Document 11217771
advertisement

J. Fluid Mech. (2012), vol. 693, pp. 216–242.
doi:10.1017/jfm.2011.515
c Cambridge University Press 2012
216
Experiments on the periodic oscillation of free
containers driven by liquid sloshing
Andrzej Herczyński1 and Patrick D. Weidman2 †
1 Department of Physics, Boston College, Chestnut Hill, MA 02467-3811, USA
2 Department of Mechanical Engineering, University of Colorado, Boulder, CO 80309-0427, USA
(Received 15 April 2011; revised 12 November 2011; accepted 16 November 2011;
first published online 6 January 2012)
Experiments on the time-periodic liquid sloshing-induced sideways motion of
containers are presented. The measurements are compared with finite-depth potential
theory developed from standard normal mode representations for rectangular boxes,
upright cylinders, wedges and cones of 90◦ apex angles, and cylindrical annuli. It
is assumed that the rectilinear horizontal motion of the containers is frictionless.
The study focuses on measurements of the horizontal oscillations of these containers
arising solely from the liquid waves excited within. While the wedge and cone exhibit
only one mode of oscillation, the boxes, cylinders and annuli have an infinite number
of modes. For the boxes, cylinders and one of the annuli, we have been able to excite
motion and record data for both the first and second modes of oscillation. Frequencies
ω were acquired as the average of three experimental determinations for every filling
of mass m in the dry containers of mass m0 . Measurements of the dimensionless
frequencies ω/ωR over a range of dimensionless liquid masses M = m/m0 are found
to be in essential agreement with theoretical predictions. The frequencies ωR used for
normalization arise naturally in the mathematical analysis, different for each geometry
considered. Free surface waveforms for a box, a cylinder, the wedge and the cone are
compared at a fixed value of M.
Key words: surface gravity waves, wave-structure interactions
1. Introduction
The hydrodynamic coupling of liquid sloshing in containers moving in some
constrained manner has been the subject of scientific investigation for more than
seven decades. Much of the original work was concerned with the effect of liquid
propellant sloshing on the stability of ballistics and space vehicles in the 1960s (see
Moiseev 1964; Abramson 1966). Other studies have dealt with disturbances of trucks
or ships transporting large partially filled liquid containers to external forcings induced
by a corrugated road on a moving truck or by periodic surface waves on a moving
ship – see Dodge (2000), Ibrahim (2005) and Faltinsen & Timokha (2009) for an
extensive summary of these parametrically forced liquid transport problems.
The motion of a partially filled container supported as a bifilar pendulum is distinct
from containers supported as a classic pendulum as studied by Moiseev (1953) and
† Email address for correspondence: weidman@colorado.edu
Periodic oscillation of free containers driven by liquid sloshing
217
Abramson, Chu & Ransleben (1961). For small excursions of the pendulum from
vertical, containers partially filled with liquid suspended as a bifilar pendulum execute
nearly horizontal motion with negligible vertical deflection. This problem, studied
analytically and experimentally by Cooker (1994) in the shallow-water limit, has
recently generated attention on both sides of the Atlantic. Cooker (1996) provided
a model for the dissipation of bores travelling along a suspended cylinder observed
when the cylinder was released with moderate horizontal extension from its rest
position. Weidman (1994, 2005) extended Cooker’s theory to multi-compartment
rectangular boxes and right circular cylinders suspended as bifilar pendula; he also
obtained considerable experimental data at different pendulum lengths and different
liquid fillings for those geometries. Recently, Ardakani & Bridges (2010) provided
an alternative derivation and a Lagrangian representation of Cooker’s problem, still
in the shallow-water limit. Yu (2010) reported finite-depth potential theory for
Cooker’s problem, for box and cylinder geometries, with two aims: (i) to eliminate
the shallow-water restriction, which assumes the pressure acting on the sidewalls is
hydrostatic; and (ii) to display explicitly the effect of evanescent waves in the system.
Moreover, Yu (2010), having taken an interest in our experiments on freely moving
containers driven by liquid sloshing (Herczynski & Weidman 2009), also provided the
finite-depth infinite-pendulum-length limit eigenvalue equations for both the box and
cylinder configurations.
In the present investigation we are interested in measuring the motion of a rigid
container, free to move horizontally without friction and subject only to pressure
forces of the liquid sloshing inside. Motions of the container and the liquid are
coupled and resonate at the same frequency. Their relative amplitudes, however, as
will be shown, depend on the container geometry and the amount of liquid carried
by the vessel. The problem may be regarded as a limiting case of motion of a vessel
suspended as a bifilar pendulum, where the length of the support wires becomes
infinite. The physics of the sloshing pendulum, however, is substantially different from
that of a free container. In the free-sloshing case, gravity does not directly affect the
motion of the container, but only indirectly: the hydrodynamic pressure of the liquid
on its walls provides the only restoring force. The sloshing liquid must therefore be
out of phase with the oscillating vessel, accumulating always in the direction opposite
to that of the container’s motion. In the case of a container suspended as a bifilar
pendulum, gravity provides the restoring force directly, working in concert with or in
opposition to the hydrodynamic force, so that both in-phase and anti-phase oscillations
can occur (cf. Cooker 1994; Yu 2010). Note that the amplitude of the fundamental, inphase mode of oscillations for the suspended container must vanish as the suspension
length tends to infinity and, consequently, the next anti-phase mode takes on the role
of the fundamental in that limit; see the discussion in Yu (2010).
Our presentation begins with the problem formulation in § 2, followed by finitedepth potential theory solutions for the various geometries in § 3. The experimental
measurements given in § 4 are compared with theory, and the paper ends with a
discussion and concluding remarks in § 5.
2. Problem formulation
Consider a container of mass m0 partially filled with liquid of mass m free to
move in frictionless horizontal motion. If X(t) denotes the horizontal position of the
container in the stationary laboratory reference frame, then Newton’s second law for
218
A. Herczyński and P. D. Weidman
the container takes the form
where
m0 Ẍ = Fp ,
Fp =
Z
(2.1)
p(n · i) dS
(2.2)
S
is the X-component of the pressure force acting on the container walls. Here p is
the hydrodynamic pressure acting over the wetted surface S of the container, n is the
unit normal to S pointing out of the fluid domain and i is the unit vector directed
along the X-axis. Surface tension is neglected, though capillary effects could easily be
included in the calculation of the sloshing waveforms. It is convenient to calculate the
pressure, velocity potential φ and free surface displacement ζ in a coordinate system
(x, y, z) attached to the container, with z pointing upwards and z = 0 the position of the
quiescent free surface. Linearized potential motion is assumed so that the pressure in
the frame of reference moving with the container is given by
p = −ρ(φt + gz + xẌ).
(2.3)
∇ 2φ = 0
(in D ),
(2.4a)
φt + gζ + xẌ = 0 (z = 0),
φz = ζt (z = 0),
n · ∇φ = 0 (on S),
(2.4b)
(2.4c)
(2.4d)
Here ρ is the liquid density, g is gravity and −ρxẌ is the body force due to the
acceleration of the container.
The velocity potential, pressure and free surface displacement are determined from
the solution of the linearized potential flow boundary-value problem:
in which D is the domain of the quiescent liquid. For future reference we note that
ζ (x, t) may be eliminated from (2.4b,c), yielding the combined kinematic and dynamic
free surface condition
...
(2.5)
φtt + gφz + x X = 0 (z = 0).
We are interested in container shapes amenable to analytic solution, which usually
require some form of symmetry about the vertical axis or plane. Considered below are
rectangular geometries, upright cylinders, cones and wedges with 90◦ apex angles, and
cylindrical annuli. Experiments show that complicated rectilinear motions can arise
depending on how the system is put into motion. With some practice, we have learned
how to manually excite the containers to yield damped periodic motion with little drift.
With ‘improper’ excitation, the container was observed to oscillate while translating.
Although these latter cases are certainly interesting from a dynamical systems point of
view, we analyse here only periodic motions of the simplest form
X(t) = X0 cos ωt.
(2.6)
The important dimensionless parameter for this study is the ratio of liquid mass m to
dry container mass m0 , denoted by
M=
m
.
m0
(2.7)
Periodic oscillation of free containers driven by liquid sloshing
219
The goal is to calculate the dimensionless finite-depth frequency of periodic motion
ω/ωR as a function of M and compare with laboratory experiments. Natural choices
for the reference frequency ωR will avail themselves for each geometry considered.
The theoretical results, presented here for comparison with experiment, are simply
an implementation of well-known linear modal methods. The theory is essential,
however, for distinguishing between the shallow-water and deep-water limits of the
finite-depth theory. The adopted classical modal method inherently includes the effect
of evanescent waves but does not explicitly separate out their contribution to the
composite travelling and evanescent wave solution as in Yu (2010). While our
solutions can be cast in a more compact form compared to those presented in Yu
(2010), this is at the expense of slower convergence of the series expressions obtained.
