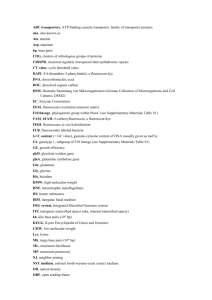
Freezing Melting ice liquid
advertisement

Freezing
liquid
u2
II
Melting
ice
u1
T = Ts
liquid
u1
Tl
I
ice
u2
I
II
Moving boundary problems
Heat equation (with convection) with phase change
For melting:
(I) Liquid:
(k1 u1x )x = ρ1 c1 u1t +
ρ1 c1 νu1x
|
{z
}
possible convection
ν = bulk velocity
(II) Solid
(k2 u2x )x = ρ2 c2 u2t
Initial condition u1 = u2 = T0 at t = 0
For t > 0, conditions for melting or freezing
freezing
u1 = Ts on boundary
melting
u1 = T` on boundary
(u1 = temp of solid)
(u1 = temp of liquid)
u1 = u2 = Tf (fusion temperature at interface), at x = X(t)
The location of the interface X(t) changes in time
X(t) is an unknown in the problem.
ν = convection in fluid as a result of volume change (melting/freezing)
The change of volume at the interface = A∆X
⇒ Aν∆T = V2 − V1 = m
⇒ν = 1−
I
conduction
heat out
∆x
ρ2
ρ1
1
ρ2
−
1
ρ1
dX
dt
i
mass is
constant
In many cases, assume ρ2 = ρ1 (or ρ2 ≈
ρ1 ) ⇒ no convection
One more condition is necessary, to determine X(t)
Energy balance at X(t)
II
conduction
heat in
h
x
∂u1
∂u2
−k1
+ k2
∂x {z
∂x}
|
heat transfer/unit time
∆t
In a volume of ∆X
∆t = m`
mass ·
latent heat
dX
from
⇐
solid to liquid
dt
dX
from liquid
[−k1 u1x + k2 u2x ] = −ρ1 `
⇐
to solid
dt
[−k1 u1x + k2 u2x ] = ρ2 `
62
!
So
−k1
∂u2
∂u1
+ k2
=
∂x
∂x
±ρ2,1
`X 0 (t)
(` = latent heat)
| {z }
+(melting)
−(freezing)
In most of what we do we take ρ2 = ρ1
Then the system of equations is (with const. coeff’s)
0 < x ≤ X(t)
D1 u1xx = u1t
D2 u2xx = u2t
at the
interface
(
Dj = kj /ρj cj
x > X(t)
u1 = u2 = Tf at x = X(t)
−k1 u1x + k2 u2x = ±ρ`X 0 (t) at x = X(t)
+ i.c.’s & b.c.’s
Note: this problem is nonlinear!
To see this, consider first the interface condition at x = X(t)
0=
du
dTf
=
dt
dt
=
⇒
∂u ∂x ∂u
+
at x = X(t)
∂x ∂t
∂t
∂u
∂X
∂t
=−
∂u
∂t
∂x
Now substitute in second interface condition
u1x [−k1 u1x + k2 u2x ] = ∓ρ`u1t
nonlinear!
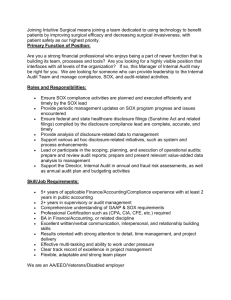
Constant coeff, Neumann problem (freezing)
D2 u2xx = u2t
D1 u1xx = u1t
u1 = u 2 = T 0
t>0
lim u2 = T0
x→∞
T0
I
II
t=0
u1 = Ts at x = 0
u1 = u2 = Tf at x = X(t)
k1 u1x − k2 u2x = ρ`X 0 (t), ` = latent heat
We know we can convert the pde to an
ode using similarity transformation for
diffusion (heat) equations
u2
Tf
Ts
u1
X(t)
Let z = c √xt in region II
u1x
c2
c
c x
u1z √ , u1xx = u1zz , ut = −u1z 3/2
t
2
t
t
1
c
1
[D1 c2 u1zz ] = − u1z z
⇒
t
t
2
=
63
x
Let c =
√1
2 D1
u1z = e−z
⇒ u1zz + 2zu1z = 0
2
u1 = C 1
to satisfy u1 = Ts at x = 0 (z = 0)
u 1 = C1
Z
Z
z
0
2
e−z dz + C2
02
e−z dz 0 + Ts
Similarly, for u2 , let
Z
ξ
x
