Applications of 3-Manifold Floer Homology
by
Ilya Elson
Bachelor of Arts
University of Pennsylvania, May 2001
Master of Arts
University of Pennsylvania, May 2001
Submitted to the Department of Mathematics
in partial fulfillment of the requirements for the degree of
Master of Science
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
February 2008
@ Ilya Elson, MMVIII. All rights reserved.
The author hereby grants to MIT permission to reproduce and
distribute publicly paper and electronic copies of this thesis document
in whole or in part.
Author ..............
'''''''•''
'
.
i ''''':~,_
"1- ..
Department
. J ....
£
of
Ar_..L.I~~ ....
.L:_"_
Mathematics
February
8,
2008
Certified by........................................ . ..............
Tomasz S. Mrowka
Professor of Mathematics
tTh\
Thesis Supervisor
Accepted by................
MASSACHUSTTS INSTITUTE
OF TEOHNOLOGY
David S. Jerison
Chairman, Departmental Committee on Graduate Students
MAR 1,0 2008
LIBRARIES
.V .
ARCHfVES
Applications of 3-Manifold Floer Homology
by
Ilya Elson
Submitted to the Department of Mathematics
on February 8, 2008, in partial fulfillment of the
requirements for the degree of
Master of Science
Abstract
In this thesis we give an exposition of some of the topological preliminaries necessary to understand 3-manifold Floer Homology constructed by Peter Kronheimer and
Tomasz Mrowka in [16], along with some properties of this theory, calculations for
specific manifolds, and applications to 3-manifold topology.
Thesis Supervisor: Tomasz S. Mrowka
Title: Professor of Mathematics
Contents
1 Topological Preliminaries
1 1
Surgery
1.1.1
Handle Decompositions .
1.1.2
Surgery in any Dimension
1.1.3
Cobordism . . . . . . ....
1.1.4
Rational Surgery on a Knot
1.2
Taut Foliations ....
1.3
Spin Structures ...........
1.4
Plane fields .
1.5
Special surgeries ...........
3-manifold
.......
............
2 Floer Homology
24
2.1
Morse Homology
2.2
Monopole Floer Homology . . . . . . . .
26
2.2.1
General Definitions and Theorems
26
2.2.2
The Surgery Exact Triangle . . .
27
2.3
L-spaces . .
2.4
Some Calculations
References . .
. . . . . . . . . . ...
.................
.
...................
.....
24
28
......
31
34
Chapter 1
Topological Preliminaries
1.1
Surgery
1.1.1
Handle Decompositions
A detailed exposition of handle decompositions can be found in [7, Chapter 4].
Handle decompositions are highly analogous to CW-decompositions. The difference is that the cells are "thickened" to have the same dimension as the manifold
we are building. An n-dimensional k-handle h is simple an n-ball thought of as
Dk x Dn- k . Dk x {0} is called the core, and {0} x Dnboundary of the core, aDk x {0} • S k {0} x aD
- k =
1
k
is called the co-core. The
x {0} is called the attaching sphere and
{0} x Sn- k - i is called the belt sphere.
Suppose we have an n-manifold X with non-empty boundary, and an S k -
1
em-
bedded in aX with trivial normal bundle. A choice of trivialization 7 of the normal
bundle gives a diffeomorphism of a tubular neighborhood N of the S k attaching region,
: N -- S k -
1
1,
called the
x Dn- k. We can then form a new manifold with
boundary, X' = X ud h. There is a technicality, which is that X' is well defined as
a topological space, but not as a smooth manifold with boundary because there is a
"corner," in other words, X' has the structure of a manifold with boundary everywhere except along the boundary of the attaching region in aX. However, there is a
canonical way to smooth corners, see [24, section 7.51.
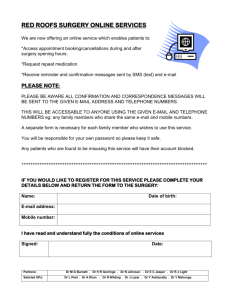
Figure 1-1: Attaching a 3-dimensional 1-handle to a 0-handle
The pair (S k - l,
T)
specified up to isotopy determines X' up to diffeomorphism.
Handle decompositions arise from Morse functions, so the existence of Morse functions implies that every smooth, compact manifold admits a handle decomposition.
See [7, Chapter 4] for a very terse overview. See [19, Part I, §1-3] for more details,
though, in this reference everything is formulated in terms of cells rather than handles,
the modifications are obvious.
More precisely, the following are elementary facts, which altogether can be called
the fundamental preliminary lemma of Morse theory. The proof of these occupies a
number of pages in [19], but the proof is nothing more than some vector calculus.
Every closed, smooth n-dimensional manifold admits a smooth function f : M -[-1, n] such that the critical points, i.e. points where df = 0, are isolated and nondegenerate, i.e. 0 is not an eigenvalue of Hess f, where Hess f is the Hessian of f,
which is well-defined at a critical point. The number of negative eigenvalues of Hess f
is called the index of a critical point. Such a function is called a Morse function.
Further, there exists a Morse function, such that the critical values are 0, 1,..., n
and f- 1 ({k}) are the critical points of index k. Such a Morse function is called selfindexing. Finally, around a critical point Pk e M of index k,there exist coordinates
(Xl,...,Xn),
p =
(0, ... , 0), such that f(xI, ... ,x)
= f(p) - EI X2 + E
k+l
:
This innocuous statement, which is absolutely elementary to prove, allows one to
conclude that f -1(-1, k + 1/2) is just f-l(-1l, k - 1/2) u k-handles.
1.1.2
Surgery in any Dimension
See [7, Sections 5.2] and [22, Theorem 3.12] for details. Suppose we have Sk embedded in some n-dimensional manifold M with trivial normal bundle v. A choice of
trivialization 7 of v is called a framing, and gives a diffeomorphism q of a tubular
neighborhood of the embedded S k in M, which we call N, with S k x Dn- k . We can
then form a new manifold M' by excising N and gluing in D k+1 x Sn-
k - 1,
since the
two have diffeomorphic boundaries,
9!a) : N - a (sk
x Dn-k)
a
(Dk+1 x Sn-k-1)
M' = M\N IJ0N Dk+1 x Sn-k-1 .
The manifold M' is said to be obtained from M by surgery on Sk with framing T. Note
that the framing plays a crucial role; a different choice of framing will generally yield
a different manifold. Note also that the class in 7Fk(M) represented by the embedded
Sk is killed in M'. Thus, surgery can be used to successively simplify a manifold.
The normal bundle v is canonically trivial over the two disks Dk and Dk which
are glued along S k - 1 to form the Sk along which the surgery is performed. Hence, the
difference between any two trivializations of v gives rise to a map
and so to an element of
7 k-1
S
k
- 1
-- GL(n - k),
(SO (n - k)).
The notion of surgery is one of the most powerful in differential topology, and
allows a sort of classification of manifolds of dimension greater than 4. The classic
references for this topic, [1, 29], are very difficult to read, but the first triumphs
of surgery theory, the Smale's h-cobordism theorem as explained in [22], and the
Kervaire-Milnor classification of homotopy spheres in high dimension, [12] are very
readable. Also, [27] is an accessible introduction to the subject; in particular, in
that Chapter 13 of [27] one can find the classical surgery exact sequence, which is
reminiscent of the surgery exact sequence for Floer Homology (2.6).
Surgery was
introduced by Milnor in [21] and independently by Wallace, who called it "spherical
modification" in [30].
