<+
.
~ ~
:+
-,,
2
' ....-
o
LL
c
1
+*99
0
C
0
40 ::--::
o
n
0.5
Time (sec)
Percentage Contact
. . .... . .... . ...... . .
+
..... +/X
++
30
1
2
Displacement (mm)
Per.Contact vs. Force
0
+:
40
+
C
U0
++
0
30
++
(3 20
...
.
,
,-
10
0
++
20
a,10 +
,
a
10
A
f
II
1
2
Displacement (mm)
x
x
x
0
+
++++ >Pxo
Q
..
+++6 Ox
+
9
-x x
x
a)
-
1
0
.
1
.
2
Force (N)
.
3
Figure 4-17: Percentage contact data from three trials for subject CH in contact with the
hard specimen AB4(0.086mm/N).
portions that were in contact were separated from the portions that were not in contact.
Figure 4-16 shows the results of three trials, plotted using three different symbols, from
contact experiments using a, compliant object (CA4) which has an objective compliance of
0.304mnm/N. The mean contact force during each image frame increased as the specimen
was indented into the finger. by the stimulator. The corresponding percentage contact area
grew with increased depth of indentation. Since the data was processed using homomorphic
processing, the percentage results which are less than 15% or more than 85% are considered
unreliable because the processed image histogram was approximately unimodal in the corres-
ponding frames and an appropriate threshold value could not be found easily. Also, even if
the resulting histogram is bimodal, a threshold value which differs slightly would give slightly
different results. Therefore, errors of a few percent are expected and should be kept in mind
when interpreting the data. The data from the three trials, shown in different symbols, are
very consistent as indicated by the small variations in the results. The percentage contact
rose quickly to 40% with a contact force of only 0.25N. As the contact force increased to 3N,
the percentage contact rose more gradually to about 60%.
98
------·----·---
-- ···------
- --
---
-111
1-
Subject:CH Specimens: hard(x), medium(+),soft(o)
-A
7U
o
:
:
o
60
o: aD
o-
:
50
0
C
-40
+ ++
o
:
+
+++
0
o0
°
oC
+
x
X
+
+
x
a
30
x
Co%
++
E 30
a
x
-
X
xX
x
X
xx
a-
x
20
+
xx X
xxxx
ox
10
x
XX
. ...
I
IX
0
...:
:
,
I
0.5
1
1.5
2
2.5
Contact Force (N)
3
3.5
4
Figure 4-18: Percentage contact results from various soft specimens used for subject CH.
Subject:CT Specimens: hard(x), medium(+),soft(o)
-A
80
+
70
O
8
++
+ O
+
+§++++X
'n
g60
cP.
.. ..
.
.....
xx..........
+. ,
x
o
c 50
0
'
! 40
......
.
+
++
.............
.
:
.......
x
'$
i
_ 30
X+
0
20
o
x
"
+
4
X)
OX +
/?~
4
+
/. x ++
10
: ..
n
0
I
I
1
2
I
I
3
4
Contact Force (N)
I
I
5
6
7
Figure 4-19: Perc entage contact results from various specimens used for subject CT.
99
____1_I_I
Ill-----·II(LII-
^L .^.I
---- --
Subject:JK Specimens: hard(x), medium(+),soft(o)
Orz _
u70
I
70
o
60
o
0
o0
o000 o
I
+
.
50
o
o
a,
0
40
0
Y 30
t.
10
II
I
_1
0
II
O
.++
++
+
+
-Xx
x
x
x
x
++
+
++
x
x
A
x xx
X
r
20
00
++
0°
m
I
1
2
I
3
4
Contact Force (N)
5
6
7
Figure 4-20: Percentage contact results from various specimens used for subject JK.
Specimen:hard Subject: CH(o), CT(x), JK(+)
(U
iX
xx
x
60
F
+
+xx
++
+
50
xX
-
O
XO
%+
X
0
co 40
+
cJ
0
+
a)
cn
00
0
0 0
c 30
+o
x
0,
a.
00 X
+
o0
X ,
o
0
+oto
tL
20
10
II
III
I'
0
1
2
3
4
5
6
7
Contact Force (N)
Figure 4-21: Comparison of percentage contact results from various subjects for the hard
specimen.
100
·--- ------- ··------------- ·
·-·---·-·- --·---
-----------------------
·IIYi-----·I
Specimen:medium Subject: CH(o), CT(x), JK(+)
80
x
xx
x
70
+
60
x++
x
x
xx++ +
O50
40
x
30x
2
10
xX
x~x
xx
0
1
2
3
4
Contact Force (N)
5
6
7
Figure 4-22: Comparisonl of percentage contact results from various subjects for the medium
specimen.
Specimen:soft Subject: CH(o), CT(x), JK(+)
9U
Ac
80
x
x
W, x?<+
+ *
70
++
x
+x xX+
g60
0)~0O
x
+
+0
x
g
+
++ CD0
++
O0
so
0
o0
V 40
30C
20 dx
X
10
I
II
fi
0
1
2
3
Contact Force (N)
4
5
6
Figure 4-23: Comparison of percentage contact results from various subjects for the soft
specimen.
101
il·___
-0_.·^-11-111
.-^I---lll·-1 -1^1.
·^
The results of contact experiments with harder specimen AB4 which has an objective
compliance of only 0.086mm/N are shown in Figure 4-17. For the three trials conducted,
there is slightly more variability among the results compared to those for the soft specimen.
The resulting percenta.ge contact was only about 40% at 3N force, which is significantly less
than that for the soft specimen. The results for the three different soft specimens used are
compared in Figure 4-18 for subject CH. The results from subject CT and J
for various
specimens are shown in Figures 4-19 and 4-20, respectively. The percentage contact area. is
generally lower for the specimens with lower objective complliance. Comparison of the results
for the three subjects in contact with various specimens used is shown in Figures 4-21 to
4-23. Although there is some variability among the results for different subjects, the effect of
subject was not as obvious as the effect of specimens.
4.5.3
Description of slip
To observe contact phenomena accompanying slip, the videomicroscopy system was setup to
record the contact region as the subject actively stroked the fixed Plexiglas specimen across
the field of view of the camera.. By viewing the image sequence composed of frames taken 50
msec apart, one realizes that as the shear force applied on the finger increases, slip between
the fingerpad and the plate starts from the border of the contact region. The region which
remains stationary in the center shrinks as time progresses. Eventually, the whole contact
region slides as a whole across the surface of the plate and the image of the contact region
remains unchanged as in rigid body translation. The figures described below illustrate this
phnenomenon in greater detail.
The relative motion of the finger ridges can be observed by comparing the scan-lines of
two adjacent frames. In Figure 4-24, images A and B are 50 msec apart in time. Although
they look very similar to the eye, there are slight differences in the locations of the finger
ridges, especially in the left and right portions of the image. The gray scale variations on
line 240, the middle horizontal line of the 640 by 480 size images, is plotted in the lower left
graph. The gray-scale variation from image A is plotted as a solid line and that from image B
is plotted as a dotted line. The dotted line mostly coincides with the solid line in the middle
portion of the scan line and leads the solid line on the two sides. The differences of the two
scan-lines are shown in the lower right graph.
The movement of the finger ridges in consecutive frames is depicted in Figure 4-25. The
102
--.......-
~I. .
-i^
-- ll- l··C -- 11
1-- - · ~
1
11
Image A
Image B
Lines 240 from A and B
Pixel Gray Scale Difference
180
a,
160
C
a)
C)
at
O 140
cc
x
.C
120
0
100
0
200
400
Pixel Number
600
U
ZUU
4UU
bUU
Pixel Number
Figure 4-24: Typical images and scan-lines from contact between a fingerpad and a Plexiglas
plate when slip started to occur on the boundary.
103
_^II_·____I___·_^_(_I_I_·II_·____1YL_1
--.--ylil-_^l(--LIP---·IIIC-
----- _I
-I--·l-·r----_l
----
111
--·----
Image 1, Line 240
a,
I
r
1!_
I
I
I
I
I
I
I
I
Ce
0
I
III
i
Image 2, Line 240
Image 3, Line 240
Overlapped Scan-lines
CO
Figure 4-25: Comparison of gray scale values on a scan-line in a sequence of images at the
incipience of slip.
top three graphs consist of gray scale variation on a scan-line in the center of three consecutive
images while the bottom graph is a superposition of the three. Grid lines are provided for
easy comparison of finger ridges. By comparing the finger ridges, it is concluded that the
middle region has not moved yet in al! the three frames which occur over 150 msec in time.
whereas the two ends have already moved an observable amount. The distances between
ridges on the left side of the graph are stretched whereas the middle region is still stationary.
In contrast, the distances between the ridges on the right are compressed.
Although this phenomenon of slip starting from the boundary and propagating inwards
can be seen vividly by playing the recorded image sequences in real-time, it is difficult to
present such results in stationary pictures on a single page. By superimposing the finger ridge
outlines of the image sequences, such effects can be seen more easily. The left hand graphs
of Figure 4-26 are three images from the slip sequence. The outlines of the finger ridges are
obtained by morphological operations, as explained in the image processing section. In the
upper right graph, the outlines of the first image is shown. In the middle, the outlines of both
first and second images are shown. This is created by performing a logical OR operation
104
-1I_-·I-I1--·-*I
I^-C------.-*CI^--- I-----·-·-- ---
-
-
from the two outline images. In the bottom, the outlines generated from the three frames are
shown. By comparing the three outline graphs, one sees immediately that the regions in the
middle have not moved while the borders have moved an appreciable amount.
4.6
4.6.1
Discussion
Contact phenomena
The development of contact
Based on the images and force data obtained from the low magnification experiments using a
rigid Plexiglas plate, our understanding of the development of contact has beenl enhanced. By
combining the information available in variables such as nominal (overall) contact, areas, actual contact areas, and contact forces, various pieces of information generated during contact
can be calculated (see Figures 4-13 and 4-14). Surprisingly, the actual contact area. increased
slowly as compared to the nominal area during the indentation, which indicates presence of
viscoelasticitv in the fingerpad. At the same time, the actual mean contact pressure did not
vary much as compared to the rate of change in nominal mean contact pressure. On the other
hand, the percentage contact increased during the indentation phase and remained roughly
constant during the retraction phase.
The results from visualization of contact region showed a considerable difference between
loading and unloading in terms of contact pressure, contact area and the percentage contact
inside the nominal contact region. Soft tissues which make up the fingerpad can be llodeled
according to Fung's [16] quasi-linear viscoelastic model, which was proposed to explain the
mechanical properties of biological tissues with a response consisting of an elastic response
and a reduced relaxation function. The increased actual area of contact during the loading
phase can also be thought of as more and more springs coming into contact from each of
the finger ridge (small contact islands growing bigger and getting connected and the ridges
growing fatter due to increases in the contact force applied). During the unloading phase,
however, the same springs do not retract due to viscoelastic effects (as shown by the slow
decrease of actual contact area in Figure 4-14).
Instead, it is likely that the stiffness of
each spring reduces as the contact force is reduced. Eventually, the ridges get thinner and
disconnect and finally disappear.
105
1_11_^1
.1. 1
.----111_11- 1 -_i__-P--LII*1_IIIII I1I
-----_1_---·-
Image 1
Outline 1
[*
.
l
I
I
Image 2
Outline 1+2
,
i
I
Image 3
I~~~~~~
I
Outline 1+2+3
.
I
·I-s~~~~~~~~~
U
I
Figure 4-26: Visualizing the slip sequence in action by combining images processed by the
outlining procedure.
106
·--------- ·-----------------
--- -- ------·---·-----·-·
------ - -----------c-
----'
The hypothesis of pressure distribution
Although the contact information discussed used mean pressure inside the contact region, the
actual distribution is quite likely to be non-uniform. Without high resolution pressure sensor
arrays, the pressure distribution cannot be measured directly.
The pressure distribution
that one would expect from contact mechanics [23] is parabolic in nature, assuming that the
materials in contact are linear.
If we assume that the material properties of the individual finger ridges are similar, the
static friction coefficient between the finger ridges and the Plexiglas would also be similar.
During active slip, we observed that the boundaries of the contact region slipped first, whereas
the center of the contact region remained stationary. One reasonable hypothesis for the border
to slip first is that the pressure distribution on the contact region is in fact not uniform.
The pressure in the middle is probably higher than that in the surround, as expected from
mechanics. Therefore, the shear force overcomes the static friction at the borders first and
the middle slipped only when the shear force fully overcame the frictional forces. In addition,
during such a process, the finger ridge distances in the front portion of the motion get
stretched because the middle region has not moved yet and the ridges on the back portion of
the fingerpad get compressed. From a neurophysilogical viewpoint, the skin stretching and
compression could be sensed by the mechanoreptors in order to detect the incipience of slip
(Srinivasan et al [43]).
4.6.2
Contact information available for softness discrimination
During softness discrimination experiments using normal fingers to perform discrimination,
the subjects had tactile information from the contact region in addition to kinesthetic information. From the visualization of fingerpad contact with soft specimens, we know that the
overall contact areas were about the same for the hard (0.086mm/N), medium (0.188mm/N),
and soft (0.304mm/N) specimens when the contact forces were up to N (Figure 4-15). The
percentage contact areas were, however, significantly different (Figures 4-18, 4-19, and 4-20)
for specimens of various softness. Thus, if we assume that the overall contact areas were
about the same for the different specimens even for higher contact forces, the percentage
contact areas and/or the pressure distributions could be the cues for subjects to discriminate
object softness.
107
Since the subjects reported that the discriminations were based on the indentation portion
of the contact, the retraction portion of the fingerpad contact was not important for this
task. When the subjects wore thimbles, the contact interface conditions were different from
the normal finger conditions. The tactile information which allowed the subjects to have fine
softness discriminability was eliminated and the subjects' performance degraded significantly.
\\hen the subjects had thin (0.06Gmn) finger cots on, the performance was not statistically
different from the normal finger, which suggests that the finger ridge level details are not
important for discriminating the specimens used.
4.6.3
The role of contact mechanics in haptic interaction
During haptic interaction with objects, be it exploration or manipulation, tactile sensory
information originates directly from the contact region. The development of contact region
depends not only o
the gross properties of objects and fingers, but also on the detailed
mechanics of contact, the underlying pressure distributions, as well as the history of the
contact. For a seemingly simple task such as handling an egg during its transportation from
the refrigerator to the kitchen counter, our fingers need to exert the right amount of force to
not break or drop the egg.
From the visualization of the slip phenomenon, we see that slipping of the finger ridges
near the boundaries of contact occured first, which caused the finger ridges to stretch in front
and compress near the back. These relative movements of the finger ridges will most likely
cause the mechanoreceptors underneath the skin to respond and, through the central nervous
system, notify the brain about the incipience of slip, so that the brain can activate the motor
subsystem to take appropriate actions to avoid objects from slipping through our fingers.
During indentation, the fast growth of the overall (nominal) contact region allows the
contact forces to be distributed across a large region in. a short period of time to provide stable
contact. The actual area of contact developed more slowly in the meantime, as described
in the sections on contact areas. The retraction or unloading portion of the contact showed
mechanisms that provide as large an area of contact as possible by reducing the actual
pressure, but maintaining the overall contact area for a prolonged period of time to provide
stable contact.
With these additional insights provided by this study on contact visualization, it seems
clear that the same kind of contact process which depends a lot on the mechanics of contact
108
has to happen in order to achieve successful haptic interaction with more complex objects
as well. It may also be helpful to design robotic fingers to have similar relationship among
contact forces, nominal areas, and actual areas.
109
Chapter 5
Conclusions
5.1
5.1.1
Main results
Softness discrimination
To measure the abilities of humans in discriminating softness with their fingerpads by active
touch (with eyes closed), a specimen presenter system was built to randomly present the
softness specimens for the discrimination task. Two experimental paradigms involving one
and two index fingers were used; three finger-contact interface conditions were tested (normal,
finger cot, and rigid thimble). The results from the three different finger conditions show that
the fine detailed finger ridge level tactile information is not necessary for the task because
discrimination with the finger cot is as good as with the normal finger (see Tables 2.3 and 2.4).
But when thimbles were present, the dramatic degradation in discriminability demonstrated
the absolute necessity of tactile information to achieve normal resolution.
In order to look into the strategies and underlying mechanisms used during the softness
discrimination process, an experimental paradigm involving the two index fingers from both
hands was used. The performance under both normal and finger cot conditions improved,
which could be attributed to the fact that in this paradigm, the subjects need only to rely
on immediately available sensory information and not on memory. When the peak forces
applied with normal finger on the two specimens by each subject are compared, three different
strategies stand out: (1) to achieve the same amount of deformation of the two specimens
by exerting higher forces on the harder specimen, (2) to compare the contact information
obtained by applying the same amount of pressure on both specimens (thus higher peak
110
forces on the softer specimen), and (3) to apply the same amount of peak forces on both
specimens and compare the deformations.
Although one of the subjects consistently applied higher forces with the right hand, the
subject's performance did not seem to be affected, implying that the brain can compensate
for such differences.
5.1.2
Force control
In the force control experiments, subjects were asked to achieve and maintain a constant
contact force by pressing their fingerpads on specimens with the following experimental parameters: object softness, contact interface condition (normal, finger cot, thilmble), target force
magnitude (2N, 4N,
N), visual feedback availability, and the hand used. Statistical tests
on the results indicated that the errors from tracking with visual feedback was significantly
lower than wlhen the subjects had to maintain the force without visual feedback. The abilities of the subjects to control forces on specimens of various softness under the three finger
contact interface conditions were not significantly different. The errors were higher when
controlling a. higher target force. In addition, significant differences were found between the
force control abilities of the two hands for the subject who showed handedness in the softness
discrimination experiments.
5.1.3
Contact visualization
A real-time imaging setup which integrated a.videomicroscopy system with a tactile st.inulator
system by means of a custom made communication interface was developed. This system
allowed both the contact images and the contact forces to be digitized in real-time. This
setup was used for visualizations of the overall and actual contact areas as well as for detailed
observation of the phenomenon of slip.
Various image processing techniques were developed and applied in order to obtain contact information from the digitized images. The images of the contact regions were improved
by first applying homomorphic processing for contrast enhancement and then performing
a global thresholding or scan-line processing. Homomorphic processing is better suited for
images with larger contact regions, since it is likely to produce a a bimodal histogram which
benefits the thresholding step for converting the original image into a binary image consisting
of contact and non-contact regions. The overall contact area in each image was estimated
111
by using a modified wedge-ring approach to determine the approximate boundaries of the
contact images obtained with low magnification.
Based on the images and force data obtained from the low magnification experiments using rigid Plexiglas, and examining the mean pressure on the contact regions, various sources
of tactile information such as overall contact areas, actual contact areas, percentage contact, nominal mean pressure, and actual mean lpressure were calculated. Surprisingly, the
actual contact area. increased much more slowly than the nominal area. during the indentation. But the actual contact pressure did not vary as much as the nominal contact pressure
during indentation. On the other hand, the percentage contact increased steadily during the
indentation and remained roughly constant during retraction.
