MEASUREMENT USE James Smith McDonnell, III
advertisement

INFERENTIAL MEASUREMENT OF AERODYNAMIC FORCES
FOR USE IN WING DIVERGENCE ANALYSIS
by
James Smith McDonnell, III
S.B., Princeton University
(1958)
SUBMITTED IN PARTIAL FULFILIENT
OF THE REQUIREMENTS FOR THE
DEGREE OF MASTER OF
SCIENCE
at the
MASSACHUSETTS INSTITUTE OF
TECHNOLOGY
September,
Signature of Author
1959
Signature redacted
Department of Aeronatics and
Astronautics, July 15, 1959
Certified by
Signature redacted
Thesis Supervisor
Signature redacted
Accepted by
Chairman, Departmental Commi tee
on Graduate Students
,
OF TECHNo
OCT 8i19
INFERENTIAL MEASUREKENT OF AERODYNAMIC FORCES
FOR USE IN WING DIVERGENCE ANALYSIS
by
James Smith McDonnell, III
Submitted to the Department of Aeronautics and Astronautics on
July 15, 1959, in partial fulfillment of the requirements for the
degree of Master of Science.
ABSTRACT
A method of divergence analysis has been formulated in which strain
measurements are utilized to determine aerodynamic influence coefficients.
Using this method, a divergence analysis of a cantilever delta.-type wing
was carried out, and the predicted values of divergence speed compared
with the actual values.
All work was performed at low subsonic speeds.
Thesis Supervisor:
Associate Professor of Aeronautics
and Astronautics
-
ii
-
Title:
Erik L. Mol1d-Christensen
July 15, 1959
Professor Alvin Sloane
Secretary of the Faculty
Massachusetts Institute of Technology
Cambridge 39, Massachusetts
Dear Professor Sloane:
In accordance with the regulations of the faculty,
I hereby submit a thesis entitled Inferential Measurement of
Aerodynamic Forces for Use in Wing Divergence Analysis in partial
fulfillment of the requirements for the degree of Master of Science.
Respectfully,
James S. McDonnell, III
iii
-
-
ACKNOWLEDGEMENTS
The author wishes to express his appreciation to the
following persons:
Professor Erik Moll-Christensen for his
advice and generous assistance throughout this work; Oscar
Wallin for his continual help in constructing the test
apparatus; Al Stone who mounted the strain gages in the wing
model; Professor Eugene Larrabee for his assistance with the
Student Wind Tunnel; and Mrs. C. E. Smart who typed the
-
iv
-
manuscript.
TABLE OF CONTENTS
Chapter No.
Page No4
Object
1
Introduction
2
Derivation of Method for Predicting
Divergence Speed of Wing
5
Test Apparatus
14
Experimental Procedure
18
Summary of Data
21
Calculations and Results
26
Discussion of Results
34
Conclusions
37
Accuracy of Angle of Attack Obtained
from Strain Measurements
38
Testing Wing for Actual Divergence
Speed
39
Design Calculations of Spar - Jones's
Low Aspect Ratio Theory
40
Calibration of Wind Tunnel
46
References
47
Appendices
A
B
C
D
PRINCIPAL SYMBOLS
[B]
matrix of integration weights
C(x, p)
flexibility influence function
E
modulus of elasticity
EI
bending stiffness
[G
matrix of integration weights
diagonal matrix of integration weights
section moment of inertia
lift per unit chord
)
L (
M
Ql(' ..r), Q2(
U
bending moment
r)
aerodynamic influence functions
velocity
applied wing load
c
maximum chord of wing
e
bending strain
h
spar thickness
length of spar
q
dynamic pressure
r
streamwise coordinate
5
distance in z-direction measured from neutral
axis of wing
w
width of spar
x
streamwise coordinate
-
- vi
-
7
spanwise coordinate
y
linear deflection of wing
Ax
chordwise distance
o(
angle of attack
wing semispan
taper ratio of spar
Subsc
d
denotes conditions at divergence
0
denotes initial conditions
t
denotes values at spar tip
t.e.
denotes values at wing trailing edge
a,b,...; 1,2,3,...
indicate chordwise wing stations
Superscript
(
)'
indicates chordwise differentiation
- vii m
OBJEOT
The object of this thesis was to determine
if
a divergence analysis of a wing could be performed
by utilizing strain measurements to evaluate aerodynamic influence coefficients.
-
- 1
CHAPTER 1
INTRODUCTION
Static divergence of a wing may be described as "the instability that
results when the structural restoring forces arising from a small structural deformation (of the wing) are overpowered by the aerodynamic forces
arising from the deformation" (reference 1).
For the usual type straight
or sweptback wing, divergence will ordinarily occur in a torsional mode;
that is, the wing is no longer able structurally to withstand the torsional loads acting on it.
In the majority of cases, however, divergence
of this type wing is of secondary importance in comparison to other
aeroelastic phenomena such as flutter and aileron reversal.
On the other hand, with the use of low aspect ratio wings and
control surfaces, in particular the Canard-type configuration, on some
of the present missiles, there is the possibility that the problem of
wing divergence will assume renewed importance.
Consequently, then, it
will become necessary to be able to predict at what speed, or more specifically, at what dynamic pressure a given wing will diverge.
And to be
of maximum value, such divergence predictions not only must be reliable,
but also must be accomplished while the missile or aircraft is still
in
the design stage.
Before any sort of divergence analysis can be performed on a wing,
however, an estimate of the aerodynamic forces that the wing will encounter
=2
-Th
must be made.*
Naturally, the accuracy of the ensuing divergence analysis
will be no better than that of the force estimation.
For wings of simple
shape and thickness distribution, expressions for the lift forces acting
on the wing can be obtained analytically (eg., see references 1, 2, 3,
or
4).
Such expressions, however, besides being quite complex at times,
are usually limited in usefulness and accuracy because of restrictions
and simplifying assumptions necessary in their formulation.
Moreover, for
wings of complex shape and thickness distribution, it becomes no longer
possible to obtain expressions for lift forces by analytical methods without having to make drastic approximations0
A more reliable approach to the divergence problem, then, would appear
to be the utilization of experimental data (obtained from a wind tunnel
model) in the estimation of the aerodynamic forces to be encountered by a
given full scale wing.
Such an approach is undertaken in this thesis,
the object of which was to determine if the divergence speed of a wing
could be predicted by utilizing strain measurements.
The wing model con-
sidered was a delta-type wing whose apex pointed upstream and whose
trailing edge was restrained from deflecting.
For such a wing divergence
occurs not in torsion as described previously, but instead in a streamwise
bending mode.
This is the simplest type of divergence and lends itself
well to the use of strain gages for determining bending stresses.
