Mesofluidic Magnetohydrodynamic Power Generation
by
Jay J. Fucetola
ARCHIVES
S.B. Mathematics
Massachusetts Institute of Technology, 2002
OF TECHNOLOGY
S.B. Electrical Engineering and Computer Science
JUN 2 8 2012
Massachusetts Institute of Technology, 2003
LIBRARIES
S.B. Management Science
Massachusetts Institute of Technology, 2003
SUBMITTED TO THE DEPARTMENT OF MECHANICAL ENGINEERING IN PARTIAL
FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE IN MECHANICAL ENGINEERING
AT THE
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
JUNE 2012
© 2012 Massachusetts Institute of Technology. All rights reserved.
Signature of Author:
d
In
Department of Mechanical Engineering
May 8, 2012
Certified by:
Todd Thorsen
Lincoln Labs - Technical Staff
Thesis Supervisor
Accepted by:
'VP
Professor David E. Hardt
Ralph E. & Eloise F. Cross Professor of Mechanical Engineering
Graduate Officer
Mesofluidic Magnetohydrodynamic Power Generation
by
Jay J. Fucetola
Submitted to the Department of Mechanical Engineering
on May 8, 2012 in partial fulfillment of the
requirements for the degree of Master of Science in
Mechanical Engineering
ABSTRACT
Much of the previous research into magnetohydrodynamics has involved large-scale systems.
This thesis explores the miniaturization and use of devices to convert the power dissipated within
an expanding gas flow into electricity. Specific properties, such as high surface tension, allow for
unique possibilities in the design of such devices. The material covered includes a brief derivation of the theory describing steady well-developed MHD flows within circular and rectangular
channels. Numerical simulations are used to elucidate the relationships derived theoretically and
to enable future design without the reliance upon such simulation. Fabricated devices are experimentally observed to determine the agreement with the modeled behavior. Finally, a design is
proposed that is predicted to be a viable generator as well as a means for further examining the
unanswered questions raised by the research performed in this thesis.
Thesis Supervisor: Todd Thorsen
Title: Lincoln Labs - Technical Staff
3
4
Acknowledgments
I have great appreciation for the many people without whom this thesis would never have been
made possible. I would like to thank Dr. Todd Thorsen for his guidance, patience and strong
intuition in the field. I would also like to thank Corey Fucetola and Dr. Steven Samouhos for
their creativity, collaboration and experimental knowledge. I owe everything to my parents. I am
grateful for the academic excitement and persistence of my father, Joe Fucetola, along with his
substantial involvement in the experimentation, review and organization of this project.
Others I respect greatly and to whom I am indebted for their teachings and guidance (both
directly and indirectly) include Profs. Albert Meyer, Ronald Probstein, Gareth McKinley, David
Hardt and Edwin Thomas. I would also like to thank Dr. Mark Schattenburg, Kurt Keville, Lisa
Shaler-Clark and Steven Kooi for help finding resources and contacts that enabled the completion
of this research.
5
6
Contents
1
Introduction
21
2
Steady Well-Developed MHD Model
25
2.1
2.2
3
. 26
Governing Equations ...................
2.1.1
The Induction Equation ...............
. . . . . . . . . . . . . . . . 26
2.1.2
The Modified Navier-Stokes Equation .....
. . . . . . . . . . . . . . . . 27
2.1.3
Dimensionless Forms
2.1.4
Steady Pipe Flow .................
2.1.5
Boundary Conditions
. . . . . . . . . . . . . . . . 27
..............
. . . . . . . . . . . . . . . . 30
. . . . . . . . . . . . . . . . 33
..............
Electrical Characterization of Rectangular Channels .
. . . . . . . . . . . . . . . . 34
2.2.1
Derived Macroscopic Properties ........
. . . . . . . . . . . . . . . . 34
2.2.2
The Current-Voltage Characteristic .......
. . . . . . . . . . . . . . . . 37
2.2.3
Pressure and Velocity Dependence . . . . . . .
. . . . . . . . . . . . . . . . 40
2.2.4
Estimation of Macroscopic Properties . . . . .
. . . . . . . . . . . . . . . . 41
2.2.5
Experimentation and Systems Design . . . . .
. . . . . . . . . . . . . . . . 44
. . .
. . . . . . . . . . . . . . . . 46
2.3
Electrical Characterization of Circular Channels
2.4
Implications for Generator Design .............
. . . . . . . . . . . . . . . . 48
51
Numerical Simulation
3.1
Solution M ethodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2
Characteristic Variable Scalings .....................................
52
3.3
The Nonuniform Mesh ....................................
52
7
4
3.4
Numerical Observations ..................................
53
3.5
A Concrete Example .......
56
3.6
Conclusions from Numerical Simulations .............................
60
Unsteady Two-Region Slug Flow
61
4.1
65
4.2
Model Development
...........
4.1.1
The Nitrogen Supply Reservoir .
66
4.1.2
Nitrogen Inlet Restriction
69
4.1.3
Isothermal Nitrogen Volume
70
4.1.4
Gas Flow Near the Slug.....
71
4.1.5
A Uniform Liquid Metal Velocity Profile
74
4.1.6
Inertial Forces ...........
76
.
Returning to Justify the Assumptions
4.2.1
5
....................................
Decoupling RO
.
77
..........
78
Experimental Results
5.1
79
Devices and Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . ..
. . . . . 82
5.1.1
The M agnetic Circuit . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 82
5.1.2
Flow Rate Regulation and Measurement
. . . . . . . . . . . . .
83
5.1.3
Fluid Component Separation . . . . . . . . . . . . . . . . . . . .
. . . . . 85
5.1.4
Electronic Position Sensing at the Inlet Junction
. . . . . 87
. . . . . . . . .
5.2
Voltage Measurements and Noise ..........................
5.3
Single Slugs Without Magnetic Fields ......................
. . . . . 90
5.4
The Effect of Load Resistance for a Circular Channel . . . . . . . . . . .
. . . . . 96
5.4.1
Experimental Setup . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 97
5.4.2
Correlation of Simulation with Experimental Results
. . . . . 98
5.5
89
. . . . . .
Voltage Versus Velocity for a Square Channel ..................
. . . . . 102
5.5.1
Predictions from the IV-Characteristic ..................
. . . . . 108
5.5.2
Open Circuit Velocity and Voltage: Prediction vs. Observation .
8
109
5.6
6
Following the Velocity of a Single Slug
5.5.4
Markers Describing Slug Behavior . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.5.5
Narrowing the Space of Possible Trajectories . . . . . . . . . . . . . . . . . . . 1 13
5.5.6
Velocity Estimates Derived on the Back of a Napkin . . . . . . . . . . . . . . . 117
5.5.7
A Comprehensive Model
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 19
Experimental Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
137
Gravity-Driven Flow
6.1
. . . . . . . . . . . . . . 139
Model Specifics ...............................
6.1.1
The Side Containing Mainly Liquid Metal .......
. . . . . . . . . . . . . . 140
6.1.2
Slug Formation ......................
. . . . . . . . . . . . . . 142
6.2
Magnetohydrodynamic Behavior ................
. . . . . . . . . . . . . . 14 7
6.3
Gas Dynamics ................................
. . . . . . . . . . . . . . 14 8
6.4
Numerical Values .........................
. . . . . . . . . . . . . . 15 0
6.4.1
6.5
7
. . . . . . . . . . . . . . . . . . . . . . 111
5.5.3
Operating Point of the Miniature Generator ......
Empirical Steady Flow Realization ...............
. . . . . . . . . . . . . . 153
. . . . . . . . . . . . . . 15 3
155
Conclusion
9
10
List of Figures
2.1
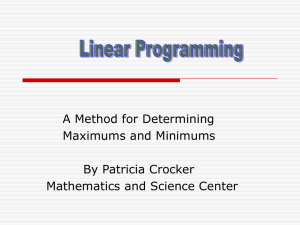
Well-developed flow in the J direction through a straight channel with arbitrarybut constant cross-section and an externally imposed uniform magneticfield in the 9 direction. . . . 31
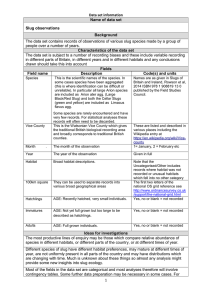
2.2
The standardgeometry for extracting electricity from a high-conductivity magnetohydrodynamicflow. The imposed magneticfield Bo is normal to the insulating Hartmannwalls
whereas the fluid velocity u and inducedfield b are both in the axial direction J. . . . . . . . 35
2.3
Plots of b(y/H, 0)/(pIo/L) versus y/Hfor (a) Ha = 5 and (b) Ha = 50. In each case
numerical solutions are shown for boundary conditions correspondingto I = 0, I = Isc
and I = Io . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
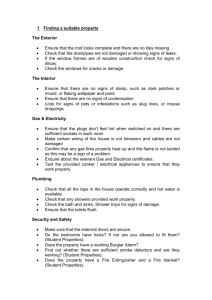
2.4 A plot of the maximum efficiency for Hg and GaInSn as a function of the side length of a
square channel and the imposed magneticfield. . . . . . . . . . . . . . . . . . . . . . . . . 43
2.5
The circulargeometryfor magnetohydrodynamicpower conversion is similar to the rectangular geometry in figure 2.2. The imposed magneticfield remains uniformly Bo p; the the
fluid velocity u(r, 9) and inducedfield b(r, 0) are both in the axial direction &. . . . . . . . . 46
3.1
Plots of numerical solutionsfor the induced magneticfield and velocity profiles usingfinite
differences benefit from nonuniform grid spacing and high order derivatives (c and d) due
to signficant gradients near the Hartmann walls. In each case, Ny = 25 and Nz = 29.
. . 54
3.2 Numerical results demonstrating the expected relationshipbetween velocity and currentfor
rectangularchannels. Correspondingresultsfor circular channels are not given here but
have likewise agreed with predicted values with similaraccuracyfor the various configurations that were simulated . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
11
3.3
Plots of the numerically derived velocity profiles, scaled by U0e,for various operatingpoints:
(a) I = 0,(b) I = I*,(c) I = Ise,and (d) I = Io. . . . . . . . . . . . . . . . . . . . . . . . 57
3.4
Plots of the numerically derived induced magneticfield profiles, scaled by pIo /L, for various operatingpoints: (a) I = 0, (b) I = I*, (c) I = I,, and (d) I = Io.
3.5
Vector field plots of Jfor various operatingpoints: (a) I = 0, (b) I = I*, (c) I = I, and
(d) I
=
Io. The shaded scale bar and shading in the vector plots correspond to the relative
vector magnitudes within a each plot, scaled to the range [0,1].
4.1
. . . . . . . . . . 58
. . . . . . . . . . . . . . . 59
A 1.2 mm diameter circularchannel was constructedout of polycarbonate to allow observation of slug trajectories. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.2
This image was taken of a slug moving down a channel having identical cross-section as the
channel depicted in figure 4.1 but a different axial electrode length. This channel is used in
section 5.4 to observe voltage profiles of individualslugs as the load impedance is varied. . . 64
4.3 Region RO is the stationary control volume between the valve at the outlet of the supply
reservoirand the nitrogenflow restriction(the throat), region R1 is the time-varying volume
of nitrogen between the restriction and the trailingedge of the slug, and region R2 describes
the conditions at the outlet. The mean velocity of the slug is USI and the gas mass flow rate
between successive stations is rm _ . Ultimately all three regions will be approximated as
isothermally existing at room temperatureT = Ta due to the time/length scales involved.
65
4.4 The air supply reservoir used in all experiments to ensure a known/stable thermodynamic
state at the input. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.5 A block diagram of the supply, valve and flow restriction that allowed precise control over
the pressure preceding the slugs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.6 Adiabatic compressionfollowed by isobariccooling. . . . . . . . . . . . . . . . . . . . . . . 68
4.7 A diagram of the unsealed air restriction housing shows the seating of the polycarbonate
film containing the ablated orifice. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.8 A diagramdescribing the geometry of the two-region annularflow model. . . . . . . . . . . 72
12
5.1
(a) In the open-loop configuration,a mercury slug was preloaded into the channel. A valve
was then opened to allow pressurized nitrogen to propel the slug into a collection vessel at
atmospheric conditions. This method was used to examine the behavior of a small number
of slugs either with or without an imposed magnetic field present. (b) In the closed-loop
configuration the nitrogen and mercury were separatedat the outlet of the channel (existing
at atmospheric conditions) and the mercury was fed back around to the inlet of the channel,
with the aid of two check valves, in a manner reminiscent of a reciprocating engine. A
common feature of the closed-loop experiments was that voltage measurement were always
taken from the flow passing through magnetized section of the channel. The closed-loop
experiments provided aggregated measurements of slugflows that were often very periodic,
allowing us to analyze the effect that changing a single parameterhad on the system. . . . . 81
5.2
This magnetic circuit was constructed out of supermendur and NdFeB magnets. The field
lines were compressed to the point of saturation through the decreasing area between the
magnets and the gap in the center. Since the material on either side of the gap was at
saturation, the field lines were uniform and parallel across the gap and outside the magnetic
fieldfell off quickly. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.3 Measuring volumetric flow rate at atmospheric conditions via water displacement to avoid
introducing significantback pressure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.4
The device used to separate the nitrogenfrom the liquid metal is shown in (a) along with a
cut-away view in (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.5
Voltage traces of a quasi-periodicslug flow and the correlatedbeatingat the outlet suggests
a strong relationship between the flow into the separationregion and the dynamics of slug
form ation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.6
The junction where nitrogen was introduced into a column of mercury was monitoredfor
times when the liquid metal closed the connection between one of the four syringe needle
hubs and the common electrode at the center of the junction. . . . . . . . . . . . . . . . . . 87
5.7
The various situationsthat could occur within the inlet junction along with the conceptual
idea behindjunction signal multiplexing. . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
13
5.8
This circularpolycarbonatechannel allowed direct observation of slug trajectories. . . . . . 90
5.9
The annularflow model provided a good datafit for long slugs at moderate liquid metal
Reynolds numbers. Applying the model required that the lubrication approximation held
and that the flow could be considered incompressible. The resulting trajectory confirmed
that the Reynolds and Mach numbers for the nitrogen were much less than unity. Note the
strictly positive gauge pressure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.10 Increasingthe pressure led to aflow with a much higher Reynolds number. The priorsof the
annularflow model were satisfied and the model provided a good fit to the data. . . . . . . . 93
5.11 A shorter slug under identical conditions to those in 5.10 showed that the model could still
provide significant insight even when the Reynolds number of the liquid metal became quite
large. The substantialWeber number suggests that the balance between surface tension and
inertialforces is not itselfsufficient to predict slug breakup. . . . . . . . . . . . . . . . . . . 94
5.12 The inlet CSA was reduced along with the pressure drop. A short slug with a Reynolds
number well below those in figures 5.10 and 5.11 exhibited behavior that could not be accounted for by the annular slug model. The best fit resulted in a nitrogen flow with a
Reynolds number that was no longer insignficant,violating the priors of the annularflow
model. The oscillations also violated assumptions of section 4.1.2 . . . . . . . . . . . . . . . 95
5.13 The electrodes of this 3/64 in diameter circularchannel come into contact with the channel
for only 1/16 in along the axial direction. . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.14 A cross-section of the channel between the electrodes. The channel has diameter Dh
3/64 in and the electrodes had a height of he
±Oe
=
=
1/32 in that resulted in an angularextent of
= 41.80 on either side (off of the horizontal axis) where the channel wall was conductive. 96
5.15 A diagram of the circularchannel that was used to explore the effects that varying the load
resistancehad on the electricalcharacteristicsof the device. The thick electrode clamps were
designed to minimize unmeasured resistances. . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.16 A collection of tracesfor Re = 100.0 mQ. (N = 4) . . . . . . . . . . . . . . . . . . . . . . 99
5.17 A collection of tracesfor Re = 5.0 mQ. (N = 5) . . . . . . . . . . . . . . . . . . . . . . . 99
5.18 A collection of tracesfor Re = 3.3 mf2. (N = 3) . . . . . . . . . . . . . . . . . . . . . . . 100
14
5.19 The semilog-scale box-plot describing the experimentally derived peak voltage distribution
for various load resistances agrees convincingly with the theoretical IV-characteristicpredictions of the well-developed flow model presented in chapter 2. . . . . . . . . . . . . . . . 101
5.20 The placement of the channel within the magnetized region is shown here without the upper portion of the magnetic circuit. The cross-section was square with an edge length of
1.5875 mm. The electrodes extended for 12.7 mm in the axial direction. The circular potion of the channel on either side consisted of machined polycarbonate channels, syringe
needle hubs and tubing. The section upstream of the square channel had an average CSA
of 1.221 mm 2 and the section downstream an average CSA of 1.255 mm 2 . The CSA of
the square channel was 2.520 mm 2 and so conservation implies that eitherflow separation
must have occurredfollowing the abrupt area change or the liquid metal must have slowed
down by a factor of two as the slugs entered the square region. . . . . . . . . . . . . . . . . 102
5.21 The picture of the closed-loop configuration corresponds directly to the block diagram in
figure 5.1b. The pressure vessel (a.k.a. the "expansion tank") is just visible in the upper
right (a diagram is provided in figure 5.34). It was connected through a 508 mm tube to
the T-junction which included the check valves used to enforce forwardflow (defined in the
counterclockwise direction). The tube connecting the separator to the T-junction and the
tube connecting the T-junction to the inlet junction were each 127 mm long. These lengths
include all stainless steel syringe ports and the distancesfrom the center of the T-junction
to the check valve on either side. The CSA of the tubing was 1.267 mm 2 . Not pictured
here, the air restriction was connected by a 381 mm long tube connected to the center of
the inlet junction. This created a 0.4286 mL volume in which nitrogen could expand and
contract. The channel lengthfrom the center of the inlet junction to the upstream edge of the
MHD terminals was 151 mm and had an average CSA of 1.221 mm 2 . The distancefrom
the downstream edge of the terminals to the separatorwas 76.2 mm with an average CSA of
1.255 mm 2 . These exact dimensions were usedfor the analyses thatfollow in the remainder
of this chapter. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5.22 A trace of the open-circuitvoltage as a train of slugs passed between the electrodes. . . . . . 105
15
5.23 A histogramof the averagevoltage generated by each slug, taken over 42 seconds. . . . . . . 105
5.24 The integrated terminal voltage, scaled and shifted arbitrarilyto overlay figure 5.22, provided clear data on the start/finishof each individual slug's trace. . . . . . . . . . . . . . . . 106
5.25 The multiplexed switch data is included, arbitrarilyscaled and shifted to overlay with Vt(t). 106
5.26 The histogram of the time delays between slugs entering the junction and contacting the
electrodes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.27 The voltage trace of a single slug is shown along with its integral (to filter out AC noise)
and the switch data taken as the slug began to traverse the channel. The terminal voltage is
plotted to scale with the labels of the vertical axis whereas the integrated signal and switch
data are scaled/shifted by arbitraryamounts. Markers are placed at various times where
identifiable events occurred. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .111
5.28 Figure5.27 exhibits three nonzero combinations of multiplexed switch values. The encoding
for the binary switch values [Sii is AE Si/ 2 ' where A is some arbitraryvoltage scale.
Si = 1 indicatesan inflow of Hgfrom the pressure vessel and Ss
=
1 indicates an outflow
of Hgfrom the junction into the channel. . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.29 The displaced volume of nitrogen over the 180 second window taken during the experiment
was highly linear in time, correspondingto a flow rate of 0.7563 mL/s at atmospheric temperatureand pressure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.30 Fill curves for the pressure equalization across the throat that would occur when a slug
blocked the nitrogenflow between the inlet and the outlet. . . . . . . . . . . . . . . . . . . . 115
5.31 The distribution of slug velocities passing between the electrodesfrom an estimate based on
the initial velocity calculatedat the inlet junction. . . . . . . . . . . . . . . . . . . . . . . . 118
5.32 The distribution of slug velocities passing between the electrodesfrom an estimate that divides the distancefrom the inlet junction to the upstream edge of the electrodes by the time
taken to traverse this distance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.33 A detailed schematic extending the conceptual system diagram in figure 5.1 b to allow an
analysisof an observed quasi-periodicslug flow and resulting voltage trace. . . . . . . . . . 122
16
5.34 A diagram of the variable-volume expansion tank. Given the large CSA, the hydrostatic
pressure was well approximated as a constant bias to the pressure of the gas within the
volum e. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.35 Diagrams showing (a) the inlet/outlet state at the point where leading edge of the previous
slug first enters the separatorat t = to and (b) the inlet/outlet state after the trailingedge
enters the separator,the pressure in the channel drops and slug formation occurs. . . . . . . 126
5.36 A comparison of the predicted slug trajectoryand associated voltage traces along with the
measured voltages. The junction switch signals are scaled and shifted to make for an easier
comparison of the temporal events. The 2REGION model begins at tD.
. . . . . . . . . . . . 130
5.37 The pressures predicted by the numerical simulation. The marker ic indicates the time
where the inlet pressure and expansion tank pressure become equal during the slug's motion. 131
5.38 The predicted velocity profile with markers corresponding to the slug formation, the point
where the leading edge contacts the electrodes and the point where the leading edge enters
the separator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
5.39 A diagram of the abruptarea change as the slug first enters the square portion of the channel. 134
6.1
A miniature gravity-driven generator (5 cm tall) is shown next to an AAA battery and
an A27 battery (drawn to scale). The generator is comparable in size to the AAA and
comparable in power output to the A27 based on the calculationsthat follow. . . . . . . . . 138
6.2
The diagram shows a miniature generatordrawn to scale with pertinent locations used in
the model indicated by stations 0 through 5. . . . . . . . . . . . . . . . . . . . . . . . . . . 139
6.3
Electricalpower versus overall conversion efficiency for the miniature gravity-driven generatorshown in figure 6.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
6.4
The solution space for the miniaturegravity-driven generatorshown in figure 6.3 and the
resulting relationshipsbetween (1) the throat diameter Dn < 250 Pm, (2) the conversion
efficiency rtota, (3) the percentage < of the volume between 2 and 3 which is occupied
by mercury, (4) the ratio a = R /Rj of the load resistance to the efficiency-optimal load
resistance,and (5) the electricalpower Pec provided to the external circuit. . . . . . . . . . 152
17
18
List of Tables
1.1
Symbols used to represent various physical quantities. . . . . . . . . . . . . . . . . . . . . 24
3.1
Characteristicvalues for macroscopic properties. . . . . . . . . . . . . . . . . . . . . . . . .
5.1
The steady-state velocities imposed by each inlet restrictionon thefluidflows through either
52
a 3/64 in diameter circularchannel or through a square channel 1/16 in on a side. . . . . . . 84
5.2
Comparingresultsfrom the numerically derived IV-characteristicand correspondingexperimental data shows agreement to within ±0.5%. . . . . . . . . . . . . . . . . . . . . . . . 101
5.3 Assigned values of the unknown parametersused in the numerical simulation. . . . . . . . 128
5.4 A comparison of measured and predicted markers. All times have units of seconds. . . . . . 129
19
20
Chapter 1
Introduction
While the field of magnetohydrodynamics has been around for quite some time, many of the best
books on the subject were written in the 1960s with little competition in recent times. Metallurgical processes are often based on magnetohydrodynamic principles. Typical MHD energy applications make use of the thermal advantages of liquid metals and conductive plasmas at extremely
high temperatures. Nuclear power plants often implement magnetohydrodynamic systems that
have enabled efficiencies that far exceed what would be possible otherwise. [SA04] MHD generators have been explored as a method to allow high-efficiency sequestration of CO 2 in power
plants. [BR96] MHD space propulsion techniques with the potential to enable high velocity travel
have become a topic of recent interest. [AS10] Recent advances in the field have become enabling
technologies for primarily large scale systems.
Small scale magnetohydrodynamic power generation is unpopular for many reasons, including the toxicity of mercury and the substantial expense of gallium-indium-tin eutectic (GaInSn)
as a nontoxic alternative. Furthermore, as device sizes shrink the ability for MHD channels to
efficiently convert kinetic fluid energy into electricity decreases as viscous effects begin to dominate. Perhaps the most unappealing aspect of small-scale systems are the large currents and small
voltages that result from the extremely small internal channel resistances. Many of the traditional
solutions to overcome this issue are made much more difficult by miniaturization. Liquid metal
systems cannot take advantage of the Hall effect nor can the electrodes of small scale systems be
21
as easily placed in series so as to increase the voltage at the expense of decreased current.
There are also many advantages that miniature magnetohydrodynamic generators have over
their larger counterparts. The increasing dominance of surface tension with decreasing scale allows for easy separation of a gaseous working fluid from the liquid metal flow in a two-component
system. The enormous surface tension of of these liquids can also allow for a reduction of viscous losses through clever surface engineering. Advances in low-power electronics should enable
efficient techniques for converting the high-current/low-voltage output to a more useful form.
Miniature magnetohydrodynamic generators that run without non-fluidic moving parts will not
exhibit stiction and can thus be designed to operate under extremely small pressure differentials.
Many of the precision fabrication capabilities required for viable miniature MHD generators have
only recently becoming realistic.
