Tilings from some non-irreducible, Pisot substitutions Hiromi Ei and Shunji Ito
advertisement

Discrete Mathematics and Theoretical Computer Science
DMTCS vol. 7, 2005, 81–123
Tilings from some non-irreducible, Pisot
substitutions
Hiromi Ei1 and Shunji Ito2
1
Department of Information and System Engineering, Chuo University, Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
Department of Information and Systems Engineering Faculty of Engineering, Kanazawa Universtiy, Kodatsuno,
Kanazawa, Ishikawa 920-8667, Japan
2
received Nov 25, 2002, revised Sep 22, 2004, Dec 30, 2004, accepted May 23, 2005.
A generating method of self-affine tilings for Pisot, unimodular, irreducible substitutions, as well as the fact that the
associated substitution dynamical systems are isomorphic to rotations on the torus are established in [AI01]. The aim
of this paper is to extend these facts in the case where the characteristic polynomial of a substitution is non-irreducible
for a special class of substitutions on five letters. Finally we show that the substitution dynamical systems for this
class are isomorphic to induced transformations of rotations on the torus.
Keywords: Substitution, Pisot number, Pisot substitution, atomic surface, tiling, fractal, dynamical system
1
Introduction
In this paper we want to discuss tilings and dynamical systems generated by the following substitutions
given by
K+1 times
z }| {
1 → 11 · · · 1 2
2 → 3
3 → 4
, K ≥ 0.
(1.1)
σ :
K times
z }| {
4 → 1···1 5
5 → 1
The characteristic polynomial of the incidence matrix Lσ is
x5 − (K + 1)x4 − Kx − 1 = (x2 − x + 1)(x3 − Kx2 − (K + 1)x − 1).
(1.2)
Since it is non-irreducible, its factor x3 − Kx2 − (K + 1)x − 1 is a minimal polynomial of some Pisot
number β. Furthermore | det(Lσ )| = 1; we thus say that the above substitution σ is of the non-irreducible,
Pisot, unimodular type. The aim of this paper is to discuss how we obtain tilings and dynamical systems
generated by non-irreducible, Pisot, unimodular substitutions for the special class (1.1) which is coming
from Pisot β-expansions.
c 2005 Discrete Mathematics and Theoretical Computer Science (DMTCS), Nancy, France
1365–8050 82
Hiromi Ei and Shunji Ito
Let us recall some results in the irreducible, Pisot, unimodular case. (See [AI01].) For example we
consider the following substitution σ on 3 letters:
1 → 12
2 → 13 .
σ :
(1.3)
3 → 1
The substitution σ has the incidence matrix
1
Lσ = 1
0
1
0
1
1
0
0
and its characteristic polynomial x3 −x2 −x−1. So this substitution is of the irreducible, Pisot, unimodular
type.
For the contractive plane P of the matrix Lσ , a stepped surface which is a discrete plane approximation
of P is determined. Thus we have a tiling of the plane P with three prototiles, which are parallelograms,
by using the projection π defined as the map from R3 to P along the eigenvector u of Lσ corresponding
to the Pisot eigenvalue β.
This substitution σ has a unique fixed point and P
we denote it by ω = s0 s1 · · · sn · · · . Then we obtain
n−1
the sets Xi (i = 1, 2, 3) given by the closure of {π k=0 esk | sn = i, n = 1, 2, · · · } and X = ∪3i=1 Xi ,
3
where {ei }i=1,2,3 is the canonical basis of R . These sets Xi , X are called atomic surfaces of σ.
On the other hand, it is known that the tiling and the atomic surfaces can be generated by the so called
tiling substitution E1∗ (σ) on the Z-module G1∗ defined by
X
G1∗ =
nδ δ | nδ ∈ Z, # {δ ∈ Z3 × {1∗ , 2∗ , 3∗ } | nδ 6= 0} < ∞ .
3 ∗ ∗ ∗
δ∈Z ×{1 ,2 ,3 }
Here we identify (x, i∗ ) ∈ Z3 × {1∗ , 2∗ , 3∗ } with the unit square
{x + sej + tek ∈ R3 |{j, k} = {1, 2, 3}\{i}, 0 ≤ s ≤ 1, 0 ≤ t ≤ 1},
and summation “+” in an element in G1∗ means the union of these unit squares. More generally we
(i)
(i)
(i)
(i)
consider a substitution σ denoted by σ(i) = W0 W1 · · · Wk · · · Wl(i) −1 . By using the canonical
homomorphism f from the free monoid on 3 letters to Z3 defined by f (i) = ei (i = 1, 2, 3) and the
(i)
(i)
notations Pk and Sk stand for respectively the prefix of length k and suffix of length l(i) − 1 − k of
σ(i), we define the endomorphism E1∗ (σ) on G1∗ as follows:
E1∗ (σ)(x, i∗ ) :=
3
X
X
(j)
−1
∗
(L−1
σ x + Lσ f (Sk ), j ) .
j=1 S (j) :W (j) =i
k
k
On this setting we can generate the stepped surface of the plane P by E1∗ n (σ)((e1 , 1∗ ) + (e2 , 2∗ ) +
(e3 , 3∗ )) (n → ∞ ) and the atomic surfaces by
Xi = − lim Lnσ πE1∗ n (σ)(ei , i∗ ) (i = 1, 2, 3),
n→∞
Tilings from some non-irreducible, Pisot substitutions
83
where the right side converges in the sense of the Hausdorff metric and we denote limn→∞ Lnσ πE1∗ n (σ)(ei , i∗ )
ci . Furthermore, we have the following property:
by X
ci denoted by X
b do not overlap up to a set of Lebesgue
Property 1.1 (1) The pieces in the union ∪3i=1 X
measure 0,
(2) the following set equation holds:
c
L−1
σ Xi =
3
[
[
(j)
cj − L−1
(X
σ πf (Pk )) ,
j=1 P (j) :W (j) =i
k
k
where the sets in the right side of the equation do not overlap up to a set of Lebesgue measure 0,
b →X
b given by
and moreover, the transformation F : X
(j)
(j)
c
F (x) = L−1
σ (x + πf (Pk )) if x ∈ Lσ Xj − πf (Pk )
is well-defined and it is a Markov transformation with matrix structure Lσ ,
b → X,
b called the domain exchange transformation, given by
(3) the transformation E : X
E(x) = x − πei
ci
x∈X
is well-defined and the transformation E is measure-theoretically isomorphic to a rotation on the
bs , k =
2-dimensional torus, and moreover, the orbit of the origin point by E satisfies E k (0) ∈ X
k
0, 1, · · · .
Property (2) and (3) are not known to hold for any irreducible Pisot substitution. Property (2) holds
provided that (1) holds if the substitution σ has the strong coincidence condition (cf. [AI01]). Moreover,
for the transformation F to be well-defined, the pieces must not overlap. The isomorphism with a rotation
(3) is equivalent with the tiling property.
The aim of the paper is to obtain the analogous property for the non-irreducible, Pisot, unimodular
substitutions given by (1.1).
This paper is sketched as follows.
In Section 2, we define a projection map π from R5 to the contractive 2-dimensional plane of the
incidence matrix Lσ of σ. A substitution given by (1.1) has a unique fixed point. Therefore, using the
projection we obtain atomic surfaces X and Xi (i = 1, 2, 3, 4, 5) with respect to the letter i in the same
way as in the irreducible case. (See Fig. 1.)
In Section 3, 4 and 6, we define the tiling substitution τ ∗ of a substitution σ according to some modification of the method by [AI01]. Since we deal with the non-irreducible case, we can not use the same method
as in the irreducible case. However, we introduce new polygonal tiles instead of parallelograms, a tiling
substitution τ ∗ and the concept of a stepped surface; and try to construct atomic surfaces by using a map
b
τ ∗ and tilings Tτ ∗ with five polygonal prototiles and TτX∗ with the atomic surfaces Xi (i = 1, 2, 3, 4, 5).
(See Fig. 2 and Fig. 3.)
b := −X associated with non-irreducible subIn Section 5, we introduce two dynamical systems on X
stitutions, that is, a Markov transformation and a domain exchange transformation related to Property 1.1
84
Hiromi Ei and Shunji Ito
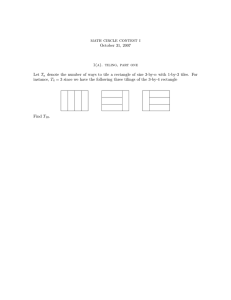
Fig. 1: The atomic surface X of the substitution σ in the case of K = 0
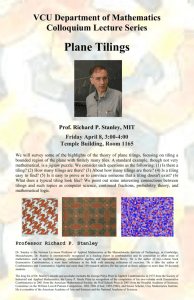
Fig. 2: The tiling Tτ ∗ in the case of K = 0
Tilings from some non-irreducible, Pisot substitutions
85
X5
X2
X3
X1
X4
Fig. 3: The tiling TτX∗ in the case of K = 0
b
(2) and (3). The main theorems in this paper are Theorem 5.2 and Theorem 5.3, and these theorems say
the following:
b →X
b is defined by
The domain exchange transformation E : X
E(x) = x − πei
ci
x∈X
bs , k = 0, 1, · · · . The
and the orbit of the origin point by the transformation E satisfies E k (0) ∈ X
k
transformation E is not measure-theoretically isomorphic to a rotation on the 2-dimensional torus, but
isomorphic to the induced transformation of a rotation on the torus.
2
Substitutions and atomic surfaces
2.1
General results on atomic surfaces
Let A be an alphabet consisting of d letters {1, 2, · · · , d} . The free monoid on the alphabet A with the
n
N
empty word is denoted by A∗ = ∪∞
n=0 A and A denotes the collection of all right infinite sequences
of symbols from A. Let σ be an endomorphism on A∗ such that σ(i) ∈ A∗ \ {} for all i ∈ A, which is
called a substitution. By defining σ(U V ) = σ(U )σ(V ) for a concatenation U V of words, the substitution
σ is extended to an endomorphism on A∗ and AN . Put
σ(i)
(i)
(i)
(i)
= W0 W1 · · · Wl(i) −1
(i)
(i)
(i)
= Pk Wk Sk
and
σ n (i)
(n,i)
= W0
(n,i)
= Pk
(n,i)
W1
(n,i)
Wk
(n,i)
· · · Wl(n,i) −1
(n,i)
Sk
,
86
Hiromi Ei and Shunji Ito
(i)
(n,i)
(i)
(i)
where P0 = P0
= for any i ∈ A and any positive integer n. We call Pk (resp., Sk ) the k-prefix
(resp., the k-suffix) of a word σ(i). We define the canonical homomorphism f : A∗ → Zd by f () = 0
and f (i) = ei (i ∈ A), where {ei }i=1,···d is the canonical basis of Rd . This is naturally extended to a
map on A∗ by defining f (U V ) = f (U ) + f (V ) for words U, V in A∗ . There is a matrix Lσ on Zd for a
substitution σ satisfying the following commutative diagram:
f
σ
A∗
↓
→
A∗
↓
d
Lσ
d
Z
→
f
Z
.
The matrix Lσ is called the incidence matrix of the substitution and its entry Lσ (i, j) is equal to the
number of occurrences of the letter i in σ(j).
Recall that a Pisot number is an algebraic integer greater than 1 and whose conjugates have modulus
strictly less than 1. Before discussing atomic surfaces of substitutions given by (1.1), we will define
atomic surfaces on a general setting with the following assumption:
Assumption Throughout this paper, we assume that for a substitution σ
(1)
(1) W0
= 1, that is, σ(1) begins with 1,
(2) σ is unimodular, that is, | det(Lσ ) |= 1,
(3) the characteristic polynomial of Lσ is not irreducible and is decomposed as f (x)g(x) such that
f (x) is a minimal polynomial of some Pisot number β, and the roots of g(x) have modulus 1.
A substitution with Assumption (2) and (3) is referred to be of unimodular, non-irreducible, Pisot type.