With the use of strain measurements taken on the previously mentioned
wing model, two aerodynamic influence functions were determined which could
* In the more general case of dynamic divergence, inertial loads
would also have to be considered. Here, however, only static divergence
will be dealt with. Hence, inertial loads will be omitted from the
analysis.
be used to predict the lift forces the wing would encounter in any given
deflection shape.
Once determined, these influence functions are used to
predict the divergence speed of the wing for any change in bending stiffness distribution without the need of additional wind tunnel tests.
The
advantage in this approach to the divergence problem lies in the fact
that the previously described aerodynamic influence functions can be determined for any given wing; no restrictions or assumptions concerning shape
or thickness distribution are necessary.
To simplify construction, however,
the wing model analyzed in this thesis was of constant thickness, and a
simple bending stiffness distribution was employed.
But as will be seen
in the following sections, these simplifications were by no means
necessary.
All experimental work performed in conjunction with this thesis was
carried out in the M.I.T. Student Wind Tunnel.
Using the method of
divergence analysis formulated in the following sections, divergence speeds
were predicted within eight percent of their actual values and dynamic
pressure at divergence within seventeen percent of true value.
Although
all work was performed at very low subsonic speeds in order to concen.
trate on the method itself, the successful results obtained indicate the
possibility of extending this type of approach to the divergence problem
to much higher speeds, supersonic and possibly even hypersonic.
CHAPTER 2
DERIVATION OF METHOD FOR PREDICTING DIVERGENCE SPEED OF WING
Formulation of Theory
(2.l)
Consider a delta-type wing whose trailing edge is rigidly restrained
from deflecting and whose apex is pointing upstream.
(See figure 1.)
The origin of an xyz-coordinate system will be located at the wing trailing edge with the maximum chord line coinciding with the x-axis.
its undeflected position the wing will lie in the xy-plane.
velocity U emanates from the positive x-direction.
In
A steady
For purposes of gen-
erality, the wing here will be assumed to have an arbitrary thickness
distribution.
Assuming the wing geometry to be symmetric with respect to the x-axis,
the lift
distribution will also be symmetric about the x-axis.
Conse-
quently, deformations of the wing will occur in bending only and only in
a chordwise direction.
Then assuming the wing structure to be linear,
the deflection of the wing at any point x due to aerodynamic lift forces
can be obtained using a one-dimensional influence function.
Thus,
C.
z(x)
(x( L
=
0
deflection at point x due to a unit lift force at point
'
; and L( (
)
where C(x, g ) is a flexibility influence function and equals the linear
is the aerodynamic lift per unit chord acting on the wing.
For sufficiently small deflections, the angular deflection of the
wing caused by the aerodynamic lift forces acting on it may be approximated
by the slope of the wing.
Hence,
C
the angular deflection of the wing at x due to a
where
unit lift
force at
The aerodynamic lift
per unit chord acting on the wing will now be
expressed asC
0
0
where q is the dynamic pressure, and
,
r) and Q2 ( (
dynamic influence functions, Q: (j , r) is the lift
(
,
r) are aero-
coefficient induced at
by the downwash (or upwash) resulting from a unit angle of attack at
r; Q2 (
,
r) is the lift
coefficient induced at (
by the downwash (or
upwash) resulting from a unit change in angle of attack at r.
2 and 3.)
Notice that from their definitions both Q1 ((
,
(See figures
r) and Q 2(
will depend only on wing geometry (i.e., shape, thickness, etc.).
they
will be independent of wing bending stiffness and dynamic pressure.
Introducing equation (2.3) into equation (2.2) and remembering that
* Justification for expressing lift as a function of both o( and
do/dr is implied by Jones's low aspect ratio theory. (See reference 2;
also reference 3, pages 247 and 248.)
** In the more general case of compressible flow, Mach number must
also be included.
-
- 6
,r)
Q(
cX
4
W(x) = C((X) -cx(x)
(2.4)
where co(x) is initial (zero velocity) angle of attack, there follows:
r
-
0((X
00
Letting [H] be a matrix of integration weights, equation (2.5) may
be expressed in matrix form as:
{I} -
<
=
g [C'][ H]([QiH1{) + [Q]FH
where the primes denote chordwise differentiation.
consist of values of o(, o(
,
and o('
(2.{6')
('
The column matrices
taken at discrete points along the
chord.
Equation (2.6) will be the underlying equation in the method of divergence analysis presented in the following two sections,
After [C1]
has been determined, either analytically or by static measurement, equation
(2.6) is used to determine
[Q,]
and [Q 2] .
Then once these two matrices
are known, (2.6) is used to predict divergence speeds for any desired
distribution of wing bending stiffness.
(2.2)
Determination of the Aerodynamic Influence Coefficients
Referring to equation (2.6), the elements of
[Qlj and
[Q2] are
determined by first giving the wing model an initial angle of attack dis.
tribution {o(0), then measuring values of {o(o and {o(') with the wind
tunnel running at a velocity less than the divergence speed of the model.
if
[Q]
and
[Q 2]
are to be nxn matrices, then a total of 2n wind tunnel
runs will be required to determine all of their elements.
In each run the
wing must be given a different initial angle of attack distribution,
As
will be shown later, these initial angle of attack distributions must
exhibit distinct linear independence.
In chapter 4 the method of obtaining
the initial wing deflections will be outlined.
Since a series of wind tunnel tests are to be run, and not necessarily
at the same tunnel speed, equation (2.6) must be rewritten as:
[o(] - [] = ['J[HJ (EQaEH][cK]Jr_
Each column of
of {o(
(o(.3
[o(,
[o(j, and
, and (o('}
+ [Q1J]W)
[o('] will now correspond to the values
obtained in one of the tunnel tests.
The problem now is to set up some means of measuring o(,
&(
(.i
o( , and
at given chordwise locations. This may be done by taking strain
measurements at discrete points along the chord.
time being, wing bending stress
-
a-
Neglecting signs for the
may be expressed as:
Ms
I (x)
where
M
is the bending moment; s
is the distance from the neutral axis
to the point at which stress is being computed; and I
is the section
moment of inertia.
Since the wing model will deflect only in chordwise
bending modes, it is assumed that it will obey the mechanics of a simple
beam.
Hence,
(.9)
M =Ex)
where
E is the wing modulus of elasticity.
Combining equations (2.8)
and (2.9) there results:
0~ = E sJz
jy
For sufficiently small deflections
(2.10)
2
.c((x)~
d= (X)
,
dO(X) = d' W
and
Hence, equation (2.10) may be rewritten as:
dl(() a
sE
But 7= eE , where
e
is bending strain.
Substituting this into
equation (2.11), there results, in matrix form-
[o
j
=[T]Le]
(2.12)
where the prime again denotes chordwise differentiation.