The first step toward mesoscale MHD systems is to determine how easily their behavior can
be modeled and whether or not such models indicate the possibility of successful generators. To
this end we first formalize a number of models of both magnetohydrodynamic effects and high
Reynolds number two-component nitrogen/liquid metal slug flows. The models are examined
numerically and compared to experimental results. They certainly provide insight that correlates
with empirical data but do not satisfactorily validate the models. We conclude with a design for
a gravity driven system that will remove such uncertainty and may also represent a surprisingly
efficient and realistic MHD generator.
Device Types
There are two basic operational device categories considered in this thesis. The first occupies
the majority of the analysis and is the basis for all of the experimental results. It relies on check
valves to enforce a single direction of flow around a loop powered by the injection of nitrogen.
The advantage of devices such as these is that their operation is independent of the gravity vector's direction. The primary disadvantage is the difficulty to model the exceptionally complex
dynamics that result. Furthermore, check valves limit the operational lifetime.
The second class of devices relies on gravity and is introduced near the end as both a realistic
22
generator design and also a means to further investigate the models presented in the preceding
chapters. A high-level design process and corresponding analysis predicts it is possible to produce MHD-based devices of similar size to an AAA battery that could capture around 37% of the
PV-work of an expanding isothermal flow of nitrogen. While certainly unlikely, the results are
convincing enough to merit further consideration.
Notational Conventions
Most of the thesis is presented with dimensioned variables. Nondimensionalization does not
simplify the system sufficiently to merit the loss of intuition when moving away from volts and
amperes. Nondimensionalization does, however, allow for some approximations based on cited
results. The PDEs are initially presented in both dimensional and dimensionless forms. The numerical solvers also make use of the dimensionless forms to reduce floating-point errors. For
clarity, each dimensionless variable will be denoted with a tilde and its scale with an double open
bracket. That is, if a is some dimensional variable then i would represent a scaled by a characteristic value [a].
In fluid mechanics y usually denotes the dynamic viscosity. In electrodynamics it instead
represents the magnetic permeability. For the entire treatment presented herein, p will denote the
magnetic permeability whereas the dynamic viscosity will always be written as vp, the product of
the kinematic viscosity and density (apologies to the mechanical engineers). Similar symbols that
are shared across fields are resolved in tablel.1.
Working Fluids
Nitrogen, mercury and GaInSn are the only working fluids that are specifically referenced. Unless otherwise stated, fluids should be assumed to exist at room temperature and atmospheric
pressure. Mercury-nitrogen systems are examined experimentally due to the fast oxidation of
GaInSn and the fact that it wets nearly everything other than gallium oxide. Fortunately gallium
deposition is straightforward. Both fluids have extremely large surface tensions (Hg: 0.47 N/m;
23
Quantity
Symbol
SI/MKS Units
Pressure
Lowercase p
Pa (also PSI)
Power
Uppercase P
W
Conductivity
o-
Um
Surface tension
-y
N/m
Adiabatic index
k
dimensionless
Table 1.1: Symbols used to represent various physical quantities.
GaInSn: 0.72 N/m). Mercury has a very high density (13546 kg/m 3 ) and low kinematic viscosity
(0.1148E-6 M 2 / s). GaInSn has a lower density (6363.2 kg/m 3 ) and higher viscosity (0.34809E-6 M 2 / s).
The fact that the dynamic viscosity of Hg is 70% that of GaInSn suggests mercury should outperform the Gallium eutectic. The conductivity 3.30737E6 Uim of GaInSn is roughly three times
the conductivity 1.04452E6 ?m of mercury and, as a result, the nontoxic GaInSn outperforms
mercury in the efficiency by which hydrodynamic power can be converted into electricity.
24
Chapter 2
Steady Well-Developed MHD Model
The goal of this chapter and the next are to derive and simulate a model of well-developed liquid
metal flows in pipes of cylindrical and rectangular geometries under moderately strong magnetic
fields. A steady well-developed flow model provides useful insight into the magnetohydrodynamics of the liquid metal flow in the context of power generation. The results are analytical
where possible and the gaps are filled with insight gained from numerical simulations.
The governing PDEs describing incompressible non-relativistic magnetohydrodynamic flows
are first presented in both dimensional and dimensionless form. We then apply the assumption
of steady parallel flow and the relevant boundary conditions for rectangular geometries to derive
analytical results. Both cylindrical and rectangular geometries are simulated numerically and
compared with experimentation. We conclude with a consideration of the implications that these
relationships have on the design of a meso- to micro-scale generator.
The main results are (1) a relationship between the pressure drop and the flow rate and its dependence on a load impedance across electrodes that extract power from the flow, (2) the currentvoltage characteristic as a function of velocity, (3) a quantification of the electrical power output
and its upper bound for a given pressure drop, and (4) optimal operating points maximizing
power or maximum conversion efficiency that depends only upon the channel design and intensive properties of the fluid.
25
2.1
Governing Equations
This section begins with a brief overview of the relevant MHD equations in the context of the
experiments in chapter 5 and the design presented in chapter 6. Wherever possible, simplifying assumptions are stated along with their posited justifications to reduce the complexity of the
system of coupled PDEs. In many cases these assumptions come from the observed behavior of
numerical simulation and shall be noted as such. For a more detailed derivation of the governing
equations with and without the assumptions made here, see [She65, HY66, Rob67, MB01].
2.1.1
The Induction Equation
In a fluid flow absent displacement currents with constant magnetic permeability p, the differential form of Ampere's law states that
VxB = pJ
(2.1)
where B is the magnetic field and J is the current density. By taking the divergence of both sides
it is immediately clear that V -J = 0. The electric field E in the moving fluid can be decomposed
into irrotational and solenoidal component vector fields (Helmholtz's theorem). The irrotational
component -V4 is just the gradient of the electrostatic potential, which is unaffected by the motion of the fluid. The solenoidal component V x E is given by the differential form of Faraday's
law
B
VxE =91
(2.2)
from which it can be seen that the magnetic field is solenoidal
V -B = 0.
(2.3)
The Hall effect and influence of displacement currents are inconsequential within a liquid metal
moving at relatively low velocity [MB01]. Ohm's law then states that
J = a (E + vxB),
26
(2.4)
where a is the electrical conductivity. Substituting J from (2.1) into (2.4) and taking the curl of
both sides,
Vx (VxB) = up (VxE + Vx (vxB)).
Then writing E in terms of B using (2.2) and applying vector calculus identities,
V (V . B) -2B
+ B - Vv - v - VB + v(V - B) - B (V -v).
= us
By (2.3) and the vanishing divergence of the velocity field under the assumption of incompressibility, we arrive at the induction equation for a liquid metal flow.
DB
_1
D -- 1V 2 B +B - Vv
Dt
up
(2.5)
The evolution of B is balanced by diffusion (V 2 B) and the warping of field lines (B - Vv).
2.1.2
The Modified Navier-Stokes Equation
For now we will ignore the effect of gravity as it is easily accounted for when considering the
directional derivative of pressure along the gravity vector. Current flowing orthogonally to a
magnetic field through a conductor generates a force normal to the differential plane formed by
J and B. The Lorentz body force FL = J x B is nonconservative. Including the Lorentz force in
the Navier-Stokes equation for an incompressible Newtonian fluid with constant viscosity and
substituting in for J using (2.1), the evolution of the velocity field is described by
Dv
Dtp
pDv =_-Vp+ pvv
2.1.3
2
1
+ -(VxB)
xB.
(2.6)
Dimensionless Forms
Nondimensionalizing the Navier-Stokes and Induction equations provides the usual benefits: intuition into the relevance of the various competing forces; a method for discarding negligible
terms to simplify the system of equations; and better results from numerical simulation, as discussed further in the next chapter.
27
In all flows considered there is a natural velocity scale U, length scale d and a characteristic
magnetic field Bo.
v=v-U
B = i3 -Bo
The Reynolds numbers for many of the flows we will consider are significantly larger than 2300.
While under most circumstances this would preclude the possibility of laminar flow, MHD effects
make such a model more realistic. The Lorentz force opposes velocity perturbations and can
effectively dampen turbulence to the point where laminar flow has been observed for Reynolds
numbers in excess of 20000 [She65, HL37]. The high Reynolds numbers suggest an inertial scaling
for pressure and a convective scaling for time.
p -j5 pU2
t = T dl
Dimensionless Induction and Navier-Stokes Equations
Rewriting equation (2.5) in terms of the dimensionless variables and simplifying, the nondimensionalized induction equation is
DB
1
Dt
Rrn
--
where Rm
=
-V2B+B
- VV
(2.7)
po-Ud is the magnetic Reynolds number 2 and describes the ratio of magnetic ad-
vection to magnetic diffusion. In all flows we consider Rm < 1 and so magnetic diffusion will
dominate the influence of the flow in determining the evolution of the magnetic field [MB01].
'Bo is the magnitude of the imposed (i.e. external) magnetic field.
2
The magnetic Reynolds number is often written in a form similar to the Reynolds number as Rm = &d/7 where
7 = 1/o-p is the magnetic diffusivity.
28
Similarly, the nondimensionalized Navier-Stokes equation is
=
+1'
Re
Dt
where N
N
R
A-
(2.8)
o-dB/pU is the interaction parameter 3 that describes the ratio of electromagnetic to
inertial forces.
Dimensionless Electric and Magnetic Fields
Thus far, choosing the appropriate variable scalings has been straightforward. The characteristic
values [J] and [E] for the current density and electric field are less obvious. Meaningful variable
scaling should (1) result in a consistent system and (2) provide predictive values for order-ofmagnitude analyses. We first choose values for [J] and [E] with only a cursory justification and
provide the resulting dimensionless forms for Ohm and Amperes' laws. The chosen scalings will
be shown to demonstrate the required consistency whereas the predictive merit is insufficient to
prevent our needing to perform numerical simulations.
Substantial generation of electrical power would suggest that the Lorentz force contributes
significantly to the overall pressure gradient and must therefore be of similar magnitude.
d
= [p] = JJxB]J = Bo [J)
In the absence of an external path for current to flow the net current across the channel must be
zero, in which case Ohm's law requires a balance between E and v x B. Therefore,
~
pu2
3= J -~
E=EJ Bod
EE -UBo
3
N is also known as the Stuart number.
29
and the dimensionless forms of Ampere's and Ohm's are
5xB!5
(2.9)
J = N (t5+~rxi5).
(2.10)
Illustrating the self-consistency of the chosen system of variable scalings is straightforward:
since kinetic energy will be converted into electricity we expect that the electrical power should
have the same scale as the hydrodynamic power.
[Peiecl = VIl]
2.1.4
[V]
=
d2 [JJ -d [E
-
pU 3 d2
-
pU2 -Ud
=
(zp! - [Q
2
= (Phydrol
Steady Pipe Flow
Consider the case of a steady well-developed laminar flow in a straight channel of arbitrary but
constant cross section under the influence of a constant uniform imposed magnetic field BO y
orthogonal to the axis of the pipe as in figure 2.1. In such a situation all variables are independent
of time so that the DB/Dt term in the induction equation (2.5) and the Dv/Dt term in NavierStokes (2.6) vanish. The velocity and magnetic fields are both independent of x. The y- and zcomponents vanish allowing the velocity to be written as v = u(y, z) x. From Ampere's law (2.1),
J
1
BBz
yt
dy
9BY
z /
-
p&z
I
iz 1c9Bx
1 &B,
Jz-
.
30
u(y,z)
B0$A
X
Figure 2.1: Well-developed flow in the l direction through a straightchannel with arbitrarybut constant
direction.
cross-section and an externally imposed uniform magneticfield in the 9O
and it is clear that BJ/8x = 0. Since B, J and v are all independent of x, Ohm's law (2.4) implies
oE/8x = 0. Expanding the induction equation and continuity equation for the magnetic field it
is not difficult to show that 0Bz/0y - By/&z (and consequently Jx) must be constant. In any
of the flows we consider there can be no net current along the axis of the pipe and thus Jx will
be identically zero everywhere. Ohm's law requires that Ex be zero as well. Furthermore, B is
solenoidal and in combination with Jx = 0 a system of equations results that is similar to those
encountered in potential flow theory.
aBY + aBz
=
49z
0
By
(2.11a)
0B
B" = 0
By
z
(2.11b)
31
We define a magnetic "stream function" V)and "potential"
# such that
By Bz~ W z ~ o y .q
_
Since @and
of s
=
# satisfy the Cauchy-Riemann
azs
Y
conditions [KC08],
$±i4
+
is a holomorphic function
y + iz and is thus analytic. By the linearity of the system (2.11), any such ((s) represents
a unique solution for a given set of boundary conditions, and from which By = R{8(/8s} and
B2
=
-Q{f(/8s}
are immediately known.
In all flows we consider the magnetic Reynolds number is on the order of Rm~ 1E-2 and to
a reasonable approximation the magnetic field outside the channel is uniformly Bo y [MB01]. For
an infinitesimally thin control volume bisected by the channel wall, V - B = 0 implies continuity
of the normal component of B across the boundary: (B - BO y). fi = 0. This boundary condition
is satisfied trivially for (
=
BO s and so By = BO, Bz
=
0 is the unique solution to (2.11). Since the
magnetic field is independent of x in a steady well-developed flow, Bx is composed entirely of the
induced magnetic field which we will denote b(y, z).
B =b i + Bo y
1 o8b _
J
1 iob -~
z
Pay
=y
-
ioZ
E =
Substituting v
y
-
=
u
+ Bou
9
(2.12a)
= bkR
+
(2.12b)
-
(2.12c)
N 83b
zy
RmOz
1
RmO
(2.12d)
N 8b
z
Rm9W
b
(2.12e)
+u
(2.12f)
Ji(ma
and B = b i + Bo y into the induction and Navier-Stokes equations, the
resulting system of coupled elliptic PDEs that will form the basis for this model is
1 (8 2 b
op
B y2
_2bN
+9y2±&a2)
+ Boz2y
=0
Op
(& 2u
02u N
Bo b
-9=Pu
+ a2 + 0
y
B y2 + 5z-2
Bz ,
32
(2.13a)
(2.13b)
The preceding dimensionless forms are provided above to help motivate some of the subsequent discussion regarding the associated dimensionless parameters. The relationships can be
carried through to find dimensionless forms for current/voltage/etc. At some point one must
decide exactly what velocity scale to use. The scaling that makes the most sense in this chapter
does not result in a clear analysis of the gravity-driven generator in chapter 6. Furthermore, dimensionless forms for current/voltage/etc. took away some of the intuition (in my opinion) from
the analysis without sufficiently reducing the degrees of freedom to merit more consideration.
There are certainly benefits of nondimensionalizing before performing numerical simulations
(e.g. reducing error in double-precision calculations) and the simulations themselves are carried
out under the dimensionless forms presented above, where the velocity and voltage scales were
chosen according to the open-circuit operating point and the current according to the zero-velocity
operating point (bounding values for the IV-characteristic that are discussed in section 2.2.2). Prior
to presenting the simulated outcomes, the numerical results are first converted back to the more
intuitive dimensioned quantities.
2.1.5
Boundary Conditions
In addition to the no-slip and impermeability boundary conditions imposed upon the velocity
field, the boundary conditions for the magnetic field are considered for the cases of channel walls
having (1) infinite and (2) zero conductivity. Let fi = ny y + nz
wall and let
=
y-
ny
be the the outward normal at the
be the corresponding unit tangent.
1. Since the potential is constant along an infinitely conducting channel wall, E = (E - n) n and
so Bb/oz
=
(-pE - fi) ny and ob/8y
=
-(o-E - i) nz-
Vb - nK wal0
=
0
2. No current can pass through a perfectly insulating channel wall.
V b^
=
33
p3 - f = 0
2.2
Electrical Characterization of Rectangular Channels
For the remainder of the current chapter and for chapter 3, conclusions made should be taken in
the context of the model. The accuracy of the model when applied to situations where the priors
are not met is the topic of the empirical analyses in chapter 5. Experimental results suggest a more
detailed analysis is required and an experimental generator is described in chapter 6 to more
accurately produce a flow in line with the following model. For a given liquid metal, channel
geometry, imposed external magnetic field and pressure drop, we wish characterize the resulting
flow as a function of an external load connecting the electrodes. Properties of interest include:
" the velocity and induced magnetic field profiles, u(y, z) and b(y, z);
" the relationships between various macroscopic quantities such as average velocity, electrical
power, and conversion efficiency;
e the system's dependence on the external circuit;
e specific operating points4 giving insight into the channel's power generating capability; and
" approximations/tabulations that decrease the reliance on lengthy numerical simulations.
2.2.1
Derived Macroscopic Properties
The system of equations (2.13) is applied to rectangular channels having length L, perfectly insulating Hartmann walls normal to
y and separated by a distance H, and perfectly conducting 5 side
walls (i.e. electrodes) normal to i and separated by a distance W (see figure 2.2). The boundary
conditions on the magnetic field for such a geometry are identical on all four sides of the channel:
Ob
Bz
ai= 0.
wal
4 The operating points correspond to particular properties of the external circuit connecting
the electrodes, be it a
constant current source or a resistor.
5
This approximation is justified by ratios ranging from 18 to 57 of the electrical conductivities at room temperature
of copper electrodes (with a 15 pm layer of nickel plating to prevent amalgamation) and either GaInSn eutectic or Hg.
34
BO
Conducting
Side Walls
(Electrodes)
W
Figure 2.2: The standard geometry for extracting electricity from a high-conductivity magnetohydrodynamicflow. The imposed magneticfield Bo is normal to the insulating Hartmann walls whereas the fluid
velocity u and inducedfield bare both in the axial direction X.
While in general there is no known analytical closed-form solution for u(y, z) and b(y, z) in this
standard geometry for high-conductivity MHD generators [HY66], theory augmented by simulation can provide considerable insight into power output, hydraulic resistance and conversion
efficiency.
The boundary conditions on all walls impose non-holonomic constraints in the z-direction and
thus the boundary conditions at the Hartmann walls are insufficient to uniquely define a solution:
all that can be said is that b is constant along each. Furthermore, since the boundary conditions
and differential equations depend only on derivatives of b, a DC bias in the induced magnetic field
can be neglected without wasting too much time justifying why no such bias would exist in the
first place. The values taken are directly related to the net current I across the channel: integrating
J - i over an arbitrary xy-plane that separates the electrodes at z
35
-
zo, the net current passing
through the plane is
/L/
I(zo)
H/2
=]
-2
dy dx
- H/2
2
=-L~j
-L
fH/2
L
L [b(H/2, zo) - b(-H/2, zo)].
P
=
The condition that Bb/Oz = 0 at y
abdy
d
±H/2 implies that 1(zo) = I for all zo (i.e. Kirchhoff's current
=
law). Neglecting any DC bias in b we arrive at a satisfactory boundary condition at the Hartmann
walls.
b(±H/2, z)
=
F
(2.14)
Current can only flow through an external circuit connecting the electrodes if a voltage drop
exists across the channel. The assumption of infinitely conductive electrodes implies that any path
integral of the tangential component of -E from the electrode at -W/2 to the electrode at W/2
must yield the same 6 terminal voltage V. Integrating -E - i from (2.12c) in z,
fW/2
(
1 9b
dz
=Bou+--
1
H
f-
H1/
2
/fw/2
_-H/2J -W/2
WB0U +
=
W 2
WB 0 U +
(Bou+
a
uiiOy}
a
1 _w/2
H/2
HWyU -W2
-H/2y
Hap
dzdy
dy dz
(b(H/2, z) - b(-H/2, z)),
where U is the mean velocity of the fluid in the channel. Applying (2.14), the IV-characteristic of
6
Under the assumption of a time-invariant magnetic field, V x E = 0 and so E can be expressed as the gradient of
a potential.
36
the channel with internal (resting) resistance Ri is therefore given in terms of U by
V= WBOU - IR,
=
Ri RH~HL
.
(2.15a)
(2.15b)
The voltage drop across the electrodes is composed of two parts: WBoU captures the the vxB
term in Ohm's law and IRi represents the voltage drop due to current through a resistor.
2.2.2
The Current-Voltage Characteristic
We assume that the channel experiences a constant pressure drop Ap over its axial length L. Later
this assumption is relaxed and Ap is treated as a dependent variable. The IV-characteristic of the
system is best described by examining a few specific points of interest on the IV-plane. The first
occurs when enough current flows through the channel to prevent any motion of the fluid. The
open circuit and short circuit operating points provide limits on V and I when the net power
provided to the external circuit is nonnegative. Finally we can consider the operating points of
maximum power output and conversion efficiency.
Zero Velocity
When the velocity field is identically zero the x-component of Navier-Stokes (2.13b) provides an
exact solution for the resulting induced magnetic field. In conjunction with (2.14) and (2.15a), the
zero-velocity current and voltage are
(-Ap)H
B0
V=o = -IoRi.
The electrical power IoVo is negative since a net influx of power is required to hold the fluid still
despite a nonzero pressure drop. Negative electrical power output is clearly more representative of a pump than a generator and the zero velocity operating point is primarily treated as a
37
theoretical construct for better describing the relevant portion of the IV-characteristic.
Dissipative External Circuits
Neither the open circuit voltage V, (occurring when I = 0) nor the short circuit current
'Sc
(oc-
curring when V = 0) are provided in closed-form. Equation (2.15a) leads to relationships between
Voc and the open circuit velocity and between I, and the short circuit velocity.
= WBo
(2.16)
UOc
=HLo-Bo
H
(2.17)
To allow us to move to cylindrical coordinates with less effort, the subsequent equations will be
kept in terms of V 0c/UOc despite the ratio having an analytical closed form under rectangular
geometries. In agreement with numerical simulation (see figure 3.4) and based on the linearity
of (2.13b), a straightforward argument can be made that the net Lorentz force is proportional to
the net current and consequently that U increases proportionally with Io - I. From (2.15a) it
follows that there is an affine relationship V = al + b between current and terminal voltage.
More concretely, finding another point on the IV-plane in addition to the analytically derived zero
velocity value for rectangular channels is sufficient to fully determine the IV-characteristic and
corresponding velocity. For the time being we assume that I.c is known and use (2.17) relating
current and velocity to determine the constant of proportionality between U and Io - I.
U
Uoc
_
Ic Rz
Vtoc i
Ia-0I
-Ise
Evaluating U for I = 0 and applying (2.16) would let us solve for Voc as a function of o. Since the
open circuit voltage is a far more useful empirical quantity, we will instead express Ioas a function
of Vtoc so that our formulation can proceed in terms of I, and Vtoc.
Vioc =
IseIoRi
Io - Isc
4=>.
38
I =
VCIsc
Vioc - Isc Ri
(2.18)
Substituting into (2.15a), the voltage and current satisfy the relationship
Vt = Vtoc (1 - I/Isc) .
Suppose a purely dissipative external circuit 7 connects the terminals through an impedance
0 < Re < oo. Then I = Vt/Re and the open/short circuit cases describe the limiting behavior as
Re becomes very large or small. Expressing the voltage, current and velocity in terms of Re,
=
__
Vtoc +
Vtoc
I
IscRe
(2.19a)
IscR
(2.19b)
Voc
_
+ Isc Re
Isc
Vtoc
U
U0e
Isc(Ri + Re)
Vtoc + IscR
(2.19c)
Optimal Operating Conditions
The hydrodynamic power of the flow is Phydro = (-Ap)UA and the electrical power dissipated
by the load is Pelec = IV. The conversion efficiency is q = Pelec/Phydro. Substituting in for Vt, I
and U from (2.19a-2.19c),
Phydro =
(-Ap)AUocIse( Ri + Re)
Pelec =
(Voc + IscRe)
2'cLscRf
(Voc + IscRe) 2
VtcIscRe
(-Ap)AUc(R, + Re) (Voc + IscRe'
Setting DPeiec/&Re = 0 and solving for Re yields the operating point of maximum output power
Ptc.
elec Setting B&/aRe = 0 yields the operating point of maximum conversion efficiency 7*. An
important conclusion is that the efficiency- and power-optimal operating points are distinct.
7
i.e. under which power is not added to the MHD flow but rather generated internally and dissipated by the external
circuit.
39
Maximized ElectricalPower
Rt =tQC
1
Pelec
Uit
=UOC
=
(2.20b)
t
2.2.3
I* = Isc-
(2.20d)
4
R + R
oc
(2.21a)
(2.21b)
Vt* = Vtoc -,
(2.20c)
2
P*cc
=
IscVtoc
R.
(2.21c)
R*+A
(RiR
(2.21d)
(Rj + Ri )2
(2.20e)
2 Rt
hydro =
Moc Ri
V
R* = V~
0 R
Isc
(2.20a)
Vt = -Vc
2
=
Maximized Conversion Efficiency
(2.21e)
R*
2R
IscVtoc
Rt
(-Ap)AUoc
2(Rt + Ri)
(2.20f)
(2.21f)
Phdro = (-zAp)AUoc -R
2
* _
(2.20g)
IscVtoc
(-Ap)AUe
_Ri+ i
(2.21g)
Pressure and Velocity Dependence
Without an imposed magnetic field we would expect the fluid velocity to increase proportionally
with -Ap/L.
Numerical results confirm the same is true in the presence of an external field. In
conjunction with the relationships (2.16) between Koc and UOc and (2.17) between Ic and Uc,
AL
L
(2.22a)
OC-Ap.