The results of visualization of the fingerpad in contact with soft specimens showed tha.t the
overall contact areas were about the same for various specimens for contact forces up to N.
However, the percentage contact area. inside the contact region obtained from high magnification images showed significant differences for the hard (0.086mm/N), medium (0.188am/N),
and soft (0.304mm/N) specimens.
From the visualization of the slip between the fingerpad and a rigid Plexiglas plate, it
was shown that slipping first occured only near the boundaries of contact, which caused the
finger ridges to stretch in front and compress near the back. These relative movements of
the finger ridges most likely cause the mechanoreceptors underneath the skin to respond and,
through the central nervous system, notify the brain about the incipience of slip. The brain
can then activate the motor subsystem to take appropriate action to avoid slipping of objects
through our fingers.
5.2
5.2.1
Implications and applications
Human haptic interaction with soft objects
Although the process of the haptic interaction with objects, which generally involves multimodal perception, and intersensory integration during exploration or manipulation, is complicated, our understanding of the process has been improved by this investigation of the
phenomenon from three different perspectives: discriminability, force control, and contact
visualization.
The abilities, at the behavioral level, to distinguish fine differences in object softness
112
without useful visual and auditory information are likely to depend on both tactual perception and motor control. The subject with poorer performance in controlling forces without
visual feedback of force, also did not do as well in discrimination when compared to the
other subjects. Memory does play a, role in discriminability as shown from the significant
improvement in the results for all subjects when using both index fingers to discriminate the
two specimens. Although subjects may exhibit handedness as shown from the differences in
force control ability of the two fingers and the large difference of forces fised during discrimination, the ability to discriminate was not impaired, which indicates that the brain was able
to accommodate for handedness during the cognition process.
Since tactile information is essential to achieve nornmal softness resolution, the mechanisms
for discrimination must rely on the spatio-temporal profiles of various contact variables.
However, as seen in the visualization experiments, our finger has the property of developing
the nominal contact area quickly even with a small force. The overall contact areas were
about the same for specimens of different softness for forces up to N. But the actual contact
areas were very different. based on high resolution images obtained with high magnification.
Assuming that the overall contact areas were also about the same for specimens of different
softnesses at higher contact forces, the information used during discrimination is probably
the spatio-temporal distribution of the pressure over the nominal contact region. According.
to Srinivasan and LaMotte [42][40][41], this information can be signaled by mechanoreceptors
of the type SAI (Merkel cells) and RAI (Meissner corpuscles).
5.2.2
The pressure distribution hypothesis
If the material properties of the individual finger ridges are assumed to be similar, the static
friction coefficient between individual finger ridges and the Plexiglas would also be similar.
In the visualization of the slip phenomenon, we observed that the boundaries of the contact
region moved first whereas the center of the contact slipped last. The slip front moved
gradually inwards during the process and then disappeared, at which time the finger ridges
seemed to translate as a rigid body. One reasonable hypothesis for the boundaries to slip first
is that the pressure distribution on the contact region is in fact not uniform. If the contact
pressure in the middle is higher and decreased either linearly or non-linearly until it reached
the edge, the observed slip phenomenon can be explained as due to Coulomb friction laws.
113
--------- ____
~^
I_
~ II__
5.2.3
Slip detection
During the slip process, the finger ridges at the boundaries overcome the static Coulomb
friction first and moved relative to the center of the contact region. The middle portion only
slipped when the total shear force overcame the total frictional force. The inter-ridge distance
in the front portion of the contact region got stretched because the middle region ha.d not
moved yet. In contrast, the ridges on the back portion of the fingerpad got compressed. From
a. neurophysiological viewpoint, the skin stretching and compressing could be the mechanical
stimulus sensed by the mechanoreceptors and the corresponding neural impulses transmitted
to the brain could be used for slip detection and prevention.
5.2.4
Dexterous robot finger design
If we inagine the human as the ultimate robot, then building a dexterous robot should borrow
as much of the human system design or functionality as possible. D'uiing object manipulation,
the control of contact forces is a. major concern. An ideal dexterous robot finger should be
able to maintain stable contact with objects having a wide range of properties. Although an
intelligent control system which drives such a robot can use force sensors available in the
various joints to sense the environmental properties and to perform dexterous manipulations,
it would be beneficial to construct robot fingers that can exhibit some of the desired contact
phenomena revealed in this study. The development of a robot fingerpad with a fast growth
of the overall (nominal) contact region as contact forces are increased allows the contact
forces to be distributed across a large region in a short period of time to provide stable
contact. The actual area of contact needs to develop gradually, in the meantime, so as to
provide a gradual increase in contact pressure. During the retraction or unloading portion
of the contact, if the mechanisms were to maintain a large area of contact even when force
dropped, the actual pressure would reduce and the contact would be more stable. The other
benefit of providing a large contact surface as opposed to a point contact (as in the case of
a rigid robot finger) is to simultaneously avoid crushing of objects with the same amount of
force but lower pressure and prevent slip with a lower force to conserve energy.
114
_·.111111111
·--
-·
I
5.2.5
Biomechanical visualization
The videomicroscopy and tactile stimulator systems developed during this study are powerful
tools to investigate the underlying mechanics of contact. The videomicroscopy system was
used by Dandekar [10], a recent Ph.D. from Touchlab, MIT, to successfully obtain images of
the fingertip required for 3D reconstruction and the surface deformation experiments which
were useful in verifying finite element models of the fingertip. The real-time imaging setup
has proven to be very useful in revealing the underlying mechanics of contact. Several pieces
of contact information, such as the overall contact area., actual contact area, nominal contact
pressure, and actual pressure, were measured based on the image and force data..
The
observations of slip led to the hypothesis of non--uniform pressure distribution within the
contact region which is yet to be proved in the future, possibly with high resolution tactile
sensor arrays. Other possible experiments include observations of the finger ridge deformation
as the fingerpad performs scanning motion to detect surface irregularities.
5.2.6
Automated fingerprint identification system
Automated fingerprint identification systems could benefit from the results of this study. In
terms of real-time fingerprint image acquisition, the developed videomicroscopy system is capable of not only static images but also dynamic images. The slip phenomenon, prerecorded
for each individual using the system, can be used as test. Such operation reduces the risk of
beating the system with artificial impostor fingers, which would not have the same mechanical
properties as live, real, fingers of a particular individual. The scan-line processing techniques
can be implemented in real-time to convert the fingerprint images into binary format, for
identification or storage purposes. As for image storage, a typical compression ratio of 30
was obtained by applying LZW compression algorithms, widely used in Unix systems, to
the binary fingerpad images to achieve lossless compression. With lossless compression, the
minute details of the finger ridges, sweat pores, and the small islands between ridges can be
preserved. These techniques can be used to replace the high quality lossy compression standard, Wavelet Scalar Quantization (WSQ) [3] [4], currently adopted by the Federal Bureau of
Investigation (FBI).
115
---IIIIIIIYL -^---I------ ^Il_·ll^-IIU
-^- 1 1111111^
^·1^-·-
1 -I·
Appendix A
Softness Discrimination: Analysis of
Applied Forces
This section presents the graphs similar to Figure 2-13 for the peak forces used in S-2AFC
discrimination tasks. Pea.k forces on soft specimens versus peak forces on hard specimens for
subjects CHI, CT, and JIK under normal, finger cot, and thimble conditions are plotted. The
four panels are for the four specimen pairs. The data were pooled from 3 experimental runs,
64 trials each, conducted for each of the experimental conditions. The percentage of correct
calls, confusion matrix (labeled CNM), and force-specimen-correctness matrix (labeled FsM)
a.re also shown in each panel.
116
^_
·L__
-·IIIIIYI-·ll
I
Ill^ll_X-
-----
-
I
--
I
--
--
Data: chdr2cr3.fln, Spe. Diff.: 3.0%
Data: chdr3cr3.fn, Spe. Diff.: 6.7%
... ... .. ..... .... .... I.... ... ...i
Correct(%): 76
40 CM:- 72/24/22174 ................
FsM: 76/30/70/16
....... ....
.. ...
Correct(%): 74
z 40 CM: 72/24/ 25 71 ......
FsM: 81/30/ '62/19
..... ...
30
.... ......
30
0
·
a)0
-&a
~~
.............
.A
o
~
30
0
c
a0
20
U.
a
C 10
. .10
10
20
30
40
Peak Force on Hard (N)
Data: cher3cr3.fin, Spe. Diff.: 16.2%
10
20
30
40
Peak Force on Hard (N)
Data: chfr3cr3.fln, Spe. Diff.: 28.1%
Correct(%): 91
'40 CM:-86/10/ 8/88
FsM: 86/ 8/88/10
U)
'40
30 i ...........
0
...... .... ...-
1 t/,/ W 1~1
...... - :
.
FsM: 94/ 3/95/ 0
.
.I . .... ..... .....
0
.
. .
.. .....
o
a)
a)
... ...0.:
0 20 I
U-
0 20
a)
.}
U-
Q)
c
C orrect(%): 98.
t;M:
·
.
.
co
10 .................
10
..............
.....
.
10
0
20
30
40
Peak Force on Hard (N)
10
.
. .
20
30
40
Peak Force on Hard (N)
Figure A-1: S-2AFC Peak force plot for subject CH under normal condition.
Data: ctdr3cr3.fln, Spe. Diff.: 6.7%
Data: cter4cr3.fln, Spe. Diff.: 12.2%
.. ..... ... .. .....I ...... ....... ..... .....
Correct(%): 65
z40 CM: 73/23/44/52
FsM: 59/39/66/28
c
......... . ,,,
c 30
Correct(%): 82
40 CM . 76/20/14/82 ............
FsM: 63/21/95/13
.......- ..
x!
0
.....- O
0
o
......
0
o
a)
30 ..
0 1 1"
a)
o 20 t
0 . .. I. .
0
0 20
U-
LL
.........
_)
a )
10
o 10
10
20
30
40
Peak Force on Hard (N)
Data: cter3cr3.fln, Spe. Diff.: 16.2%
10
20
30
40
Peak Force on Hard (N)
Data: ctfr3cr3.fln, Spe. Diff.: 28.1%
Correct(%): 83
40 CM: 80/16/1779 .............
FsM: 64/17/95/16
Correct(%): 92
z'40 CM: 86/10/ 5/91.................
FsM: 65/10/112/5
-o
C 30
o0 3
o
0
0
30
0
o
00 .6: .......
t 20
. .. . ... .
0 20
U:
.
.
10
o 10
CL 10
O
2
10
10
20
30
40
Peak Force on Hard (N)
20
30
40
Peak Force on Hard (N)
Figure A-2: S-2AFC Peak force plot for subject CT under normal condition.
117
'1-
'-"~"""~1~~1-``'"l~-sl"--pl""
--11·1lr·---*-
-
-
--·-
Data: jkdr2cr3.fin, Spe. Diff.: 3.0%
..... ....... ..... ...
.
Data: jkdr3cr3.fln,
*rx
z 40
Spe. Diff.: 6.7%
.
z'40
o
0
U)
c 30 ...o
.)
U)
..... .....
..........
0
a~~~~al
0 . .:.
, 20
'q4' '4''
...
o 20
U-
LL
C 10
10
(o
Correct(%): 79
:.....
CM.: 67/29/12/84 .... :- -FsM: 84/12/67/29
10
20
30
40
Peak Force on Hard (N)
Data: jker4cr3.fln, Spe. Diff.: 12.2%
z 40
.
U)
..
. ..
..
Wbx
. . ..
. ..
0
C)
r
10
C
a)
.
....... .. ..
Correct(%): 84
10 CM: 76/20/10/86FsM: 86/10/76/20
10
20
30
40
Peak Force on Hard (N)
Data: jker3cr3.fln, Spe. Diff.: 16.2%
z 40
0
-
c 30 ...
-LL
30
...
30
Correct(%): 96.
o 20
IL
Correct(%): 93
CM:- 83/13/ 0/96 ..
FsM: 96/0/83/13
10
20
30
40
Peak Force on Hard (N)
Correct(%): 96
c)
C 10 CM:' 89/ 7/ 0/96
- ;FsM: 95/0/90/ 7
10
20
30
40
Peak Force on Hard (N)
Figure A-3: S-2AFC Peak force plot for subject JIK under normal condition.
Data: chdr2cr2.fan, Spe. Diff.: 3.7%
Data: chdrlcr2.fan, Spe. Diff.: 4.9%
Correct(%): 79
z'40 CM.:- 76 /2021/75....
FsM: 75/21/76/20
Correct(%): 80
2z40 CM: 80/16/23/73
FsM: 73/23/80/16
o
.......................................
030
a
....:
............ - - .. ....: .. ......
''
...... ..
c 30
...
20
co
U. 1
)0
o."10
a 10
10
20
30
40
Peak Force on Hard (N)
Data: chdr4cr2.fan, Spe. Diff.: 8.7%
A--IW
5.. :.........
T "C&AR
....... .)Iw .....
. ...... .
:.....
:: ...........
:.....
10
20
30
40
Peak Force on Hard (N)
Data: cher4cr2.fan, Spe. Diff.: 13.1%
Correct(%): 88
z'40 CM: 85/1 1/12/84 ................
FsM: 83/12/86/11
0
U)
..............
..........................
c 30
Correct(%): 95
z40 M- 90 6/ 4/92 ......
FsM: 92/ 4/90/ 6
........
..
03
c 30 .
o
0
..................
20
o 20
)
0 10
-....o...... ...... .. ...... .......
10
L10
20
30
40
Peak Force on Hard (N)
..
_
10
20
30
40
Peak Force on Hard (N)
Figure A-4: S-2AFC Peak force plot for subject CH under finger cot condition.
118
I-
Data: ctdr4cr2.fan,
Data: cter4cr2.fan, Spe. Diff.: 13.1%
Spe. Diff.: 8.7%
Correct(%): 79
z'40 CM-: 72/24/17-/79 .....................
FsM: 66/22/85/19
Cor:rect(%): 61
40 CM:- 64/32/43/53 FsM: 58/37/59/38
o
....
c 30
.... .. ...
i -C·-01··
-;~
0
0
0
o 20
...
.
x
..........
LL
....... ..1 .
.....
0 20
LL
a3
0)
0 10
fi
10
1
I
.
10
20
30
40
Peak Force on Hard (N)
Data: cter2cr2.fan, Spe. Diff.: 16.7%
Correct(%): 86
z40 CM: 85/11/16/80 .....
FsM: 60/16/105/11
o
0
c 30
C 30
0
- ... - I .. -
~
·
20
30
40
Peak Force on Hard (N)
Data: ctfr2cr2.fan, Spe. Diff.: 28.4%
Correct(%): 84
z'40 CM: 80/16/15/81 FsM: 70/16/91/15
0
o
·
10
0
o
· -·
a
0 20 ..
o 20
LL
ua
a)
10
10
10
20
30
40
Peak Force on Hard (N)
10
20
30
40
Peak Force on Hard (N)
Figure A-5: S-2AFC Peak force plot for subject CT under finger cot condition.
Data: jkdr2cr2.fan, Spe. Diff.: 3.7%
..... ...... ...
z 40
Data: jkdrlcr2.fan, Spe. Diff.: 4.9%
................
zv 40
o
Co
c 30
C 30
0
a,
0
0
o
a,
Corect(%): 83.
Correct(%): 83
CM:
75/21/11/85
a,
o10 6sM: 80/1 1/80/21
CL
CorMrect(%): 83
CM: 77/1/14/82
FsM:- 54/20tl 05/13
0
0 20
_ 20
la
a
Q
10
10
20
30
40
Peak Force on Hard (N)
Data: jker4cr2.fan, Spe. Diff.: 13.1%
10
20
30
40
Peak Force on Hard (N)
Data: jkdr4cr2.fan, Spe. Diff.: 8.7%
.........................................
z 40
... .... ..... ...
......
Co
0
Co
C 30
c 30
0
aI
0
0
0 20
rrect():
.. .. 91
Correct(%): 91
CM: 85/11/79
0
0.10 FsM: 82/.7/92/t11.
10
i.
z'40
a
·
0
.. ..........
I
20
a)
aa10
10
Correct(%): 96
CM: 90/6/2/94 o
FsM: 93/ 2/91- 6
10
20
30
40
Peak Force on Hard (N)
..
20
30
40
Peak Force on Hard (N)
Figure A-6: S-2AFC Peak force plot for subject JIK under finger cot condition.
119
-
-111
Data: chht2cr6.frn, Spe. Diff.: 55.0%
Data: chfr6cr6.frn, Spe. Diff.: 30.8%
Correct(%): 55
z 40 CM 51/45/41/55.
Fs1M: 56/38/50/48
Correct(%): 68
2z40 CM: 65/3-1/30/66 ....
FsM: 65/30/66/31
U)
30
30
30
0
ao
...
~
,20
a)
:o:
o
.
0!
10
-......
:
20 I
0
a)
~x
LL10
10
40
20
30
Peak Force on Hard (N)
Data: chit2cr6.frn, Spe. Diff.: 77.1%
10
:
a)
10
....
':
10
x ......
!......
40
Correct(%): 89
'40 CM: 82/14/ 8/88 ......
FsM: 88/ 8/82/14
o
a)
o30
o
o 20
U-
30
1Peak0 20
30
40
Peak Force on Hard (N)
Data: chjt2cr6.frn, Spe. Diff.: 110.3%
... ..
..
Correct(%): 76
z'40 CM:- 68/28/18/78 .......-.....
FsM: 78/18/68/28
v
0
c 30 . . I . . . .: . .. . . .
20
10
.. .... . ... .I
..
:OD
i.
. .....
..
.....
0
~
O
10
20
30
40
Peak Force on Hard (N)
10
20
30
40
Peak Force on Hard (N)
Figure A-7: S-2AFC Peak force plot for subject CH under thimble condition.
Data: ctfr6cr6.fm, Spe. Diff.: 30.8%
z
C
Correct(%): 49
40 CM: 53/43/54/42 ..
FsM: 51/54/44/43
Data: ctht2cr6.frn, Spe. Diff.: 55.0%
Correct(%): 67
40 ·CM -: 68/28/35/61 .............
FsM: 58/32/71/31
....
o
....
...
U)
C 30 I.. .. . .... . ... ... . . : .. ..... . .. .
30
0
0
a
0
L-
20
a-
10
.........
:........ 0~.~~
.... ... ....
..
a)
x
o 20
I.
x
Cu
10
20
30
40
Peak Force on Hard (N)
Data: ctit2cr6.frn, Spe. Diff.: 77.1%
10
20
30
40
Peak Force on Hard (N)
Data: ctjt2cr6.fm, Spe. Diff.: 110.3%
Correct(%): 65
z'40 CM:- 54/42/25/71 ... .............
