MCHNES 2015 Microwave Remote Sensing of Water ... Plant System
advertisement

-
Microwave Remote Sensing of Water in the Soil
Plant System
MCHNES
by
MASSACHUSETTS INSTITUTE
OF TECHNOLOGY
Alexandra Georges Konings
DEC 0 9 2015
S.B., Massachusetts Institute of Technology (2009)
M.S., Duke University (2011)
LIBRARIES
Submitted to the Department of Civil and Environmental Engineering
in partial fulfillment of the requirements for the degree of
Doctor of Philosphy
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
September 2015
Massachusetts Institute of Technology 2015. All rights reserved.
Signature redacted
Author .......................
Department of Civil and Environmental Engineering
August 13, 2015
Certified by.............Signature
redacted>.....
Dara Entekhabi
Bacardi and Stockholm Water Foundations Professor
Signature redactedThesis Supervisor
A ccepted by ...................
.................
Heidi M. Nepf
Donald and Martha Harleman Professor of Civil and Environmental
Engineering
Chair, Department Committee for Graduate Students
2
Microwave Remote Sensing of Water in the Soil - Plant
System
by
Alexandra Georges Konings
Submitted to the Department of Civil and Environmental Engineering
on August 13, 2015, in partial fulfillment of the
requirements for the degree of
Doctor of Philosphy
Abstract
Remotely sensed measurements made by radars or radiometers in the low microwave
frequency range are sensitive to soil moisture, soil roughness, and vegetation water
content. Measurements made at multiple polarizations can be used to determine additional ancillary parameters alongside the primary variable of interest. However, if
an attempt is made to retrieve too many parameters from too few measurements, the
resulting retrievals will contain high levels of noise. In this thesis, I introduce a framework to determine an upper bound on the number of geophysical parameters that can
be retrieved from remotely sensed measurements such as those made by microwave
instruments. The principles behind this framework, as well as the framework itself,
are then applied to derive two new ecohydrological variables: a) soil moisture profiles
across much of the root-zone and b) vegetation optical depth, which is proportional
to vegetation water content. For P-band observations, it is shown that soil moisture
variations with depth must be accounted for to prevent large forward modeling - and
thus retrieval - errors. A Tikhonov regularization approach is then introduced to allow
retrieval of soil moisture in several profile layers by using statistics on the expected
co-variation between soil moisture at different depths. The algorithm is tested using observations from the NASA Airborne Microwave Observatory of Subcanopy and
Subsurface (AirMOSS) Mission over the Harvard Forest in Western Massachusetts.
Additionally, at L-band, a multi-temporal algorithm is introduced to determine vegetation optical depth (VOD) alongside soil moisture. The multi-temporal approach
used reduces the chance of compensating errors between the two retrieved parameters
(soil moisture and vegetation optical depth), caused by small amounts of measurement noise. In several dry tropical ecosystems, the resulting VOD dataset is shown
to have opposite temporal behavior to coincident cross-polarized backscattering coefficients, an active microwave indicator of vegetation water content and scattering.
This possibly shows dry season bud-break or enduring litter presence in these regions.
Lastly, cross-polarized backscattering coefficients are used to test the hypothesis that
vegetation water refilling slows down under drought even at the ecosystem scale.
Evidence for this hypothesis is only found in the driest location tested.
3
Thesis Supervisor: Dara Entekhabi
Title: Bacardi and Stockholm Water Foundations Professor
4
Acknowledgments
This thesis was funded by an NSF Graduate Research Fellowship, a NASA Earth
and Space Science Fellowship, and the NASA AirMOSS and SMAP missions. I am
grateful to both NSF and NASA for funding my research.
Both this dissertation and much of my skill as a scientist and engineer is owed a
great debt to my advisor, Dara Entekhabi. I am exceedingly grateful for his technical
guidance and countless insightful comments and creative ideas. He has taught me
far more than is contained within these pages, and I consider it a proud moment
each time I catch myself thinking like he would (or adopting his speech mannerisms
accidentally). Aside from being a great guide technically, I am also grateful for his
general mentorship throughout these early steps of my academic career. Even when
our technical viewpoints were diametrically opposed, his support was unwavering. His
guidance was multiplied through countless travel opportunities enabling me to meet
and learn from others in the field. He is a source of inspiration both as a researcher
and as a human being, and it has been a joy to work with him on a personal level.
I am grateful to my committee members Richard Cuenca, Charlie Harvey, Mahta
Moghaddam, and Sassan Saatchi for their helpful comments, questions, and suggestions at various times during the completion of this work, as well as their patience
with the technical challenges and travel made necessary by a committee consisting of
such wide-flung members.