Nevertheless, there is no hindrance for determining accurate solutions with the aid of
Mathematica (Wolfram 1991).
A comment about a resonance for suspended containers reported by Cooker (1994)
is in order. Based on his linear model, Cooker shows that, for a rectangular container
of length L = 2D and width W filled with liquid to depth H, the governing shallowwater equation will be secular when the length of the pendulum satisfies the relation
(1 + M)D2
(n > 2).
(2.8)
n 2 π2 H
Yu (2010) contends that this is not a resonance because ‘the mathematical formulation
does not include a mechanism for continued energy input to the system’. Indeed, there
is no external forcing of the system independent of the hydrodynamic motion and
so there is no mechanism for energy input. While the pressure force due to sloshing
can, like gravity, provide a restoring force allowing for the possibility of the resonant
condition within Cooker’s linear model, the system’s behaviour when condition (2.8) is
satisfied has yet to be elucidated mathematically or observed experimentally. However,
since the two mechanisms are coupled, suspended containers are not expected to
exhibit exponential growth of oscillation amplitude. The point to stress is that, for
containers moving freely in the horizontal, as considered here, there is only the
restoring force of the sloshing liquid, and no other body force to provide resonance.
This is clear from the solutions provided in the sequel.
l=
3. Analytical solutions
3.1. Rectangular containers
3.1.1. Finite-depth solution
Consider a rectangular box of length L = 2D, width W and mass m0 filled to
depth H with liquid of density ρ. The origin for x is located midway between the
endwalls. A modal solution of (2.4a) satisfying the impermeability condition (2.4d) on
the vertical walls at x = ±D and on the horizontal bed at z = −H is given by
φ(x, z, t) =
∞
X
An
n=1
cosh kn (z + H)
sin kn x sin ωt,
cosh kn H
(3.1)
where kn = (2n − 1)π/2D and An are coefficients to be determined. Inspection of (2.5)
and (3.1) shows that the coordinate x should be expanded in the Fourier sine series
x=
∞
X
2 (−1)n+1
n=1
kn2 D
sin kn x.
(3.2)
220
A. Herczyński and P. D. Weidman
Inserting (3.1) and (3.2) into (2.5) then furnishes the coefficients
An = −
2 (−1)n+1 X0 ω3
.
kn2 D (gkn tanh kn H − ω2 )
(3.3)
Having determined φ(x, z, t) and using X(t) in (2.6), we apply (2.4b) to obtain the free
surface displacement,
!
∞
X
1
2
ζ (x, t) =
xX0 ω − ω
An sin kn x cos ωt.
(3.4)
g
n=1
The eigenvalue equation for the oscillation frequency ω is obtained from (2.1), which
requires computation of the sideways pressure force (2.2) wherein p calculated from
(2.3) is given by
" ∞
#
X cosh kn (z + H)
p(x, z, t) = −ρ ω
An
sin kn x + gz − ω2 X0 x cos ωt.
(3.5)
cosh
k
H
n
n=1
The contributions to (2.2) at the left wall x = −D for which n = −i and at the right
wall x = D for which n = i give the resultant sideways hydrodynamic force
"
#
∞
X
n+1
2
4
Fp = 2ρW DHX0 ω − ω
(−1) An tanh kn H cos ωt.
(3.6)
n=1
We note here, and in the sequel, that the hydrostatic pressure component −ρgz gives
zero net sideways force. Inserting (3.6) into (2.1) yields, on simplification,
#
"
∞
X
tanh
k
H
n
.
(3.7)
− m0 = 2ρDWH 1 + 2ω2
2
(k
H)
(k
D)
(gk
tanh
kn H − ω2 )
n
n
n
n=1
Since the mass of liquid in the container is m = 2ρDWH, we introduce the mass ratio
from (2.7) to obtain the desired result
!
∞
X
tanh kn H
2
1 + M 1 + 2ω
= 0.
(3.8)
(kn H) (kn D)2 (gkn tanh kn H − ω2 )
n=1
This is the finite-depth eigenvalue equation for ω to be determined at each value of
M for given box dimensions. Solutions with waveforms antisymmetric about x = 0
appear with increasing frequency: these will be denoted as successive modes for the
sloshing-induced motion of the container. The effect of box width W appears implicitly
through M. In solving the equation it must be remembered that H = H(M). Equation
(3.8) includes the effect of evanescent waves.
The eigenvalue equation (3.8) can also be obtained using the formalism proposed
by Faltinsen & Timokha (2009) developed for applications to ships carrying liquid
loads in their hulls (their equations (5.70), (5.72) and (5.73)). In that approach, the
governing equations of motion are written in tensorial form, equivalent to Newton’s
second law in both translational and rotational forms, wherein the net mass is given as
the sum of the vessel’s mass and the frequency-dependent ‘added mass’ including the
hydrodynamic effect of sloshing. However, for our one-dimensional problem – without
roll, pitch, yaw, sway and heave motions of the container – the direct derivation
presented here, for all shapes considered, is simpler and more intuitive.
Periodic oscillation of free containers driven by liquid sloshing
221
3.1.2. Shallow- and deep-water limits
The long-wave limit kn H → 0 gives the shallow-water behaviour for the box. In this
case we make the approximation tanh kn H ∼ kn H in (3.8) and insert the definition for
H = H(M) to obtain
!
∞
X
Z2
1+M 1+2
= 0,
(3.9a)
2 (α 2 − Z 2 )
α
n
n
n=1
where αn = (2n − 1)π/2 and
1
Z = 1/2
M
ω
ωR
,
ωR =
r
m0 g
.
2ρD3 W
Using partial fractions and summing the independent terms we find
∞ ∞
X
X
1
tan Z 1
Z2
1
=
− 2 =
− .
2 (α 2 − Z 2 )
2 − Z2
α
α
α
2Z
2
n
n
n
n
n=1
n=1
(3.9b)
(3.10)
Inserting this into (3.9a) yields the shallow-water eigenvalue equation
Z + M tan Z = 0.
(3.11)
The reference frequency ωR provides the natural non-dimensionalization for oscillation
frequency ω, since boxes of dimensions L = 2D and W with dry masses m0 must all
exhibit the same ω/ωR behaviour in the shallow-water limit.
The deep-water frequencies are found by the simple expedient of setting tanh kn H =
1 in the numerator and denominator of (3.8). This yields
2
1 + M + 2σ β
2
∞
X
1
1
= 0,
3
αn (αn − β 2 )
σ2 =
2ρD2 W
,
m0
(3.12)
√
where β = ω/ω0 and ω0 = g/D. Summing this series with the aid of Mathematica
we obtain the implicit solution for the deep-water behaviour,
1 β2
1
1
2
4 (2)
3 2
2
+ 2π ψ
−
−β ψ
π β − 2π ψ
2
2
π
2
− 1, (3.13)
M = σ2
π3 β 4
where ψ(z) and ψ (2) (z) are the digamma and tetragamma functions defined in
Abramowitz & Stegun (1972).
3.1.3. Sample solutions
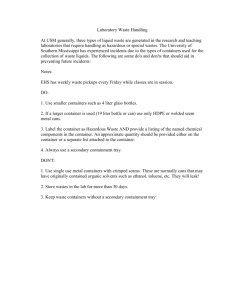
Solution curves obtained from the finite-depth result along with the limiting shallowand deep-water representations for two box geometries are shown in figure 1. For
the box, cylinder and annular geometries, we tested convergence with respect to the
number of spatial modes and found that including more than 10 modes produced
no change in results to three or four decimal places; for insurance on numerical
accuracy we used 15 modes in all our calculations using Mathematica. For this box
example we take the nominal values ρ = 1.0 g cm−3 and g = 1000 cm s−2 . The box
of square planform has L = W = 20 cm, m0 = 1000 g with shallow-water reference
frequency ωR = 5.0 rad s−1 , while the box of rectangular planform has L = 40 cm,
W = 20 cm and m0 = 2000 g for which ωR = 2.5 rad s−1 . The dashed line at low M
222
A. Herczyński and P. D. Weidman
5
Rectangular box
4
3
Square box
2
1
0
2
4
6
8
10
M
F IGURE 1. Normalized oscillation frequencies for two box geometries computed from (3.8):
a box of square planform (L = 20 cm, W = 20 cm, m0 = 1000 g) and a box of rectangular
planform (L = 40 cm, W = 20 cm, m0 = 2000 g). The dashed lines exhibit the common
shallow-water asymptotes at small M computed from (3.11) and the distinct deep-water
asymptotes at high M computed from (3.13) with tanh kn H = 1. The shallow-water reference
frequencies for the square and rectangular boxes computed from (3.9b) are ωR = 5.0 rad s−1
and ωR = 2.5 rad s−1 , respectively.
is the common shallow-water limit given as solution of (3.11) and the two dashed
lines at high M are the deep-water behaviours computed from (3.13). Note that both
response curves exhibit a value of M at which the frequency is maximum, and
this feature is more evident for the square box. For the square box, the maximum
ω/ωR = 3.031 47 occurs at M = 3.84 and this corresponds to a dimensional frequency
maximum ω = 15.16 rad s−1 . For the rectangular box, the maximum ω/ωR = 4.458 84
occurs at M = 6.65 and this corresponds to a dimensional frequency maximum
ω = 11.15 rad s−1 , smaller than that for the square box. Note that both frequency
curves merge smoothly to the same shallow-water limit even though the two boxes
have different masses and dimensions.