1.1.3
Cobordism
Two n-dimensional manifolds M1 and M2 are said to be cobordant if there exists an
n + 1-dimensional manifold W such that
aW
= Mr
1 _ M 2. Cobordism is clearly an
equivalence relation, since W = M x [0, 1] is a cobordism of M with itself, and if
W1 is a cobordism between M 1 and M
W = W1 IHM2 2
2 and
is a cobordism from M
1
W 2 is a cobordism from M
2
to M 3,then
to M 3. Further, with the empty manifold
as the neutral element and disjoint union as the addition the set of equivalence classes
of manifolds upto cobordism becomes an abelian group Qn. We can actually further
equip the union Q = Un Qn with the structure of a ring by using ordinary cartesian
product as the multiplication. Indeed, if W1 is a cobordism from M 1 to M 3 and W2
is a cobordism from M 2 to M 4,then W 1 x M 2 IHM
xM
3
2M3 x
W2 is a cobordism from
M 1 x M 2 to M 3 x M 4 .The cobordism ring Q is known to be generated by CP', n > 2.
A refinement of the notion of cobordism is the notion of oriented cobordism.
Namely, an oriented cobordism between oriented manifolds M 1 and M2 , is an oriented manifold W, such that
aW
= M1 H[ M 2 and the orientation induced from W
on M 1 agrees with the orientation of M1, while the orientation induced on M2 is the
opposite orientation.
A crucial, though trivial, point is that two manifolds related by surgery are cobordant. Indeed, if M' is obtained from M by performing surgery on some embedded
Sk with some framing
T,
then we can form W = M x [0, 1] and attach an n + 1-
dimensional k + 1-handle h along this Sk embedded in M x {1} with the specified
framing. Then W usk h is a cobordism from M to M'.
Conversely, two manifolds are cobordant if and only if they are related by a finite
number of surgeries. This is because, as in the discussion of handle decompositions,
1.1.1, a cobordism has a handle decomposition, and each handle attachment changes
the boundary of the cobordism by surgery.
1.1.4
Rational Surgery on a Knot in a 3-manifold
A special case of surgery on an embedded sphere with trivial normal bundle is surgery
on a knot K in S3 , or more generally any orientable 3-manifold. See [7, Section 5.3],
[18, Chapter 12]. In this case, the difference between two framings is an element of
71i(SO(2)) -_Z. Thus, if we pick a framing which corresponds to 0, framings will be
in one-to-one correspondence with Z.
We can think of a framing of a knot in a 3-manifold as a vector field transverse to
the knot. Indeed, given such a vector field v, and the tangent vector to the knot T, at
each point there is a unique third vector w such that the triple (v, T, w) gives the same
orientation as the orientation of the manifold. Conversely, given a trivialization of the
normal bundle along the knot, we have a diffeomorphism of a tubular neighborhood
of K and S1 x D2 , q: N(K) -- S1 x D 2 , and we can obtain a vector field transverse
to the knot by pulling back i by 0, where i, j are the usual coordinate vectors in D2
We can then set the 0-framing to be the framing such that when the knot is pushed
off itself along the vector field corresponding to the framing, the linking number of
the result with the original knot is 0. With this convention, a link diagram, where
each link component is decorated with an integer gives rise to a 3-manifold. In fact,
any 3-manifold may be obtained in this way, [18, Theorem 12.14), though, any given
3-manifold has many surgery descriptions. Any two surgery descriptions are related
by a set of standard moves. The moves are explained in [7, Theorem 5.3.6], but the
proof of the theorem is quite difficult, and can be found in the original paper, [14].
In the case of a knot in a 3-manifold M, however, there is a more general notion of
surgery. The boundary of a tubular neighborhood N(K) of a knot K in a 3-manifold
is a two-dimensional torus T2 , and we can form a new manifold M' by excising the
tubular neighborhood N(K) and gluing D 2 x S' back in by any automorphism of
the boundary T 2 . In other words, given a diffeomorphism q : T 2 -- T 2 , M' M\N(K)
J.
D 2x
S1. The diffeomorphism type of M' obviously depends only on the
isotopy class of q, and the isotopy class of a diffeomorphism 0 of T 2 is determined
by its action on homology, , : H 2 (T 2 , Z) -- H2 (T 2 , Z), , e GL(2, Z), by the Dehn-
Lickorish Theorem [26, Theorem 12.3 ].
However, the diffeomorphism type of M' is in fact determined solely by where
5 sends a simple, closed curve y, whose homology class is (0, 1) E H 2(T 2, Z), which
we think of as the "meridian of the torus," i.e. the curve {0} x OD2 c S 1 x D 2 .
This is because we can then think of M' as formed by attaching a 3-dimensional
2-handle to M\N(K) along 5(7y), and then by attaching a 3-handle to the remaining
S2 boundary component in the unique way. Indeed, a solid torus is a 3-ball with
a 1-handle attached. In gluing in the solid torus to M\N(K), the 1-handle is now
the 2-handle, and the co-core of the 1-handle is the attaching sphere of the 2-handle.
Attaching a 2-handle to a torus changes the torus by surgery along the attaching
circle, which turns the torus into S 2 , and a 3-handle can only be attached in one
way because any diffeomorphism of S 2 extends to the 3-ball, since any orientation
preserving diffeomorphism of S2 is isotopic to the identity. This latter fact is not
actually obvious, for example, it is false for high dimensional spheres. The proof is
due to Smale, and an exposition can be found in [28, Theorem 3.10.11]
The conventional way to describe
-(7y),is to let A be the "longitude" in aN(K), i.e.
a parallel copy of K on the boundary of N(K) which has linking number 0 with K,
and let p by the "meridian," i.e. a simple, closed curve which represents the generator
of H1 (M\K) - Z, which we for definiteness take to be the "right-handed" generator,
after arbitrarily orienting K. M' is then specified if we say that the 2-handle is to be
attached along pA + qjp, p, q E Z and p, q relatively prime, so that pA + qP is a primitive
element in HI (OD2 x S 1 , Z). Since p and q are relatively prime, and changing the sign
of p and q simultaneously does not change 0(7), M' is determined by p/q e Q u {co}.
The orientation of K does not matter, since switching the orientation of K switches
the orientation of p and A, and the curve pA + qi is the same. M' comes equipped
with its own knot K' c M', K' = {0} x S1 , the "longitude" of the torus we are gluing
in. This construction is called rational surgery.
The interesting fact, (see [16, Chapter X, §42]) that we will need in section 2.2.2,
is that if we perform integral surgery on some knot K 0 c Mo and call the resulting
manifold M1 equipped with a knot K 1 which we equip with the ±+1 framing relative
to the longitude of the torus we are attaching and perform surgery again to obtain
M2 with a knot K 2 c M 2 , and framing ±1, and again perform the surgery we will
get back Mo!
To see this, note that Mo\Ko
-
MI\Kj
1
M 2 \K 2 . Hence, another way to look
at the sequence of manifolds and framed knots (Mo, Ko), (MI, Ki), (M2, K 2 ), ... , is
that all three are obtained from a single 3-manifold M
Mi\Ki with torus boundary
by attaching 2-handles along curves yo, 71,712,. . in the boundary. The point is that
each successive curve is related to the previous one in H 2 (aY, Z):
7i+13 =
(
-1
[i
and the matrix appearing in this equation has order 3,
0 -1
1 0
\1 f1
0 1
It is also important for Floer Homology calculations to note the signs of the intersection forms of the cobordisms between these manifolds in light of Proposition 2.2.2.