ξ= √ √
u2 = E 1
2 D2 t
u → T0 as ξ → ∞ (x → ∞)
u2 = T 0 − E 1
Z
∞
ξ
02
e−ξ dξ 0 + E2
02
e−ξ dξ 0
At the interface:
T0 − E 1
u2x |x=X
u1x |x=X
Note,
Z
∞
2
√X
D2
e
−ξ
02
0
dξ = C1
√
t
2
1
− X
= E1 √
e 4D2 t
2 D2 t
2
1
− X
= C1 √
e 4D1 t
2 D1 t
Z
2
√X
D1 t
0
02
e−z dz 0 + Ts = Tf
k1 u1x − k2 u2x = ρ`X 0 (t)
X
√
2 tD
appears in both condi√
tions: This suggests, take X = |{z}
2K tD1
⇒ C1
Z
K
0
E1
q
02
e−z dz 0 = −Ts + Tf
Z∞
02
e−ξ dξ 0 = T0 − Tf
D1
K
D2
2
2
−
p
k1 (Tf − Ts )e−K
k (T0 − Tf )e−K D1 /D2
√2
+
= ρ`K D1
√
RK
02
∞
R
0
2 D2
2 D1 0 e−z dz
e−ξ 2 dξ 0
Finally,
q
D1
D2
Tf − T s
u1 = T s + R K
−z 2 dz
0 e
Z
2
√x
0
Z∞
T0 − T f
u2 = T 0 −
q
R∞
D1
D2
e−z 2 dz
K
64
D1 t
2
√x
D2 t
2
e−z dz
2
e−z dz
Equation
for
K
⇒ determines
behavior of √
interface
(const. t)
increases as Tf − Ts ↑
X(t)
decreases as T0 − Tf ↑
X0
t
Note: Similarly solutions do not always work!
e.g. for finite domains, varying media, 2 phases present initially and b.c. of different
forms, can not use similarity solution
Stefan problem
Simplified version - (without similarity solutions)
In the previous problem, some simplications occur for T 0 ∼ Tf
Then u2 ∼ T0
(E1 = 0) and we solve the equation only for solid
T0 − T s
u1 ∼ T s + R K
0
Equation for K:
e−z 2 dz
Z
2
√x
D1 t
0
2
e−z dz
2
p
k1 (Tf − Ts )e−K
= ρ`K D1
√ R K −z 2
2 D1 0 e dz
For water: Tf − Ts is small
⇒
use Taylor series expansion for
⇒ K 2 ∝ Tf − Ts
⇒
Z
K
0
2
e−z dz ∼ 0 + K
slow movement for small Tf − Ts
For time-varying media, and Tf −Ts 1, we can use a similar approach (Lunardini,
1981).
Consider the problem with convection, two-phase initial condition, melting problem. Here we neglect the variation in the solid region.
liquid
X(0) = X0 6= 0
solid
Equation for liquid:
u1
X
D1 u1xx = u1t + (1 −
u2
ρ2
0
ρ1 )X (t)u1x
u1 (x, 0) = T0 , u1 (X, t) = Tf ,
u1 (0, t) = Ts
−k1 u1x = ρ1 `X 0 (t) at x = X
Now we nondimensionalize to simplify, and indicate
the small parameter ST (Stefan number), related to Tf − Ts
65
u1 − T 0
X
D1 t
x
, θ=
ξ=
τ= 2
X0
Ts − T f
X0
X0
1
u1x = θy
(Ts − Tf )
X0
D1
D1
u1t = θτ 2 (Ts − Tf ), Xt = ξτ 2 X0
X
X0
0
D1
D1
D1
ρ2
⇒ θyy
(Ts − Tf ) = θτ 2 (Ts − Tf ) + (1 − )ξτ θy 2 · (Ts − Tf )
2
X0
X0
ρ1
X0
ρ2
⇒ θyy = θτ + (1 − )ξτ θy
ρ1
y=
Interface condition
D1
ξτ
X0
= −(Tf − Ts )θy |y=ξ
1 k
X0 ρ1 `
Substitute in θ equation
⇒ θyy = θτ + (1 − ρ2 /ρ1 )ST θy |y=ξ
c
(Tf − Ts )
`
≡
ξ(0) = 1, θ(y, 0) = 0,
Ts − T 0
≡ θs
θ(0, τ ) =
Ts − T f
k
=c
ST 1,
ρ1 D1
θ(ξ = 1, τ ) =
Tf − T 0
≡φ
Ts − T f
ST is the Stefan number.
Using a perturbation expansion in S T
θ ∼ θ 0 + S T θ1 + . . .
ξ ∼ ξ 0 + S T ξ1 + . . .