(2.22b)
Mtoc Oc
Combining equations (2.16), (2.19a) and (2.19c),
U oc Vt.
40
(2.22c)
2.2.4
Estimation of Macroscopic Properties
In general, the short circuit current cannot be found exactly without analytical solutions for the induced magnetic field profile b(y, z). Since the zero velocity point is known and the IV-characteristic
is linear, the system has one remaining degree of freedom. Determining any of the other unknowns (r;*, Vtoc, Isc, etc.) will uniquely define the characteristic. For moderate to large Hartmann
numbers (Ha > 100), an approximate closed form for Ic provides satisfactory results. The primary reason the short circuit current is chosen as the unknown of interest is that there exists an
asymptotically exact estimate of I.e that follows from an order-of-magnitude analysis and is made
complete using numerical results. For smaller Hartmann numbers the remaining degree of freedom is taken to be r;* as it is independent of the imposed pressure drop8 .
Large Hartmann Numbers
The Hartmann number Ha
=
dBo -o-pv describes the ratio of electromagnetic to viscous forces.
The addition of the Lorentz force does not decrease the integrated shear stresses experienced by
the flow. With increasing Hartmann number it follows that the short circuit current will result in
increasing forces that oppose the pressure gradient-that is, Ic moves relatively closer to I.
0.5-
0.5
1
0-1
I1 0
0-
I=
N
-0.5
-0.5
-0.5)
(a)
0
0.5
o10
0
-0.5
-0.5
0
.=
0.5
10
Figure 2.3: Plots of b(y/H, 0)/(pIo/L) versus y/H for (a) Ha = 5 and (b) Ha = 50. In each case
numerical solutions are shown for boundary conditions correspondingto I = 0, I = I.e and I =1.
8
This result immediately follows from equations (2.22a), (2.22b), (2.21g) and the relationship V 0 c/Uoc = WBo.
41
Let bo(y, z) represent the induced magnetic field when I = Io. Similarly, let usc(y, z) and
bc(y, z) denote the velocity profile and induced field when I = I.
Since the pressure gradient
is treated as a fixed quantity we obtain the following order-of-magnitude relationship between
the zero velocity and short circuit conditions using the x-component of the Navier-Stokes equation (2.13b).
'Bo Dbo
i.ap y
[
' 8p
I.
[x
ii
u
[
2u
y
use
s2 +
az2
+
Bo ob8c
P Dy
The ratio of Lorentz forces is equal to the ratio of currents. Dividing through by [(Bo/p) Db'c/By],
and recognizing the ratio of the viscous force to Lorentz force as a scalar multiple of 1/Ha,
10
Io
Isc
A
ay__
j po
+2 c9
±i
1
{
(a -a-7v
00
Ha
_BoQbsc
Boabsc
In agreement with numerical simulation, choosing a
in the limit Ha -+
a
2 provides an estimate of Ic that is exact
and agrees reasonably well with numerical solutions when the Hartmann
number is over 100.
IscI
~ Ha
Ha + 2
(2.23)
Small Hartmann Numbers
In the case of small-diameter channels for which Ha < 100, the approximation of I'c no longer
holds. Equations (2.21g), (2.22a) and (2.22b) imply that r/* is independent of both Ap and L. For this
reason r/* provides perhaps the most usefulfigure of merit for evaluating a generator'squality based entirely
on the cross-section, imposed magneticfield and intensive propertiesof the liquid metal. Substituting Vte
from (2.18) into (2.21g),
SC = Io (10+*)2
(2.24)
Figure 2.4 contains a diagram of r* values obtained via simulation for Hg and GaInSn under the
relevant range of rectangular channel parameters.
42
0.9
0.8
2.51
2o
0.7
-a-l--
0.3
0.5
1
-
0.1
0.23
.1
-
0.1
-
--
-
-
--
-
-
s
0
0
0.0005
0.0010
0.0015
0.0020
0.0025
0.0030
side length (m)
Figure 2.4: A plot of the maximum efficiency for Hg and GaInSn as afunction of the side length of a square
channel and the imposed magneticfield.
43
2.2.5
Experimentation and Systems Design
Thus far we have treated the channel as an admittance: fixing the pressure drop through some
assumed external supply and the net current via boundary conditions, the system of differential
equations results in a velocity profile. The simulations in chapter 3 require that the system be
posed in this manner. In practice, it is difficult to accurately measure pressure and easy to accurately measure velocity given the time scales encountered when shooting slugs of mercury down a
tube at sufficient velocities to obtain good voltage readings. From the design perspective the modeled channel is only a part of a larger system and the relationship between U and Ap imposed by
the rest of the system cannot be neglected. Letting Ap vary with U complicates the analysis since
many of the macroscopic properties of the channel (e.g. Vtc, Ic, Io) depend on Ap. Fortunately, r*
depends only on the channel cross-section, imposed magnetic field and intensive properties of the
fluid. With respect to both design and experimentation the channel is more intuitively described
as an impedance, providing a resistance to flow that results in a conversion from kinetic energy
to electrical energy and heat. Expressing Vto and I,, in terms of q*, (2.19c) can be rearranged to
describe this impedance.
-
p
1
1+ q*2
RE - R.
27 *
Re+Rj
LB
(2.25a)
The voltage is similarly expressed in terms of U as
Vt = VtOc-
Uoc
Re 2 R+
- WBoU
(Re + Ri
(2.25b)
with the current and electrical power given by I = Vt/R and Pelec = I14. The efficiency depends
only upon Re, R,
=
W/HLo and r*. The only parameters needed to determine the efficiency-
optimal load resistance are q* and Ri.
2ReRi
(Re + Rj) 2
1±+ *2
27q*
Rj*= Ri
44
1 + 7*
1 - 77
Re - Ri
Re+ RJ
(2.25d)
In conclusion, the model presented for steady well-developed MHD flow through rectangular
channels with insulating Hartmann walls and conducting side-walls provides sufficient predictive
capability to verify its correctness experimentally and the intuition needed to apply the results to
a more complex system for which the magnetic region is but one of many components. While the
results rely on numerical simulation, the dependence is limited to a single parameter
i*
that amaz-
ingly does not depend on the flow rate, pressure drop, channel length or load resistance. Values
for 7* obtained numerically for various fluids and magnetic fields are provided in figure 2.4 and
are a distillation of extensive simulations. Referencing the diagram directly will allow square channel
design without needing to resort to numerical simulations. The hydraulic impedance given by (2.25a)
provides all information necessary to integrate the channel into a larger system. This hydraulic
impedance depends on the external load between the electrodes, tying the current-voltage characteristic of the channel and load to the fluidic behavior of the rest of the system. Finally, the
conversion efficiency is described in (2.25c) as a function of the load resistance, obtaining its maximum when the load is given by R, in (2.25d).
45
2.3
Electrical Characterization of Circular Channels
The uniform imposed magnetic field ties the MHD effects to Cartesian coordinates and the analytical macroscopic relationships between the operating points do not hold in a circular channel. Nonetheless it is necessary to consider the MHD equations in cylindrical coordinates for the
purposes of experimentation-our later channels were cylindrical following concerns over the
smoothness of the channel walls and changing cross-section in the axial direction under rectangular geometries (e.g. when connecting between components with tubing). Numerical results are
still possible and the optimal operating points remain informative in cylindrical coordinates. The
primary purpose of the following is to enable experimental verification of the power-generating
capabilities of mesoscale MHD flows. This section briefly covers the relevant PDEs in cylindrical
coordinates (r, 9, x), the boundary conditions on b(r, 9) for a channel of radius R (as a function of
the net current flow I), and the method by which V can be found from a numerical solution.
tBO
JR4
AT
Figure 2.5: The circulargeometry for magnetohydrodynamicpower conversion is similar to the rectangular
geometry in figure 2.2. The imposed magneticfield remains uniformly Bo p; the the fluid velocity u(r, 0)
and inducedfield b(r, 9) are both in the axial direction c.
Applying the same assumptions as for rectangular channels (well-developed flow, infinitely
46
conducting electrodes, a magnetic field outside the channel unperturbed by the induced field,
etc.), the x-components of the induction and Navier-Stokes equations are
0l+
1 (10b
Tp
r
r
( lu
Op
ax =r"
- pu++r or
a2b
1
Or2
rr
10
b
1 g 2u
0 2u
(9r2 +0r2 ag2
+B 0
u
cosd-
sin 00u
(2.26a)
,
r
ob
Bo
+± p cos Dr
sin 0 ab
r
r
86)
.(2.26b)
As depicted in figure 2.5, the electrodes are again on the "side walls" and are symmetric in both y
and z. The (+) electrode sits between -0e and 0e; the (-) electrode sits between 7r - 0e and r + 0e. No
current flows into the insulating walls or along the conducting walls and the boundary conditions
are
Ob
= 0
-
Or
Owall=
Ob
00
00
0.
Integrating the 9-component of the current density over the 0 = ±w/2 plane implies that the
boundary conditions on the induced field at the insulating walls are identical to the corresponding
boundary conditions in the rectangular geometry.
2L-
if 0
[e,
- e]
b(R, 0) =
(2.27)
+
L.
if 0E [r+e,
2r -0e]
Finally, the terminal voltage is found by numerically integrating the r-component of -E between
the electrodes at 0 = 0 and 0 = r. Numerical simulation confirms that again the velocity and
terminal voltage increase linearly with -I.
In contrast, the zero-velocity operating point is less
informative from a purely analytical point of view. It seems likely that there is a closed form
solution but it is easy enough to simulate the results instead. All this means is that two operating
points instead of one must be found numerically before the full IV-characteristic emerges.
47
Hypothesizing a linear relationship between current and voltage as for the rectangular case,
we again obtain the relationship Vt = Vtoc(1 - I/IIc). The remainder of the macroscopic relationships (2.18-2.21g) for rectangular channels can be shown to hold with the minor modification
that A = 7rR' is used for the area. Though straightforward, simulations are required to find the
parameters Ri, Vtc, Ic and Uc.
Deriving cylindrical equivalents to the more usable constitutive equations for channel design
that were given by equations (2.25a-2.25d) is not trivial. By considering units, the zero-velocity
current must be equal to (-Ap)/Bo multiplied by some unknown length scale R and the open
circuit voltage must likewise be given by WBoUc for the unknown length scale W. Following a
good bit of algebra, (2.25d) can be expressed in a form that can be used for cylindrical channels.
RW/ Ri
(2.28)
WNH/A - 7*
Similarly, the channel impedance to flow is
-ZAp
U
_
4BO (WH/A) 2 ±+71
2N R%
2(W/A)r*
Rj - Rz\.29
Re + Rj '
(2 29)
It is reasonable to question the benefit that these additional equations provide given the heavier reliance on simulation to find 1* and even terms such as R,, W and H. Each of these terms
depends on the geometry, fluid and magnetic field of the channel in question but they do not
depend on the operating point (pressure drop, flow rate, load resistance, etc.) and so one set
of parameters will need to be found by simulation to describe all future behaviors with simple
constitutive relationships.
2.4
Implications for Generator Design
A consideration of the channel resistance magnitude is sufficient demonstrate the primary difficulty with the construction of MHD-based generators at the meso-scale. For 1 cm long electrodes
on either side of a square channel9 containing mercury, the internal resistance is around 1E-4 ohms.
9
For a square channel Ri reduces to 1/Lo-.
48
Considering (2.25d) for a generous optimal efficiency range of q* < 80%, the load resistance to
maximize the efficiency would still be under a milliohm. The load maximizing electrical power
would be well under 10 milliohms. Such small voltage/large current characteristics cause many
complications in the experimental portion of this thesis. Furthermore, low voltage signals are
highly susceptible to ohmic losses, making the design of a viable generator a highly technical endeavor involving latching low-voltage power circuits at a very close proximity to the electrodes
themselves. There are some other more exotic methods based on clever electrode design and surface engineering that could potentially increase the voltages seen but it is well outside the scope
of this thesis.
49
50
Chapter 3
Numerical Simulation
This chapter will briefly describe the finite difference solver applied to the systems derived in sections 2.2 and 2.3. The numerical model is based on the same assumptions as the model established
in section 2.1. As a consequence, it can add credibility to the analytical results derived from those
assumptions but not to the assumptions themselves. Validation of the model must include at least
some empirical analysis, as outlined in chapter 5.
Flow simulations involving square channels are provided and shown to agree with the previously derived analytical results. An example solution for a square channel allows a closer examination into optimal configurations for power generation and may provide some intuition on the
variable scales one should expect.
3.1
Solution Methodology
The channel geometry, intensive fluidic properties and pressure drop are treated as fixed parameters. The net current I is treated as an independent variable that can change for various simulations of the same channel. For a given value of I, the boundary conditions on the induced field
at the insulating walls are given by 2.14 in the case of a rectangular channel and by 2.27 for a
circular channel. The resulting profiles u and b are output by the solver and used to derive the
macroscopic properties of the channel. Each operating point has an associated current for which
the solver can again provide profiles for u and b. The open circuit operating point is found for
51
rectangular channels by inputing I = 0 into the solver. For circular channels where two operating
points must be numerically determined, the solver is applied for both the open circuit situation
and for the arbitrarily chosen value I =1 A.
3.2
Characteristic Variable Scalings
To reduce floating point arithmetic errors and allow for easier comparison of results, the PDEs are
first converted into dimensionless form according to the scalings described in section 2.1.3. The
hydraulic diameter is chosen as the characteristic length scale. For the first calculation (I = 0)
the velocity scale is chosen to be 1 m/s to find Uc. The resulting profile is then rescaled by
UOC, the velocity scale chosen from there forward. The net current is assumed to have an upper
bound of Io whereas
Mac
is the upper bound on voltage. Letting [I] = Io be the characteristic
current and [V] = Vac the characteristic voltage, the remainder of the variable scalings follow
from constitutive relationships. Table 3.1 enumerates the various characteristic scalings for the
different macroscopic variables.
Variable
Scale
[voltage]
vtoe
[current]
Io
velocity
UOC
[magnetic field]
pIo/L
resistance]
Vtoc/Io
[power]
vtocI0
Table 3.1: Characteristicvaluesfor macroscopicproperties.
3.3
The Nonuniform Mesh
A nonuniform mesh of around 900 points with fourth-order discrete derivatives is used to construct the dimensionless difference equations. The addition of the Lorentz force creates regions
52
with large velocity gradients and the nonuniform mesh/high-bandwidth derivatives allow for
convergence without substantially increasing the number of unknowns and consequently the running time of the simulations. The impact of such improvements is easily seen in figure 3.1.
The nonuniform spacing of the mesh makes it difficult to bound the relative error but the flow
rate found by simulation with B 0
=
0 and the closed form for Poiseuille flow in a circular channel
agree to within around one part in 108. The numerical results for a square channel compare to the
Fourier series prediction to within around three parts in 10 4 , with the increased discrepancy likely
due to insufficient resolution at the corners [MOB05, Whi03, Whi74].
3.4
Numerical Observations
This section provides numerical validation of claims made in section 2.2 along with other important observations that help elucidate macroscopic relationships.
Observation 1. For both rectangularand cylindrical channels, U/UC
1 - I/o.
=
Simulation results performed for seven rectangular configurations are detailed in figure 3.4.
In each case, the current used to calculate the boundary conditions on the imposed magnetic field
is varied from 0 to Io in increments of 0.1 Io. For the 11 simulations of each configuration, the RMS
error and maximum error of the difference between the value for U/Uc obtained numerically and
the predicted value 1 - I/Io are given in the table of figure 3.4 and are well within the limits of the
expected numerical error1 .
Observation 2. For both rectangularand cylindrical geometries, Uc c -Ap/L.
Observation 3.
For both rectangularand cylindricalgeometries, u is symmetric in both y and z whereas
b is antisymmetric in y and symmetric in z.
The simulations are performed over a mesh with Ny = 37 and N 2 = 25 points and average distances Ay
0.028 and Az = 0.042 (normalized by H and W, respectively). The derivatives were approximated using 4th -order
4
4
polynomials and so the error in u(y, z) would be expected to be on the order of max{(Ay) , (Az) }
integration to find U the accumulated error is expected to be on the order N 2 (Az)
53
4
~ 7.5E-5.
=
Az 4 and under
'=1
+
i. I. I.
+ 4- + + + + +
4 + i fvTr-+-F -TT 7
. . . . . .
+ +
+
+
+
+
+
+
+
+++
+
4
+
i
I
+
t
.
.
.
.
.
1.
.. . . . . . . . . .
4-+ + i . . . . . . . .
F i -f + i . . . . . . . t- t t + + t . . . .
+ +
++++I ........
* ...........
fi++++i ........
f ...........
ff
i- + + + i . . . . . . . . f- I- + + .
f f + + f +
f+++i
........
f-Ff ......
f++t+
+ + + + 4 . . . . . . . . t +- i- t . . . . . . . . . .
t+++l
.........
** ...... f++f+
++++i++f
.......
f .........
f+
+- + + + i . . . . . . . . . f i- i- + + + + + + + f + +
++++i
.........
t+If+++++t+tt+
+ + + + i + + t- It . . .
t t * . . . . . . . . . .
+ + + i.
. . . . . . . . . . . i. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . f- + +
. . . . . . . . . . . . . .
.. . . . . . . . . .
+ + +
+ + + + + + + + + +
+- t + + + + t + + + +
+ + + + + + +- 4- + 4- 4-- 4- + 4- 4--jJ 4- + N-W +
+
!rF 7
y 0.0-
A- ...........
1.51.0u(Y,z)
0.51j
......
- 0.5
-0.5
-0.5
z
~-" -0.5
0.5
0.0
'I
-0.5
0.0
z
(a)
Y
0.5
(b)
1.2Y
0.8u(y,z)
0.41
1- 0.5
0.50
z
-0.5
-0.5
(c)
0.0
Z
0.0
0.5
-0.5
Y
0.5
(d)
Figure 3.1: Plots of numerical solutions for the induced magnetic field and velocity profiles using finite
differences benefit from nonuniform grid spacing and high order derivatives (c and d) due to significant
gradients near the Hartmann walls. In each case, Ny = 25 and Nz = 29.
54
Q A
+ B
OC
D
X E
F
O G
1
1
0.75-
U
0
0.50-
UIC
0.25-
00
0.25
0.50
0.75
1
I/Io
A
B
C
D
E
F
G
LM
Hg
Hg
Hg
Hg
Hg
Hg
GaInSn
Bo (T)
1
1
1
1
1
1
Ap (PSI)
1
1
1
1
1
1
W (mm)
1
1
1
H (mm)
1
1
1
1
1
1
1
1
1
L (mm)
10
10
10
10
10
20
10
MAX (A.U.)
6.24E-6
1.66E-5
1.00E-5
4.72E-6
1.83E-5
1.11E-5
2.22E-6
RMS (A.U.)
3.77E-6
9.19E-6
5.75E-6
2.34E-6
1.OOE-5
4.54E-6
1.08E-6
Figure 3.2: Numerical results demonstrating the expected relationship between velocity and currentfor
rectangular channels. Correspondingresults for circularchannels are not given here but have likewise
agreed with predictedvalues with similaraccuracyfor the various configurations that were simulated.
55
3.5
A Concrete Example
Consider a square channel that is 2 mm on a side and 20 mm in length. Under a 1.4 T magnetic
field (easily obtainable using permanent magnets) we wish to determine the IV-characteristics of
a mercury flow in response to a pressure drop Ap = -3 kPa. At room temperature the liquid
metal has density p = 13546 kg/m 3 , kinematic viscosity v = 1. 148E-7m 2 / s, electrical conductivity
o-
1.0445E6 Q-'/m and magnetic permeability p ~po = 47rE-7N/ A 2 . The Hartmann number of
the flow is Ha = 72.567. The zero-velocity current is Io = 4.286 A and the internal resistance of
the channel is R, = 0.0479 mQ. Simulation of the system with boundary conditions implied by
I = 0 provides the velocity and induced magnetic field profiles shown in figures 3.3a and 3.4a.
Numerical integration of u(y, z) divided by the CSA shows that Uc = 2.176 m/ s and from (2.16),
Vtoc = 6.09 mV. From (2.18), I8c = 4.146 A and the power- and efficiency-optimal operating points
follow from the relationships in (2.20) and (2.21).
Ut = 1.12m/ s
(Re = 19575)
Pe =6.32 mW
46.8%
r=
U*= 0.393m/s
(Re = 6847)
Pe*ec =3.27 mW
r/*
=
69.4%
Figures 3.3 and 3.4 show the velocity and induced magnetic field profiles that result from numerical simulation of the open circuit, zero-velocity, short circuit and optimal operating conditions.
Figure 3.5 shows the vector current density fields for each of the operating points.
56
1.5.
1.5
1.0.
1.0.
use
u
UU
""C
0.5.
""I0.5.
-0.5
0.0
-0.5
-0.5
0.0
0.00-0.5
(a)
yI/H
0.5
z/W
0.5
z/W
0.0
0.0
yI/H
0.0
(b)
1.5.
1.5.
1.0.
1.0.
___ 0
sc
U
U
-0.5
z/0W
-0.5
0.5
zW
0.5
(d)
(c)
Figure 3.3: Plots of the numerically derived velocity profiles, scaled by Ue, for various operating points:
(a) I = 0, (b) I = I*, (c) I = Ise, and (d) I = Io.
57
0.5
.0.5
-0.0
. 0.0 b*
11L
--
-0.5
-0.5
z/W
0.5 0.5
(a)
0.5 0.5
(b)
.0.5
.0.5
0. 0
-0.5
0.0
z|W
.s0.0 be0
.- 0.5
-0.5
-0.5
-0.5
0.0 y1/H
0.5
IL
-0.5
-0.5
z/W
I
-0.5
0.0
z /W
0.5
-0.0
0.5
y1IH
0.5
(d)
(C)
Figure 3.4: Plots of the numerically derived induced magneticfield profiles, scaled by pIo /L, for various
operatingpoints: (a) I = 0, (b) I = I*, (c) I = Ie, and (d) I = Io.
58
0
PF
---------------------------------~~
-
-
~~
-
-
- -
- - - --A-
-
-
- --
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
IN
:r-f j
9
:Z
j = za Z:3 --z ;;1 Z4
=;j
=2
9 =3
9 =3
;: A
0 PR PopW M 1,0 ;A X
;
A
(a)
(b)
(c)
(d)
Figure 3.5: Vector field plots of Jfor various operatingpoints: (a) I
- 0, (b) I = 1, (c) I = I, and (d)
I = 1 o. The shaded scale bar and shading in the vector plots correspond to the relative vector magnitudes
within a each plot, scaled to the range [ 0,1].
59
3.6
Conclusions from Numerical Simulations
The numerical simulations performed agree with the relationships predicted by the theoretical
model in chapter 2, both for rectangular and for cylindrical channels. For rectangular channels
the finite difference solver can be used to find the open circuit velocity from which the entire
set of remaining macroscopic values follows. Circular channels can be analyzed using the same
method although a second operating point must first be found numerically before the remaining
macroscopic values are known. Given the agreement between simulation and theory, the model
in chapter 2 is self-consistent and can be applied to the experimental results in chapter 5 and
design in 6 to provide more insight into the merit of small scale MHD-based generators. Theory
and simulation provide the desired tools for channel optimization and the numerically validated
results allow for the integration of such a channel into a more complex system providing the
pressure drop necessary to propel the liquid metal and generate electricity.
60
Chapter 4
Unsteady Two-Region Slug Flow
The goal of this chapter is to move towards a one-dimensional model for the motion of liquid
metal slugs in a cylindrical channel experiencing an applied pressure drop. Assessing the predictive capability follows in chapter 5 though a correlation between simulated and observed results.
External imposed magnetic fields are neglected for now. The utility of such a model is that it allows the prediction of slug velocity prior to and upon entering a magnetized region that can be
compared to voltage measurements. From this model of slug behavior without magnetohydrodynamic effects, observing the modified behavior of slugs entering and leaving a highly magnetized
region leads to a characterization of the action of an imposed magnetic field on the terminal voltage.
The assumptions made to simplify the system only make sense within the context of specific
flow regimes. The model development will be done explicitly with respect to experiments designed to observe trajectories in chapter 5. As would be expected, a significantly less complex
model suffices to describe the trajectories of long slugs that remain under the velocity of breakup
than is required to capture the more dynamic behavior seen in the coupled trajectories of multiple short slugs. Our primary attention will be restricted to the motion of isolated and contiguous
slugs that maintain a nearly fixed length' while traveling the length of the polycarbonate channel
pictured in figure 4.1. The channel is 150 mm long and the cross-section is circular with diameter
'That is, barring the severe elongation often seen prior to slug breakup.
61
Hg
'Polycarbonate
~
*N2
Hg +
N2
Eectrodesl
Figure 4.1: A 1.2 mm diameter circularchannel was constructed out of polycarbonate to allow observation
of slug trajectories.
1.19 mm (3/64 in). Midway along the channel are a pair of nickel-plated copper electrodes that
are incident on either side (as indicated in figure 2.5) to allow for voltage measurements. To avoid
introducing sharp edge effects, the electrodes were first glued into pockets in the polycarbonate
so that a CNC mill could then produce uniform channels with a 3/64 in ball-end bit at a precisely
controlled feed rate designed to give the best surface finish that could be expected with a mill.