From Assumption (1), there exists a fixed point ω of the substitution σ:
ω = lim σ n (1) = s0 s1 · · · sn · · · .
n→∞
From Assumption (2) and (3), we define the expanding subspace L(u) spanned by the eigenvector u
corresponding to the eigenvalue β and the contractive subspace P 6= {0}(⊂ Rd ) corresponding to the
other conjugate eigenvalues of β. Then we have a direct sum Rd = P ⊕L(u)⊕P 0 , where P 0 corresponds
to the other eigenvectors coming from g(x). Let us define the projection π : Rd → P by
π(p + x + p0 ) = p,
where p ∈ P , x + p0 ∈ L(u) ⊕ P 0 .
Definition 2.1 From sets Zi , Zi0 of prefixes of a fixed point ω:
Zi
Zi0
:= {s0 s1 · · · sk−1 | sk = i, k = 1, 2, · · · }
:= {s0 s1 · · · sk | sk = i, k = 0, 1, · · · },
we define sets Yi , Yi0 in P as follows:
Yi
Yi0
:= πf (Zi ) = {πf (s0 s1 · · · sk−1 ) | sk = i, k = 1, 2, · · · }
:= πf (Zi0 ) = {πf (s0 s1 · · · sk ) | sk = i, k = 0, 1, · · · } .
Tilings from some non-irreducible, Pisot substitutions
87
The sets X, Xi , Xi0 in P are defined by
X
Xi
Xi0
:= cl.(∪di=1 Yi ) = cl.(∪di=1 Yi0 )
:= cl.(Yi )
:= cl.(Yi0 ) ,
where cl.S means the closure of a set S.
We call the sets X, Xi (i ∈ A) atomic surfaces of σ. Note that the equality Xi0 = Xi + πei holds from
= Yi + πei , where S + a = {x + a | x ∈ S}.
For words U = u0 u1 · · · ul , V = v0 v1 · · · vm ∈ A∗ , U ≺ V denotes that l < m and v0 v1 · · · vl = U .
The following proposition can be found in [AI01][FFIW00].
Yi0
Proposition 2.1 The following set equations hold:
L−1
σ Xi =
(1)
d
[
(j)
[
(Xj + L−1
σ πf (Pk ))
j=1 P (j) :W (j) =i
k
0
L−1
σ Xi =
(2)
d
[
k
[
(j)
(Xj0 − L−1
σ πf (Sk )) .
j=1 S (j) :W (j) =i
k
k
Remark 1 We will see the following property in Theorem 4.1 (4):
(j)
(j)
(j)
0
−1
the sets Xj + L−1
= i in the equation (1) (resp., (2)) do
σ πf (Pk ) (resp., Xj − Lσ πf (Sk )) with Wk
not overlap up to a set of Lebesgue measure 0.
Proof: From the property
cl.(
n
[
Ai ) =
i=1
n
[
cl.(Ai ),
i=1
it is enough to show that
f (Zi ) =
d
[
[
(j)
(Lσ f (Zj ) + f (Pk )).
(2.1)
j=1 P (j) :W (j) =i
k
k
Take s0 s1 · · · sn ∈ Zi with sn+1 = i, then there exists an integer m (m < n) such that
σ(s0 s1 · · · sm−1 ) ≺ s0 s1 · · · sn i σ(s0 s1 · · · sm ).
Consequently there exists an integer t such that
(sm )
s0 s1 · · · sn i = σ(s0 s1 · · · sm−1 )Pt
(sm )
where Wt
(sm )
Wt
,
= i. Let f act on both sides of the above equality,
(sm )
f (s0 s1 · · · sn i) = f (σ(s0 s1 · · · sm−1 )Pt
(sm )
Wt
).
88
Hiromi Ei and Shunji Ito
Hence, by f ◦ σ = Lσ ◦ f , we have
(sm )
f (s0 s1 · · · sn ) = Lσ f (s0 s1 · · · sm−1 ) + f (Pt
(s )
) .
(s )
Thus f (s0 s1 · · · sn ) ∈ Lσ f (Zsm ) + f (Pt m ) with Wt m = i. This shows ⊆ is true for the equality (2.1)
by choosing j = sm and k = t.
(j)
On the other hand, for any s0 s1 · · · sm ∈ Zj with sm+1 = j and Wk = i, we have
(j)
Lσ f (s0 s1 · · · sm ) + f (Pk )
(j)
= f (σ(s0 s1 · · · sm )) + f (Pk )
(j)
= f (σ(s0 s1 · · · sm )Pk ) .
Since sm+1 = j, then it is clear that
(j)
σ(s0 s1 · · · sm )Pk i σ(s0 s1 · · · sm sm+1 ) .
(j)
Therefore, σ(s0 s1 · · · sm )Pk ∈ Zi . This leads to the other direction of the equality (2.1). The second
set equation is shown by (1) and Xi = Xi0 − πei .
2
2.2
Atomic surfaces generated by the labeled graph G∗
To obtain a numerical representation of X or Xi as we will see in Theorem 2.1, we introduce the new
alphabet B and the subset Bσ∗ of the monoid B ∗ by using the prefix automaton as follows:
i
i∈A
B :=
|
,
ti
ti ∈ {0, 1, · · · , |σ(i)| − 1}
Bσ∗ :=
i0
i1
i
(i )
· · · N ∈ B ∗ | Wknn = in−1 (n = 1, 2, · · · , N ), N = 0, 1, · · · ,
k0
k1
kN
where |U | means the length of a word U . (See Fig. 4.)
σ(in−1 )=
@
@
@
σ(in ) =
in−1
H
HH kn th
HH
H
in
σ(in+1 )=
kn+1 th
Fig. 4: A subword
` in ´` in+1 ´
kn
kn+1
of a word in Bσ∗
Tilings from some non-irreducible, Pisot substitutions
89
We define a labeled graph G∗ such that the set of vertices is V = {1, 2, · · · , d} and the set of edges is
(j)
E = {0, 1, · · · , |σ(i0 )| − 1} with the largest |σ(i0 )| for i0 ∈ A. If Wk = i, that is, the letter i occurs
in σ(j) as k-th letter, then one edge from the vertex i to the vertex j named k is drawn. (See Fig. 5. cf.
[CS01])
k
i
j
(j)
Fig. 5: The edge k from the vertex i to the vertex j (Wk
= i)
From the definition of the labeled graph G∗ , the set Bσ∗ is given by all finite paths of
∗(i)
(cf. Fig 6). Define the subset Bσ
Bσ∗(i) :=
∗(i)
The set Bσ
vertex
in G∗
edge
of Bσ∗ :
i0
i1
i
(i )
· · · N ∈ Bσ∗ | Wk00 = i, N = 0, 1, · · · .
k0
k1
kN
is the set of all finite paths whose initial vertex is i in G∗ .
Theorem 2.1 For any substitution σ satisfying Assumption, the following equalities hold:
)
i0
i1
iN
(iN )
(iN )
∗(i)
|
···
∈ Bσ , PkN WkN ≺ ω, N = 0, 1, · · ·
= cl.
k0
k1
kN
n=0
(N
)
X
i
i
i
(i
)
(i
)
(i
)
1
= cl.
Lnσ πf (Pknn ) | 0
· · · N ∈ Bσ∗ , PkNN WkNN ≺ ω, N = 0, 1, · · · .
k0
k1
kN
(
Xi
X
N
X
(i )
Lnσ πf (Pknn )
n=0
Proof: We show
(
Yi =
N
X
n=0
(i )
Lnσ f (Pknn )
)
i0
i1
iN
(i
)
(i
)
|
···
∈ Bσ∗(i) , PkNN WkNN ≺ ω, N = 0, 1, · · · .
k0
k1
kN
By the proof in Proposition 2.1, for s0 s1 · · · sm ∈ Zi , there exist positive integers i0 , k0 , m0 such that
(i )
f (s0 s1 · · · sm ) = Lσ f (s0 s1 · · · sm0 ) + f (Pk00 )
and
(i )
Wk00 = i, s0 s1 · · · sm0 ∈ Zi0 .
90
Hiromi Ei and Shunji Ito
For s0 s1 · · · sm0 ∈ Zi0 , let us continue the same procedure. Because |s0 s1 · · · sml | is monotone decreasing with respect to l, at last we have the following equality:
f (s0 s1 · · · sm )
(i )
= Lσ f (s0 s1 · · · sm0 ) + f (Pk00 )
(i )
(i )
= Lσ (Lσ f (s0 s1 · · · sm1 ) + f (Pk11 )) + f (Pk00 )
= ···
(i −1 )
(iN )
(i )
N −1
= LN
f (PkNN−1
) + · · · + f (Pk00 ) ,
σ f (PkN ) + Lσ
where
i0
k0
i1
k1
(
Yi ⊆
···
N
X
n=0
iN
kN
∗(i)
∈ Bσ . This shows
(i )
Lnσ f (Pknn )
)
i0
i1
iN
(iN )
(iN )
∗(i)
|
···
∈ Bσ , PkN WkN ≺ ω, N = 0, 1, · · · .
k0
k1
kN
We obtain the converse inclusion as in the proof of Proposition 2.1. Thus the first equality is proved.
Analogously we prove the second one.
2
From the above decomposition of f (s0 s1 · · · sm ), we have the following corollary:
Corollary 2.1 For any substitution which satisfies Assumption, the atomic surface X is bounded.
2.3
Atomic surfaces corresponding to a substitution given by (1.1)
From now on, let us deal with the non-irreducible, Pisot, unimodular substitutions σ given by (1.1):
K+1 times
z }| {
1 → 11 · · · 1 2
2 → 3
3 → 4
σ :
K times
z }| {
4 → 1···1 5
5 → 1
.
In this case,
K +1
1
Lσ =
0
0
0
0
0
1
0
0
0 K
0 0
0 0
1 0
0 1
1
0
0
.
0
0
We see that the characteristic polynomial of the incidence matrix Lσ is given by (1.2) and it is also the
characteristic polynomial of β (cf. [PAR60]). It is easy to check that the equation x3 − Kx2 − (K + 1)x −
1 = 0 gives one real root β and two imaginary roots β (2) , β (2) if K ≤ 2, or three real roots β, β (2) , β (3)
if K ≥ 3. The five roots of x5 − (K + 1)x4 − Kx − 1 = 0 are denoted by λi (i = 1, 2, 3, 4, 5), where
λ1 = β (2) , λ2 = β (2) , λ3 = β if K ≤ 2, or λ1 = β (2) , λ2 = β (3) , λ3 = β if K ≥ 3, and λ4 , λ5
are the imaginary roots of x2 − x + 1 = 0. Choose any eigenvector ui associated with the eigenvalue
Tilings from some non-irreducible, Pisot substitutions
91
λi (i = 1, 2, 3, 4, 5) such that u2 = u1 if K ≤ 2 and u5 = u4 . Put
1
v 1 = 21 (u2 + u1 ), v 2 = 2i
(u2 − u1 ), v 3 = u3 , v 4 = 21 (u5 + u4 ), v 5 =
v 1 = u1 ,
v 2 = u2 ,
v 3 = u3 , v 4 = 21 (u5 + u4 ), v 5 =
and let us define the 5 × 5 matrix V by
1
2i (u5
1
2i (u5
− u4 ) if K ≤ 2 ,
− u4 ) if K ≥ 3 ,
V := (v 1 , v 2 , v 3 , v 4 , v 5 ).
The real vectors v i (i = 1, 2, 3, 4, 5) and the real matrix V satisfy the following relation:
R
0
Lσ V = V
0
0
0
0
0
0
0
β
0
0
0
0
0
0
0
0
,
<[λ4 ] −=[λ4 ]
=[λ4 ] <[λ4 ]
where <[a] (resp., =[a]) means the real (resp., imaginary) part of a and
<[β (2) ] −=[β (2) ]
if K ≤ 2
(2)
(2)
] <[β
]
=[β
R=
.