3.2. Cylindrical containers
3.2.1. Finite-depth solution
Now consider a circular cylinder of radius R and dry mass m0 filled with liquid to
depth H. Cylindrical coordinates (r, θ, z) in the moving frame are now incorporated
and the linearized problem is still that given by (2.4) but with x replaced by r cos θ .
A finite-depth solution form for the velocity potential satisfying Laplace’s equation
(2.4a) and the impermeability condition (2.4d) on the vertical wall at r = R and on the
horizontal bed at z = −H is given by
φ(r, θ, z, t) =
∞
X
n=1
An J1 (kn r)
cosh kn (z + H)
cos θ sin ωt,
cosh kn H
(3.14)
where J01 (kn R) = 0 fixes the radial wavenumbers kn and J1 is the Bessel function of the
first kind. Expanding r in the Fourier–Bessel series
r=
∞
X
n=1
2kn R2 J2 (kn R)
J1 (kn r),
(kn2 R2 − 1) J21 (kn R)
(3.15)
Periodic oscillation of free containers driven by liquid sloshing
223
and inserting this expression and (3.14) into (2.5) determines the coefficients as
An = −
2αn Rω3 X0
J2 (αn )
,
2
2
(αn − 1)J1 (αn ) (gkn tanh kn H − ω2 )
where αn = kn R. The free surface displacement determined from (2.4b) is
"
#
∞
X
1
2
ω X0 r − ω
An J1 (kn r) cos θ cos ωt.
ζ (r, θ, t) =
g
n=1
(3.16)
(3.17)
For calculation of the sideways pressure force, the outward normal to the vertical
sidewall is n = er , where er is the radial unit vector. Since er · i = cos θ, the expression
for the pressure force in (2.2) in the cylindrical geometry is
Z 2π Z 0
Fp =
p(R, θ, z, t) cos θ R dθ dz.
(3.18)
0
−H
Using (2.6) and (3.18), the linearized pressure (2.3) evaluated at the cylindrical wall is
"∞
#
X
cosh kn (z + H)
p(R, θ, z, t) = −ρ
An ωJ1 (kn R)
+ gz − Rω2 X0 cos θ cos ωt, (3.19)
cosh
k
H
n
n=1
and carrying out the integral in (3.18) gives
#
"
∞
X
ω
J
(α
)
tanh
k
H
1
n
n
cos ωt.
Fp = ρπR Rω2 HX0 −
An
kn
n=1
(3.20)
Inserting (3.20) into the equation of motion (2.1) yields, on simplification and
identifying m = ρπR2 H as the fluid mass, the finite-depth eigenvalue equation
!
∞
X
J2 (αn )
tanh kn H
2R
1 + M 1 + 2ω
= 0,
(3.21)
H n=1 (αn2 − 1)J1 (αn ) (gkn tanh kn H − ω2 )
where again it must be kept in mind that H = H(M). As in the case of the rectangular
container, eigenvalue equation (3.21) for the cylinder can, alternatively, be derived
using the ‘added mass coefficients’ in the method of Faltinsen & Timokha (2009).
3.2.2. Shallow- and deep-water limits
The shallow-water limit is obtained from (3.21) by replacing tanh kn H with kn H and
incorporating the definition for H = H(M). This yields
!
∞
X
αn J2 (αn )
Z2
1+M 1+2
= 0,
(3.22a)
(αn2 − 1)J1 (αn ) (αn2 − Z 2 )
n=1
where J01 (αn ) = 0 and
1
Z = 1/2
M
ω
ωR
,
ωR =
r
m0 g
.
2ρπR4
(3.22b)
Though we did not analytically sum this series, we find that the term in parentheses
in (3.22a) is numerically equal to J1 (Z)/ZJ01 (Z). Inserting this into (3.22a) we find the
shallow-water eigenvalue equation for the cylinder
ZJ01 (Z) + MJ1 (Z) = 0.
(3.23)
224
A. Herczyński and P. D. Weidman
This is in agreement with the infinite-pendulum-length limit Ω → 0 of equation (35)
in Yu (2010).
As with the rectangular box, the deep-water eigenvalue equation for the cylinder is
obtained by replacing tanh kn H in (3.21) with unity. We do not attempt to sum the
resultant series for this case, but simply compute the deep-water behaviour using the
deep-water series representation.
3.3. Wedge geometry
Cooker (1994) presented a potential theory solution for a suspended planar hyperbolic
container. The asymptotes of these hyperbolae form a wedge with apex angle β = π/2.
The streamlines for this geometry coincide with those depicted by Lamb (1932,
§ 258). For this limiting geometry, Cooker presented a formula for the frequency
of suspended container motion that exhibits two frequencies, the lower (higher) of
which corresponds to wave oscillations in phase (anti-phase) with the motion of the
oscillating tank. Anxious to confirm his result, one of the present authors (P.D.W.)
performed several experiments at different pendulum lengths, only to find that the
theory consistently over-predicted the experimental measurements for all values of M.
Communication with Cooker led to a correction of the theory (M. J. Cooker, 2009,
personal communication) for this case, wherein application of the hydrostatic pressure
at the sidewalls is replaced by the potential pressure as given in (2.3). The revised
theory then gave predicted frequencies in accord with the experiments. In hindsight, it
is clear that all frequencies for the motion of the wedge with π/2 apex angle must be
governed by just one formulation because the streamlines for each liquid mass placed
in the wedge are self-similar: for the 90◦ wedge studied here the formulation must be
finite-depth potential theory. It is possible that the motion in suspended wedges with
much larger apex angles π/2 β < π will be adequately described by shallow-water
theory, but no antisymmetric solutions are known for values of β > π/2. A case in
point is a wedge with included angle β = 2π/3, for which only symmetric waveform
solutions are known (see Haberman, Jarski & John 1974). Nevertheless, accurate
estimates of the sloshing frequencies for wedges of any angle β < π may be found
using conformal transformation techniques (see Davis & Weidman 2000).
The following result for the frequency of free motion of the π/2 wedge coincides
with the infinite-pendulum-length limit of the corrected theory due to M. J. Cooker,
2009 (personal communication) mentioned above. Consider a wedge of mass m0 ,
width W and apex angle bisected by the vertical axis aligned with gravity. In the
moving reference frame with z = 0 located at the mid-point of the quiescent liquid
surface, the wetted container shape z = −h(x) is given by
h(x) = H + x
(−H 6 x 6 0),
h(x) = H − x
(0 6 x 6 H).
(3.24)
Posited solution forms for φ satisfying Laplace’s equation (2.4a) and free surface
displacement ζ satisfying (2.4c) are given by
φ(x, z, t) = −
ζ0
ωxz sin ωt + C(t)x,
H
(3.25a)
ζ0
x cos ωt,
(3.25b)
H
where C(t) is an arbitrary function. It is clear from (3.25b) that the posited solution
represents a periodically oscillating free surface that is always planar. Inserting (3.25a)
ζ (x, t) =
Periodic oscillation of free containers driven by liquid sloshing
225
into free surface condition (2.5) yields, upon integration,
C(t) = −
gζ0
sin ωt − Ẋ + at + b,
ωH
(3.26)
where a and b are constants. For the assumed periodic motion (2.6), we can take
a = b = 0 without loss of generality. Computing Ẋ using (2.6) and inserting (3.26) into
(3.25a) gives the potential function
gζ0
ζ0 ω
φ(x, z, t) = x X0 ω −
−
z sin ωt.
(3.27)
ωH
H
The outward normals to the left and right walls are
(i + k)
n=− √
2
(−H 6 x 6 0),
n=
(i − k)
√
2
(0 6 x 6 H),
(3.28)
where i and k are unit vectors aligned with the x- and z-coordinates, respectively. The
impermeability condition (2.4d) then yields
ζ0
1
.
=
(3.29)
g
X0
−
1
ω2 H
We refer to ζ0 /X0 as the amplification ratio: for a given sideways amplitude X0 of the
wedge, a maximum deflection ζ0 of the liquid in the container is realized.
Using (2.6) and (3.27), the pressure
ζ0
2
p(x, z, t) = ρ
(g + ω z)x cos ωt − gz
(3.30)
H
is obtained from (2.3). Note that the terms proportional to the amplitude X0 of
sideways motion cancel, but the pressure still depends on X0 through the amplification
ratio (3.29). Again, the hydrostatic contribution to (2.2) is zero and the remaining
terms give the sideways component of the pressure force,
1
g
− ω2 ζ0 cos ωt.