The electrodes allowed for voltage measurements to be taken with the magnetic circuit in place.
The length of the electrodes led to a very small ratio of voltage to current making data difficult
to interpret. The method of machining the electrodes after they were first embedded in the polycarbonate led to smooth and uniform channel walls but also caused some deflection in the mill
bit and the electrode surfaces were not symmetric about the horizontal channel mid-plane. Other
channel designs were used in the experiments highlighted in chapter 5 when MHD effects came
into play. For the current model, the smooth walls allowed better viewing of the slug trajectories.
On the left side there are two separate inlets-one for mercury and the other for the inflow
of nitrogen from the supply. An air restriction is placed between the reservoir and the channel to
precisely regulate the incoming gas flow. Both fluid components leave the channel through the
outlet on the right side. Mercury slugs are propelled along the channel by applied pressures of up
to 50 kPa (7 PSI). Slugs begin to occasionally break apart above around 1.0 m/s (We = 17) when
inertial and viscous forces begin to dominate surface tension. Viewing slug trajectories at 1 kHz,
the position and velocity were reconstructed reliably from sequences of images like that shown in
62
figure 4.2. In some instances the critical Weber number was seen to exceed 28 over a large sampling
of consecutive slugs. While both the surface tension and inertial forces are significant, deviations
from results such as [Tar93] probably arise due to the partial confinement of the mercury slugs
within a tube that is small enough to constrain the shape of the slugs. Regardless, this discrepancy
is interesting and suggests slug breakup cannot be expressed solely in terms of the Weber number.
In the flows considered (even for trajectories where breakup does not occur) the Reynolds
numbers were in excess 2300, ranging from 5200 at 0.5 m/s to upwards of 16000. Furthermore,
the slugs observed were relatively short in comparison to their overall distance of travel and the
velocity of each slug changed enormously over the course of an experiment. It follows that laminar
flow is certainly not to be expected and our model must account for its unsteady nature.
The Bond number Bo = 0.1 is in agreement with the observed behavior of the slugs. While
mercury is an extremely dense liquid, its surface tension acts to counter gravity and maintain a
cylindrical slug shape in reasonably good contact with the channel wall. The channel is oriented
horizontally in the experimental setup and thus gravitational effects are neglected in this model.
63
Figure 4.2: This image was taken of a slug moving down a channel having identical cross-section as the
channel depicted in figure 4.1 but a different axial electrode length. This channel is used in section 5.4 to
observe voltage profiles of individual slugs as the load impedance is varied.
64
4.1
Model Development
A significant amount of time has been devoted to reducing sources of unpredictability in the experimental setup. Even still, there are many forces that combine to determine the motion profiles;
assessing which play an important role and which can be neglected is of course a good first step.
At the most basic level, nitrogen flows from an isothermal reservoir (RO) through a small throat
designed to restrict the flow rate into the volume (R1) that precedes a slug. As the slug moves this
volume changes. The pressure at the trailing face of the slug depends on the nitrogen mass that
has accumulated within R1. Included in the model is the nitrogen's ability to leak around the slug
in the direction of decreasing pressure between trailing edge and the atmospheric pressure at the
leading edge (R2).
Po, To, po,pv}
r0 ->1
{p, 7, pi,v }
r 1-+
{P2 ,T2,
P 2, v
}
2
PM'L
L
FX
-0
Figure 4.3: Region RO is the stationarycontrol volume between the valve at the outlet of the supply reservoir
and the nitrogenflow restriction (the throat), region RI is the time-varying volume of nitrogen between the
restrictionand the trailingedge of the slug, and region R2 describes the conditions at the outlet. The mean
velocity of the slug is UiZ and the gas mass flow rate between successive stations is rh_. Ultimately
all three regions will be approximated as isothermally existing at room temperature T = Ta due to the
time/length scales involved.
Three regions of interest are indicated in figure 4.3. Characterizing the thermodynamic state
in each is relatively straightforward and sufficient to formulate a reasonable model of the gasdynamics describing many of the empirical observations. The three regions will ultimately be
modeled as existing on the room temperature isotherm and the only justification needed is to
show equilibrium at room temperature is attained on a much shorter time scale than that of the
65
experiment itself. Following the model describing the compressible nitrogen flow we present a
highly simplified view of the slug dynamics that agrees well with experimental data. It is also
possible that such a model could be used to predict slug breakup.
4.1.1
The Nitrogen Supply Reservoir
Heat Sink
Precision
Regulator
Desiccant
Dried N2
RO
(to throat)
House N2
Supply
Reservoir
(100 mL)
Valve
Figure 4.4: The air supply reservoir used in all experiments to ensure a known/stable thermodynamic state
at the input.
The nitrogen reservoir was supplied by an in-house line in which the gas was scrubbed to
remove moisture and reduced to a gauge pressure of 20 PSI (137.8 kPa) before it passed through a
heat exchanger to ensure a constant isothermal temperature of Ta
=
22.4* C. Finally, the nitrogen
flowing into the 100 mL reservoir passed through a high-precision regulator 2 that brought it to
the desired pressure, measured by a solid state pressure gauge3 to within 0.01 PSI. Humidity and
temperature measurements were made at the outlet of the supply on a continual basis to ensure a
2
3
Make/model: Controlair 100LR Precision Air Pressure Regulator
Make/model: Cooper Instruments & Systems DPG 1200
66
stable and known state.
Supply
Figure 4.5: A block diagram of the supply, valve and flow restriction that allowed precise control over the
pressure preceding the slugs.
The conditions in the reservoir remained essentially isothermal after the valve was opened.
Thermal effects within the reservoir due to the nitrogen flow were dominated by the buoyancy
driven mixing within the reservoir [Kat09] 4 . The conditions in RO were not in perfect agreement
with the supply due to transients that followed the valve actuation. From the experimental configuration depicted in figure 4.5, it would seem necessary to place the valve immediately at the
throat of the restriction to attain isothermal conditions at the throat throughout the entire course
of an experiment. Numerical simulations that take the transient into effect show that reducing the
volume of RO would not significantly affect the result.
Let {Pres, Tres (
Ta), Pres} be the state of the nitrogen 5 in the isothermal supply reservoir and
let {po, To, po} be the conditions in RO. The nitrogen in RO was initially isothermal at the environmental conditions Ta and Pa = 101.3 kPa. As the valve was opened this material volume
first underwent a nearly instantaneous adiabatic contraction (neglecting any mixing or outflow
given the large ratio of tube length to diameter) as the pressure increased to that of the reservoir. Through conductive heat transfer between the nitrogen and the tube wall and the balance
of convection inward from the reservoir and outward through the throat (along with subsequent
4
The blow-down circulation number of our experiment at 7 PSIG was BC = 0.054 and so the rate at which the
nitrogen in the supply volume approached room temperature after the valve was first opened was on the order of 8
times as fast as the time scale associated with convection through the throat.
'The corresponding density follows from the ideal gas law: pre
specific gas constant for nitrogen.
67
= pres/R T where R = 296.96
J/ kgK is the
mixing), the nitrogen then underwent isobaric cooling to the equilibrium point of Ta. The process
is illustrated in figure 4.6.
P
Isobaric
- Adiabatic
Figure 4.6: Adiabatic compressionfollowed by isobariccooling.
Nondimensional arguments in section 4.2 demonstrate that the transient will not have a substantial effect on the macroscopic behavior of the slug trajectory. Effectively, the time scale to attain
thermal equilibrium following expansion/compression of the gas during the experiment is found
to be an order of magnitude shorter than the time scale of the experiment. Finally, the inflow of
gas through the throat between RO and Ri-which is modeled as adiabatic and must therefore
generate a thermal gradient as it warms to the temperature of the surrounding gas-is shown in
section 4.2 to be thermally well-developed on a length scale that is short with respect to the length
of R1. A perfectly isothermal process is assumed and later justified in section 4.2. The implication
for RO is that the pressure is treated like a step function at the start of the experiment while the
temperature remains constant.
{Pa, Ta,
Pa/R Ta}
for t < 0
{Po, To, po} =
{Pres, Ta, Pres/RTa}
68
for t > 0
4.1.2
Nitrogen Inlet Restriction
The reservoir was connected through a valve to a small throat through which the flow is assumed
adiabatic and isentropic. This restriction governed the flow rate and was an integral component of
the closed-loop system. Control of the flow through the use of well-characterized throats greatly
simplified the inflow model. The reduction in complexity followed only after making the assumption that the majority of the gas flow existed at room temperature in a nearly isothermal state. An
order of magnitude analysis in section 4.2 provides validation of this approximation.
The cross-sectional area Ain of the throat was the most critical control parameter for imposing
a desired correspondence between flow rate and pressure drop. The throat was fabricated to
specification in polycarbonate film via a 193 nm pulsed Resonetics Laser Ablation System. The
dimensions of the throat were measured with reasonable precision under an optical microscope,
and verified using the water displacement measurements of flow rate detailed in section 5.1.2.
Figure 4.7: A diagram of the unsealed air restriction housing shows the seating of the polycarbonatefilm
containingthe ablated orifice.
Depending on whether the pressure in R1 was smaller or larger than that of RO, the nitrogen
mass flow rate through the throat from RO to R1 was given in terms of the thermodynamic state
69
{p', To, p'} at the throat inlet and {p', T', p' } at the outlet by
A n
k1of pO
)2/k-
if
( 4 )(k+1)/k
<p/
m0e 1 =
(4.1)
2k
/
-Ar,
( )/
k
otherwise
where we have made the implicit assumption that the gas at the side of greater pressure was in
an isothermal state and not on the same adiabat as the gas on the side of lesser pressure. This
assumption was justified only in cases where the flow did not oscillate back and forth on a time
scale that was short compared to the time to reach isothermal equilibrium. In the case of strictly
forward flow (i.e. po 2 pi) the conditions at the inlet of the throat are considered to have been
identical to the conditions throughout RO.
Po
Pi
==>
{p'o, T0, p'o} = {po, To, Po}
In contrast, having just undergone a rapid adiabatic expansion the flow immediately at the outlet
was not in an equilibrium state. However, the pressure at the outlet was nearly equal to the
pressure pi outside throat's immediate vicinity. Consequently, (4.1) implies the flow upstream of
the air restriction was coupled to the flow downstream only by the downstream pressure. The
argument is identical for the case where po < p1.
4.1.3
Isothermal Nitrogen Volume
The state of the nitrogen downstream of the throat was initially {pa, Ta, pa}. Modeling the flow
in R1 as thermally well-developed on the environmental isotherm, we neglected the deviation
of Tj from Ti = T and used the ideal gas law to calculate pi from p1. The dependence of the
downstream flow on the conditions in RO was limited to the mass flow rate rhi0 1 through the
throat, as it varied over the course of the experiment. Letting mi(t) and V1 (t) denote the nitrogen
mass and volume at time t, the density was given by pi(t) = mI(t)/V (t) where the initial mass
was the product of the initial volume V1 (0) (a known parameter) and the initial density p1(0) = pa.
70
The differential change in mass was rm
0,
(see figure 4.3) implying that the nitrogen mass
- rm1,
at time t was
mi(t)
=
/t
PaV1 (0) + 10(rhu
04
-
lhl-
2)
dt.
The radius of the channel was Rt = 0.595 mm and letting xo (t) denote the axial position of the
slug's trailing edge (where xo (0) = 0), the volume of R1 was then
V1(t) = V1(0) + rRxo(t).
Employing the ideal gas law,
pi(t) = RT m1(t). -m(t)
All that is needed to provide a full characterization of the state in R1 over the course of the experiment is a model describing xo(t) and rh1 ,(t).
4.1.4
Gas Flow Near the Slug
The nitrogen in R2 (at the leading edge of the slug) was open to the environment and is approximated as having been homogeneous and constant.
{p 2 , T 2 , P2} = (pa, Ta, Pa}
As proposed in [GVT+05], the hydrophobic interaction between the slugs and the channel wall
led to behavior that suggested a relaxation of the no-slip condition. The hypothesized mechanism
behind such observations was the slug failing to contact the wall everywhere and so the boundary condition was an averaging of free surfaces and regions of no-slip. Observations performed
during the course of studying MHD effects agreed with the observations of Gogte et al. but the
proposed mechanism differs. Within a confined channel (as opposed to droplets on an inclined
plane) pressure imbalances developed between the leading and trailing edges of each slug. The
gradient suggests that slugs allowed some quantity of gas to leak around them in the direction of
decreasing pressure and is the hypothesized mechanism to explain why highly regular trains of
71
smaller slugs were clearly favored at higher pressures/velocities to single contiguous large slugs.
The assumption of gas flow around slugs was well supported empirically:
" the degree of observed expansion and contraction of the gas volume separating small slugs
could only be realistically explained by a changing nitrogen mass;
" in the limiting case of slug breakup it went without saying that nitrogen leaked around the
mercury to create new gas volumes separating the smaller slugs;
e
most importantly, simulations that took into account nitrogen leaking around the slug supplied further evidence through their ability to more accurately predict the trajectories that
were empirically observed.
Describing this ability of nitrogen to leak around short slugs leads to a model that fits the largesignal behavior of the slug trajectories.
Rt
U(t)
L
Figure 4.8: A diagramdescribingthe geometry of the two-region annularflow model.
As in figure 4.8, a slug is modeled as a cylinder of length L with rounded leading/trailing
faces and traveling down a channel of circular cross-section. The channel has radius Rt whereas
the radius of the slug is aRt for 0 < a < 1. When a < 1 gas flows around the slug through the
annular region aRt < r < Rt. The extent of the annulus (1 - a)Rt is assumed to be around the
same order as the channel wall's average roughness, estimated to be between 500 nm and 10 pm.
This estimation is in basic agreement with results detailing polycarbonate machined under similar
72
conditions to attain various surface characteristics [Bra08]. Hydrophobic contact with textures on
this scale would correspond to capillary pressures on the order of 100-2000 kPa for the liquid
metals of interest. Comparing slug lengths at rest to their length during travel, the maximal extent
of the annular region is empirically estimated to be around 0.05 Rt, corresponding to an increase
in length of around 10%. Under the assumption that the slug length far exceeds the extent of
the annular region, (1) the Reynolds number is assumed (and later verified) to be small enough
to justify a parallel flow approximation for the gas leaking around the slug; (2) given the high
conductivity of the liquid metal and short thermal time scales that follow from the small radial
extent in the annular region, the nitrogen flow is modeled as isothermal with temperature T
and corresponding viscosity
PN2 VN2 =
1.775E-5 kg/ms. The Mach number of the nitrogen in this
region is assumed (and later verified) to be much less than 1 so that an incompressible model
suffices to describe the macroscopic behavior of the flow around a slug.
Let U(t) R be the slug velocity and U'(t) i be the velocity at the cylindrical surface of the slug,
which also forms the inner boundary of the annulus where the no-slip condition is assumed. The
time scales over which U varies are observed to be much greater than the time scale over which
viscous forces diffuse across the flow 6 , allowing a steady flow approximation within the annulus.
All necessary and sufficient conditions for the lubrication approximation are thus satisfied. A
closed form for the flow profile follows from the superposition of Poiseuille and Couette velocity
profiles.
u_(r, t) =
U'
R2
ln(r/Rt) +
In a
4 pN 2VN 2
dp
ln(r/Rt)
1 - (r/R) 22_1- 1 - a2(42
I
(4.2)
n
Accordingly, the volumetric flow rate Qleak of "incompressible" nitrogen leaking around the slug
through the annular region and the shear stress acting on the surface of the slug in the k direction
6
The time scale for the diffusion of viscous effects is ((1 - a)Rt) 2 /vN 2 and is under 1 ms for all flows considered.
73
are given by
dp
rRe
Qleak(t) =PT
2V
8 pN2
2
"N2
-r(t)=
1- a4 +
d
(1 - a 2)2
nat2n
dp1Rt
(-4
dx
pN2VN2U'
Rt a In a
1
7R
2ay+
2U'
a2 +
- a2
(4.3)
a2
.(4.4)
aina
Despite a Mach number sufficiently small to justify an incompressible flow approximation,
the nitrogen density differs between the leading and trailing edges. A consequence of this is that
the pressure gradient in the annular region depends on the axial position as does the stress on
the surface of the slug. Insofar as we can approximate the flow as steady we can also roughly
approximate the pressure gradient to be (P2
-
PI)/L. Section 5.3 demonstrate strong correlation
between our model and experimental results, adding credibility to the approximations made here.
An average of the densities preceding and following the slug in conjunction with Qleak allows us
to determine the mass flow rhi 1 2 around the slug,
rh.
2
=
Qleak pIR Ta
where R is the specific gas constant for nitrogen and p =
(P2
+ pi)/
2
is the average of the face
pressures. The position of the trailing edge of the slug is
x0(t ) =
Udt.
4.1.5 A Uniform Liquid Metal Velocity Profile
At this point all that is missing is a model for the velocity field within the slug. The liquid metal
velocity at the boundary shared with the annular region is U'(t) and the shear stress is provided
by (4.4). We will neglect shear stresses imposed by the nitrogen on the leading and trailing edges
of the slugs given the much larger length scale and orientation of the surfaces with respect to the
primary (axial) direction of travel. The model we propose is trivial: it assumes a uniform velocity
74
profile within the slug so that
U'(t)
=
U(t).
A uniform model has the advantage of simplicity but effectively implies an infinite liquid metal
viscosity in order to satisfy the continuity of shear stress across the liquid-gas boundary. While
intuition initially suggests a uniform model of the velocity is a poor choice given the relatively
low viscosity of mercury, correlation with experimental data suggests otherwise 7 . The slug flow
we consider and our proposed model differ from the mechanisms proposed in [GVT+05]. The
flows considered are quite different even though both involve the behavior of small droplets with
high surface energy. The Reynolds numbers we encounter are well outside the laminar regime but
there are kinematic constraints that are far more interesting. In contrast to droplets on an incline,
slugs in a channel will not roll. They are constrained radially by the channel and a faster flow in
the center of the channel can only occur alongside significant vorticity at the leading and trailing
faces. Turbulence is to be expected and with the slugs experiencing accelerations that can exceed
20 m/ s2, a uniform approximation of the velocity field is not unreasonable.
As is common in approximations of partial slip, Gogte et al neglected the velocity gradients
within the air pockets and treated the microscale gaps as free surfaces with vanishing interfacial
fluid stress. In our model the velocity gradient is assumed to occur entirely within the annular
nitrogen flow. One benefit of this approach is a simple method to estimate the thickness of the
annular gas flow that is consistent with the empirical data if and only if the priors of lubricated
flow are satisfied. This agreement is considered in further detail in section 5.3 (particularly in figure 5.12). One of the more compelling arguments for reconsidering the approach to high surface
tension slug flow through enclosed channels is the empirical observation that more often than not,
slugs tended to remain contiguous even for Weber numbers of around 30. A possible explanation
for such discrepancy could be that kinematic constraints imposed by the channel differ from what
is seen in free space. For instance, Tamogrodzki proposed that critical We droplets expand outward into a disk in the moments preceding breakup [Tar93]. Deformations such as this are not
physically possible within the fixed radius of our channel. An interesting approach could be to
7
At least at the time scales relevant to the slug trajectories.
75
instead consider slug breakup from the perspective of balancing surface tension with the shear
stress imposed by the nitrogen flow onto the slug interface.
4.1.6
Inertial Forces
The mass of the slug m is conserved and is approximated using the combined volume of a cylinder
of radius aRt and length L, and hemispherical leading and trailing end caps of the same radius.
Changes in momentum are balanced by the net shear forces acting on the surface of the slug in the
x-direction as described in (4.4) and the difference in applied pressures acting on the leading and
trailing surfaces.
m
m-
dt
PLM
- EPN2v2U _R
_RtaIn a
4
(-
L
1 a3 R3
)
+7r a2R2L
2a +
alna
2raRtL
+ (-Ap) ra 2 R2
(4.5)
Given a set of configuration parameters such as the slug length, applied pressure, initial volume of RO, channel CSA, etc., the model developed in this section provides a system of equations
that can be solved numerically to predict the resulting slug trajectory and even conditions under
which we expect slug breakup. The only parameter that is not directly observable is a. Iterated
simulation will lead to an appropriate value but its value can be found from measurements of
variables less difficult to observe, namely U and A p. Considering the case where the net force on
the slug is zero so that dU/dt = 0, (4.5) implies a steady state value for a is given by
a =
1l+ 4 pN 2 VN
2
U L(46
RP U
(46)
It should be noted that this estimate is based strictly on assumptions that allow us to apply the
lubrication approximation. For short slugs or highly time-varying trajectories the approximation
fails as is clearly demonstrated by the fourth experiment in section 5.3. Even when the preconditions are satisfied, the method to approximate a is a bit tricky. Its value is nearly equal to one
and so errors in estimating U are tolerated far more readily than errors in estimating the pressure
76
drop (i.e. errors in the denominator for small values of A p). Despite this limitation on predictive
value, results using the numerically derived value for the average extent of the air gap agree with
experimentation. Furthermore, the fact that it agrees so well with the optimal values given by a
hill-climbing (greedy) algorithm adds confidence that the annular flow model can be trusted to
estimate liquid metal velocities for correlation with voltage measurements made in the portion of
the channel obscured by the magnetic circuit imposing the external field.
4.2
Returning to Justify the Assumptions
Before experimental results are provided and compared with numerical simulations, the assumptions made throughout the model's development are quickly shown to hold. Over the range of
possible temperatures we could encounter in the performed experiments, the thermal conductivity for nitrogen 8 is bounded by 0.02 < r < 0.03 and its density by 1.1
cific heat capacity 1039.3
J/ kg K, the thermal diffusivity
< PN 2
5 1.7. Given the spe-
a is bounded by 1.132E-5 < a < 2.624E-5.
The time scale for thermal diffusion within the modeled channel is given by R2/a, which ranges
from 10 to 30 milliseconds. The experimental time scales are between 100 and 350 milliseconds.
Therefore, we can neglect the thermal effects of both the transient in RO from the compression that
occurs upon opening the valve at t = 0 as well as the time-varying pressure in R1 over the course
of the experiment.
Left with the thermal gradient that develops at the outlet of the throat, showing that the Graetz
number becomes much less than 1000 for distances relatively close to the throat implies that the
entrance effects are negligible when modeling the slug trajectories. The Graetz number depends
on the velocity scale and thus on the thermodynamic state of the gas just after the throat. Modeling
this state as existing on the same isotherm as at the inlet and alternatively as existing on the same
adiabat as the inlet provides bounds on the appropriate velocity scale as a function of p1. The
velocity increases as p1 decreases and picking pi = pa gives an upper bound on the velocity in
each case. Restricting our chosen parameters to pres < 7 PSIG and A,
< r100 2 tim2 the length
8 The thermal conductivity of nitrogen is given in terms of its temperature (K) by r, = 1.52E-11 T 3 - 4.86E-8 T
1.02E-4 T - 3.93E-4 where T has units K and r, units of W/m K [NS95].
77
2
+
scale for which the Graetz number is under 100 is less than 1 cm and therefore small in comparison
to the overall length of R1.
4.2.1
Decoupling RO
We make extensive use of a property that follows directly from the discussion of short thermal
equilibrium time scales while considering a single slug as it traverses the channel. Moving to more
complex designs where periodic and even chaotic flow is expected, the thermodynamic conditions
in RO will remain mostly invariant over a range of changing conditions downstream of the throat.
The mass flow rate will change but for fixed supply conditions the intensive thermodynamic state
of RO can be assumed constant from the perspective of downstream system.
78
Chapter 5
Experimental Results
This chapter aims to provide evidence in support of the models presented in chapters 2 and 4.
Forcing small liquid metal slugs to flow quickly but also under highly known conditions requires
a collection of small fluidic devices like the restriction shown in figure 4.7. The first section in
this chapter describes a handful of such components that are used in the various experiments.
Section 5.1 also describes the magnetic circuit that was fabricated to provide the desired field for
studying MHD effects.
The second section is little more than an extension of the previous chapter and its purpose
is to determine to what degree single mercury slugs behave as predicted by the annular flow
model proposed in chapter 4 when no magnetic field is imposed. The empirical data are shown
to strongly support the model when the priors are satisfied. The reward is twofold: a better
understanding of the basic mechanics behind a flow of liquid metal slugs will inform the design of
a viable gravity-driven generator in chapter 6; having a tool for describing slug trajectories in other
experiments where optical measurements were not taken 1 will prove invaluable for validating the
model presented in chapter 2.
Section 5.4 provides a statistical analysis of the relationship between resistance and voltage
along with a compilation of traces obtained for single slugs. The observed results are compared
1 The high-speed camera used to record slug trajectories required substantial setup time, digital storage requirements (3GB/sec) and image processing to obtain useful trajectory information making it infeasible to use for every
experiment. Furthermore, the earlier channel prototypes were not designed to minimize obscured portions of the channels but rather to generate larger voltages.
79
to and shown to agree well with the numerical predictions in chapter 3. Section 5.5 provides
experimental results demonstrating the relationship between terminal voltage and velocity for a
square channel. Finally, the results of section 4 and various other measurements are applied in the
analysis of earlier experiments having substantial voltage traces.