A particular case, is p > 0 surgery on a knot in S3 , the three manifolds are then
S3 , Sp(K) and
S+,(K).
If I is the longitude and m is the meridian on the torus
boundary of S 3\K, then yo = pm + 1,yy = -( 2 p + 1)m - 21 and Y2 = (p + 1)m + 1. To
determine the signs of the intersection forms, we note that H 2 (Wi, Z), where Wi are
the cobordisms Wo
S3 -* S(K), W : S3(K) -* S3+ 1(K), W 2
S+ 1 (K)
-
S3, is
generated by a surface Ei which we can describe as the union of a Seifert surface for
the knot K and the core of the handle that we attach to form Wi. Then E0 - Eo = p,
El - E1 < 0, and E2 -2
Proposition 2.3.1.
= -(p + 1), so b2(Wo) = 1, which we use in the proof of
1.2
Taut Foliations
Definition 1. A codimension k foliation F on a n-dimensional manifold M is a
collection of open charts Ubc M, and qi :bi -- R k x
o0
Rn-k
such that Ui Uj = M and
: V --+ V
F is called co-orientable or transversely orientable if the transition functions can
be chosen to lie in GL(k) x GL+(n - k), i.e. there is a global choice of orientation in
the directions transverse to the foliation.
In the case of a coorientable codimension-1 foliation, we can think of it as being
globally specified by a 1-form a.
Example 1.2.1. This example is known as the Reeb foliation of the solid torus.
Consider the foliation of the infinite solid cylinder {(x, y, z) x 2 + y 2 < 1} by the
family of surfaces L, =
(x,y, z)
Iz
=
X2
+ a,
a e R. We obtain a foliation
of the solid torus by quotienting by the relation (x, y, z) - (x, y, z + n), n E Z, i.e.
integral translation along the z-axis. Note that all the leaves of this foliation, except
the boundary leaf, are diffeomorphic to R2 .
Example 1.2.2. Recall that S3 = S 1 x D 2 JJ S 1 x D 2 , where q : a(S' x D 2 ) = S 1 x
S1 -- S' x S' is a diffeomorphism of the boundary torus which acts by interchanging
the S' factors. Using the Reeb foliation of the solid torus, we thus, obtain a foliation
of S3 .
Definition 2. A Reeb component of a foliation Y, is an embedded solid torus with its
Reeb foliation, so that the leaves of the Reeb foliation of the solid torus are also leaves
of F. A foliation F is called Reebless if it does not contain any Reeb components.
Theorem 1.2.3. Every 3-manifold admits a codimension 1 foliation.
See [3, Theorem 8.1.1] for a proof. Note that the construction of the foliations
in the proof of the above theorem results in foliations with many Reeb components.
Not all 3-manifolds admit Reebless foliations.
Theorem 1.2.4 (Novikov). S3 does not admit any Reebless foliations.
See [3, Chapter 9] for a proof.
Definition 3. A foliation F of a 3-manifold M is called taut if for every leaf L of
F there exists a simple closed curve y which intersects L and is transverse to all the
leaves of F that it intersects.
Proposition 1.2.5. Let F be a coorientable codimension 1 foliation of a closed 3manifold M. The following are equivalent:
1. F is taut.
2. There exists a simple, closed curve y which intersects every leaf of F.
3. There exists a closed 2-form w which is positive on each leaf.
Since the third criterion is the one useful for obtaining the non-vanishing result
for taut foliations in Floer Homology, 2.3.5, and the first is the usual definition of
tautness, we reproduce the sketch of the proof of 1 => 3, see [2, pg. 157 ].
Proof. Firstly, there is a technical lemma which says that if M is taut, there actually
exists a single closed curve y which meets every leaf, .and is transverse to every leaf.
Given this, we then have a map q : S'1M which is transverse to F, and intersects
every leaf. By "sliding along leaves" we can have ¢ pass through any given point
(this claim is the first step in proving the aforementioned technical lemma). Further,
we can extend 0 to an embedding of D2 x S', so that D 2 X {p} lies in a leaf, p
S 1,
and by compactness we can cover M by the images of finitely many such maps
:D
D 2 x S 1 - M.
Then we let c be a 2-form on D which is positive on the interior of D and 0 on
the boundary. We can pull-back C&by the projection to a form WD on D 2 x S 1 , and
push-forward wD by Oj to a 2-form wj on M. Each wj is closed and positive on the
leaves, so we get our desired w by setting w = Ej w.
Remark 1.2.6. It is easy to see that a taut foliation is Reebless.
LO
The converse
is true for atoroidal manifolds, i.e. manifolds that do not contain an embedded,
incompressible torus. Where a surface E embedded in M is called compressible if
there exists an embedded disk D, such that D n E = D, and OD does not bound
a disk in E. D is then called a compressing disk. If there exists a compressing disk,
then one can obtain an embedded surface of lower genus by surgery on aD c E, so
an incompressible surface is one that "cannot be simplified further." An embedded
surface which does not admit a compressing disk is called incompressible. See [2,
Theorem 4.37, Lemma 4.28].
1.3
Spin Structures
For n > 3, wrl(SO(n))
Z2 and the group Spin(n) is defined as the connected double-
cover of SO(n).
{1} -- Z2 -- Spin(n)
:-
SO(n) -+ {1}
(1.1)
Spin(2) is defined as S1 - S0(2) and 7 : Spin(2) --> SO(2) is the double cover,
7I:ei ý-e2i
Now given a manifold M and a vector bundle E on M, the structure group GL(n)
can be reduced to O(n) by a choice of Riemannian metric, and all such reductions are
equivalent. If E is orientable, the structure group can be reduced further to SO(n)
by a choice of orientation. The SO(n)-principal bundle associated to E is the frame
bundle of E. We will denote the total space of a principal G-bundle associated to
a vector bundle E by PG(E); so the total space of the frame bundle is denoted by
Pso(n)(E).
Definition 4. A spin structure on E is a lift of the frame bundle to a Spin bundle. In
other words, a spin structure is a principal Spin(n) bundle with total space Pspin(n) (E)
and a double cover r : PSpin(n)(E)
-
Pso(n)(E) such that ~(pg) = R(p)r(g), p e
Pspin(n)(E), g E Spin(n). A spin structure on a manifold is a spin structure on its
tangent bundle.
It is very important to be careful at this point. Different spin structures may
correspond to the same underlying principal Spin(n)-bundle. For example, consider
the orientable vector bundle of rank 3 over S 1, so Pso(3)(E) -- S x SO(3), Spin(3)
SU(2) and Pspin(3) (E) a S' x SU(2). Abstractly, there exists only one principal
Spin(3)-bundle. However, there are two distinct spin structures. Indeed, there are two
different Z 2 actions on S' x SU(2), one is trivial on the S' factor and multiplication
by -1 on the second factor, and the other action is the simultaneous multiplication
by -1 on both factors. Similarly, an orientable bundle has two different orientations,
even though, as abstract SO(n) bundles the two oriented bundles are the same.
A Spin structure exists if and only if w 2 (E) = 0, and in that case Spin structures
are in one-to-one correspondence with elements of HI(M, Z 2 ).