β (2)
0
if
K
≥
3
0
β (3)
The space P <v 1 ,v 2 > spanned by vectors v 1 , v 2 is an invariant contractive space of the linear transformation Lσ . More precisely, we know
x
Lσ x = (v 1 , v 2 )R 1 ,
x2
where x = x1 v 1 + x2 v 2 ∈ P <v 1 ,v 2 > , x1 , x2 ∈ R. We have the direct sum R5 = P <v 1 ,v 2 > ⊕ L(v 3 ) ⊕
P 0<v 4 ,v 5 > , where P 0<v 4 ,v 5 > is spanned by v 4 , v 5 ; and define the projection map π : R5 → P <v 1 ,v 2 >
by
π(x1 v 1 + x2 v 2 + x3 v 3 + x4 v 4 + x5 v 5 ) = x1 v 1 + x2 v 2 , xi ∈ R (i = 1, 2, 3, 4, 5).
It is easy to see that
0
0
πei = v1i
v 1 + v2i
v2 ,
0
where V −1 = (vij
) 1≤i≤5 .
1≤j≤5
By Proposition 2.1, in this case we obtain equations in concrete terms as stated in the following corollary:
Corollary 2.2 For the substitution σ given by (1.1), the sets {Xi }i=1,2,3,4,5 given in Theorem 2.1 satisfy
the following set equations:
92
Hiromi Ei and Shunji Ito
(1)
X1 ∪ X5
K
K−1
[
[
=
−1
(X1 + nLσ πe1 ) ∪
(X4 + nL−1
σ πe1 ) ∪ X5
L−1
σ X1
n=0
L−1
σ X2
−1
Lσ X3
L−1
σ X4
−1
Lσ X5
=
=
=
=
if K = 0
if K ≥ 1 ,
n=0
X1 + (K + 1)L−1
σ πe1 ,
X2 ,
X3 ,
X4 + KL−1
σ πe1 ,
(2)
0
L−1
σ X1
0
−1
0
(X1 − Lσ πe2 ) ∪ X5
K
K−1
[
[
=
0
−1
0
(X
(X40 − L−1
−
L
π(e
+
ne
))
∪
2
1
σ
σ π(e5 + ne1 )) ∪ X5
1
n=0
0
L−1
σ X2
0
L−1
σ X3
0
L−1
σ X4
0
L−1
σ X5
if K = 0
if K ≥ 1 ,
n=0
X10 ,
X20 ,
X30 ,
X40 .
=
=
=
=
For the substitution σ, the alphabet B and the graph G∗ are as follows:
1
1
1
2
3
4
4
4
5
B=
,
,··· ,
,
,
,
,
,··· ,
,
.
0
1
K +1
0
0
0
1
K
0
(j)
From the definition of σ given by (1.1), we have f (Pk ) = ke1 forany j ∈{1, 2, 3, 4, 5}. Hence it is
enough to take only the path (k0 , k1 , · · · , kN ) of the edges in ki00 ki11 · · · kiNN ∈ B ∗ . Then the set X is
written as follows:
(N
)
X
(i
)
(i
)
(i
)
X = cl.
Lnσ πf (Pknn ) | ki00 ki11 · · · , kiNN ∈ Bσ∗ , PkNN WkNN ≺ ω, N = 0, 1, · · ·
n=0
(
= cl.
N
X
)
kn Lnσ πe1
∗
| t(kn ) = i(kn+1 ) in G , N = 0, 1, · · ·
,
n=0
where t(e) ∈ V (resp., i(e)) means the terminal (resp., the initial) vertex of an edge e. The condition
4
(i )
(i )
PkNN WkNN ≺ ω in the first line of the above equality means kiNN ∈ B \ { 20 , 30 , K
} by the definition
iN
4
of σ, but we can omit this condition for the following reason: Let us consider the case kN = K
, that is,
i1 4
iN −1
i0
∗
∗
the path in Bσ is written as k0 k1 · · · kN −1 K . From the graph G in Fig. 6, the path is determined
4
PN
(i )
as ki00 · · · kN1−2 50 K
, and it provides the same summation n=0 Lnσ πf (Pknn ) as the one for the path
Tilings from some non-irreducible, Pisot substitutions
93
0
.K
.
..
0
1
1
0
K+1
2
5
0
0
3
1
0
2
5
K-1
0..
0
4
3
K
4
0
K => 1
0
K=0
Fig. 6: The graph G∗
i0
k0
1
4
· · · kN1−2 10 K
. Therefore we can allow kiNN = K
. The other cases
shown analogously.
Moreover, from the labeled graph G∗ , the sets {Xi }i=1,2,3,4,5 are given by
(
Xi = cl.
N
X
kn Lnσ πe1
n=0
iN
kN
i(k0 ) = i, t(kn ) = i(kn+1 ) in G∗
|
N = 0, 1, · · ·
)
This leads to the following corollary:
Corollary 2.3 An element in the atomic surface X has an infinite expansion, that is,
(∞
)
X
n
∗
X=
kn Lσ πe1 | t(kn ) = i(kn+1 ) in G
.
n=0
Example 2.1 Let us consider the case of K = 0. The substitution σ is
1 → 12
2 → 3
3 → 4
σ :
.
4
→
5
5 → 1
=
.
2
0
or
3
0
can be
94
Hiromi Ei and Shunji Ito
By the labeled graph G∗ in Fig. 6, the following admissible conditions hold for the sequence of digits
{kn }:
(∞
)
X
n
∗
kn Lσ πe1 | t(kn ) = i(kn+1 ) in G
X =
n=0
∞
X
(
=
)
kn Lnσ πe1
| kn = 1 ⇒ kn+1 = kn+2 = kn+3 = kn+4 = 0
.
n=0
3
3.1
A tiling with polygonal tiles of the plane P<v1 ,v2 >
A tiling substitution τ ∗
In this subsection we introduce a tiling substitution τ ∗ associated with σ according to [AI01]. From now
on let σ be a substitution given by (1.1) in Section 1. Then we have the direct sum R5 = P <v 1 ,v 2 > ⊕
L(v 3 ) ⊕ P 0<v 4 ,v 5 > , and the map π is a projection from R5 to the 2-dimensional plane P <v 1 ,v 2 > .
Lemma 3.1 The following relations hold:
πe3 + πe4 = πe1 , πe4 + πe5 = πe1 + πe2 , πe5 = πe2 + πe3 .
Proof: We check that we can choose the vector t (−1, 0, 1, 1, 0) = −e1 + e3 + e4 as the vector v 5 . Since
v 5 is mapped to 0 by the projection π, we have
−πe1 + πe3 + πe4 = 0.
2
From the fact that Lσ ◦ π = π ◦ Lσ , we have the second and third equalities.
∗
5
We introduce Z-modules F and F using finite integer combinations of elements of Z × {1, 2, 3, 4, 5}
and Z5 × {1∗ , 2∗ , 3∗ , 4∗ , 5∗ } as follows:
X
Fu :=
nδ δ | nδ ∈ Z, # {δ ∈ Z5 × {1, 2, 3, 4, 5} | nδ 6= 0} < ∞ ,
5
δ∈Z ×{1,2,3,4,5}
Fu∗ :=
X
δ∈Z5 ×{1∗ ,2∗ ,3∗ ,4∗ ,5∗ }
nδ δ | nδ ∈ Z, # {δ ∈ Z5 × {1∗ , 2∗ , 3∗ , 4∗ , 5∗ } | nδ =
6 0} < ∞ .
PN
From Lemma 3.1 we can introduce the equivalence relation ∼ on Fu (resp., Fu∗ ) defined by k=1 (xk , ik ) ∼
PN
PN
P
N
∗
∗
k=1 (y k , ik ) if πxk = πy k for all k (resp.,
k=1 (y k , ik ) if πxk = πy k for all k)
k=1 (xk , ik ) ∼
∗
∗
and we set F := Fu / ∼ (resp., F := Fu / ∼). F will be used in Section 4 mainly.
To give a geometrical meaning of (x, i∗ ), first we define the map π1 : F → P <v 1 ,v 2 > , which gives a
one dimensional geometric representation of the symbolic object (x, i), by
π1 (x, i) = {πx + tπei | 0 ≤ t ≤ 1} ,
Tilings from some non-irreducible, Pisot substitutions
PN
where for k=1 nk (xk , ik ) ∈ F with nk ∈ Z − {0}
!
N
N
X
[
π1
nk (xk , ik ) =
π1 (xk , ik ) .
k=1
95
k=1
(See Fig. 7.)
πe 2
π e4
π 1 ( 0, 4 )
π 1 ( 0, 1 )
π 1 ( 0, 2 )
.0
π e5
π 1 ( 0, 5 )
πe 1
π 1 ( 0, 3 )
π e3
Fig. 7: Representation of π1 (0, i) (i = 1, 2, 3, 4, 5)
A set consisting of three vectors {a, b, c} (a, b, c ∈ R2 ) is called a hexa-generator if the domain
{t1 a + s1 b, t2 a + s2 c, t3 b + s3 c | 0 ≤ ti ≤ 1, 0 ≤ si ≤ 1, i = 1, 2, 3}
is a hexagon. (See Fig. 8.)
Lemma 3.2 {πe2 , πe3 , πe4 } and {−πe1 , −πe5 , −πe1 − πe2 } are hexa-generators.
Proof: We show {πe2 , πe3 , πe4 } is a hexa-generator.
The other part can be shown analogously.
2
For x = xx12 ∈ R2 , n(x) denotes −x
,
that
is,
a normal vector of x. We can calculate the cox1
ordinates of πei (i = 1, 2, 3, 4, 5) and easily check that every n(π(e2 )) · π(e4 ), n(π(e4 )) · π(e3 ) and
n(π(e3 )) · π(e2 ) has the same signature, where a · b means the inner product for a, b ∈ R2 . Therefore
{πe2 , πe3 , πe4 } is a hexa-generator. (See Fig. 8.)
2
From Lemma 3.1 and Lemma 3.2, we can consider the map π2 : F ∗ → P <v 1 ,v 2 > , which gives a
two-dimensional geometric representation of the symbolic object (x, i∗ ), by
π2 (0, 1∗ )
π2 (0, 2∗ )
π2 (0, 3∗ )
π2 (0, 4∗ )
π2 (0, 5∗ )
π2 (x, i∗ )
=
=
=
=
=
=
[π1 (0, 2), π1 (0, 5), π1 (e2 , 3)]
[π1 (0, 1), π1 (0, 3), π1 (e3 , 4)]
[π1 (0, 2), π1 (0, 4), π1 (e2 , 1), π1 (e4 , 5)]
[π1 (0, 3), π1 (0, 5), π1 (e3 , 2)]
[π1 (0, 1), π1 (0, 4), π1 (e4 , 3)]
π2 (0, i∗ ) + πx ,
96
Hiromi Ei and Shunji Ito
πe 2
π e4
- πe 1
- π e5
.0
.0
- πe 1- πe 2
π e3
Fig. 8: Hexa-generators {πe2 , πe3 , πe4 } and {−πe1 , −πe5 , −πe1 − πe2 }
where [x, y, · · · , z] is the convex hull of the segments x, y, · · · , z and for
nk ∈ Z − {0}
!
N
N
X
[
∗
π2
nk (xk , ik ) =
π2 (xk , ik ∗ ) .
k=1
PN
k=1
nk (xk , ik ∗ ) ∈ F ∗ with
k=1
(See. Fig. 9.)
2
2
2
2
2
2
2
2
2
2
Fig. 9: Representation of (0, i∗ ), (ei , i∗ ) and U 0 , U
By analogy with the definition of E1∗ (σ) in [AI01], let us define the endomorphism τ ∗ on F ∗ called a
tiling substitution associated with σ, by
τ ∗ (x, i∗ ) :=
5
X
X
(j)
−1
∗
(L−1
σ x + Lσ f (Sk ), j ) .