Basic Methodology
The experiments involved transparent polycarbonate channels through which the trajectories of
mercury slugs could be optically measured (or at least observed). Three different fabricated channels are documented. The two different "modes" that describe the possible operation of each
channel are diagrammed in figure 5.1.
In contrast to numerical simulation where determining Vt
or I, was sufficient to fully charac-
terize the macroscopic properties of the modeled system, empirical observation/characterization
was more challenging and also far more interesting. Measuring Vto with accuracy was feasible,
though it would often require significant signal amplification and efforts to reduce noise. Considering the consequences of such amplification on the fluid flow itself became a source of uncertainty
that in future work should be laid to rest before ever reading voltage traces to begin with. Opamp drift added a significant source of uncertainty into the analyses. Accurate measurements
of I, were impossible at our length scale due to the low-voltage/high-current characteristics of
the flow. Resistances on the order of R, (typically around 0.1 to 1 mQ) would prevent sufficient
electrode shorting.
We assume a priorithe intrinsic liquid metal properties, cross-section of the channel and electrode geometry. The axial dimension of the electrodes was more obscure-it depended both on
the electrode geometry and on the contact length with the liquid metal. For instance, if a 1 cm
slug passed between 3 cm long electrodes, the contact length had a trapezoidal profile with respect to the slug position, attaining a maximum of 1 cm when the entire length of the slug was
in contact. In many experiments the average velocity was observed either by optical means or
by flow rate measurements. The terminal voltage was measurable to a high degree of accuracy
on an oscilloscope. Triggering and correlation to optical measurements of slug trajectories pre80
N2 Bupply I
Start Valve
(defines t=O)
LM Fill Port
(preload slug)
Restriction
---------------------------------- -----------
Check
Valves
"The Loop
Outlet & Collection
(atmospheric)
(a)
(b)
Figure 5.1: (a) In the open-loop configuration, a mercury slug was preloaded into the channel. A valve
was then opened to allow pressurized nitrogen to propel the slug into a collection vessel at atmospheric
conditions. This method was used to examine the behavior of a small number of slugs either with or without
an imposed magnetic field present. (b) In the closed-loop configuration the nitrogen and mercury were
separated at the outlet of the channel (existing at atmospheric conditions) and the mercury was fed back
around to the inlet of the channel, with the aid of two check valves, in a manner reminiscentof a reciprocating
engine. A common feature of the closed-loop experiments was that voltage measurement were always taken
from the flow passing through magnetized section of the channel. The closed-loop experiments provided
aggregated measurements of slug flows that were often very periodic, allowing us to analyze the effect that
changing a single parameterhad on the system.
sented difficulty and required significant data analysis, particularly when a train of multiple slugs
passed through the channel. Voltage measurements under different loading conditions were used
to examine the IV-characteristic of the channel, allowing an indirect means for measuring current.
One of the more difficult aspects common to all performed experiments was the inability to accurately measure the pressure drop along the channel. What we were left with was the need to
correlate velocity, voltage and resistance in such a way as to gain insight into the validity of the
well-developed MHD model for the flows of interest.
81
5.1
Devices and Methods
5.1.1
The Magnetic Circuit
Figure 5.2: This magnetic circuitwas constructedout of supermendurand NdFeB magnets. The field lines
were compressed to the point of saturationthrough the decreasingarea between the magnets and the gap in
the center. Since the material on either side of the gap was at saturation, the field lines were uniform and
parallelacross the gap and outside the magneticfield fell off quickly.
Each of the voltage-measuring experiments used the same magnetic circuit. The strength of
the imposed magnetic field BO was measured with a magnetometer to be 1.4 T. To maximize the
flux through the channel with only permanent magnets, the circuit shown in figure 5.2 was used
to concentrate the field lines of four square NdFeB magnets, 1 in on a side and 1/2 in thick. The
circuit itself is machined out of 1 in thick plates of supermendur, an iron-cobalt-vanadium alloy
chosen for its high saturation, permeability and flux density at saturation [Gol99].
82
5.1.2
Flow Rate Regulation and Measurement
The supply reservoir depicted in figure 4.4 was used in each experiment to ensure known inflow
conditions. Airflow restrictions discussed in section 4.1.2 and shown in figure 4.7 were implemented for a variety of reasons. The surface tension of mercury prevented it from back-flowing
without enough force to overcome the capillary pressure head. More importantly, it made for
far more repeatable flow conditions. As discussed further in section 5.1.3, the outlet for the nitrogen was designed to present little opposition to flow so that the restriction was the dominant
bottleneck. When an unobstructed path between the throat and outlet was present (i.e. the inlet
and outlet were "shorted"), the pressure along that path was approximately atmospheric. Secondly, the restriction added stiffness to the slug trajectories so that their motion was constrained
in both the positive and negative directions. The result was that we were able to design into our
system a target slug velocity that was fast but not so fast as to result in an intolerable frequency
of slug breakup. Table 5.1 describes the maximum steady-state velocities imposed by the three
different sized throats used in our experiments for each of two experimentally-relevant channel
geometries. The nitrogen mass flow rates that led to the values in table 5.1 were provided by
the adiabatic isentropic equations for non-choked compressible flow given in (4.1). The density
used to determine volumetric flow rate and velocity2 followed from an assumption that the flow
could be modeled isothermally at room temperature. The maxima 3 occurred when the outlet of
the throat was identically at atmospheric conditions.
Flow Rate Measurements
All of the experiments were highly sensitive to measurement error of inlet throat cross-sectional
area A, and so it was important to verify both that the throats looked as expected and also that
the expected flow for various pressures matched with observed data. To detect errors in modeled
flow rate to 1 part in 100 at 0.5 PSIG, the measurement could not disrupt the pressure at the
outlet by more than ±100 Pa ~1
cm H 2 0. The measurements were performed by displacing
water in a large vessel (as depicted in figure 5.3) and logging the the displaced mass to a file. The
2
The velocity given assumes that the volumetric flow rate of the gas was much larger than that of the liquid metal.
Higher velocities did occur but they were necessarily transient.
3
83
Geometry
circular
D = 3/64 in
Throat Diameter
Inlet Pressure
Max Velocity
(,Pm)
75.6
(PSIG)
3.0
5.0
7.0
3.0
5.0
7.0
3.0
5.0
7.0
3.0
5.0
7.0
3.0
5.0
7.0
3.0
5.0
7.0
(m/s)
0.76
0.97
1.15
0.92
1.18
1.39
1.05
1.35
1.59
0.33
0.43
0.51
0.41
0.52
0.62
0.46
0.60
0.70
83.4
89.0
square
W, H = 1/16 in
75.6
83.4
89.0
Table 5.1: The steady-state velocities imposed by each inlet restriction on the] luid flows through either a
3/64 in diameter circularchannel or through a square channel 1/16 in on a side.
hydrostatic pressures were carefully balanced and the 25 cm diameter vessel had sufficient crosssection to allow up to 500 mL displacements without exceeding the tolerance requirements. The
depth of focus of the laser ablation system was much shorter than the thickness of the restriction
substrate material and the orifice aspect ratios were approximately 5:1. A taper was clearly visible
under an optical microscope. In addition to imperfect knowledge of the diameter, the throat had
an unknown quality factor describing its deviation from ideal isentropic/adiabatic predictions.
Performing displacement measurements over a range of pressures, the "effective" cross-sectional
areas were experimentally found for which the restrictions closely fit the isentropic/adiabatic flow
model. The throat diameters listed in table 5.1 reflect these empirically determined effective areas
and will simply be treated as the actual physical dimensions for the remainder of this chapter as
well in discussions of throat selection in chapter 6.
84
QH 2O
=
QN2
Figure 5.3: Measuring volumetric flow rate at atmospheric conditions via water displacement to avoid
introducingsignificant back pressure.
5.1.3
Fluid Component Separation
An invaluable feature of the systems presented in this thesis, the liquid metal slugs and expanding
gas can easily be separated using the large surface forces, thus enabling closed-loop experimental
operation. Sintered stainless steel filters with a pore size of 2 microns and thickness of 1/ 16 in were
used. Open area considerations did not pose a design constraint and were tested using the same
displacement setup used for measuring the inlet. The nitrogen flow through the sintered metal
was not modeled well by Darcy's law nor using an adiabatic flow model. Further analysis would
be inconsequential-the resistance to flow was dominated to such a degree by the restriction at
the inlet that the pressure at the outlet could always be well approximated as atmospheric 4 . The
analog to this invariance was the independence of the region upstream of the inlet restriction to
the conditions downstream (see section 4.2.1).
In order to maximize the area of the filter that was exposed to the flow, a 3/8 in diameter by
3/64 in deep volume was removed directly beneath it. In closed-loop configurations the mercury
4
Based on measurements performed during the course of the experiments presented in section 5.5 (including
measurements of the flow rate versus pressure drop across the outlet) nitrogen flowing from 7.76 PSIG to atmo-
spheric through the 83.4 prm diameter restriction connected in series with the outlet would result in a pressure of only
0.0054 PSIG (assuming isothermal equilibrium) in the chamber separating the two flow constraining elements.
85
(b)
(a)
Figure 5.4: The device used to separate the nitrogen from the liquid metal is shown in (a) along with a
cut-away view in (b).
seemed to slightly favor this volume (probably as a minimization of surface curvature). Soon
after nitrogen began flowing into the channel, the bead of mercury next to the outlet could be
seen to pulse occasionally. After a few minutes this beating became regular. Figure 5.5 shows
a highly regular slug train over the course of 25 seconds. While the observable beating in the
outlet chamber had advantages when gathering data about average slug behavior, the channel in
chapter 6 has a uniform cross-section through the component separation portion to better facilitate
momentum transfer as the incoming slugs decelerate.
(Volts)
~I'~
0.002
0
______
to
t
(Sec)
is
20
25
Figure 5.5: Voltage traces of a quasi-periodicslug flow and the correlatedbeating at the outlet suggests a
strong relationshipbetween theflow into the separationregion and the dynamics of slugformation.
86
5.1.4
Electronic Position Sensing at the Inlet Junction
Common Electrode
V3
Capped Fill
Port
N 2 + Hg
Figure 5.6: The junction where nitrogen was introduced into a column of mercury was monitoredfor times
when the liquid metal closed the connection between one of the four syringe needle hubs and the common
electrode at the center of the junction.
The conductivity of mercury allowed electronic slug detection by switching based on the existence of mercury circuit connecting two nearby leads. The proximity of the magnetic field to
these leads might have affected the acquired signals but the resistance involved was too large for
the external circuit to have any influence on the flow itself. A supply voltage was applied to the
common lead centered at the intersection and a circuit monitored the voltages at each of the four
stainless steel syringe hubs, each offset from the common electrode by a distance of precisely
djxn = 6.35 mm.
The switched signals were multiplexed into a single voltage that was logged by the same scope
used to collect the terminal voltage traces. One of the four sides was used as the liquid metal fill
port and consequently did not see a signal during operation. Of the eight remaining binary states
only five were seen with any regularity, including the zero state in which all connections remained
open. Figure 5.7 shows the observed states and a sketch to illustrate the (de)multiplexing process.
87
11
131
1
(b) S 1 A S 3
(a) Si
,,3
(c) S A S2 A S 3
(d) S3
t
1
-
1.
or2
S
S3
(e) NIL
2
J1~
J~
1
(f) Demultiplexing Process
Figure 5.7: The various situationsthat could occur within the inlet junction along with the conceptual idea
behind junction signal multiplexing.
88
5.2
Voltage Measurements and Noise
Having a coherent time base to relate terminal voltages with point probes at known locations was
invaluable. Analysis of low-voltage and highly dynamic signals amidst significant noise can easily
lead to confusion and having the certainty of binary switch data should be a first consideration in
any future work with small-scale magnetohydrodynamic channels. The analysis of the voltages
generated by a square channel in section 5.5 makes heavy use of the data from the switches and
is successfully able to show agreement between the unsteady annular flow model of chapter 4
and the times during which terminal voltages were observed. This agreement depends upon
electromagnetic effects only as a means to detect position from the intervals where a nonzero
terminal signal was observed and not on the correctness MHD model itself.
Future research would do well to anticipate some of the various sources of signal noise we
encountered. The low voltage terminal signals are particularly sensitive to noise. The unshielded
column of mercury acted as an antenna when it first came in contact with the switches, adding
noise to the common ground of the oscilloscope that was also used to probe the terminal voltage.
The tube containing the incoming column of liquid metal should be shielded from environmental
noise. Either differential probes should be used to measure the terminal voltage or an isolated
power supply should be used to drive the inlet junction circuitry Large resistors should be attached between the individual terminal/junction electrodes and a common ground to prevent
charge accumulation. Furthermore, in closed-loop configurations a high-resistance path to this
same ground should also be provided for the liquid metal return line. Care should be taken in the
design of these grounding paths to prevent noise from being picked up by the resulting ground
loops. The consequence of poor grounding is clear in the noisy terminal voltage traces shown
in section 5.5.3. This noise entered before the liquid metal came into contact with the terminal
electrodes. The onset occurred just prior to observing a multiplexed junction signal when the incoming liquid metal first contacted the upstream lead (V1 in figure 5.6) of the junction but before
it contacted the common supply lead at the junction's center. These outer leads that connected
to the 12.7 mm stainless steel syringe hubs provided a path to ground and so the signal noise
entered through the oscilloscope's common ground when the column first came into contact with
89
the stainless steel, 19.05 mm upstream from the center of the junction.
5.3
Single Slugs Without Magnetic Fields
In each experiment a single slug of mercury was first preloaded into the 150 mm long cylindrical polycarbonate channel with diameter 1.19 mm (3/64 in) illustrated in figure 5.8. The valve
between the isothermal reservoir described in section 4.1.1 and the channel was opened at time
t = 0 and a Phantom v5 camera was triggered to begin recording the trajectory of the slug with
a sampling rate of 1 ms and resolution of 1024 x 1024. The outlet of the channel was assumed to
exist isothermally at room temperature and pressure. No magnetic field was applied and the view
of the channel was unobstructed.
Hg
Polycarbonate
Hg + N 2
-
I/
-
'Electrodes'
I-----------*N2
Figure 5.8: This circularpolycarbonatechannel allowed direct observation of slug trajectories.
The goal of this experiment was to determine how well the slug model of chapter 4 performed
as a predictor of unsteady slug trajectories. Many of the early experiments did not include im90
age acquisition data. Often they obtained promising voltage traces that were nearly impossible
to correlate with other important statistics like velocity. The unsteady annular flow model is able
to take a limited number of discrete measurements such as multiplexed switch data and various
supply pressures, and predict the resulting slug trajectories accurately. Of the four experimental
results provided, three demonstrated substantial differences in the characteristic scales of the liquid metal with little deviation in the optimal ratio a* of the slug to channel radius. A standard
greedy algorithm was used to determine a* by maximizing the fit to the data. The fourth result
(figure 5.12) showed some oscillatory dynamics that prevented a good fit between the model and
data. The value for a* found algorithmically suggested a Reynolds number in the annular region
that was larger than unity, indicating perhaps that the assumptions of lubricated flow were not
entirely valid. In many later attempts to fit the annular flow model to experimental data involving long slugs, the value a* ~~0.9991 was found to be a good estimate and was subsequently used
to model slugs that were not observed under the camera.
An important observation evident in figures 5.9-5.12 that plays a central role in the results of
section 5.5 is that estimates of velocity found by dividing total distance by total time can greatly
underestimate the actual velocity at various points of interest. For instance, recording the times
when the leading edge of a slug passed through two different locations (separated by a known
distance) would not typically lead to a reliable estimation of the velocity at the second location
unless the distance and delay between the measurement points were small.
91
0.15
..... ux0
(t)
[observed]
.u...'xl(t)
0.12
--
[observed]
x0(t)
xl(t)
[modeled]
[modeled]
0.09
0.06
4-
0.03
0
0 . 75
U)
uum.wuv(t)
[distance/time]
-v
v(t)
-----v(t)
[modeled]
[observed]
0 .5
. 4J
0 . 25n
0
1-
-
Pl(t)
[modeled]
0.75
0.5
0.25
00
t
Supply pressure:
Slug length:
Inlet diameter:
Channel diameter:
a*:
0.3
0.2
0.1
(seconds)
1.04 PSIG
25.25 mm
89 urn
1.19 mm
0.9991
Reynolds number [Hg]:
Weber number [Hg]:
Reynolds number [N2]:
Mach number [N2]:
RMS modeling error [xo]:
RMS modeling error [x1]:
6852
7.5
0.0233
0.000943
1.5768 mm
1.7341 mm
Figure 5.9: The annularflow model provided a good datafitfor long slugs at moderate liquid metal Reynolds
numbers. Applying the model required that the lubrication approximation held and that the flow could be
consideredincompressible. The resulting trajectory confirmed that the Reynolds and Mach numbers for the
nitrogen were much less than unity. Note the strictly positivegauge pressure.
92
0.15
======'xO(t)
[observed]
Em===='xl(t)
[observed]
0.12
-
*
x0(t)
[modeled]
x(t()
[modeled]
0.09
0.06
0 . 03
0
1.25
======v(t)
-----
1
U1
.4.
[distance/time]
v(t)
[modeled]
v(t)
[observed]
0 75
0.5
0.25
0
1.25
-
2P(t)
[modeled]
H
0.75
0.5
0.25
0E
0
t
Supply pressure:
Slug length:
Inlet diameter:
Channel diameter:
a*:
0.1
(seconds)
2.15 PSIG
20.5 mm
89 um
1.19 mm
0.9994
Reynolds number [Hg]:
Weber number [Hg]:
Reynolds number [N2]:
Mach number [N2]:
RMS modeling error [xo]:
RMS modeling error [x1 ]:
10890
18.93
0.02484
0.0015
1.0087 mm
2.4146 mm
Figure 5.10: Increasing the pressure led to aflow with a much higher Reynolds number. The priors of the
annularflow model were satisfied and the model provided a good fit to the data.
93
0.15
=m====xO(t)
======'xl(t)
0.12
-----
x(t)
x(t)
[observed]
[observed]
[modeled]
[modeled]
0.09
x
0.06
0.03
0
1.25
======v(t)
[distance/time]
-v(t)
[modeled]
[observed]
v(t)
1
~0.
75
0 .5
0.250
1-
-
Pl(t)
[modeled]
0.75
H
cn
04
0.5
.I.J
'-4
04
0.25
0t
Supply pressure:
Slug length:
Inlet diameter:
Channel diameter:
a*:
0.2
0.1
(seconds)
2.15 PSIG
12.13 mm
89 um
1.19 mm
0.99945
Reynolds number [Hg]:
Weber number [Hg]:
Reynolds number [N2]:
Mach number [N2]:
RMS modeling error [xo]:
I RMS modeling error [xi]:
12135
23.5
0.02525
0.00167
2.5571 mm
0.858 mm
Figure 5.11: A shorter slug under identical conditions to those in 5.10 showed that the model could still
provide significant insight even when the Reynolds number of the liquid metal became quite large. The
substantialWeber number suggests that the balance between surface tension and inertialforces is not itself
sufficient to predict slug breakup.
94
0.15
0. 12
9.u....xO(t)
(observed]
===U==Ix1(t)
[observed]
-
-
x(t)
xl(t)
[modeled]
[modeled]
,,0.09
0.06
0.03
0
0.75
====v(t)
-v
[distance/time]
v(t)
[modeled]
v(t)
[observed]
0.5
>0
25
0
0.5
-
CO
-P1(t)
[modeled]
0.25
4
'.4
0
-0.25 -
0
0.1
t
Supply pressure:
Slug length:
Inlet diameter:
Channel diameter:
a*:
0.2
(seconds)
0.3
1.07 PSIG
7.67 mm
76 um
1.19 mm
0.959
Reynolds number [Hg]:
Weber number [Hg]:
Reynolds number [N2]:
Mach number [N2]:
RMS modeling error [xo]:
6533.96
7.1
3.2347
0.002875
2.861 mm
RMS modeling error [xl]:
2.830 mm
Figure 5.12: The inlet CSA was reduced along with the pressure drop. A short slug with a Reynolds
number well below those in figures 5.10 and 5.11 exhibited behavior that could not be accountedfor by the
annularslug model. The best fit resulted in a nitrogenflow with a Reynolds number that was no longer
insignificant,violating the priors of the annularflow model. The oscillations also violated assumptions of
section 4.1.2
95
5.4
The Effect of Load Resistance for a Circular Channel
Figure 5.13: The electrodes of this 3/64 in diameter circularchannel come into contact with the channelfor
only 1/16 in along the axial direction.
The 200 mm long channel shown in figure 5.13 was fabricated by mirror hemispherical cuts
into the faces of two 1/16 in sheets of polycarbonate with a 3/64 in ball-end mill bit. The sheets
were face-bonded together with an acrylic/polycarbonate glue. Guide marks (also used as glue
points) were drilled every 5 mm along the channel and axial length Le = 1/16 in pockets were
cut into each sheet to a depth of 1/64 in to allow the post-bonding insertion of the electrodes.
Electronic-grade copper electrodes were machined separately and faced with a 3/64 in ball-end
bit to allow a coradial fit with the channel over an angular extent of 0e = 41.80, as diagrammed
by the cross-section in figure 5.14. The surfaces were electroplated with a thin layer of nickel to
reduce amalgamation.
Dh
Figure 5.14: A cross-section of the channel between the electrodes. The channel has diameter Dh = 3/64 in
and the electrodes had a height of he = 1/32 in that resulted in an angularextent of ±Oe = 41.8' on either
side (off of the horizontal axis) where the channel wall was conductive.
96
5.4.1
Experimental Setup
Wire Mount Point
1-100 mA Shunt
(Resistor)
Figure 5.15: A diagram of the circular channel that was used to explore the effects that varying the load
resistance had on the electrical characteristicsof the device. The thick electrode clamps were designed to
minimize unmeasuredresistances.
The channel was placed flat within the magnetic circuit so that the region containing the electrodes experienced a uniform 1.4 T field. The copper rails on either side were 1/16 in thick by
1/2 in wide and were attached to copper clamps as shown in figure 5.15. Shunts with resistances 3.3, 5 and 100 mQ were affixed between the electrode clamps at different times within the
experiment and the resulting voltages were compared. Determining the fit of the measured to
predicted IV-characteristic was an instance where it was desirable to obtain aggregate information from highly similar trials designed to reduce the number of degrees of freedom that could
have unintentionally influenced the results. Attempting to correlate voltage measurements with
load resistance for two vastly different trajectories would have required filtering out the effects of
mass and volume to relate the voltage directly to the resistance. To produce ensembles of similar
slugs for Re = 3.3, 5 and 100 mQ that differed only by load resistance, the channel was run in a
closed-loop configuration (see figure 5.1b) where the liquid was passively brought from the outlet
of the separator back to the location where nitrogen was injected into the channel. The mechanism
was a series of check valves and pressure vessels designed to supply mercury when the pressure
in the channel dropped. This decrease in pressure occurred when the trailing edge of a slug passed
the outlet, thus allowing gas to freely exit the system.
97
The downside of the aggregated measurement scheme was that the pressure drop became far
more uncontrollable and unobservable when it was made to depend on the coupling between adjacent slugs in a chaotic and dynamic closed-loop system. Concerns over unmodeled states were
significant but only after neglecting the far more glaring inconsistency: how could any knowledge
be gained through the application of a steady well-developed flow model to slugs that accelerated
at more than 20 m/ s2 to Reynolds numbers over 15000? Were this not enough, image acquisition
also was infeasible with the magnetic circuit obscuring the view at the exact location of interest.
Nonetheless, the prediction of the IV-characteristic was determined empirically to be within a
margin of error under 0.5% through a similarity argument presented in section 5.4.2 that decouples velocity and pressure from the relation between the operating points. In the experiment, the
terminal voltage of the channel was monitored for around 10 minutes with each of the three load
resistances. The pressure remained unchanged and we were careful not to disturb the channel
while the shunts were changed. An amplifier near the electrodes amplified the voltage by a factor
of 100. This gain has been divided out in the results and voltage traces that follow.
5.4.2
Correlation of Simulation with Experimental Results
The effect of varying the resistance in the experiment was unmistakable (figures 5.16-5.18). Each
signal trace contained a large amount of information about the channel itself and confirmed many
qualitative hypotheses. For instance, the spikes seen at the beginning of each signal were due
to the development of the electric field upon entering the magnetized region but before coming
in contact with the electrodes. The surface voltage would then be on a similar order as the open
circuit voltage5 . The substantial dynamic behavior at the front of each slug is most likely due to the
method of channel construction: the electrodes were machined separately and inserted after facebonding the polycarbonate, leading to sharp edges at the electrode boundary. Combined with the
step function in impedance as the slugs entered between the electrodes and the spring-like effect
of surface tension, the observed ringing was not surprising.
5
The boundary conditions at the electrode surfaces would change to those for perfectly insulating walls, varying
the resulting voltage a small amount (confirmed by numerical simulations).