The first part of the statement can be seen using Cech cohomology. There is an
open cover Ui c M such that the frame bundle is trivial when restricted to Ui, and
a set of transition functions Oij : Ui n Uj -- SO(n). A lift, then, is a set of functions
ij : Ui n Uj -+ Spin(n) such that p o ij -=
ij, where p : Spin(n) -- SO(n) is
the projection. And ¢ij satisfy the cocycle condition 0ijijk = Oik. The short exact
sequence (1.1) gives rise to a truncated long exact sequence in Cech cohomology:
--
HO(M,
1
SO(n)) Jo__
H (M, Z 2 ) _ H'(M, Spin(n)) 2*
P*• HI(M, SO(n))
J--
H 2 (M, Z2)
(1.2)
Note that the sequence stops after H 2 (M, Z 2 ) since H 2 (M, Spin(n)) is not even defined
since Spin(n) is non-abelian. The ¢ij define an element ý e HI(M, SO(n)), and the
Oij, as above, exist, defining an element.
e H'(M, Spin(n)) if and only if 1()
=
0 E H 2 (M, Z2 ). One can check that 6(6) satisfies the same naturality properties as
w 2 (6), and a computation on the universal example then shows that 6(e) = w 2((). So
a spin structure exists if and only if w 2 = 0. The same conclusion can be reached by
obstruction theory [7, §5.6] (see [23, §12]) for characteristic classes as obstructions).
Note that (1.2) does not show that spin structures are in one-to-one correspondence
with elements of H'(M,Z 2), though, this is sometimes mistakenly asserted. To see
the latter, we need a different exact sequence, as in [17, Chapter II §1], or (in much
less detail) [7, Definition 1.4.24].
Consider the E p ' =- HP(M, HZ(SO(n),Z2)) page of the Serre spectral sequence
with Z2 coefficients for the fibration SO(n) 4 Pso(n)(E) -+ M.
i
1 H'(SO(n), Z2)
0
Z2
HI(M, Z2)
H2(M, 22)
0
1
2
In the fragment of the spectral sequence shown there is only one differential from
,0'1
H'(SO(n), Z2) to E2-, = H2 (M, Z2), and this fragment gives H1 of the total
space, or rather places it in an exact sequence:
0 -+ H'(M, Z2) - H'(Pso(n)(E),Z2)
Ž-
H'(SO(n), Z2)
-
H 2 (M, Z 2 ) -- 0
(1.3)
Once again, we note that d(1) e H 2 (M, Z2) is natural, and is non-zero on the universal
example, and therefore, d(1) = w 2 (E). Now, spin structures are double covers of
Pso(n) (E) which restrict to non-trivial double covers on the fiber. We have:
{2-covers of Pso(n)(E)} - {index 2 subgroups of rl (Pso() (E))}
Hom(7rl(Pso(n)(E)), Z2) r Hom(Hi(Pso(n)(E), Z), Z2)
H'(Pso(n)(E), Z2).
(1.4)
So the double covers of Pso(n)(E) which restrict non-trivially to the fibers, are exactly
the ones that are mapped to the non-zero element of H'(SO(n),Z2)
Z2 by t, in
(1.3). Such double covers will exist if and only if d(1) = w 2 (E) = 0. Further, in that
case spin structures are in one-to-one correspondence with HI(M, Z2), though, this
bijection is not canonical. However, the difference between any two spin structures,
s - s', is canonically identified with an element in HI(M, Z2), since this difference lies
in ker i. which is the same as the image of HI(M, Z2 under the injective map in (1.3).
Another way of stating this, is that the set of Spin structures has a canonical, free
and transitive action of H'(M,Z2). See [8, Chapter 1] for a readable introduction to
the Serre spectral sequence.
Finally, a spin structure can be seen from the point of view of homotopy theory
as a lift of the map M -+ BSO(n), which corresponds to the frame bundle, to
M -+ BSPin(n).
BSpin(n)
M-
-f
BSO(n)
Further, we have a fibration BZ2 -- BSpin(n)
-B
BSO(n), and since BZ2
RP
is a K(Z 2 , 1), the cofiber of Bwx is a K(Z2 , 2), so that we have a fibration
BSpin(n) B- BSO(n)
-
K(Z2, 2).
Now, [M, K(G, n)] r Hn(M, G)], and again by naturality and computation on the
universal example, [w o fE] e [M, K(Z2, 2)] = H 2 (M, Z2) can be seen to be w 2 (E).
We also see that a lift (i.e. a spin structure) exists if and only if w2(E) = 0. See [9,
Chapter 4.H] for a discussion of cofibrations, and [9, Chapter 4.3] for the isomorphism
[M, K(G, n)]-
H(M, G)].
In dimension 3, every orientable manifold admits a spin structure, and in fact
is parallelizable, [23, Exercise 12.B]. Indeed, trivializing the tangent bundle of an
oriented 3-manifold is the same as finding a section of the associated Stieffel bundle
V3 - SO(3) whose fiber over a point consists of all triples of orthonormal vectors
(M can be assumed to be equipped with some arbitrary Riemannian metric). But
since M is oriented, a pair of orthonormal vectors at a point uniquely determines a
third; hence, V3
1V2, the Stieffel bundle of pairs of orthonormal vectors. There is
no difficulty finding a section over the 1-skeleton. The obstruction to extending the
section over the 2-skeleton is w 2 , [23, Theorem 12.1]. But by the Wu formula, [23,
Theorem 11.14], w 2 = wl uw 1 = 0, since wl = 0, since M is orientable. So the section
extends over the 2-skeleton. Now, w2 (V2 ) _
27
2 (SO(3))
7 2 (RP3 ) Y i2 (S 3 ) = 0, so
a map of S 2 -- V2 extends to the 3-ball, and hence the trivialization can be extended
to the 3-skeleton, or in other words, all of M.
An equivalent definition of Spin-structure that we will need in Section 1.4 is that a
Spin-structure on E, a SO(n) principal bundle over M, is a choice of the trivialization
of E over M 2 , the 2-skeleton of M, see [20] or for a fairly detailed account, [7, §5.6].
To see that this definition is equivalent to Definition 4, we note that PSpin(n) M2 has a
section, that is unique up to homotopy because -j(Spin(n)) = 0 for j = 0, 1, 2, 3, and
this gives a section of Pso(n) by composing the section with the projection Pspin(n)
Pso(n). Thus, we have a map from the set of Spin structure in the sense of Definition 4
to the set of Spin structures in the new sense.
The two notions of Spin structure coincide because we can check that this map
is equivariant under the H'(M, Z2) action.
The H'(M, Z2) action on the set of
trivializations of E over M 2 arises as follows.
Two Spin structures s and s' are
trivializations of E over M 2 , and so also give trivializations
the 1-skeleton. If 7 and
T'
T
and
T'
of E over M1,
coincide on the 0 skeleton, the difference
assignment of an element of 7 (SO(n))
T
-
T'
is an
Z2 to each 1-handle, or in other words a
cochain, d(T, 7'). Since both 7 and T' extend over M 2 (since both arose from a Spin
structure), d(T, 7/') is actually a cocycle. We assumed that 7 and 7' coincide on the
0-skeleton. If they do not, we can force them to coincide by homotopy, and such
a homotopy changes d(T, 7') by a coboundary; further, any change in d(T, 7') by a
coboundary can be realized by a change in 7' on the 0 skeleton. Hence, d(T, 7') gives
rise to a well-defined difference class in H'(M, Z2), which gives the action of this
latter group on the set of Spin structures in this setting.
For our purposes, we also need a slightly different notion, that of a SpinC structure.