[~~]
2.1'3)
Likewise,
e0
is the bending strain due to the initial angle of attack dis-
tribution.
A positive lift force will now be defined to produce positive
where
strain; and positive strain in turn defined to produce positive
Using the trapezoidal rule for numerical integration,
determined from values of
o(' (x).
o(.
&((x) can be
Denoting the station at the wing
trailing edge by the subscript 1 and progressing in the positive x-direction,
there results, for an equal interval
AX
4(K
&x between stations:
+ _
(z14)
o(), and so forth.
Notice that positive values of c( will produce positive values of o(
Defining
[B] to be the matrix:
0
0
0
0
0.5
005
0
0
0.5
1
005
0
0.5
1
1
0.5
(2.15)
equations (2.14) may be written in matrix form as:
[j]
= zX
[B][
Substituting equation (2.12) into (2.16):
B [
e]
- 10
-
[c(] = Ax
(2.17)
.
+ o
o( +
+
0(4 =AX(
In like manner:
[]
[o(
[o( ]
,
,
and
6
[('
(2.18)
can now be computed from strain measure-
ments through the use of equations (2.12), (2.13), (2.17), and (2.18),
then placed in equation (2.7) to determine
method used to solve (2.7) for
Q1] and
[Q2 ].
The
[Q1] and [Q2] will be outlined in
chapter 6.
(2.3)
Method of Divergence Analysis
Letting {o() - 0, equation (2.6) becomes:
Cj=
Once
[C ]
1([Q jH o(] +
[H]
.o(.)
[Q 1] and [Q2] have been determined, this is the basic equation
from which the divergence analysis of the wing will be performed.
But
first it must be put in a more workable form by expressing fcOG in terms
of {o(}
Since the wing model is restrained so that its trailing edge
will not deflect, the elements of
will be zero.
[C]
Consequently, elements of
pertaining to the trailing edge
Q]
and
[Q2]
are indeterminate
there, and the corresponding row and column of these two matrices must be
omitted from the divergence calculations.
So that the matrices in equation
(2.19) remain conformable, the term in {o(} and
edge also must be deleted.
{o'(
at the wing trailing
Consequently, equation (2.16) loses its con-
formability, and a new relation between {c*} and f
is necessary.
Henceforth, for the purposes of divergence calculations, the following
expressions will be employed:
a
'O (AX),+
~
and so forth.
where the subscripts denote wing stations progressing in the positive xdirection; (,6x) 8 is the chordwise distance between the trailing edge and
station a; and (1 X)b the distance between stations a and b.
wing stations can be added in a similar manner.
Additional
Equations (2.20) are
obviously a cruder approximation than equations (2.14); but for the divergence mode of the wing, they should still give reasonably accurate results
since o((x) increases from zero at the trailing edge to its maximum value
at the apex, and o(' (x) remains positive over the entire chord.
LG]
to be the matrix:
0
L&X
(AX)b]
equations (2.20) may be written in matrix form as:
f
-
[G]
{&X3
(.? 2
and subsequently substituted into equation (2.19) to yield, after
rearranging:
=
[H] [
H[G
- 12
-
[G]o
+ [_j('H]) C(2.3)
Defining
The two quantities in equation (2.23) which a divergence analysis will
be concerned with are
q and
[C9]
If
.
[Cf]
is known, then (2.23) can
be solved for qd, the dynamic pressure necessary for divergence, by either
of two methods.
For a nontrivial solution of equation (2.23) to exist,
its principal determinant must vanish.
WG]
CHI (
G] -
Hence,
+[Q][H1)
(2.24)
= 0
Or alternatively, qd can be determined through matrix iteration by expressing equation (2.23) in the form:
{o.
[T c'
[H[J) fo(
HI L1[]G
(2.2S)
In general the latter method will probably be the easiest to carry out.
Before carrying out the actual divergence analysis of the wing,
equation (2.24) or (2,25) should first be used to predict the divergence
speed of the wing model used in the wind tunnel tests.
Its predicted
divergence speed can then be compared to its observed divergence speed
so that the over-all accuracy of the method can be determined.
The object of the divergence analysis is to predict what changes
will occur in divergence speed when the bending stiffness distribution of
the wing is altered.
Since
[Q 1]
and
[Q2]
are independent of wing
bending stiffness, a change in bending stiffness will show up only in
[C
.
Hence, a new value of
IC
corresponding to the new bending
stiffness distribution can be calculated, then introduced into equation
(2.24) or (2.25) to determine the new divergence speed of the wing.
No additional wind tunnel tests are necessary,
-
- 13
CHAPTER 3
TEST APPARATUS
(3.1)
Wing Model
The wing model used in the wind tunnel tests was built by the
Aeroelastic and Structures Research Model Shop.
As mentioned previously,
it was triangular in shape and cantilevered at its trailing edge.
figures 4 and 5.)
(See
The wing itself was constructed of balsa wood and
divided into chordwise sections for reasons to be explained shortly.
Through the center of the wing (in the streamwise direction) ran an
aluminum alloy spar.
If so desired, this spar could be given a shape
and thickness distribution to simulate the bending stiffness distribution
of an actual wing.
A change in bending stiffness could be accomplished
by simply altering the shape of the spar.
The entire bending stiffness
of the wing model was concentrated in the spar by dividing the body of
the wing into chordwise sections, each of the sections being clamped to
the spar at only one point.
Sufficient room was also left within each
of the sections to allow the spar to bend freely without touching or
rubbing one of them.
(See figures 6, 7 and 8.)
Consequently, the balsa
would contribute no bending stiffness to the wing.
As a result, the
bending stiffness distribution of the model could be accurately set,
Also, as will be discussed in the next chapter, the static measurement
of
[Cj
was simplified considerably since it could be performed on the
spar alone.
The maximum chord of the wing was set nominally at twenty-seven inches.
After rounding off the apex, an actual length of 26 7/16 inches resulted
which included a 1/32 inch gap between the sections to prevent them from
touching when the wing deflected.
There were a total of seven sections,
the tip section being 3 3/8 inches in chordwise length and the other six
3 13/16 inches.
The spanwise edges of the sections were also rounded off,
but the wing trailing edge was left blunt.
On both sides of all sections,
mounted flush with the wing surface, was a small aluminum alloy plate
into which were anchored screws to clamp the sections to the spar.
hooks could also be screwed into each of the plates.
Small
To the hooks were
attached restraining strings which, when secured to the walls of the wind
tunnel, prevented the model from deflecting past the elastic limit of the
spar.
Also attached were strings by which the model could be given an
initial angle of attack distribution.
with more fully in chapter 4.
This latter aspect will be dealt
The model span (i.e., width at trailing
edge) was set at 131 inches which resulted in an aspect ratio of unity.