Fp = ρWH 2
(3.31)
H 3
Inserting (3.31) into the governing equation of motion (2.1) yields
2
ω
g
2
2
ω m0 X0 = ρWH
−
ζ0 .
3
H
(3.32)
Since the wedge carries fluid mass m = ρWH 2 , a second expression for the
magnification ratio
ζ0
1
1
=
g
X0 M 1
−
3 ω2 H
(3.33)
226
A. Herczyński and P. D. Weidman
is obtained. Equating (3.29) and (3.33) gives
ω2 =
We eliminate H using H =
√
g 1+M
.
M
H
1+
3
m0 M/ρW to arrive at the exact solution
v
2 1/4
1 u
ρg W
ω
1+M
u
= 1/4 t
, ωR =
M
ωR M
m0
1+
3
(3.34)
(3.35)
for the sloshing-induced oscillation frequency of the free wedge. It is pertinent to
observe that this ωR is not a shallow-water reference frequency, for there is no shallowwater limit for this wedge geometry; the solution for all M is a finite-depth solution.
Note that the singular behaviour in (3.29) appears only when the containers are
empty so that no sloshing-induced motion can occur, namely when ω2 = g/H, which
means, according to (3.34), that M = 0. Equation (3.33) is never singular except at
M = 0, since the case ω2 = 3g/H is excluded by (3.34).
3.4. Cone geometry
Now we consider a cone of mass m0 and apex angle π/2. Cylindrical coordinates
(r, θ, z) in the moving reference frame are used with the conical z-axis antiparallel to
gravity. The analysis follows closely that for the 90◦ wedge. We find that the potential
function and the free surface displacement are given by the wedge solutions (3.27) and
(3.25b) with x replaced by r cos θ. As with the 90◦ wedge, the free surface is always
flat. The wetted surface of the cone is given by z = −h(r), where h(r) and the outward
normal to the surface n are given by
h(r) = H − r,
n=
(er − ez )
√
,
2
(3.36)
in which er and ez are unit vectors pointing along positive r and z, respectively.
Imposition of the impermeability condition (2.4d) on the conical wall yields a
magnification ratio identical to (3.29). The linearized pressure field is identical to
(3.30), when x is replaced by r cos θ . Evaluating this pressure on the boundary h(r),
inserting it into (2.2) and performing the integration yields a sideways force different
from that for a wedge, viz.
ω2 g
3
2
Fp = πρζ0 H
−ω +
cos ωt.
(3.37)
3H
4
Inserting this into (2.1), and identifying the fluid mass in the cone as m = ρπH 3 /3, we
arrive at an expression for the magnification ratio for the cone:
ζ0
1
1
=
.
g
X0 M 1
−
4 ω2 H
(3.38)
Periodic oscillation of free containers driven by liquid sloshing
227
Equating (3.29) and (3.38) and eliminating H in favour of M furnishes the exact
solution
v
1/6
ω
ρπg3
1+M
1 u
u
, ωR =
=
(3.39)
t
M
ωR M 1/6
3m0
1+
4
for the oscillation frequency of the freely moving cone with apex angle π/2 radians.
The similarity with the wedge solution given in (3.35) is apparent.
3.5. Annular containers
We now consider the annular region between two vertical right concentric circular
cylinders. The original work on this problem dates back to Sano (1913), who studied
the seiching motion observed in a circular lake with central circular island (see also,
Campbell 1953; Bauer 1960). The annulus of inner radius R1 , outer radius R2 and dry
mass m0 is filled with liquid to depth H. We denote η = R1 /R2 as the radius ratio. As
with the cylinder, we use (r, θ, z) for the coordinate system attached to the sidewaysmoving container and align the z-coordinate with the axis of the concentric cylinders.
It is clear that any description of the free surface deflection for sloshing between the
cylinders must include higher-order azimuthal (e.g. cos nθ ) terms, particularly in the
narrow gap limit – the free surface cannot slosh back and forth in vertical planes as
it does in the fundamental sloshing mode of a cylinder with a single nodal diameter.
Nevertheless, one can compute the liquid–structure interaction for purely rectilinear
motion of the annulus owing to the orthogonality of trigonometric functions. We thus
proceed to determine the frequency of motion of the system by retaining only the
lowest azimuthal dependence, cos θ, realizing that computation of the time-dependent
free surface will not be available at this level of analysis. A finite-depth solution
form for the velocity potential that satisfies Laplace’s equation and the impermeability
condition on the bottom boundary is given by
φ(r, θ, z, t) =
∞
X
n=1
[Cn J1 (kn r) + Dn Y1 (kn r)]
cosh kn (z + H)
cos θ sin ωt,
cosh kn H
(3.40)
where J1 and Y1 are Bessel functions of the first and second kind. Satisfying
the impermeability condition on the inner and outer walls gives two homogeneous
equations for Cn and Dn , the determinant of coefficients of which provides the
eigenvalue equation for the radial wavenumbers kn , namely
J01 (kn R1 )Y01 (kn R2 ) − J01 (kn R2 )Y01 (kn R1 ) = 0.
(3.41)
Thus the potential (3.40) may be written in the form
φ(r, θ, z, t) =
∞
X
An P(r)
n=1
cosh kn (z + H)
cos θ sin ωt,
cosh kn H
(3.42a)
where
P(r) = Y01 (kn R1 )J1 (kn r) − J01 (kn R1 )Y1 (kn r).
(3.42b)
We now expand r in the Fourier–Bessel series,
r=
∞
X
n=1
Bn P(r),
(3.43)
228
A. Herczyński and P. D. Weidman
which, after a lengthy but straightforward calculation, gives
Bn =
2kn R21 {Y01 (kn R1 )[J2 (kn R2 ) − η2 J2 (kn R1 )] − J01 (kn R1 )[Y2 (kn R2 ) − η2 Y2 (kn R1 )]}
.
η2 {P2 (kn R2 )[(kn R2 )2 −1] − P2 (kn R1 )[(kn R1 )2 −1]}
(3.44)
Inserting (3.42) and (3.43) into the combined free surface condition (2.5) determines
the coefficients
An = −
ω3 X0
Bn .
(gkn tanh kn H − ω2 )
(3.45)
For calculation of the sideways pressure force, the outward normal to the inner
sidewall is ni = −er and that to the outer wall is no = er , where er is the unit vector
along r. Thus ni · i = − cos θ and no · i = cos θ , yielding the following expression for
the resultant sideways hydrodynamic force on the annulus:
Z 2π Z 0
Fp =
(3.46)
[p(R2 , θ, z, t)R2 − p(R1 , θ, z, t)R1 ] cos θ dθ dz.
0
−H
The linearized pressure is
#
"∞
X
cosh kn (z + H)
2
p(r, θ, z, t) = −ρ
+ gz − rω X0 cos θ cos ωt. (3.47)
An ωP(r)
cosh kn H
n=1
Evaluation of (3.46) gives
"
#
∞
X
(1 − η2 ) 2
tanh
k
H
n
Fp = ρπR1 X0 R1 H
cos ωt, (3.48)
ω −ω
An [η−1 P(R2 ) − P(R1 )]
η2
kn
n=1
and insertion into Newton’s equation of motion (2.1) using (2.6) yields
"
(1 − η2 )
−m0 ω2 = ρπR1 ω2 HR1
η2
∞
X
#
tanh kn H
.
+ω
[η P(R2 ) − P(R1 )]Bn
(gkn tanh kn H − ω2 )
n=1
4
−1
(3.49)
The fluid mass in the annular domain is m = ρπR21 H(1 − η2 )/η2 so using (2.7) we
obtain the desired eigenvalue equation for the frequency of tank motion as
!
∞
ω2 η X Bn
tanh kn H
1+M 1+
[P(R2 ) − ηP(R1 )]
= 0, (3.50)
(1 − η2 ) n=1 kn R1 H
(gkn tanh kn H − ω2 )
where the coefficients Bn are given in (3.44). A long, tedious calculation in the limit
R1 → 0 shows that this result reduces to eigenvalue equation (3.21) for a cylinder, as
expected.
3.5.1. Sample solutions
There now arises the manner in which we normalize the frequencies computed. We
have not determined the shallow-water behaviour for the annulus, and since it probably
depends on the radius ratio η, we choose to normalize all frequencies with the shallowwater value ωR for a cylinder of radius R2 with a dry container of mass m0 . To exhibit
Periodic oscillation of free containers driven by liquid sloshing
229
6
0.2
5
0.4
0.6
0.8
4
3
2
1
0
1
2
3
4
5
6
M
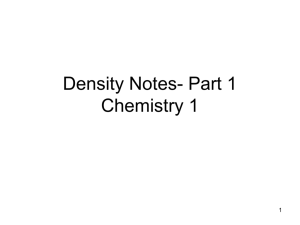
F IGURE 2. Normalized oscillation frequencies computed from (3.50) for selected radius
ratios of an annulus (R2 = 20.0 cm, R1 = 0, 4.0, 8.0, 12.0, 16.0 cm, and m0 = 2000 g). The
shallow-water reference frequency computed from (3.22b) is ωR = 1.995 rad s−1 .