The Entekhabi Lab members (Kaighin McColl, Hamed Alemohammad, Dave
Whittleston, Parag Narvekar, Aldrich Castillo, and Siggi Magnusson) have contributed
to an unusually self-reliant, cohesive, and supportive group for which I am very grateful. Special thanks are due to Kaighin McColl and Hamed Alemohammad, with whom
I have enjoyed working on a variety of projects and exchanging countless conversations on the academic journey and the field of hydrology. Thanks also to the many
temporary visitors of the Entekhabi lab, especially Thomas Jagdhuber, Maria Piles,
and Mariette Vreugdenhil. It has been a great joy to work in such a collaborative
environment.
5
Gaby Katul from Duke University continues to be a wonderful mentor, whose technical prowess and kind are equally inspiring. My thanks also to Amilcare Porporato
and recent members of the Katul, Porporato, and Oren labs at Duke.
The community at the Parsons lab is truly unique. The inevitable ups and downs
of the research process over the last few years were transformed into a far more
exciting and enjoyable adventure because of the great community at the lab. Buoyed
by a joint resistance to leaks, repairs, and other facilities inconveniences, nothing
can stop the lab's community. This community could not have grown and survived
without the tireless work of Sheila Frankel and Jim Long. Sheila's tireless listening
ear and countless hours of advice (and entertainment) kept me from despair more
times than I like to acknowledge.
Thanks to my Parsons friends and their partners for making me smile every day
- Ruby Fu, Alison Hoyt, Irene Hu, Kyle Delwiche, Kelsey Boulanger, Dave Ridley,
Jen Nguyen, Ben Scandella, Kaighin McColl, Dave Whittleston, Fatima Hussain,
Jenn Apell, Anthony Carrasquillo, and so many other past and present Parsonites.
Vicki Murphy deserves thanks for happily and speedily dealing with all my financial
concerns no matter how complicated, including many interesting conversations and
invaluable insights into the byzantine world of the research grant system along the
way.
Thanks also to Joe Abel, Adam Bouland, and Ryan Lewis for being great friends
and for understanding the Parsons life through their partners. MIT S.B. holders have
a special outlook on the world, so thanks to Denise Ichinco, Apoorva Murarka, and
Knight Fu for always putting things in perspective for me and for the joy of their
camaraderie. Regularly going climbing kept me sane during the last few years of my
PhD - thanks to Ruby Fu, Ryan Lewis, Zach Shepherd, Kyle Peet, Kelly Daumit, Jess
Bryant, and other climbing partners for allowing me into the wonderful and addictive
world of climbing (and for not dropping me on belay!).
Last but not least, I would not have made been able to get anywhere near completing this journey without the endless support and love of my family. Ik hou van
jullie.
6
Contents
1
23
Introduction
1.1
The role of plant and soil water content in the global water, carbon,
23
1.2
Motivation for using microwave remote sensing . . . . . . . . . . . .
26
1.3
Introduction to microwave remote sensing
. . . . . . . . . . . . . .
27
1.4
Outline of the thesis
. . . . . . . . . . . . . . . . . . . . . . . . . .
30
.
.
How Many Parameters Can Be Maximally Estimated from a Set of
33
2.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
2.2
Degrees of information . . . . . . . . . . . . . . . . . . . . . . . . .
35
2.2.1
Definition of Degrees of Information DoI . . . . . . . . . . .
36
2.2.2
Dependence on the bin size parameter
. . . . . . . . . . . .
39
. . . . . . . . . . . . . . . . . . . . . . .
41
.
.
.
.
Measurements?
Example Dol calculations
2.4
Applications to particular remote sensing observations
. . . . . . .
44
2.5
C onclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
.
.
2.3
.
2
.
.
and energy cycles . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 The Effect of Variable Soil Moisture Profiles on P-band Backscatter 47
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
3.2
Forward M odel . . . ..
50
.
3.1
. . . . . . . . . . . . . . . . . . . . . .
.
..
3.2.1
Hydrologic modeling ....
3.2.2
Backscattering Coefficient Model ...
3.2.3
Application of Scattering Model at Vaira Ranch . . . . . . .
.......................
50
................
.
54
7
57
Behavior of Multi-layer Scattering . . . . . . . . . . . . . . . . . . .
59
3.4
Forward Modeling Error at Vaira Ranch
66
.
Layering Approaches . . . . . . . . . . . . . . . . . . . . . .
66
3.4.2
R esults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
.
.
3.4.1
Discussion and Conclusions
. . . . . . . . . . . . . . . . . . . . . .
71
The Use of Regularization for Improving Profile Soil Moisture Re-
77
4.1
Introduction . . . . . . . . . . . . . . . . .
77
4.2
Regularization Approach . . . . . . . . . .
81
4.2.1
Cost functions . ... . . . . . . . . .
81
4.2.2
Illustrative example . . . . . . . . .
82
4.5
.
.
.
4.3.1
Model description . . . . . . . . . .
86
4.3.2
Experiments performed . . . . . . .
87
4.3.3
Results . . . . . . . . . . . . . . . .
