Sensors and Actuators A 104 (2003) 6±10
Letter to the Editor
A two-stage discrete peristaltic micropump
J.M. Berga,b,*, R. Andersona,b, M. Anayaa, B. Lahlouhb,c,
M. Holtzb,c, T. Dallasb,d
a
Department of Mechanical Engineering, Texas Tech University, Lubbock, TX 79409, USA
b
Nano Tech Center, Texas Tech University, Lubbock, TX 79409, USA
c
Department of Physics, Texas Tech University, Lubbock, TX 79409, USA
d
Department of Electrical Engineering, Texas Tech University, Lubbock, TX 79409, USA
Received 14 July 2002; received in revised form 1 November 2002; accepted 2 November 2002
Abstract
We demonstrate a discrete, two-stage peristaltic micropump for applications in micro¯uidics. Prototypes are fabricated in polydimethylsiloxane (PDMS) with water as the working ¯uid. Off-wafer compressed nitrogen gas provides the actuation energy. The device may be
operated in three- or two-stage modes for direct comparison. We show that two-stage pumps have comparable ¯ow rates to the three-stage
counterparts, and produce 2/3 the static head. Our results suggest that two-stage pumps may be a viable choice under low backpressure
conditions where available on-chip area or the number of external connections is limited.
# 2002 Elsevier Science B.V. All rights reserved.
Keywords: Micropumps; Micro¯uidics; Peristaltic; PDMS; Microfabrication
Fully integrated ``lab-on-a-chip'' systems exploit on-chip
micropumps for ¯uid handling. Peristaltic pumps are well
suited for this purpose [1]. Peristalsis occurs when traveling
contractile waves in the walls of a tube induce a net ¯ow. This
mechanism has been used in macroscopic peristaltic pumps,
such as those consisting of moving rollers compressing a
¯uid-®lled ¯exible tube. Here, ¯uid is conveyed in the
volumes between the compressed regions resulting in continuous peristaltic transport. In contrast, peristalsis may also
be driven with a ®nite number of ®xed actuators, or ``pumping
stages''. Flow is induced by proper phasing of the actuation
sequence, approximating a traveling wave. We refer to this as
discrete peristaltic transport. Although continuous peristaltic
designs have been implemented at the mini-scale [2], most
peristaltic micropumps are discrete [3±7].
We de®ne a discrete peristaltic pump as a device that
induces a net ¯ow, based exclusively on the phasing of a
®nite number of otherwise symmetrical actuators. We
exclude from this consideration check valves, ¯uidic diodes,
or other means of producing a preferential ¯ow direction.
Many micropump designs are based on a single actuator
combined with one-way valves to limit the ¯ow to a single
direction [8±10]. One-way valves are dif®cult to fabricate
*
Corresponding author. Tel.: 1-806-742-3563; fax: 1-806-742-3540.
E-mail address: jordan.berg@ttu.edu (J.M. Berg).
and may break or foul in operation. A simpler implementation of this class of pump is based on passive ¯ow diodes,
such as converging/diverging nozzles [11±13] or Tesla
valves [14]. These are simple to fabricate and resistant to
fouling [15], but share the limitation of being inherently
unidirectional with more complex valved pumps. Furthermore, the diodic structures may take up signi®cant area on
the chip surface.
The potential bene®ts of integrated microanalytical systems may be fully realized by squeezing as many functions
as possible into a single micro¯uidic device. The challenge
of transmitting ¯uid, power and information to and from an
array of densely packed components is formidable. On-chip
micropumps should be designed to achieve two important
objectives [16]: (i) minimize the number of required external
connections, and (ii) reduce the device footprint. Both of
these may be accomplished by reducing the number of
actuators. The most commonly implemented peristaltic
micropump design uses three (e.g. [4,6,7,17]) or more
actuators [5]. To our knowledge, none uses less than three
actuators, in agreement with conventional wisdom that three
is the minimum [4].
We demonstrate here a working, two-stage peristaltic
pump and directly compare it with an identically fabricated
three-stage counterpart. The paper is organized as follows.
We describe the fabrication methods for pumps that may be
0924-4247/02/$ ± see front matter # 2002 Elsevier Science B.V. All rights reserved.
