Post Launch Assessment Review
advertisement

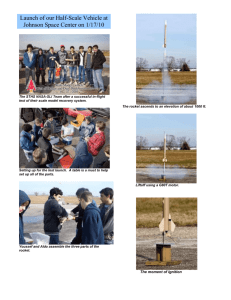
Post Launch Assessment Review University of South Alabama Launch Society Conner Denton, John Faulk, Nghia Huynh, Kent Lino, Phillip Ruschmyer, Andrew Tindell Department of Mechanical Engineering 150 Jaguar Drive, Mobile, Al, 36688 1 of 9 American Institute of Aeronautics and Astronautics Contents I Team Name 3 II Motor Used 3 III Team Mentor 3 IV Payload Summary 3 V Vehicle Dimensions 3 VI Altitude Obtained 3 VII Vehicle Summary 4 VIII Data Analysis & Results of Payload 4 IX Scientific Value 5 X Lessons Learned 7 XI Overall Experience 7 XII Educational Engagement 8 XIII Budget Summary 8 2 of 9 American Institute of Aeronautics and Astronautics I. Team Name The team’s name is University of South Alabama Launch Society and the vehicle is named Fancy. II. Motor Used The motor selected and used for this rocket vehicle is an Aerotech K1103X. III. Team Mentor The University of South Alabama Launch Society’s team mentor is Mr. Kendall Brent, level 3 Tripoli certified. Mr. Brent is a retired veteran that has over 40 years of rocketry experience and has been involved with the USLI competition annually. IV. Payload Summary There will be two payloads integrated upon the vehicle: the hazard detection system and a wind turbine energy generation system. The hazard detection payload is capable of spotting any hazardous objects upon descent of the vehicle and will determine the north and east coordinates of the hazards relative to the descending rocket. The other design payload will be our wind turbine energy generation system that will generate and store voltage upon ascent of the vehicle. This payload will be a fail-safe system that will that the energy attained from the turbine will be enough to power a drogue parachute deployment. V. Vehicle Dimensions Our final vehicle dimensions of the rocket is a total of 94 inches in length, 4 inches in width, with a 1/4 inch thickness of the body tube. The final schematic of the rocket dimensions is shown below. Figure 1: Dimensions of the sub components of Fancy. VI. Altitude Obtained During the launch of Fancy at the NASA USLI Competition in Hunstville, AL, the rocket initiated liftoff at first. However, due to motor malfunction, the motor was ejected out the aft end of the vehicle and proceeded into a cartwheeling effect in mid air until the propellant burned out. The catalyst of this catastrophic take off was a critical leak of the propellant in the motor due to the absence of the delay grain 3 of 9 American Institute of Aeronautics and Astronautics in the rocket motor. This caused the propellant to burst through the top of the motor casing and induce a larger nozzle at the top than the normal propellant exhausting out from the bottom end. A professional photo taken at the launch is shown below. In light of this unfortunate event, our gathered altitude of this rocket was 900 ft. Figure 2: Photo of Fancy in mid-flight from NASA USLI Competition. VII. Vehicle Summary The vehicle is 94 inches in length and weigh approximately 15.758 pounds. The motor selected for the vehicle is a reloadable AeroTech K1103X. The recovery system will consist of a dual deployment style of ejection where there will be two parachutes deployed: a main and a drogue. The drogue parachute will be ejected first via black powder charge once the rocket attains apogee. As the rocket is descending, the main parachute will be ejected via black powder charge at a fixed altitude. The use of altimeters is vital in order to execute this method of deployment. The parachute selection was based upon the drag characteristics in order to obtain a safe, smooth descent for the recovery of the vehicle. VIII. Data Analysis & Results of Payload Flight time and altitude of the rocket were cut short due to an error in the building of the motor. The stratologger altimeter used on the rocket gave a maximum rocket altitude of about 900 feet. Since the rocket reached such a low altitude no black powder deployment event occured during flight. 4 of 9 American Institute of Aeronautics and Astronautics One repercussion to the lack of deployment was the non-deployment of the Pixy Camera. The Pixy Camera was a payload used to detect hazards by way of unique color identification techniques. On descent of the rocket, the camera was supposed to gather coordinates of blue tarps placed in the launch field. These coordinates could then be put into an equation along with the altimeter data for the height to obtain the actual coordinates of the tarp relative to the rocket. Sinch no deployment event occured, the camera was no deployed outside of the rocket, and therefore no data could be obtained from the camera. The second payload was a turbine used to harness voltage from airflow on ascent. As the rocket ascended, the outside air entered the interior of the rocket by way of scoops and directed air nozzles. The air nozzles directed the high velocity air onto the fins of a dc motor turbine that generated voltage. Because the rocket did ascend for about 3 seconds, some data was gathered from the turbine by way of a datalogging shield attached to an arduino uno. When the data was examined, it was found that within the 3 second ascent the turbine was able to log voltages up to 1.72 volts. The overall objective of the turbine was to log around 2 volts for at least half the time to apogee. As a team, we believe that if the rocket were to have flown correctly to an apogee of around 5,000 feet, the turbine would have been able to log at least 2 volts if not more for half the time to apogee. Another interesting event that happend with