The group SpinC(n) is defined as S 1' xz2 Spin(n), i.e. the quotient of S' x Spin(n) by
the simultaneous Z2 action. We thus have short exact sequences
{1} -
' x Spin(n) -- SpinC(n)
Z2
{1} -- Z2
-
-
{1}
(1.5)
SpinC(n) -> S x SO(n) -
{1}
(1.6)
where the action of Z2 in (1.6) is generated by the element [(-1, 1)] = [(1, -1)]
e
Spinc.
Definition 5. A Spine structure is a principal SpinC(n)-bundle and a principal S'bundle together with a double cover -k : PSpinc(n)(E) -+ Psi x Pso(n)(E) which is
7r : SpinC(n) --+ S' x SO(n) fiberwise, and equivariant as in the case of Spin structures;
in other words, i(pg) = r(p)r(g), p e Pspinc(n)(E), g e SpinC(n). The S' bundle Psi
is called the determinant line bundle of the SpinC structure.
A Spinc structure exists if and only if w2 (E) is the mod-2 reduction of an integral
class, and the set of Spinc structures is parametrized by 2H 2 (M, Z) ( H1 (M, Z2). We
can see the former, as in the case of Spin structures via the exact sequence in Cech
cohomology
...--
H1 (M, Z 2) -+ Hl(M, SpinC)-+ H1 (M, SO(n))
H'(M,S1 )
W2+8)
H 2 (M,
2
2).
where E, is the mod-2 reduction of the Chern class of the line bundle in H1 (M, S1 ).
If w2 (E) is the mod-2 reduction of an integral class, and using the isomorphism
H 1 (M, S1 )
-~+
H 2 (M, Z), we can find a line bundle L, such that w2 (E) - c (L)
mod 2, so that (w 2 + cl)(PSO(n)(E), L) = 0 and so the exact sequence above tells us
that there exists a Spin c structure.
To see that Spinc structures are parametrized by 2H
2 ( M,Z)
E H1 (M, Z2) we
again need a fragment of the Serre spectral sequence for the fibration S' x SO(n) 4+
Psi x Pso(n)(E) - M, and the fact that double covers correspond to H (-, Z2)1
H(S' x SO(n), Z2)
0
Z2
H1 (M, Z2) H 2(M, Z2)
0
1
As before we get only one differential d
2
H 1 (S' x SO(n),Z2) --+
2(M,
2),
and
we note that H 1 (S' x SO(n),Z2) z H1 (S1 , Z 2) E H'(SO(n),Z 2 ). Once again, by
naturality and a computation on the universal example, we identify d(0, 1) = w2 (E)
and d(1, 0) = aýZ(L) where L is the line bundle Psi -+ M. The long exact sequence
analogous to (1.3) is
0 -+ H'(M,Z2)
*,- H'(Ps ,Z2)
O H 1 (Pso(n)(E), Z2)
H'(S1 , Z2) E H (SO(n),Z2)
-_
d=1+w2>
H 2 (M, Z2) --+ 0
(1.7)
It follows as before that there exists a double cover of PSI x Pso(n)(E) for some
line bundle L with total space Psi, if and only if w 2(E) is the mod-2 reduction of
an integral class. If that is the case, i.e. w 2 (E)-
a mod 2 for some a e H 2 (M, Z),
then for all x E H 2 (M, Z), there is a double cover of L0 L 2 X Pso(n)(E) which is
SpinC(n) -* S' x SO(n) fiberwise and equivariant as required, and where L2x denotes
the line bundle with c1 (L 2x) = 2x. In other words, if there exists a Spine structure
with determinant line bundle L, then there exists a Spin c structure with determinant
line bundle L 0 L 2x for any x e H 2 (M, Z). Further, (1.7) shows that any two Spinc
structures with fixed determinant line bundle differ by an element in p, (HI(M,Z 2 )),
and since p, is injective in (1.7), we conclude that Spinc structures are parametrized
by H (M, Z 2 ) E 2H 2 (M, Z).
A Spin structure induces a canonical Spinc structure in the obvious way. Less
obviously, almost complex manifolds also carry a canonical Spinc structure. Also, on
a 3-manifold, a plane field ý defines a Spinc structure, since SpinC(3) = U(2), and a
plane field ( determines a complex structure on TM E IR.
1.4
Plane fields
The Floer Homology of a 3-manifold M is graded but not by Z, but rather by homotopy classes of plane fields on M. A very convenient description of the set of homotopy
classes of plane fields on a 3-manifold is due to Gompf, [6, §4], or [7, Theorem 11.3.4]
for the highlights. We describe Gompf's invariant 0(ý) E H 2 (M, Q) of a plane field (
in the case that cl (6)is a torsion class in H 2 (M, Z).
The tangent bundle of an orientable 3-manifold is trivial, and homotopy classes of
plane fields obviously correspond to homotopy classes of non-vanishing vector fields.
Therefore, if a trivialization of the tangent bundle is fixed, the set of homotopy classes
of plane fields is in one-to-one correspondence with [M, S 2], the homotopy classes of
maps from M to S2 . This set was first understood by Pontrjagin in [251. However,
this bijection crucially depends on the choice of trivialization of TM; hence, another
set of invariants is desirable.
It can be shown that an oriented plane field ( on an oriented, closed connected
3-manifold M can be realized as an almost complex boundary of a compact, almostcomplex 4-manifold X; that is,
aX
= M and ( is invariant under the almost com-
plex structure J, see [6, Lemma 4.4]. We would like to define 0(e) by c'(X, J) 2x(X) - 3o(X) where x(X) is the Euler characteristic and u(X) is the signature.
However, cl (X, J) e H 2 (X, Z) and H 2 (X, Z) does not have an intersection pairing,
since H 4 (X, Z) = 0, since X has a non-empty boundary. However, if
aX
= M is a
rational homology sphere, meaning HI(M, Q) = 0, then the long exact cohomology
sequence for the pair (X, M) shows that H 2 (X, Q)
H 2 (X, M, Q); indeed:
0= H(M,Q) - H2 (X, M, Q)-+ H2(X,Q) -+H2(M,Q) H (M,Q)= 0.
There is a well-defined, non-zero pairing H 2 (X, Q) x H 2 (X, M, Q) -- H 4 (X, M, Q)
Q, which then gives a quadratic form on H 2 (X, Q) in the case HI(M, Q) = 0. We
can then define the square of the Chern class, c1(X, J), and 0(e) as above, c2(X, J)2x(X) - 3a(X).
Now, suppose (M, () and (AM, ý) are the almost-complex boundaries of two almost
complex manifolds (Xo, Jo) and (X 1 , J1 ), where M is M with the opposite orientation,
and let 0o and 01 denote the values of the above invariant coming from Xo and
X1 respectively.
Then we can form the manifold X = Xo uM X 1 , which clearly
inherits an almost complex structure J. c (X, J) - 2x(X) - 3u(X) = 0 for an almost
complex manifold (in fact, the quantity a(c2(X)-2x(X)-3au(X)) is the 4-dimensional
obstruction to extending an almost complex structure from the 3-skeleton to the 4skeleton). Further, all three terms, cl, X and o, are additive under gluing (this fact
for the signature is known as Novikov additivity). Hence, 00 = -01,
defined for an oriented M and plane field ý.
and so 0 is well
1.5
Special surgeries
In this section we show using Rolfsen moves [7, Theorem 5.3.6] how to obtain several
interesting spaces by surgery on particularly simple knots.