.
86
. . . . . .
. .
.
Application to AirMOSS observations at Harvard Forest
90
94
Derivation of regularization parameters using an OSSE
96
4.4.2
Comparison to in situ data . . . . . . . . . . . .
. . . . . . .
97
4.4.3
Comparison with landscape characteristics
. . .
. . . . . . .
99
. . . . . . .
107
Discussion and Conclusions
.
.
4.4.1
. . . . . . . . . . . . . . .
.
4.4
Observing System Simulation Experiment at Vaira Ranch.
.
4.3
.
trievals from P-Band Radar Measurements
.
4
. . . . . . . . . . . . . . .
.
3.5
.
3.3
5 Vegetation Optical Depth and Albedo Retrieval using Time Series
of Dual-polarized L-band Radiometer Observations
109
5.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
109
5.2
Algorithm Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.3
5.2.1
Classical retrieval approach
5.2.2
Timeseries motivation
. . . . . . . . . . . . . . . . . . .
112
. . . . . . . . . . . . . . . . . . . . . .
114
Algorithm Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
117
5.3.1
Moving window timeseries design . . . . . . . . . . . . . . . .
117
5.3.2
Albedo retrieval . . . . . . . . . . . . . . . . . . . . . . . . . .
119
8
121
5.4
M ethods . . . . . . . . . . . . . . . . . . . . . . . .
121
5.5
Datasets used . . . . . . ..
. . . . . . . . . . . . .
124
.
NCEP land surface temperatures and flags .
125
5.5.3
.
.
5.5.2
MODIS IGBP land cover . . . . . . . . . . .
125
5.5.4
MERRA-Land observation-corrected global pr
126
5.5.5
Water fraction . . . . . . . . . . . . . . . . .
126
R esults . . . . . . . . . . . . . . . . . . . . . . . . .
126
5.6.1
VOD retrievals
. . . . . . . . . . . . . . . .
126
5.6.2
Albedo retrievals . . . . . . . . . . . . . . .
130
5.6.3
k retrievals
132
.
.
.
.
.
.
124
Discussion and Conclusions
.
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . .
134
139
6.1
Introduction . . . . . . . . . . . . . .. . . . . . . . .
139
6.2
VOD and
.
140
6.3
Possible explanations . . . . . . . . . . . . . . . . .
144
6.3.1
Dry season bud break and leaf flushing . . .
144
6.3.2
Litter
. . . . . . . . . . . . . . . . . . . . .
147
Conclusions . . . . . . . . . . . . . . . . . . . . . .
147
are out of phase in several regions
.
.
.
YHV
.
On the Seasonal Behavior of Microwave Vegetation Indices
6.4
7
. . . . . . . . . . . .
.
6
Aquarius Level 2 data
.
5.7
5.5.1
.
5.6
Additional parameters
.
. . . . . . . . . . . .
5.3.3
Variations in Diurnal Canopy Water Content Refilling with Water
Stress
8
149
Introduction . . . . . . . . . . . . . . . . . . . . . . . .
7.2
Derivation of AM and PM VWC
7.3
Soil moisture dependence of diurnal variability of
7.4
Conclusions . . . . . . . . . . . . . . . . . . . . . . . .
.
7.1
.
. . . . . . . . . . . .
.
-
YHV -
. . . . . . . 149
. . . . . . .
151
- . . . . . . 152
. . . . . . .
156
Conclusions and Future Work
159
8.1
159
C onclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
8.2
Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
162
8.2.1
Root-zone soil moisture . . . . . . . . . . . . . . . . . . . . . .
162
8.2.2
Vegetation optical depth and water content
164
A Vegetation Parameters for Hydrologic Modeling
10
. . . . . . . . . .
169
List of Figures
2-1
Normalized total correlation C, between Aquarius Tbv and TbH as a
function of the bin sizes ATbV and ATbH. For large bin sizes relative
to the dynamic range of the variables, the C, suddenly drops when the
number of bins is so low that even the approximate shape of the joint
pmf is distorted by the wide bins. The black triangle corresponds to
the bin sizes recommended by Scott's rule. . . . . . . . . . . . . . . .
2-2
40
The marginal (top) and joint (bottom) probability density functions
(pdf) for observed vertically and horizontally-polarized brightness temperatures (Tbv and TbH, respectively) from the Aquarius satellite.
Note that the edges of the joint pdf tails extend beyond the region
shown; the figure is zoomed in for clarity.
3-1
. . . . . . . . . . . . . . .
42
Comparison between modeled soil moisture (black line) and Ameriflux
soil moisture observations (red dashed line) at 5 cm (top) and 10 cm
(bottom) depth over the 10 year simulation period used in this study.
3-2
52
Comparison between modeled latent heat flux (black line) and Ameriflux latent heat flux observations (red dashed line) over the 10 year
simulation period used in this study.