98
Mean voltage (N = 12)
Standard deviation
Average peak voltage
0.24065 mV
0.10695 mV
0.46375 mV
Vt (=V)
0.550
0.350
0.150
-0.050
-
-0.001
0.000
0.001
0.002
t
0.003
0.004
0.005
0.006
0.007
(seconds)
Figure 5.16: A collection of tracesfor Re = 100.0 mQ. (N = 4)
Mean voltage (N = 12)
Standard deviation
Average peak voltage
0.09024 mV
0.02904 mV
0.19316 mV
Vt (mV)
0. 550
0.350
0.150
-0. 050
-
-0.001
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
t (seconde)
Figure 5.17: A collection of tracesfor Rj = 5.0 mQ. (N
99
=
5)
0.06592mV
0.02209 mV
0.14625 mV
Mean voltage (N = 11)
Standard deviation
Average peak voltage
-F0053
-F0055
Vt (MV)
-
-
0.550
wmmAverage
0.350
0.150
-0.050
-0.001
0.000
0.001
0.002
t
0.003
0.004
0.005
0.006
0.007
(seconds)
Figure 5.18: A collection of tracesfor Re = 3.3 mQ. (N = 3)
Voltage and current were predicted to be both linear in velocity and pressure drop. Having measurements of neither velocity nor pressure we had to express the IV-characteristic independently of these unknowns. The region over which the electrodes contacted the channel was
insignificant compared to the overall channel length and so the MHD effects on the fluid flow
could be neglected when considering the macroscopic behavior of the entire system. A reason-
able assumption could then be made that upon first contacting the electrodes a randomly chosen
slug would have, on expectation, the same length, velocity and pressure drop for each of the
three resistances. Once in contact with the electrodes the slug would begin to decelerate at a
rate dependent on the resistance and correlated with decreases in voltage from its peak. In the
limit, the average of all voltage peaks for each resistance could be approximated as the result of
sending the exact same slug through the channel under each of the three resistances (though average length, velocity and pressure drop remained unknown). Equation (2.19a) can be rewritten
as
/
e= (1 + Vtoc/IscR)Y
1
where Vt/Voc and Vtc/Ic are each independent of the velocity
and pressure drop. Furthermore, given that the diameter of the channel was 75% of the length
of the electrodes, most slugs moving down the channel were much longer than the electrodes
themselves and their internal resistance was well-approximated by a slug the exact length of the
100
electrodes. Simulation was used to predict the unitless value Vt/V
associated with each of the
three resistors.
Re
/Vtoc
3.3mQ
5mG
100mQ
0.2945575
0.3874994
0.9267562
Tabulated in 5.2, the ratio of each pair of predicted values (where
Koc cancels
out) compared fa-
vorably to the corresponding ratio of averaged peak values from the experiment. A semilog-scale
box-plot of the peaks with lines connecting their averaged values is shown in figure 5.19. Overall, the experiment provides considerable credibility that the well-developed flow approximation
can accurately predict macroscopic properties related to the IV-characteristic even outside the laminarflow regime. More concretely, the value Rt
Vt /Isc is accurately predicted by the steady
well-developed flow model.
0.5
0.4-
0.3-
, (mV)
0.2
0.1
1
.1
10
50
100
R, (mn)
Figure 5.19: The semilog-scale box-plot describing the experimentally derived peak voltage distributionfor
various load resistances agrees convincingly with the theoreticalIV-characteristicpredictions of the welldeveloped flow model presented in chapter 2.
Vt(3.3 mQ) / 1(5 mQ)
Vt(3.3mQ) / Vt(100mQ)
Vt(5 mQ) / Vt(100 m))
Modeled
0.759447
Measured
0.757144
Relative Modeling Error
-0.304%
0.315839
0.415881
0.315364
0.416518
-0.149%
0.154%
Table 5.2: Comparingresultsfrom the numericallyderived IV-characteristicand correspondingexperimental data shows agreement to within ± 0.5%.
101
5.5
Voltage Versus Velocity for a Square Channel
The experiment presented here shared many similarities with the previous setup used to examine
the IV-characteristic. The system was again run in the closed-loop configuration with a constant
applied pressure of 7.76 PSIG. Aggregate measurements were taken in an unsuccessful but informative attempt to experimentally determine the relationship between open circuit velocity and
voltage. The short length and large 2.52 mm 2 square cross-section of the channel shown in figure 5.20 provided a strong signal that did not require amplification. Insufficient viewing area
prevented image acquisition but time-synced data from the inlet junction shown in figure 5.6
provided sufficient trajectory information. The volumetric displacement methods of section 5.1.2
were used to continuously track the average nitrogen flow rate.
Figure 5.20: The placement of the channel within the magnetized region is shown here without the upper
portion of the magnetic circuit. The cross-section was square with an edge length of 1.5875 mm. The
electrodes extended for 12.7 mm in the axial direction. The circular potion of the channel on either side
consisted of machined polycarbonatechannels, syringe needle hubs and tubing. The section upstream of
the square channel had an average CSA of 1.221 mm 2 and the section downstream an average CSA of
1.255 mm 2 . The CSA of the square channel was 2.520 mm 2 and so conservation implies that eitherflow
separationmust have occurredfollowing the abruptarea change or the liquid metal must have slowed down
by a factor of two as the slugs entered the square region.
102
Unlike the experimental correlation between the predicted and measured IV-characteristic, the
measurement quality of voltage versus velocity depended upon the ability to accurately model
slug trajectories to fill in the gaps between observable data points and the actual behavior of the
system. Applying the model from chapter 4 along with laminar flow assumptions in regions of
low Reynolds numbers (i.e. the return path from the separator to the inlet junction) led to numerical results that correlated almost perfectly with the available data. A picture of the experiment is
shown in figure 5.21 with its high-level functional description provided by figure 5.1b.
Nitrogen supplied through an inlet restriction with a throat diameter of 83.4 pm was introduced into the loop at the multiplexing inlet junction described in section 5.1.4. The junction is
visible in the the upper-left quadrant of figure 5.21. Slugs of mercury were propelled down the
channel to the separator, passing through the MHD region where open-circuit voltage traces were
taken. The nitrogen exited the loop and the liquid metal flow was brought back around to the
inlet through its substantial momentum and the large pressure forces that would build when the
nitrogen outlet was blocked.
103
*
*
,
,
,o
Figure 5.21: The picture of the closed-loop configuration correspondsdirectly to the block diagram in figure 5.1b. The pressure vessel (a.k.a. the "expansion tank") is just visible in the upper right (a diagram is
provided in figure 5.34). It was connected through a 508 mm tube to the T-junction which included the
check valves used to enforce forwardflow (defined in the counterclockwise direction). The tube connecting the separatorto the T-junction and the tube connecting the T-junction to the inlet junction were each
127 mm long. These lengths include all stainless steel syringe ports and the distancesfrom the center of the
T-junction to the check valve on either side. The CSA of the tubing was 1.267 mm 2 . Not pictured here,
the air restriction was connected by a 381 mm long tube connected to the center of the inlet junction. This
created a 0.4286 mL volume in which nitrogen could expand and contract. The channel length from the
center of the inlet junction to the upstream edge of the MHD terminals was 151 mm and had an average
CSA of 1.221 mm 2 . The distancefrom the downstream edge of the terminals to the separatorwas 76.2 mm
with an average CSA of 1.255 mm 2 . These exact dimensions were used for the analyses that follow in the
remainderof this chapter.
104
Scope data like that shown in in figure 5.22 was processed to find the average voltage of each
individual slug that passed between the electrodes. Restricting the voltage sampling to the times
when slugs were between the electrodes, the average voltage over the course of six such traces
taken in quick succession was found to be Voe = 5.015 mV. The histogram of the time-averaged
voltage for each individual slug is provided in figure 5.23.
DATA0080
0.06
0.04
0.02
43
-0.02 -
-0.04
-0.06
0
1
2
3
time
4
(s)
5
6
7
Figure 5.22: A trace of the open-circuitvoltage as a train of slugs passed between the electrodes.
12
10
8
~44
6
0
4
2
0L
0
0.01
0.005
mean voltage (V)
0.015
Figure 5.23: A histogram of the average voltagegenerated by each slug, taken over 42 seconds.
105
DATA0080
0.3
0.25
0.2
Vt
-1Integral of Vt
0.15
0.1.4J
0.050
,- 40
-0.05
-0.11
0
1
2
3
time
4
5
6
7
(s)
Figure 5.24: The integratedterminal voltage, scaledand shifted arbitrarilyto overlay figure 5.22, provided
cleardata on the start/finishof each individual slug's trace.
As evident in figure 5.24, the time integral of voltage suppressed the AC noise and was far
more informative in determining the start/finish of the DC component corresponding to each
slug. Both the original signal and it's integral could then be compared to the switch data from the
junction in an attempt to discern velocity. Figure 5.25 shows the overlay of the switch data on top
of the signal over the course of a seven second oscilloscope acquisition.
DATA0080
0.3
0.250.2
0.15>
0.1-
4.'
0.050
-0.05-0.1
0
1
2
3
time
4
5
6
7
(s)
Figure 5.25: The multiplexed switch data is included, arbitrarilyscaled and shifted to overlay with V(t).
106
The sequence of slugs clearly exhibited a quasi-periodic behavior with a period of around 1
second. Despite the apparent jitter and irregularity, many of the small-signal characteristics were
surprisingly similar across the sample. For instance, the delay between the rising edge of the
switch signal to the rising edge of the integrated signal was highly regular. This would seem to
suggest that the velocities upon contacting the electrodes were also regular.
35
30
25
20
4
0
15
10
5
00
-
U.Z
0.4
delay
0.6
(s)
>
. I
0.8
L
1
Figure 5.26: The histogram of the time delays between slugs entering the junction and contacting the
electrodes.
107
5.5.1
Predictions from the IV-Characteristic
Applying the results of section 5.4, the ratio of Vt,/I 8
c
was taken to be the numerically obtained
value 1.7875 mQ and the open circuit voltage was taken to be the experimentally determined average Vtc = 5.015 mV. Applying (2.19a-2.19b), the expectations for voltage, current and electrical
power are given in terms of the load resistance by
Re -5.015 mV
1.788 mQ + Re
-
Pelec
5.015 mV
1.788 mQ + Re
Rj. 25.150 mV 2
22
(1.788 mg + Re)
and the "power-maximal" operating point is
-
1.788mQ
Vt - 2.507mV
I = 1.403 A
Pt c = 3.517mW
el ec
The reference to this maximal operating point is somewhat misleading as there are clearly
second-order effects that come into play in this more complex system. Whereas the ratio Vc/Ic
was independent of both velocity and pressure drop, Vtic itself was not. Applying a finite load
resistance would lead to a conversion of kinetic to electrical energy affecting the relationship between velocity and pressure as described by (2.25a). The consequences would also have been felt
by the remainder of the system. To a first order approximation, the decreased velocity of the slug
through the magnetized region would result in a higher pressure drop across the slug due to the
increased fill time over which nitrogen was flowing in through the throat. In this sense it follows
that more power could in fact have been produced than suggested by the "power-maximal" op108
erating point that ignored the remainder of the system. It is alternatively possible that the overall
behavior of the complex system would instead have been affected adversely in some unforeseen
way through the perturbation of its equilibrium.
5.5.2
Open Circuit Velocity and Voltage: Prediction vs. Observation
Similar results can be found for the operating point that maximized conversion efficiency if the
calculated internal resistance R, was either demonstrated or assumed to accurately reflect the actual resistance seen by the electrodes in the absence of an applied magnetic field. The steady
well-developed flow model would predict that the load resistance R, and optimal efficiency * of
this operating point, in contrast, were independent of the velocity and pressure drop. Unfortunately, experimental confirmation of the actual efficiency remains elusive without knowledge of
the open circuit velocity.
It seems hard to believe that an experimental system built for the laboratory bench and designed to observe the behavior of slugs could have generated this much power during the intervals
when slugs were between the electrodes. Absolutely no effort was put into optimization and the
electrodes only covered a small fraction of the overall channel. Furthermore, the application of the
steady MHD model to such large voltages would result in liquid metal flow rates that seem impossibly large. Deviations from the steady well-developed model in an unsteady turbulent slug flow
could certainly prevent an accurate estimation of Uc. In fact, this experiment brings into question
one of the most believable and straightforward conclusions of the steady well-developed MHD
model. From (2.16) we see that the expected open-circuit velocity should be given by
Uoc -
WBO
2.256 m/s
-=*o
(5.1)
Confirming or rejecting this relationship requires knowledge of the open-circuit velocity. The
estimation of Uoc will be the focus of the remainder of this chapter. A cursory analysis indicates
that it is unlikely that slugs could have regularly attained velocities far exceeding 0.6 m/s at the
point of electrode contact (see table 5.1 for a throat diameter of 83.4 pm). On the other hand, the
failure of (2.16) would seem equally unlikely even for an unsteady turbulent pipe flow, so long as
109
the magnetic Reynolds number was small 6 . By a simple order of magnitude argument,
[Vtoc
(v,, xB,) - 2dz
=
._W/2
=
W F(v0 . - ic)(Bc - y)]
=
WUocBo
(since [B,,] < [By] and [vy] < [vx])
(since By ~ Bo).
6 The magnetic Reynolds number corresponding to 2.256 m/s would be 4.7E-3 implying that diffusion would
dominate the influence of the velocity field in determining the time evolution of the magnetic field [MB01]. The uniform
external field would then imply that [B2] < By ~ Bo
110
5.5.3
Following the Velocity of a Single Slug
DATA0080
0 16
0 14
0 12
.1
0 08
4.)
0 06
0 04
0 02
0
-0 . 02 L
4
4.1
4.2
4.3
time (s)
4.4
4.5
4.6
Figure 5.27: The voltage trace of a single slug is shown along with its integral (tofilter out AC noise) and
the switch data taken as the slug began to traverse the channel. The terminalvoltage is plotted to scale with
the labels of the vertical axis whereas the integratedsignal and switch data are scaled/shifted by arbitrary
amounts. Markers are placed at various times where identifiable events occurred.
The first step is to consider the trace of a single slug in the train, shown in figure 5.27. The
required analysis is a bit tedious but justified by the findings that result. Times
tA
through tF
are markers for various events through the trajectory of the slug, beginning at the junction where
it detached from the incoming column of mercury and ending around the time it entered the
separator.
We begin by enumerating the significance of each marker. There were two possible modes of
operation that are discussed, one of which is shown to have been infeasible. The remaining hypothesis for the qualitative behavior is expounded upon through a straightforward but detailed
numerical model that, when supplied with the actual parameters of the system, agrees convinc111
ingly with the observed data. Equipped with a simulated trajectory and measured mean voltage,
the results can then be compared and contrasted with the predictions of chapter 2.
5.5.4
Markers Describing Slug Behavior
2-
(a) Si
2
2-:
(b) S1 AS
(c) S 3
3
Figure 5.28: Figure5.27 exhibits three nonzero combinations of multiplexed switch values. The encoding
for the binary switch values [Sii is A>i Si/2i where A is some arbitraryvoltage scale. Si = 1 indicates
an inflow of Hg from the pressure vessel and S3 = 1 indicates an outflow of Hgfrom the junction into the
channel.
tA=
4.092 s indicates the instant when the incoming column of mercury from the check valves
first closed the connection between the syringe hub and the electrode at the center of the
junction. This situation is depicted in figure 5.28a and can be considered the approximate
time when the gas flow could no longer freely flow through the junction.
tB =
4.120 s indicates the instant when the column of mercury reached the stainless steel syringe
hub attached to the channel, depicted in figure 5.28b. The distance between the common
electrode and the syringe hub was exactly dx,,
=
6.035 mm and so a good estimate of the
initial velocity through the junction is given by djxn/(t, - tA) = 0.227 m/s.
to = 4.258 s indicates the instant of slug formation where the column of mercury was overcome
by the pressure that had built up inside the blocked inlet chamber, as depicted in figure 5.28c.
The dynamics of slug breakup led to significant variability in this marker across different
slugs. The entrainment of nitrogen was observed, often breaking the slug into multiple
parts. The marker tc is a good indicator of when breakup was occurring but should not be
taken definitively.
112
tD
=
4.290 s indicates the instant when the upstream edge of the slug passed the common electrode. For t > tD the pressure acting on the trailing edge was defined by the control volume
that included both the inlet tube and the portion of the channel preceding the slug. The
pressure was in turn modified by the expanding volume and by the inflow of gas from the
restriction. Neglecting the magnetic field and assuming an unobstructed output for which
the pressure at the leading edge was approximately atmospheric, the subsequent trajectory
was well-modeled by the unsteady annular model of chapter 4. At the open circuit operating
point the opposing Lorentz forces were minimal and the model was expected to still provide
a good fit to the observed data despite the imposed magnetic field.
tE =
4.325 s indicates the moment when the leading edge of the slug contacted the terminal electrodes. The integral of the voltage was less susceptible to noise and more clearly illustrated
the period during which the slug was in contact with the electrodes. A reasonable hypothesis is that the time delay between tA and tE was highly correlated with velocity.
tF
=
4.376 s indicates the instant where either the slug had left the terminal electrodes or its velocity had decreased abruptly to almost zero. The latter of these explanations turns out to
be the more likely. The slug was longer than the distance between the terminals and the
outlet. As a result, it remained in contact with the electrodes as it impacted the downstream
volume of mercury with an impulse that can ultimately be modeled as a simple transfer of
momentum from the slug to the stationary liquid.
5.5.5
Narrowing the Space of Possible Trajectories
In addition to the multiplexed switch data and voltage traces, the recorded average nitrogen flow
rate provides additional information that restricts the space of possible trajectories. The most
important question to resolve is whether or not there was a period of time for each slug where
a direct path from the inlet to the outlet existed and through which nitrogen could freely flow,
unobstructed by liquid metal slugs along the way. More concretely, in case (I) the trailing edge of
the previous slug would have reached the outlet before the leading edge of the current slug was
able to cross and obstruct the inlet junction (e.g. figure 5.28a) thus allowing a nitrogen short-circuit
113
between the inlet and outlet. In case (II) the later slug would have instead passed through the inlet
junction (e.g. figure 5.28b) before the preceding one could move far enough down the channel to
allow nitrogen to freely exit at the separator and the pressure to drop 7.
140
120
100
80
0
60
40
20
0
0
20
40
60
80
100
120
140
160
180
time (s)
Figure 5.29: The displaced volume of nitrogen over the 180 second window taken during the experiment
was highly linear in time, corresponding to a flow rate of 0.7563 mL/s at atmospheric temperature and
pressure.
The net volumetric flow rate of nitrogen was measured at atmospheric conditions using the
displacement technique described in section 5.1.2. It was found to consistently be Qnet = 0.7563 mL /s
over the course of the experiment. The period between the slugs was around 1 second implying
that on average, each slug was accompanied by 0.756 mL of nitrogen, measured upon exiting the
system. The flow rate when the path from inlet to outlet was unobstructed was empirically found
to have attained a steady state value Qshort = 1.632 mL/s. Measurements of the flow rate through
the separator for various pressure drops showed that a fully pressurized channel would evacuate
7
0f interest here are not the small separations between slugs formed by breakup or nitrogen entrainment but rather
the large distances separating the one or more closely spaced groups of slugs.
114
from 7.076 to 0.01 PSIG in just under 0.016 s.
As shown in figure 5.30, the time for the channel to fill was around 0.45 seconds-shorter
than the interval between slugs but far longer than was required for the channel to depressurize.
Had multiple slugs concurrently occupied the channel between the inlet junction and the outlet,
I
I
8 -
-
8 - - - --
-I
2-
- -
17
4
-
----
-
I
-
-~
--
I
X: 0.2665
-I -
Y: 7.76
1
- IY:-
-------
---
-
-
-
X: 0.4424
- Y 7.76
77
+--
L-
VlmofIetScinOly:0.42
- ---- -
o u tle
-r
-- **
3~1
vb
0
-
- - -
n
0
- -T-
-
olume of Inlet Section Only: 0.4826 mL
Teuv Volume of Entire Channel: 0.8036 mL
ea t --------
0.05
0.1
-1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
time (S)
Figure 5.30: Fill curves for the pressure equalizationacross the throat that would occur when a slug blocked
the nitrogenflow between the inlet and the outlet.
a nitrogen short-circuit could not have occurred. Given the 0.45 second fill time and the 1 second
period, the pressure at the trailing edge of each slug just prior to entering the separator would
have been nearly 7.76 PS1G. The absolute maximum amount of pressurized gas that could have
been released as the volume between two slugs within the channel reached the outlet would have
been equal to the volume of the channel between the center of the inlet junction and the separator.
The volume of this channel was 0.321 mL and so had the nitrogen occupying this volume been
at 7.76 PSIG, it would have expanded 0.490 mL at atmospheric temperature /pressure. Since this
quantity is far less than the measured 0.756 mL exiting the system with the passing of each slug we
can conclude that the inlet and outlet must have been short-circuited by an unobstructed nitrogen
path for some nonzero duration between each pair of successive slugs, as in case (1).
115
Observation 4. It may be assumed that the inflowing column of mercury did not obstruct the incoming
nitrogen at any location along the forward path from the inlet junction to the separator until after the
trailingedge of the previous slug hadfirst passed the outlet, allowing nitrogen to escape and the channel to
rapidly approach atmosphericpressure.
As was true for case (II), the entire volume of nitrogen between the inlet junction and the
outlet would leave the channel with each passing slug. As the inlet junction became obstructed
by the inflow of mercury during the formation of the current slug, the smaller volume of the
inlet tube would approach 7.76 PSIG in roughly 0.27 s (see figure 5.30). At the point when the
trailing edge of this same slug passed into the separator the pressure immediately and rapidly fell
toward 0 PSIG and a short-circuited nitrogen flow was created until the following slug obstructed
the inlet junction. Subsequently, the volume of depressurized gas trapped between the inlet and
outlet was then pushed out by the next slug. The volume of the inlet tube was 0.4826 mL and the
total nitrogen flow over the single cycle was a sum of (1) the entire volume of pressurized gas that
initially occupied the channel, (2) the amount of nitrogen that left the inlet as it depressurized to
0 PSIG and (3) the integrated (atmospheric) volumetric flow rate of the short-circuited nitrogen
flow. As was shown above, the volume within the channel accounted for 0.490 mL of atmospheric
nitrogen. The depressurization of the inlet gas added an additional 0.2548 mL of atmospheric
nitrogen. Supposing that the short-circuited path existed for a duration of ot the additional volume
of atmospheric nitrogen to leave the channel was given by 6t -Qshrt. Assuming an average period
of exactly 1 second the overall volumetric flow rate was thus given by
Qnet = 0.7448 mL/s + -
Is
- 1.632 mL/s.
From the measured value of Qnet = 0.7563 mL/s indicated in figure 5.29, the duration of the
short-circuit was predicted to have been around 7.05 ms.
Returning to figure 5.27, the implication is that the upstream edge of the previous slug must
have exited just prior to tA. Furthermore, at the time of slug formation we may assume that the
channel was unobstructed and the leading edge existed at a nearly constant atmospheric pressure.
116
As a consequence of this constant pressure along with the slug's substantial length (~ 11 cm), the
unsteady annular flow model of chapter 4 is expected to provide a reliable means to reconstruct
its trajectory.
5.5.6
Velocity Estimates Derived on the Back of a Napkin
Many first order estimates can be made for the average velocity over an ensemble of slugs using markers similar to those in figure 5.27. Let Uc denote the velocity of a single slug, averaged
over the interval during which it contacted the terminals and let Uc be the average value of U,
across all such slugs. Estimates of the volumetric flow rate and corresponding velocity through the
square portion of the channel are straightforward given the known cross-sections and distances in
space between locations where the markers manifested themselves. Averaging the initial velocities, estimated as
djxn/(tB -
L,
across 59 recorded slugs results in an average velocity at the electrodes of Uoc = 0.1585 m/s-far
less than the velocity required to satisfy equation 5.1 given Voc = 5.015 mV. The distribution of
the estimated value for Uc over the ensemble of slugs is provided in figure 5.31
A more realistic estimate of U0 c can be found if we consider the distance between the junction
and the electrodes divided by the delay between the rising edge of the multiplexed signal and
the time when a voltage was first observed at the electrodes. Again accounting for the differing
CSA, this method provides an estimated average velocity of Uc = 0.3237 m/s that is also well
under the velocity required by 5.1. The distribution of U0 c over the ensemble of slugs is given in
figure 5.32
117
20F
15-
10-
5-
0
0
-
0.2
0.4
0.6
0.8
1
velocity (m/s)
Figure 5.31: The distribution of slug velocities passing between the electrodesfrom an estimate based on
the initial velocity calculatedat the inlet junction.
0.2
0.4
0.6
0.8
velocity (m/s)
Figure 5.32: The distribution of slug velocities passing between the electrodesfrom an estimate that divides
the distancefrom the inlet junction to the upstream edge of the electrodes by the time taken to traverse this
distance.
118
5.5.7
A Comprehensive Model
At this point we will provide a self-consistent hypothesis for the kinetics and gas-dynamics behind the trajectory of the single slug corresponding to figure 5.27 within the quasi-periodic flow.
The system is modeled and numerical solutions examined for insight into the mechanics and periodicity of the flow. The implementation details of the simulation are less interesting than the
resulting description it provides. It is intended that the following formulation provides a conceptual level of detail whereas discussions regarding the numerical methods (performed using
Matlab Simulink®) are avoided almost entirely. The model is quite involved and full of approximations but the resulting trajectory aligns almost exactly with markers
tA
through tF. The main
result is a far more accurate estimate of the slug's velocity as it passes through the MHD region
than those provided in section 5.5.6.