(3.1)
j=1 S (j) :W (j) =i
k
k
We remark that the sign is plus here in this definition with respect to the sign minus in Formula (2) in
Proposition 2.1. (See Remark 4 in Section 4.)
Tilings from some non-irreducible, Pisot substitutions
97
Remark 2 For the substitution σ given by (1.1), the tiling substitution τ ∗ is defined explicitly by
∗
−1
∗
(L−1
σ x + e1 − e5 , 1 ) + (Lσ x, 5P)
PK+1
τ ∗ (x, 1∗ ) =
K
−1
∗
−1
∗
−1
∗
n=1 (Lσ x + e1 − ne5 , 1 ) +
n=1 (Lσ x + e4 − ne5 , 4 ) + (Lσ x, 5 )
if K = 0
if K ≥ 1
τ ∗ (x, 2∗ )
τ ∗ (x, 3∗ )
τ ∗ (x, 4∗ )
τ ∗ (x, 5∗ )
=
=
=
=
∗
(L−1
σ x, 1 ) ,
∗
(L−1
σ x, 2 ) ,
∗
(L−1
σ x, 3 ) ,
−1
(Lσ x, 4∗ ) .
(See Fig. 10.)
π2 (τ ∗ (0, i∗ ))
K
∗
L−1
σ (π2 (0, i ))
times
Fig. 10: The tiling substitution τ ∗
Remark 3 The formula of the tiling substitution τ ∗ can be found in [AI01] under the notation E1∗ (σ).
But the geometrical meaning of (x, i∗ ) (i = 1, 2, 3, 4, 5) is different. In [AI01] we mean by (x, i∗ ) a unit
,
98
Hiromi Ei and Shunji Ito
cube of dimension four in R5 and a cube (x, i∗ ) projected by π is a good prototile for the tiling of R4 for
an irreducible substitution, however, for a non-irreducible substitution which we deal with now, a cube
(x, i∗ ) projected by π does not work as prototile of a tiling of the contractive space P <v 1 ,v 2 > . In this
section we will see that the tiles π2 (x, i∗ ) given by Fig. 9 work well.
P5
P5
∗
0
∗
∗
We define U =
i=1 (ei , i ), U =
i=1 (0, i ) as the union of these five elements in F . (See
Fig. 9.)
Proposition 3.1 The following relations hold:
τ ∗ (U) ⊃ U, τ ∗ (U 0 ) ⊃ U 0 ,
where for V, W ∈ F ∗ , V ⊃ W means that π2 (V) ⊃ π2 (W), and that there exists W 0 =
F ∗ with ni > 0 for all i such that V = W + W 0 ; moreover,
PN
k=1
nk (xk , i∗i ) ∈
τ ∗ (U) − τ ∗ (U 0 ) = U − U 0
and for any positive integer n
τ ∗ n (U) − τ ∗ n (U 0 ) = U − U 0 .
Proof: From the definition of τ ∗ , we see
∗
if K = 0
U + (e1 − e5 , 1 )
K
K+1
∗
X
X
τ (U) =
∗
∗
if K ≥ 1
(L−1
(L−1
σ x + e4 − ne5 , 4 )
σ x + e1 − ne5 , 1 ) +
U+
n=1
n=1
0
∗
if K = 0
U + (e1 − e5 , 1 )
K
K+1
∗
0
X
X
τ (U ) =
∗
∗
0
if K ≥ 1 .
(L−1
(L−1
σ x + e4 − ne5 , 4 )
σ x + e1 − ne5 , 1 ) +
U +
n=1
Therefore, we know τ ∗ (U) − τ ∗ (U 0 ) = U − U 0 .
n=1
2
The replacing and re-dividing method
∗
Observe the two domains π2 (τ ∗ (x, i∗ )) and L−1
σ (π2 (x, i )), then we have the following three cases (See
Fig. 10.):
∗
(1) π2 (τ ∗ (x, i∗ )) = L−1
σ (π2 (x, i )) (i = 2, 5)
∗
(2) π2 (τ ∗ (x, i∗ )) ⊂ L−1
σ (π2 (x, i )) (i = 3, 4)
∗
(3) π2 (τ ∗ (x, i∗ )) ⊃ L−1
σ (π2 (x, i )) (i = 1)
In the case where i = 1, 3, 4, each of these domains π2 (x, i∗ ) (i = 1, 3, 4) contains at least one edge
of the form π1 (y, 2) and one edge of the form π1 (y 0 , 5), so we introduce the following “replacing and
∗
re-dividing” method to get the domain π2 (τ ∗ (x, i∗ )) from the domain L−1
σ (π2 (x, i )).
Tilings from some non-irreducible, Pisot substitutions
99
−1
∗
First, we “replace” every edge L−1
σ π1 (y, 2) on Lσ (π2 (x, i )) (i = 1, 3, 4) with
π1 {(L−1
σ y, 1) +
K+1
X
(L−1
σ y + e1 − ne5 , 5)},
n=1
0
−1
∗
what is more, in the case of K ≥ 1, replace every edge L−1
σ π1 (y , 5) on Lσ (π2 (x, i )) (i = 1, 3, 4) with
0
π1 {(L−1
σ y , 4) +
K
X
0
(L−1
σ y + e4 − ne5 , 5)}.
n=1
∗
∗
By this procedure, we have π2 (τ (x, i )) in the case of i = 3, 4.
Secondly, we “re-divide” the domain in the case of i = 1 (i.e. π2 (τ ∗ (x, 1∗ ))). Then, we have
π2 (τ ∗ (x, i∗ )). (See Fig. 11.)
L σ-1 π 1 ( 0 , 5 )
-1
Lσ
K
replacing
times
re-dividing
L σ-1 π 1 ( 0 , 2 )
∗
Fig. 11: The replacing and re-dividing method for the domain L−1
σ (π2 (x, 1 ))
3.2
A tiling of the plane P<v1 ,v2 > generated by τ ∗
We construct a first quasi-periodic tiling of P <v 1 ,v 2 > with five polygonal prototiles generated by the
tiling substitution τ ∗ associated to σ. (See Fig. 2 in Section 1.) This tiling corresponds to the projection
of a discrete plane approximation (stepped surface) in the Pisot case. First we will see the property of
non-overlap.
Proposition 3.2 The sets π2 (τ ∗ n (U)) (resp., π2 (τ ∗ n (U 0 ))) consisting of five prototiles of the form π2 (x, i∗ )
(i = 1, 2, 3, 4, 5) do not overlap for any positive integer n.
∗n
Proof: Suppose that the pieces of π2 (τ ∗ n (U)) do not overlap, then the pieces of L−1
(U)) do
σ π2 (τ
∗ n+1
−1
not overlap. By the replacing and re-dividing method, we obtain π2 (τ
(U)) from Lσ π2 (τ ∗ n (U)).
Therefore, to show the pieces of π2 (τ ∗ n+1 (U)) do not overlap, it is enough to show that replaced edges
∗n
on L−1
(U)) do not cause overlap. From (3) in the replacing and re-dividing method, it is possible
σ π2 (τ
that overlaps occur by replacing edges on π2 (x, 1∗ ). We list the pairs of tiles which are just touching with
the segment π1 (x, 2) or π1 (x, 5) on π2 (x, 1∗ ), which are given by
{(x, 1∗ ), (x − e3 , 4∗ )}, {(x, 1∗ ), (x, 3∗ )}, {(x, 1∗ ), (x, 4∗ )}, {(x, 1∗ ), (x − e4 , 3∗ )} .
−1
∗
We deal with the pair {(x, 1∗ ), (x−e3 , 4∗ )}. The edge which substitutes for L−1
σ π1 (x, 2) on Lσ π2 (x, 1 )
−1
∗
−1
∗
is not included in the domain Lσ π2 (x, 1 ), but in the adjoining domain Lσ π2 (x − e3 , 4 ). Moreover,
100
Hiromi Ei and Shunji Ito
the edge does not cross the other edges. Thus there is no overlap by replacing edges. We see other cases
analogously. (See Fig. 12.)
In the case where π1 (x, i) (i = 2, 5) in π2 (x, 1∗ ) is a part of the boundary of π2 (τ ∗ n (U)), it is easy to
see that replacing edges do not cause overlap.
2
π 2 ( x-e , 4* )
3
π1(x, 2 )
L σ-1
replacing
π 2 ( x , 1* )
L σ-1 π 1 ( x , 2 )
π 2 ( x , 3 *)
π1(x, 5 )
π 2 ( x , 4 *)
L σ-1 π 1 ( x , 5 )
π 2 ( x-e , 3 *)
4
Fig. 12: Four pairs including (x, 1∗ )
Secondly we consider the covering of the plane P <v 1 ,v 2 > by π2 (τ ∗ n (U)).
∗n
Proposition 3.3 ∪∞
(U)) = P <v 1 ,v 2 > , that is, π2 (τ ∗ n (U)) covers the plane as n goes to ∞.
n=1 π2 (τ
The proof of this proposition is long and not easy. So the detail of this proof is put in Section 6. In the
irreducible case, we can prove the property in Proposition 3.3 by using the notion of stepped surface of a
substitution σ (cf. [AI01]), but here we must prove it without such a notion. That is the reason why the
proof is difficult.
The following proposition is deduced from Proposition 3.2 and Proposition 3.3:
Proposition 3.4 The sets τ ∗ n (U) generate a tiling of the plane P <v 1 ,v 2 > , that is,
Tτ ∗ := {π2 (x, i∗ ) | (x, i∗ ) ⊂ τ ∗ n (U) f or some n}
is a tiling of P <v 1 ,v 2 > . (See Fig. 2 in Section 1.)
Tilings from some non-irreducible, Pisot substitutions
101
Finally we discuss the periodicity of the tiling Tτ ∗ . Let us introduce the following notation:
G ∗ := {(x, i∗ ) ∈ F ∗ | (x, i∗ ) ⊂ τ ∗ n (U) f or some n},
that is, Tτ ∗ = {π2 (x, i∗ ) | (x, i∗ ) ∈ G ∗ }, and we also introduce the new prototiles (x, ie∗ ) based on πx
f∗ defined by
and the tiling associated to G
(x, ie∗ ) := τ ∗ (Lσ x, i∗ ) for (Lσ x, i∗ ) ∈ G ∗ ,
f∗ := {(x, ie∗ ) | (Lσ x, i∗ ) ∈ G ∗ } .
G
f∗ following the method in Subsection 3.1.
So we have the ordinary tiling Tτ ∗ by dividing the prototiles in G
∗
We say G (or Tτ ∗ ) is periodic if there exists at least one non-zero period p ∈ R5 such that (x, i∗ ) ∈ G ∗
implies (x + p, i∗ ) ∈ G ∗ .
f∗ also has the period p.
Lemma 3.3 If p is a non-zero period of G ∗ , then G
Proof: Assume G ∗ has a non-zero period p. At first we consider the periodicity of the tiles of the form
f∗ . Note that the only τ ∗ (x, 1∗ ) in the images by τ ∗ includes a tile of the form (y, 5∗ ),
(x, 1e∗ ) in G
f∗ if and only if (x, 5∗ ) ∈ G ∗ . Suppose (x, 1e∗ ) ∈ G
f∗ , then (x, 5∗ ) ∈ G ∗ , and so
that is, (x, 1e∗ ) ∈ G
f∗ . It means that p is also a
(x + p, 5∗ ) ∈ G ∗ by the assumption, and finally we have (x + p, 1e∗ ) ∈ G
∗
f∗ except
e
period for the tiles of the form (x, 1 ). Now we want to observe the periodicity for the tiles in G
∗
e
the tiles (x, 1 ). Put
D
e
D
f∗ }
:= {(y, j ∗ ) ∈ G ∗ | (y, j ∗ ) ⊂ (x, 1e∗ ) f or some (x, 1e∗ ) ∈ G
f∗ } .