To simplify construction of the wing, its thickness was made 5/8 inches
throughout.
Since the gaps between the wing sections were considerably
smaller, it was assumed that viscosity would hinder air flow between the
sections sufficiently so as to prevent an abnormal lift distribution
from occurring.
The wing spar was constructed of 75ST aluminum alloy.
For its
modulus of elasticity, a value of 10.4 x 106 pounds per square inch was
The spar had a constant thickness of 0.10
= 15
-
used in all calculations.
inches, and its width tapered from 1.69 inches at the wing trailing edge
to 0.10 inches at the forward tip.
The length of the spar within the
wing model was 26 inches, and an additional 6 inches protruded aft of the
trailing edge for purposes of mounting the model in the wind tunnel.
In
designing the spar, Jones's low aspect ratio theory was used to obtain
an initial estimation of model divergence speed.
These calculations
appear in section C of the appendix.
Commencing at the wing trailing edge, a pair of strain gages (Baldwin
SR-4 type A-7, gage factor: 1.96) was mounted every 6 inches along the
spar.
(See figure 6.)
A total of five pairs was required, the strain
gages in each pair being located on opposite sides of the spar.
tional dummy gages were used.
No addi-
The leads from the strain gages were run
out through the wing trailing edge, then along the model support and
through the tunnel floor.
(See figures 5 and 6.)
The wing was mounted in a vertical plane so as to simplify the
problem of giving it initial angle of attack distributions.
tion of the wing due to its own weight was eliminated.
Also deflec-
The model support
consisted of a length of four-inch steel channel welded to a steel floor
plate which was bolted to the floor of the test section.
The flanges
were removed from the top part of the channel so that two steel blocks
could be bolted there,
The portion of the spar protruding from the wing
trailing edge was then clamped between the blocks.
5.)
(See figures 4 and
A section of an old helicopter rotor blade was used as fairing
around the lower portion of the channel.
Additional Apparatus
All experimental work was performed in the M.I.T. Student Wind
-
16
-
(3.2)
This tunnel has a test section six feet wide by four and one-
Tunnel.
half feet high.
In the floor of the test section is a turntable on which
a model can be rotated about a vertical axis.
the wind tunnel was recalibrated.
Before test work was begun,
The results appear in section D of the
appendix.
The leads from the strain gages were connected through a switch-box
to an SR-4 Model K Strain Indicator.
Because of model oscillations caused
by tunnel turbulence, it was impossible to zero out the strain indicator
directly with any degree of accuracy.
Consequently, a resistance-
capacitance filter was installed between a vacuum tube voltmeter and the
output terminals of the strain indicator.
This filter effectively reduced
the amount of a-c signal entering the voltmeter so that it was possible
to zero out the strain indicator by using the voltmeter as a null indicator.
Through experiment it was found that a resistance of ten kilohms
and a capacitance of 790 microfarads produced optimum response in the
voltmeter; that is, the oscillation lowest in frequency and amplitude
while at the same time maintaining sufficient sensitivity in the voltmeter response for reasonable accuracy in zeroing it out.
17
-
-
CHAPTER h
EXPERIMENTAL PROCEDURE
(4.1)
Static Measurement of
[C']
) is the angular deflection of the
As mentioned previously, C'(x, '
wing at x due to a unit lift force at
measuring
unit lift
[C]
,
C']
was determined by first
, where C(x, 4 ) is the linear deflection at x due to a
force at
4
*
Then using the elements of
corresponding deflection curves, the elements of
by measuring slopes of these curves.
[C]
[C1]
to draw the
were determined
Since the balsa wing sections made
[C'J
no contribution to the bending stiffness of the wing,
was deter-
mined using only the spar.
The linear deflections were obtained by hanging scales from the
spar and using a surveyor's level to take the readings.
were made every three inches along the spar.
Measurements
The equation governing the
spar deflections can be expressed in matrix form as:
[c]
where
[z
is the matrix of spar deflections, and
of applied loads.
(4.1)
[W] is the matrix
In order to increase the accuracy of the static tests,
W] was made a unit diagonal matrix.
- 18
-
L
z]vj
(See reference 4.)
The resulting
values of [C]
(4.2)
and [C'j
appear in the following chapter.
Wind Tunnel Test Procedure
The wing model was given initial angle of attack distributions by
hanging weights from strings attached to the model,
These strings were
run through small holes drilled in the tunnel walls and then passed over
pulleys to minimize friction.
wing from deflecting.
Thus, the weights did not restrain the
By varying the sizes of the weights and their
points of application on the wing model, different deflection shapes
could be obtained.
But as mentioned previously, considerable care must
be taken to make sure that the initial angle of attack distributions are
distinctly linearly independent.
chapter 6.
lift
Reasons for this will be discussed in
Since equation (2.7) was derived in terms of aerodynamic
forces only, the forces due to the weights used to obtain the initial
deflections of the wing do not enter into the equation.
Because of the necessity that there be distinct linear independence
among the initial angle of attack distributions, only four test runs
in the wind tunnel could be made.
]
mine elements of [Q 1
and
As a result, it was possible to deterat only two wing stations.
[Q 2]
However,
strain readings were taken at all five strain gage locations in order to
improve the accuracy of equations (2.12), (2.13), (2.17), and (2,18).
Following is a summary of the four runs; the minus signs denote weights
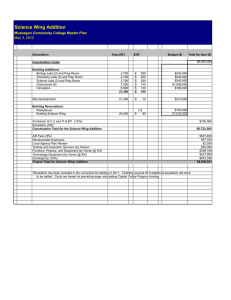
acting in the direction of negative lift.
of the various wing sections.
Figure 10 shows the location
The corresponding initial deflection
shapes are shown in figure 11.
19
-
-
Summary of Wind Tunnel Runs
Run No.
Tunnel Speed
(ft./sec.)
1
73.9
2
77*3
Locations and
Approximate Sizes of Weights
-2 lbs. from section D, and
3/4 lb. from section G.
21 lbs. from section C,
-2 lbs. from section E, and
} lb. from section G.
3
6o.5
h
6o..5,
1 1b. from section G.
a5.53* (o.o965o radians)
In runs 1-3 the test section turntable was clamped so that in its
undeflected position, the wing was at zero angle of attack.
In run 4
the turntable was rotated so that a constant initial angle of attack was
obtained over the entire wing.
The tunnel speed in each test run was
made high enough so that a significant difference was obtained between
all strain readings from any one strain gage.
errors in the readings would be minimized,
In this way the percent
On the other hand, the tunnel
speeds had to be kept low enough so that the wing would not deflect
against the restraining strings, the presence of the weights in some
cases lowering the divergence speed considerably.
run 3, for example.)