the turbine was due to the high wind speeds on the day of launch. After the rocket failed and landed on its side, the wind speeds were caught by the airscoops and produced voltage from the turbine. Analyzing the data from the SD card obtained from the data logger, voltages up to 2.63 volts were recorded from the high wind speeds alone. As a team, we see the turbine payload as a trumendous success, and hope that through further investigation and improvement the turbine generator on ascent could prove to be a very important and viable research tool for modern rocketry. IX. Scientific Value Each of these payloads provides a uniqueness to the rocket that provides added safety and improved recovery. When a launch vehicle descends back to the ground, it may be holding valuable material or data. Recovery of the launch vehicle is of the utmost importance to obtain the data that is logged on the rocket for analysis or the obtained luggage and to assess the launch vehicles condition. The recovery system relies heavily on the hazard detection system of the launch vehicle. If the vehicle were to land out of reach, such as on a mountain, recovery becomes difficult or impossible. Electronics on board the vehicle may be damaged by certain environments such as extreme heat or water, and should be guided away from these hazards to recover the data on board. The Pixy Camera will provide valuable feedback of the relative x and y coordinates of these hypothetical hazards by way of color recognition. An exact position of these hazards can be found by correlating its x and y data with the height (z) data from the altimeter. After flight, the data will be extracted from the Arduino Uno using a SD card shield that logs the data during flight. The x and y positions at different points in time from the Pixy Camera will then be loaded into Excel along with the height at different points in time from the altimeter. By using this equation, we will be able to find the exact positions of the hazards relative to the camera. 5 of 9 American Institute of Aeronautics and Astronautics This payload will provide a small challenge by using the data and equation to find the position of the hazards. The accuracy of the position will depend on the relative positions on the camera. As the camera moves closer towards the tarp, the tarp will appear larger on the screen. The Pixy Camera shows the position of the center of the object;therefore, if the tarp is close enough to the camera, then the camera will show a position of (0,0) because the tarp will take up the whole screen of the camera. Testing and accuracy of the camera will be accomplished by creating a unique color object and measuring the distance from the object to the camera. We will then use the above equation to test whether the data received from the Pixy Camera and Arduino are accurate and correct. After the data is received, we will then be able to provide a tolerance. At apogee, a drogue parachute must be deployed to slow the launch vehicle to a speed that is suitable for a main parachute deployment. Safety of the rocket, surrounding objects, and surrounding people depend on this drogue deployment. Usually these drogue deployments are powered by an on-board altimeter and 9v battery. If the battery or altimeter were to malfunction, a serious safety hazard will have been formed from the descending vehicle. The vehicle will accelerate and the main deployment may zipper the vehicle. If the main deployment fails due to this zippering, the vehicle will plummet to the ground at astounding speeds. The second payload of a turbine could theoretically provide a backup system for the drogue deployment. Based on the circuitry seen above, the turbine will be activated by the outside wind on ascent. This voltage created by the turbine will charge a capacitor. A switch will prevent the capacitor from discharging. The switch will be able to detect if the turbine is creating a voltage. If a voltage is being created, the switch will remain open. If there is no voltage being provided by the turbine, the switch will close and the capacitor will then discharge. Our hypothesis is that the turbine will cease to spin at apogee when there is little to no airflow through the chamber. At this time the capacitor will discharge the voltage and create a current from the resistor. This current will have to be large enough to theoretically power an e-match. Testing was performed prior to launch to provide feasibility for the payload. First we tested the current output of the Stratologger altimeter. Next we tested the turbine voltage output in a wind tunnel set to the speed of launch ascent given in OpenRocket. If the voltage is high enough, the turbine will be attached to the circuit and run in the wind tunnel. We will stop the wind from the wind tunnel after the time to apogee given in OpenRocket and measure the current provided by the capacitor discharge and resistor. If this current is close to the current measured by the altimeter, the turbine will be a feasible payload. Both payloads will present its own challenges and difficulty. As for the Pixy camera, maintaining a reasonable precision and accuracy will be rather difficult with elevation changes at ground level, barrel distortion effects of the camera, camera tilt, and the camera swing. The turbine will have to generate enough voltage to heat a small resistive wire hot enough to light an E-match. A reasonable voltage will have to be obtained within the time it takes the rocket to launch to apogee. These unique challenges and difficulties have caused the team to strive harder to reach the set goals and obtain success. 