Figure 5.1b contains a block diagram of the system. The flow is assumed periodic and is thus
described best as a boundary value problem where the initial and final state are identical. Finding
a solution requires some trial and error but the result does provide a convincing hypothesis for
the system behavior during the experiment.
The model begins when the previous slug impacts the stationary mercury column at the outlet
separator, imparting a step function in momentum. Conservation of momentum provides the
initial velocity of the combined slug and column at the simulation start. The pressure builds
at its trailing edge and the slug is pushed past the outlet. The pressure in the channel drops
to atmospheric as this same edge enters the separator and the nitrogen is able to freely exit the
channel. The inflow of mercury upstream begins to accelerate. When it passes the inlet junction,
the inflowing column closes off the nitrogen inlet channel which then builds in pressure. Slug
formation occurs and the slug is then modeled using the annular flow model of chapter 4. The
slug passes through the MHD region and when its leading edge enters the outlet separator, the
next cycle of this periodic process begins.
The simulation is split into two very different models and it will be helpful to name these individual components. The FORMATION model begins at the time when the previous slug impacts
the mercury column in the separator and ends with the formation of the next slug at the inlet
119
junction. 2REGION is the familiar two-region annular flow model that begins immediately after
slug formation. The exact time of slug formation is known from the junction switch data and the
slug length is one of the model parameters that we estimate.
Requirements
A reasonable description of the system's behavior before, during, and after the trajectory of a
single slug should agree with the various empirical markers of the recorded junction switch voltage and the temporal endpoints of the terminal voltage trace. The period/duration and average
expelled nitrogen volume per cycle predicted by the numerical model should also agree with
their experimental analogues. Finally, the initial and final conditions on positions, velocities and
pressures should be identical to satisfy the requirements of periodic flow. All together there are
approximately 15 such conditions that must be met and it becomes highly unlikely that a trajectory predicted by the model could satisfy all of these constraints and yet still deviate substantially
from the actual slug's trajectory.
Overview
The initial state of FORMATION coincides with the instant that the previous slug first impacts the
column of mercury at the outlet. The mercury in the return line is assumed stationary at the
time immediately preceding impact (the check valves prevent reverse flow and forward flow is
opposed by the pressure at the inlet). This assumption agrees with empirical data showing the
long duration where slugs did not cross the inlet junction. Conservation of momentum provides
the initial velocity for the single-component return flow from the outlet back to the inlet. Having
slowed substantially, the previous slug obstructs the flow of nitrogen through the outlet and is
consequently pushed further down the channel, both by its own momentum and by the pressure
that builds at its trailing edge. In line with observation 4, the inflowing column of mercury does
not obstruct the nitrogen flow until the trailing edge of the previous slug passes the outlet and
the pressure of the gas drops. With the outlet then unobstructed, the pressure abruptly drops to
under 0.01 PSIG within around 10-20 milliseconds. With the check valves preventing reverse flow
120
and the expansion tank having just undergone a compression following an inflow of mercury, a
large pressure drop results across fluid volume between the expansion tank and the inlet junction.
At this time the incoming column of liquid metal accelerates, passing through the inlet junction
and obstructing the free flow of nitrogen to the outlet. The pressure in the chamber between the
air restriction and junction begins to build from its nearly atmospheric value, impinging upon
the fluid flow until the point when the pressure overcomes the inertial and capillary forces of
the mercury column to form the next slug. The FORMATION model ends and 2REGION begins
with the newly created slug. The state of the system at the conclusion of FORMATION becomes
the initial state for 2REGION. Attaining the same velocity as its predecessor, the slug impacts
the stationary fluid column at the outlet and 2REGION concludes. Having completed the entire
cycle, the simulation ends at the start of the subsequent FORMATION step. Again, for the flow
to be periodic the 2REGION model must end in a state that is identical to the starting state of
FORMATION.
There are a substantial number of unknown parameters, including boundary values for the
pressure throughout the system and even the slug length itself. In contrast, the lengths and crosssectional channel dimensions are known to a relatively high degree of certainty. Finding a set
of values for the unknowns becomes a process of iteration. While the system has many degrees
of freedom, the admissible trajectories in the solution space are all quite similar and so, for the
purposes of describing the relationship between velocity and voltage, non-uniqueness is tolerable. Figure 5.33 shows a block diagram enumerating the various components of the model corresponding to experimental setup shown in figure 5.21.
121
Length: 508.0 mm
CSA: 1.267 mm 2
N 2 Reservoir
N
;Hg
2
I
I
I
Length: 240.0 mm
CSA: 1.304 mm2
+
N2
Figure 5.33: A detailed schematic extending the conceptual system diagram in figure 5.1b to allow an
analysis of an observed quasi-periodicslugflow and resulting voltage trace.
122
J
The Inlet Restriction
Nitrogen from an isothermal reservoir flows through a throat as described in section 4.1.2.
The diameter of the throat 8 is Di, = 83.4 pm.
The Inlet Volume
[
The inlet restriction and inlet junction are connected by a 1.27 mm diameter tube that is
381 mm in length. The pressure gradient within the nitrogen flow in this section is neglected
and the tube is modeled as a simple homogeneous volume of nitrogen (Vi, = 0.483 mL) on
the atmospheric isotherm with pressure pi (t).
The Inlet Junction
F
Slug formation and the start of 2REGION occurs when the inflowing column of mercury
occupies the center of the inlet junction and pi, is sufficiently large to split the column apart.
The information contained within the multiplexed switch voltages is critical to the analysis
of the slug's formation.
The Channel
Nitrogen and slugs of mercury flow from the inlet junction to the separator through a channel that is Lc = 240 mm long with an average cross-sectional area Ac = 1.336 mm 2 . As shown
in figure 5.20, the magnetic circuit surrounds a square polycarbonate channel with terminal
electrodes used to measure the voltage generated by the slugs moving through the MHD region. The "channel" consists of the polycarbonate portion along with the two tubes-one on
either side-that connect the device to the inlet junction and separator. The position along
this channel is denoted by x with x = 0 being the center of the inlet junction and x = 240 mm
the entrance of the separator where nitrogen is able to escape the channel. The CSA of the
square portion of the channel containing the MHD region is W H = 2.52 mm 2 but the channel is approximated globally to have the constant cross-section of area Ac to facilitate the
application of 2REGION.
8
As mentioned in section 5.1.2, "throat diameter" refers to an empirically determined effective diameter.
123
The Separator
The nitrogen encounters a far smaller resistance to flow through the separator than it does
at the inlet restriction (see section 5.1.3). Effectively, if nitrogen is able to flow directly from
the supply reservoir through the channel and out through the separator, the inlet will serve
as a bottleneck that constrains the flow and the pressure within the channel will be nearly
atmospheric.
A-G The Liquid Metal Return Path
The Simulink/Simscape* package is used to model the single-component liquid metal return path that is most applicable during the execution of FORMATION. The model incorporates viscous and inertial effects in the connecting tubes (A, D and G). Viscous and inertial
effects are included in the check valve models along with the cracking pressure, leakage area,
critical Reynolds number, etc. The model includes corner effects in the representation of the
T-junction (C). The expansion tank (E) contains a constant mass of nitrogen that contracts
and expands as mercury flows in and out (see figure 5.34). The volume and pressure of the
nitrogen in this pressure vessel are given by Ve(t) and pe(t). The relationship between Pc
and pm is what ends up determining exactly when slug formation occurs. The initial pressure and volume of the expansion tank are unknown parameters that are resolved through
iterations of FORMATION and 2REGION.
124
Pe(t)i
Ve(t)
Figure 5.34: A diagram of the variable-volume expansion tank. Given the large CSA, the hydrostatic
pressure was well approximatedas a constant bias to the pressure of the gas within the volume.
Boundary Values
Let L represent the length of the periodic/identical slugs that traverse the channel. Denote the
positions of the leading and trailing edge of the next slug to travel down the channel by x 1 (t) and
xo(t) = x1 - L, respectively. Let x'(t) be the location of the previous slug's trailing edge. At the
start of the simulation (t = to) the leading edge of the previous slug is modeled as having just
entered the separator at x = Le and so x' (to) = Lc - L + e (figure 5.35a).
By observation 4, either the pressures' at the inlet and at x' are equal, or x1 > 0 in which
case x
=
Le and the nitrogen volume in front of x1 rapidly expands to atmospheric pressure
(figure 5.35b). A corollary is that if a slug is obstructing the nitrogen flow between the inlet and
outlet (as is always the case during 2REGION) then the pressure at its trailing edge is given by pim.
125
N2
x0
tE
in
X, 0
N2 out
x0 '
L
x 1 = LC
X
L
(a)
N 2 in
tE=tc
N2 out
"=MW, -_
xO=0
...... x..'L
x 1=L
(b)
Figure 5.35: Diagramsshowing (a) the inlet/outletstate at the point where leadingedge of the previous slug
first enters the separatorat t = to and (b) the inlet/outlet state after the trailingedge enters the separator,
the pressure in the channel drops and slug formation occurs.
Unknown System Parameters
There are eight unknowns in the system specification. Recall that the channel dimensions are all
known a priori. The slug length L is the first unknown parameter although the model behavior
does place constraints on its domain. Next is the initial position
x1 (to)
of the incoming slug. By ob-
servation 4 the initial edge location must precede the inlet junction: x1 (to) < 0. As a consequence,
the exact starting time to where the previous slug's leading edge enters the separator is unknown.
Next are the velocity at which the previous slug enters the separator (i.e. when t = to) and the
pressure existing at its trailing edge. Also to be determined at t = to are the initial pressure and
volume of the gas within the the expansion tank (see figure 5.34). The final unknown is the value
for a from the two-region annular flow model of chapter 4.
Iteratively running the simulation, the initial time to is chosen such that xi (4.092 s) = 0 specifically so that the measured value for tA= 4.092s (see figure 5.27) is in exact agreement with the
corresponding time predicted by the simulation. This also has the effect of perfectly aligning the
126
rising edges of both the predicted and actual switch traces at t
From this alignment the remain-
ing numerically-obtained markers can be compared to their experimental equivalents to study the
model's predictive merit.
The marker tB is defined by the constraint xi (tB)
=
0. The estimated value for tB found by
simulation satisfies the same constraint with respect to the numerically derived trajectory. Similarly, the estimated value for tD is the time that satisfies the zero-crossing constraint xo(tD) = 0
for the simulated trajectory. The marker tE corresponds to the time when the leading edge first
contacts the upstream edge of the electrodes: x1 (tE) = 151 mm; tF corresponds to the time when
the leading edge enters the separator: x1(tF) = Lc. Though less important, the estimate for the
marker to corresponds to the time during the simulation when the inlet pressure overcomes local
pressure at x = 0 within the slug.
Parameter Assignments
The values chosen for the unknown system parameters were found by iteration and represent a
solution that, while not optimal, is sufficiently close for our purposes.
127
to = 3.3037 s
L = 110.8mm
The simulation starting time.
The slug length.
zi(to) = -15.2 mm
The initial condition on the position of the next slug's
ledneg.
leading edge.
Ve(to) = 5 mL
The initial volume of nitrogen in the expansion tank.
Pe(to) = 6.2 PSIG
The initial pressure of the nitrogen in the expansion
tank.
pin(to) = 3.395 PSIG
The initial pressure of the nitrogen in the channel
and inlet.
The dimensionless parameter of the annular tworegion flow model of chapter 4.
dx(
dt
The slug velocity just prior to impact with the stationary column of mercury in the separator.
Table 5.3: Assigned values of the unknown parameters used in the numerical simulation.
128
Simulated Slug Trajectory
From the chosen parameters,
xo(to) = -126mm,
x1(to) = -15.2 mm,
z'(to) = 129.2 mm.
Figure 5.36 shows the predicted slug position as it evolves with time along with the predicted
junction switch trace that results. Superimposed on the modeled switch signal are the actual
traces of the terminal and junction switch voltages. The marker locations found empirically are
indicated on the terminal and switch voltage trace. To avoid confusion, each numerically determined estimate of a marker ti is denoted ii. Aside from ic, each of these estimated marker values
are indicated by the events they correspond to in the position plot of figure 5.36. The estimate of
the exact instant of slug formation ic is determined by a pressure balance and indicated instead
in figure 5.37. The numerical values for the measured and predicted markers are compared in
table 5.4.
Observed
Simulated
Error
tB
4.092
4.120
4.092
4.118
0
-2E-3
tc
4.258
4.254
-4E-3
tE
4.290
4.325
4.292
4.325
tF
4.376
4.374
-2E-3
0
-2E-3
Marker
tA
tD
Table 5.4: A comparisonof measuredand predicted markers. All times have units of seconds.
Comparing the simulated and measured markers shows substantial agreement. The sampling
time of oscilloscope was 4E-3 seconds and so all of the predicted markers match identically with
their measured equivalents to within the resolution of the scope.
129
FORMATION
2RGION
II
"1
0.2
predicted x
0.1
t
tA
0.0
-------------------
------predicted x
------------------------------------------------------- I-------------------------------------------------------------------------------------:-,predicted xo(t)
-0.1
I
I
.04
.02
0
-. 02
-. 04
-. 06
to
3.4
3.5
3.6
3.7
3.8
t
3.9
4
4.1
4.2
4.3
(S)
Figure 5.36: A comparison of the predicted slug trajectory and associated voltage traces along with the
measured voltages. The junction switch signals are scaled and shifted to make for an easier comparison of
the temporal events. The 2REGION model begins at tD.
130
8
t
t
D..
7
6
H
Co
Pd
-
------
-
5
--------
---
4
3
0
4
-- --
||---
2
Fiue .7 Teprsuespedce|b h nueia siuato.h
make tinitsheimwer
Pin>P
Pin
1
0
to
3.4
3.5
3.6
3.7
3.9
3.8
t
4
4.1
4.2
4.3
(s)
Figure 5.37: The pressurespredicted by the numerical simulation. The marker i, indicates the time where
the inlet pressureand expansion tank pressure become equal during the slug's motion.
131
dx'
dt
t,)=
t,
1.9494 m/s
1.8
1.6
1.4
1.2
1.0
D)
0.8
0.6
0.4
0.2
0.0
3.4
3.5
3.6
3.7
3.8
t
3.9
4
4.1
4.2
4.3
(s)
Figure 5.38: The predicted velocity profile with markers correspondingto the slug formation, the point
where the leading edge contacts the electrodes and the point where the leadingedge enters the separator.
132
Further Comparison of Predicted vs. Measured Values
The numerically predicted flow rate
value
QN2
QN2
= 0.7595 mL/s is within 0.5% of the measured average
= 0.7563 mL/s. The initial and final expansion tank pressures should match to satisfy
the assumption of periodicity: pe (to) = 6.2 PSIG whereas pe (tF) = 6.184 PSIG. Similarly, the initial
and final inlet pressures should be equal: pi,(to) = 3.395 PSIG whereas pin (tF) = 3.370 PSIG.
Finally, the measured value tc = 4.258 s obtained from the switch voltage trace is nearly equal to
the compared with pressure crossing time of ic = 4.254 (see figure 5.37).
The velocity U ranges from 1.5424 m/s at
tE
to 1.9472 m/s at tF The final velocity should
match the initial velocity 1.9494 m/s that immediately preceded impact with the stationary column of mercury in the separator, which it does to within about 0.1%.
At first it does not seem that we are too far from the desired goal of a slug attaining the velocity
Uc predicted by the steady well-developed MHD model that would be expected to generate an
average terminal voltage of 5.015 mV while in contact with the terminal electrodes. This velocity
U
=
2.256 m/s predicted by equation (5.1) is on par with the maximum modeled velocity of
1.9472 m/s. Unfortunately there are two inconsistencies that prevent us from going much further
without subsequent experimentation. The first is that the CSA in the square channel where the
terminals are located is 2.52 mm 2 whereas the average CSA along the entire length of the channel
(including this segment of larger cross-section) is only 1.336 mm2 . Conservation would then seem
to dictate that the velocity while in contact with the electrodes should be scaled by the ratio of these
areas, resulting in a maximum velocity of only 1.032 m/s. Perhaps it is possible that separation
occurs as a result of the rapid change in cross-section as the slug enters the square portion of the
channel (see figure 5.39). Were we to believe that the slug hit the electrodes at the same velocity
at which it entered the channel then we would be justified in multiplying the velocity by a factor
of 1.1995 as the inner diameters of the syringe hubs have a CSA of only 1.113 mm 2 . The resulting
velocity would then be Uc = 2.281 m/s which is enticingly close to the desired value of Uc =
2.256 m/s. Without further examination this potential explanation is purely conjecture.
The second inconsistency is more significant. While the average terminal voltage over the
union of times where slugs were in contact with the electrodes was 5.015 mV, the average voltage
133
Electrodes
1. 11C
2 .52
Figure 5.39: A diagram of the abrupt area change as the slug first enters the squareportion of the channel.
for the slug modeled here is closer to 16.7 mV. Since the high-impedance oscilloscope provides
the only path for current to flow, it is certainly possible that electrostatic effects or some other
mechanism is behind the larger than expected voltage, as would be suggested by the small variance in velocity indicated in figure 5.26. Section 5.2 contains suggestions that should reduce such
uncertainty in future experiments.
134
5.6
Experimental Conclusions
One purpose of the many experiments performed was to evaluate the accuracy of a relatively
simple MHD model in regimes that deviate significantly from the steady well-developed model's
priors. The purely electromagnetic relationship of the IV-characteristic was found to agree surprisingly well with prediction. The predicted relationship between voltage and velocity was far
more difficult to assess. The predicted slug velocity relied on the two-region slug flow model of
chapter 4, which was found to fit experimental results for long enough slugs. With this model
the open circuit velocity could be estimated. Empirical comparisons of the measured and predicted open circuit voltages led to neither unequivocal confirmation nor rejection of the steady
well-developed flow model itself. Consequently, the issue of efficient conversion of kinetic to electrical energy predicted remains unsettled. More research is required to provide a satisfactory and
complete analysis of the merit of mesoscale MHD power conversion. With such a goal, the next
chapter presents a device that should produce a liquid metal flow that is approximately steady
and well-developed.
135
136
Chapter 6
Gravity-Driven Flow
This chapter is devoted to the conceptual design of a device that should provide a closer approximation of well-developed flow than the channels observed in chapter 5. Empirical data should
then be able to provide a better verdict on the ability of the model in chapter 2 to describe mesofluidic magnetohydrodynamic liquid metal flows. Beyond the value of the device presented in this
chapter with respect to experimentation, a simple model of the system provides results that are
suggestive of a viable generator. The experimental loop is self-contained and easily modeled to a
first order approximation. A primary result will be to propagate the predictions of overall power
output and conversion efficiency to this more complex and complete system. Once the governing
equations are presented, a reasonable set of parameters are used to find a numerical solution to
a miniature generator that is about the size of an AAA battery. Without devoting substantial effort to parameter optimization the predicted power output compares competitively with a small
A27 alkaline battery (see figure 6.1). Since the width of the channel is only an order of magnitude
shorter than its length, many of the model priors could begin to fail. Regardless, the process for
constructing a larger version follows the same methodology and the small size helps to put the
power generation statistics into perspective.
The experiment relies on buoyancy/gravity to pump mercury in a given direction around a
loop. A magnetic field is applied to a large portion of the channel with electrodes situated on the
side walls as detailed in chapters 2-5. Energy is provided to the system through PV-work of an
137
isothermal nitrogen expansion: pressurized gas injected at the bottom forms bubbles which rise
to the top where the gas is separated from the flow using the high surface tension of the metal (see
section 5.1.3).
Figure 6.1: A miniaturegravity-drivengenerator(5 cm tall) is shown next to an AAA battery and an A27
battery (drawn to scale). The generatoris comparable in size to the AAA and comparable in power output
to the A27 based on the calculations thatfollow.
138
6.1
Model Specifics
The unsteady dynamics present during bubble formation are quite complicated and we therefore
consider only time-averaged velocities in an effort to neglect some of the time-varying effects
that we expect will mostly appear as small-signal noise on an otherwise steady flow. While the
entire system can be modeled in one (axial) dimensioni, the effects of compressibility lead to a
transcendental system and analytical solutions can only be taken so far.
w
Nitrogen Inlet
i
-Nitrogen Outlet
I
'Sintered Filter
-Electrodes
tEl
0
Inflow Restriction
(Throat)
Figure 6.2: The diagram shows a miniature generatordrawn to scale with pertinent locations used in the
model indicated by stations 0 through 5.
'The estimated forces are approximated via the numerical simulations of chapter 2.
139
Nitrogen flows from a reservoir through a throat designed to regulate the inflowing gas and
ensure known thermodynamic conditions at station 1 where it is injected into the mercury loop
as a high velocity jet. Momentum is transfered to the liquid metal flowing in at station 5 and
slugs move up the right hand side between stations 2 and 3. Between 3 and 4 the liquid metal
decelerates as nitrogen exits the loop orthogonally through a porous filter. Finally, a moderately
strong magnetic field is applied to the single-component LM flow between stations 4 and 5 to
extract electrical energy.
We begin by presenting a model for the primarily single-component fluid flow between the
outlet and inlet (stations 3 through 5). This model is straightforward enough under the approximation of steady well-developed flow. In such a situation, the viscous and Lorentz forces can be
neatly represented by a single force proportional to velocity whose exact value can be determined
numerically and verified experimentally. We then consider the region around the nitrogen jet
(stations 5 through 2). The transcendental components enter into the characterization of the twocomponent slug flow between stations 2 and 3 due to the flow of compressible nitrogen bubbles
along a pressure gradient.
6.1.1
The Side Containing Mainly Liquid Metal
The left hand side of the loop contains a single-component flow of incompressible liquid metal
having a mass flow rate ThM that conservation dictates is constant across any cross-section of the
channel. Through methods discussed in chapter 5 the mass flow can be confirmed experimentally
by direct observation of slug velocity. In both the observable region between stations 2 and 3
and the obscured region where power is extracted, the cross-sectional area of the channel is A.
The velocity in the magnetized region is of primary concern as it determines the rate at which
the liquid metal's kinetic energy is converted to electricity. Letting U denote the mean velocity of
the liquid in the magnetized region, rnLM
=
p UA. We begin our analysis at the point where the
nitrogen exits the top of the loop with a mass flow rate of n N 2 that is also measurable by methods
discussed in chapter 5.
140
Station 3 to 4: Exiting Gas
At station 3 the flow reaches a region where one of the channel walls consists of a hydrophobic
sintered metal filter through which the gas can exit the channel but with small enough pore size
as to prevent the liquid metal from escaping. As long as the open area of the filter is much larger
than the cross-sectional area of the throat of the inflow restriction, we may assume the temperature
and pressure of the isothermal gas bubbles at 3 are nearly atmospheric 2 with a density of p, =
Pa/RT that is expressed in terms of nitrogen's specific gas constant, R = 296.55 J/ kg K. The crosssectional area at 3 is also A and thus the time-averaged volumetric flow rate of the two-component
inflow can be expressed as the sum of the liquid metal and gas flow rates. Were no gas flowing the
velocity v3 would be equal to U. We can define a corresponding velocity component V attributed
exclusively to the gas flow such that V3 = U + V and inN2
pa VA. Both U and V are empirically
observable through measurements at station 3 of the slug velocity U + V and the ratio U/V of
slug length to separation distance, which is equal to the ratio of volumetric flow rates. It is worth
considering the ratio of the flow rates in more detail.
U
V
UA
VA
_
mLM/P
-
N 2 /Pa
U/V can be thought of as a conversion efficiency of volumetric flow rates: if U/V = 0 no liquid
metal is flowing and no electrical power can be extracted; for U/V > 1 only a small flow of gas
is required to generate a large liquid metal velocity. A key simplifying assumption that can be
confirmed by the mere existence of visible slugs is that U/V > pa/p
mLM
>
N2 *
1E-4, implying that
(6.1)
In a relatively short distance after the slugs reach the filters, we hypothesize a majority of the
nitrogen will have exited the channel in a direction orthogonal to its axis. We can confirm this
hypothesis with a high-speed camera. The location of station 4 is defined to be the time-averaged
2
This assumption agrees with experimental observations of the flow rate versus pressure across similar filters, as
detailed in chapter 5.
141
point at which nearly all of the gas has left the channel. As the gas is pushed out, conservation
dictates that since the cross-sectional area at 4 is also equal to A, the liquid metal must decelerate
to velocity v4 = U. The transfer of momentum and deceleration lead to a pressure head at station
4. The dynamic effects between 3 and 4 will dominate any viscous effects and conservation of
momentum gives a constitutive relationship between the pressure head and mass flow rates.
1
P4 =P.a+ (rfL1(V3
/
-V4)±r
2
(6.1)
V3) (61pUV
Station 4 to 5: Single-Component Flow
Between stations 4 and 5, the liquid metal experiences a pressure gradient due to gravitational,
viscous and electromagnetic forces. The channel cross-section is constant between 4 and 5 with
area A. Conservation dictates that V4
=
V5= U.
In the case of steady well-developed flow both
the viscous and electromagnetic forces are proportional to velocity and are expressed in terms of
a hydraulic impedance b equal to the ratio of pressure head to velocity.