3-3
. . . . . . . . . . . . . . . . . .
52
Average simulated soil moisture profile at Vaira Ranch, CA during the
local dry season (June through November, black solid line) and wet
season (December to May, red dashed line). The gray and pink shaded
regions represent one standard deviation around the mean profile during the dry and wet season, respectively
11
. . . . . . . . . . . . . . . .
53
3-4
Seasonal evolution of simulated 'true' P-band backscattering coefficients at VV- (top) and HH-polarization (bottom) over the year 2001,
assuming an incidence angle of 30'. The soil roughness rms height
s=:0.02 m at the surface, while all subsurface layer are assumed to be
smooth.
3-5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .
59
Evolution of the penetration depth (in cm) over the ten years of simulation. Tick marks labeled with each year correspond to the first day of
that year. The inset shows the annual average cycle of the penetration
depth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-6
61
Example soil moisture profile simulated by the SHAW model (see Section 3.2.1), which has cHH = -24.9 dB and c-vv = -16.9
dB when
a 210-layer approximation to the full soil moisture profile is used in
the P-band backscattering model (at a 30' incidene angle and frequency of 430 MHz). The vertical lines are the equivalent halfspace
moistures that show the same HH-polarized backscattering coefficient
(red, dashed line) and the same VV-polarized backscattering coefficient (blue, dash-dotted line) under the same texture, roughness, and
sensing conditions. The roughness and sensing parameters used are
identical to those in Section 3.2.3. . . . . . . . . . . . . . . . . . . . .
3-7
63
Backscattering coefficients associated with a linear soil moisture profile
between various soil moisture values at the surface (z=0) and a value
of 0.40 at 30 cm depth (pink dash-dotted line). The bottom x-axis
indicates the value of soil moisture at the surface, while the top x-axis
labels indicate the average soil moisture over the top 30 cm associated
with each linearly varying profile. The black, red dashed, and blue
dotted lines represent backscattering coefficients associated with uniform, two-layer, and three-layer approximations to the linear profile,
respectively. The left plot shows the backscattering coefficients in the
VV-polarization, while the right shows the HH-polarization. Roughness and measurement parameters were the same as in Fig. 3-6.
12
. . .
65
3-8
Soil moisture variation with depth for an example profile. The dashed
horizontal lines represent the layer interfaces used in the equal layer
(left) and moisture-dependent (right) approaches. The solid horizontal
lines show the bottom of the depth the lowest layer is assumed to
represent. For the equal-layer approach (left) this is the time-averaged
penetration depth, while for the moisture-dependent approach (right)
it is the penetration depth associated with the specific profile. ....
3-9
68
Seasonal evolution of backscattering coefficients for different multilayer representations of the soil moisture profile. The top row shows
the backscatter at VV-(black line) and HH-polarization (red line) for a
210-layer representation of the soil moisture profile and is taken to represent the true backscatter. The bottom two rows show the difference
between the backscattering coefficients for different multi-layer representations and the true backscattering coefficients at VV-pol (middle
row) and HH-pol (bottom row). The black, red, and blue lines represent the differences for one-, three-, and five-layer representations,
respectively. For each panel, the interfaces between homogeneous layers are spaced at equal intervals in the left column, and are spaced
depending on the locations of maximum soil moisture gradients in the
right column. A measurement frequency of 430 MHz, incidence angle
of 300, and roughness rms-height of 2 cm are assumed.
. . . . . . . .
69
3-10 RMSE (left) and bias (right) for soil moisture profile representations
with different numbers of layers. Solid lines represent the error at VVpolarization, while dashed lines represent the error at HH-polarization.
Black lines refer to the error when layers are distributed so as to have
equal thickness, while red lines are for simulations in which the layer
thicknesses depend on the soil moisture profile. Throughout, a measurement frequency of 430 MHz, incidence angle of 300, and roughness
rms-height of 2 cm are assumed. . . . . . . . . . . . . . . . . . . . . .
13
70
4-1
Sample soil moisture profile derived from in situ measurements at Harvard Forest on February 4th, 2012 used to calculate the 'true' forward
backscatter of Fig. 4-2. The dashed line represents the average soil
moisture over two layers of 14 cm each; the optimal solution of a twolayer retrieval algorithm .
4-2
. . . . . . . . . . . . . . . . . . . . . . . .
84
Different. cost function components as a function of the top-layer and
bottom-layer soil moisture. In the top left panel, the objective function
without regularization (minimizing the squared normalized difference
between measurements and expected values) is shown, where the measurements are those expected for the profile shown in Figure 4-1. In
the bottom left panel, a pure regularization term is shown. The right
panel shows the sum of the two, with the regularization term weighted
by parameter A = 0.01. In each panel, the white square represents the
global minimum of the displayed quantity, while the pink square represents the optimal solution for the profile used to generate the simulated
m easurem ents.