FsM: 54/40/71/27
Correct(%): 73
z 40 CM-: 74/22/29/6740 FsM: 61/23/80/28
0
30
o
o 20
r
a)
a.10
a)
c 30
0 ....
.
.....:..0.°
.
o
CD
:
..
o 20
-V
a)
a0
.............
o.10
10
10
20
30
40
Peak Force on Hard (N)
10
20
30
40
Peak Force on Hard (N)
Figure A-8: S-2AFC Peak force plot for subject CT under thimble condition.
120
'--I'-`-
`^'"--11^"~~"~~""~""YI-lll-~
11IIIIII
Il--L---
-
--
_-CI
Data: jkht2cr6.frn, Spe. Diff.: 55.0%
. .. . ............... . ....
. ---
Data: jkfr6cr6.fn, Spe. Diff.: 30.8%
z 40
z 40
:
O
:
:
o
C 30
o
0
o
a,
00
30
....
...
, 20
l
10
10
20
30
40
Peak Force on Hard (N)
Data: jkit2cr6.frn, Spe. Diff.: 77.1%
Correct(%): 69
CM: 68/28/31/65
FsM:- 64/31/69/28
z'40
OD
o
c 30
--
..........................
............. ..........
.........
U)
c 30
o
0
a,
o 20
--
20
30
40
Peak Force on Hard (N)
Data: jkjt2cr6.frn, Spe. Diff.: 110.3%
........
o3
x
10
..............
...........
x
o
·..
a,
0
0 20 .. .. ..... ...... . ... ...o
Correct(%): 60
CM': 55/41/36/60
a)
10 · FsM: 59/36/56/41
z'40
.....
a,
.... ..
8..........
..............
LL
Correct(%): 78
CM: 74/22/21,75
a l 10
10 ·FsM: 74/23/75/20
10
. ..
o 20
x
Correct(%): 82
CM: 78/18/17/79
a,
o 10
10 FsM: 53/18/1 04/17
a.
.....
-.
20
30
40
Peak Force on Hard (N)
10
.......
-
20
30
40
Peak Force on Hard (N)
Figure A-9: S-2AFC Peak force plot for subject JK under thimble condition.
121
....-
Appendix B
Softness Discrimination: JND Data
The discrimination results from an experimental run was represented by a confusion matrix.
The matrices from three runs of 64 trials each was pooled together for the calculation of the
sensitivity index d' and the response bias
for a given comparison specimen. Recall that
the JND value is defined as the difference of stimuli which corresponds to a d' value of 1.
The JND value for a particular subject under a given finger condition was then obtained
by averaging the estimates of JND from the four comparison specimens. The data points
which had a d' value less than 0.5 was not included in the mean JND calculations and their
estimated JND values are enclosed in brackets.
122
I__UI)LI1YIIII___I
-I1I^-··1I··II
IU
--
--
-·----
__F_
Specimen
Difference
Confusion
Matrix
/
DR1
2.6%
55 41
29 67
0.70
-0.17
DR5
7.1%
74 22
20 76
1.55
-0.04
ER1
13.5%
74 22
17 79
1.67
-0.09
FR1
31.7%
92
4
1 95
4.04
-0.29
JND (%)
3.8
4.6
8.1
7.8
MAeanJ D = 6.1%
Table B.1: 1I-2AFC discrimination results for subject CH under normal condition (Standard:
CR1 [0.304mm/N])
Specimen
Difference
Confusion
Matrix
d
/3
JND (%)
DR2
3.7%
78 18
13 83
1.99
-0.11
DR4
8.7%
69 27
14 82
1.63
-0.24
ER4
13.1%
91
5
6 90
3.16
0.05
ER2
16.7%
88
8
7 89
2.84
-0.04
1.9
5.3
4.1
5.9
MearnJND = 4.3%
Table B.2: 1I-2AFC discrimination results for subject CH under finger cot condition (Standard: CR2 [0.298mm/N])
Specimen
Difference
Confusion
Matrix
-
/3
JND (%)
ER4
FR4
HT2
53.3%
14.7%
27.2%
54 42 54 42 68 28
37 59 27 69 28 68
0.45
0.74
1.10
-0.08
-0.21
-0.00
48.7
[32.7]
36.9
MeanJND = 43.3%
IT2
75.2%
76 20
18 78
1.70
-0.04
44.3
Table B.3: 1I-2AFC discrimination results for subject CH under thimble condition (Standard:
CR4 [0.293mm/N])
123
"--I-""""I'"1'
----·l--·-UII----I__-LI
-__1II1I1
P
II---
·---
Specimen
Difference
Confusion
hMatrix
'3
JND (%)
DR2
DR3
ER3
3.0%
6.7%
16.2%
72 24 72 24 86 10
25 71 22 74
8 88
1.32
1.42
2.64
0.02
-0.03
-0.06
2.3
4.8
6.1
AleanJND = 4.9%
FR3
28.1%
96
0
3 93
4.43
0.35
6.3
Table B.4: S-2AFC discrimination results for subject CH under normal condition (Standard:
CR3 [0.300mm/N])
Specimen
Difference
Confusion
Matrix
d
13
JND (%)
DR2
DR1
DR4
3.7%
4.9%
8.7%
76 20 80 16 85 11
21 75 23 73 12 84
1.59
1.68
2.35
0.02
0.13
0.03
2.4
2.9
3.7
AMeanJND = 3.2%
ER4
13.1%
90
6
4 92
3.27
-0.10
4.0
Table B.5: S-2AFC discrimination results for subject CH under finger cot condition (Standard: CR2 [0.298mm/N])
Specimen
Difference
Confusion
Matrix
______
JND (%)
FR6
HT2
IT2
30.8%
55.0%
77.1%
51 45 65 31 66 30
41 55 30 66 26 70
0.26
0.95
1.10
-0.05
-0.02
-0.06
58.1
70.2
[117.7]
MeanJND = 57.9%
JT2
110.3%
82 14
8 88
2.44
-0.16
45.3
Table B.6: S-2AFC discrimination results for subject CH under thimble condition (Standard:
CR6 [0.290mm/N])
124
-I.-_11III^LIIX 4-----_·1_-1-___111-·Y·l-·---
-·---XI - - I - ·-
Specimen
Difference
Confusion
Matrix
d
/
JND (%)
DR1
ER1
FR1
2.6%
13.5%
31.7%
46 50 55 41 77 19
32 64 28 68 22 74
0.38
0.73
1.59
-0.24
-0.18
0.05
[7.0]
18.5
19.9
MleanJND = 17.4%o
HT6
47.9%
92
4
4 92
3.64
0.00
13.8
Table B.7: 1I-2AFC discrimination results for subject CT under normal condition (Standard:
CR1 [0.304mnlm/N])
Specimen
Difference
Confusion
Matrix
ld
/
_
JND (%)
DR4
8.7%
60 36
35 61
0.66
-0.01
13.1
ER4
ER2
13.1%
16.7%
67 29 70 26
22 74 29 67
1.26
1.13
-0.11
0.05
10.4
14.8
MleanJND = 14.0%
FR2
28.4%
72 24
17 79
1.60
-0.13
17.7
Table B.8: 1I-2AFC discrimination results for subject CT under finger cot condition (Standard: CR2 [0.298mm/N])
Specimen
Difference
Confusion
Matrix
-d
_
JND (%)
FR4
HT2
IT2
27.2%
53.3%
75.2%
58 38 52 44 63 33
48 48 36 60 22 74
0.26
0.42
1.14
-0.17
0.13
-0.11
65.8
[102.99] [126.06]
MeanJND = 70.2%
JT2
108.0%
72 24
17 79
1.45
-0.05
74.5
Table B.9: 11-2AFC discrimination results for subject CH under thimble condition (Standard:
CR4 [0.293mm/N])
125
-I--·-1IIY---U-P
il ^Il-LII_I_ I---
-
Specimen
Difference
Confusion
Matrix
Id
/3
DR3
6.7%
73 23
44 52
0.81
0.30
ER4
12.2%
76 20
14 82
.87s
-0.12
ER3
16.2%
80 16
17 79
1.89
0.02
FR3
28.1%
86 10
5 91
2.88
-0.18
JND (%)
8.3
6.6
8.6
9.7
AMeanJND = 8.3%
Table B.10: S-2AFC discrimination results for subject CT under normal condition (Standard:
CR3 [0.300mm/N])
Specimen
Difference
Confusion
Matrix
DR4
8.7%
69 27
42 54
ER4
13.1%
72 24
17 79
ER2
16.7%
80 16
15 81
FR2
28.4%
85 11
16 80
d1'
0.74
1.60
1.98
2.17
/3
0.21
-0.13
0.02
0.12
JND (%)
11.8
8.2
8.5
13.1
AMean JND = 10.4%
Table B.11: S-2AFC discrimination results for subject CT under finger cot condition (Standard: CR2 [0.298mm/N])
Specimen
Difference
Confusion
Matrix
d_
/
JND (%)
FR6
30.8%
53 43
5;4 42
-0.03
0.14
HT2
55.0%
68 28
35 61
0.89
0.10
IT2
77.1%
60 36
27 69
0.90
-0.13
JT2
110.3%
74 22
29 67
1.26
0.11
[*]
61.5
86.0
87.6
MeanJND = 78.4%
Table B.12: S-2AFC discrimination results for subject CT under thimble condition (Standard:
CR6 [0.290mm/N])
126
Specimen
Difference
Confusion
Matrix
d'I
.JND (%)
DRI
2.6%
69 27
29 67
1.10
0.03
2.4
DR5
ER1
7.1%
13.5%
64 32 77 19
28 68
9 87
0.98
2.17
-0.06
-0.24
7.3
6.2
AleanJ'ND = 7.0%
FR1
31.7%
88
8
10 86
2.64
0.06
12.0
Table B.13: 1I-2AFC discrimination results for subject JK under normal condition (Standard:
CR1 [0.304mm/N])
Specimen
Difference
Confusion
Matrix
d _
fi
DR2
3.7%
61 35
20 76
1.16
-0.23
DR4
8.7%
68 28
19 77
1.40
-0.15
JND (%)
3.2
6.2
ER4 I ER2
13.1%
16.7%
86 10 86 10
3 93
9 87
3.12
2.58
-0.30
-0.03
4.2
6.5
AMeanJND = 5.0%
Table B.14: 1I-2AFC discrimination results for subject JK under finger cot condition (Standard: CR2 [0.298mm/N])
Specimen
Difference
Confusion
Matrix
d
/3
JND (%)
FR4
HT2
IT2
27.2%
55.0%
75.2%
42 54 57 39 66 30
23 73 19 77 15 81
0.55
1.09
1.50
-0.43
-0.31
-0.26
49.4
50.7
50.2
MeanJND = 49.8%
JT2
108.0%
69 27
5 91
2.20
-0.52
49.0
Table B.15: I-2AFC discrimination results for subject JK under thimble condition (Standard:
CR4 [0.293mm/N])
127
Specimen
Difference
Confusion
Matrix
d
______3
JND (%)
DR2
DR3
ER4
3.0%
6.7%
12.2%
67 29 76 20 83 13
12 84 10 86
0 96
1.67
2.07
3.67
-0.32
-0.22
-0.73
1.8
3.3
3.3
AMlean JND = 3.1%
Table B.16: S-2AFC discrimination results for subject J
CR3 [0.300mm/N])
Specimen
Difference
Confusion
Matrix
d'
/3
JND (%)
ER3
16.2%
89
7
0 96
4.02
-0.55
4.0
under normal condition (Standard:
DR2
DR1
DR4
3.7%
4.9%
8.7%
75 21 77 19 85 11
11 85 14 82
7 89
1.98
1.90
2.66
-0.20
-0.10
-0.13
1.9
2.6
3.3
AleanJND = 2.9%
ER4
13.1%
90
6
2 94
3.57
-0.25
3.7
Table B.17: S-2AFC discrimination results for subject JI under finger cot condition (Standard: CR2 [0.298mm/N])
Specimen
Difference
Confusion
Matrix
d
/
JND (%)
FR6
HT2
IT2
30.8%
55.0%
77.1%
55 41 68 28 75 21
36 60 31 65 19 77
0.50
1.01
1.62
-0.07
0.05
-0.04
61.4
54.6
47.5
MeanJND = 56.1%
JT2
110.3%
78 18
17 79
1.81
-0.02
60.9
Table B.18: S-2AFC discrimination results for subject JK under thimble condition (Standard:
CR6 [0.290mm/N])
128
Appendix C
Statistical Tests on Softness
Discrimination JND Data
The analysis of variance (ANOVA) method [31][24][36] was used to find out whether the
results on softness discrimination were influenced by factors such as finger conditions and
experimental paradigms. The JND estimates from the pooled data for each of the comparison
specimens were used for the calculations of the ANOVA table. To compare any two JND
results obtained under different circumstances, the Student's t test was used. The statistical
analysis was performed by using MATLAB statistics toolbox.
C.1
1I-2AFC experiments
A two-way ANOVA was performed using subjects and conditions as the two factors. The
thimble condition was not included because the data range is very different and it is clear
that there is a significant difference between thimble and the other two conditions. Table C.1
lists the data used for the ANOVA analysis. The ANOVA table genierated by using MATLAB
software function anova2 is shown in Table C.2. The ANOVA analysis provided tests for the
following three hypotheses. First, the conditions differ in performance. Second, the subjects
differ in performance. Third, there is an interaction between the subjects and conditions.
The ANOVA table provides a means to look at variations between groups and variations
within groups. The column SS in the table stands for sum of squares. The df column is
the degrees of freedom for the factors. There are 3 subjects, therefore the df for columns
is 2 (3 - 1). There are 2 conditions, so the df for rows is 1 (2 - 1). The column MS was
129
Condition
Normal
Finger cot
CH
3.8/4.6/8.1/7.8
1.9/5.3/4.1/5.9
Subject
CT
7.0/18.5/19.9/13.8
13.1/10.4/14.8/17.7
J
2.4/7.3/6.2/12.0
3.2/6.2/4.2/6.5
Table C.1: 1I-2AFC data used for the two-way ANOVA table.
ANOVA Table
Source
SS
df
MS
F
Columns
416.3
2
208.2
17.92
Rows
13.37
1
13.37
1.151
Interaction
1.558
2
0.7791
0.06707
Error
209.1
18
11.62
Total
640.3
23
Table C.2: 11-2AFC ANOV'A table. The rows represent the conditions and the columns
represent the subjects.
obtained by dividing S,S b df. The F ratio was obtained by dividing the AlS value for
Columns, Rows, and Interaction by the MS value for Error. By looking up F-distribution
table [47] with degree of freedom pairs of (2,18), (1,18), and (2,18), the 1% points of F ratios
from the table were 6.01, 8.28, and 6.01. Therefore, only the first hypothesis was rejected
because the F value from the ANOVA table (18.46) was larger than the F value (6.01) from
the F distribution. There was significant difference between the subjects at 1% significance
level (the significance is the probability of observing the given result by chance given that the
hypothesis is true). However, the differences between normal and finger cot conditions and
the interactions of subjects and conditions were small, as shown by the small F ratio from
analysis of variance.
A box plot of the softness discrimination JND values obtained under normal and finger
cot conditions of the 1I-2AFC paradigm is shown in Figure C-1. The box has lines at the
lower quartile, median, and upper quartile values. The whiskers are lines extending from
each end of the box to show the extent of data.
Three t tests were performed on the data given in Table C.1 between the subjects' performance under normal and finger cot conditions by using the ttest2 function of the MIATLAB
software. Significant differences of the mean JNDs, at 5% significance level, were repor130
1 -2AFC Box Plot
20
I
X
18
16
14
12
I
I
0
z 10
8
I-I
6
4
2
I1
i
CH-N
e
CH-C
I
I
CT-N
CT-C
Subject-Condition
I
i
JK-N
JK-C
Figure C-1: A box plot of the softness discrimination JND values obtained under normal(N)
and finger cot(C) conditions of the 1I-2AFC paradigm.
ted between subjects (CH,CT) under normal condition and between subjects (CH,CT) and
(JIK,CT) under finger cot condition.
C.2
S-2AFC. experiments
The same type of analysis used on the 1I-2AFC data was performed on the data from S-2AFC
experiments. A two-way ANOVA was performed by using subjects and conditions as the two
factors. The thimble condition was not included because the data range is very different and
it is clear that there is a significant difference between thimble and the other two conditions.
Table C.3 lists the data used for the ANOVA analysis. The ANOVA table generated by using
MATLAB software function anova2 is shown in table C.4. There was significant difference
between the subjects at 1% significance level (the significance is the probability of observing
the given result by chance given that the hypothesis is true). However, the differences between
normal and finger cot conditions and the interactions of subjects and conditions were small
131
Condition
Normal
Finger cot
CH
2.3/4.8/6.1/6.3
2.4/2.9/3.7/4.0
Subject
CT
8.3/6.6/8.6/9.7
11.8/8.2/8.5/13.1
JIK
1.8/3.3/3.3/4.0
1.9/2.6/3.3/3.7
Table C.3: S-2AFC data, used for the two-way ANOVA table.
ANOVA Table
Source
SS
df
MS
F
185.6
2
92.79
42.95
0.04167
1
0.04167
0.01929
Interaction
14.16
2
7.08
3.278
Error
38.88
18
2.16
Total
238.7
23
Columns
Rows
Table C.4: S-2AFC ANOVA table. The rows represent the conditions and the columns
represent the subjects.
as shown by the small F ratio from the analysis of variance.
A box plot of the softness discrimination JND values obtained under normal and finger
cot conditions of the S-2AFC paradigm is shown in Figure C-2. Three t tests were performed
on the data given in Table C.3 between the subjects performance under normal and finger
cot conditions by using the ttest2 function of the MATLAB software. Significant differences
of the mean JNDs, at 5% significance level, were reported between subjects (CH,CT) and
(JIK,CT) under both normal and finger cot conditions.
C.3
Comparison of JND among different paradigms
To compare the effect of the two experimental paradigms, data from the three subjects under
both normal and finger cot conditions were used. Pooling data from all the subjects together
allows us to examine the differences between the two paradigms with higher reliability.
The ANOVA table generated is shown in Table C.5. The two paradigms are represented
by the rows in the table. The columns represent the six groups of data from the three subjects
under both normal and finger cot conditions. The F ratio (16.21) obtained was higher than the
value (7.39) from the F distribution table with degrees of freedom (1,36) at 1% significance
132
S-2AFC Box Plot
12
7-~~~~~~~~I7
10
I
z
I
z
6
[~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
L_
._L_
I
4
[
2
!I
-L
IlI
CH-N
CH-C
CT-N
CT-C
Subject-Condition
I
I
JK-N
JK-C
Figure C-2: A box plot of the softness discrimination JND values obtained under normal(N)
and finger cot(C) conditions of the S-2AFC paradigm.
level. Therefore, we conclude the results from the 1-2AFC experiments are significantly
different from the results from S-2AFC experiments at 1% significance level.