Example 1.5.1. The Poincar6 Homology Sphere can be obtained in several interesting ways, see for example [13], in particular, as the boundary of the E8 plumbing.
We show by a sequence of Rolfsen moves how to go from that description to the +1
surgery on the right-handed trefoil. Actually, the picture below show the -1 surgery
on the left-handed trefoil.
p+4
+2
+p
+1
p+6
Now we let
-2
-1 43
1
-2
-2
-2 Ah
-2 -2
-2 -2
c
w
rw
-2
Am
-2-2
Mr
-2
w
Example 1.5.2. In this example we show that the +5 surgery on the right-handed
trefoil yields L(5, 1), the lens space (5, 1), with the opposite orientation from the one
induced by the usual description of lens spaces as quotients of S3 c C2 by the complex
action of Zp.
As in the example with
the Poincare Homology Sphere
+2
+5
+2
-1/3
+>
0
+3
Example 1.5.3. Similar to the previous example, we show that the +9 surgery on the
(2, 5) torus knot, T(2, 5), yields L(9, 7) (with the same remark concerning orientations
as above).
P
-1/2
-1/2
-3/2
+inf
-5/2
If p = 9 or p = 11 the p - 10 circle will have a coefficient of ± 1, so it can be blown
down, and then we can repeatedly slam dunk to get a diagram with just one unknot.
If p = +9, for the surgery coefficient we get
5
1
2 0- -21
5
2
-- 2--5
2=-
9
2
So the +9 surgery on the (2, 5)-torus knot yields the lens space L(9, -2), which is the
same as L(9, 7). Similarly, if p = +11, we get L(11, 3) - L(11, 4).
Chapter 2
Floer Homology
2.1
Morse Homology
Floer Homology is an infinite-dimensional analog of Morse Homology, which is a way
to recover the usual homology H.(M, Z) of a manifold M from a Morse function on
M and a Riemannian metric. Hence, we briefly discuss Morse Homology, following
[10] and [16, §2, Chapter I].
Definition 6. Let f : M --+ R be a Morse function and p a critical point. Let g be a
Riemannian metric, so that the gradient of f is defined as usual, g(Vf, V) = df(V) for
all vector fields V. The flow of -Vf defines a one-parameter group of diffeomorphisms
Tt : M --- M. The stable or ascending manifold S(p) and the unstable or descending
manifold U(p) are defined by
S(p) = {q e M
I
lim It(q) = p}
(2.1)
U(p) = {q e M
I
lim It(q) = p}.
(2.2)
The stable and unstable manifolds are, first of all, in fact manifolds, and secondly,
dim U(p) = ind(p), dim S(p) = dim M - ind(p).
Definition 7. The pair (f, g) is called Morse-Smale if the intersection of the stable
manifold S(p) and the unstable manifolds U(q) is transverse for all pairs of critical
points p, q.
If p and q are two critical points then the set of flow lines, modulo translation,
from p to q is (U(p) n S(q))/R, where R acts by Jt. By the Morse-Smale condition,
this set is a manifold M(p, q), and dim M(p, q) = ind(p) - ind(q) - 1. The first crucial
fact is that when the indices of p and q differ by 1, M(p, q) is compact, and since it
is 0-dimensional, M(p, q) is then just a finite set of points. The second fact is that if
the indices of p and q differ by 2, then M(p, q) can be compactified to a 1-dimensional
manifold with boundary by adding in "broken flow lines," i.e. flow lines that go from
p to r and then from r to q where r is a critical point whose index lies between the
index of p and that of q.
If these two facts are taken as given, then we can define Ck = Z 2 {pI ind(p) = k},
where we use Z 2 coefficients instead of Z to avoid discussing orientations on the spaces
M(p, q). We further define dk: Ck ` Ck-1 by d(p) = Zq,ind(q)=k-11M(p, q) - q, where
M(p, q) I denotes the mod-2 count of the number of points in M(p, q) (or the signed
count, if appropriate orientations have been introduced).
We then have the following theorem.
Theorem 2.1.1. d 2 = dk o dk-1 = 0.
Proof.
d2 (p) = dk(dk-i(P)) =
,d
q,ind(q)=k-2
The quantity (r,ind(r)=k-1
kllM
M(qind(q)=p-2
r)M(r,q ))
q.
r,ind(r)=k-1
M(p, r) lM(r, q)J) is exactly the number of "broken flow
lines" from p to q, or in other words, the mod-2 (or properly signed) count of the
boundary points of the compactified M(p, q). Since the number of boundary points
of a compact 1-dimensional manifold is 0, the theorem follows, at least with Z 2
coefficients.
O
Theorem 2.1.1 allows us to define HMse (M, f, g) as the homology of the complex
(Ck, dk). Further, one can prove that HMorse(M, f, g) - H.(M), where H.(M) is the
ordinary homology of M. In particular, H"°Se(M, f, g) is actually independent of f
and g. This latter fact can also be proved independently.
2.2
Monopole Floer Homology
2.2.1
General Definitions and Theorems
The idea of Floer Homology is to replicate the Morse Homology construction but in
an infinite dimensional setting. Monopole Floer Homology is constructed by mimicking the construction of the Morse complex for the Chern-Simons-Dirac functional,
£(B, '),
which is a function of a Spin c connection B and a section T of the corre-
sponding spin bundle,
(B, ) = -
(B- B) (FBt -
)dol +
(D , )dvol.
(2.3)
Bt denotes the connection induced on A 2 S and F is the curvature 2-form.
The critical points of the Chern-Simons-Dirac functional are exactly the solutions of the Seiberg-Witten equations on M, and the gradient flow equations are the
Seiberg-Witten equations on the cylinder M x R. There are several steps in replicating the Morse Homology construction in this setting. Firstly, one needs compactness.
Secondly, there are technical difficulties which arise from reducible solutions, i.e. solutions where I = 0. Thirdly, one must perturb the equations to achieve transversality
analogous to the Morse-Smale condition in the finite dimensional case. Fourth, one
must "glue" trajectories near critical points to show that the moduli space of trajectories can be compactified by adding broken trajectories. These steps are carried out
in [16].
The result is three functors HM., HM. and HM. from the category of non-empty,
connected, compact oriented 3-manifolds without boundary and oriented cobordisms
as morphisms to the category of Abelian groups. These functors are connected by
natural transformations i,, j, and p,.
S..
HM.(M)
HM.(M) -P HM.(M)
...
·
(2.4)
All three groups can be decomposed using Spin c structures,
HM(M) =
e
HM(M, s),
seSpinC(M)
and the maps i,,j, and p, respect this decomposition, as do the maps arising from
cobordisms.
In the course of constructing these groups, the following is also proved in [16].
Proposition 2.2.1. If a closed 3-manifold M admits a metric of positive scalar
curvature, then j, = 0 in (2.4).
Proposition 2.2.2. Let W be a cobordism from some 3-manifold Yo to some 3manifold Y 1 . If b2 (W) = 1 then HM.(W) = 0.
Proposition 2.2.3. Let X be a closed, oriented smooth 4-manifold with b+ > 1. Let
E be a connected, oriented surface embedded in X of genus at least 1, with E · >,0.
Then
2g(E) - 2
E(c)I + E E
(2.5)
for all basic classes c E H 2 (X, Z).
Proposition 2.2.4. Let E be a smoothly embedded, oriented, connected 2-manifold
in a 3-manifold M of genus at least 1. Let s be a Spinc structure. If I(ci(s), E)I >
2g(E) - 2 > 0, then the group HM. (M, s) is 0.