(See figure 11,
In order to minimize changes in tunnel temperature
from one set of readings to another, the zero velocity readings were
always made at the conclusion of a test run,
And to eliminate friction
forces within the pulleys, they were always tapped before the zero
velocity readings were taken.
20
-
-
CHAPTER 5
SUMMARY OF DATA
(5.1)
Flexibility Influence Coefficients
Spar deflections were measured every three inches along the spar and
at the spar tip.
0
0
(See figure 9.)
0
0.02
0
zI =
The results were, in inches:
0
0
0
0.05
0.07
0.10
0.15
0.24
0.34
0.52
0.70
0
0.10
0
0.16
o.49
0,85
1.20
0
0.19
0.68
1.26
1082
0
0.25
O0186
1071
2053
0
0029
1.04
2.15
3.34
0
0034
1.23
2.61
4.21
0
0.37
1.35
2.89
4,77
The columns in the above matrix correspond to the successive loadings.
The numbers underlined are the elements of
[C] , i.e., the deflections
at strain gage locations.
The other numbers are the deflections at
intermediate points (i.e.,
spar stations
-
M 21
a - e).
The resulting matrix of C '(x, g ) turned out to be, in radians per
pound:
0
-
[Cv]
0
0
0
0
0
0.O155
0.0427
0.0768
0.1073
0
0.0155
0.0607
0.1325
0.1902
0
0.0155
0.0607
o.1475
0.2583
0
0.0155
0.0607
O.1475
0.2801
I
(5.2) Wind Tunnel Data
The strain readings from the wind tunnel tests were as follows,
where R0 is the zero reading, Ri the reading with the wing initially
deflected, and Rf the final reading (tunnel running):
Run #1
Run #2
Sta.2
Sta. 3
Sta. 4
Sta. 5
Rf :
5,590
4,835
6,995
7,720
5,490
Ri:
5,770
5.9010
7,020
7,670
5,1465
Ru:
6,450
5,9250
6,285
6,705
5,o55
Rf:
6,370
49700
5,735
7,355
5,9375
Ri:
6,570
4,970
5,930
7,430
5,380
RO:
6,490
5,280
6,300
6,710
5,060
Refer to figure 9 for location of wing stations.
22
.
*
Sta.l*
Run #3
Run #4
R :
7,950
6,900
7,575
7,560
5,30
R :
7,2h0
6,150
7,080
7,370
5,330
R
6,530
5,320
6,315
6,715
5,o6o
R
8,025
6,600
7,030
6,940
5,080
5,300
6,310
6,710
5,060
Ri:
---
,:
6,520
Since a pair of strain gages was located at each wing station, the
strain readings must be halved to obtain the actual values of strain.
Hence,
e.o=
where
e
2
(s.i)
e = R_-R.
;
R-R.
is the final bending strain (in microinches per inch), and
eo
is the initial bending strain (due to the initial angle of attack distribution),
The strain matrices then become, with their columns corresponding
to the successive tunnel runs:
[e 0 ] = 10-6
x
-340
4o
355
0
-120
-155
415
0
367
-185
383
0
483
360
327
0
205
160
135
0
-23
so
[e]
10- 6
-430
-60
710
753
-207
-290
790
650
355
-283
630
360
507
323
423
115
217
157
140
10
As mentioned previously, the bending stiffness of the wing is
concentrated in the spar.
Consequently, equations (2.12), (2.13),
(2.17), and (2.18) may be expressed as:
[9c]= [e]
5.2)
h
[() = 2 h&X [B][e]
(5.4)
[cO] = 24 X[B] [e-J
(5.5)
where h is the spar thickness, and
Ax- 6 inches.
be used in conjunction with runs 1
must be made for run 4, where ao
~c,0 4+ A X[B] {o(' =
These equations can
3; but the following modifications
-
0.09650 radians:
+
{o(o(
After carrying out the preceding calculations, where
(2.15), there results, in radians:
-
-24
(2.X)
[B]{S)
[B]
is given by
[o(0
*
[(j
=
=
0
0
0
0,09650
-0,02760
-0.00690
0.04620
0.09650
-0.01278
-0.02730
0.09408
0.09650
0.03822
-0.01680
0.13668
0.09650
0.07950
0.o1440
o.1644o
0.09650
0
0
0
o.09650
-0.03822
-0.02100
0.09000
0.18068
-0.02934
-0.05538
0.17520
0.24128
0.02238
-0.05298
0,23838
0.26978
0.06582
-0.02418
0.27216
0.27728
-0.00860
-0.00120
0,01420
0.01506
-0.00414
-0.00580
o.o580
0.01300
0.00710
-0.00566
0.01260
0.00720
0.01014
0.00646
0,00846
0.00230
0.00434
0.00314
0.00280
0.00020
-25-
CHAPTER 6
CALCULATIONS AND RESULTS
(6.1)
Solving Matrix Euation for the Aerodynamic Influence Coefficients
In order to solve equation (2.7) for
[Q1]
and
[Q2]
it will be
partitioned to form two separate equations; half the test runs will form
one equation, the other half the second equation.
=
(-(
-
0(
)
;4
Letting:
(.)
eK]
[N"]
=
[-c4
= OH]L 0'O
and
;
[K(2
;
[NZ]
A]
[H1[C(2)
H
[C 'IJH
(6.4)
where the superscripts refer to the two equations, there results after
some rearrangement:
Q
and
[A]
GP'jr~f]
Kj
+
Q][NG]
+
[QJ [N'zJ
=QJ[K(2)]
- 26
-
A
(6.5)
Postmultiplying equation (6.5) by
[N(2)]
[A] -
[N(l)] -1
nd equation (6.6) by
.1
[()[N
Q [K (' N
= LQ][K2[Nz)]
+ [QJ
(6.7)
[Qz]
(6.8)
+
Subtracting equation (6.8) from (6.7):
- [K (]EN
[K MN
Letting
[5]
= [Kj [N'
T
= [(A'
N
-
[
-
(6./0)
[s][
~N)
In like manner, after postmultiplying equation (6.5) by
equation (6.6) by
[K(2)] -1
there follows:
[A]
-(
K"'
=
[i.]=[A]-[e
[N[NK0)
N[K
i'
LN
-
'[K
-
27
L
and
[[1 TL K~ '(1
-
-
T
[K()] ~1
and subtracting the resulting equations,
QLetting
(6.1i)
(6.)
K][K0.K)
K
T
(6.I4)
During the course of the work presented in this thesis, it was
observed that if the initial angle of attack distributions of the wing
model were not distinctly linearly independent,
the columns of
[o]
would be almost simple multiples of one another; and similarly, also,
the columns of [('
.
[N] would be small.