PII: S 0 9 2 4 - 4 2 4 7 ( 0 2 ) 0 0 4 3 4 - X
J.M. Berg et al. / Sensors and Actuators A 104 (2003) 6±10
operated in either two- or three-stage mode. We then present
a simpli®ed analysis of ¯ow rates for two- and three-stage
peristaltic pumps and report our initial performance comparisons using these devices. Finally, we discuss our results.
Our test devices consist of a 1.5 mm thick glass wafer
with a diameter of 50 mm, bonded to a 2.5 mm thick
patterned polydimethylsiloxane (PDMS) layer (GE Silicones RTV 615), bonded in turn to a second 5 mm thick
patterned PDMS layer. Each device contains two pumps.
The glass wafer serves as a mechanical support, as a capping
layer for the ¯ow channels, and as an attachment point for
¯uid connections. The thinner PDMS layer contains channels for water ¯ow. The channels were de®ned by casting
with a negative mold, produced using a 165 mm thick
negative resist (Microchem SU8-100). The pattern was
exposed using standard photolithography. For each pump,
the components of this layer consist of two circular input/
output reservoirs of 4 mm diameter, connected to three
circular pump chambers of 3 mm diameter (resulting in a
pump-chamber volume of 1.17 ml) by 100 mm wide channels. Access holes with 1 mm diameter were drilled in the
glass wafer to access the input/output reservoirs, using
barbed ®ttings. Two silicone tubes (1.575 mm i.d.) with
16.5 cm length were placed over each barbed ®tting and
sealed with silicone. These tubes were in turn connected to
the pump test apparatus, which uses vertically ®xed silicone
tubing of the same size. The thicker PDMS layer contains
circular gas bladder actuators of 6 mm diameter, used to
collapse the water-®lled pump chambers. These chambers
were 2 mm deep, and were created by casting onto 6 mm
diameter Te¯on slices glued to a glass substrate. Six pieces
of silicone tubing (0.762 mm i.d.) were embedded in this
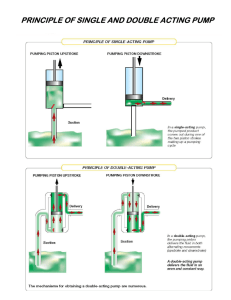
layer for connection to a nitrogen supply cylinder. Fig. 1
schematically depicts the structure of the stack. External
connections were made using double-sided barbed polycarbonate connectors, with barbs cut off on the device side, and
glued to the glass wafer.
7
Both PDMS layers were molded using silicone elastomer
base mixed with curing agent in a 6:1 ratio. The mixture was
vacuum degassed for 10 min, then poured and cured for
60 min at 80 8C. The device was assembled using the
bonding technique described in [7]. Resin was mixed with
curing agent in a 30:1 ratio, and spun on to the glass wafer at
3000 rpm. This ®lm was measured and found to be approximately 30 mm thick. The ®lm was cured for 30 min at 80 8C.
The ®lm was cleared over the drilled access holes. The ®rst
6:1 PDMS layer was placed, patterned side down with 30:1
PDMS ®lm upon it, and cured for 60 min at 80 8C. The result
was irreversible bonding. The process was repeated, spinning 30 mm of 30:1 PDMS onto the exposed, planar PDMS
side of the PDMS/glass stack. The second 6:1 PDMS layer
was then aligned, and placed patterned side down on the
spun layer. The entire device was cured for 90 min at 80 8C,
securing the second bond and completing the fabrication.
We now model the ¯ow rate at zero head pressure for
several pump actuation sequences. The chambers are modeled by pistons, which are assumed to reduce the pump
chambers from initial volume V to ®nal volume 0. The actual
expressed volume will depend on head pressure, ¯ow resistance, and the resistance difference between the forward and
backward ¯ow paths. The ¯ow out of a collapsing chamber
is assumed symmetric, unless constrained by a collapsed
neighboring chamber. This symmetric analysis assumes that
half the chamber volume ¯ows out of each the upstream and
downstream ports. In reality the opposing head pressure will
cause more ¯ow to exit the upstream port, resulting in a
lower ¯ow rate.