Fviscous +
Feiectromagnetic=
b UA
Reynolds numbers around 5500 indicate that this may be wishful thinking but it can at least serve
as a first-order approximation. Again, it should be noted that Lorenz forces oppose velocity, act
to dampen turbulence and can often lead to laminar flow even for large Reynolds numbers. For a
vertical distance h separating the inlet and outlet,
P5 = P4 +
pgh - bU
Pa + pUV + pgh - bU.
6.1.2
Slug Formation
At station 5 the liquid metal flow enters the control volume at the bottom of the device (see figure 6.2) where it combines with a jet of inflowing nitrogen at station 1. Slugs form and travel
upward. As with standard jet pumps, the close proximity of station 5 to the jet and the assump142
tion that any transverse pressure gradient at the jet boundary is small implies the pressures felt at
1 and 5 are nearly equal.
P1 = Pa + pUV + pgh - bU
(6.2)
The location of station 2 is defined to be the point at which slugs have fully formed. The distance
between 1 and 2 is assumed to be small enough that viscous and gravitational forces are negligible
in comparison to the inertial effects experienced by the rapidly accelerating liquid. Put another
way, slug formation occurs on a length scale that is short3 compared to h. An abrupt acceleration
results due to the step function in volumetric flow rate from the additional volume occupied by
the gas. Both stations 2 and 5 have cross-sectional area A and it follows that the liquid metal
velocity at station 5 is equal to the velocity U within the magnetized region.
The Nitrogen Jet and Liquid Metal Acceleration
Nitrogen flows between stations 0 and 1 through a the small bore hole of cross-section Ai.
The
process is modeled as isentropic/adiabatic and the difference in pressures across the throat will
never be large enough to induce choked flow. The thermodynamic state of the gas at 1 depends
on the state of the gas at 0. For now we will describe the gas flow at 1 as being at some unknown
temperature T and corresponding velocity vi. A straightforward order of magnitude comparison
implies that these values appear only in terms we are able to neglect. At station 2 the crosssectional area is also A but the channel must now accommodate both the liquid and gas flow. Due
to the small length scales and resulting time scales of heat conduction we estimate (as in chapter 4)
that the gas reaches a thermal equilibrium at room temperature T by the time it passes through
station 2 and thus has density p,, = Pa (P2/Pa). The time-averaged velocity of the two-component
flow at 2 is
V2=-
3This observation
A
p
"+ LM
2
7p,9 2
=
V Pa as
P2
W
agrees with the empirical data presented in chapter 5 so long as W
143
< h.
and conservation of momentum dictates that
P2
=
P1+
(
ULMU
+ rnN2 V
(fLM + inN2) V2
1
(6.1)
p1
+ A(rhLMU +
mN
2
vl -
mLMv2
=
P1+ PaVV1 - PUVPa/P2
=
pa + pgh - bU + pUV (1 - pa/
2)
+ pVv1.
Typical values for vi and U are on the orders of 100 m/s and 1 m/s, respectively. Given the
large difference in densities between the nitrogen and mercury,
pUV > PaVV1.
(6.3)
The pressure P2 does not significantly change with v 1 . The flow upstream of the throat is coupled
to the flow downstream only by P2 and can be modeled independently. The pressure at station 2
simplifies to
P2
Pa + pgh - bU + pUV (1 - Pa/P2)
(6.4)
The pressure at the outlet of the throat, expressed in terms of P2, is given by
P1
P2 - PUVPa/p 2 - PaVV1.
(6.5)
Rising Bubbles and the Plug Flow Hypothesis
Between stations 2 and 3 the slugs flow against gravity through a channel of cross-section A and
length ~ h. The pressure at the bottom is greater than the pressure near the outlet and so the
nitrogen bubbles expand as they move upwards. By the fact that expansion occurs on a time scale
that is long in comparison to the time scale of thermal conduction, we assume the gas is restricted
to the room temperature isotherm. This implies that the time-averaged two-component flow is
barotropic.
144
At best the slugs will form at regular intervals and the flow will be periodic once the transients
from the startup process vanish. Even if the slug lengths are highly irregular we can still consider
the time-averaged density at each point in space. The fluid is treated as a single component flow
with a varying density that depends on the local pressure and flow rates of the gas and liquid
metal. At a distance s from 2 in the direction of station 3, the net volumetric flow rate of the twocomponent flow at a point existing at pressure p(s) is the sum of the liquid and gas component
volumetric flow rates. The time-averaged velocity is the volumetric flow rate divided by the crosssectional area,
v(s)
=
U + V Pa
and the time-averaged density is the ratio of the net mass flow divided by the net volumetric flow
(6.1) rn
P(s) ~Q(s)
pU
U +Vpa/p(S)'
Given the turbulence induced within a moving slug through contact with the rough walls
and observations suggesting that gas does leak around the liquid metal slugs (see sections 4.1.4
and 5.3), it is probable that there is often reduced contact between the slugs and the walls. The
significant surface tension forces of the liquid metal in hydrophobic contact with the channel walls
allows the modification of shear stresses on the surface through slug elongation and the development of a thin annular region of nitrogen that surrounds the slug. The correlation of results from
numerical simulation and experimental data from a high-speed camera agrees to a high degree
of certainty with such hypothesized behavior. The assumption of plug flow implies a uniform
velocity profile across any flow-orthogonal cross-section of the channel and thus we neglect the
impact of viscous forces on the flow between 2 and 3. While this approximation will lead to nice
analytical results, it is clearly only an approximation that provides an upper bound on the overall
conversion efficiency. Exploiting the surface tension of the liquid metal along with some clever
surface engineering of the channel wall could potentially make this approximation more realistic.
Coupled with the barotropic nature of the flow, the plug flow hypothesis suggests the use of
145
the compressible form of the steady Bernoulli equation to characterize the flow between 2 and 3.
2(v
±j
-v(s)2)
p/i(s)dp+ pg(h - s) = 0
Substituting v(s) and li(s) and simplifying for both the general case as a function of s and for the
case where s = 0 at station 2,
pUV- p(s)'[ _ Pala
Pa
.P
(s).
'pUV-p2
PUI-P
Pa
pV2['(
2pa
P(S)
pa~
1--.
pg(h-s)
Pa
fpa2
PV
+
±
2 I2
1
Pa
-
-]
2Pa
V
U
pgh V
+
P2
Pa
n Pa =0
p(s)J
(6.6a)
paj
+-VIn
-P2
U
=0
(6.6b)
For fixed values of h and b the only unknowns in the aforementioned system of equations are P2, U
and V. The nitrogen flow rate rnN2 =p VA can be set to any desired value by selecting the throat
size Ain appropriately. The pressure
P2
at the point of slug formation is not directly controllable
and is treated as a dependent variable. The liquid metal velocity U is not directly controllable
although it is a primary variable of interest.
We now can consider the proportion
# of liquid metal in the region of two-component
flow
between stations 2 and 3, which is controlled directly by adjusting the amount of liquid metal in
the system.
#=
If
# is too
13
h 2
(s)dds
P
small then the assumptions of slug formation will fail with nitrogen flowing around
small beads of liquid metal. If
# is too close to 1 then it does not make sense to
neglect viscous
forces in the flow between 2 and 3.
The Bernoulli equation is transcendental in p(s) and a closed form for pressure as a function
of position cannot be readily found. We can however use (6.6a) to express the position along the
channel between 2 and 3 as a function of the local pressure.
s(p) = h +
-Pa/p)
(1UV
p9 Lpa
P
(1 - (Pa/P)2) + 1 -
2pa
146
In
Pa
U
-
Pa)
Differentiating with respect to p,
ds
dP
(Pa)2
p9
pUV
pV2)
P
Pa
p
PaU
P V
Integrating with respect to pressure rather than position,
1j P 3 -Pa ds
h
P2
- Pa
p2
PUV)
pgh
p dp
P2
Making use of (6.4), the liquid metal velocity can be expressed as
bU = pgh(1 - #)
(6.7)
which shows that the difference in the hydrostatic pressure heads between the left and right hand
side of the loop is balanced by the dissipative force. As viscous and Lorentz forces are neglected
in all other regions, this result is clearly expected.
6.2
Magnetohydrodynamic Behavior
Electrodes line the side walls of the entire channel between stations 4 and 5. A uniform magnetic
field is applied to the flow resulting in the conversion of kinetic to electrical energy. The effects
of the Lorentz force enter into the system of equations through the hydraulic impedance b =
-Ap/U
given by (2.25a). The voltage, current and electrical power that result from (2.25) are also
of interest. In contrast, r and the efficiency-optimal operating point q* only relate to the conversion
of hydrodynamic to electrical power of the liquid metal flow itself. For the generator discussed
here we would rather relate electrical power output to the rate that work is done on the liquid
metal by the gas flow that drives the system.
9total =
147
Pelec
Pgas
6.3
Gas Dynamics
Compressible effects related to the nitrogen require consideration in order to fully describe the
system. The first aspect is the flow through the throat at the inlet. The second is the expanding
flow between stations 2 and 3 that was described in the derivation of (6.6a). Finally, the overall
efficiency of the system will relate the electrical power to the rate at which energy is transfered
from the nitrogen to the liquid metal flow.
The Inlet
The conditions upstream of the throat are known and constant. The pressure po and throat size
Ai, are both treated as controllable design parameters. The gas at 0 is assumed to have attained
isothermal equilibrium p, = po/RT at room temperature T = 295.55 K due to the small length
scales involved (see section 4.2). Under the assumption that
Ai, < A
(6.8)
viscosity can be neglected in the flow through the larger channels since any such effects will be
dominated by those at the throat. The pressure upstream is chosen to be greater than the pressure
downstream and by reasoning identical to the justification for (4.1),
ThN 2
-Ainpo
2\
2k
[Pi p1) 2/k
2/.
RTkRT(k - 1) (Ppo
(6.9)
i )(k+1)/k]
kll
PO)
I
As mentioned previously in section 6.1.2, the pressure downstream can be considered inde-
pendently of the velocity of the incoming gas. The only requirement for the steady state operation
of the system is that the inflow provided by the throat is equal to p, VA. For any pressure exceeding the required value for p1 an inlet area can be found that provides the necessary flow. A further
constraint to consider is that po should be high enough for the nitrogen to overcome the resting
gravitational pressure head of the mercury to facilitate the system startup. Since the pressure at
the left and right hand side of the loop will equalize at rest, the resting gravitational pressure head
148
at station 1 is approximately equal to
P1,rest = Pa + pg
h± (w+ Oh)cos
where 9 = arctan w/h. A more detailed analysis should take the exact geometry (i.e. bend radius
at corners, etc.) into account in finding the actual resting pressure. Thus the pressure upstream
of the throat should be chosen to be slightly larger than the pressure expected at station 1 both in
steady-state and at rest.
PO =
or +
max{p1, pi,rest}
(6.10)
Large values of 6p will result in decreased efficiency whereas small values require larger throat
areas in order to supply the desired flow rate, possibly contradicting the assumption of (6.8). For
the numerical calculations that follow we use a value of op = 100 Pa.
Work Done by the Nitrogen
Taken as a whole, the system entails an approximately isothermal expansion of the nitrogen between the supply reservoir to the atmosphere when W < h. The rate at which PV-work is performed on the liquid metal is then Pgas = rnN2 RT InpoPa-
149
6.4
Numerical Values
Increasing the characteristic length of the channel leads to higher efficiency at the cost of device
size and decreased ability of surface tension to maintain the contiguity of slugs. We start by
choosing a square channel cross-section having side length W = H = 2 mm. This channel size
is about the largest where we could expect mercury slugs to flow against gravity without significant breakup. Assuming a large but realistic magnetic field strength of Bo = 1.4 T, the optimal
efficiency is found to be approximately r/* = 0.695 from table 2.4. The atmospheric conditions
are taken to be T = 295.55 K and pa = 101.3 kPa. The density and electrical conductivity of mercury are p = 13546 kg/m
3
and a = 1.04452E6Q-1/m. The generator dimensions correspond to
figure 6.1: the overall height and width are h = 50 mm and w = 5 mm. The device is of comparable size to an AAA battery.
Numerically solving the system of equations presented in the preceding sections of this chapter, figure 6.3 shows the admissible combinations of electrical power and efficiency over a range
of values for
#
and a = Re/R*. Equation (6.10) results in a discontinuity at p1
=
pi,rest. Not all
50 -
&,fee
n7
0
20
10
1
2
3
4
Pelec
5
6
7
8
9
10
(MW)
Figure 6.3: Electrical power versus overall conversionefficiency for the miniaturegravity-drivengenerator
shown in figure 6.1.
operating points are desirable nor are all even possible. Large values for electrical power require
150
large throat areas that violate (6.8) and/or unreasonably small values for
#. Without loss
ality we assume the throat has a circular cross section with diameter Din = 2
only solutions for which Din
of gener-
Ai/r and consider
250 pm (< W) as shown in figure 6.4. Throughout this restricted
solution space, p,,est > p1.
151
Isoclines of:
(1) Constant electrical power
(2) Constant mercury volume
- - (3) Constant load impedance
50
20
-0
-
2 .,m
10
-
0 mW
-.
dP2.5m
to
1.5 mW
10
1. 0 mW
1Q
0
o- o-
mW
-10.5
-7
150
-
o..
200
250
throat diameter
(microns)
Figure 6.4: The solution space for the miniature gravity-driven generatorshown in figure 6.3 and the
resulting relationshipsbetween (1) the throat diameter Di
<; 250 pm, (2) the conversion efficiency qtotal,
(3) the percentage$ of the volume between 2 and 3 which is occupied by mercury, (4) the ratio a = Re/R*
of the load resistance to the efficiency-optimal load resistance, and (5) the electrical power PeIec provided to
the external circuit.
152
6.4.1
Operating Point of the Miniature Generator
Picking an output power Pelec = 3.0 mW (on par with an A27 alkaline battery4 ), 4 and a are chosen
to maximize
Tttal
7
under the restriction that Din ; 250 pm.
7total =
37.11%
Pelec = 3.0mW
Vt = 0.815 mV
I = 3.68 A
Rj = 0.2155 mQ
(a = 2.092)
# = 44.79%
po = 106.54 kPa
(0.7605 PSIG)
p, = 105.97 kPa
(0.6772 PSIG)
Pi,rest = 106.44 kPa
(0.7460 PSIG)
P0 > Pi,rest > P1
Di, = 250 pm
(Re = 5508)
U = 0.316 m/ s
V = 0.396 m/ s
vi = 30.76 m/ s
Approximations were made based on equations 6.1 and 6.3. Plugging in values, inLM /rnN 2 -9400
and pUV/paVvi
6.5
120, implying that both underlying assumptions are satisfied.
Empirical Steady Flow Realization
The numerical values chosen in the preceding section describe a conceptual device as an exercise
in system design that also helps to demonstrate a potential path towards miniaturization. The second goal of this chapter was to design a device which will provide conditions that better approxi4
http://data.energizer.com/PDFs/A27.pdf
153
mate steady well-developed flow. The miniature generator design will not suffice for an empirical
examination of power generation using a well-developed flow-h should be made much larger
with respect to W to allow sufficient distance for the predicted velocity profile to fully develop.
The same set of equations can be solved with a different value of h to design a valid experiment.
Future work will include the construction of a gravity driven generator for the verification of the
model of chapter 2.
154
Chapter 7
Conclusion
Chapter 2 introduced the theory describing the MHD effects under the assumption of steady welldeveloped flow. The IV-characteristic of the channel was expressed in terms of macroscopic variables such as pressure drop and average velocity of the fluid in the channel. Since an exact solution
is not known to exist for the system of coupled elliptic PDEs-the Navier-Stokes and induction
equations-finding the macroscopic properties under the range of pertinent channel parameters
requires numerical simulation. It was shown that from the perspective of macroscopic variable relationships, the reliance on numerical simulation could be reduced to a single degree of freedom in
the case of rectangular channels. The load resistance maximizing the efficiency of hydrodynamic
to electrical power conversion led to an optimal operating point of maximum efficiency r,*. Amazingly, the optimal efficiency depends only on the magnetic field strength, channel cross-sectional
geometry and the intrinsic properties of the liquid metal. Choosing q* to be the remaining unknown requiring numerical simulation, the macroscopic properties of the system were expressed
in terms of this optimal operating point. One of the main results of chapter 2 was a plot of q* versus side length (figure 2.4) for square channels over a range of magnetic field strengths for both
Hg and GaInSn. Looking up values directly from this plot enables square channel design without
any reliance on numerical solutions to the coupled PDEs.
Chapter 3 presented a rough overview of the algorithms that provided numerical solutions to
the system of PDEs. The posited relationships used to simplify the system of equations in chapter 2
155
were verified numerically. An example solution was also provided for the set of parameters used
later in chapter 6 and the resulting flow and induced magnetic field profiles were plotted for
various operating points (i.e. load resistances).
Chapter 4 presented a model for liquid metal slug flow where a thin layer of nitrogen between the surface of the slug and the rough channel wall exerted shear stress on the surface of the
slug. The results correlated well with experimental observations of slugs in a high Reynolds flow
that, under a given pressure drop, moved faster than even their laminar flow equivalents would
predict. Given the extremely high surface tension and low viscosity of the liquid metals, such a
model is somewhat believable. The main purpose of the model was to allow the prediction of
slug trajectories in visually obscured regions of the experiments in chapter 5. The accuracy of the
mechanism to describe the behavior was much less important than the accuracy of the trajectory
prediction, which was shown to be quite satisfactory in the experiments of chapter 5. If such an
annular flow model was shown to be correct, some interesting consequences meriting further investigation would include an examination of the force balance between shear stresses and surface
tension at the nitrogen/slug interface, particularly in relation to predictions of slug breakup. The
Weber number did not appear to describe when slugs would or would not remain contiguous
within a confined channel. Another area of future research highly motivated by chapter 4 would
be the application of clever microscale surface engineering to reduce the viscous forces felt by the
high velocity slugs. Such features could potentially provide significant increases in the overall
efficiency of small-scale MHD-based generators: of the energy flow out of the system, whatever
proportion of the hydrodynamic power is not converted into electricity can be accounted for by
either viscous or ohmic heating.
Chapter 5 described experiments designed to examine the models presented in chapters 2 and
4. The annular flow model of chapter 4 was well supported empirically when the lubricated flow
approximation was shown to hold. The experimental data gathered also strongly supported the
accuracy of the IV-characteristic that resulted from the steady well-developed MHD flow model.
Predictions and experimental measurements of the relationship between voltage and velocity
could not be reconciled. Given that the magnetic and electric fields develop on a much shorter
156
time scale than the velocity profile, it is not surprising that the IV-characteristic is well described
by the model. The experiments performed all shared a common philosophy whereby a slug was
propelled at a high velocity through a magnetic field as it traversed from the nitrogen inlet to the
outlet. Attempts to verify a well-developed model using such a setup were fatally flawed. Other
attempts were made to pump liquid metal through channels at a constant flow rate to determine
the relationship between terminal voltage and velocity for various load resistances. In addition to
a desire to avoid working with large volumes of mercury, the main problem encountered was that
large velocities were required to obtain usable voltage traces. The pressures required to pump the
liquid at such a rate typically destroyed the channels before measurements could be taken. By
propelling liquid metal slugs, we were able to obtain sufficient velocities.
Chapter 6 presented a device design that combines the high velocities seen in the closed-loop
slug flow experiments with a much more realistic method to approximate steady well-developed
flow. In contrast to the experimental devices in section 5 the gravity-driven generator does not
require check valves or any other non-fluidic moving parts. The predicted power is not trivial
in comparison to batteries of similar sizes. Of course, the discussion has neglected any mention
of the size requirements of whatever system is providing the gas flow (e.g. heat pipes). Without
any moving parts the gravity driven pumps could have an incredible lifetime, both on and off
the shelf. Sources of degradation over time are primarily restricted to leaks, amalgamation of the
liquid metal and the electrodes, and the buildup of impurities within the liquid metal.
Design Comparisons
There are two downsides of the gravity-driven system described in chapter 6 in contrast to the
loop design of chapter 5. The first is that the orientation with respect to gravity does matter (and
it would not function in outer space). The second is that the lower density and higher viscosity
of the gallium eutectic makes mercury a far more viable working fluid. In systems more like
those in chapter 5, the significantly higher conductivity of GaInSn is sufficient to counter its higher
viscosity to the point where devices using GaInSn can attain higher power outputs and efficiencies
than their mercury counterparts of comparable dimension. Aside from the obvious advantage of
157
lower toxicity-GaInSn is about as toxic as aluminum-the gallium eutectic also has a significantly
lower vapor pressure at room temperature along with a much higher surface tension. Both factors
allow for devices that can be made less likely to leak. Unfortunately the gallium eutectic also has
its own drawbacks. It has a higher melting point than mercury (-10.5 C versus -38.8oC) and
is significantly more expensive. It aggressively forms amalgams with more metals than mercury,
oxidizes far more readily and wets nearly all materials other than gallium oxide. Depending on
their design, devices based on GaInSn may require some amount of gallium deposition.
General Observations Regarding Design
Though the model of chapter 2 was developed for both rectangular and circular channels, the
rectangular channels are more well-suited for power generation. Most of the discussion, experimentation and design was restricted to square channels. Varying the aspect ratio slightly may
serve some benefit depending on the application. Very large or small aspect ratios will lead to
issues with capillarity preventing contact with all four walls. Slight changes to the aspect ratio
can help to increase R* so that the terminal voltage is slightly higher and the current slightly
lower. Making W > H could potentially result in a stronger magnetic field within the channel.
Nonetheless, using a square channel is a good choice for typical applications.
Viability of Mesofluidic Magnetohydrodynamic Generators
In the entire course of the research and experimentation performed we found no fundamental
barriers to realizing small scale MHD generators. There are certainly difficulties caused by the
high-current/low-voltage output. Such limitation can be overcome by low-voltage electronics,
staggered electrodes and connecting the electrodes of multiple devices in series.
Fabrication complexity could also lead to difficulty. The mesoscale channels still have microscale features. Amalgamation and electrode conductivity must also be considered along with
wetting in the case of GaInSn. Production requiring carefully controlled environments and precision engineering suggests large per unit cost. Regardless, no fundamental barriers prevent the
realization of such generators.
158
The entirety of the research presented herein and the corresponding experimental results all
point toward a strong argument for further exploration into mesoscale magnetohydrodynamic
power conversion. While not definitive the evidence presented herein is certainly compelling.
159
160
Bibliography
[AS10]
Performance analysis of a diagonal mhd accelerator for space propulsion. IEEE Transactions on Plasma Science. 38(2):199-205, 2010. Print.
[BR96]
C. Borghi and P. Ribani. MHD-steam thermal power plant electrical stations with zero
stack emission. IEEE Transactions on Energy Conversion. 11(1):194-199, 1996.
[Bra08]
T. Brackbill. Experimental investigationon the effects of surface roughness on microscaleliquid
flow. Thesis (M.S.), Rochester Institute of Technology, Rochester, New York, 2008.
[Gol99]
A. Goldman. Handbook of modern ferromagnetic materials.Kluwer Academic Publishers,
Boston, 1999.
[GVT+05] S. Gogte, P. Vorobieff, R. Truesdell, A. Mammoli, F. van Swol, P. Shah and C. J. Brinker.
Effective slip on textured superhydrophobic surfaces. Physics of Fluids, 17(5):51701,
2005.
[HL37]
J. Hartmann and F.Lazarus. Experimental investigations on the flow of mercuryin a homogeneous magneticfield. Kebenhaven, Munksgaard, 1937.
[HY66]
W. F. Hughes and F. J. Young. The electromagnetodynamics of fluids. Wiley, New York,
1966.
[Kat09]
J. I. Katz.
Circulation in blowdown flows. Journal of Pressure Vessel Technology, 131(3):
34501, 2009.
161
[KC08]
P. K. Kundu and I. M. Cohen. Fluid mechanics, fourth ed. Academic Press, San Diego,
2008.
[MB01]
U. Muller and L. Bhiler. Magnetofluiddynamicsin channels and containers.Springer, New
York,2001.
[MOB05]
N. Mortensen, F.Okkels and H. Bruus. Reexamination of Hagen-Poiseuille flow: Shape
dependence of the hydraulic resistance in microchannels. Physical Review E., 71(5), 2005.
[NS95]
National Fire Protection Association., and Society of Fire Protection Engineers. SFPE
handbook offire protection engineering, second ed. National Fire Protection Association,
Quincy, Massachusetts, 1995.
[Rob67]
P. H. Roberts. An introduction to magnetohydrodynamics. American Elsevier Pub. Co.,
New York, 1967.
[SA04]
B. M. Smith and S. Anghaie. Gas core reactor with magnetohydrodynamic power sys-
tem and cascading power cycle. Nuclear Technology 145(3): 311-318, 2004.
[She65]
J. A. Shercliff. A textbook of magnetohydrodynamics.Pergamon Press, New York, 1965.
[Tar93]
A. Tarnogrodzki. Theoretical prediction of the critical Weber number. Int. J. Multiphase
Flow, 19(2):329-336, 1993.
[Whi03]
F. M. White. Fluid mechanics, fifth ed. McGraw-Hill, Boston, 2003.
[Whi74]
F. M. White. Viscous fluid flow. McGraw-Hill, New York, 1974.
162