The individual box plots that compare JNDs from the two paradigms for the three subjects
are graphed in Figure C-3, Figure C-4, and Figure C-5, respectively. The results from the
two different experimental paradigms are plotted side by side for both normal and finger cot
conditions. From the box lines (indicating the lower quartile, median, and the upper quartile)
and the whiskers (indicating the extent of the data), we can see that the variation in the
JND values are lower in the S-2AFC paradigm than in the 1-2AFC paradigm. Therefore,
S-2AFC experiments is different from a hypothetical two interval, two alternative, forced
choice paradigm (2I-2AFC) which would have higher variations in the JND values than the
11-2AFC experiments.
133
-1_11_1_1_1_-· I 1-_. ·-·1^111
1
ANOVA Table
SS
df
MS
F
Columns
591.5
5
118.3
17.42
Rows
110.1
1
110.1
16.21
Interaction
43.79
5
8.758
1.29
Error
244.5
36
6.791
Total
989.9
47
Source
Table C.5: ANOVA table to compare 1I-2AFC and S-2AFC paradigms. The rows represent
the experimental paradigms and the six columns represent three sulbjects ulnder both normal
and finger cot conditions.
Box Plot: 11-2AFC vs. S-2AFC
0
z
CH-N-1
CH-C-1
CH-N-2
Subject-Condition-Paradigm
CH-C-2
Figure C-3: Box plot of the JND values obtained under both normal(N) and finger cot(C)
conditions using 1I-2AFC(1) and S-2AFC(2) paradigms for subject CH.
134
LICII·
__..__11I_1III1III^
I IP--·l I-
I
-I
Box Plot: 11-2AFC vs. S-2AFC
20
,
I
!
1
i~~~~~~~~~~~
I
II-
18
lI I
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
I
16
I
I
14
z
12
1~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
i~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
1~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
I~~~~~~~~~~~~~~~~~~~~~~~~~~
10
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
I
8
6_
·
CH-N-1
~~~~~~~~~~~~~~~~~i
·
I
CH-N-2
CH-C-1
Subject-Condition-Paradigm
·
CH-C-2
Figure C-4: Box plot of the JND values obtained under both normal(N) and finger cot(C)
conditions using 1I-2AFC(1) and S-2AFC(2) paradigms for subject CT.
Box Plot: 1I-2AFC vs. S-2AFC
1
1
1
0
z
JK-N-1
JK-N-2
JK-C-1
Subject-Condition-Paradigm
JK-C-2
Figure C-5: Box plot of the JND values obtained under both normal(N) and finger cot(C)
conditions using 11I-2AFC(1) and S-2AFC(2) paradigms for subject J.
135
_ ___I______II1IILI____ll
I C^---P^-.
·-LI--YI-I_---I-PII
1II -1
Appendix D
Force Control Data
Presented in this appendix are the data recorded during the force control experiments under
various conditions.
For each subject, three trials of force data. under the same conditions
a.re plotted on three separa.te pages. There are four rows to each graph which represent the
specimens used. Going from top to bottom are rigid, hard, medium, and soft. specimens.
The Plexiglas was used as the rigid specimen and the three compliant slpecimens chosen had
objective compliances of 0.304lmm/N (hard), 0.455mmnn/N (medium), a.nd 0.608minnl/N (soft).
The three columns represent the data from normal, finger cot, and thimble conditions. The
subject, hand, and trial number are printed on the upper-left corner of the force versus time
graphs.
136
_I)_
___ 1111_·1-.1 1-1·_-1-)·-.1
111 -_1111
-1
Subject:CH Hand:R Trial:1
8
Q)
0
LL
LL
2
5
10
15
8
5
10
Time (sec)
15
8
8
4
4
5
10
15
5
10
15
5
10
15
O:
4
2
2
5
10
15
8
8
iI
.. .
..
5
2
10
... .
15
.. .. . .. .. .
.... ...
8
4
4
N~~~1
'
:
2
2
5
10
15
8
8 .
..--,
'A'
G
0
4
4
2
2
C)
5
10
Normal
15
5
10
Finger cot
137
15
5
10
Thimble
15
Subject:CH Hand:R Trial:2
8
8
z
"o
0)
iE4
UlL
2
2
10
5
8
8
'A ' - - - -
4
2
4
I
...
5
10
1
I
E
4
Q)
.4
r
.
5
10
4
4
2
2
I
15
10
5
4
1
1
I
- ---- .....
.
10
5
Normal
;
4
4
2
2
15
L
:.
.:
10
15
' '' .
FV"L
n
2
15
'......--'''
8
VIV
I
-)
I
d,
5
15
......
~·~·~E~~hii~i...
8
8 ;rv"~"~"?-'
8 ...
'
r
L
10
................
8
l
5
15
10
5
15
N
A.......
fv
2
2
l-f
15
4
. . .......
8
10
, A
.
.
8
-- .
U--
~
O
5
15
10
5
Time (sec)
15
10
5
Finger cot
15
l N'-r-·-L10
5
Thimble
15
138
·---·-··---· ·-·--------- ------------ ----------
-- -·
I I-·---------
Subject:CH Hand:R Trial:3
8
8
z
-c0)
a)
4
4
so
C.
0
LL
2
5
10
2
5
10
Time (sec)
15
15
5
10
15
15
5
10
15
5
10
15
5
10
Thimble
15
. . . . . . .. . . . . .. . . . . . . . .
8
P4
I
2
- ...
.111
1
. ..
I
V-.
5
10
5
15
8
p Af.
10
-A.
8
...
v'" "4
IF-
E
V
4
4
2
2
(1)
2
5
10
15
5
8
I-
4
n3
UO
2
5
10
Normal
15
.,
10
M~r'
15
''c~
8
P~~~~~~~N
|
4
A
2
n._
5
10
Finger cot
15
139
-
--
I
Subject:CH Hand:L Trial:1
8
8
8
4
4
2
2
a,
F 4
0
LL
2
5
10
15
5
10
Time (sec)
15
8
8
8
4
4
4
2
2
2
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
Thimble
15
8
I
E
4
)
22
8
I-o
4
0
Cl)
2
5
10
Normal
15
5
10
Finger cot
15
140
_________1_
_1·_1_·^_1____ __
__C_·_
C_·l_
_·
I
__
Subject:CH Hand:L Trial:2
8
a2
-a
Fr
0
2
5
10
15
5
10
Time (sec)
15
5
10
15
5
10
15
5
15
5
10
15
8
4
I
2
10
8
8
4
4
I
E
=
a)
r2
2
5
10
15
5
10
15
5
10
15
5
10
Normal
15
5
10
Finger cot
15
5
10
Thimble
15
8
I0
4
(I)
2
141
___11111_1111_·11____-1_·-__·*.·-__1*1
Subject:CH Hand:L Trial:3
2
.5)
-a
a)
LL
C
1
u
IV
15
5
10
Time (sec)
15
5
10
15
cc
Ca
a:
5
10
15
5
10
15
5
10
15
E
E
4
c
5
10
15
5
10
15
5
10
15
5
10
Thimble
15
c,
0
wn
C
,
Normal
iu
15
5
10
Finger cot
15
142
_
__
I
I_
Subject:CT Hand:R Trial:1
8
8
2
0)
r4
4
0
U-
2
2
15
5
10
15
10
15
5
10
15
10
15
5
10
5
Time (sec)
5
10
15
5
10
15
5
5
10
15
5
8
Cc
O
c 4
I
2
E
E
7
,
_
10
,
-
1b
II
8
o
0
)
2
10
5
Normal
15
10
5
5
15
_.,A
15
10
Thimble
r-t
VL
I-l
I inntr
143 .
____·IXII__
I--I_
--C-----
.I-I^---
.·I_-
1-.-
_------·111111-
Subject:CT Hand:R Trial:2
8
4
2
5
10
15
10
5
Time (sec)
15
5
10
15
5
10
15
5
10
15
5
10
15
a:
0
-
8
I
E
4
a)
2
10
15
5
10
15
5
10
15
5
10
Normal
15
5
10
Finger cot
15
5
10
Thimble
15
5
8
F-
2
I0o 4
(I)
c
144
_
I·
_1_1
_1-----11111__
·
Subject:CT Hand:R Trial:3
8
8
4
2
2
5
10
15
5
10
Time (sec)
15
8
8
4
4
5
10
15
5
10
15
5
10
15
5
10
Thimble
15
0
2
2
5
8
10
15
:
5
10
15
8
8
4
4
2
2
--
E
: 4.
22L
z
5
10
5
15
10
15
8
8
4
4
2
2
0
(o
vo
5
10
Normal
15
5
10
Finger cot
145
15
Subject:CT Hand:L Trial:1
8
8
8
24
4
2
2
a)
2
5
10
15
8
CZ~
Ic:
2
5
10
5
10
Time (sec)
15
8
8
4
4
2
2
15
5
10
15
8
8
8
4
4
4
2
2
5
10
15
5
10
15
I
E
a)
:2
5
10
15
5
10
15
5
10
15
5
10
Normal
15
5
10
Finger cot
15
5
10
Thimble
15
8
24
o
2
146
Subject:CT Hand:L Trial:2
8
8
03,
a)
4
o
U_
4
2
5
10
15
5
10
Time (sec)
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
15
5
10
Finger cot
15
5
10
Thimble
15
8
a:-
I
2
I
E
0)
8
4
o
0
2
5
10
Normal
15
147
Subject:CT Hand:L Trial:3
8
8
:4
24
-.... ...
0o
LL
2
2
5
10
15
5
10
Time (sec)
.......
8
.............
15
5
10
15
5
10
15
5
10
15
5
10
Thimble
15
.......
8
cc
0
24
4
2
2
, .. ,0
....
I
5
10
15
. ......
8
..............
8
I
E
=
4
51I
4
5
1_ .....
a)
2
z2
5
10
15
5
10
Normal
15
8
v
0
24
2
5
10
Finger cot
15
148
.
..
.
_..
...........
_~
I
Subject:JK Hand:R Trial:1
8
8
8
'em
:
z
:
:
a,
.)
4
2
2
2
-
R
.
4
:
2
:
'.
5
10
.-
5
10
15
15
5
10
15
5
10
15
....:-..
......
5
10
Time (sec)
.
8
..
.
8
8
4
4
2
2
a:
0
- 4
.
co
10
1
I
2
5
10
15
8
8
4
4
I
E
a)
2
2
5
10
15
8
10
5
15
8
8
4
4
2
2
15
--
4
2)
. /LA·?---x~'
2
5
10
Normal
15
5
10
Finger cot
149
15
5
10
Thimble
15
Subject:JK Hand:R Trial:2
8
8
z
.)_
4
244
2
2
5
...
8 .I ~j/V~""-Y
i·
4
10
.....
15
...
,·
l·/\L/J\i·
rl'
5
10
Time (sec)
5
10
15
5
10
15
15
5
10
15
15
5
10
Thimble
15
15
8
8
4
4
2
2
O2
2
5
10
5
15
10
15
8
I
E
'a
8
I~~~~i,·
4
4
2
5
10
2
15
5
. 1 .-
10
.....................
8 i..
8
.
4
o
0
0)
2
2
5
10
Normal
15
5
10
Finger cot
150
Subject:JK Hand:R Trial:3
...
8
8
8
aZ
a)
4
4
~24
LL
2
2
2
O1
5
10
15
5
10
Time (sec)
15
5
10
15
5
10
15
5
15
5
10
15
5
10
15
CO
0
_0
v
CZ
-r
8
. . .. . . . . . . . . . . . .. .. . . . . .
-Yy
w
-
s-
s
10
8
8
4
4
2
2
I
E
=4
2
.I
I(11.
5
10
15
5
10
15
8
rIv
AI.
V
-
':f
-f .
.
-v
R
C)
C)
n
2
2
5
10
Normal
15
5
10
Finger cot
151
15
5
10
Thimble
15
Subject:JK Hand:L Trial:1
z
0
U-
5
10
8
4
. ....
. .i.·
2
5
10
10
5
Time (sec)
15
15
8
8
4
4
2
2
10
5
15
15
5
10
15
5
10
15
10
15
8
8
I
E
4
-c
2
2
5
0
10
10
15
5
10
5
Finger cot
15
10
5
Thimble
5
15
8
8
4
4
2
2
n
10
5
Normal
15
152
15
Subject:JK Hand:L Trial:2
8
8
a,
O3
4
(.
U-
2
5
10
15
2
5
10
Time (sec)
15
8
8
4
4
2
2
5
10
15
5
10
15
0
5
10
15
10
5
15
...... .............. ......
8
8
8
4
4
4
2
2
I
E
a)
5
10
15
5
10
15
5
10
15
5
10
Normal
15
5
10
Finger cot
15
5
10
Thimble
15
8
co
I-
o
4
0
2
153
Subject:JK Hand:L Trial:3
.. . . .. .
8
. . .... . .
8
a,
r0)
0
o
0
U-
2
4
2
5
10
10
15
5
Time
(sec)
l . .. . . .. . . .. . .
15
.... .. ...................
8
8
8
4
4
2
2
5
10
15
5
10
15
5
10
15
c:
2
I.
5:
0
:
2
-.
.............
15
10
5
..............
...........
8
8
I-
E
4
I~~
~
5
a,
2
.
~ ~~~~~~~~~
4
.
0
1
2
5
10
2
15
.................. I.........
8
8
4
4
2
2
F0
U)
To
cn
5
10
Normal
15
10
5
Finger cot
15
10
5
Thimble
15
154
---
Appendix E
Force Control Performance Measures
The force data digitized at 200 samples per second were filtered with a low-pass filter which
had a cut-off frequency of 50Hz for noise removal before the force error was calculated. Also,
only the data from the second and third stage of each run were analyzed. During the second
stage, the subject had visual force feedback; during the third stage, the visual feedback was
turned off.
The mean absolute error and the pooled standard deviation were tabulated.
The mean absolute error was obtained from 3 experimental runs of 1000 data points during
each stage.
The standard deviation (s) was obtained by pooling the standard deviations
from the three experimental runs (s l , s 2, and S3 ) according to the following formula: s =
I(s12 + S2 2 + S3 2 )/3.
155
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
SN
2N
4N
SN
2N
4N
SN
Rigid
Mean S.D.
0.035 0.028
0.054 0.040
0.093 0.077
0.051 0.046
0.070 0.054
0.165 0.122
0.057 0.045
0.048 0.041
0.128 0.087
Absolute Error (N)
Hard
Medium
Mean S.D. Mean S.D.
0.063 0.046 0.030 0.028
0.030 0.023 0.056 0.043
0.061 0.047 0.128 0.106
0.037 0.031 0.032 0.028
0.035 0.027 0.049 0.037
0.100 0.089 0.108 0.093
0.057 0.042 0.030 0.024
0.032 0.026 0.060 0.052
0.098 0.059 0.066 0.053
Soft
Mean
S.D.
0.036 0.031
0.067 0.051
0.073 0.064
0.035 0.035
0.057 0.037
0.160 0.129
0.041 0.034
0.042 0.030
0.110 0.077
Table E.i: Absolute error in force control for subject CH using right hand index finger with
visual feedback.
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
SN
2N
4N
8N
2N
4N
8N
Rigid
Mean
S.D.
0.162 0.094
0.093 0.050
0.586 0.301
0.148 0.144
0.171 0.098
0.519 0.341
0.121 0.053
0.105 0.054
0.533 0.274
Absolute Error (N)
Hard
Medium
Mean S.D. Mean S.D.
0.191 0.090 0.150 0.101
0.261 0.133 0.107 0.059
0.210 0.218 0.331 0.182
0.182 0.096 0.111 0.083
0.107 0.067 0.062 0.038
0.314 0.267 0.400 0.247
0.266 0.120 0.082 0.051
0.090 0.041 0.195 0.121
0.520 0.264 0.506 0.336
Soft
Mean
S.D.
0.123 0.069
0.135 0.109
0.164 0.132
0.157 0.119
0.098 0.072
0.594 0.265
0.214 0.091
0.104 0.095
0.415 0.321
Table E.2: Absolute error in force control for subject CH using right hand index finger without
visual feedback.
156
II
I-
-·ll^·IVllili--··-l111··01-..-.
·--XIU-__^1I-·--·--LII--------·--
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
SN
2N
4N
8N
2N
4N
SN
Rigid
Mean
S.D.
0.037 0.026
0.054 0.045
0.125 0.104
0.048 0.039
0.062 0.058
0.136 0.095
0.040 0.041
0.074 0.052
0.110 0.080
Absolute Error (N)
Hard
Medium
Mean S.D. Mean S.D.
0.033 0.026 0.035 0.025
0.048 0.044 0.047 0.039
0.086 0.079 0.106 0.083
0.043 0.039 0.033 0.030
0.065 0.040 0.056 0.043
0.069 0.058 0.100 0.113
0.029 0.025 0.041 0.034
0.037 0.035 0.065 0.044
0.076 0.057 0.068 0.052
Soft
Mean S.D.
0.038 0.031
0.069 0.077
0.107 0.117
0.041 0.033
0.071 0.075
0.081 0.069
0.048 0.027
0.071 0.047
0.108 0.090
Table E.3: Absolute error in force control for su bject CH using left hand index finger with
visual feedback.
I Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
8N
2N
4N
8N
Rigid
Mean S.D.
0.188 0.076
0.252 0.144
0.218 0.174
0.324 0.160
0.204 0.102
0.314 0.172
0.182 0.117
0.280 0.124
0.180 0.121
Absolute Error (N)
Hard
Medium
Mean S.D. Mean S.D.
0.138 0.056 0.175 0.068
0.069 0.060 0.091 0.056
0.178 0.155 0.237 0.193
0.113 0.052 0.154 0.086
0.263 0.119 0.176 0.074
0.329 0.286 0.335 0.262
0.051 0.044 0.167 0.113
0.092 0.057 0.375 0.193
0.168 0.132 0.227 0.130
Soft
Mean
S.D.
0.168 0.083
0.111 0.073
0.129 0.101
0.210 0.135
0.345 0.162
0.256 0.150
0.316 0.158
0.326 0.103
0.351 0.171
Table E.4: Absolute error in force control for subject CH using left hand index finger without
visual feedback.
157
II-·--LII_IPIIII_1--LI__
__ I---
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
SN
2N
4N
SN
Rigid
Mean S.D.
0.034 0.043
0.066 0.048
0.147 0.102
0.025 0.031
0.071 0.053
0.188 0.114
0.041 0.032
0.074 0.065
0.142 0.104
Absolute Error (N)
Hard
Medium
S.D.
Mean
S.D. Mean
0.066 0.043 0.043 0.028
0.080 0.060 0.079 0.058
0.078 0.063 0.098 0.062
0.036 0.032 0.030 0.019
0.171 0.149 0.065 0.045
0.099 0.051 0.172 0.114
0.027 0.019 0.028 0.024
0.082 0.072 0.048 0.033
0.139 0.152 0.136 0.093
Soft
Mean
S.D.
