MATH 345: Assignment 6 Solutions Q1
advertisement

MATH 345: Assignment 6 Solutions
Q1
Choose three different initial values x0 = 0, x0 = 1/2 and x0 = 2. If we take these initial conditions
√
and apply the map xn+1 = xn , that we get the following results (rounded to 4 decimal places).
x1
x2
x3
x0
0
0
0
0
0.5 0.7071 0.8409 0.9170
2 1.4142 1.1892 1.0905
If we were to continue this table we would find that the iterates beginning with x0 6= 0 converge
to 1.
(i)
From our calculator experiment hypothesize
that the fixed points are x∗ = 0 and x∗ = 1. To show
√
this we must solve the equation: x∗ = x∗ , x∗ ≥ 0. Solving this yields the two solutions x∗ = 0, 1
as expected.
(ii)
Linear stability analysis: evaluate f 0 (x) =
µ = f 0 (0) is undefined
1
µ = f 0 (1) = , |µ| < 1
2
d √
x
dx
=
1
√
2 x
at the fixed points.
⇒
standard analysis fails here
⇒
x∗ = 1 is a stable fixed point
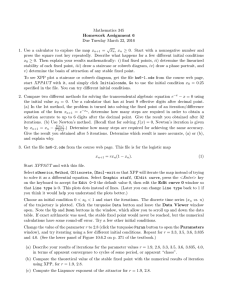
(iii), (iv)
Figure 1: Left: Staircase diagram. Right: Phase portrait
(v)
The basin of attraction for the fixed point x∗ = 1 is (0, ∞).
1
Q2
(a) 26 iterations required. After 32 iterations: x32 = 0.567143281, the last few digits are still
changing.
(b) 3 iterations. After 5 iterations: x5 = 0.567143290. Result here in (b) should be more accurate
since the map is superstable and that after 5 iterations all the digits remain unchanged, indicating
that all the digits that show up are accurate.
Q3
xn+1 = rxn (1 − xn )
(1)
(a)
Description of iterations
Iterates appear to converge monotonically to a fixed value, x ≈ 0.4736842
Iterates appear to converge in an alternating fashion to a fixed value, x ≈ 0.6428571
Iterates appear to converge to a 2-cycle with points: x ≈ 0.479427 → 0.8236033 → (repeat).
Iterates appear to converge to a 4-cycle with points, x ≈ 0.8749973 → 0.3828197 →
0.8269407 → 0.5008842 → (repeat).
3.6 Iterates appear to be choatic; do not appear to converge to anything.
3.835 Iterates appear to converge to a 3-cycle with points: x ≈ 0.9586346 → 0.1520743 →
0.4945144 → (repeat)
4.0 Iterates appear to be choatic; do not appear to converge to anything.
r
1.9
2.8
3.3
3.5
(b)
To get the fixed point, x∗ , solve the equation x∗ = rx∗ (1 − x∗ ).
1
∗
∗
∗
x ((1 − r) + rx ) = 0 ⇒ x = 0, 1 −
r
1
Therefore when r = 1.9, x∗ = 1 − 1.9
≈ 0.47368421 and when r = 2.8, x∗ = 1 −
0.642857142. There is agreement with the results from XPP and the theory.
(c)
From the lectures, the Lyapunov exponent for a fixed point x∗ is λ = ln |f 0 (x∗ )|.
f (x) = rx(1 − x), ⇒ f 0 (x) = r − 2rx = r(1 − 2x), ⇒ λ = ln |r(1 − 2x)|
The Lyapunov exponents are as follows for the fixed points
1
,
r = 1.9, x∗ = 1 −
1.9
1
r = 2.8, x∗ = 1 −
,
2.8
1
≈ −2.302585
λ = ln 1.9 1 − 2 1 −
1.9 1
≈ −0.223144
λ = ln 2.8 1 − 2 1 −
2.8 2
1
2.8
≈
(d)
1
, XPP computes the Lyapunov exponent to be λ = −2.32187
For r = 1.9, x∗ = 1 − 1.9
1
∗
For r = 2.8, x = 1 − 2.8 , XPP computes the Lyapunov exponent to be λ = −0.22315
The results from XPP are reasonably accurate, within 1%.