η
M
0.2
0.4
0.6
0.700
3.56
5.16
ω (rad s−1 )
4.086
3.800
1.740
TABLE 1. Crossing points of the η = 0.8 frequency curve with those at η = 0.2, 0.4, 0.6
for the annulus calculations displayed in figure 2.
sample results, we choose annuli with radius ratios η = 0, 0.2, 0.4, 0.6, 0.8, each
with identical dry masses m0 = 2000 g. The selected radius is R2 = 20 cm, which
gives R1 = 0, 4.0, 8.0, 12.0, 16.0 cm. As with the sample box calculations given in
figure 1, we choose the nominal values ρ = 1.0 g cm−3 and g = 1000 cm s−2 , which
give ωR = 1.9947 rad s−1 computed from (3.22b) for a cylinder (η = 0). The results
displayed in figure 2 are somewhat surprising. None of the curves at low η cross any
other up to η = 0.6, but the curve for η = 0.8 crosses those for η = 0.2, 0.4, 0.6
twice, yet it does not cross the frequency curve for the cylinder at η = 0. The upper
crossing points are listed in table 1. A more detailed investigation shows that, as η
decreases from η = 0.8, the two crossing points move towards each other to form a
single point of tangency. Our estimate is that the point of tangency occurs at η ' 0.56
when M ' 1.6. Thus the crossing phenomena exist only for η > 0.56. For η very small,
the bulk of the fluid sloshes back and forth in vertical planes, but as η increases, large
azimuthal excursions of the fluid around the inner cylinder take place. The critical
crossing point at η ' 0.56 evidently heralds this transition in sloshing behaviour.
4. Experiments
Initial experiments for the cylindrical geometry were carried out by P.D.W. using
both flat and V-shaped air-bearing tables available at the University of Colorado. The
frequencies obtained at one liquid filling measured using a stopwatch were found to be
230
A. Herczyński and P. D. Weidman
L (cm) W (cm) Hb (cm) R (cm) R1 (cm) R2 (cm) m0 (g) %Mloss
Large box
Tall box
Large cylinder
Tall cylinder
Wedge
Cone
Annulus
(η = 0.364)
Annulus
(η = 0.777)
24.74
14.67
—
—
—
—
—
8.255
9.59
—
—
24.75
—
—
7.5
14.7
7.5
17.6
12.3
10.5
7.5
—
—
13.02
7.335
—
—
—
—
—
—
—
—
—
4.73
—
—
—
—
—
—
12.98
886.5
922.4
1129
1086
1138
1228
1207
0.76
0.33
0.76
0.27
0.82
1.48
0.76
—
—
15.2
—
10.113
13.013
1644
0.32
TABLE 2. Container dimensions, dry masses m0 and maximum percentage change in M
due to evaporation.
10–15 % lower than those predicted by finite-depth theory. Seubert & Schaub (2010)
have shown that air-bearing tables do not provide frictionless motion of the container
owing to the fact that the container moves back and forth into the air stream. Seubert
& Schaub (2010) have realized nearly frictionless motion by incorporating a feedback
control that permits air support only from holes directly beneath the container, cutting
off pressure to all other holes. However, a much simpler apparatus available at Boston
College proved entirely adequate.
The experimental set-up consisted of a low-friction cart and a 1.2 m long aluminium
track commercially available from PASCO (specializing in physics apparatus for
teaching laboratories). The cart has a mass of ∼0.5 kg and is outfitted with four
knife-edge wheels rotating freely on high-quality ball bearings, which are attached
to the chassis via a suspension system with springs above each wheel. The cart’s
wheels fit snugly into two parallel grooves along the track, which could be accurately
levelled using four adjustment screws to assure one-dimensional, horizontal motion
with minimal mechanical resistance.
A small plastic insert was fastened with two screws to the cart inside the hollow on
its upper surface (designed to carry extra masses). The insert provided a flat surface
on which each container could be attached using strong, double-sided adhesive tape.
This mounting system proved reliably rigid and allowed us to attach and detach the
containers with ease. However, we were limited in the maximum weight on the cart’s
wheels to less than 40 N, since beyond this load the springs began to give in and
became extremely soft, making the cart wobbly and subject to transverse oscillations.
Since our typical dry mass m0 (cart plus insert plus dry container) was in the range
900–1600 g, our containers could be filled with roughly 2–3 kg of water, depending
on the container being tested. We were also limited by the brimful heights Hb of the
containers (see table 2) and could fill them only up to about 2 cm below the rim in
order to prevent spilling during the back-and-forth motion of the cart.
With the system set in motion, its position was recorded using a PASCO motion
sensor aligned with, and located 30–40 cm from, the end of the cart. The motion
sensor works by repeatedly sending bursts of 49 kHz ultrasonic pulses and measuring
the time they take to reflect back from the moving cart. The sensor is connected to
a computer via a PASCO universal interface (ScienceWorkshop 750) and the position
versus time data can be saved in tabular form and/or displayed graphically on a
computer screen. We used the sampling rate of 100 or 120 Hz and the position data
231
Periodic oscillation of free containers driven by liquid sloshing
(a)
0.436
0.434
0.432
0.430
X (m) 0.428
0.426
0.424
0.422
0.420
0
1
2
3
4
0
1
2
3
4
5
6
7
8
9
5
6
7
8
9
(b) 0.512
0.510
0.508
X (m)
0.506
0.504
0.502
t (s)
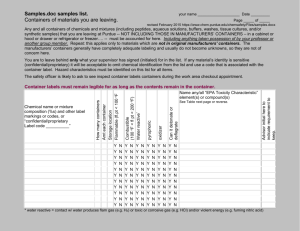
F IGURE 3. Damping of horizontal motions initiated for (a) the tall box at M = 1.66 and
(b) the large box at M = 1.52. Details for the tall and large boxes are given in table 2.
were obtained with the nominal accuracy of ±0.001 m; in practice, the measurements
are reliable at least to ±0.1 mm. To determine the frequency of the cart’s oscillations,
we read the elapsed time over multiple cycles (peak-to-peak or trough-to-trough), and
averaged the resultant periods over three separate runs for each liquid filling. We made
sure that there was a few seconds delay between releasing the cart and the start of
the recording so that most transients would attenuate. We also ignored the first few
recorded cycles, and the ringing at the end of each run with very small amplitudes; see
figure 3(b).
Each container was fabricated from transparent lucite to minimize the total weight
m0 of the tank plus the cart. The disadvantage is that the damping of standing waves
in lucite containers is much greater compared to that in glass containers (Keulegan
1959). Boxes and wedges had sidewalls composed of 1/8 inch plate, while the
cylindrical and annular geometries were composed of 1/8 inch wall cylindrical stock.
The bottom surfaces were fabricated from 3/16 inch or 1/4 inch plate. The wedge
was cemented to a base platform 5.1 cm × 7.6 cm. The cone and its 7.6 cm diameter
cylindrical base were machined as a single unit from solid cylindrical stock. Relevant
details of the containers are given in table 2 in which L = 2D for the boxes, Hb is the
brimful height of a container and m0 is the dry mass of the system, i.e. the mass of
the cart and insert, double-sided adhesive tape and Plexiglas container. To verify that
the liquid volume remained reasonably constant, we have measured the evaporation
rate of water from our containers. We found a very linear rate of evaporation per
unit surface area with time, the value being Revap = 7.00 × 10−3 g h−1 cm2 . For the
maximum six-hour period over which frequency measurements were made, we can
estimate the maximum percentage change in M for each container, %Mloss , and these
data are also included in table 2.
232
A. Herczyński and P. D. Weidman
Containers partially filled with water were set into motion by manually oscillating
the system and setting it free. Two traces of recorded container motion are presented
in figure 3. Figure 3(a) for the tall cylinder at M = 1.66 shows a complicated
response of the system that can arise depending on the initial conditions, in this
case a superposition of two distinct frequencies. More typical were traces resulting
from the superposition of oscillations in the lowest mode with a nearly constant
speed translation of the centre of mass (drift). None of these more complicated traces
were deemed usable for our measurements. We relied on regular, single-frequency
oscillatory traces with minimal drift, such as that shown in figure 3(b), taken using
the tall box at M = 1.52. We recognize that a sinusoidally driven linear actuator could
have been devised to place the cart supporting the container into motion at precisely
the expected frequency for each liquid filling. Sophisticated control systems have been
used, for example, to prevent sloshing of liquid moved in an open container as it is
carried by a robotic arm (see Feddema et al. 1996). However, as figure 3(b) illustrates,
the desired single-frequency oscillation mode can be obtained manually with some
practice. The drawback of this approach was that many runs had to be discarded since
they had unacceptable drift. For any particular configuration, our batting average for a
good, usable run was about one out of three attempts when exciting the fundamental
mode, and perhaps one out of 10 when trying to excite the second mode. The cart’s
oscillation frequency was determined by measuring the elapsed time for 3–10 cycles,
always at low oscillation amplitude to stay within linear theory.