0.021 0.016
0.063 0.037
0.171 0.098
0.024 0.021
0.051 0.039
0.122 0.073
0.025 0.016
0.042 0.024
0.137 0.080
Table E.5: Absolute error in force control for subject CT using right hand index finger with
visual feedback.
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
8N
2N
4N
8N
Rigid
Mean S.D.
0.157 0.103
0.565 0.275
1.400 0.849
0.130 0.075
0.646 0.338
1.303 0.560
0.101 0.058
0.156 0.110
1.137 0.568
Absolute Error (N)
Medium
Hard
Mean S.D. Mean S.D.
0.179 0.105 0.079 0.073
0.308 0.140 0.311 0.160
0.931 0.436 0.609 0.371
0.082 0.058 0.098 0.068
0.507 0.207 0.568 0.304
0.833 0.441 0.957 0.520
0.100 0.054 0.060 0.038
0.541 0.240 0.221 0.135
0.742 0.360 1.156 0.660
Soft
Mean
S.D.
0.184 0.139
0.509 0.263
0.875 0.461
0.202 0.113
0.437 0.224
0.642 0.331
0.127 0.083
0.532 0.335
0.833 0.406
Table E.6: Absolute error in force control for subject CT using right hand index finger without
visual feedback.
158
'~-'
.-
~
1~-
~
-1~~''-I_
~.
...
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
8N
2N
4N
SN
Rigid
Mlean S.D.
0.029 0.020
0.051 0.042
0.132 0.080
0.045 0.051
0.048 0.036
0.154 0.083
0.044 0.046
0.069 0.058
0.162 0.094
Absolute Error (N)
Medium
Hard
Mean S.D. Mean S.D.
0.032 0.030 0.035 0.023
0.066 0.057 0.045 0.034
0.133 0.083 0.106 0.077
0.034 0.034 0.053 0.076
0.065 0.039 0.063 0.054
0.114 0.087 0.105 0.071
0.038 0.034 0.042 0.040
0.056 0.043 0.048 0.029
0.132 0.081 0.117 0.073
Soft
Mean
S.D.
0.040 0.044
0.054 0.034
0.145 0.086
0.036 0.038
0.057 0.053
0.113 0.075
0.034 0.033
0.053 0.041
0.105 0.063
Table E.7: Absolute error in force control for subject CT using left hand index finger with
visua.l feedback.
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
8N
2N
4N
SN
Rigid
Mean S.D.
0.055 0.046
0.206 0.126
0.821 0.375
0.104 0.040
0.149 0.102
0.902 0.565
0.051 0.031
0.166 0.103
0.998 0.531
Absolute Error (N)
Medium
Hard
Mean S.D. Mean S.D.
0.053 0.033 0.087 0.062
0.283 0.127 0.267 0.157
0.537 0.283 0.830 0.432
0.036 0.023 0.073 0.047
0.155 0.139 0.207 0.141
1.111 0.562 0.896 0.530
0.063 0.031 0.096 0.080
0.262 0.176 0.158 0.095
0.878 0.519 0.872 0.557
Soft
Mean S.D.
0.074 0.044
0.320 0.160
1.011 0.598
0.057 0.033
0.207 0.144
0.682 0.380
0.033 0.024
0.193 0.137
0.607 0.407
Table E.8: Absolute error in force control for subject CT using left hand index finger without
visual feedback.
159
-
I-
-------
-
----
--·--------------
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
SN
2N
4N
SN
2N
4N
8N
Rigid
Mean
S.D.
0.033 0.029
0.067 0.046
0.140 0.114
0.040 0.034
0.059 0.048
0.154 0.130
0.046 0.044
0.056 0.046
0.097 0.081
Absolute Error (N)
Hard
Medium
Mean S.D. Mean S.D.
0.024 0.019 0.037 0.028
0.049 0.038 0.063 0.050
0.114 0.090 0.151 0.108
0.027 0.022 0.046 0.037
0.045 0.036 0.068 0.063
0.121 0.099 0.125 0.089
0.039 0.026 0.051 0.034
0.039 0.032 0.061 0.048
0.094 0.073 0.116 0.088
Soft
Mean
S.D.
0.029 0.023
0.058 0.048
0.134 0.103
0.034 0.030
0.066 0.054
0.139 0.104
0.048 0.047
0.066 0.049
0.103 0.080
Table E.9: Absolute error in force control for su bject JIK using right hand index finger with
visual feedback.
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
8N
2N
4N
8N
Absolute Error (N)
Rigid
I
Hard
Medium
Soft
Mean S.D. Mean S.D. Mean S.D. Mean S.D.
0.114 0.074 0.087 0.080 0.084 0.054 '0.065 0.034
0.230 0.173 0.221 0.176 0.124 0.087 0.123 0.085
0.344 0.254 0.311 0.212 0.217 0.148 0.475 0.260
0.072 0.048 0.173 0.160 0.098 0.070 0.117 0.098
0.109 0.081 0.125 0.087 0.186 0.144 0.204 0.132
0.513 0.292 0.330 0.187 0.289 0.177 0.306 0.184
0.151 0.104 0.078 0.046 0.128 0.068 0.125 0.121
0.158 0.106 0.105 0.067 0.156 0.117 0.094 0.062
0.299 0.207 0.291 0.149 0.213 0.156 0.455 0.368
Table E.10: Absolute error in force control for subject JK using right hand index finger
without visual feedback.
160
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
SN
2N
4N
SN
2N
4N
8N
Absolute Error (N)
Hard
Medium
Mean S.D. Mean S.D.
0.036 0.030 0.042 0.034
0.054 0.043 0.089 0.090
0.174 0.158 0.166 0.144
0.044 0.036 0.049 0.033
0.069 0.060 0.067 0.052
0.159 0.131 0.141 0.131
0.046 0.040 0.060 0.039
0.064 0.048 0.061 0.043
0.149 0.126 0.115 0.097
Rigid
Mean S.D.
0.044 0.037
0.075 0.070
0.170 0.121
0.047 0.038
0.071 0.056
0.140 0.118
0.065 0.050
0.082 0.050
0.116 0.098
Soft
,Mean S.D.
0.059 0.051
0.084 0.067
0.195 0.152
0.059 0.042
0.083 0.064
0.149 0.118
0.044 0.033
0.071 0.054
0.150 0.125
Table E.11: Absolute error in force control for subject JIK using left hand index finger with
visual feedback.
Condition
Normal
Normal
Normal
Finger cot
Finger cot
Finger cot
Thimble
Thimble
Thimble
Force
2N
4N
8N
2N
4N
8N
2N
4N
8N
Rigid
Mean S.D.
0.101 0.084
0.240 0.155
0.839 0.506
0.145 0.097
0.266 0.187
1-.016 0.536
0.195 0.100
0.227 0.141
0.416 0.331
[
Absolute Error (N)
Medium
Hard
Mean. S.D.. Mean S.D.
0.088 0.072 0.139 0.114
0.174 0.171 0.206 0.146
0.828 0.511 0.575 0.352
0.138 0.104 0.085 0.059
0.307 0.229 0.208 0.159
0.585 0.341 0.648 0.399
0.198 0.145 0.130 0.072
0.132 0.080 0.156 0.125
0.489 0.393 0.777 0.533
Soft
Mean S.D.
0.199 0.165
0.389 0.255
0.972 0.617
0.169 0.110
0.291 0.225
1.041 0.613
0.071 0.048
0.258 0.248
1.009 0.523
Table E.12: Absolute error in force control for subject JK using left hand index finger without
visual feedback.
161
-'1'~~11"-~`~---
1-----
--
'I
Appendix F
Statistical Tests on Force Control
Performance Measures
The analysis of variance (ANOVA) method was used to find out whether the force control
performance was influenced by factors such as target force magnitude, finger contact conditions, and specimens. The performance data from Appendix E were used for all the tests
performed. All the statistical analyses were performed by using MATLAB statistics toolbox.
F.1
Specimen softness and finger contact conditions
The effects of both specimen softness and finger contact conditions were examined together
by using two-way ANOVA. The data from the three subjects for the two visual force feedback
conditions and two hands were analyzed separately (a total of 12 combinations). In other
words, the data for the three target force magnitudes were grouped together in this analysis.
Visual observations of the subjects' performance indicated that they seemed to have higher
error at high target force magnitude. To minimize the effect of target force in the analysis,
the performance data was expressed in terms of percentage of the target.
The results of the analysis could not reject the hypothesis that there was no effects of
specimen softness and of the contact conditions in all but one circumstances (1 out of 12 tests).
In that only circumstance, the ANOVA resulted in rejecting the hypothesis of no specimen
effect for subject JK under visual force feedback. Based on results of the majority of the
conditions tested, the likelihood that the specimen softness and the finger contact conditions
played important roles in the force control tasks was small. Therefore, the following analysis
162
____.II
L_III_ _^
I·_II__
T__
_
__
used data, pooled from the different specimen softnesses as well as various contact interface
conditions.
F.2
Target force magnitude
One-way ANOVA tables were constructed to compare target force magnitude factor. The
columns stands for the data collected at three target force levels under various specimens
and contact interface conditions. The reason for pooling data. from those two factors is to
increase the reliability of the analysis. Table F.1 and Table F.2 list the data pooled for the
two visual force feedback conditions. The resulting ANOVA tables are shown in Tables F.3
and Table F.4. The hypothesis tested here is that target force magnitude did not significantly
affect the results in either conditions. Taking the F ratios obtained from the two ANOVA
tables (32.06 and 36.59) and conlparing them to the F distribution with the same degree of
freedoms (2,33), both hypotheses were rejected at 1 % significance level. The target force
magnitude was found to be a. significant factor that affected control performance. However,
when only comparing data. from 2N and 4N target force, the hypothesis could not be rejected
under both visual force feedback conditions. Thus, the main differences came from the 8N
target force runs for subject CH.
The corresponding box plots which show the spread of the data for the two tables.are
shown in Figure F-1 and Figure F-2. The box has lines at the lower quartile, median, and
upper quartile values. The whiskers are lines extending from each end of the box to show the
extent of the rest of the data if they were less than 1.5 times the interquartile ranges (IQR).
Otherwise, whiskers end at the most extreme observations, still lie within 1.5 times IQR of
the quartiles and the remaining observations were plotted as outliers.
For subjects CT and JK, there were also significant differences between 2N, 4N, and
8N target force magnitudes. In addition, the differences between 2N and 4N target force
magnitudes were big enough to reject the hypothesis that their performance were the same
at 1% significance level with and without visual force feedback. The box plots for the two
subjects under those two conditions are shown in Figure F-3, Figure F-4, and Figure F-5,
Figure F-6, respectively.
On the other hand, comparison can be made after the absolute errors were divided by the
target force magnitudes and the performance is measured in terms of the percentage error.
163
Specimen
Rigid
Rigid
Rigid
Hard
Hard
Hard
Medium
Medium
Medium
Soft
Soft
Soft
Finger
Condition
Normal
Finger cot
Thimble
Normal
Finger cot
Thimble
Normal
Finger cot
Thimble
Normal
Finger cot
Thimble
Mean Absolute Error (N)
Target: 2N Target: 4N Target: 8N
0.035
0.054
0.093
0.051
0.070
0.165
0.057
0.048
0.128
0.063
0.030
0.061
0.037
0.035
0.100
0.057
0.032
0.098
0.030
0.056
0.128
0.032
0.049
0.108
0.030
0.060
0.066
0.036
0.067
0.073
0.035
0.057
0.160
0.041
0.042
0.110
Table F.1: Data used for computing a one-way ANOVA table to determine the significance
of target force magnitude for subject CHI with visual feedback when using the right hland.
For both subjects CIH and JK, the percentage errors were significantly lower when controlling
4N and SN target force than when controlling 2N target force with visual force feedback (see
Figure F-7 and Figure F-9). For subject CT, the percentage errors were not significantly
different under the three different target force levels with visual feedback (see Figure F-8).
The comparisons for the performance achieved at different target force magnitude without
visual feedback were conducted in a similar fashion. The results are shown in Figure F-10,
Figure F-11, and Figure F-12.
The qualitative effect of target force magnitude as observed from the box plots can be
summarized as follows: When the mean absolute error is used as the performance index,
higher target force generally increases both the mean absolute error and the standard deviation
of the absolute error. However, for subject CH, the performance at 2N and 4N with or without
visual feedback were about the'same. When the mean absolute error expressed in percentage
is used as the performance index, higher target force did not increase the error in general,
except for subject CT without visual force feedback.
F.3
Visual feedback
One-way ANOVA tables were constructed using the performance data, expressed in percentage of target force, collected from each subject, to compare the effect of visual feedback
164
Specimen
Rigid
Rigid
Rigid
Hard
Hard
Hard
Medium
Medium
Medium
Soft
Soft
Soft
Finger
Condition
Normal
Finger cot
Thimble
Normal
Finger cot
Thimble
Normal
Finger cot
Thimble
Normal
Finger cot
Thimble
Mean Absolute Error (N)
Target: 2N Target: 4N Target: 8N
0.162
0.093
0.586
0.148
0.171
0.519
0.121
0.105
0.533
0.191
0.261
0.210
0.182
0.107
0.314
0.266
0.090
0.520
0.150
0.107
0.331
0.111
0.062
0.400
0.082
0.195
0.506
0.123
0.135
0.164
0.157
0.098
0.594
0.214
0.104
0.415
Table F.2: Data used for computing one-way ANONVA table to determine the significance of
target force magnitude for subject CH without visual feedback when using the right hand.
ANOVA Table
Source
SS
df
MS
F
32.06
Columns
0.03064
2
0.01532
Error
0.01577
33
0.0004778
Total
0.04641
35
Table F.3: ANOVA table to determine the significance of target force magnitude for subject
CII with visual feedback when using right hand. The columns represent the data'obtained
from three target forces under various finger and specimen conditions.
ANOVA Table
Source
SS
df
MS
Columns
0.6386
2
0.3193
Error
0.288
33
0.008727
Total
0.9266
35
F
36.59
Table F.4: ANOVA table to determine the significance of target force magnitude for subject
CH without visual feedback when using right hand. The columns represent the data obtained
from three target forces under various finger and specimen conditions.
165
Subject CH with Visual Feedback
0.16
0.14
-0.12
* 0.1
.0
C
. 0.08
I
0.06
I
I
II~~~~~~~~~~~~~~~~~~~~~~~~~
I
I
I
0.04
2N
4N
Target Force
8N
Figure F-1: Box plot of data pooled from various finger and specimen conditions for subject
CH with visual feedback when using the right hand.
Subject CH without Visual Feedback
0.6
-I
0.5
o
ii
.01
< 0.3
c
a)
+I
2
0.2
I~~~~~~~~~~~~~~~~~~
I
I
0.1
2N
4N
Target Force
8N
Figure F-2: Box plot of data pooled from various finger and specimen conditions for subject
CH without visual feedback when using the right hand.
166
Subject CT with Visual Feedback
LU
Ui
.0
C:
a,
2N
4N
Target Force
8N
Figure F-3: Box plot of data pooled from various finger and specimen conditions for subject
CT with visual feedback when using the right hand.
Subject CT without Visual Feedback
1.4
1.2
-
He~ i
1
z
I
= 0.8
.0
<a0.6
2
0.4
0.2
v
n
I
2N
~~~1~~~~~~~~
I
4N
Target Force
I
·
8N
Figure F-4: Box plot of data pooled from various finger and specimen conditions for subject
CT without visual feedback when using the right hand.
167
Subject JK with Visual Feedback
-~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
0.16
0.14
I
0.12
z
I
2 0.1
1
LI0
.0
c 0.08
a)
I~~~~~~~~~~~~~~~~~~~~~~~
0.06
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~I
0.04
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
1
0.02
,
I-~~~~~~~~~~~~~~~~~
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
4N
Target Force
2N
.I
8N
Figure F-5: Box plot of data pooled from various finger and specimen conditions for subject
JIK with visual feedback when using the right hand.
Subject JK without Visual Feedback
I
I1
0.5
0.45
0.4
Z0.35
0.3
C.
c 0.25
a)
Mr
0.2
,
~~~~~~~11
0.15
0.1
|~~~~~~~~
Ir
l
0.05
2N
l
|
4N
Target Force
I
l~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
8N
Figure F-6: Box plot of data pooled from various finger and specimen conditions for subject
JI without visual feedback when using the right hand.
168
Subject CH with Visual Feedback
3
2.5
o
u
2
.Q
C
1I
I
I
I
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
ca
a,
I
1.5
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
I~~~~~~~~~~~~~~~~~~~~
1
i~~~
iI
2N
4N
Target Force
8N
Figure F-7: Box plot of data, expressed in percentage, pooled from various finger and specimen conditions for subject CH with visual feedback when using the right hand.
Subject CT with Visual Feedback
I~~+
I,~
4
3.5
3
~~+
~~~~
I
Uv
q 2.5
c
a,
2
1.5
I
I
l
l
2N
4N
Target Force
I
l~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
8N
Figure F-8: Box plot of data, expressed in percentage, pooled from various finger and specimen conditions for subject CT with visual feedback when using the right hand.
169
Subject JK with Visual Feedback
2.6
2.4
2.2
2
u 1.8
c'
co
a, 1.6
2
1.4
l
I
I
1
I
I~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~I
1.2
Il
1
g
1~~~~~~~~~~~~~~~
1
2N
4N
Target Force
8N
Figure F-9: Box plot of data, expressed in percentage, pooled from various finger and specimen conditions for subject JIK with visual feedback when using the right hand.
Subject CH without Visual Feedback
I
12
10
0
w 8
II
I
ci,
.70
C
a)
Wa
a, 6
I
4
I
X
II,
I
I
I
2
2N
4N
Target Force
8N
Figure F-10: Box plot of data, expressed in percentage, pooled from various finger and
specimen conditions for subject CH without visual feedback when using the right hand.
170
Subject CT without Visual Feedback
18
16
14
I
I
.~o
a
6- 12
-0 i O
C
/\I
CU
2
8
6
:,
4
2N
4N
Target Force
8N
Figure F-11: Box plot of data, expressed in percentage, pooled from various finger and
specimen conditions for subject CT without visual feedback when using the right hand.
Subject JK without Visual Feedback
8
I
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~I
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~I
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~I
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~I
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~I
I
7
t°6
I
c 5
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ I
.~~~~~~~~~~~~~~
I
i
a)
4
I/
3
,I.
I
iI
2N
4N
Target Force
.
8N
Figure F-12: Box plot of data, expressed in percentage, pooled from various finger and
specimen conditions for subject JK without visual feedback when using the right hand.
171
1_1_11-1
_
Subject CH with Right Hand
12
10
2
8
I
u;
I
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
ca,
6
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
I
4
+
+
I
2
Yes
No
Visual Feedback Availability
Figure F-13: Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CH when using the right hand.
by pooling data from various finger conditions, target forces, and specimen softnesses. The
columns stand for the data collected with different force feedback conditions. The hypothesis
tested here is that the presence or absence of feedback did not significantly affect the results.