Consequently, the determinants of
As a result, any errors in [o(] and
be greatly magnified in the inverses of jK] and [N]
4 for a numerical example.)
[a]
.
The ensuing values of [Q1 ]
[K] and
would
(See reference
and
[Q2]
would then be totally unreliable and the results of any divergence analysis
useless.
(6.2)
Numerical Values of the Aerodynamic Influence Coefficients
As mentioned previously,
two wing stations.
h were selected.
[Q,]
and
[Q 2]
can be determined at only
To obtain an optimum spread in data, stations 2 and
(See figure 9.)
Wind tunnel runs 1 and 3 will be paired
together and denoted by superscript 1; runs 2 and h by superscript 2.
There then follows from the results of chapter 5:
)
_0.02238
0.23838
-28
L
-0.01584
0.10170
-o.14lo
0.08418
4-0,03618
0.17328
=
-
0.09000
4380
L]
[a - [
= 0.03822
-0.01062
-0.02100
0.18068
-0.05298
0.26978
L( j
-0.00414
0.01580
L.01014
0 , 00 846
o
C'
.00580
0.01300
_0.0646
0.00230
0.0155
0.0768
O.0155
0.1475_
The matrices of dynamic pressures are, in pounds per square inch:
[1.
yi
004509
0O=
0.0 4 934
0
O.03O22
0
0
O.03022
The matrix of integration weights will be determined using the trapezoidal rule.
fr(
0
Referring to figure 9,
=
f,+
()+-6+f
(
2 ,+
+ 10. 218?5
where f(x) is an arbitrary function and
apex.
+)
+ 4 + -Ft (81)
dx
+ 4-. ?18
t
657/5
(6.15)
denotes the wing tip or
From equation (6.15), for wing stations 2 and 4:
[H]
oooo
-9
1- 0
O
10.21875
Then after carrying out the calculations in equations (6.1 - 6.4),
(6.1Q - 6.11), and (6.13 - 6.14), there results:
-
- 29
[Q,
IQ2]
2.71376
-2.29502
1.16918
0.96033
-9.79559
2.95760
-3o76830
-1.13971
Notice that the signs of the elements of [Q 2] appear to be reversed.
This arises from the fact that both angle of attack and do(/dx have been
defined to be positive as shown in figure 3.
But as seen by the approach-
ing velocity, do(/dx in figure 3 is actually negative since the angle of
attack changes from a positive value to zero.
Hence, in a more consistent
treatment, equations (2.16) and (2.22) should respectively be changed to:
c] = -A
[BJ[oC] ;
f 0() = - [G ]fo('
where it is understood that a negative dc4/dx would produce a positive
angle of attack,
(6.3)
Divergence Analysis of Wing Model
Divergence speed will first be calculated for the original bending
stiffness distribution of the model (i.e., the spar used in the wind
tunnel tests).
In actual practice this step would be carried out to
determine the over-all accuracy of the analysis.
Then, as a practical
example, and also as an additional check, the divergence speed for a
different bending stiffness distribution will be calculated.
cases the method of matrix iteration will be used.
- 30
L
In both
Rewriting equation (2.25):
. o)
[G]
=
C]H]( [Q,][H][G] + [QJ[HI) {oQJ
(2.25)
where qd is the dynamic pressure at divergence. [Gi is given by (2.21),
where the subscripts
a and
b will now denote wing stations 2 and 4.
Referring to figure 9,
[G]
[Z 2 ]
S[Q]
LH]
and [C]
6
o
6
12
for the original spar were determined
in the preceding section of this chapter,
Substituting these matrices
in equation (2.25) and performing the indicated calculations, there
results-,
Fo0(
_
9.6094
8.0392
(.'
I
L_
_5.302 6.3887 O
After carrying out the iterative process (outlined in reference 3),
equation (6.16) converges to,
S[(K]
14.725
LAi
9,369
Ud =
1
14.725
14.725
1.0000
0.6363
0.067912 psi, and
90*7 ft* s*c*
- 31
-
Hence, qd
1
The actual divergence speed was observed to be 84 feet per second
(dynamic pressure 0.0583 pounds per square inch).
The method of testing
the wing model for divergence is discussed in section B of the appendix.
A different distribution of bending stiffness in the wing model was
obtained by changing the shape of the original spar.
The thickness was
left the same, but the spar width at the wing trailing edge was narrowed
down from 1.69 inches to 1.03 inches.
The width of the spar at its tip
was also unchanged, but in between sufficient material removed so as to
obtain a constant taper from the trailing edge to the tip.
EC'
CX
for the new spar was calculated from the equation:
=
IS
X
(-
(EI)(x-).=
e
[_
where (EI)te,,
f.
is the value of bending stiffness at the wing trailing
edge; ) is the spar length; and
width at tip
X
A
is the spar taper ratio (i.e.,
4 width at trailing edge).
in section C of the appendix.
values of x and
Equation (6.17) is derived
After working out the calculations for
at wing stations 2 and h, there is obtained for the
new spar:
LC1
=
0.0220
0.1126
0.0220
0.2394
Substituting this value of
[CI]
into equation (2.25) and performing
the necessary calculations, there results:
-
- 32
. '
14l1784
9.5130
('
12.059][o]
1.4579
(,.8)
d(
After carrying out the iterative process, equation (6.18) converges to:
23.615
-
01
Hence,
od
-
1
- 23.615
078249
18*479
-
1.00000
0.042346 psi, and
Ud a 71.6 ft./sec.
The actual divergence speed was observed to be 69 feet per second
(dynamic pressure 0.0393 pounds per square inch).
this measurement would not have been made.
In actual practice
Here it was done to check
the reliability of the method as a whole, not the specific calculations.
-
- 33
CHAPTER 7
DISCUSSION OF RESULTS
Comparing the results obtained in the preceding chapter, divergence
speed was predicted within eight percent of actual value and dynamic
pressure at divergence within 16.5 percent for the original bending
stiffness distribution of the wing model.
It is of interest to note
that the same quantities predicted by Jones's low aspect ratio theory
were, respectively, ten and twenty-one percent in error.
(These calcu-
lations are contained in section C of the appendix.)
For the second bending stiffness distribution, the divergence
speed and dynamic pressure at divergence predicted in the preceding
chapter were within four and eight percent, respectively, of their
observed values.
Although these results do represent an improvement in
accuracy, their real significance lies in their substantiation of the
foregoing method of divergence analysis.
Since the principal objective of the experimental work undertaken
in this thesis was to determine if strain measurements could be effectively used in performing a divergence analysis, the need of obtaining
precise data was not paramount.
evaluation of the method.
