Physics of the mitotic spindle
advertisement

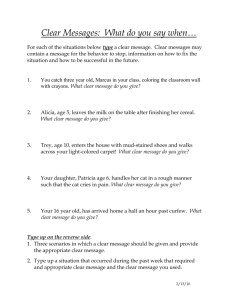
Physics of the mitotic spindle Khodjakov's figure Newt cell Microtubules-green Spindle poles-magenta Chromosomes-blue Kinetochores-yellow Keratin-red Kwon and Scholey Trends Cell Biol 14 194 2004 Multiple parts of the spindle are involved in stochastic, yet robust and predictable ‘dance’ Force-balance model; Motors switch on and off at times that are tightly regulated General principles of design: Robustness Redundancy Robustness, Open system, consuming lots of energy Multi-objective optimization: speed and accuracy Inter-connectedness, impermanence What is the spindle made from: microtubules (MTs) Dynamic instability: switching between phases of growth p g and shrinkage 8 nm 10 25 nm GDP MT length (miccron) M GTP 9 8 7 6 5 4 3 2 0 1000 2000 3000 Time [s] 4000 5000 Δx c r Probability that there is a growing MT at x Δp+ ( x) = v+ Δt [ p+ ( x − v+ Δt ) − p+ ( x)] − cΔt ⋅ p+ ( x) + r Δt ⋅ p− ( x) v+ Δt Δp− ( x) = v− Δt [ p− ( x + v− Δt ) − p− ( x)] + cΔt ⋅ p+ ( x) − r Δt ⋅ p− ( x) v− Δt x Δp+ ( x) p ( x) − p+ ( x − v+ Δt ) = −v+ + − c ⋅ p+ ( x) + r ⋅ p− ( x) Δt v+ Δt Δp− ( x) p+ ( x + v− Δt ) − p+ ( x) = +v− + c ⋅ p+ ( x) − r ⋅ p− ( x) Δt v− Δt ∂p+ ( x, t ) ∂p+ = −v+ ( x, t ) − cp+ ( x, t ) + rp− ( x, t ) ∂t ∂x ∂p− ( x, t ) ∂p− = v− ( x, t ) + cp+ ( x, t ) − rp− ( x, t ) ∂t ∂x p± ( x) = P± exp [ − x / l ] ∂p+ ( x, t ) ∂p− ( x, t ) = = 0, ∂t ∂t dpp+ ⎧ − v 0 ⎪⎪ + dx − cp+ + rp− = 0, ⎨ ⎪v dp− + cp − rp = 0, + − ⎪⎩ − dx ⎧⎛ v+ ⎞ − c ⎟ P+ + rP− = 0 ⎪⎜ l ⎪⎝ ⎠ ⎨ ⎪cP − ⎛ v− + r ⎞ P = 0 ⎟ − ⎪⎩ + ⎜⎝ l ⎠ v− v+ l= , v− c > v+ r v− c − v+ r 1 P± 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 l 0 0.5 x 1 1.5 2 2.5 3 3.5 4 4.5 5 average growth per cycle y is less than average shortening per cycle v− v+ > r c l− > l+ What moves and generates forces on MTs: molecular motors F~ Karsenti et al Nat Cell Biol 8 1204 2006 gy ⎧ k BT / δ ~ 4 pN ⋅ nm / 8nm ~ 0.5 pN Energy ~⎨ Step ⎩ E ATP / δ ~ 80 pN ⋅ nm / 8nm ~ 10 pN Mechanochemical cycle 1 k2 k2 = k20 e − f δ / kBT k1 dp1 = − k1 p1 + k2 p2 dt dp2 = k1 p1 − k2 p2 dt p1 + p2 = 1 2 k1 p2 = k1 + k2 v = δ k2 p2 = δ k1k2 k1 + k2 = δ k1k20 k20 + k1e f δ / kBT Motor is characterized by the force-velocity relation v= δ k1k20 k + k1e 0 2 f δ / k BT ; k BT ≈ 4 pN ⋅ nm; δ ≈ 8nm; V,n/d 100 104 k1 ~ ; k2 ~ sec sec f pN f,pN G Group off S. S Block Bl k What motors do in the spindle: Karsenti et al Nat Cell Biol 8 1204 2006 Problem #1: Mitotic spindle self-assembly What is the optimal dynamic instability regime for the fastest search and capture? Search Capture Capture Mitchison & Kirschner, 1984-86 Mathematical analysis (Holy & Leibler, 1994) p – probability of a successful search ts– average time of a successful search tu– average time of an unsuccessful search τ - average search time q – prob. to grow in the right direction, ~ 1/3 p* - probability to grow to length d τ = pts + (1 − p) p(ts + tu ) + (1 − p ) 2 p (ts + 2tu ) + ... = ts + p << 1, τ ≈ l= Vg f cat tu , p = qp* , p* ~ e − d / l p , tu ≈ min(τ ) = 1− p tu p d /l l l le , τ≈ , Vg qVg de ~10 10 min at l = d qVg For Newt lung cell, distance between spindle i dl pole l and d chromosome, h d ~ 10 μm. Rescue frequency is very small, and average microtubule length, l ~ 10 μm. Growth rate,, Vg~ 10 μ μm/min. Time in prometaphase, τ ~ 10 min. Monte-Carlo simulations: optimal unbiased ‘Search and Capture’ is not fast enough Multiple chromosomes - greater time to capture: 1) Capture of the last chromosome corresponds t the to th longest l t search; h time ti ~ llogarithm ith off th the number of chromosomes. 2) Geometric effect: a few-fold increase. PNM ,1 ( t ≤ τ ) = 1 − PNM ,1 ( t > τ ) = 1 − ( P ( t > τ ) ) ( 1 − e − pτ / tu ) NM = 1 − e − pτ N M / tu , PNM , NK ( t ≤ τ ) = ( PNM ,1 ( t ≤ τ ) ) τ = Numerical experiment: τ = NK ( tu NM p = 1 − e − pτ N M / tu NM ) = NK tu ln N K ( N K = 92 : a few-fold increase) pN M ‘Search and Capture’ can be biased Odde Cur Biol 15 R328 2005 ∂A ∂B =D =0 ∂X ∂X ∂A ∂B X = 0 : −D =D =k ∂X ∂X 1 A = Aa A , T = t , X = D / px p ∂A ∂2 A =D − pA 2 ∂T ∂X ∂B ∂2B =D + pA ∂T ∂X 2 X = L:D ∂a =0 ∂a ∂ a ∂ x = 2 −a ∂a ∂t ∂x x = 0: = −λ ∂x k l = L / D / p 1, λ = A Dp x=l: 2 kinase RanGTP – a(x,t) RanGDP G – b(x,t) ( ) a = C1e x + C2 e − x C1el − C2 e − l ≈ C1el = 0 −C1 + C2 ≈ C2 = λ D ~ 10 μ m2 sec ,p~ phosphatase 0 x 1 , D / p ~ 3μ m sec A≈ ⎡ k X ⎤ exp ⎢ − ⎥ Dp D / p ⎥⎦ ⎢⎣ Optimal biased ‘Search and Capture’ is fast enough: Unbiased,, N=1000,, 250 Biased, N=1000 angle=2*pi*(rand(N)-0.5); le=zeros(size(angle)); vel=ones(size(angle)); % vectors for angles, angles lengths lengths, velocities s=ones(size(angle)); cat=cata*ones(size(angle)); % vector for gr/sh state and cat for k=1:10 % time loop le=le+vel*dt; % length update for j=1:N % MT loop x=le(j)*cos(angle(j)); y=le(j)*sin(angle(j)); % plus end coordinates if ((x-0 ((x-0.5) 5)^2+y^2)<0 2+y 2)<0.25 25 cat(j)=cata; else cat(j)=10*cata; cat(j)=10 cata; end % local cata freq if rand<cat(j)*s(j)*dt vel(j)= - vel(j); s(j)=0; end % catastrophe if le(j)<0 le(j)=0; vel(j)=1; s(j)=1; angle(j)=2*pi*(rand-0.5); end % rescue if (abs(x-xk1)<0.05 & abs(y-yk1)<0.05) vel(j)=0; s(j)=0; end % capture end end The model inspired two recent studies: Lenart et al, 2005: at large centrosome-chromosome distances, “Search&Capture” is nott efficient, ffi i t and d actin-myosin ti i “fishnet” mechanism works first Caudron et al, 2005: Ran gradients exist and bias microtubule asters The way to accelerate assembly: grow MTs from both the centrosome and chromosome Nedelec et al Cur Opin Cell Biol 2003 15 118 O’Connell and Khodjakov Journal of Cell Science 120, 1717, 2007 Goshima et al JCB 171 229 2005 Problem: merotelic attachments attachment number time of MTs number of KTs Ta ~ ( tu / pM ) ln K p ~ A / L2 tu ~ L / V unsuccessful probability search time of capture l r ne ne number of errors number of errors A ~ rl K-fiber area tc time to correct tc ne l r L3 ln K 1 tc ne + l (Ta + Tc ) ~ VMr l r Tc ~ V l r L Cimini, Wollman 2005-07