The ANOVA results rejected the hypothesis for all three subjects with very high F ratios
at 1% significance level. Therefore, there is a significant difference between whether or not
visual force feedback was available. Figure F-13, Figure F-14, and Figure F-15 show the box
plots for the right hand of the three subjects.
F.4
Hand used
One-way ANOVA tables were constructed using the performance data, expressed in percentage of target force, collected from each subject to compare the effect of visual feedback by
pooling data from various finger conditions, target forces, and specimen softness with visual
feedback. The columns stand for the data collected with different hands. The hypothesis
tested here is that the two hands did not significantly affect the results. The resulting ANOVA tables which reject the hypothesis at 1% significance level are listed in Tables F.5, F.6,
172
.,~~~~~~~
.
.
..
Subject CT with Right Hand
18
16
14
g 12
12
Q
c 8
6
+
+
I
2
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~I
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
+
Yes
No
Visual Feedback Availability
Figure F-14: Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CT when using the right hand.
Subject JK with Right Hand
9
8
7
-
c4
Ir~~
~
3
2
1
.
F
II
I ~t
~
X
I
1~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
I
lI
Yes
No
Visual Feedback Availability
Figure F-15: Box plot of data., expressed in percentage, pooled from various interface, force,
and specimen conditions for subject JIK when using the right hand.
173
I-___1_--_II-
CI
ANOVA Table
Source
SS
df
MS
F
Columns
199.9
1
199.9
14.3
Error
978.6
70
13.98
Total
1179
71
Table F.5: ANOVA table to determine the significance of the hand used for subject CT
without visual feedback. The columns represent data,, in percentage, obtained from various
target forces under various finger and specimen conditions.
ANOVA Table
Source
SS
df
MS
F
Columns
3.369
1
3.369
20.17
Error
11.69
70
0.167
Total
15.06
71
Table F.6: ANOVA table to determine the significance of the hand used for subject JI with
visual feedback. The columns represent data, in percentage, obtained from various target
forces under various finger and specimen conditions.
and F.7. The tables correspond to the data of subject CT without visual feedback and
subject JI with and without visual feedback.
Therefore, there was a significant difference between the performance of the two hands
of subject J
in force control with and without visual feedback. For subject CT, there was
a difference when the visual feedback was not available. As far as subject CH is concerned,
the performance was not significantly different for the two hands. Figure F-16 to Figure F21 show the box plots for the three subjects using different hands with and without visual
feedback.
174
-IIIIIIIIIL--l
--- I-._--lll--·--*CI11---^r_111·.^---
II-·1I 1-
1111
-
ANOVA Table
Source
SS
df
MS
F
Columns
162.5
1
162.5
33.77
Error
336.9
70
4.813
Total
499.4
71
Table F.7: ANONVA table to determine the significance of the hand used for subject JIK
without visual feedback. Tile columns represent data, in percentage, obta.ined from various
target forces under various finger and specimen conditions.
r
Subject CH with Visual Feedback
1
I
3
2.5
I
LU
Jo
0
w
I
+
2
C
(0)
2
1.5
1
-
1I
1
t
Left
Right
Hand Used
Figure F-16: Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CH when using the right hand.
175
_i__i_______l__l__ll11____1_1_
1·----__1_(.-·_----11·-^11__-1·11--·--_1
1_^-_XI^I*l I-.
I
I
Subject CH without Visual Feedback
-
16
I
I
I
14
I
I
I
12
,I
I
II
II
I
I
10
<
I
I
I
I
I
I
8
c
a)
6
4
2
Left
Right
Hand Used
Figure F-17: Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CH when using the left hand.
Subject CT with Visual Feedback
I
I
4
3.5
-
3
, 2.5
Ca)
I
2
I
I+~~~~~~+
1.5
-
1
I
1
'Ik
Left
Right
Hand Used
Figure F-18: Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CT when using the right hand.
176
__I
_I
C__1__ ·II-·I^------1----I
--
-------
·
ltC1·
1~··
1·--
~
-
-
Subject CT without Visual Feedback
I
18
16
I
14
r-
12
II
-0
W 10
I
I
l
M 8
a)
I
II
I
6
4
2
I
I
Left
Right
Hand Used
Figure F-19: Box plot of data., expressed in percentage, pooled from various interface, force,
and specimen conditions for subject CT when using the left hand.
1
Subject JK with Visual Feedback
·
+
3
-2.5
I
I
o
I
IJ
1
<
X+~~~~~~~~~~~~~~~~~~~~~~~~
I
2
I
c)
a,
I
1.5
I
I
I
I~~~~~~~~~~~~~~~~~~~~~~~~~~
1
Left
Right
Hand Used
Figure F-20: Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject JK when using the right hand.
177
______IIIII1_1LIY__----_·-
YI·IIII^I_-X··_II-Y^-l
-_ 11
1_-111 -- -
Subject JK without Visual Feedback
12
10
8
o
C,,
a
C
Q)
I
6
I
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~,,
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
I
I
4
I
2
_
__
1
Left
·
Right
Hand Used
Figure F-21: Box plot of data, expressed in percentage, pooled from various interface, force,
and specimen conditions for subject J when using the right hand.
178
------
_II
I___C-·L- ~
II_ 1 I-
-
Appendix G
Contact Visualization Analysis
Presented in this appendix are the data analyzed during the contact visualization experiments
under various conditions. For the low magnification experiments on overall contact regions,
the results are plotted in two ways. In the first figure, the various pieces of contact information
are plotted against time; in the second, the same information is plotted against force. The
video a.nd force data. were collected a.t a. rate of 20 and 1000 samples per seconds, respectively.
In the figures, the mean force during each frame was used as the force magnitude.
179
XI__I-l
·._YI.IIICI-IIPI·--^--1-1-·1·_1_
- -I I 111_l^11*l1111
-- ---
Subject:ch Specimen:rig Trial:l
2.5
x
1.5
a)
:
x
o
0
20
.
..
x
15
-- -x
x
C
o
1
Ox.
........
03
:
0.5
::
X
X0
0.5
0
1
c)
1.5
a)
C
-O.5
Time0.5
Time (sec)
10 .....-
. .. ...
5
0
1.5sec)
0.5
1
Time (sec)
1.5
2
rnA.
20C
,,)v
.
I
E 15C
X
....
.
-40
: ..........
..
.
x
E
.~o
.
-
x
xO:
P 10C
co
..........
E
o 5c
X'
.X
........
x
x
a)
(l
0
. : .........
.......
...
xx
10
..
x:
........ x ,a!X................
....
....... ..........
X
X
0
0.5
1
1.5
Time (sec)
I
0.5
1
Time (sec)
1.5
2
A
0.014
< 0.012
E
0.01
xX
:(
....
n
Oo'
x
< 20
z
0
',.
E
E 30
I·
I
2I
A
U.Ub
< 0.05 .-- .
E
i xXX io'.. ...............
. ........
a
, 0.008
0
) 0.006
:
0
.
..
..
.............
....................
n 0.02
... . 0
..........
0 0.01
...............................
.......... ....... ...
Oo:
z
0
aD
........
0.03
c-0.004
o 0.002
:0
U)
a-
E
.....
......
z 0.04
0
/)
,.
x
0.5
1
Time (sec)
1.5
0
C
o
2
0.5
1
Time (sec)
.. . . .
.
Ooi
1.5
2
Figure G-1: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CH, Trial:1).
180
-----------
------ ·---
·-·--
'------
------
----
I-
"
Subject:ch Specimen:rig Trial:1
2.
25
0
2.5
2
,,
a,
:X
;X
0.
C.)
.................
O
00.5
. 1
C,
Time
Time (sec)
.r
O
00i
< 150
E
E
X
x
X
o
oX
X X· X
-X
. .. ... ...:X. .. x... ...... .. ... .. .. .. ..
1(
x
0 -- X
5
0 0°'x
0.5
x
C)
)1
<4r12
.
x
z
...
2.!
0O
2' x
X
.
.......
0O
..
. ... .........
.......
:
0
n
.....
X
O3
X
CIJ
0
2
0
:.
.......
1
1.5
ox
Force (N)
x
-4
cuj ..
0
E
E 3 )2
(,
........
:
:
x0
a 100 I
E 50
X!
X
5
o
X
x.
x
1
2(sec)
2
1.5
20CI
o
.
x0.......
o0
c
1.5
0
Q.
0.5
.
o
0)
C
0
.
o
0
X
o
U-
5
.o
2
....
.,
x..
1O.
...........
0
X
..........
,,
:
>/bQ......
o0
o o
X
0.5
1
1.5
Force (N)
0
0
2.5
2
0.014
0.5
1
1.5
Force (N)
2
2..
0.0
4~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
...
< 0.01o
E
E 0.01
8
0.00
.....
.....
0o.o
5 ...... x--' x-"x ...
x~
- x ··· ··
1. - - -- - ~- ~ ..x
·x· -·~~~~~~~~X..
· · · ·· ··
xc
:- - --·x ·.....
............
..............
X
X o :O
E
E
z 0.0
X
,
.X X
.
X
0 .......
O
0
a 0.0
3o.o
(,
cao
/)
2 0.00(
2BOX
"o0.004 4
E
o 0.00
°
z
0
0.0
'So: X 0:
........
.....
:
..........
- 0.0
:
. -x-xi
. ... ... .... ... .... .. ...... ... ... .
O:
_ 0.0
o
0
0
0
0.5
1
1.5
Force (N)
2
q,
2.5
0
0.5
1
1.5
Force (N)
2
2.5
Figure G-2: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CH, Trial:1).
181
----------- ------·------
·-------------
-
---------------
---------------------
----
----
-
--·-
Subject:ch Specimen:rig Trial:2
2
, ... :. .. ......
1.5
2E
0
®0
.X
X
X
.....
O0
...
24
X
1
z
LL
XX
......
0.5
xX
0
.. ..
0
-0.5
0
... . . .
a
X
18
16
0
0.5
1
Time (sec)
1.5
14
0
2
200
0.5
E
E
E 3C
X
X
Xo
X
· 100
2
X
X
x
......
X
...........
1.5
2
X,,
Ca
X
xX
< 2C
...........
10
<
X
xX
X
X
X
C
X
0
0.5
1
Time (sec)
1.5
C
0
2
0.012
0.5
1
Time (sec)
0.05
< 0.01
E 0.04
E
E
z 0.008
z
a)
.. 0.03
0
O
X X
...................
................
(O0.006
a)
L
1.5
-40
E
0
1
Time (sec)
50
< 150
C
E
o 50
z
.
X
X
X
X
22
a)
2C
X
X
a)
;CP
) 0.02
a.
0.004
O
io
E 0.002
O
.. . ...... . .
t30.01
. 0 . .. .. ... ..
0
z
0
D
0.5
1
Time (sec)
1.5
0
2
0
0.5
1
Time (sec)
1.5
2
Figure G-3: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CH, Trial:2).
182
"--1-l1
11'1
--11--'-`"11111
111
^ -.- I
--
-_I_-I--
--- XI-l-.-
---
-I
Subject:ch Specimen:rig Trial:2
2
28
xo
.....
. ..
1.5
C
0
02
C)
a)
'o...
- I
1
Time (sec)
1.5
x...
(D1~
2
a)
l(3~
Xl......;.
.......:.. .......
O11 6..xxX
6~~~~
... ...
11
X~~~~
Force
(N)
0 0~~~ O
X.-<)<
4
X .. ... ..x
2
Ix~x
1.5
0
0.5
x
Forcex(N)
........
0~
0
0.5
2.
~0~~~
-2(
0
...... . x.......
...--. i.
0
6 ..... ··...
O2
(Vr
x .... .. .. . . . ...
~~~~~~. x...~¢...
0.5
0.~~~~
52
0
0
U-
0
6 :
'
x
x
x
/
1
a)
0
4
2
x
200
5
x~~~
0 ~~~~~0
O..... ...oo.
'
0
o..
< 150
E
0
E
- 100
0
0 50
z
-·
x
I
(1
.
.
.
.
.
x
.... . . .
<.1 100
X
x
1.5...........
0. .. ... .. ... . .. .. ... ...
.. ... .. ... ..
. ... X ...
x
x
0
0.5
1
2
1.5
0.5
0
1
Force (N)
a)
c
.x
Z
0.004
xXX
4 .-
... ... .. ......
:. .. . .....
. . .X
~
~.x.............. C ..........
'?'0.0
xx..x.. .. ..............
.. .X
.. . x
x
. . . . . . . . . . . . . . . . . . . . . ..........
a)!coo
0.0
0
.
0
Q_
0.
C
E 0.002
Z
E
. . ... ... . . ... ... .. ....X . ... ..!. ... ... ...
'X '
4..
< 0.0
X
X '0
co 0.006
1.5
0.0
0.01
=3
0
Force (N)
0.012
E
0.008
X
x
a)
X
11
I
0
X
X
< 20
x xx
.
X:
.. .
E
. .. o
..
~~x
0
E
X
x·
x
·
C
-4
CM
X °.xO00
0
0
0
0
: 0.0 2 . .. ... ..
0
0.5
1
Force (N)
1.5
2
0
o
. ... .. .. ....... . .. ... ...... .. ..
0.5
1
Force (N)
1.5
2
Figure G-4: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CH, Trial:2).
183
Subject:ch Specimen:rig Trial:3
2.5
f' F
-
o
x
Z 1.55
a,
C)
_30
0
x
o
X:
L
X
1
a)
c
0.
X
0.5
X
a)
xX
1
0.5X
CL
0a
0_
1.C
:
X
....X..- .
2 20
0
0
x
25
x
,
........
:
...
1
XX
-
0
1
0.5
1.5
2
0.5
C
)
Time (sec)
20C
60
E
E
)10
'
.0 . ..............
0
E 40
E
0
... X..
....
............
. ... ... ..
2
0
x
CJ
1.5
.
.
50
.
X
15C
1
Time (sec)
- --
:
.
........
..
..
30
X
c
= 20
z 50
Z
10 ..........
................................
X...........
..
C
0
0.5
1
Time (sec)
1.5
0
2I
X
·
0.5
)
1
Time (sec)
1.5
n nq -
n n1
V.,,
:x ............
cq
< 0.01
E 0.04
-o0.008
Z
z
...
8 0.03
i 0.006 · ·
a)
Q 0.004
·
...x... ........
· ·....
...
.. .. .. .... ... ... ......
................
. ........
.C
.............
o 0.002
z
u)
ao
1
Time (sec)
...
....
0
4:
AI
0.5
..
. .. ... .. .. ..
0.01 ........... .............
o
:0 .........
n
0
.
.. ... .. ... .. ..
0.02
.....
.
...
1.5
2
-
0
0
I
0.5
.
1
Time (sec)
I
1.5
2
Figure G-5: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CH, Trial:3).
184
Subject:ch Specimen:rig Trial:3
2.
35
.
.
s
.
o
_ 30 o%I,, O
X
.5
...
:......
x
X
a)
-
0
x
.
X0
x
x
o 25
X
5
.. X o
C
o
O
a)
0..
0.
(1
xX
o
0
0
1
-x -
10
0
0)
X
20
o
X X
0
0.5
1
Time (sec)
1.5
Iz
2
20(I^J
0
0.5
1
1.5
Force (N)
2
2. 5
nr
0
0
0
0
.0 . ..........
0
' 15(
E
E
0
0
0
...
. 0
XX:
X
x
X
50
E 40
O X
C\ (
< 10c
.
co
_
O
o .......0
o
X
:.-x
.....
,, ....
E
. .. .. . . . .. . .. .........
0
x
.....
..
:
:
x
..
X
30
U20
E
o 5
z
...
x
.......
:X
............ ........
10
:
x:
:
:
,
I
n
.
0
n
.
0.5
.
.
1
1.5
Force (N)
.
2
I
U'
2.!
0
r
n AC
U.U;
U.U IZ
0.5
;---
1
1.5
Force (N)
2
2.5
-
---
x
X
E 0.01
E 0.04
E
Z 0.008
O
' 0.03
x...
.x....
0.006
:3
Q 0.004
E
.
:
a 0.02
-
0.
.
0.002
.
'.
0.5
1
1.5
Force (N)
'
2
0
xx
:'U
0
...
.. ... ... .. ...O.. .. ... .. ... .. .. ... .
o
51
0.01 ... ....
0
0o:
Z
0I
:Xx
2.5
0
cD
0.5
:
:
1
1.5
Force (N)
:
2
2.5
Figure G-6: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CH, Trial:3).
185
Subject:ct Specimen:rig Trial:l
25
2.5
20
........
2
a)
o
I.\,
1.5 .
X2< X~~~~
x
LL
1
x
..
,>
.....
00
15
I
c)
::
10
.......
0.5
x
n
-
0
5
2
01
0
eec
0
0.5
1
Time (sec)
1.5
x:
xx
x
xX
·
·
0.5
1
Time (sec)
1.5
2
0.5
1
Time (sec)
1.5
2
,,
.."I
140
E 120
E
-
CZ100
-
80
E
o
z
60
x:x
40
X
.........
.....
x
2C
I
0
n
0.5
1
Time (sec)
1.5
I
2
0.02
0
0.4
i
-
x
c,
Do
E 0.015 .....
E
Z0.
z
m
.
.
.
.x~
.
0
~ ~~~~~
~~~~~~~
.
o
0.01 ...
' 0.2 .....
x
n
a)
0~
a)
.C_0.005
E
.·
................. -:.
:
.
:
:~~
.
.~~
x~~~~
0.1
0
o
z
0
0
0.5
1
Time (sec)
1.5
0
2
0
0.5
1
Time (sec)
1.5
2
Figure G-7: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CT, Trial:1).
186
Subject:ct Specimen:rig Trial:l
3
I
... I...
2.5
I
20
2
......
(' 1.5
o
LU-
a)
0c 10
x
1
I0
................
'.
.
-0
0.5
1
Time (sec)
1.5
0
0CI
2I
2
1
3
Force (N)
3t1I
,=
140
' .. .o. .....
c'
E 120
E
coa) 100
330
.
xXx
E
X
< 80
c-
.......................
:
2
~0
.
5 .........
a)
x
0
. ....
0~~··5~
··
·
...................
....
....
<1
E 60
: X
0
40
.. .. ...
- ....
X
.. ... .. .............
5
x
Ohr
fu
1
)
2
x
v0
3I
x
3
Force (N)
0
.
.
2
1
Force (N)
U.UZ
x
X
1 60q
z
.
~
x
X
a)
x
0
o. ..
...
c-
x
0.5 j
15
o
0.4
,
x
E
o.o .. .
E 0.015
.
a)
E
E0.3
.
X
X
x
z
0
U) 0.01
co
a)
xx
a)
Q-
.C 0.005
E
0' 0.1
- o)0.1
0
.......................
,,,,,
),xx )'xXxQ
b
z
0
0
2
1
3
0
2
1
3
Force (N)
Force (N)
Figure G-8: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CT, Trial:1).