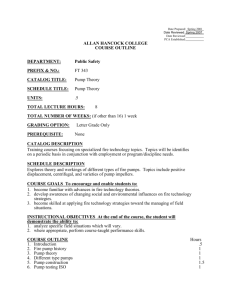
Fig. 2 shows the actuation sequences used for our analysis
and experiments. The chamber volumes and net in and out
¯ows are shown. For the three-stage pump shown in Fig. 2a
at least one actuator is closed at all times, insuring no back
¯ow. Neglecting ¯ow resistance, this pump should be able to
generate static head approaching the gas blister pressure.
The ¯uid transfer per cycle is V. Fig. 2b shows the truncated
Fig. 1. Schematic of a portion of the pump stack showing one pump chamber, one air blister, and one input/output reservoir.
8
J.M. Berg et al. / Sensors and Actuators A 104 (2003) 6±10
Fig. 2. Pumping sequences: (a) three-stage; (b) truncated three-stage; and (c) high flow two-stage.
three-stage pumping sequence obtained by actuating only
the ®rst two actuators in the baseline three-stage sequence. It
transfers volume V/2 per sequence period. Fig. 2c depicts a
second two-stage sequence with slightly higher predicted net
¯ow V. In contrast to the three-chamber case, in the truncated
three-stage and two-chamber pumping con®gurations the
channel is open to bi-directional ¯ow. Table 1 shows the
period of one full pumping cycle of each sequence in Fig. 2
and the predicted ¯ow rates.
The analysis predicts that the zero backpressure ¯ow rate
of the truncated three-stage pump will be 50% of the threestage pump, while the two-stage pump is predicted to have
80% relative ¯ow rate to the three-stage design. The penalty
associated with eliminating a pump chamber and going from
the three-stage to the two-stage actuation sequence may be
acceptable in light of the 1/3 reduction in complexity and onchip area.
We performed experiments to test these predictions. The
three pump sequences were implemented on the test device
using an in-house setup and control program based on
commercial components. Nitrogen, regulated to 20 psig
(138 kPa), and the ambient were used to drive the air blisters.
When connected to the gas supply the air blister in¯ates,
collapsing the pump chamber. When vented to ambient, the
air blister de¯ates, and the pump chamber regains its original
shape.
Fluid levels were initialized to be equal in the ¯uid input
and output tubes. For these series of tests the nominal height
Table 1
Analysis of the pumping sequences in Fig. 2
Sequence name
Full cycle
period
Volume transferred
per cycle
Volume flow
rate, q0
Three-stage
Truncated three-stage
Two-stage
3T
3T
4T
V
V/2
V
V/3T
V/6T
V/4T
Full cycle period, volume expressed per cycle, and subsequently predicted
flow rates based on symmetric pump chamber analysis. T: single chamber
actuation time; V: pump chamber volume.
was set as 46.5 cm, corresponding to 4.56 kPa of hydrostatic
pressure at the device level. Thus, the source pressure is
about 30 times the hydrostatic backpressure. The pump is
activated and the column height is measured at ®xed time
intervals. The differential equation governing the height h of
the ¯uid in the column above its initial position is
dh=dt q
p=Ajp2rgh , where A is the cross-sectional area
of the input and output columns, r the density of water, and
q(p) the volume ¯ow rate of the pump as a function of head
pressure. The factor of two is due to the fact that ¯uid
pumped into the output column is removed from the input
column, causing the head pressure to be twice the height
change of either column. Assuming a linear relation between
q, and p, that is q
p q0
1 p=ps , the differential equation becomes
dh q0 2rgh
; h
0 0;
1
dt
ps
A
with solution
ps 1
h
t
2rg
exp
t ;
t
(1)
where t Aps =2q0 rg is the characteristic time required for
the pump to reach 63% of the static head. Solution
parameters are the static head ps and the zero-load ¯ow
rate q0.
We ®t an exponential of form (1) to the h(t) data by linear
least-squares analysis and obtain estimates of ps and q0 from
the ®t results using known values of A, r, and g. Fig. 3 shows
h(t) versus t data for the three sequences. Table 2 gives the
resulting estimates of ps and q0. Correlation coef®cients, R2,
ranged from 0.998 to 1 indicating that the ®t is excellent.