More important was the over-all
On the other hand, if the method of diver-
gence analysis presented herein were to be applied to an actual wing,
-
- 34
and especially if extended to supersonic flow, certain refinements in
technique should be incorporated in order to improve the accuracy of the
data obtained.
The primary source of error encountered in the present work was
model oscillations, caused mainly by tunnel turbulence, which resulted
in considerable fluctuation of the strain readings.
It is estimated that
the majority of these readings were obtained within eight percent of
their true steady state values although some were probably as much as
fifteen percent off.
As mentioned in chapter 3, the use of a resistance-
capacitance filter in conjunction with a separate null indicator did help
considerably in zeroing out the strain indicator, but its usefulness was
limited by the loss in sensitivity which resulted.
A more direct method of improving the accuracy of the strain measurements would naturally be to minimize tunnel turbulence.
This could be
accomplished by installing additional screens in the return section of
the wind tunnel to smooth out the flow, provided the accompanying loss
in tunnel performance could be tolerated.
In addition, however, it is
recommended that in any future work, strain measurements be recorded on
an oscillograph trace instead of being obtained directly by visual means,
This would not only yield a better over-all picture of the strain
fluctuations, but would also reduce tunnel operating time by eliminating
the process of zeroing out the strain indicator for each reading.
In section A of the appendix is a comparison of measured values
of angle of attack with values calculated from strain measurements.
The largest errors are seen to occur in the vicinity of the wing trailing
edge where naturally the rate of change of angle of attack will be greatest.
-
- 35
This situation can easily be remedied, though, by the use of additional
strain gages.
The distance between strain gage locations would then be
reduced and, hence, the numerical integrations improved.
-
- 36
CHAPTER 8
CONCLUSIONS
A method of divergence analysis has been presented in which strain
measurements are utilized to determine aerodynamic influence coefficients.
Using this method, favorable results were obtained in a divergence analysis of a cantilevered delta wing.
Although the work was carried out at
low subsonic speeds, the successful application of the method points up
the feasibility of extending it to supersonic speeds and possibly, also,
to more complex wings.
But regardless of the application, care must be
taken to ensure that the strain measurements will possess sufficient
linear independence.
Otherwise, the resulting divergence calculations
will be meaningless.
-37
APPENDIX A
ACCURACY OF ANGLE OF ATTACK OBTAINED
FROM STRAIN MEASUREMENTS
As mentioned earlier, the value of
[C'3 used in the determination
of the aerodynamic influence coefficients was measured from static deflection curves of the wing spar.
But to obtain an estimate of the
accuracy of values of angle of attack calculated from values of bending
strain, the elements of
wing station
5
[CI]
pertaining to a unit lift
were also determined from strain readings.
was used in these calculations.
force acting at
Equation
(5.5)
A comparison of results follows; the
percent errors are based on the values obtained from the static deflection
curves.
Values From
Deflection Curves
Values From
Strains
C15
0
Percent
Error
0
C
0.1073
0.0938
C35
0.1902
0.1815
h.57
C#
0.2583
0.2553
1.16
C
o.2801
O.2877
2.72
38
12.6
APPENDIX B
TESTING WING FOR ACTUAL DIVERGENCE SPEED
In order to prevent destruction of the wing model in divergence,
its maximum deflection was limited by restraining strings.
The wing was
then considered to be in a diverged state when it remained deflected
against one of these restraints, that is, the string remained taut.
But
because of tunnel turbulence, the precise speed at which the wing did
diverge was difficult to determine.
Moreover, it
was observed that if
the restraining strings were not made sufficiently long, the wing
would not remain diverged at speeds at which it
had remained so when
allowed to deflect more.
As divergence speed was neared, however, the natural frequency
of oscillation of the wing in response to an applied disturbance
approached zero.
Consequently, divergence speed was determined to be
that speed at which the frequency became vanishingly small even though
the wing did not necessarily remain indefinitely deflected against the
restraints.
-
- 39
DESIGN CALCULATIONS OF SPAR
-
APPENDIX C
JONES'S LOW ASPECT RATIO THEORY
In order to obtain a preliminary estimate of the divergence speed
of the wing model for purposes of designing the spar, Jones's low aspect
ratio theory was used to predict the lift
forces on the model.
A
summary of the calculations follows.
The angular deflection of the wing due to aerodynamic lift
given by equation (2.2).
is
Letting o( 0 (x) equal zero, this equation may
be rewritten as:
(x) =fC(x,4) L(g)Jd
) is the lift
per unit chord.
Using Jones's low aspect ratio theory (see reference 2 or 3), L (
may be expressed as:
.x
-h4TrWre
/!
ithlo& o) 1h
is the local semispan of the wing.
- 40
-
where
(
L(g) =
n(0-2)
)
where, again, L (
(c-i)
Substituting equation (C - 2) into equation (C - 1) and rewriting
in matrix form, there results:
{o(I
a)&]I[&]{o
fe (c-.3)
2TICJH(
2
LHJ
where
is a matrix of integration weights, and the primes denote
chordwise differentiation.
The positive x-direction will again be taken
as in figure 1.
{(3
may be expressed in terms of {oc)
using equation (2.16).
For wing stations at the trailing edge, mid-chord, and apex there results:
{f
where now
4)
=~C
[B -1(C
0
0
0
0.5
0.5
o
0.5
1
o.5
EB]
(C
Introducing equation (C - 4) into equation (C
[C]
as
c
1
,
-
-5)
3) and expressing
where (EI)te is the value of bending
t.e.
stiffness at the wing trailing edge, there results after rearrangement:
K
[B]
-ll()
-
[c'1[H](
' H.
C
[g[,][j
+
62]]
=-
For equation (C - 6) to possess a nontrivial solution, its principal
determinant must vanish.
Hence, for divergence:
i41l-
+ P,
t9CZ[H( cJ9
tBI-
From wing geometry, and letting
c
j
)
(C--7),
be twenty-seven inches, there
results:
6.750
0
0]
3.375
0
0
0
45.6
0]
-n
3
0
0
0
0.25
-
0
0
11.4
o
0
0
0
0
0.25
0
0
-0.25
0
Using Simpson's rule for numerical integration:
0
[CI]
04
0
4.5
for the wing spar will now be determined by analytical
Assuming the spar obeys the mechanics of a simple beam, there
results at point
x
for a unit load at I
i-x
El (x)
=C
x)
- 42
-
methods.
18
-
EH]
0
:
) ,
x
(c-8)
Since the spar thickness is constant:
EIr(Y)
= I.
where
and
-
=
= I-
__
-t.e.
(EI).e.
I- __
w is the local width of the spar,
the length of the spar.
(C - 8) and letting
A
Y
W.e./ T
Wt.e.
wt
(c -s)
the width at the spar tip,
Substituting equation (C - 9) into
equal wt/wte, there results:
C" (x, ) =
(EI).t. I -(,-X
(c -io)
T
'..-.