2.2.2
The Surgery Exact Triangle
The principal tool using which the Floer Homology groups can be computed is the
surgery exact triangle.
Proposition 2.2.5. Let K be a knot in S3 and let p E Z, p > 0, then
HM(S 3 ) HM(Wo)> HM(S3(K))
(2.6)
IHM(W1)
HMW)
HM (S+ (K))
is exact. HM(Wo), HM(W1 ) and HM(W2 ) are just the names for the cobordisms
correspondingto the surgery and HM can be any of the three possible versions (HJM.,
HM.or HIM.).
2.3
L-spaces
Definition 8. A closed 3-manifold M is called an L-space if j, = 0 in the long exact
sequence (2.4).
Such manifolds have much simpler Floer homology than general manifolds. The
term L-space is supposed to suggest that the Floer homology of these spaces is similar
to that of Lens spaces which are the simplest examples of L-spaces, by Proposition
2.2.1 above.
Proposition 2.3.1. Suppose S,(K) is an L-space for some knot K c S 3 , n C N.
Then S3p(K) is an L-space for all p > n.
Proof. The surgery exact triangle (2.6) gives us a commutative diagram with exact
rows and columns, Figure 2-1. A diagram chase shows that j,: HM.(S p+(K))
HM.(SP+(K)) is also 0.
Indeed, let a
e
-
HM.(SP+1 (K)), and b = j,(a), b e
HM.(S3+(K)). We have
p (HM.(W2 )(b)) = HM.(W 2 )(p,(b)) = HM.(W2 )(p, oj*(a))= 0
0
But p, : HM.(S 3 ) --+ HM.(S3 ) is injective since S 3 is an L-space (i.e. j, = 0
in the long exact sequence which constitutes the first column of Figure 2-1).
So
I j, =0
HM.(W 2 HM.(S 3 )
H.L2-HM.(S3) HMH(Wo
HM.(W 2
M.S 3 )
H-M. (SIjP*3,(K))
HM.(S (K))
P
HM.(S,-(K)) HM.(W
(
H-.(Sp3+(K)) HM.(W2
HM.(W 2 HM.(S 3 )
-HM.(S>3+,(K))
{eo
j*=o
Figure 2-1: Commutative diagram with exact rows and columns
HM.(W2 )(b) = 0. By exactness of the rows, there exists a c e HM.(SP(K)) such
that HM.(Wi)(c) = b. Now
HM.(Wi)(p,(c)) = p,(HM.(W1)(c)) = p,(b) = p, o j,(a) = 0.
But p, : HM.(S3(K)) -+ HM.(S3(K)) is injective since S3(K) is an L-space by
assumption, and HM.(W1 ) : HM.(S,(K))
HM.(Wo)
HM.(S 3 )
-+
-+ HM.(SP+,(K)) is injective since
HM.(S (K)) is 0 by Proposition 2.2.2, since b+(Wo) = 1.
Hence, c = 0, and so j,(a) = b = HM.(W 1)(c) = 0.
OI
In fact, the following more general Proposition is true.
Proposition 2.3.2. Let M be a connected, oriented 3-manifold with aM = T 2, and
three simple closed curves on the boundary Ti, i = 0, 1, 2, as in the discussion of the
surgery exact triangle. Suppose Mo, M1 , M 2 are obtained from M by attaching a
2-handle along 0y, y1, 72 respectively, also as in the discussion of the surgery exact
triangle. Then if Mo and M1 are L-spaces, so is M 2 .
Proposition 2.3.1 allows us to conclude that if some surgery coefficient yields an
L-space for some knot in S3 , then all bigger surgery coefficients will as well. We can
actually, conclude that smaller surgery coefficients will yield L-spaces as well, but
only up to the slice genus of the knot.
Proposition 2.3.3. Suppose S (K) is an L-space for some knot K c S
,
n E N.
Then Sap(K) is an L-space for all p >, 2g, - 1, where g, is the slice genus of K.
Proof. As in the proof of Proposition 2.3.1 we refer to the commutative diagram
in Figure 2-1 with exact rows and columns. Suppose Sp+,(K) is an L-space, and
p > 2g, - 1, then we show that j. : HM.(S (K)) -- HM.(S (K)) cannot be nonzero, i.e. that it is 0, and so S3(K) is an L-space.
Let SpinC(Wo) = {sn,p} be the set of SpinC structures on Wo, and index them
so that (cl(s,,p), E) = 2n - p. Let j,,p be a homotopy class of plane fields which
determines the Spinc structure S,,p.
Suppose to the contrary that j.
- 0. Then there exists a non-zero element
a e HMj,(S3(K)), and there exists an element b e HM.(S3(K)) such that j.(b) = a.
p,(HIM.(Wi)(a)) = HM.(Wi)(p,(a)) = HM.(W) (p* o j,(b)) = 0,
but p,: HM.(S 3,(K)) --+ HM.(S,+1(K)) is injective by assumption, so
HM.(Wi)(a) = 0. So there is a c e HM.(S3 ) such that HM.(Wo, s,,p)(c) = a. Then
MWo,,(a, Wo, c)00
Now, H2 (Wo, Z) is generated by the embedded surface E formed as the union of
a slice surface for K, of genus gs, union the core of the 2-handle which is added to
form Wo.
By an appropriate version the adjunction inequality, Proposition 2.2.3,
I(ci(sn,p, h)J + E - E < 2 g, - 2.
So 2n -p +p < 2g9 - 2 and p - 2n + p
2g, - 2, which gives p ; 2gs - 2.
O
Proposition 2.3.4. If S,3(K) is an L-space for some knot K c S 3 , r E Q\Z, then
S 3(K) is an L-space for p = [r], where [r] denotes the smallest integer greater than r.
There is a non-vanishing theorem for the Floer Homology of manifolds which
admit taut foliations, [15, Theorem 2.1] or [16, Theorem 41.4.1].
Theorem 2.3.5. If M is a closed 3-manifold with a taut foliation, then
j. : HM.(M) _+
-- HM.(M)
is not 0.
Hence, we have the following corollary:
Corollary 2.3.6. L-spaces do not admit taut foliations.
In particular, since +18 surgery on the (-2, 3, 7)-pretzel knot yields the lens space
(18, 7), [5], and the genus of the (-2, 3, 7)-pretzel is 5, all surgeries on this knot with
coefficient larger than or equal to 9 do not admit taut foliations. This is interesting,
since this knot is hyperbolic, hence, all but finitely many surgeries on it are hyperbolic
manifolds.
More generally, if n > 7 is an odd integer, then the 2n+4 surgery on the (-2, 3, n)pretzel knot yields a Seifert fibered manifold, which can be shown to be an L-space
by Proposition 2.3.2. Hence, for surgeries with coefficient r > n + 2, the r-surgery on
the (-2, 3, n)-pretzel knot does not admit taut foliations. In [11] taut foliations are
constructed on the surgeries on the (-2, 3, 7) pretzel with coefficient less than 1. It
is unknown what happens for coefficients between 1 and 9.
2.4
Some Calculations
We now reproduce some computations of Floer homology for some L-spaces, beginning with S3 .