Below, we present measurements for the geometries tested. In some cases
measurements could be made of the second mode of oscillation, but in no case
were we able to excite the third or higher modes, presumably because its frequency
would be too high, and its amplitude too low, to initiate manually. In the theoretical
computations we used the local value of the gravitational constant g = 980.366 cm s−2
provided to us by a colleague in the Department of Earth and Environmental Sciences
at Boston College. The density was taken to be that for pure water at the average room
temperature for the experiments, namely ρ = 0.9977 g cm−3 .
4.1. Rectangular containers
We have determined the number of terms necessary in eigenvalue equation (3.8) to
achieve three-decimal-place accuracy for the large box and compared the results with
those using the formulation of Yu (2010). We find that 15 terms are needed in our
modal expansion while only six terms are needed using equation (19) of Yu (2010) to
attain this level of accuracy.
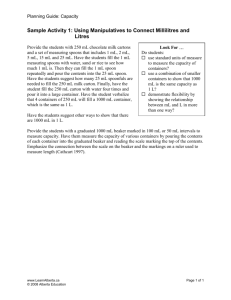
Results for the large box determined from (3.8) are shown in figure 4 in which
the solid lines are the numerically computed frequencies for the first two modes over
the range 0 6 M 6 2.0. Visible in this figure is the mode 2 maximum ω/ωR = 3.7269
at M = 1.900 corresponding to a maximum frequency ω = 19.678 rad s−1 . Mode 1
oscillations were recorded over a wide range of liquid fillings 0.5 < M < 1.5; below
M = 0.5 there was too little liquid mass to excite well-defined oscillations, and above
M ≈ 1.5 liquid sloshed out of the container. We were also able to initiate mode 2
oscillations, but only over a narrow range centred about M = 1. As will be seen
with the other geometries, the mode 1 frequency measurements agree better with
theory than the mode 2 measurements. It was always the case that the amplitudes
of the mode 2 oscillations were considerably diminished compared with those of
the fundamental mode and, as a result, a relatively small number of well-defined
damped oscillations were observed for the higher mode. Nevertheless, the agreement is
considered to be very good for both modes.
Periodic oscillation of free containers driven by liquid sloshing
4.0
233
Mode 2
3.5
3.0
2.5
Mode 1
2.0
1.5
1.0
0.5
0
0.5
1.0
1.5
2.0
M
F IGURE 4. Normalized oscillation frequencies for the first two modes of the large box
computed from (3.8) (solid lines) and corresponding experimental data (solid symbols). The
shallow-water reference frequency computed from (3.9b) is ωR = 5.280 rad s−1 ; details for
the large box are given in table 2.
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0
0.5
1.0
1.5
2.0
M
F IGURE 5. Normalized oscillation frequencies for the first mode of the tall box computed
from (3.8) (solid line) and corresponding experimental data (solid symbols). The reference
frequency computed from (3.9b) is ωR = 10.943 rad s−1 ; details for the tall box are given in
table 2.
In an effort to observe the frequency maximum, we fabricated the tall box.
Theoretical and experimental results for the first oscillation mode of this container
are displayed in figure 5. The maximum ω/ωR = 1.4796 in the numerical calculation
occurs at M = 1.47; this corresponds to a maximum frequency ω = 16.191 rad s−1 .
Owing to the relatively high frequencies associated with the first mode in the tall box,
the agreement with theory is not as good as with mode 1 in the large box (cf. figure 4).
Nevertheless, the experimental results track the theoretical curve fairly well, even if the
maximum frequency cannot be discerned in the measurements shown in figure 5.
234
A. Herczyński and P. D. Weidman
Mode 3
7
Mode 2
6
5
Mode 1
4
3
2
1
0
0.5
1.0
1.5
2.0
2.5
3.0
M
F IGURE 6. Normalized oscillation frequencies for the first three modes of the large cylinder
computed from (3.21) (solid lines), the distinct shallow-water asymptotes computed from
(3.23) (dashed lines) and the experimental data for modes 1 and 2 (solid symbols). The
shallow-water reference frequency computed from (3.22b) is ωR = 3.505 rad s−1 ; details for
the large cylinder are given in table 2.
4.2. Cylindrical containers
We have determined the number of terms necessary in eigenvalue equation (3.21) to
achieve three-decimal-place accuracy for the large cylinder and compared the results
with those using the formulation of Yu (2010). We find that 12 terms are needed in our
modal expansion while only five terms are needed using equation (30) of Yu (2010) to
attain this level of accuracy.
Numerical and experimental results computed from (3.21) for the first two modes
of oscillation for the large cylinder are shown in figure 6. In this case we take the
opportunity to display theoretical results for mode 3 oscillations. The dashed lines,
representing the low-M asymptotic solutions, show that each successive mode has its
own shallow-water behaviour. The maxima for modes 1 and 2 occur beyond M = 3
but the maxima for mode 3 occurs in the plotted region at M = 2.61 with the value
ω/ωR = 7.2828, corresponding to ω = 25.53 rad s−1 . In comparison to the large box,
we note that experimental data may be gathered over wider ranges of M for both
mode 1 and mode 2 free oscillations. Again, the agreement with theory is better for
the larger-amplitude mode 1 oscillations compared to mode 2.
In order to try to capture a maximum in the frequency oscillation curve, we
designed the tall cylinder. The numerical and experimental data for the mode 1
response in this geometry are shown in figure 7. The maximum in the frequency
curve occurs at M = 1.31 with the value ω/ωR = 1.612 44, corresponding to
ω = 17.46 rad s−1 . It is clear that the measurements track the theoretical curve very
closely; however, as with the tall box, the maximum is not clearly defined in the
experimental data.
The sloshing-induced motion of a cylindrical container has been observed in a
natural setting; see the Appendix.
4.3. Wedge geometry
Theoretical and experimental results for the wedge with 90◦ apex angle are shown in
figure 8. The theory for the single mode possible in this geometry is that given in
Periodic oscillation of free containers driven by liquid sloshing
235
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0
0.5
1.0
1.5
2.0
M
F IGURE 7. Normalized oscillation frequencies for the first mode of the tall cylinder
computed from (3.21) (solid line) and the corresponding experimental data (solid symbols).
The shallow-water reference frequency computed from (3.22b) is ωR = 10.833 rad s−1 ; details
for the tall cylinder are given in table 2.
(3.35). For this container, data could be obtained up to M ≈ 2.8, above which fluid
sloshed out of the wedge. The agreement between experiment and theory is considered
good, but we now see a clear trend – theory and experiment are generally in better
agreement for rotationally symmetric geometries compared to planar geometries (box
and now the wedge). Note in this case that ω/ωR ∼ M −1/4 as M → 0, in distinct
contrast to the box and cylinder geometries. But one must bear in mind that as M → 0
the liquid mass m in the container tends to zero, so there is no liquid to excite the
sideways periodic container motion in this limit. For this experiment the reference
frequency calculated from (3.35) is ωR = 12.017 rad s−1 .
4.4. Cone geometry
Theoretical and experimental results for the cone with 90◦ apex angle are shown
in figure 9. The theoretical frequencies for the only mode in this geometry is that
given in (3.39). For this container, data could be obtained only up to M ≈ 0.7, above
which fluid sloshed out of the cone. The agreement between experiment and theory
is considered excellent and supports the trend observed previously that theory and
experiment are generally in better agreement for axisymmetric geometries (cylinder
and now the cone) compared to planar geometries (box and wedge). For the cone,
ω/ωR ∼ M −1/6 as M → 0, but again in this limit there is no liquid in the cone to excite
the horizontal oscillations. For this experiment, the reference frequency calculated
from (3.39) is ωR = 9.638 rad s−1 .
4.5. Annular containers
We now present results for the sloshing-induced motions of partially filled concentric
cylindrical annuli. Experimental data and theoretical calculations for the first two
modes of sideways oscillation at η = 0.3644 are displayed in figure 10. While there is
no maximum in the plotted range of M for mode 1, mode 2 displays a maximum at
M = 2.20 with value ω/ωR = 6.1798 corresponding to ω = 21.66 rad s−1 . Agreement
between theory and experiment for both modes is considered excellent. As mentioned
236
A. Herczyński and P. D. Weidman
2.0
1.5
1.0
0.5
0
0.5
1.0
1.5
2.0
2.5
3.0
M
F IGURE 8. Normalized oscillation frequencies for the 90◦ wedge computed from (3.35)
(solid line) and corresponding experimental data (solid symbols). The small-M asymptote
M −1/4 (dashed line) is also shown. The reference frequency computed from (3.35) is
ωR = 12.017 rad s−1 ; details for the wedge are given in table 2.