187
.
. .
Subject:ct Specimen:rig Trial:2
C1
30
_
0.0
3
'25
2.5
xx
XX
,
20
.
o
Z
o
.) 2
)
X
X
1
'O
X
......
......
· ,{
...
......
X
(1
X
5
0.5
A'
0.5
1
Time (sec)
. .......
1.5
.
x
0
0
160
*
0.5
.:
.
i
1
Time (sec)
1.5
50
x
c' 140
E
E
" 120
-_40
x
E
x
X
30
x
C)
E
z 80
X
X
C)
x
100
60
X
X
X
) 15
o 1.5
'
-
X
< 20
....
o.)
... . . . . .
..
..
.
.. .
. ...
... .
0.5
1
Time (sec)
1.5
C
0.025
0.25
E 0.02
z
oE 0.2
zZ
) 0.015
03
..
....
·
X
X
0
--
C
.
x
<10
X
X
.
X
X
:
:
:
0.5
1
Time (sec)
1.5
le
X
0.15
X
U)
C)
a)
0.01
a)
a_
: X2.......
<
..
X
0.1
........
-
E 0.005
: 0.05
0:
o
z
A
0
n
0.5
1
Time (sec)
1.5
2
0
0.5
1
Time (sec)
1.5
2
Figure G-9: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CT, Trial:2).
188
,--
-
.
"
Subject:ct Specimen:rig Trial:2
3.5
30
.
.
.
.
3
25
2.5
xx
2
a)
20
20
o
C
o
x
x
x
15
X
o 1.5
"
0
a)
L
1
a)
X
x x
10
x
x
C)
0.5
a-
.........
..
X
X
X
:
:(.--
0
0.5
1
Time (sec)
160
--
1.5
u
2I
0
3
2
1
4
Force (N)
.,,,,.
O
°
. ' °
x
c)U
:2
xx x
x
i 140
E
E
120
.
X
x
X .........-
°
0400o
-4
x X
...
E
E3
- -
30
-
-
x
c)
a)
x
:x
F 100
E
x
0
Z 80
3
<:1
x
xX
10
X
-
....
..
0
x·
60
I
0
I
1
0.025 r
2
Force (N)
.
.
0
I
3
4
1
o1
2
2
3
3(N)
Force (N)
0.25
.
E 0.02
E
z
, 0.015
E 0.2
Z
0.15
U3
U)
.. ...
..... ... . ...
xX
:3
x
) 0.01
co 0.1
CC
X
C
E 0.005
X
I
0.05
o
0
z
0o::
n
v
0
1
2
Force (N)
3
v
4
0
1
2
Force (N)
3
4
Figure G-10: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CT, Trial:2).
189
...
- .-
Subject:ct Specimen:rig Trial:3
I
20
2.5
-X'0
-'15
:x
2
o
x
z
0
x
Q) 1.5
0
LL
Ca
x ... ... . ....
...
x
.....
1
.........X
0.5
X
.......
o
--.·
0.5
0
.
.
.
.
x
*
x:
5 ..........
x
0.
(0
----------
1
Time (sec)
1.5
............. ....
.XX
a-
·
~~~~~..
o~X,
-
:X
a)
O)
2
0
. .%-...
" ...
8
o
.
· ·-· · ·· ·
··· ·· ......
,
x
I
......
........
0o 10
2
,,
16C
14C
/
.
.
_
.
.
0.5
1
Time (sec)
1.5
.
.
.
25
CJ
2
o
f 12(
E
~~.x:
c 10C
<
E
..........
xxo
<)
8C
.-
2C
CI
3
....
0.5
...............
1
Time (sec)
..
. .. . ... ....
o°...°°.'
x
5
X
n
C)
2
1.5
X
.. ... ... .. .
C 10
E 6C
o
z
4C ..........
x:
X
a) 15
.. ... ... ... ..... ... ... .
0.0
.
,
I
.
0.5
-
1
Time (sec)
1.5
0.35
cz
c' 0.3
E
E 0.25
z
· 0.2
X
E
E 0.01Ei
a)
C') 0.01I
a)
0.
X Xx
-
--
-...
.. .. .. .
o
,3
..........
-
o
x
0.1
....
-
i
. ..
<i 0.05 ...............
o:
'O
... .. ... ...
.
"
I
0
' '
....................
a-
.c 0.0055
E
0
z
...........
''x* x'.':x' '
In 0.15
- O
x.
0.5
1
Time (sec)
1.5
2
0
0.5
1
Time (sec)
1.5
2
Figure G-11: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:CT, Trial:3).
190
---
Subject:ct Specimen:rig Trial:3
,,
;"u
3
-
Oc
2.5
:XX'
2
0
c
....O
.,Xi....,
' 1.5
o
LL
_15
:
X
z
XX....... X... i
1
;
0
''_
'
0.5
a,
1.5
2
CI
30
0
E 120
E
: X
00
X,, .
.....
80
o
z
......
-
.
......
E 20
E
.. ..
:..
0...
0.
...
.......
........
-
o..
.. ......
.
~
x
...................
...................
X .......
X
'
X
..........
.c:
':..........i........
1
2
0
3I
.
.
1
Force (N)
2
3I
Force (N)
0.02
0.35
. .
E
E 0.015
z
.... .. .. ..... xXX
.. .:....0
.........
................
. .
a, 0.15
0
._ 0.005
E
0.2
..............
X
0)
1-
. .. . .. ... ..
. . . .. . .... . ..
W 0.1
0
. .. .x.. ... .. x
x
E 0.25
D
'' x..
0.01
.
X
.. .....
.
.. ...
.. ... .... ..
CM0.3
E
xx
a)
< 0.05
X0
2
1
0
0
c
L
)
3
x
:
.............................
o
0
0
..
:O
5
~
0
z
3
0
....
(
2
1
U 10
40
20
X
X
60
X
15
X.......
C
..
.
25
X
X
CU100
x
.
Force (N)
140
E
'
X-
X
160
-
......
25
a)
0L
'
1
Time (sec)
r)
X
.......
o O:
X
X-
...
.x
0) 10
0)
o
0
O
x~~~ ........
X
X
x
o
.,
~~~~~~~'~.......................
0.5
O
O
X.o
xOll~05
:
aD
2
1
Force (N)
°~i
3
Force (N)
Figure G-12: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:CT, Trial:3).
191
-----·-------
I----· -·-·------·--
------
·-
-·---
---
Subject:jk Specimen:rig Trial:l
6
50
xo
.
x
5
-
x
x
4
oa
0
U-
40
o
x
3
o
30 .
x
x
a)
2
2
x-- x
a, 20
:.
0
0.5
a,10 .·
Q-
1
Time (sec)
200
1.5
0.5
1
Time (sec)
80
1.5
2
1.5
2
.
X0
X 0
0
X
X..x-......'
.......
2<
0
.
E
E 150
.............
X
Xx
i
U
2
X
X
.x..
x
X
I
.....
X'
... ...·X
.
cE60
E
E
a,
P
a,
40 .
C-
20 ..
..
.....
X
X
X
._ 100
l ... .X
E
.
x: ...
.
X
........
......
X
z
Z
- x......
X
.
......
-
X
x
5CII
0
X
0.5
1
Time (sec)
1.5
11
vI
2
0.035
<
0.5
0
0.2
1
Time (sec)
X
X
0.0
E
3
E 0.025
.
'''''X-
E
0..
0........
...........
0.15
X
.. . .
z
a 0.0122 . ... ..X... .... .. .... ....
03
:,
.. ... ... .
X
n
-
0
0.1
X
X:
0.05
0:
0O
0
mr
'0
o
X
.
0.5
. . . . . . . . ... . . . . . . . .
a
CZ 0.01
.E
O O.OO05
z
. . . ...
X'
x
I
.. ... . . ... ..
.
1
Time (sec)
C
0
.
1.5
2
0.5
1
Time (sec)
1.5
2
Figure G-13: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:JK, Trial:l).
192
__YI--.·_..l__ll- 1· I··LP----·-(-LLII1111_I1I1I-__·.__1--_I-_-- -1
Subject:jk Specimen:rig Trial:l
1
3U
cnA
xo
x
x
5
x
x
4
t 40
o
1
. .. ... - .:.. .
--..
.. ... ... ... ....
0
'0x
x
X
XX
0......................
z
:X
X :
L
I2
X
...
,.
.....
X
..... 0
.. . ..
20
...
2
X
a,
a_ 10
1
X
X
A
U 2
,_s~~ ~~ .
0.5
X
·
1.5
2
0
2
4
6
Force (N)
-->
8C
x
E
E 5 0 ...... o .
x
x
X
r<6C
E
x... ..........
x
._ 10 .
.
z
0
x
X
X
x
2C
X
0
X
: x:X
4C
0
50
X
0
crmrm''-''
1
Time (sec)
X
2
X
0
x
4
2
4
0
5
Force (N)
on I14R .
<
0.03
E
E 0.025 I
z
D
0.2
x
x
...
Xx
X
x
X
E 0.1
. .. ... ... ... ... .. ..
..
z
x
0.02 I
.) 0.015 I .... . ... x
.. ... ... ..
Qx
CZ 0.01 I
o
E
o 0.005
z
0
0
' 0.1 ... ... ... ... .. ... .. ... .. .X . ..X... .. .. .. ..
x
a)
v,
.. ...
a-
.. ... . ........ ............... ..............
o
0
o
CI 0.0
~~~~~~~~0~~~~~~
I
2
4
6
2
0
Force (N)
4
6
Force (N)
Figure G-14: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:JK, Trial:1).
193
-II`I-1I-1I-~I-----l-L
·IYL
·---
.__I--
__.._
. _
-1
-
1
Subject:jk Specimen:rig Trial:2
,,
50
~z:P
X
5
4
vX
Z
8 40
~~·
.x
'
...........
·
--
'.....
·
-
c
30
G,
o
LL
:
x
20
x
2
r
1
0
~10
CL
.
0
....
X
X
,,,,,,x;
.
....
-
.
.
X:
x
:rr
x
03
C
ds
'
t
^
0.5
-""'
1
Time (sec)
1.5
;
1,
2
0.5
0
1
Time (sec)
I
1.5
L
1.5
2
80
1 bU
-160
E
E 140
. .......X:..
X:::0
< 60
E
E
......... ..
.......
....
Xx
-. ....
X ...
X
6 120
X
40
x
X
·. 100
..
.
....
.
..
.
o 20
o
Z 80
:
X
X
x
X
x
rn
.
vv
.
0.5
0
I
I]
.
1
Time (sec)
1.5
0
2
0.035
n
0.03
<
' 0.025
-
.
xi
..................
·
-..
1
Time (sec)
I -
c'j
' ... . . ... ... ...
.
X
0.5
x
E 0.15
Z
....................
0.02
v0
.
0
. ... ...
)0.015
C
x
i
cO 0.01
U,
... ... .. ....... ... ... ... ... ... ...
a)
O ::
X
,x
xX
'1 0.05
0.
o 0.005
z
:
:
0
*
(3
0
0:
0~
13
0.5
1
Time (sec)
1.5
2
0
0.5
1
Time (sec)
1.5
2
Figure G-15: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:JK, Trial:2).
194
-
--
----
·-----------
·--- ----
--·-- ·----
I
-
I_--·_--_·1*--·-IIII
_lil
-
-I1X
I_
Subject:jk Specimen:rig Trial:2
50
x
5
..........
4
v 40
.....
30
.......
x:
Z
z
a)
X·..
O
...
......
,,
3
.....
x
.. ..
..
:
:
X
....
O
:
.........
C
a)
: .....
:
'.°
.....
:
..-x----.
~x
X
X
X
:
o
0
LL
x
:
.X.x .......
2
~
:..
11
I
~ -. -
--o--:-
-
.:
0 20
10
' .....
-' x-
--
-
0.5
C
18( 0
''
1
Time (sec)
X
o
X
xXhhhlr~rrr
-----
X
X
X
n
2I
1.5
0
x:
x
I
4
2
Ors
.
OU
.
x0X
'
0
0
0
-16(
0
C\
0
E
E 14
X
...
...........
X
4
.
0
E
4
2
0.2
0.03.
o.o 3 .. . ... .. ..x... ... ... ... .. .. ....... .. .. .
E
E
E 0.02
Z
X
. . .
. ... . . . . .....
v,
.,
E 0.15
-
.......
z
...
-0.05 ....
... ... .. .. ... ..
x:
6
Force (N)
Force (N)
0r
..............................
.C
O.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .....
no
0.05
u c
..
4
2
;X
00
6
O
;
,,
o
0
K
x
X
.
2
E
0 0.00
z
X'-
X
x
6(
C 0.0
...
20
..............
...
.
aQn
X
O 40
.
-.
.C 10(
E
' X
o
Z 8'
COxx
30
2 0.015 .. .. .x
x0
E
E
x
2 . ...
X f
60
..
..
.......
. .. ... ... .
l 121
6
Force (N)
4
2
6
Force (N)
Force (N)
Figure G-16: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:JK, Trial:2).
195
----·-----------------
-·-···-····-- ·----------
·--
-·-·-------·------
·-------
-
-----
-s
I
Subject:jk Specimen:rig Trial:3
60
7
6
-
..
x
.-
.
. .. ... . .
. ....
.. ... . .
o
LL.
o 30
0
x
x
20
20
x
x'
0
x.
A
AA
ILA
0
o
0
x
2
x
C
.... . ....
........
:X
:x
03
o3
rw
. .... ... .. ..
X
s. . . . ...
. . . . . ... .
.. ........
N 40
4
1
.. . .X. .
o-
5
z
50
-
0.5
a)
.... 0
10 ... .. .. ..Xx.. ..
0
1
Time (sec)
1.5
0
2
20
x
0.5
0
1
Time (sec)
1.5
20
120
18
0 Xx
E 160 E
co 14 !0
O
ci)
< 12
.
......
x
x. .
X
.
100
.....
E 80
E
....
x
...
E
.... ......
c3
x
.C
E 10
a)
60 ...·
03
40
0I
':'
.'
....- ...
.........
'
0
.......
. .......
......
: . .. .. ...
...... .. ...
.....
0
2
20
8
60
0
~
0.5
1
Time (sec)
1.5
1
Time (sec)
1.5
2
cx
x
E 0.0:3 .. .. ... ... . ..x
X
.x
2
... ... ... .: ... ...
a)
a)
:o
.. .. .. .
v
0
0.5
...........
0. 0)5
~
.2
0
0
0
X
I....1
CL
0 .... ..
X
0
z
Xx
O.
'3(
()
()
. . . ... . . . . . . . . . . . . . . . . . . . .
0
1
1
E
CO
E
0.5
0
C
E
.C 0.0
I
n
2
0.0
o 0.0
x
1
Time (sec)
..........
..........
..........
0
0
A~~~~~~b
1.5
2
0
0.5
1
Time (sec)
1.5
2
Figure G-17: Various contact variables, plotted against time, calculated from the image and
force data obtained using low magnification (Subject:JIK, Trial:3).
196
Su bject:jk Specimen:rig Trial:3
7
60
o50
0
~~
~~~~~~~.
5
-4
. .. ... ... ...
..
..
. ... . .
.
...
.
.
. .
. . .....
. .
.
C
0
U-
Q)
o3
X
1
LI--0
0
O
......
0.5
' :
a)
0.
0
X ......Y
----·-------I
1
Time (sec)
1.5
o
x
OO
x
.X
30
xX
20
x
10
X
2
6
4
Force (N)
8
I '"
200
!o0
180 00 0
E 160
E
cz140
*
x~
~~~~~X.....
... ~ ...
~~~0........
x
........
x~.........
: 0..
100
OX
. oi .
<
EC
........
X
~
E 80
.
.0. . . . . . . .
0 I . . . . ..
IX
.
0
...
...
.. .. .. .
E
x~~~~ ...
<
120
-a
. ... ...... .. ... ... ... ..
60
a
x~~~~~~~i....
-.i
.2
O
x ...
E 100 ....
o
z0
80
60
~X
'
U
2
O
0
o0
2
0
! 40
. . . ..
a)
0
u
:
0
6
,
,
i
40
00
2
4
Force (N)
6
0
rrrrl
'
..... X.... ...........
U.-
E
X
x
x
20
0
v~~X
2
4
Force (N)
6
8
0. 2
U.U4
X
;R
c'J
E
E 0.03
z
x
>6
E 0.1 5~··
E
X
·-
--·i
· · ·-
· :--
X
X:O
a)
n0.02
U)
x
a
0
E
0
z O
0.
.. . . . . . .
.. .. ... ... .
0.O. .......................
0:
.
.
. .
.
0.0 )50
0
0
0
C
2
4
Force (N)
:0
L.)
.
6
0
8
. . ...........
~x
x
,
0
x
. . . . . . . . . .:. . . . . . . . . . .
a
x
._ 0.01
0.
U)
0
2
4
Force (N)
6
8
Figure G-18: Various contact variables, plotted against contact force, calculated from the
image and force data obtained using low magnification (Subject:JK, Trial:3).
197
Subject(CH) Specimen(RIG)
... ... .... ........... .. . .............
,e
2 .5 ..... .... .......
:..
E
2
.
....
.... .
Contact Force
..........
3 i
2
m
W1 1 . . .
..
I.........
2
.
............
. ... ·
,+~
........+:
LL
......
.... ...
1
.. .......
· p~se
0.5
mim
,,,,,,
...........................
-
2 1.5
.......
0 0 .5
.
2.5
.........
e
..........................+
:
0
0
0.5
1
Time (sec)
Percentage Contact
, .
........ . .... 0+
2
Displacement (mm)
Per.Contact vs. Force
50
..'... . . . . ...
Z°40
-4C
5
++*6
c 30
0
x
'o 3C
:
nT
0 10
2C
_ 20
a)
a_
X,
10
'C
C
1
2
Displacement (mm)
0
1
0
2
Force (N)
3
Figure G-19: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CH, Specimen: rigid).
Subject(CH) Specimen(AB4)
.........
.5
....
Contact Force
..............
..............
..
.....
.................
O
oa
2
E
3
2
·e
: ............
.
...
:. M,a .......-
E 1.5
..
02
a)
. .. .........
..............
0
1I
.
1L
:
:..
.
p+
1
a
c,
..
.5 ......
........................
a
sI
IPI
u
U
U.3
0
1
1
2
Displacement (mm)
Per.Contact vs. Force
Time (sec)
Percentage Contact
...........
++
+++
.. +
+
.......... .........
30
4
++++ RE
-c
0
...........
0 ... ........: ...............0o:
++++
oeOx:
0
10
X x..... .. ....... ..
.... ....
................
40
a
0~
-
............
30
.
g . . .......
............
.............
.................
.
..
x. ..
+.0
3..
0
.......
Cu
0
20
ai
0. In
. ....... .++ .. ................
:
0 ....
+x
-3
I
1
2
Displacement (mm)
0
1
2
Force (N)
3
Figure G-20: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CH, Specimen:hard).