6 of 9 American Institute of Aeronautics and Astronautics X. Lessons Learned During this year’s USLI Competition, the University of South Alabama Launch Society learned several important things about working together as a team to reach a common goal. This primarily includes the fact that an individual’s work should be reviewed by at least one or two team members before the work is accepted and considered ready for flight. Had the USA Launch Society made a committment to reviewing each team member’s work, the motor malfunction would not have occurred, and the team would have been able to possibly achieve a successful flight. Furthermore, the team also learned the value of having a check-list for each sub-system and assembly of the rocket. Having a check-list ensures that certain important factors that go into the design and assembly of the rocket vehicle are not forgotten or misplaced. Through this, the team learned the essential value of organization. Another important lesson that the team learned is the importance of making correct measurements. A few times during the construction and assembly of the team’s vehicle, the team ran across problems such as a payload bay or 3D printed part not fitting properly as designed. By double-checking certain measurements, the team would have been able to be much more efficient by not having to fix mistakes caused by measurement errors. Overall, the team values these lessons learned, and plans to pass this learned information on to the students that will be competing in next year’s USLI Competition. XI. Overall Experience Traveling and participating in the NASA USLI Competition was a first time experience for every member on the team. This created uplifting excitement and expectations to take in all that we could during the week. The process to check in, find out the event functions for the week, and the inspection vehicles before launch day was very organized and in a convenient location for the team. It was of great help that the the inspections were right down the hall from the teams hotel room. The rocket fair was a great opportunity to expose the key features of our rocket along with connecting with others about team designs alike. Huntsville, Al is definitely a feasible location for the competition as there are so many tours that the team can take part in such as the Space & Rocket Center, Redstone Arsenal, and the Marshall Space Flight Center. For the team, it was very inspiring to see the history of NASA and the vision for the future of aerospace in that our current generation of students will help take part of what is yet to come in the journey to Mars. Launch day was the climax of the week as the team’s expectations to perform well was at its peak after preparing for a whole year. It was overall a great atmosphere to be in as teams all around are looking for the same success of their rocket. Everyone was very respectful and helpful in that they reached out to us if we were in need of tools or assistance. Unfortunately, the team did not see the full potential of Fancy that day due to the motor malfunction. However, the team took a lot of what happened that day with many lessons learned. Nonetheless, it was a good experience and the team has grown substantially from this competition. 7 of 9 American Institute of Aeronautics and Astronautics XII. Educational Engagement Currently, the team has attended two total outreach events to two different schools in Brewton, Alabama. From the two schools, T.R. Miller High School and W.S. Neal Elementary. Also, during Engineering Week (E-Week) at USA, the team was able to educationally engage 201 middle school students through fundamental rocketry presentations and lessons. Thus far, a total of 405 students have been outreached to. The team has been proactive in attending and preparing for each outreach event, and looks to continue its motivation for outreach. The team has also collaborated with the team’s high school intern, Kayla Bell, throughout the semester in order to plan an additional outreach event at the Alabama School of Math and Science. The team also plans to do an outreach event with the high school students of Faith Academy. For the outreach events, the team has purchased model rocket kits from a local hobby store, HobbyTown USA, that are able to sustain up to level D rocket motors. The team has demonstrated the different levels of impulse and the significant difference in the ascending levels. Figure 3: Andrew Tindell (left), Nghia Huynh (middle), and Conner Denton (right) teaching the students at W.S. Neal Elementary the fundamentals of rocketry. XIII. Budget Summary Displayed below is the teams budget summary towards the competition. The total project is at a low cost relative to other schools given the amount of funding that the team had. More than half the budget was towards the travel to launch sites while the other half was towards the fabrication of the team rocket itself. Of course, both are vital in the success of the competition but the team realized that there are only certain costs that can be controlled so the cost of the vehicle intentionally set to a minimum. This budget worked out well given that the team did not have to replace any major components of the rocket during any full scale or ground testing. 8 of 9 American Institute of Aeronautics and Astronautics Table 1: Total project budgeting. Total Project Cost Rocket Structure Payload Recovery Components Altimeter Bay Certifications Outreach Travel to Samson, AL Travel to Huntsville, AL Total Project Cost Price $569.95 $400 $321 $263 $520 $385 $900 $2200 $5558.95 9 of 9 American Institute of Aeronautics and Astronautics