:= {(x, 1e∗ ) | (x, 1e∗ ) ∈ G
e has a period p. This means that D is closed for the translation
From the above discussion we know that D
by p, and has the same period p. Thus G ∗ − D also has a period p by the assumption. After projection by
f∗ − D
e provide the same covering of P<v ,v > with many holes by the equality
π2 , G ∗ − D and G
1
2
∗
(x, ie∗ ) = (x, (i − 1) ) (i = 2, 3, 4, 5) .
f∗ − D
e has a period p. Therefore, G
f∗ has a period p.
So G
2
Theorem 3.1 The tiling Tτ ∗ is not periodic.
Proof: Suppose the tiling Tτ ∗ is periodic, that is, G ∗ is periodic. Since G ∗ is a discrete set, there exists
a non-zero and minimum period p of G ∗ , where a minimum period is a period whose norm k πp k is
f∗ . Define the map ι∗ : G
f∗ → G ∗ by
minimum. From Lemma 3.3, p is also a period of G
ι∗ (x, ie∗ ) = (Lσ x, i∗ ) (i = 1, 2, 3, 4, 5) .
By the definition of Ge∗ , ι∗ (x, ie∗ ) is in G ∗ , that is, ι∗ is well-defined. Moreover, it is a bijection and the
inverse is given by
∗
∗
e∗
ι∗ −1 (y, i∗ ) = (L−1
σ y, i ) for (y, i ) ∈ G .
102
Hiromi Ei and Shunji Ito
f∗ implies ι∗ (x, je∗ ) = (Lσ x, j ∗ ) ∈ G ∗ , ι∗ (x+p, je∗ ) = (Lσ x+Lσ p, j ∗ ) ∈
Hence, (x, je∗ ), (x+p, je∗ ) ∈ G
∗
G . This means π(Lσ p) is a period of the tiling Tτ ∗ . On the other hand, Lσ is contractive on P <v 1 ,v 2 > .
Therefore, it contradicts the minimality of the period p.
2
Definition 3.1 A tiling T = {Tλ | λ ∈ Λ, Tλ is a tile on P } of the space
S P is called a quasi-periodic
tiling if for any r > 0 there exists R > 0 such that any patch γ = λ0 ∈Λ0 ⊂Λ Tλ0 whose diameter is
#
Λ0 <∞
smaller than r occurs somewhere in a neighbourhood of radius R of any point.
For γ, δ ∈ F ∗ , γ δ denotes that there exists z ∈ Z5 such that Mz γ ⊃ δ, where Mz is the translation
map given by
Mz (
N
X
∗
nk (xk , ik )) =
k=1
for
PN
k=1
N
X
nk (xk + z, ik ∗ )
k=1
nk (xk , ik ∗ ) ∈ F ∗ .
Theorem 3.2 The tiling Tτ ∗ is quasi-periodic.
Proof: Take any r > 0. There exists a positive integer N such that τ ∗ N (U) γ, for any γ ∈ G ∗
satisfying the diameter of π2 (γ) is smaller than r, because the number of such γ’s is finite. From
τ ∗ 8 (ei , i∗ ) ⊃ τ ∗ 4 (e1 , 1∗ ) ⊃ U for any i = 1, 2, 3, 4, 5, putting M=N+8, we have
τ ∗ M (ei , i∗ ) γ
(i = 1, 2, 3, 4, 5).
By the definition of G ∗ , for any (x, i∗ ) ∈ G ∗ there exists (y, j ∗ ) ∈ G ∗ such that
(x, i∗ ) ⊂ τ ∗ M (y, j ∗ ).
Therefore, we have
UR (x) ⊃ π2 (τ ∗ M (y, j ∗ )) ,
where R = maxi=1,2,3,4,5 diam.(π2 (τ ∗ M (ei , i∗ ))) and UR (x) means the neighbourhood of x with the
radius R. Thus, UR (x) contains any configuration of π2 (γ) whose diameter is smaller than r.
2
4
Atomic surfaces given by τ ∗ and a second tiling
In Section 2 we constructed atomic surfaces X, Xi (i = 1, 2, 3, 4, 5) from the fixed point of a substitution and the projection map π. In Subsection 4.1 we generate the atomic surfaces by using the tiling
substitution τ ∗ ; and by the virtue of this construction, we can observe the boundaries of atomic surfaces
in Subsection 4.2; and in Subsection 4.3 we obtain a second tiling with atomic surfaces by replacing the
polygonal tiles on the first tiling Tτ ∗ by atomic surfaces.
Tilings from some non-irreducible, Pisot substitutions
4.1
103
Atomic surfaces given by τ ∗
(i) 0
(i)
Definition 4.1 Define the domains Dn , Dn , (resp., Dn 0 , Dn
) as follows:
Dn
Dn(i)
Dn 0
:= π2 (τ ∗ n (U))
:= π2 (τ ∗ n (ei , i∗ ))
:= π2 (τ ∗ n (U 0 ))
0
:= π2 (τ ∗ n (0, i∗ )).
Dn(i)
(i)
Theorem 4.1 We take a renormalization of the domains Dn , Dn , then
(1) the following limit sets exist in the sense of the Hausdorff metric:
ci
X
:=
c0
X
i
:=
lim Lnσ Dn(i)
n→∞
lim Lnσ Dn(i)
0
n→∞
and they satisfy the relations:
c0 + πei , (X
c0 ,
ci = X
b :=) ∪5i=1 X
ci = ∪5i=1 X
X
i
i
(2) the following inequality holds:
c1 )
c1 )
µ(X
µ(X
c
c
µ(X2 )
µ(X2 )
Lσ . ≥ β
.. ;
.
.
.
c5 )
c5 )
µ(X
µ(X
c1 ), µ(X
c2 ), · · · , µ(X
c5 )) is an eigenvector of Lσ with respect
moreover, the vector of volumes t (µ(X
to the maximum eigenvalue β, where µ is the Lebesgue measure,
(3) the following set equations hold:
c
L−1
σ Xi
=
5
[
(j)
[
cj − L−1
(X
σ πf (Pk ))
j=1 P (j) :W (j) =i
k
k
c0
L−1
σ Xi
=
5
[
[
(j)
c0 + L−1 πf (S )) ,
(X
σ
j
k
j=1 S (j) :W (j) =i
k
k
(4) the sets in the right side of the equation in (3) do not overlap up to a set of Lebesgue measure 0.
The proof of the theorem can be obtained by a quite similar way as in [AI01] following Lemma 11,
Lemma 12 and Corollary 2.
104
Hiromi Ei and Shunji Ito
ci and the atomic surfaces Xi . By Proposition 2.1, we
Remark 4 We can find a relationship between X
have the following equation for the atomic surfaces Xi :
5
[
L−1
σ (−Xi ) =
(j)
[
((−Xj ) − L−1
σ f (Pk )).
j=1 P (j) :W (j) =i
k
k
ci (i = 1, 2, 3, 4, 5) satisfy the same set equations. Since Lσ is a contractive
This means −Xi and X
transformation on the plane P <v 1 ,v 2 > and from the uniqueness of self-affine sets (See Theorem 1 in
[MW88] for the uniqueness.), we have the following relation
ci
−Xi = X
(i = 1, 2, 3, 4, 5).
ci (i = 1, 2, 3, 4, 5) of X.
b From the
Remark 5 We are interested in the disjointness of the partitions X
∗4
∗
c
property τ (e1 , 1 ) ⊃ U, any Xi is included in the right side of the equation
c
L−4
σ X1 =
5
[
[
(4,j)
cj − L−4 πf (P
(X
σ
k
)) ,
j=1 P (4,j) :W (4,j) =1
k
k
thus by Theorem 4.1 (4), for any i, j (i 6= j)
ci ∩ X
cj ) = 0 .
µ(X
This property of disjointness holds for substitutions satisfying the strong coincidence property in [AI01].
4.2
Boundaries of atomic surfaces
b X
ci . One of our aims here is to
In this subsection we will observe the boundaries of atomic surfaces X,
c1 . For that we will
obtain Proposition 4.1, which says that the origin is an inner point of the domain X
show that the distance between the origin point and the boundary is positive by studying the boundary.
We introduce an endomorphism τ on F as follows (See Fig. 13.):
τ (x, 1)
=
(L−1
σ x, 5)
τ (x, 2)
=
(L−1
σ x, 1) −
τ (x, 3)
τ (x, 4)
=
=
τ (x, 5)
=
(L−1
σ x, 2)
(L−1
σ x, 3)
(L−1
σ x, 4)
−1
(Lσ x, 4)
K+1
X
(L−1
σ x + e1 − ne5 , 5)
n=1
−
PK
−1
n=1 (Lσ x
if K = 0
+ e4 − ne5 , 5) if K ≥ 1
∗
Define the boundary map ∂F ∗ : F → F as follows:
∂F ∗ (x, 1∗ ) = −(x, 2) + (x, 5) − (x + e2 , 3)
∂F ∗ (x, 2∗ ) = (x, 1) − (x, 3) − (x + e3 , 4)
∂F ∗ (x, 3∗ ) = (x, 2) − (x, 4) + (x + e2 , 1) − (x + e4 , 5)
∂F ∗ (x, 4∗ ) = (x, 3) − (x, 5) + (x + e3 , 2)
∂F ∗ (x, 5∗ ) = −(x, 1) + (x, 4) + (x + e4 , 3) .
Tilings from some non-irreducible, Pisot substitutions
105
−
τ
( 0,1 )
L σ-1 π 1 ( 0 , 2 )
−
τ
K+1 times
( 0,2 )
−
τ
( 0,3 )
−
τ
( 0,4 )
K times
−
τ
( 0,5 )
L σ-1 π 1 ( 0 , 5 )
Fig. 13: Geometrical meaning of τ
The following diagram is commutative:
∂F ∗
τ∗
F∗
↓
F
F∗
↓
τ
→ F
→
∂F ∗ ,
and from the definition of the maps π1 , π2 , we have
∂F ∗
F∗
↓
F
π
→2 P <v 1 ,v 2 >
↓
π1
→ P <v 1 ,v 2 >
where ∂D denotes the boundary of the domain D.
∂ ,
106
Hiromi Ei and Shunji Ito
From the two diagrams, we deduce that
∂(Lnσ Dn(i) )
= ∂(Lnσ π2 (τ ∗ n (ei , i∗ )))
= Lnσ (∂ π2 (τ ∗ n (ei , i∗ )))
= Lnσ π1 (τ n (∂F ∗ (ei , i∗ ))) .
(i)
(i)
Let Bn denote the set of vertices on ∂(Lnσ Dn ).
(i)
(i)
Lemma 4.1 The sequences of sets {∂(Lnσ Dn )} and {Bn } converge towards the same set as n goes to
∞ in the sense of the Hausdorff metric.
Proof:
(i)
Existence of the limit set of {∂(Lnσ Dn )}∞
n=1 . It is enough to show that the following limit set exists:
Ij = lim Lnσ π1 (τ n (0, j)) for any j = 1, 2, 3, 4, 5 .
n→∞
Put
c0 :=
max
i=1,2,3,4,5
dH ( Lσ π1 (τ (0, i)), π1 (0, i) ),
where dH is the Hausdorff metric. In general the following property holds:
dH (A ∪ B, C ∪ D) ≤ max(dH (A, C), dH (B, D)) ,
for sets A, B, C, D. It is easy to check that τ n (x, i) does not have cancellation for any (x, i) and any
positive integer n. Therefore we see
dH ( Lσ π1 (τ n+1 (0, i)), π1 (τ n (0, i)) ) ≤ c0 .
Hence,
dH ( Ln+1
π1 (τ n+1 (0, i)), Lnσ π1 (τ n (0, i)) ) ≤ c0 β0 n ,
σ
(4.1)
√1
β
K≤2
.
max{|β |, |β |} K ≥ 3
This means the sequence {Lnσ π1 (τ n (0, i))}∞
n=1 is a Cauchy sequence and it has a limit set in the sense of
the Hausdorff metric.