After carrying out the indicated division:
(c-u)
-
C"(X4
(EI)~
t~e. -X
(-X
+
"X
After integrating both sides of equation (C - 11) with respect to
x
and applying the boundary conditions for a cantilever beam, there results:
C'(x,4) =
(EI)t
-,
-
h
(c-I?)
To simplify the design calculations, the length of the spar was
considered the same as that of the wing (i.e., twenty-seven inches).
X
equal to 0.058 and evaluating equation (C - 12) at the
-W43
-
Setting
wing trailing edge, mid-chord, and apex, there results:
1
ECIu I
(E)
0
0
0
0
109
356
0
109
635
Then after substituting the various matrices into equation (C - 7)
0
0
07
6.75
6.75
0
6.75
-
and carrying out the calculations, the following is obtained:
6.751
13o5
(E), e
0
0
0
22,300
0
0
22,300
0
0
a 0
(C - 13)
6.75
+
The condition for divergence thus becomes:
22,300,.
6.75
- 0
6.75
whereM
for
P4,
22,300)A
2
is equal to
7T qd
(C - 14)
13.5
(in.-4 ).
Solving equation
(C - 14)
there results:
S-0.000303 in.
(C - 15)
where the minus sign originates from the direction of the velocity being
taken in the negative x-direction.
equal to 1,465 lb.-in. 2
, *
Taking (EI)t
(See figure 1.)
equation (C - 15) gives,
*It was originally planned to design the spar so that the wing model
would diverge at approximately eighty miles per hour (117 feet er second).
The required value of (EI)t.e. was thought to be 1,465 lb.-in.
However,
an error in the calculations was discovered after construction of the
spar had already begun.
disregarding the minus sign:
qd a 0.0707 psi;
and hence
The actual value of
Ud - 92.5 ft./sec.
X,
in equation (C - 12), turned out to be
0.0592 (instead of the 0.058 used in the calculations).
The effect on
the preceding values of qd and Ud should be slight, however.
-
.1
45
APPENDIX D
CALIBRATION OF WIND TUNNEL
Permanently installed in the Student Wind Tunnel is a manometer
which measures the difference between the static pressure in the test
section and that in the settling chamber.
Since the air in the settling
chamber does not actually come to rest, there is a slight difference
between the pressure in the settling chamber and true stagnation
pressure.
To measure true dynamic pressure, a second manometer was connected
to a Pitot-static tube installed in the test section.
From the dynamic
pressure readings, tunnel velocities were computed and plotted against
the readings of the tunnel manometer (figure 12).
Runs were made with
the Pitot-static tube installed both immediately forward and immediately
aft of the test section turntable.
There was found to be negligible
difference between the corresponding velocities.
All runs were made
with the model support removed from the tunnel.
The specific gravity of the alcohol in the two manometers was
measured to be 0.807 (at 700 F).
temperature change were neglected.
Variations in this value due to
Compressibility effects were also
neglected.
-
- 46
REFERENCES
1.)
D.J. Martin and C.E. Watkins, "Transonic and Supersonic Divergence
Characteristics of Low-Aspect-Ratio Wings and Controls," Institute
of the Aeronautical Sciences report no. 59-58, 1959.
2.)
R.T. Jones, "Properties of Low-Aspect-Ratio Pointed Wings at
Speeds Below and Above the Speed of Sound," NACA TR No. 835, 1946.
3.)
R.L. Bisplinghoff, H. Ashley, and R.L. Halfman, Aeroelasticit,
Addison-Wesley Publishing Company, Inc., Cambridge Mass. 1 5.
4.) E. Mollb-Christensen, "Utilization of Experimental Results in
.
Flutter Analysis," Journal of the Aero/Space Sciences, Vol. 25,
No. 10, October, 19
5.)
F.B. Hildebrand, Methods of Applied Mathematics, Prentice-Hall,
Inc., Englewood Cliffs, N.J., 1952,
6.)
W.M. Murray, "The Wire-Resistance Strain Gage (SR-h Type)," notes
prepared for Testing Materials Laboratory, M.I.T., course 2.37,
Feb. 2, 1953.
7.)
D.J. Peery, Aircraft Structures, McGraw-Hill Book Company, Inc.,
New York, N.Y., 1950.
8.)
S. Timoshenko and G.H. MacCullough, Elements of Strength of
Materials, Third Edition, D. Van Nostrand Company, Inc., New York,
N.Y.,
1949.
9.)
S. Timoshenko and J.N. Goodier, Theory of Elasticity, Second
Edition, McGraw-Hill Book Company, Inc., New York, N.Y., 1951.
10.)
A.H. Shapiro, The Dynamics md Thermodynamics of Compressible
Fluid Flow, Vol. II, The Ronald Press Company, New York, N.Y.,
1934.
U
.P r
z
L(x)
U
z(x
/,r
Fig. 1
-
Coordinate system.
U
Fig. 2 - Unit angle of attack at
r, positive as shown.
z
U
rr
Fig. 3 - Unit change in angle of attack at
-
- 48
r, positive as shown.
Fig. ii. - View of wing model and support looking downstream.
1'
I
I
Fig. 5 - View of wing model and support looking upstream.
Fig. 6
-
Wing model with spar in place; top halves of
wing sections removed.
Fig. 7 - Wing sections; top halves and spar removed.
iig.8.- Typical wing section, other half similar.
3t-
'I
-3"
3
3"
--
3
3".
3.
2"
16
ac)d
Q
U3)
Fig. 9 - Spar stations at which deflections were measured for
the determination of [CI]. X's denote strain gage
locations.
-
52
-
()
311
)
F
L
Fige 10 - Position of wing sections.
z
z
x
x
b.) Run No. 2
a,,) Run No~ l
z
x
c,) Run No, 3
d.) Run No.
Fig. 11 - Initial deflection shapee of wing model.
- 53 -
4
1' t
.i
4'-.114:Ii1414--fh
iii
T
4
4
1
'1-
-i_14
1 -
L
4-4
iI
4
I~4
T-'r
-
-1 4-
Tht
r
4 I4
-t
ff4"
14-
'I-44-
i
I
4
4171
,-t
_-4L
1
+
.
44h
'I
7j -__
77-
4
.
1-J
4-1 r
~~
TI1
4~2
J-41
~
t4
1:~i-_
'4
-
1
______________7-
4+
t
Tr
j
t
l~
LiFT
~
+
-1. .
1,~tf
4
~~4r~
I4t
t
I
;4I
t I.
~
-- iT
7
1 J1
J
J~
44
- -1 -
4--i
4
.:_
-v
'
T
LPrT'
y
q
Ift-
-41