4-3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
Timeseries of 'true' average soil moisture simulated by SHAW for each
of the four layers retrieved by the algorithms, i.e. the top six cm (black
solid line), 6-12 cm (red dotted line), 12-18 cm (blue dash-dotted line),
18-24 cm (green solid line).
4-4
. . . . . . . . . . . . . . . . . . . . . . .
88
Mean profile (left column) and inverse covariance matrix (right column) for the forward (top row) and alternative (bottom row) hydrologic m odel results.
4-5
. . . . . . . . . . . . . . . . . . . . . . . . . . .
90
Root-mean-square error of one year of simulated regularized retrievals
as a function of the regularization weight A at Vaira Ranch . . . . . .
14
91
4-6
Timeseries of the top-layer (0-6 cm) retrieved soil moisture using different retrieval algorithms. The red dotted line is the retrieved value
using a regularized cost function with four layers and the value of A
that corresponds to the global minimum. The blue dash-dotted line is
the top layer value for unregularized retrievals with the same number
of layers. The black line us the true average soil moisture over the top
six cm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-7
Timeseries of the true (black solid line) and retrieved soil moisture (red
dashed line) using regularization in each of the four retrieval layers.
4-8
4-9
92
.
93
used in the regularization for Harvard Forest . . . . . . . . . . . . . .
97
Mean profile (left column) and inverse covariance matrix (right column)
Root-mean-square error of one year of simulated regularized retrievals
as a function of the regularization weight A at Harvard Forest
. . . .
98
4-10 Average 7-cm soil moisture values across interpolated soil moisture profiles (left) used as ideal retrievals for the OSSE at Harvard Forest and
(right) values retrieved by the regularization algorithm with A = 10-2.1.
98
4-11 Top-layer (0-7 cm) regularized retrievals (red triangles) compared to
the range of in situ measurements (0-5 cm) across each AirMOSS pixel
with in situ observations. The black dot is the average of the in situ
measurements. Data from the October 15th, 2012 flight are shown on
the left, while the right figure shows data from October 18th, 2012.
. 100
4-12 Cumulative distribution of sand fraction, clay fraction, topographic
moisture index, elevation, and retrieved biomass for the entire Harvard Forest flight path (black line) and the 3 focus regions (red line),
respectively. The bottom right shows the distribution of land cover
type between the flight path and the focus regions (DF
deciduous
forest, EF = evergreen forest, MF = mixed forest, SL
shrubland,
GL = grassland, PS = pasture, and CR = cropland). . . . . . . . . . 101
15
4-13 Landscape characteristics of focus area 1 at the Harvard Forest. Top
row: sand fraction (left), clay fraction (center), and elevation (right).
Bottom row: land cover (left), retrieved aboveground biomass (center),
and topographic moisture index (right). The bottom two rows show
the retrieved soil moisture in the 0-7 cm (top left), 7-14 cm (top right),
14-21 cm (bottom left), and 21-28 cm layers, respectively.
. . . . . .
103
4-14 Landscape characteristics of focus area 2 at the Harvard Forest. Top
row: sand fraction (left), clay fraction (center), and elevation (right).
Bottom row: land cover (left), retrieved aboveground biomass (center),
and topographic moisture index (right). The bottom two rows show
the retrieved soil moisture in the 0-7 cm (top left), 7-14 cm (top right),
14-21 cm (bottom left), and 21-28 cm layers, respectively.
. . . . . .
104
4-15 Landscape characteristics of focus area 3 at the Harvard Forest. Top
row: sand fraction (left), clay fraction (center), and elevation (right).
Bottom row: land cover (left), retrieved aboveground biomass (center),
and topographic moisture index (right). The bottom two rows show
the retrieved soil moisture in the 0-7 cm (top left), 7-14 cm (top right),
14-21 cm (bottom left), and 21-28 cm layers, respectively.
. . . . . .
105
4-16 Boxplot of average 0 - 7 cm layer soil moisture retrieval for different
sand fraction classes. . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4-17 Boxplot of average 0 - 7 cm layer soil moisture retrieval for different
topographic moisture index classes (in m). . . . . . . . . . . . . . . . 106
16
5-1
Cost function J as a function of VOD and k for a sample set of observations (July 16th, 2012, for a pixel centered at 19.48'N, 103.531W
in Central Mexico). The 'true' solution of the cost function (without
noise added) is shown by a black dot. A small amount of simulated
noise is added to the observations, 0.005 for the H-pol and -0.002 for
the V-pol. The contours of the resulting noisy cost function are shown
as black lines. The noisy solution of the resulting cost function is shown
by a red triangle and is far away from the true solution. . . . . . . . .
5-2
Retrieval ratio of degrees of freedom for the different land uses and
varying number of dual-polarized observations . . . . . . . . . . . . .
5-3
116
119
Relative contribution of the vegetation canopy to the total brightness
temperature emitted at H-polarization, T""P"/T-H as a function of
albedo w and VOD. A value of k = 20 is assumed.