(i)
Analogously we see that the sequence Bn converges.
(i)
By the construction of Bn and a simple approximation argument, we see these limit sets are equal.
2
where β0 =
(2)
(3)
(i)
(i)
Let B (i) (resp., B) denote the limit set limn→∞ ∂(Lnσ Dn )(= limn→∞ Bn ) (resp., limn→∞ ∂(Lnσ Dn )).
ci ∩ Ur (x)) > 0 (i = 1, 2, 3, 4, 5) for any x ∈ X
ci and any r > 0.
Lemma 4.2 µ(X
Proof: From Theorem 4.1 (3),
ci =
X
5
[
[
j=1 P (n,j) :W (n,j) =i
k
k
(n,j)
cj − πf (P
(Lnσ X
k
)) .
Tilings from some non-irreducible, Pisot substitutions
107
ci (See Corollary 2.1.), for any x ∈ X
ci and any r > 0, there exist positive integers
By the boundedness of X
n, j, k such that
cj − πf (P (n,j) ) ⊂ Ur (x) .
x ∈ Lnσ X
k
Thus we have
ci ∩ Ur (x)) ≥ µ(X
ci ∩ (Lnσ X
cj − πf (P (n,j) ))) = µ(Lnσ X
cj ) > 0 .
µ(X
k
2
ci = B (i) for i = 1, 2, 3, 4, 5.
Lemma 4.3 We have ∂ X
ci is constructed by the map τ . Proof: We show that ∂ X
c1 = B (1)
Lemma 4.3 says that the boundary of X
c1 , it is sufficient to see Bn(1) ⊂ ∂ X
c1 for any
and the other cases are shown analogously. To see B (1) ⊂ ∂ X
∗
n. Let N be the collection of tiles which consists of (e1 , 1 ) and its neighbour tiles:
N := (e1 , 1∗ ) + (e3 , 3∗ ) + (e4 , 4∗ ) + (e5 , 5∗ ) .
By N ⊂ τ ∗ 4 (e1 , 1∗ ) and Theorem 4.1 (3),
c1 ∩ X
ci ) = 0 for (ei , i∗ ) ⊂ N , i 6= 1 .
µ(X
(1)
c1 and x ∈ X
cj . Suppose that x is
Take x ∈ Bn , then there exists (ej , j ∗ ) ⊂ N , j 6= 1 such that x ∈ X
c
c
c
an inner point of X1 , that is, there is r > 0 such that Ur (x) ⊂ X1 . By x ∈ Xj and Lemma 4.2, we have
cj ∩ Ur (x)) > 0,
µ(X
therefore, for (ei , i∗ ) ∈ N
c1 ∩ X
cj ) ≥ µ(Ur (x) ∩ X
cj ) > 0 ,
µ(X
(1)
c1 for any n.
which leads to a contradiction and it implies Bn ⊂ ∂ X
n (1)
c
c
Conversely, suppose that x ∈ ∂ X1 ⊂ X1 . Then there are sequences {xn }∞
n=1 with xn ∈ Lσ Dn and
1
1
c
{y n }∞
n=1 with y n 6∈ X1 such that d(x, xn ) < n and d(x, y n ) < n for any positive integer n, where d is
c1 , we have sequences {y n,m }∞ :
the usual Euclidean distance on the plane P <v 1 ,v 2 > . By y n 6∈ X
m=1
lim y n,m = y n ,
m→∞
(1)
and for any m there exists M ≥ m such that y n,M 6∈ LM
σ DM . Therefore, we can choose y n,kn 6∈
(1)
Lkσn Dkn so that d(y n,kn , y n ) <
1
n
and k1 < k2 < · · · . Thus the sequence {y n,kn }∞
n=1 satisfies
d(y n,kn , x) ≤ d(y n,kn , y n ) + d(y n , x) =
2
,
n
(1)
(1)
and this means limn→∞ y n,kn = x. On the segment between xkn ∈ Lkσn Dkn and y n,kn 6∈ Lkσn Dkn ,
(1)
there exists ckn ∈ ∂Lkσn Dkn , and limn→∞ ckn = x. This implies
(1)
x ∈ lim ∂Lkσn Dkn = lim ∂Lnσ Dn(1)
n→∞
c1 ⊂ B (1) .
and ∂ X
n→∞
2
108
Hiromi Ei and Shunji Ito
c1 .
Proposition 4.1 The origin is an inner point of X
Proof: By Lemma 4.3, we see
n
n
∗N
c
L−N
(ei , i∗ ))) ) ,
σ ∂(Xi ) = lim Lσ π1 ( τ (∂F ∗ (τ
n→∞
c
for any positive integer N . This means that L−N
σ ∂(Xi ) is constructed by replacing each edge π1 (x, j) (j =
(i)
1, 2, 3, 4, 5) on ∂DN with Ij + x, where Ij = limn→∞ Lnσ π1 (τ n (0, j)).
By the inequality (4.1), we have the following inequality
dH (Lnσ π1 (τ n (0, i)), π1 (0, i)) ≤
n−1
X
c0 β0 j < c
for any n,
j=0
where c is some positive number. Therefore,
dH (Ii , π1 (0, i)) = dH
lim Lnσ π1 (τ n (0, i)), π1 (0, i) ≤ c .
n→∞
(4.2)
By the fact that π2 (τ ∗ n (U)) is covering the plane P <v 1 ,v 2 > as n goes to ∞ (See Proposition 3.3 and
Section 6.), there exists a positive integer N such that
inf d(0, x) | x ∈ ∂π2 (τ ∗ N (e1 , 1∗ )) > 2c .
c
From the construction of L−N
σ ∂(X1 ) and (4.2), we have
n
o
c
inf d(0, x) | x ∈ L−N
σ ∂(X1 ) > c .
Thus we see that for some positive number c0
n
o
c1 ) > c0 > 0 .
inf d(0, x) | x ∈ ∂(X
c1 .
This implies the origin is an inner point of X
2
Proposition 4.2 The Hausdorff dimension of the limit set B of the boundaries limn→∞ ∂(Lnσ Dn ) satisfies
b =) dimH B ≤ 2 log λθ ,
(dimH ∂ X
log β
0 0 0 0
1
1 0 0 0 K + 1
0
where Mθ =
0 1 0 0
and λθ is the maximum eigenvalue of the matrix Mθ , that is, the
0 0 1 0
0
0 0 0 1
K
maximum solution of the equation x5 − Kx4 − (K + 1)x − 1 = 0.
Tilings from some non-irreducible, Pisot substitutions
109
Proof: We define the endomorphism θ on the free group < 1±1 , 2±1 , 3±1 , 4±1 , 5±1 > associated with τ :
1 → 5
K+1 times
}|
{
z
2 → 1 5−1 5−1 · · · 5−1
3 → 2
.
θ :
4
→
3
K times
z }| {
5 → 4 5−1 · · · 5−1
We see that θn (15−1 34−1 23−1 ) has no cancellation for all n. Therefore, from the method of [BED86],
[DEK82], [IO93], [IK91], we have this result.
2
Corollary 4.1 For any K ≥ 0 the Hausdorff dimension of B satisfies the inequality:
b =) dimH B < 2.
(dimH ∂ X
b = 1.10026 · · · .
In the case of K = 0, dimH ∂ X
Proof: By Proposition 4.2, it is enough to show the inequality λθ < β. We can assume K ≥ 1. Put
f (x) = x3 − Kx2 − (K + 1)x − 1
g(x) = x5 − Kx4 − (K + 1)x − 1.
By a simple computation, one gets that
f (K + 1) < 0 , f (K + 1 +
1
) > 0,
3K + 2
K +2
) < 0 , g(K + 1) > 0 .
2
1
and there is some solution λ0 of the equation g(x) = 0 such
This means K + 1 < β < K + 1 + 3K+2
K+2
0
0
that 2 < λ < K + 1. From g (K + 1) > 0 and g 00 (x) > 0 with x ≥ K + 1, we know there is no
< λθ < K + 1. Using the
solution of the equation g(x) = 0 with x ≥ K + 1, that is, λ0 = λθ and K+2
2
above two inequalities we have the conclusion.
2
g(
4.3
A second tiling given by τ ∗ with atomic surfaces
In Section 3 we introduce a first tiling Tτ ∗ with five polygonal prototiles π2 (x, i∗ ) (i=1,2,3,4,5). Here
ci with fractal boundary by replacing each prototile
we consider a second tiling with five prototiles X
∗
ci + πx. Put
π2 (x + ei , i ) in Tτ ∗ with X
b
ci + πx | π2 (x + ei , i∗ ) ∈ Tτ ∗ } .
TτX∗ := {X
ci + πx | π2 (x + ei , i∗ ) ∈ Tτ ∗ } is a quasi periodic tiling with five
Theorem 4.2 The family of tiles {X
c
prototiles Xi (i = 1, 2, 3, 4, 5) of the plane P <v 1 ,v 2 > .
110
Hiromi Ei and Shunji Ito
Proof: At first we show that TτX∗ is a tiling of P <v 1 ,v 2 > . From Proposition 4.1, there exists a positive
number δ such that
c1 .
Uδ (0) ⊂ X
b
Notice that for any positive integer n
Uβ0 −n δ (0) ⊂ L−n
σ Uδ (0).
By Theorem 4.1 (3)
c
Uβ0 −n δ (0) ⊂ L−n
σ X1 =
5
[
(n,j)
[
cj − L−n
(X
σ πf (Pk
)) ,
j=1 P (n,j) :W (n,j) =1
k
k
(n,j)
cj − L−n
where the tiles (X
)) do not overlap for any k, j. From
σ πf (Pk
∗n
∗n
Tτ ∗ = ∪∞
(U)) = ∪∞
(e1 , 1∗ )),
n=0 π2 (τ
n=0 π2 (τ
the union of tiles
S5
j=1
S
(n,j)
(n,j)
Pk
(n,j)
:Wk
=1
cj − L−n
(X
σ πf (Pk
)) is a part of TτX∗ . This means that the
b
pieces of TτX∗ do not overlap and cover Uβ0 −n δ (0) for any n. Therefore TτX∗ is a tiling of P <v 1 ,v 2 > by
b
b
taking n → ∞. On the other hand, from the quasi periodicity of the tiling Tτ ∗ , TτX∗ is also quasi periodic.
2
b
At the beginning of this paper, we started from the substitution σ given by (1.1). And we obtained
ci }i=1,2,3,4,5 ) and the tiling TτXb∗ . We also get tiles {Ti }i=1,2,3,4,5
atomic surfaces {Xi }i=1,2,3,4,5 (= {−X
and a tiling Tβ by using the numeration system related to a Pisot number β as in [AKI99], [THU89]. We
b
plan to make the relation between {Xi }i=1,2,3,4,5 (resp. TτX∗ ) and {Ti }i=1,2,3,4,5 (resp. Tβ ) explicit with
the subdivision rule in [EIR02].
5
Dynamical systems
b a Markov transformation and a domain
We introduce two types of measured dynamical systems on X
exchange transformation with σ-structure.
ci implies that there exist integers j, k such that
From Theorem 4.1 (3), x ∈ X
(j)
−1
c
L−1
σ x ∈ Xj − Lσ πf (Pk ).
ci :
Therefore we get the division of X
[
ci =
X
ci
X
j
k
,
j
(j)
k :Wk =i
j
(j)
k
−1
c
ci | L−1
c
where Xi
:= {x ∈ X
σ x ∈ Xj − Lσ πf (Pk )}. Here we have the following theorem which
provides a Markov transformation.
Tilings from some non-irreducible, Pisot substitutions
111
b →X
b by
Theorem 5.1 Let us define the map F : X
F (x) =
L−1
σ x
+
(j)
L−1
σ πf (Pk )
ci
if x ∈ X
j
k
,
then the map F is well-defined and
ci
F (X
j
k
cj .