Furthermore, the agreement with data indicates that the
assumptions made in deriving (1) are well founded. The
0.1 ml/s pump rate is appropriate for micro-reactors [18],
and is further adjustable by modifying the pump chamber
size. The values of h shown in the graph are small. The
absolute pump performance depends on several factors such
as gas pressure, PDMS layer thickness, and the relative
J.M. Berg et al. / Sensors and Actuators A 104 (2003) 6±10
9
Fig. 3. Pump height on absolute and displacement scales vs. time for the three pumping sequences used. For each pump several data runs are shown, with the
same symbols, showing excellent repeatability. Measurement uncertainties are <1 s for time and 0.5 mm for height. Curves are fits to the data using the
model described in the text.
diameters of the air blister and pump chamber. While shortterm testing was found to be highly repeatable, as presented
here, performance gradually degrades with hours of operation. The current experiments were performed on a pump
with over 50 h of continuous service. Fresh pumps deliver as
much as h 15 cm, that is 30 cm of water static head
pressure.
Predicted ¯ow rate ratios are based on Table 1 and are
compared with experimental results in Table 2; absolute
values of the predicted ¯ow rates may be computed, based
on the pump-chamber volume of 1.17 ml and the actuation
time of 0.5 s, to be V=T 2:32 ml/s. The measured q0
ranges from 1/4 to 1/7 of the modeled value. The two-stage
pump produces 2/3 the static head pressure of the threestage pump. Preliminary studies shows the pump performance, i.e. parameters ps and q0, depends strongly on the
initial column height: elevated absolute gauge pressures
Table 2
Experimental static head pressures and flow rates
Sequence
ps (Pa)
q0 (ml/s)
q0 relative to
three-stage
(measured/modeled)
Three-stage
Truncated three-stage
Two-stage
227 3
181 2
166 2
0.117 0.004
0.098 0.004
0.107 0.004
1/1
0.81/0.5
0.94/0.75
The final column shows flow rates, both measured and predicted, relative
to the three-stage benchmark pump.
require higher air-bladder pressure to fully express the
chamber volume and also promotes seepage through the
pump. Consequently, a complete model must include the
effects of total pressure, which we have neglected. We also
neglected in this analysis other factors which contribute to
incomplete chamber collapse and non-symmetric egress.
These are ¯uid ¯ow resistance, which is expected to be
high through sub-millimeter ¯uid channels, and pressure
losses across the air-bladder connections. For example, note
that in the truncated three-chamber pump sequence shown in
Fig. 2b, when Chamber 1 is collapsed and Chamber 2 is
simultaneously expanded, only half the ¯uid required to ®ll
Chamber 2 is assumed to come from Chamber 1. The rest is
assumed to come from sources downstream of the pump,
reducing the net ¯ow rate. In reality, since the chambers are
in close proximity and the ¯ow resistance between them is
likely to be low compared to the downstream ¯ow resistance,
most of the ¯ow from Chamber 1 will likely end up in
Chamber 2. Thus the actual performance with respect to the
three-stage sequence may be better than predicted. More
detailed experimental results and analysis will be presented
in a future publication. However, pending the incorporation
of these effects, we ®nd the current simple model to be of
great utility in evaluating the relative performance of peristaltic micropump designs.
We conclude from these measurements that the two-stage
pump is a viable design option. The relevance of this result is
particularly noted in the comparison between our two-stage
10
J.M. Berg et al. / Sensors and Actuators A 104 (2003) 6±10
micropump and the accepted three-stage device. The ps and
q0 values are comparable for these two micropumps, leading
us to conclude that this design results in a small performance
compromise when total device area is at a premium.
Acknowledgements
The authors gratefully acknowledge support for this work
from the NSF Contracts CTS-0088198 and ECS-0087902,
and U.S. Army SBCCOM.
References
[1] S. Quake, A. Scherer, From micro- to nanofabrication with soft
materials, Science 290 (2000) 1536±1540.