Example 2.4.1. S3 is one of the few 3-manifolds where a calculation of the Floer
Homology is possible directly from the definitions, see [16, §22.7]. But one can also
deduce the Floer Homology of S3 from the module structure on Floer Homology, see
[15, Proposition 3.1]. Namely, there is an endomorphism U of degree -2 which makes
the Floer Homology groups modules over Z[[U]]. Further, the maps i,., j, and p.
have degrees 0, 0, and -1 respectively. Then, since j, is 0 because S 3 admits a metric
of constant scalar curvature, and S3 admits a unique Spin c structure, we conclude
that the long exact sequence (2.4) turns into
0-+ HM.(S3 )
_ HM.(S 3)
-- HM.(S 3 ) -+ 0
(2.7)
It turns out, from the definitions that HM. for a rational homology sphere can
be explicitly computed, HM.(M, s) ~ Z[U- 1 , U]], where s is a Spinc structure on M
and Z[U- 1 , U]] denotes the ring of formal Laurent series in U finite in the negative
direction. It follows that (2.7) is isomorphic to
0 -+ Z[[]] --+ Z[U-, U]] -- Z[U- , U]]I/Z[[UII -
0.
In other words, the Floer Homology groups are give by ([16, §3.3, Figure 3]):
n
-3 -2
-1
0
+1
+2
+3
...
HM2+n ...
Z
0
Z
0
0
0
0
...
HM+n ...
0
Z
0
Z
00
Z
0
.--
HM+ .0 0 0 Z 0
Z
0 ...
The notation ý + n corresponds to the plane field obtained by the action of Z on
the plane field ý, where ( is the field of planes orthogonal to the Hopf fibration.
Example 2.4.2. With the computation of Floer Homology for S 3 , Proposition 2.2.1,
and the surgery exact triangle, Proposition 2.6, it is easy to compute the Floer Homology of L(p, 1). Essentially the answer is a copy of the picture for S 3 in each of
the p Spin c structures. The gradings by plane fields are also easy to calculate, see
[15, Proposition 3.3 ].
This machinery and these computations, together with the surgery exact triangle,
allowed the authors of [15] to prove that if there is an orientation preserving diffeomorphism from S,(K) to S,(U) where K is a knot in S3 , U is the unknot and r e Q,
then K is also the unknot.
Bibliography
[1] William Browder. Surgery on simply-connected manifolds. Springer-Verlag, New
York, 1972. Ergebnisse der Mathematik und ihrer Grenzgebiete, Band 65.
[2] Danny Calegari. Foliationsand the geometry of 3-manifolds. Oxford Mathematical Monographs. Oxford University Press, Oxford, 2007.
[3] Alberto Candel and Lawrence Conlon. Foliations. II, volume 60 of Graduate
Studies in Mathematics. American Mathematical Society, Providence, RI, 2003.
[4] Ronald Fintushel. Knot surgery revisited. In Floer homology, gauge theory, and
low-dimensional topology, volume 5 of Clay Math. Proc., pages 195-224. Amer.
Math. Soc., Providence, RI, 2006.
[5] Ronald Fintushel and Ronald J. Stern. Constructing lens spaces by surgery on
knots. Math. Z., 175(1):33-51, 1980.
[6] Robert E. Gompf. Handlebody construction of Stein surfaces. Ann. of Math.
(2), 148(2):619-693, 1998.
[7] Robert E. Gompf and Andras I. Stipsicz. 4-manifolds and Kirby calculus, volume 20 of Graduate Studies in Mathematics. American Mathematical Society,
Providence, RI, 1999.
[8] Allen
Hatcher.
Spectral
sequences
in
algebraic
topology.
http://www.math.cornell.edu/ hatcher/SSAT/SSATpage.html.
[9] Allen Hatcher.
2002.
Algebraic topology. Cambridge University Press, Cambridge,
[10] Michael Hutchings. Lecture notes on Morse Homology (with an eye towards
Floer Theory and pseudoholomorphic curves. http://math.berkeley.edu/ hutch-
ing/teach/276/mfp.ps.
[11] Jinha Jun. (-2, 3, 7)-pretzel knot and Reebless foliation. Topology Appl., 145(13):209-232, 2004.
[12] Michel A. Kervaire and John W. Milnor. Groups of homotopy spheres. I. Ann.
of Math. (2), 77:504-537, 1963.
[13] R. C. Kirby and M. G. Scharlemann.
Eight faces of the Poincar6 homology
3-sphere. In Geometric topology (Proc. Georgia Topology Conf., Athens, Ga.,
1977), pages 113-146. Academic Press, New York, 1979.
[14] Robion Kirby. A calculus for framed links in S3 . Invent. Math., 45(1):35-56,
1978.
[15] P. Kronheimer, T. Mrowka, P. Ozsv6th, and Z. Szab6. Monopoles and lens space
surgeries. Ann. of Math. (2), 165(2):457-546, 2007.
[16] P. B. Kronheimer and T. S. Mrowka.
Floer homology for Seiberg-Witten
Monopoles. Cambridge University Press, 2007.
[17] H. Blaine Lawson, Jr. and Marie-Louise Michelsohn. Spin geometry, volume 38
of Princeton Mathematical Series. Princeton University Press, Princeton, NJ,
1989.
[18] W. B. Raymond Lickorish. An introduction to knot theory, volume 175 of Graduate Texts in Mathematics. Springer-Verlag, New York, 1997.
[19] J. Milnor. Morse theory. Based on lecture notes by M. Spivak and R. Wells.
Annals of Mathematics Studies, No. 51. Princeton University Press, Princeton,
N.J., 1963.
[20] J. Milnor. Spin structures on manifolds. Enseignement Math. (2), 9:198-203,
1963.
[21] John Milnor. A procedure for killing homotopy groups of differentiable manifolds.
In Proc. Sympos. Pure Math., Vol. III, pages 39-55. American Mathematical
Society, Providence, R.I, 1961.
[22] John Milnor. Lectures on the h-cobordism theorem. Notes by L. Siebenmann and
J. Sondow. Princeton University Press, Princeton, N.J., 1965.
[23] John W. Milnor and James D. Stasheff. Characteristicclasses. Princeton University Press, Princeton, N. J., 1974. Annals of Mathematics Studies, No. 76.
[24] Amiya Mukherjee. Topics in differential topology, volume 34 of Texts and Readings in Mathematics. Hindustan Book Agency, New Delhi, 2005.
[25] L. Pontrjagin. A classification of mappings of the three-dimensional complex into
the two-dimensional sphere. Rec. Math. [Mat. Sbornik] N. S., 9 (51):331-363,
1941.
[26] V. V. Prasolov and A. B. Sossinsky. Knots, links, braids and 3-manifolds, volume 154 of Translations of Mathematical Monographs. American Mathematical Society, Providence, RI, 1997. An introduction to the new invariants in
low-dimensional topology, Translated from the Russian manuscript by Sossinsky
[SosinskiY].
[27] Andrew Ranicki. Algebraic and geometric surgery. Oxford Mathematical Monographs. The Clarendon Press Oxford University Press, Oxford, 2002. Oxford
Science Publications.
[28] William P. Thurston.
Three-dimensional geometry and topology. Vol. 1, vol-
ume 35 of PrincetonMathematicalSeries. Princeton University Press, Princeton,
NJ, 1997. Edited by Silvio Levy.
[29] C. T. C. Wall. Surgery on compact manifolds. Academic Press, London, 1970.
London Mathematical Society Monographs, No. 1.
[30] Andrew H. Wallace. Modifications and cobounding manifolds. Canad. J. Math.,
12:503-528, 1960.