)=X
The transformation F is well-defined because of Theorem 4.1 (4), and it is called a Markov transformation
ci }i=1,2,3,4,5 .
with matrix structure Lσ with respect to partitions {X
From now on we consider a domain exchange transformation with σ-structure.
Definition 5.1 Let (X, T, µ) be a measured dynamical system, σ a substitution over the alphabet A such
that
(i)
(i)
(i)
σ(i) = W0 W1 · · · Wl(i) −1 ,
and consider a measurable partition {X (i) | i ∈ A} of X, a subset A of X and a measurable partition
{A(i) | i ∈ A} of A.
We say that the transformation T has σ-structure with respect to the pair of partitions {X (i) }, {A(i) }
if T satisfies the following condition:
(i)
T k A(i) ⊂ X (Wk )
T l(i) AS(i) ⊂ S
A
X = i∈A 0≤k≤l(i) −1 T k A(i)
f or all i ∈ A , k = 0, 1, · · · , l(i) − 1
.
f or all i ∈ A
(non − overlapping)
For the transformation T with σ-structure, the induced transformation T |A on A is defined by
T |A (x) = T l(i) (x) f or x ∈ A(i) .
Proposition 5.1 Let σ be a substitution satisfying (1.1) and put
(n)
(n)
(n)
(n)
(n)
L−n
.
σ = f1 , f2 , f3 , f4 , f5
(1) The transformation En : Dn → Dn given by
(n)
En (x) = x − πf i
if x ∈ Dn(i) (i = 1, 2, 3, 4, 5)
is well-defined and preserves the Lebesgue measure µ. (See Fig. 14.)
(i)
(2) The transformation E1 : D1 → D1 has σ-structure with respect to the pair of partitions {D1 },
(i)
{D0 } and the induced transformation satisfies
E1 |D0 = E0 .
Moreover, for any positive integer k the transformation Ek : Dk → Dk has σ-structure with respect
(i)
(i)
to the pair of partitions {Dk }, {Dk−1 } and the induced transformation satisfies
Ek |Dk−1 = Ek−1 .
112
Hiromi Ei and Shunji Ito
(3) For any positive integer k the transformation Ek : Dk → Dk has σ k -structure with respect to the
(i)
(i)
pair of partitions {Dk }, {D0 } and the induced transformation satisfies
Ek |D0 = E0 .
E0 :
τ*
τ*
τ*
τ*
E1 :
E2 :
Fig. 14: Domain exchange transformations Ei on Di
The transformations Ek are called domain exchange transformations on Dk .
Proof: From the equation
τ ∗ n (ei , i∗ ) = Mf (n) (τ ∗ n (0, i∗ ))
i
0
and Dn = Dn by Proposition 3.1, we see the transformation En is well-defined.
Tilings from some non-irreducible, Pisot substitutions
113
First statement of (2) is obtained from Fig. 14. The second and third statements are proved inductively.
2
This proposition leads to the following:
b →X
b by
Theorem 5.2 Define the transformation E : X
E(x) = x − πei
ci .
x∈X
b And E has σThe transformation E, which preserves the Lebesgue measure µ, is well-defined on X.
n
c
c
structure with respect to the pair of partitions {Xi }, {Lσ Xi }, moreover, E has σ -structure with respect
ci }, {Lnσ X
ci } for all n ∈ N.
to the pair of partitions {X
Proof: From Theorem 4.1 (1), the transformation E is well-defined. From the equation given by Theorem 4.1 (3) and (4), we have
ci =
X
5
[
cj − πf (P (j) )) ,
(Lσ X
k
[
j=1 P (j) :W (j) =i
k
k
ci ⊂ X
b (i) .
Lσ X
W
0
Hence,
ci ) = Lσ X
ci − πf (W (i) ) ⊂ X
b (i) .
E(Lσ X
0
W
1
Analogously we say
(i)
ci ) = Lσ X
ci − πf (P ) ⊂ X
b (i)
E k (Lσ X
k
W
k
for k = 0, 1, · · · , l(i)−1 and
ci )
E l(i) (Lσ X
ci − πf (σ(i))
= Lσ X
ci − πei )
= Lσ (X
0
ci .
= Lσ X
ci }, {Lσ X
ci }. By induction, we can
This means E has σ-structure with respect to the pair of partitions {X
show the second statement.
2
b →X
b is also called the domain exchange transformation associated with a
This transformation E : X
substitution σ. From this theorem and Proposition 4.1 we have the following corollaries:
Corollary 5.1 For k = 0, 1, · · · , we have
bs ,
E k (0) ∈ X
k
where ω = limn→∞ σ n (1) = s0 s1 · · · sn · · · .
From Corollary 5.1 we have the following corollary: (See Lemma 6 in [AI01] and [BFMS02].)
114
Hiromi Ei and Shunji Ito
Corollary 5.2 Let (Ωσ , S) be the substitution dynamical system generated by a substitution σ given by
b E) is a realization of (Ωσ , S), and the realization map φ from Ωσ to X
b
(1.1). The dynamical system (X,
is given by using φ(S k (s0 s1 · · · )) = E k (0) for all positive integers k.
Finally to observe ergodic property of the domain exchange transformation E, we define new domains
eb
fn (resp., X)
fn (resp., E)
e on the domains which are measureD
and domain exchange transformations E
theoretically isomorphic to a rotation on the 2-dimensional torus.
Since the domain π2 (U) is not a 2-dimensional fundamental domain, we introduce the symmetrical
image of U denoted by U and the union of U and U denoted by Ue (cf. Fig. 15 and Fig. 16), which will be
a 2-dimensional fundamental domain as follows:
U
Ue
:= {(e4 , 1∗ ) + (e4 , 3∗ ) + (e4 , 5∗ ) + (2e4 , 1∗ ) + (e2 + e4 , 5∗ )},
:= U + U,
L := {m(e2 − e4 ) + n(e1 + e2 − 2e3 ) | m, n ∈ Z},
f0 := π2 (U)
e = D0 ∪ {−D0 + (πe1 + πe2 + πe4 )},
D
π(L) := {πz | z ∈ L}.
Then we have the following lemma:
e are 2-dimensional fundamental domains for the lattice π(L),
Lemma 5.1 The domains Lnσ π2 (τ ∗ n (U))
n
∗n e
2
that is, Lσ π2 (τ (U)) = R /L for any non negative integer n. In other words, we have periodic tilings
e for some z ∈ L, (y, j ∗ ) ⊂ τ ∗ n (x, i∗ )} for any non negative integer
{Lnσ π2 (y, j ∗ ) | (x, i∗ ) ⊂ Mz (U)
n.
Proof: Replace the segment {tπ(e2 − e4 ) | 0 ≤ t ≤ 1}, which is an edge of the fundamental domain
{sπ(e2 − e4 ) + tπ(e1 + e2 − 2e3 ) | 0 ≤ s ≤ 1, 0 ≤ t ≤ 1} for the lattice π(L), with π1 ((−e4 , 4) +
(−e4 , 2)); and the segment {tπ(e1 + e2 − 2e3 ) | 0 ≤ t ≤ 1} with π1 ((−e3 , 3) + (−e3 , 1) + (e1 −
2e3 , 3) + (e1 − 2e3 , 2)). We replace the other sides of these edges analogously. Then we have the domain
e Thus π2 (U)
e is a 2-dimensional fundamental domain. By replacing every edge π1 (x, i) on
π2 (M−e1 (U)).
e with Lnσ π1 (τ n (x, i)), we can also say that Ln π2 (τ ∗ n (U))
e is a 2-dimensional fundamental domain.
π2 (U)
σ
(See Fig. 15.)
2
f0 : D
f0 → D
f0 by
Let us define the map E
f0 (x) = x − πe2 (mod π(L) ) .
E
f0 as follows:
For example, the domain π2 (e1 , 1∗ ) is mapped by E
f
E
f
E
f
E
π2 (e1 , 1∗ ) →0 π2 (2e4 , 1∗ ) →0 π2 (e4 , 1∗ ) →0 π2 (0, 1∗ ).
f0 is well-defined and measure-theoretically isomorphic to a rotation on the 2-dimensional
Therefore, E
torus, moreover, we have
f0 |D = E0 .
E
0
Tilings from some non-irreducible, Pisot substitutions
115
π (e 1 +e2 -2e3 )
0
π (e 2 -e4 )
Fig. 15: The periodic tiling {π2 (x, i∗ ) | (x, i∗ ) ⊂ Mz (Ue) for some z ∈ L}
In Lemma 5.1 we obtained 2-dimensional fundamental domains and they were constructed by replacing
e with Lnσ π1 (τ n (x, i)). Moreover, in the same way as in the proof of Proposievery edge π1 (x, i) on π2 (U)
tion 4.1, we also obtain a new 2-dimensional fundamental domain by replacing every edge π1 (x, i) on the
boundary of the domains D0 and {−D0 + (πe1 + πe2 + πe5 )} with Ii + πx. Then we have the following
theorem, which says the domain exchange transformation E is measure-theoretically isomorphic to the
induced transformation of a rotation on the 2-dimensional torus:
πe 2
eb
f0 and X
Fig. 16: The domains D
Theorem 5.3 The domain given by
eb
b ∪ {−X
b + (πe1 + πe2 + πe5 )}
X
:= X
is a 2-dimensional fundamental domain.
eb
eb
e:X
Let us define the map E
→X
by
e
E(x)
= x − πe2 (mod π(L) ) ,
116
Hiromi Ei and Shunji Ito
then it is well-defined and measure-theoretically isomorphic to a rotation on the 2-dimensional torus,
moreover, we have
e b =E .
E|
X
6
Appendix: The proof of Proposition 3.3
In this section we prove the following proposition stated in Section 3:
∗n
Proposition 3.3 ∪∞
(U)) = P <v 1 ,v 2 > , that is, π2 (τ ∗ n (U)) covers the plane as n goes to ∞.
n=1 π2 (τ
First we introduce the notion of C-covered property of a set ∆ ∈ F ∗ associated with the connectivity
of the domain π2 (∆) as in [IO93]. Define the subset C0 of F ∗ and C consisting of translated elements of
C0 by
C0
:= {(e1 , 1∗ ) + (e4 , 4∗ ), (e1 , 1∗ ) + (e3 , 3∗ ), (e2 , 2∗ ) + (e5 , 5∗ ), (e1 , 1∗ ) + (e5 , 5∗ ), (0, 1∗ ) + (e2 , 4∗ ),
(0, 1∗ ) + (0, 3∗ ), (0, 2∗ ) + (0, 5∗ ), (0, 1∗ ) + (0, 4∗ ), (0, 3∗ ) + (0, 5∗ ), (0, 2∗ ) + (0, 4∗ )} ,
C := {Mz ξ ∈ F ∗ | ξ ∈ C0 , z ∈ Z5 }.
Fig. 17: The elements of C0
Definition 6.1 An element ∆ ∈ F ∗ is C-covered if there exists a finite subset Γ = {γi ∈ C | i =
1, 2, · · · , N } of C such that
(1) for any (x, i∗ ), (y, j ∗ ) ⊂ ∆, there exists a subset {γst }kt=1 of Γ such that
(x, i∗ ) ⊂ γs1 , γst ∩ γst+1 6= ∅ (t = 1, 2, · · · , k − 1), (y, j ∗ ) ⊂ γsk ,
where for γ, γ 0 ∈ F ∗ , γ ∩ γ 0 = ∅ means µ(π2 (γ) ∩ π2 (γ 0 )) = 0,
Tilings from some non-irreducible, Pisot substitutions
117
(2) π2 (Γ) = π2 (∆), where π2 (Γ) = ∪N
i=1 π2 (γi ).
The subset Γ is called a C-cover of ∆.
Lemma 6.1 If ∆ ∈ F ∗ is C-covered, then τ ∗ (∆) is C-covered.