2.0
1.5
1.0
0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
M
F IGURE 9. Normalized oscillation frequencies for the 90◦ cone computed from (3.39)
(solid line) and corresponding experimental data (solid symbols). The small-M asymptote
M −1/6 (dashed line) is also shown. The reference frequency computed from (3.39) is
ωR = 9.638 rad s−1 ; details for the cone are given in table 2.
in § 3.5, we cannot determine the free surface deflection for the annulus using only the
first azimuthal mode in the analysis. However, we could observe damped oscillations
in the annular region of wave sloshing and it was very interesting indeed. The free
surface signature of the motion revealed waves propagating around opposite sides
of the annulus that ultimately met in head-on collisions at θ = 0, π. Collisions with
splashing were observed only during the first couple of oscillations for which the
wave amplitudes were relatively large. The splashing observed in our experiment is
Periodic oscillation of free containers driven by liquid sloshing
237
7
Mode 2
6
5
4
Mode 1
3
2
1
0
0.5
1.0
1.5
2.0
M
F IGURE 10. Normalized oscillation frequencies for the first two modes of an annulus of
radius ratio η = 0.3644 computed from (3.50) (solid lines) and corresponding experimental
data (solid symbols). The reference frequency ωR = 3.505 rad s−1 computed from (3.22b) is
that for η = 0 for which m0 = 1129 g; details for this annulus are given in table 2.
reminiscent of that produced by the head-on collision of solitary waves reported by
Maxworthy (1976).
Motivated by the crossing of the η = 0.8 frequency curve with the lower η curves in
our sample calculation for the annulus given in figure 2, we fabricated a new annulus
at η = 0.777. The outer radius for the two annuli and the large cylinder was very
nearly 13.00 cm; see table 2. With this in mind, we normalize all results, those for the
cylinder and the annuli at η = 0.364 and η = 0.777, with the shallow-water reference
frequency ωR = 3.505 for the cylinder. The theoretical curves are shown in figure 11
along with the data for the cylinder (open circles) and the annuli (solid diamonds
and squares). All experimental data agree very well with the theoretical predictions
and indeed there is strong experimental evidence that the curves for η = 0.364 and
η = 0.777 will indeed cross in the neighbourhood of M = 2. In this presentation the
curve for η = 0.364 crosses the cylinder curve (η = 0), in contrast to the results given
in figure 2, where none of the higher η curves crosses the cylinder curve. This is
explained by the fact that the values of m0 = 2000 g are identical for each radius
ratio displayed in figure 2 but have different values m0 = 1129, 1207, 1644 g for
computation of the theoretical results for η = 0, 0.364, 0.777 in figure 11.
4.6. Waveforms and amplification ratios
The free surface wave profiles ζ /X0 for the large box (equation (3.4)), large cylinder
(equation (3.17)), wedge and cone (equation (3.25b)) are compared at the common
value M = 1 in figure 12. These are calculated at t = 0 for all containers and along
θ = 0 for the cylinder and the cone. The waveforms are plotted against the normalized
coordinate ξ = x/D for the box, ξ = r/R for the cylinder, ξ = x/H for the wedge and
ξ = r/H for the cone. Note that both the wedge and cone surfaces are flat, but that,
owing to the larger magnification ratio for the wedge, its rise height is larger than
that for the cone. We have taken photographs, and in some instances videos, of the
fundamental sloshing waveforms viewed from the side and find qualitative agreement
between the surface profiles with those presented in figure 12. In particular, free
238
A. Herczyński and P. D. Weidman
4.0
3.5
0.364
3.0
0.777
2.5
2.0
1.5
1.0
0.5
0
0.5
1.0
1.5
2.0
2.5
M
F IGURE 11. Normalized oscillation frequencies for the first modes of annuli with radius
ratios η = 0, 0.3644 and 0.777 computed from (3.50) (solid lines) and corresponding
experimental data (solid symbols). The reference frequency ωR = 3.505 rad s−1 computed
from (3.22b) is that for η = 0 for which m0 = 1129 g; details for these annuli are given in
table 2.
3
Wedge
2
Cone
Box
1
Cylinder
0
–1
–2
–3
–1.0
–0.5
0
0.5
1.0
F IGURE 12. A comparison of free surface waveforms for the large box, large cylinder, wedge
and cone computed at M = 1. The normalized horizontal coordinate is ξ = x/D for the box,
ξ = x/H for the wedge, ξ = r/R for the cylinder and ξ = r/H for the cone. Details for these
geometries are given in table 2.
surfaces appeared completely flat for sloshing waves in the cone and wedge, except for
small capillary effects around the wetted perimeter of the containers.
As a consistency check, we made one measurement of the amplification ratio for the
large box. For a liquid filling m = 815 g corresponding to M = 0.919, we took a video
of the oscillating wave near the end of the box on which was mounted a millimetre
scale to estimate the vertical displacement of the liquid at the endwall x = D. The
Periodic oscillation of free containers driven by liquid sloshing
formula for the amplification ratio for a box at fixed ω is given by
#
"
∞
X
ζ0 Dω2
1
2
=
.
1 + 2ω
X g
(kn D)2 (gkn tanh kn H − ω2 )
0
n=1
239
(4.1)
Note that the amplification ratio is not defined relative to the maximum free surface
deflection, which occurs near ξ = 0.75 for the M = 1 large-box profile shown in
figure 12. Evaluation of (4.1) at H = m0 /ρWL for the large box gives ζ0 /X0 = 1.4192.
Our measured amplification ratio ζ0 /X0 = 1.46 ± 0.05 is thus in excellent agreement
with the theoretical prediction.
We note that a series expression similar to (4.1) may be written down for the
amplification ratio in a freely moving cylinder. For the wedge and the cone geometries,
the amplification ratio is given by the following explicit formulae:
ζ0 3(1 + M)
=
(wedge),
(4.2a)
X 2M
0
ζ0 4(1 + M)
=
(cone).
(4.2b)
X 3M
0
Thus, as M → ∞, the amplification ratios become independent of M, being 3/2 for the
wedge and 4/3 for the cone.
4.7. Note on system damping
Though we do not attempt to derive an expression for the damping of oscillations
in any of our containers driven by asynchronous liquid sloshing, we consider how
it compares to the damping of standing waves in a stationary box. Keulegan (1959)
derived an expression for the damping due to viscous friction on the walls of a
rectangular box. He defines α1 as the damping modulus through the equation
a
= e−α1 t/T ,
(4.3)
a0
where T is the period of damped oscillations, t is time and a is the decaying amplitude
of the standing wave. Keulegan’s analysis leads to the following expression for the
damping modulus:
r
νT χ
α1 =
,
(4.4a)
π W
where
W
W
2H
π2
χ =π 1+
+
1−
.
(4.4b)
L
L
L sinh(2πH/L)
The energy loss per cycle of oscillation due to viscous dissipation in the liquid
proper was computed by Lamb (1932, § 348). Written in terms of Keulegan’s damping
modulus, we denote this contribution by α2 , viz.
2π2 νT
.
(4.5)
L2
Using ν = 0.01 cm2 s−1 , we find for the large box the values α1 = 0.020 28 and
α2 = 0.000 414. From the first seven oscillations of the large-box trace given in
figure 3(b) we find the damping coefficient αexp = 0.1089. It is clear that the
α2 =
240
A. Herczyński and P. D. Weidman
internal dissipation given by α2 is negligible compared to both α1 and αexp . The
damping modulus in the experiment is about five times that for a stationary box. Part
of the discrepancy is certainly due to the anomalous decay in lucite basins, well
documented by Keulegan (1959, figure 9). However, his analysis does not account
for the fluid–structure interaction present in our moving container, and the remainder
of the discrepancy between α1 and αexp is attributed to that effect, with also small
contributions due to the friction in the cart’s bearings and the rolling friction of the
cart wheels.
5. Discussion and conclusion
Experiments on the horizontal, rectilinear, sloshing-induced motion of free
containers oscillating over a nearly frictionless surface have been presented. The
apparatus used, made by PASCO, consisted of a four-wheel aluminium cart with
a fine suspension system that can move with very low friction on an aluminium
track. The measured frequencies for the fundamental and second modes of transverse
oscillation for box, cylinder and annulus geometries were obtained over a range of
dimensionless masses M = m/m0 , where m0 is the dry mass of the system and m is the
liquid mass inside the container. In addition, the frequency of the only sloshing mode
available for a wedge and a cone with 90◦ apex angles were obtained over a range
of M. Additional rectangular and cylindrical containers were designed in an attempt to
capture the predicted maximum frequency that obtains for each geometry, with only
partial success because of the relatively flat maxima in each case. More successful was
an experiment devised to document the theoretical prediction that a large-radius-ratio
annulus frequency curve will cross a lower-radius-ratio curve at some value of M. In
all cases, measurements are considered to be in very good, if not excellent, agreement
with the theoretical predictions.