Results at V-
polarization are qualitatively similar (not shown). . . . . . . . . . . .
5-4
120
Global maps of mean MT-DCA (left) and LPRM (right) VOD retrievals for the three year period of this study. . . . . . . . . . . . . . 128
5-5
Time series of weekly mean MT-DCA VOD, LPRM VOD, and precipitation over focus pixels. Note the different axes scale for the Amazon
series.
5-6
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
129
Global maps of standard deviation of MT-DCA (left) and LPRM (right)
VOD retrievals for the three year period of this study. In both cases,
a 5-week moving average is first removed from the timeseries for each
pixel, so that the standard deviation primarily reflects high-frequency
variability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7
129
Joint density of Aquarius radiometer-derived vegetation optical depth
vs. scatterometer
c-HV
in linear units (left) and radar vegetation index
(right). All available combinations of active and passive measurements
(e.g. one at each location and time) were used. . . . . . . . . . . . . .
130
5-8
Global map of retrieved albedo
. . . . . . . . . . . . . . . . . . . . .
132
5-9
Mean difference between the two sets of k retrievals . . . . . . . . . .
133
17
5-10 Global maps of temporal mean k retrieval for Aquarius (left) and SMOS
(right) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
5-11 Time series of weekly mean MT-DCA k, LPRM k, and precipitation
over focus pixels. Note the different axes scale for the Amazon series.
6-1
Pearson correlation coefficient between
134
-HV and VOD for all global
pixels for which there are at least 50 valid weekly VOD retrievals in
three years.
6-2
Pearson correlation coefficient between
with
6-3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
RUHV-VOD
< -0.5.
and precipitation for pixels
. . . . . . . . . . . . . . . . . . . . . . . . .
142
Pearson correlation coefficient between VOD and precipitation for pixels with
RHV-VOD
<
-0.5.
. Black symbols represent the locations of
the pixels shown in Figure 6-4.
6-4
cTHV
. . . . . . . . . . . . . . . . . . . . .
142
Timeseries of rainfall and vegetation indices for P1 (top), P2 (center),
and P3 (bottom), respectively. The P1-P3 locations are marked in Figure 6-3. For each timeseries, the average weekly VOD (blue line), aTHV
in units of power (green line), EVI (red line), and rainfall (histogram)
are show n.
7-1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Locations with same-day morning and afternoon observations whose
footprints are less than 0.05' apart.
18
. . . . . . . . . . . . . . . . . .
153
7-2
Difference between AM and PM UHV (in dB) vs. radiometer-derived
AM soil moisture for the pixels in Figure 7-1 after filtering for dew and
interception. Errorbars on the differences are based on the Aquarius
Kp uncertainty estimates of the backscattering cross-sections, where
additive errors are assumed to be distributed normally with a standard deviation of Ko-PQ. The inset of each pixel shows the location
(country, center coordinates), dominant land-cover, Gini-Simpson index of land cover, and annual average rainfall, respectively. Pixels are
arranged in order of decreasing averaging rainfall. Pixels where less
than three samples remained after dew and interception filtering, or
where more than 0.05% of the covered land surface area was water, are
removed from this analysis.
7-3
. . . . . . . . . . . . . . . . . . . . . . .
155
Mean diurnal difference of JHV (AM - PM) across days without interception or dew formation (in dB) as a function of average annual
rainfall for each pixel.
. . . . . . . . . . . . . . . . . . . . . . . . . . 156
19
20
List of Tables
2.1
Dol for several examples . . . . . . . . . . . . . . . . . . . . . . . . .
43
3.1
Vegetation scattering parameters used
. . . . . . . . . . . . . . . . .
58
4.1
Soil parameters for different SHAW runs . . . . . . . . . . . . . . . .
89
4.2
Root-mean-square retrieval error for different algorithms
. . . . . . .
93
5.1
Target areas: name, location, dominant IGBP land cover type, and
coefficient of determination R 2 between time series of mean Aquarius
and SM OS k retrievals. . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2
122
Land cover variability of retrieved albedo w. Parameters for SMAP w
are obtained from O'Neill et al. (2012) . . . . . . . . . . . . . . . . .
A.1 Vegetation parameters used for hydrologic modeling
21
131
. . . . . . . . . 170
22
Chapter 1
Introduction
1.1
The role of plant and soil water content in the
global water, carbon, and energy cycles
Water on earth exists in a variety of states and storage components. Of these, by far
the largest by volume is the ocean, followed at some distance by water in ice caps and
glaciers (Bras, 1989). Together, these two components make up 97.35 % of the water
on earth. Water stored in the soil and vegetation water makes up less than 1% of the
remainder (Bras, 1989). Although the total volume of soil and vegetation water is
small, it has an important influence on the highly dynamic global fluxes that enable
life on earth.