⇒ to leading order
ignore convection
to leading order ST 1
z
}|
{
ρ2
θ0yy = θ0τ +
(1 − )ST θ0y |y=ξ
ρ1
θ0 (y, 0) = 0, θ0 (0, τ ) = θs θ0 (1, τ ) = φ
At the interface: ξ0τ = −ST θ0 y|y=ξ
⇐
keep ST term otherwise we get only constant for ξ 0
The interface equation suggests the new time scale τ̂ = S T τ
=0
⇒
z }| {
θ0yy = ST θ0 τ̂ , neglect for ST 1
66
θ = θ(y, τ̂)
ξ0τ̂ = −θ0y |y=ξ
, θ(y, 0) = 0
θ(0, τ ) = θs
θ(ξ0 , τ ) = φ
ξ(0) = 1
Leading order approximation, θ0 is linear in y
θ0 = θ s −
ξ0τ̂ = +
ξ0 =
Note:
q
y
· (θs − 1)
ξ0
1
(θs − 1)
ξ0
θ0 (ξ0 , τ ) = φ0 = 1
φ=
| {z }
Tf − T 0
Ts + (Tf − Ts ) − T0
=
Ts − T 0
Ts − T 0
2(θs − 1)τ̂ + 1
θs − 1 =
Ts − T f
Tf − T 0
Ts − T 0
−
=
=φ
Ts − T f
Ts − T f
Ts − T f
Other problems where similarity solutions work:
(diffusivity)
When thermal conductivity varies linearly with temperature we can also use
similarity solutions:
I
x = X(t)
II
equations:
solid liquid
0 < x < X(t)
u1t = (D1 u1x )x
ρ1
x > X(t)
u2t + (1 − )Xt u2x = (D2 u1x )x
ρ2
u1 − T s
D1 = D01 1 + β1
T − Ts
0
u2 − T s
D2 = D02 1 + β2
T0 − T s
If we again make the transformation
z = √xt
√
X = 2λ D01 t
c x
c
⇒ u1x = u1z √ u1t = − 3/2 u1
2t
t
2
u1 − T s
c
z
1 + β1
D01
u1z
⇒ − u1z =
2t
T0 − T s
z t
Let c =
√1
,
2 D01
θ1 =
u1 −Ts
T0 −Ts
⇒ −2zθ1z = ((1 + β1 θ1 )θ1z )z
67
Note, when β = 0, we’re back to the Neumann problem, and the solution was in
terms of error functions. Here we define the modified error function, call it φ 1 , which
satisfies
((1 + β1 φ1 )φ1 z )z + 2zφ1z = 0
with φ1 (0) = 0, then
⇒ u 1 = T s + C 1 φ1
x
√
2 D01 t
θ1 = 0 at
u1 = Ts at x = 0
· (T0 − Ts )
We can even solve for C1 ,
√
Since u1 = Tf at x = X(t) = 2λ D01 t
Then Tf = Ts + T0 − Ts C1 φ(λ)
x
φ1 2√D t
Tf − T s
01
⇒ C1 =
⇒ u1 = Ts + (Tf − Ts )
(T0 − Ts )φ(λ)
φ1 (λ)
We still have to determine λ from the interface condition
Similarly, for u2 :
x
Let ζ = d √ , substitute for X(t)
t
. √
u2ζ
ρ1 2 λ D01 d
u2 − T s
d2
√ u2ζ =
+ (1 − ) . √
D02
−ζ
u2ζ 1 + β2
2t
ρ2
t
T0 − T s ζ
t
2 t
Let
u2 −Ts
T0 −Ts
= θ2 , d =
√1
2 D02
ρ1
⇒ 2 1−
ρ2
p
λ D01 d − 2ζ θ2ζ = ((1 + β2 θ2 )θ2ζ )ζ
Again we have an ode, with λ as a constant.
Let the solution be φ2 , with φ2 → 1 as ζ → ∞
Then
(θ2 → 1 as u2 → T0 )
and as x → ∞
θ2 = 1 − C2 (1 − φ2 (ζ))
Note: We can also write the equation for φ 2 in the same form as the equation
for φ1 .
p
ρ1
)(λ D01 d) − ζ
ρ2
= [(1 + β2 θ2 )θ2y ]y
Let − y = (1 −
⇒ −2yθ2y
68
and
u2 = (T0 − Ts )θ2 + Ts
At the interface:
"
Tf = (T0 − Ts ) 1 − C2 1 − φ2
!!#
√
λ D01
√
+ Ts
D02
√
Once we have u2 , u1 , can get an equation for λ from X = 2λ D01 t, using the
interface condition.
√
ρ1 `λ D01
√
− k2 u2x =−
k1 u1x √
√
t
x=2λ D01 t
x=X(t)=2λ D01 t
We have to compute φ1 , φ2 , φ01 , φ02 for each possible value of λ and substitute to find
the root in the interface condition.
"
!#
√
(Tf − Ts )φ01 (λ) 1
k2
D
01
√
√
k1
−
(T0 − Ts )C2 φ02 λ √
φ1 (λ)
2 D01
2 D02
D02
p
= −ρ1 `λ D01
69