Proof: It is enough and easy to check that the image of every element of C0 by τ ∗ is also C-covered. (See
Fig. 18.)
2
τ∗
( e 1 , 1* ) + ( e 4 , 4 * )
(0, 2* ) + (0, 5 * )
Fig. 18: The images of (e1 , 1∗ ) + (e4 , 4∗ ) and (0, 2∗ ) + (0, 5∗ ) by τ ∗
Definition 6.2 C-covered ∆ ∈ F ∗ is called a C-covered cell if π2 (∆) is a topological cell.
Lemma 6.2 For any n, τ ∗ n (U) is a C-covered cell.
Proof: U is a C-covered cell. Suppose that τ ∗ n (U) is a C-covered cell but τ ∗ n+1 (U) is not, that is,
P <v 1 ,v 2 > −π2 (τ ∗ n+1 (U)) has a bounded component D 1 and an unbounded component D 2 . Recall that
P
e give periodic tilings. Then, there exist (x, i∗ ) and (y, j ∗ ) ⊂
from Lemma 5.1 z ∈L ML−n
(τ ∗ n (U))
σ z
P
∗ n+1 e
(U)) such that
z ∈L ML−(n+1) z (τ
σ
π2 (x, i∗ ) ⊂ D 1 and π2 (y, j ∗ ) ⊂ D 2 .
P
∗
∗
e such that
(τ ∗ n (U))
And for (x, i∗ ), (y, j ∗ ) there exist (x0 , i0 ), (y 0 , j 0 ) ⊂ z ∈L ML−n
σ z
∗
∗
(x, i∗ ) ⊂ τ ∗ (x0 , i0 ) and (y, j ∗ ) ⊂ τ ∗ (y 0 , j 0 ).
From Fig. 15 we have the following properties:
(1) U, Ue are C-covered,
e ∩ π2 (Mz 0 (U))
e 6= ∅, then Mz (U)
e + Mz 0 (U)
e is C-covered,
(2) if z, z 0 ∈ L (z 6= z 0 ) satisfy π2 (Mz (U))
118
Hiromi Ei and Shunji Ito
e 6= ∅, then U + Mz (U)
e is C-covered.
(3) if z ∈ L (z 6= 0) satisfies π2 (U) ∩ π2 (Mz (U))
Hence, there exists a finite subset Γ = {γt ∈ C | t = 1, 2, · · · , N } of C such that
∗
∗
(x0 , i0 ) ⊂ γ1 , γt ∩ γt+1 6= ∅ (t = 1, 2, · · · , N − 1), (y 0 , j 0 ) ⊂ γN ,
γt ∩ τ ∗ n (U) = ∅ (t = 1, · · · , N ).
The second condition implies
N
X
τ ∗ (γt ) ∩ τ ∗ n+1 (U) = ∅ .
t=1
∗
∗
On the other hand, τ (Γ) := {τ (γt ) | t = 1, 2, · · · , N } has the following property:
(x, i∗ ) ⊂ τ ∗ (γ1 ),
τ ∗ (γt ) ∩ τ ∗ (γt+1 ) 6= ∅ (t = 1, · · · , N − 1),
(y, j ∗ ) ⊂ τ ∗ (γN ),
and τ ∗ (γt ) is C-covered by Lemma 6.1 for any t, that is, π2 (x, i∗ ) and π2 (y, j ∗ ) are connected by using
PN
elements of C. This provides t=1 τ ∗ (γt ) ∩ τ ∗ n+1 (U) 6= ∅, which leads to a contradiction.
2
Finally we want to show that π2 (τ ∗ n (U)) is expanding on P <v 1 ,v 2 > as n goes to ∞.
Definition 6.3 An element ∆ ∈ F ∗ including τ ∗ n (U) has an n-th C-belt if there exists a finite subset
Γ = {γt ∈ C | t = 1, 2, · · · N } of C such that
(1) π2 (∆) ⊃ π2 (Γ),
(2) γt ∩ τ ∗ n (U) = ∅ for any t (t = 1, 2, · · · , N ),
(3) there exists (x, i∗ ) ⊂ ∆ satisfying
(x, i∗ ) ⊂ γ1 , γt ∩ γt+1 6= ∅ (t = 1, 2, · · · , N − 1), (x, i∗ ) ⊂ γN ,
(4) π2 (Γ) is an annulus and π2 (Γ)bd ⊃ π2 (τ ∗ n (U)), where Abd means the bounded domain of the
complement of an annulus A.
Γ is called an n-th C-belt of ∆ .
Lemma 6.3 If ∆ ∈ F ∗ including τ ∗ n (U) has an n-th C-belt Γ, then τ ∗ (∆) has an (n + 1)-th C-belt.
Proof: Assume that Γ = {γt ∈ C | t = 1, 2, · · · , N } is an n-th C-belt of ∆. Since the subset Γ0 =
{γ 0 ∈ C | γ 0 ⊂ τ ∗ (γt ), t = 1, · · · , N } of C related to τ ∗ (∆) satisfies (1), (2), (3) of Definition 6.3, it is
enough to show that π2 (Γ0 ) is an annulus and π2 (Γ0 )bd ⊃ π2 (τ ∗ n+1 (U)). Let us consider two domains
−1
∗n
L−1
(U)), and replace every edge on these domains by using the replacing and reσ π2 (Γ) and Lσ π2 (τ
dividing method. Then we have π2 (Γ0 ) and π2 (τ ∗ n+1 (U)). By the property (3) of Definition 6.3, π2 (Γ0 )
bd
∗n
is an annulus. From the relation L−1
⊃ L−1
(U)) by the assumption, we see the relation
σ π2 (Γ)
σ π2 (τ
of inclusion.
2
Tilings from some non-irreducible, Pisot substitutions
119
Proof of Proposition 3.3. In the case of K = 0, we can take a first C-belt Γ1 of τ ∗ 8 (U) concretely. (See
Fig 19.) In the case of K ≥ 1, take a first C-belt Γ1 as follows:
Γ1
= {γ ∈ C | γ ⊃ (x, i∗ ),
(x, i∗ ) ∈ {(e1 − e5 , 1∗ ), (e4 − e5 , 4∗ ), (e1 − e4 , 1∗ ), (e5 , 4∗ ), (e5 − e3 , 5∗ ), (e1 − e3 , 1∗ ),
(e4 − e3 , 4∗ ), (e1 − e3 − e5 , 1∗ ), (e1 − e2 , 1∗ ), (e5 − e2 , 4∗ ), (e3 − e2 , 3∗ ), (e1 − e2 − e4 , 1∗ ),
(e4 − e2 , 4∗ ), (e4 + e5 − e1 , 4∗ ), (e5 , 1∗ ), (e5 − e3 , 1∗ ), (e4 + e5 − e1 , 3∗ )} }.
Fig. 19: The figure of π2 (τ ∗ 8 (U )) (K = 0) and π2 (τ ∗ 5 (U )) (K ≥ 1)
From Lemma 6.3, τ ∗ 8n (U) has an 8(n − 1)-th C-belt Γ8(n−1) for any n such that
π2 (τ ∗ 8n (U) − τ ∗ 8(n−1) (U)) ⊃ π2 (Γ8(n−1) ).
Thus the distance of the boundary of π2 (τ ∗ n (U)) from the origin tends to ∞; and from Lemma 6.2,
π2 (τ ∗ n (U)) is a topological cell for any n. Therefore, π2 (τ ∗ n (U)) is covering the plane P <v 1 ,v 2 > as n
goes to ∞.
2
Acknowledgements
The authors would like to express our deep gratitude to Prof. Hui RAO for reading through our preprint
and giving advice. Big thanks go to the referees who gave us a lot of useful comments.
120
Hiromi Ei and Shunji Ito
References
[AI01]
P. ARNOUX and S. ITO. Pisot substitutions and Rauzy fractals. Bull. Belg. Math. Soc.,
8:181–207, (2001).
[AKI99]
S. AKIYAMA. Self affine tiling and Pisot numeration system. In K. Györy and S. Kanemitsu,
editors, Number Theory and its Applications, pages 7–17. Kluwer, 1999.
[AKI00]
S. AKIYAMA. Cubic Pisot units with finite beta expansions. In F. Halter-Koch and R.F. Tichy,
editors, Algebraic Number Theory and Diophantine Analysis, pages 11–26. de Gruyter, 2000.
[AKI02]
S. AKIYAMA. On the boundary of self affine tilings generated by Pisot numbers. J. Math.
Soc. Japan, 54:283–308, (2002).
[AS98]
S. AKIYAMA and T. SADAHIRO. A self-similar tiling generated by the minimal Pisot number . Acta Math. Info. Univ. Ostraviensis, 6:9–26, (1998).
[BAS02]
F. BASSINO. Beta-expansions for cubic Pisot numbers. In LNCS, volume 2286, pages 141–
152. Springer, 2002.
[BED86]
T. BEDFORD. Dimension and dynamics for fractal recurrent sets. J. London Math. Soc.,
(2)33:89–100, (1986).
[BFMS02] V. BERTHÉ, S. FERENCZI, C. MAUDUIT, and A. SIEGEL. Substitutions in dynamics,
arithmetics and combinatorics, volume Lectures Notes in Mathematics 1794. Springer, 2002.
[CS01]
V. CANTERINI and A. SIEGEL. Automate des préfixes-suffixes asocié à une substitution
primitive. J. Théor. Nombres Bordeaux, 13:353–369, (2001).
[DEK82]
F. M. DEKKING. Replicating superfigures and endomorphisms of free groups. J. Combin.
Theory Ser. A., 32:315–320, (1982).
[EIR02]
H. EI, S. ITO, and H. RAO. Atomic surfaces and self similar tiling II: Non-irreducible case.
Preprint, 2002.
[FFIW00] D. J. FENG, M. FURUKADO, S. ITO, and J. WU. Pisot substitutions and the Hausdorff
dimension of boundaries of Atomic surface . Preprint, 2000.
[FIN00]
T. FUJITA, S. ITO, and S. NINOMIYA. Symbolical and geometrical characterizations of Kronecker sequences by using Brun’s algorithm. J. Math. Sci. Univ. Tokyo, 7:163–193, (2000).
[IK91]
S. ITO and M. KIMURA. On Rauzy fractal. Japan J. of Indust. Appl. Math., 8:461–486,
(1991).
[IO93]
S. ITO and M. OHTSUKI. Modified Jacobi-Perron algorithm and generating Markov partitions for special hyperbolic toral automorphisms . Tokyo J. Math., 16:441–472, (1993).
[IR]
S. ITO and H. RAO. Purely periodic β-expansions with Pisot unit base. to appear in AMS.
Tilings from some non-irreducible, Pisot substitutions
121
[IR02]
S. ITO and H. RAO. Atomic surfaces, tilings and coincidence I: Irreducible case. Preprint,
2002.
[IS01]
S. ITO and Y. SANO. On periodic β-expansions of Pisot numbers and Rauzy fractals. Osaka
J. Math., 38:349–368, (2001).
[IT74]
S. ITO and Y. TAKAHASI. Markov subshifts and realization of β-expansions. J. Math. Soc.
Japan, 26:33–55, (1974).
[MW88]
R. D. MAULDIN and S. C. WILLIAMS. Hausdorff dimension in graph directed constructions. Trans. of AMS, 309:811–829, (1988).
[PAR60]
W. PARRY. On the β-expansions of real numbers. Acta Math. Acad. Sci. Hungar., 11:401–
416, (1960).
[SAI01]
Y. SANO, P. ARNOUX, and S. ITO. Higher dimensional extensions of substitutions and their
dual maps . J. d’Analyse Mathématique, 83:183–206, (2001).
[THU89]
W. P. THURSTON. Groups, tilings and finite state automata. In AMS Colloquium lecture
notes, pages 183–206, (1989).
122
Hiromi Ei and Shunji Ito