(e)
For r = 3.3, compare XPP results for stable 2-cycle. {p, q}, where p, q are given by:
p
r + 1 ± (r − 3)(r + 1)
= 0.4794270, 0.8236033
p, q =
2r
(This solution is obtained by using the fact that p = f (f (p)) for a 2-cycle, leading to a quartic
equation and realizing that x = 0, 1 − 1r are solutions to that equation and can be factored out,
since they are fixed points)
Lyapunov exponent: For a period 2-cycle, {p, q}, if x0 = p then x1 = q, x2 = p, x3 = q, ...
n−1
X
ln |f 0 (xi )| = ln |f 0 (p)| + ln |f 0 (q)| + ln |f 0 (p)| + ln |f 0 (q)| + ...
i=0
(
=
n
ln |f 0 (p)| + n2 ln |f 0 (q)|
2
n−1
ln |f 0 (p)| + n−1
ln |f 0 (q)|
2
2
+ ln |f 0 (p)|
if n is even
if n is odd
Dividing by n and taking the limit as n → ∞, regardless of whether n is even or odd, or the
initial point is x0 = p or x0 = q, we get:
n−1
1X
1
1
λ = lim
ln |f 0 (xi )| = ln |f 0 (p)| + ln |f 0 (q)|
n→∞ n
2
2
i=0
1
1
ln |f 0 (0.4794270)| + ln |f 0 (0.8236033)|
2
2
= −0.6189372
=
Using XPP to compute the Lyapunov exponent gives λ = −0.619539, which is reasonably
accurate.
(f )
A superstable fixed point, x∗ , for the iteration
our case we have:
1
0
0
f (x) = f 1 −
=r 1−2+
r
xn+1 = f (xn ) is one that satisfies f 0 (x∗ ) = 0. In
2
r
= 2 − r = 0 iff r = 2 ⇒ x∗ =
1
2
Using XPP, convergence to x∗ = 12 = 0.5000000 when r = 2 does seem somewhat faster than
1
to x∗ = 1 − 1.9
= 0.4736842 when r = 1.9 (e.g. starting a distance 0.1 away from x∗ , convergence
takes about 8 iterations when r = 1.9, but only 4 when r = 2.) Using Maple with 20 digits,
starting at x0 = x∗ − 0.1, convergence take about 20 iterations when r = 1.9, only 5 when r = 2.
3
(g)
For r = 4 and x0 = 0, we have x1 = x2 = x3 = 0, ..., so λ = ln |f 0 (0)| = ln 4.
x0 = 0 is not a typical initial value, since λ(x0 = 0) 6= ln 2.
x0 = 1 is not a typical initial value, since x1 = 0, x2 = 0, ...
x0 = 21 is not a typical initial value, since x1 = 1, x2 = 0, x3 = 0, ...
Any orbit that eventually contains xn = 0 for some n is not typical, since all further iterations of
that point will be zero and λ = ln 4 6= ln 2
Starting with x0 = 0.1, 0.2, 0.3, XPP computes λ = 0.700871, 0.699009, 0.659690 respectively, all
of which are reasonably close to ln 2 ≈ 0.693
Q4
2
(a) The fixed points are obtained by solving x = f (x)
√ = x(r − x ). We find immediately that
the fixed point xs = 0 exists for all r and xs = ± r − 1 exist for r > 1.
(b) The stability is determined by the magnitude of multiplier λ = f 0 (xs ) = r − 3x2s . Since
|f 0 (0)| = |r|, the fixed point xs = 0 is table for |r| < 1 or −1 < r < 1.
√
For the two fixed points xs = ± r − 1, |f 0 (xs )| = |r − 3(r − 1)| = |3 − 2r|. Thus, they are
stable for 1 < r < 2. For r > 2, they are both unstable.
(c) The period-2 cycles are roots of x = f 2 (x) = x(r − x2 )[r − x2 (r − x2 )2 ] ⇒ x[r2 − 1 − r(r2 +
1)x2 + 3r2 x4 − 3rx6 + x8 ] = 0.