198
Subject(CH) Specimen(BA4)
Contact Force
2.5
2, 5 . .. .. .. .......... . ..........
.
.... .... ..... . ................
2
E
E
U
U
E
z .1.5
c
1
LL
Cv
0
0.5
O.
0
0.5
Time (sec)
Percentage Contact
5I0
..... .. ..
40 ......
...
... .... ... ......
0
03
1
B" ..
to
'c0o 30
0
10
0
a)
................
¢
IL
1
2
Displacement (mm)
Per.Contact vs. Force
0 1
2~~~~~
o.
....
r
0
A\
0
1
2
Displacement (mm)
1
0
2
Force (N)
Figure G-21: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CH, Specimen:medium).
Subject(CH) Specimen(CA4)
Contact Force
.... ........... ........ .... ......
.5 . ..
2. 5
E
E
E
. ... ..
.;S...
... .. .... .....
....
2.
5
C
... ......... !
.5............
.
0.5
Time (sec)
Percentage Contact
m
.
-5 00 ............
4a 0 ... .
.5
0 0
10
0
0
A.
.
......
.
........................
o 1.
L-
0
.5
1 . .
6
..
0
.... ..
0.
0
.
............ ...
00.
aD.
3 .....
....
2
..................
!
1
... .. ...
16 0
l
0
. .
:.
1
2
Displacement
Per.Contact
vs.(mm)
Force
x*
:
..
1
1
2
Displacement (mm)
0
1
2
Force (N)
3
Figure G-22: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CH, Specimen:soft).
199
Subject(CT) Specimen(RIG)
Contact Force
... ................ .................... I
I
j .·(· 5·
·
.s
:
· · . ...............
E
2.5
..............
.
......
-
I
0
2
a
E
z
.
1
1
o
.o
1. . . .. .................
o
5
.. .... .: .
0
.... .......:
0.5 ..
Percentage
Contact
..........-.-Us U......................................
0.2
0.4
0.6
Time (sec)
0
... ...........
50.51
0
0
....... ........
.
...... ... ... .
X xoO
x
x
... ......
o
°
+
o
.V
.
0.5
1
1.5
Displacement (mm)
Per.Contact vs. Force
I'.
30
3C
1
2Co
V 20 ..-
+ -
0
o
x X0
ic
LU1
O
:X
o
0
xo
o
Xo+........
0) 10
I
a-
.
o
O
+x
_o
n
.
.
.
0.5
1
1.5
Displacement (mm)
0
1
0
2
Force (N)
3
Figure G-23: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CT, Specimen: rigid).
Subject(CT) Specimen(AB4)
Contact Force
..... ... .
2..5 .
........
........ .... ............i
4
E
E
0) 1 2 ......
E
.... ................ ...m
o
cu
.. . ....
. . .... .............
02
00.
i O.5
5. m
0
1
U~~~~~~~~~ ..
U
, x
I ~
>x+¢X@W
516 ''6
U,
0.5
Time (sec)
Percentage Contact
1
0
6
1
2
Displacement (mm)
Per.Contact vs. Force
60 ........ :......... .................. 6 0 ....
:.. .......... ........ . .......
-5 60
,
30
x.,
.
:
x
.. 30": '
x0
0
XX
0
ox+o
ca20~···~SB.0.
: ...... ..
20oxO
o
,'D 2
0
......
(40 .......... x:. ....
4
03
.
+
+
+
.. ......(........
'
.
x..............
.......
.0
1
2
Displacement (mm)
0
1
2
3
Force (N)
4
Figure G-24: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CT, Specimen:hard).
200
.
_
-
-
-i
-
Contact Force
...... .......
. .... . I .. .. ... . .. .. ..: ... . . .."
.
Subject(CT) Specimen(BA4)
a
''''''''''
'''''
6
2.5
...............
~~~~~~:D~
.,.....
_
E
2
_
::::
,@:
:I·'
U
5
,ie
S
82
.......................... :!..........,...!....... . .....
ID1.5
E
' .~~~~
mm
sZ
1
U
:U
U
f
o 0.5
..·.......
..::.
P
I
C
3
;
*: U
R
... . . .. .I .. . .. . .:. .
-9
QIP
2
L
1
m
i
U-
x
.
2-4
.
C
0.5
1
Time (sec)
Percentage Contact
. ................. ......
D
2
1
Displacement (mm)
Per.Contact vs. Force
. .....
......
.. .. -
I
x-o x x
+x
60
o 60
-
ox
ox
40
R
0 40
........
r
.......... *.....,
E 40
0
o
.'
_ 20
20
I?:
ffl
"'
II
0
0
0
1
2
Displacement (mm)
2
4
Force (N)
6
Figure G-25: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CT, Specimen:medium).
Contact Force
Subject(CT) Specimen(CA4)
......... ...I .... .. .. . .... ..
E
E
.... ..
.
E 1.5
.+
,4
z
-
... .....
(.)-
.....:
..............
x +o .
X+O
.+o
a
°
0.5
Time (sec)
Percentage Contact
0
1
.............
0 ..
....... ...... .
a
LE
rV
I3
x+· ....
x+oI
....
.....................
3
... ...........
5
oi~::
0.5
1
1.5
2
Displacement (mm)
Per.Contact vs. Force
. ..
f
80 :: :::::::::::::::::::::::::::::
80
F60
o 40
0
..
·
.6 0 ..........
O...
+:
X$+O
x:0O
X*0ou
;.............
0
:
0
:
.......... ...
:
.....
0s
o
C)
.....
20 ...
xox+O
.+~
n: :!Y
0
x o
fa
.
a
a)
c,
........
... ....... . ... a .......
',
2
E
...................
......
0
0o
20
..........
. ....... I.......
;
0
0.5
1
1.5
2
Displacement (mm)
2
4
Force (N)
Figure G-26: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:CT, Specimen:soft).
201
'-"I------
I
--
Subject(JK) Specimen(RIG)
.........
2.5
Contact Force
................
.......................
2.5
E
2
....
0
..
........
o
........
.... .. ........ .. ......
2
1.5
E
0
a
............
:...
isl
1.
S
mO ............
lB~~~
B~~~E
1
In
X
O+
5 0.5
0
d/-
U
xob
1
2
Displacement (mm)
Per.Contact vs. Force
C
0
1
U.5
1
Time (sec)
Percentage Contact
C,.
.....................................
.............................
3
.o
3C O............................ ...........
2_5
- -
-
--
o-~~-
.......
2C
15
1
....
00:
. . ....
iZ :l.
lB~~~
*I
...
. ++
.. +..
10. ,,........
.0
O 15 5 .
oOX
X
O+
+
+
.... x - ......
0
0
x "
5
--:.
.-
O
n5xA~~~~
0
':
--nO -X............
o
ox
1
2
Displacement (mm)
.......... :
p;~'···········
.........
-··~
1
0
·
~
·
2
Force (N)
Figure G-27: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:JIK, Specimen: rigid).
Subject(JK) Specimen(AB4)
Contact Force
........................................
2.
...............
.
.....
.... ........ -
E
E
5
c1
z 4
E
l
5.
a)
L
c 0.
O
0{fi
0
0
..
...
.......................
...:
2 .......
PJ '
........... ....
1
0
0.5
1
Time (sec)
Percentage Contact
... .... .. .. .. . .... .... . ..... ..... .. .. ..X
50 .
..........
. .......
23
.,,
]
i~~~~.
.......................
6
... .. ....... ....
1.5
....
. .
40 ............. .. ... .....
40Mb
W.WWWOr
1
2
Displacement (mm)
Per.Contact vs. Force
I
+
......
o
30 ...... ...............
02
a-
.........
20 ........
.i
,o
1
0
pas:....................
1
2
Displacement (mm)
6
Force (N)
Figure G-28: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:JK, Specimen:hard).
202
.
~
..
.
~
~
~
I-
-
Subject(JK) Specimen(BA4)
............... .............. .........
...............
2..5
E
2
Contact Force
.
..
,............
......
......
4
.
.#0
3
3
......
r,
z
c
.5
. .
...
+~
........
a)
0
LL
:
0
*0t.
-- ---
O-
1
.50
0
U
a
-.
0.5
Time (sec)
Percentage Contact
0 ... .... -
N
a
E)0
|· ·_
I__mm
I I
1
2
Displacement (mm)
Per.Contact vs. Force
1
.......::::::::::::::-:--:..,
.......:::......
0
.
60 . .... . ..
,
:.
0....>q~......
>
r-+
0
+x
0 '0
o0
~-··
*0
t 40
to:
I
o 30
2,
20
+ 0 0+o
a.
10
0+0
{I
r~+
1
2
Displacement (mm)
0
0
1
2
Force (N)
3
4
Figure G-29: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:JK, Specimen:medium).
Subject(JK) Specimen(CA4)
Contact Force
.... . .......... .............
2.
~~2~~~l
E
E
5
a
9X
z
,..
,2 ....
a
a
0O)
......-
-.
x ...- .
0
1
0.
i50.
n~
0
0.5
Time (sec)
Percentage Contact
1
. .... ...
0
03 0
a-
Za
0
0
....
..
.
,.
230
.0
10
0
1
................................
,.
· 6tiM
j
50[
5
...........
C4
0
i~
1
2
Displacement (mm)
Per.Contact vs. Force
0
6
0
S
.
1o0ol
.
..
.
..........
. ......
....
...... .. .. .. .
......
. . .20 ..
.
0
.A
2
1
Displacement (mm)
0
1
2
Force (N)
3
Figure G-30: Percentage contact area calculated from the image and force data obtained
using high magnification (Subject:JK, Specimen:soft).
203
._I-·*··~ll-`~~
___C_
-~
Bibliography
[1] G. A. Baxes. Digital image processing. John Wiley S&Sons, Inc., New York, 1994.
[2] E. C. Botha and D. P. Casasent. Applications of optical morphological transformations.
Optical Engineering, 28(5), 1989.
[3] Chris
Brislawn.
The
FBI
fingerprint
image
compression
standard.
http://uww. c3.lanl.gov/ brislawn/FBI/FBI.html, 1995.
[4] Chris Brislawn. How wavelet/scalar quantization works. http://ww.c3.lanl.gov/ brislawn/FBI/OverCompress/lIowlt I'orks/howitworks.html, 1995.
[5] D. P. Casasent. Optical morphological processors. SPIE: Image Algebra and MAorphological Image Processing, 1350:380-394, 1990.
[6] D. P. Casasent and Schaeffer R. Optical gray scale morphology for target detection.
SPIE: Image Algebra and Morphological Image Processing II, 1568:313-326, 1991.
[7] Ho Chih-Hao. Human Haptic Discriminationof Thickness. Master's thesis, Massachusetts Institute of Technology, 1996.
[8] F J Clark and K W Horch. Kinesthesia, volume I of Handbook of Perception and Human
Performance - Sensory processes and perception, Eds. K. R. Boff, L. Kaufman and J.
P. Thomas. Wiley & Sons, New York, NY, 1986.
[9] Louis Coetzee and Elizabeth C. Botha. Fingerprint recognition in low quality images.
Pattern Recognition, 26(10):1441-1460, 1993.
[10] Kiran Dandekar. Role of Mechanics in Tactile Sensing of Shape. Ph.D. thesis, Massachusetts Institute of Technology, 1995.
204
_
1·
11-··1-1-
-)1·- I_--l-_II·--^--IIYI-_·_111
__111_11111_1_11_1·_111-1_1_1___1_11_11
[11] I. Darian-Smith and P. IKenins. Innervation density of mechanoreceptive fibers supplying
glabrous skin of the monkey's index finger. Journal of Physiology, 309:147-155, 1980.
[12] N. I. Durlach. A decision model for psychophysics. Manuscript available at Communication Biophysics Group, Research Laboratory of Electronics, M.I. T., 1968.
[13] N. I. Durlach, L. A. Delhorne, A. Wong, W\. Y. Ko, W. M. Rabinowitz, and J. Hollerbach.
Manual discrimination and identification of length by the finger-span method. Perception
and Psychophysics, 46(1):29-38, 1989.
[14] Frances.
Having
fun
with
science:
How
to
be
a fingerprint
expert.
hlttp://wuzvw.gifi.org/educatioln/clonlara/index24.1itml,Oct. 1994.
[15] ID. Freides. Human information processing and sensory modality: Cross-mlodal functions,information coin plexity, memory and deficit.
Psychological Bulletin, 81:284-310,
1974.
[16] Y. C. Fung. Bio mechanics: Mechanical Properties of Living Tissues. Springer-Verlag,
N.Y., second edition, 1993.
[17] R. C. Gonzalez and R. E. Woods. Digital image processing. Addison-Wesley Publishing
Company, 1992.
[18] A. NV.Goodwin, IK. T. John, and A. H. Marceglia. Tactile discrimination of curvature
by humans using only cutaneous information from the fingerpads. Experimental Brain
Research, 86:663-672, 1991.
[19] Lee H. C. and R.E.Gaensslen. Methods of Latent FingerprintDevelopment. Advances in
Fingerprint Technology, Eds. H. C., Lee and R.E.Gaensslen. Elsevier, New York, 1992.
[20] R. Harper and S.S. Stevens. Subjective hardness of compliant materials.
Quarterly
Journal of Experimental Psychology, 16:204-215, 1964.
[21] R. S. Johansson and A. B. Valbo. Tactile sensibility in the human hand: Relative and
absolute densities of four types of mechanoreceptive units in glabrous skin. Journal of
Physiology, 286:283-300, 1979.
205
___IIIIIII__Lll__r__I__·---
.I-
_YY_-IIII----I_
I
----
-
I·I
--
-------
--
-
-
[22] R S Johansson and G Westling. Roles of glabrous skin receptors and sensorimotor
memory in automatic control of precision grip when lifting rougher or more slippery
objects. Experimental Brain Research, 56:550-565, 1984.
[23] IK. L. Johnson. Contact Mechanics. Cambridge University Press, Cambridge, 1985.
[24] R. Johnson and Bhattacharyya G. Statistics: Principles and Methods. John Wiley &
Sons, Inc., New York, 1985.
[25] L A Jones. Matching forces: constant errors and differential thresholds. Perception,
18:681-687, 1989.
[26] L. A. Jones and I. V. Hunter. A perceptual analysis of stiffness. Experimental Brain
Research, 79:150-156, 1990.
[27] D. Katz. The judgements of test bakers. a psychological study. OccupationalPsychology,
12:139-148, 1938.
[28] S. J. Lederman and R. A. Browse. The Physiology and Psychophysics of Touch. NATO
ASI Series, Sensors and Sensory Systems for Advanced Robots, Ed. P. Dario. SpringerNVerlag, Berlin, 1988.
[29] J. S. Lim. Two-dimensional signal and image processing. Prentice-Hall International
Inc., Englewood Cliffs N.J., 1990.
[30] C. A. Lindley. Practical Image Processing in C. John Wiley & Sons, Inc., 1991.
[31] D. S. Moore and G. P. McCabe. Introduction to the Practice of Statistics. W.H. Freeman
and Company, New York, 1989.
[32] Lawrence O'Gorman. An approach to fingerprint filter design. Pattern Recognition,
22(1):29-38, 1989.
[33] X D Pang, H Z Tan, and N I Durlach. Manual discrimination of force using active finger
motion. Perception and Psychophysics, 49(6):531-540, 1991.
[34] X. D. Pang, H. Z. Tan, and N. I. Durlach. Manual discrimination of force using active
finger motion. Perception and Psychophysics, 49(6):531-540, 1992.
206
-IIS-L-LII·I
-_Y-..-L-*_·---·m_.
--- --.1_.-11_1__·--^_1-.-1_ 11-111111---
[35] Roland P.E. and H. Ladegaard-Pedersen. A quantitative analysis of sensations of tension
and of kinaesthesia in man. Brain, 100:671-692, 1977.
[36] NV. H. Press, S. A. Teukolsky, W\. T. Vetterling, and B. P. Flannery. NAumerical Recipes
in C. Cambridge University Press, Cambridge, 1992.
[37] C. E. Sherrick and R. \V. Cholewiak. Cutaneous Sensitivity. Handbook of Perception and
Human Performance- Sensory processes and perception, Eds. IK. R. Boff, L. IKaufman
and J. P. Thomas. \Viley & Sons, New York, NY, 1986.
[38] C. E. Sherrick and R. \N. Cholewiak. Tactual Perception. Handbook of Perception and
Human Performance- Sensory processes and perception, Eds. K. R. Boff, L. KIaufman
and J. P. Thomas. Viley & Sons, New York, NY, 1986.
Human performance in controlling normal forces of
[39] MI. A. Srinivasan and J. Chen.
contact with rigid objects. Advances in Robotics, Mllechatronics,and Haptic Interfaces,
ASIME DSC- VOL:49, pages 119-125, 1993.
[40] NM. A. Srinivasan and R. H. LaMotte. Tactile discrimination of shape responses of slowly
and rapidly adapting mechanoreceptive afferents to a step indented into the monkey
fingerpad. Journal of NAeurophysiology, 7:1682-1697, 1987.
[41] M. A. Srinivasan and R. H. LaMotte.
Encoding of shape in the responses of cu-
taneous mechanoreceptors. Information Processing in the Somatosensory Systems Eds.
O.Franzen and J. Westman. Macmillan, London, 1991.
[42] M. A. Srinivasan and R. H. LaMotte. Tactual discrimination of softness. Journal of
Neurophysiology, 73(1):88-101, 1995.
[43] M. A. Srinivasan, J. M. Whitehouse, and R. H. LaMotte.
Tactile discrimination of
slip: surface microgeometry and peripheral neural codes. Journal of N'europhysiology,
63(6):1323-1332, 1990.
[44] J. A. Swets. Signal Detection and Recognition by Human Observers. Wiley, New York,
1964.
207
1______1__1___·1__111-
11
·1_-·--_11
1(-·-----
l·L---·-
IIi-_----···.--___-I_--
.1
-^IIC.
II^-
*-_- I-lil·l--LI--l.-.
^. -111---1111111111111
XI-
I_
I
-
[45] H. Z. Tan, N. I. Durlach, G. L. Beauregard, and M. A. Srinivasan. Manual discrimination
of compliance using active pinch grasp: the role of force and work cues. Perception and
Psychophysics, 57(4):495-510, 1995.
[46] R. D. NWalk and H. L. Pick. Intersensory Perception and Sensory Integration. Plenum,
New York, 1981.
[47] G. -I. \Veinberg, J. A. Schumaker, and D. Oltman. Statistics: an Intuitive Approach.
Brooks/Cole Publishing Company, Monterey, CA, 1981.
[48] R. B. SWelch and D. H. Va.rren. Immediate perceptual response to intersensory discordance. Psychological Bulletin, 88:638-667, 1980.
208
_1 ___1_1__III_11IIII_1YULII---YI
-·IIIIIXIII_--_ll.U.I
·_---III-·----LI
--·