We attempted to excite higher modes in all of our containers. In three of them
(large box, large cylinder and η = 0.364 annulus) we were able to observe the second
mode, though sometimes over only a limited range of filling ratios M. In none of our
containers could we observe the third (or any higher) harmonic, presumably because
these oscillations would be at frequencies too high to excite manually. They would
also have very small amplitudes, making them hard to discern.
Two trends in the data are apparent. First, measurements of the sloshing-induced
frequency of the axisymmetric containers (cylinder, cone, annulus) were generally in
better agreement with theory than those for the containers of planar symmetry (box,
wedge). We tested to see if this might be some capillary effect by adding several
drops of PhotoFlo to reduce the surface tension, but no discernible change in the
frequency was noted for these long, damped standing waves. Second, while damping
might be expected to reduce the oscillation frequency, our experimental results
are sometimes slightly above, but almost never below, the theoretical predictions.
Also, in all geometries except the wedge and the cone, evaporation would lower
the observed frequencies, whereas our measurements are nearly always above the
predicted values. We contend that this systematic trend is probably due to a slight
restoring force provided by the cart’s suspension system, especially at high fillings
when the depressed springs are more susceptible to coupling with the oscillations of
the liquid in the container.
Of particular interest is the fact that the transverse oscillation of sloshing-induced
motion in an annulus can be determined using only the fundamental azimuthal mode,
cos θ, with one nodal diameter. The shape of the oscillating free surface, however,
cannot be determined unless higher modes are included. Observations of the free
Periodic oscillation of free containers driven by liquid sloshing
241
surface motion revealed waves propagating around opposite sides of the annulus that
met in head-on collisions at θ = 0, π. Collisions with splashing was observed during
the first couple of oscillations during which the wave amplitudes were relatively large,
reminiscent of those produced by the head-on collision of solitary waves.
For the cylinder we have observed the sloshing-induced motion in a natural setting
described in the Appendix.
Acknowledgements
We have benefited greatly from discussions with Dr M. Cooker and Professor
J. Yu during all phases of this work. We thank the two referees whose comments
led to a much improved manuscript. We appreciate the precision work of J. Butler
(Colorado Plastic Products, Inc.) in fabricating the boxes and the wedge, and of
James Tucker (Tucker Precision Machining) for turning the cone on a lathe from solid
stock. M. Sprague provided special guidance in programming of Mathematica. We
thank Y. Peng who assisted in taking videos of our experiments and in some of the
measurements, and also J. Golden for providing us the precise internal diameter of the
Nissan thermos.
Appendix. The sloshing-induced motion of a thermos
While on a trip to climb Mt. Vinson in Antarctica during December 2010, P.D.W.
observed the transverse oscillations of a thermos induced by the sloshing motion
within. The results given in this appendix are all due to P.D.W. and will be described
from his point of view.
Each evening, the clients of the expedition were given a nearly full thermos of hot
water to take to their tents in order to stay hydrated. One evening a guide filled my
bottle about seven-eighths full of hot water and set it down on the horizontal hardpacked snow bench that formed part of the cooking shelf. It spontaneously began to
oscillate to and fro at relatively high frequency and then stopped suddenly. I estimated
the frequency to be two to three oscillations per second. Evidently, the hard-packed
snow provided a sufficiently smooth surface to enable sloshing-induced motion of the
thermos.
Back in Colorado I made an estimate calculation of the sloshing-induced frequency.
The measured dry weight of the vacuum insulated Nissan thermos (model FBB 1000
P6) is m = 501 g and its internal diameter provided to us by Nissan is D = 2 12 inch
(R = 3.175 cm). Assuming the 1.0 litre thermos was filled with 875 g of water, the
estimated value M = 1.75 is obtained. Using the nominal values ρ = 1.0 g cm−3 and
g = 980 cm s−2 , computation for the first mode of oscillation gives ω = 24.3 rad s−1 .
Since the oscillation frequency was not measured in situ, I will use the average value
ω = 2.5 Hz of the perceived frequency. Thus the theoretical value is to be compared
with the average value ω = 15.7 rad s−1 estimated for the Antarctica observation, some
35 % lower than theory. This is to be compared with our preliminary results for a
cylinder obtained using an air-bearing table, which were 10–15 % lower than theory.
I conclude that, while the hard-packed snow surface did provide a means to view
the sloshing-induced oscillation of the thermos, it is not an ideal frictionless surface.
Nevertheless, it was instructive to see the sloshing-induced motion occur in a natural
setting.
242
A. Herczyński and P. D. Weidman
REFERENCES
A BRAMOWITZ, M. & S TEGUN, I. 1972 Handbook of Mathematical Functions. U.S. Government
Printing Office.
A BRAMSON, H. N. 1966 The dynamical behaviour of liquids in a moving container. Tech. Rep.
SP-106. NASA, Washington, DC.
A BRAMSON, H. N., C HU, W.-H. & R ANSLEBEN, G. E. J R . 1961 Representation of fuel sloshing in
cylindrical tanks by an equivalent mechanical model. Am. Rocket Soc. J. 31, 1697–1705.
A RDAKANI, H. A. & B RIDGES, T. J. 2010 Dynamic coupling between shallow-water sloshing and
horizontal vehicle motion. Eur. J. Appl. Maths 21, 479–517.
BAUER, H. F. 1960 Theory of fluid oscillations in a circular ring tank partially filled with liquid.
NASA TN-D-557.
C AMPBELL, I. J. 1953 Wave motion in an annular tank. Phil. Mag. 44, 845–853.
C OOKER, M. J. 1994 Waves in a suspended container. Wave Motion 20, 385–395.
C OOKER, M. J. 1996 Wave energy losses from a suspended container. Phys. Fluids 8, 283–284.
DAVIS, A. M. J. & W EIDMAN, P. D. 2000 Asymptotic estimates for two-dimensional sloshing
modes. Phys. Fluids 12, 971–978.
D ODGE, F. T. 2000 The new dynamical behaviour of liquids in moving containers. Southwest
Research Institute, San Antonio, TX.
FALTINSEN, O. M. & T IMOKHA, A. N. 2009 Sloshing. Cambridge University Press.
F EDDEMA, J., D OHRMANN, C., PARKER, G., ROBINETT, R., ROMERO, V. & S CHMITT, D. 1996
Robotically controlled slosh-free motion of an open container of liquid. IEEE Proceedings,
International Conference on Robotics and Automation, Minneapolis, MN, pp. 596–602.
University of Colorado.
H ABERMAN, W. L., JARSKI, E. J. & J OHN, J. E. A. 1974 A note on the sloshing motion in a
triangular tank. Z. Angew. Math. Phys. 25, 292–293.
H ERCZYNSKI, A. & W EIDMAN, P. D. 2009 Synchronous sloshing in a free container. APS Division
of Fluid Dynamics, 62nd Annual Meeting, Minneapolis, MN, 22–24 November.
I BRAHIM, R. A. 2005 Liquid Sloshing Dynamics: Theory and Applications. Cambridge University
Press.
K EULEGAN, G. H. 1959 Energy dissipation in standing waves in rectangular basins. J. Fluid Mech.
6, 33–50.
L AMB, H. 1932 Hydrodynamics, 5th edn. Cambridge University Press.
M AXWORTHY, T. 1976 Experiments on collisions between solitary waves. J. Fluid Mech. 76,
177–185.
M OISEEV, N. N. 1953 The problem of solid objects containing liquids with a free surface. Mat.
Sbornik. 32(74) (1), 61–96.
M OISEEV, N. N. 1964 Introduction to the theory of oscillations of liquid-containing bodies. Adv.
Appl. Mech. 8, 233–289.
S ANO, K. 1913 On seiches of Lake Toya. Proc. Tokyo Math. Phys. Soc. (2) 7, 17–22.
S EUBERT, C. R. & S CHAUB, H. 2010 Closed-loop charged relative motion experiments simulating
constrained orbital motion. J. Guid. Control Dyn. 33, 1856–1865.
W EIDMAN, P. D. 1994 Synchronous sloshing in free and suspended containers. APS Division of
Fluid Dynamics, 47th Annual Meeting, Atlanta, GA, 20–22 November.
W EIDMAN, P. D. 2005 Sloshing in suspended containers. APS Division of Fluid Dynamics, 58th
Annual Meeting, Chicago, IL, 20–22 November.
W OLFRAM, S. 1991 Mathematica: A System for Doing Mathematics by Computer, 2nd edn.
Addison-Wesley.
Y U, J. 2010 Effects of finite depth on natural frequencies of suspended water tanks. Stud. Appl.
Maths 125, 373–391.