Large-scale estimation of soil moisture has a variety of societal applications, including the potential for better drought prediction, flood forecasting, wildfire risk
management, irrigiation management, and predictions of disease transmission (e.g.
Entekhabi et al., 2010a).
The outsized influence of soil moisture is partially at-
tributable to its role in modulating the fluxes of water, carbon, and energy at the
land surface. Soil moisture influences recharge rates to groundwater (National Research Council, 2004), a critical component in our ability to determine at what rates
water can be withdrawn sustainabily from groundwater aquifers (or more likely, how
unsustainable current withdrawal rates are). Soil moisture influences the partitioning
23
of rainfall into infiltration and runoff, which can influence erosion and transport nutrients away from a site (Kinnell, 2010; Fiener et al., 2011). Soil moisture also exerts
a first-order control over the rates of transpiration and bare soil evaporation. Because
of the high latent heat of water, the evaporation of water from soil or plants uses a
significant fraction of the energy that arrives at the land surface. As a result, soil
moisture influences the partitioning of net radiation into the latent heat flux associated with evapotranspiration, and sensible heat fluxes into the atmosphere and into
the ground. As a result, soil moisture influences the local weather evolution and, if
large-scale free atmospheric conditions are favorable, can influence the development
of convective rainfall (e.g. Konings et al., 2010). Because of the strong memory of
soil moisture, this influence can extend to seasonal and even interannual timescales
(Koster et al., 2000; Koster, 2004). By modulating the amount of trnaspiration, soil
moisture anso has a key influence on carbon fluxes and plant health.
About 65 % of global evapotranspiration fluxes occur through plant transpiration (Jasechko et al., 2013; Good et al., 2015). Plant transpiration is modulated by
stomatal closure which depends not only on soil moisture but also on atmospheric
demand (e.g. atmospheric humidity and temperature and available radiation energy).
Plant behavior falls along a spectrum from anisohydric behavior - significant stomatal
closure in response to soil moisture limitations - to isohydric behavior, in which no
stomatal closure occurs under soil moisture limitations (Klein, 2014; Skelton et al.,
2015).
Limitations in available water not only reduce instantaneous transpiration
rates, but in the longer term can also lead to mortality . Since droughts are expected
to become more common under climate change (Ciais et al., 2013) and the habitats
of many plant species are already shifting (Kelly and Goulden, 2008; Loarie et al.,
2009), questions about plant responses to drought and plant mortality are more pressing than ever. However, the mechanisms underlying long-term vegetation response
to drought are still poorly understood (van der Molen et al., 2011; Breshears et al.,
2009). Depending on the type of drought, plants are at risk of xylem embolism if
sufficiently large gradients of water potential cannot be maintained, leading to hydraulic failure, or, if stomatal closure is too aggressive, carbon starvation due to the
24
reduced uptake of carbon when stomata are closed (Sperry and Love, 2015; Meir
et al., 2015; McDowell et al., 2008, 2011; Anderegg et al., 2012). Carbon starvation
may also increase plant vulnerability to insect attacks (Anderegg et al., 2015).
Predicting plant vulnerability to drought requires being able to predict transpiration across a drought or drydown period. Most current models of transpiration
are based on an analogy with electrical resistors in which stomatal closure affects
the resistance or (its inverse) conductance of the plant. The transpiration fluxes are
driven by the difference in vapor pressure between saturated interstitial spaces in
the stomata and the unsaturated humidity in the atmosphere, analogous to a voltage difference across a resistor (Campbell, 1985). The degree of isohydricity of the
plant species is then generally incorporated in the maximum stomatal resistance of
the plant. In doing so, these models' ability to represent variations in plant behavior
is limited to those cases where average variations in maximum stomatal conductance have been measured and specified a priori. This limits the ability of models
to represent species whose parameters are not well-studied. Furthermore, variations
in stomatal density, size, and closure amounts due to plant height (Novick et al.,
2004), nutrient availability (Ewers et al., 2001), and even origin (Bourne et al., 2015)
are routinely neglected. Such models also neglect the storage and hydraulic transport of water within the plant, which would correspond to a capacitor in the electric
circuit analogy. Nevertheless, plant (an)isohydry, and thus the response of transpiration to water limitations, have been shown to be related to hydraulic architecture
(Schultz, 2003; Martinez- Vilalta et al., 2014). Improved representation of hydraulic
architecture in transpiration and assimilation models (Bohrer et al., 2005) can lead
to improved prediction of species-specific responses of transpiration to disturbances
including drought and improved representation of the diurnal cycle of transpiration
and hysteresis (Ewers et al., 2007; Thomsen et al., 2013; Zhang et al., 2014; Matheny
et al., 2014; Kumagai, 2010). Progress in understanding how the processes that govern the flow and storage of water in the plant are related to their drought response is
limited by available knowledge and observations of relevant plant traits (Kattge et al.,
2011), and by the difficulty of observing plant water flow without destructive mea25
surements (as further detailed in Chapter 7). The availability of large-scale records
of vegetation water content would help to understand plant water dynamics.