On the other hand, if we expand the lhs of the equation x(x2 −r+1)(x2 −r−1)(x4 −rx2 +1) = 0
we also obtain x[((x2 −r)2 −1)(x4 −rx2 +1)] = (x[r2 −1−r(r2 +1)x2 +3r2 x4 −3rx6 +x8 ] = 0.
This is identical to the expression obtained from x = f 2 (x).
√
Therefore, the roots that differ from the fixed
s = 0, ± r − 1 expressed in pairs of
√ points x√
p, q (f (p) = q, f (q) = p) are: (i) {p, q} = { r + 1, − r + 1} thatsexists for r > −1sand bir
r
r
r2
r
r2
furcates from the critical point at (xs , rc ) = (0, −1), (ii) {p, q} = {
+
− 1,
−
− 1 },
2
4
2
4
s
s
r
r
r
r2
r
r2
and (iii) {p, q} = { −
+
− 1, −
−
− 1 }. (ii) and (iii) exist for r > 2 and
2
4
2
4
both are bifurcated from the bifurcation points (xs rc ) = (±1, 2). They are symmetrical and
should have identical stability property (i.e. they become unstable at the same value of r).
(d) The stability of the period-2 cycles are determined by the magnitude of multiplier λ =
f 0 (p)f 0 (q).
The the period cycle (i), λ = f 0 (p)f 0 (q) = (r − 3p2 )(r − 3q 2 ) = (r − 3(r + 1))2 = (2r + 3)2
which is larger than 1 for all r > −1. Therefore, (i) is unstable for the whole domain of
4
values of r in which it exists.
The stability for (ii) and (iii) are identical. Thus, we only need
r to study one of
rthem, say
2
r
r
r2
r
− 1][− − 3
− 1] =
(ii). In this case, λ = f 0 (p)f 0 (q) = (r − 3p2 )(r − 3q 2 ) = [− + 3
2
4
2
4
√
r2
r2
− 9( − 1) = −2r2 + 9. Note that |9 − 2r2 | < 1 for 2 < r < 5, (ii) and (iii) are stable.
4
4√
For r > 5, they both become unstable.
(e) See Fig. 4e.
(Fig. 4e)
x
1
r
−2
−1
1
2 5
3
−1
Blue = fixed point branches
Brown = period 2 cycle branches
stable
unstable
(f) See Fig. 4f.
1
0.5
0
-0.5
-1
-1
-0.5
0
0.5
1
1.5
(Fig. 4f)
(g) See Fig. 4g.
5
2
2.5
3
1
0.5
0
-0.5
-1
2
2.2
2.4
2.6
2.8
(Fig. 4g)
(h) See Fig. 4h.
0.61
0.6
0.59
0.58
0.57
0.56
0.55
2.836
2.838
2.84
2.842
2.844
(Fig. 4h)
(i) Results using x0 = 1.175 and x0 = 3 are given below.
1
1
x_0=3
x_0=1.175
0.5
x
0.5
x
0
-0.5
0
-0.5
-1
-1
-1
-0.5
0
0.5
1
1.5
2
2.5
3
-1
r
-0.5
0
0.5
1
r
6
1.5
2
2.5
3
The bifurcation
√ in (e) shows that there exists a pair of unstable 2-cycle solution:
√ diagram
{p, q} = {− r + 1, r + 1} that is unstable for all values of r > −1.√Notice also that the
crossing
points between f (x) = rx − x3 and y = −x are identically ± r + 1. When r = 3,
√
± r + 1 = ±2 which are exactly the same as the local max and local min values of the
function f (x) = rx − x3 at r = 3.
√
√
Therefore, for r ∈ [−1, 3] the interval Ir = [− r + 1, r + 1] defines an invariant interval
for the map at parameter r in the sense that
f (Ir ) ⊆ Ir .
While it is safe to use initial points x0 ∈ Ir to guarantee that the iteration does not diverge
outside of Ir . For initial conditions outside of Ir , convergence is not guaranteed. For r = 3,
this interval is
I3 = [−2, 2].
x0 = 3 is outside of this interval.
7