[2] Y. Bar-Cohen, Z. Chang, Piezoelectrically actuated miniature peristaltic
pump, in: C.S. Lynch (Ed.), Proc. SPIE, Smart Structures and
Materials: Behavior and Mechanics, 2000, vol. 3992, pp. 669±676.
[3] F.T. Hartley, Micropump technology and applications, in: Conference on Electronics and Structures for MEMS, 1999, Proc. SPIE,
vol. 3891, pp. 403±409.
[4] N.-M. Nguyen, X. Huang, Miniature valveless pumps based on printed
circuit board technique, Sens. Actuators A 88 (2001) 104±111.
[5] M. Okandan, P. Galambos, S. Mani, J. Jakubczak, Development of
surface micromachining technologies for microfluidics and bioMEMS, in: C.H. Mastrangelo, H. Becker (Eds.), Proc. SPIE,
Microfluidics and BioMEMS, 2000, vol. 4560, pp. 133±139.
[6] N. Schwesinger, S. Bechtel, Micropump for viscous liquids and
muds, in: Proceedings of the SPIE Conference on Microfluidic
Devices and Systems, Santa Clara, CA, 1998, vol. 3515, pp. 40±45.
[7] M. Unger, H. Chou, T. Thorsen, A. Scherer, S. Quake, Monolithic
microfabricated valves and pumps by multilayer soft lithography,
Science 288 (2000) 113±116.
[8] G.T.A. Kovacs, Micromachined Transducers Sourcebook, WCB/
McGraw-Hill, New York, 1998.
[9] E. Esashi, S. Shoji, A. Nakano, Normally close microvalve and
micropump fabricated on a silicon wafer, in: Proceedings of the IEEE
Micro Electro Mechanical Systems Conference, Salt Lake City, UT,
20±22 February, 1989, pp. 29±34.
[10] F.C.M. Van de Pol, H.T.G. van Lintel, M. Elwenspoek, J.H.J.
Fluitman, Transducers '89, A thermopneumatic micropump based on
micro-engineering techniques, in: Proceedings of the 5th International Conference on Solid-State Sensors and Actuators and
Eurosensors III, vol. 2, Montreux, Switzerland, 1990, pp. 198±202.
[11] E. Stemme, G. Stemme, A. Valveless, Diffuser/nozzle-based fluid
pump, Sens. Actuators A 39 (1993) 159±167.
[12] C. Tamanaha, L. Whitman, R. Colton, Hybrid macro±micro fluidics
system for a chip-based biosensor, J. Micromech. Microeng. 12
(2002) N7±N17.
[13] M. Khoo, C. Liu, A novel micromachined magnetic membrane
microfluidic pump, in: Proceedings of the 22nd Annual EMBS
International Conference, July 23±28, Chicago, IL, 2000, pp. 2394±
2397.
[14] F.K. Forster, R.L. Bardell, M.A. Afromowitz, N.R. Sharma, A.
Blanchard, Design fabrication and testing of fixed-valve micropumps, in: Proceedings of the ASME Fluids Engineering Division,
(FED), IMECE, 1995, vol. 234, pp. 39±44.
[15] L.-S. Jang, N.R. Sharma, F.K. Forster, The effect of particles on
performance of fixed-valve micropumps, in: A. van den Berg, et al.
(Eds.), Proceedings of Micro Total Analysis System, Kluwer
Academic Publishers, Dordrecht, Enschede, The Netherlands, 2000,
pp. 283±286.
[16] C. Grosjean, X. Yang, Y.C. Tai, A thermopneumatic microfluidic
system, in: Technical Digest of the Fifteenth IEEE International
Conference on Micro Electro Mechanical Systems (MEMS'02), Las
Vegas, USA, 2002, pp. 24±27.
[17] C. Grosjean, Y.-C. Tai, A thermopneumatic peristaltic micropump,
in: Proceedings of International Conference on Solid-State Sensors
and Actuators (Transducers'99), Sendai, Japan, 1999.
[18] P.K. Dasgupta, K. Surowiec, J. Berg, Flow of multiple fluids in a
small dimension, Anal. Chem. 74 (7) (2002) 208A±213A.