The root-zone depth across which plant water uptake occurs depends on climate
and vegetation cover and often extends to one meter or more (Schenk and Jackson,
2002; Kleidon, 2004), or even to beyond the water table in the case of phreatophytes
(Orellana et al., 2012). Across this range, soil moisture varies with depth. These
depth variations can have significant effects on the total evapotranspiration ( Teuling
et al., 2006). Variations of soil moisture with depth are the result of the local inputs
of flow into and out of a profile, including infiltration of precipitation, root water
uptake profiles, subsurface lateral flow, and percolation below the zone of interest.
The resulting profile shape can vary dramatically depending on conditions and does
not have a consistent shape. While some correlation between depths and surface soil
moisture can be assimilated into a soil water balance model to provide information
about root-zone soil moisture (Galantowicz et al., 1999), the direct measurement of
root-zone soil moisture is preferred for studies of plant-water interactions
1.2
Motivation for using microwave remote sensing
Aside from depth-variations, soil moisture is also highly spatially variable laterally
(Famiglietti et al., 2008; Crow et al., 2012). Similarly, plant water content can vary
significantly within the plant canopy, and between plants. Indeed, the variables influencing plant water content can span 11 orders of magnitude or more (Katul et al.,
2007). As a result, large numbers of in situ measurements are needed to be able to
average over small scale variability and draw meaningful conclusions at the stand- or
ecosystem scale. Remote sensing of plant and soil water content naturally smoothes
over variability below these scales and allows orders of magnitude more measurements
to be taken than can be made by hand. Additionally, political and other logistical
issues related to the ease of setting up in situ measurements cause in situ observing
networks to be highly biased towards temperate climates (Robock et al., 2000; Schimel
et al., 2015), even though tropical and boreal ecosystems contribute a large percent26
age of global water and carbon fluxes (Schimel et al., 2015). Satellite-based remote
sensing measurements from low-earth orbits take global measurements and do not
suffer the same biases (although there might still be biases in parameter development
and validation efforts). Remotely sensed observations thus provide a promising avenue for the study of plant and soil moisture behavior across climates and ecosystem
types.
Remotely sensed observations of the land surface can be hindered by the presence
of cloud cover. Optical and near-infrared observations cannot observe the land surface
on cloudy days, potentially causing large seasonal biases and requiring aggregation
of multiple days of observation in order to ensure the availability of clear-sky observations. By contrast, measurements at microwave frequencies can penetrate through
the atmosphere with relatively limited sensitivity to cloud cover or atmospheric water
vapor profiles (Ulaby et al., 1986a). However, they are indirect measurements and
require a 'retrieval' to determine the variables of interest, i.e. soil moisture or plant
water content, from the observations.
1.3
Introduction to microwave remote sensing
Depending on the instrument used, microwave observations can be either actively
measured (as when a radar sends out electromagnetic waves and measures the amount
of scattering) or passively measured (as when a radiometer measures the natural graybody emission of the land surface) (Ulaby and Long, 2014). The two measurements
are related by the conservation of power,
er
rzl,
(1.1)
where ep is the emissivity of the land surface (measured by passive measurements)
and rp is the reflectivity (measured by active measurements). Each depends on the
polarization p - the direction the electromagnetic wave is oscillating in, and the incidence angle Oi (Staelin et al., 1998). The ep and rp also depend on the dielectric
27
constant E of the emitting or reflecting surface. For non-homogeneous materials such
as soils or plants, the dielectric constant of the material is a weighted mixture of the
dielectric constant of the material's components. The dielectric constant of water is
much higher than that of other substances in the soil. This enables the potential
inversion of a measured dielectric constant for the relative amount of water, creating
the potential for remote sensing of soil moisture ( Ulaby et al., 1986a). The effective
dielectric constant of soil depends not only on the amount of water but also on the
soil texture - the soil particles also influence how tightly bound different components
of the soil water content are, and thus how they respond to an electromagnetic wave.
If soil textural properties are known, the dielectric constant at a given frequency can
be predicted from soil moisture using a dielectric mixing model ( Wang and Schmugge,
1980; Peplinski et al., 1995; Mironov et al., 2004).
The calculation of ep and rp for a smooth surface interface between the atmosphere
and a soil with effective dielectric constant is relatively well understood. However, soil
roughness and vegetation also affect the measurements. Soil roughness refers to the
small-scale (< cm) variations in the height of the soil surface. The effect of vegetation
cover on microwave observations depends on both the aboveground water content in
the plant and on its physical structure, i.e. the vegetation allometry. Although both
active and passive measurements have a similar sensitivity to soil moisture (Du et al.,
2000), they differ in how they are affected by soil roughness and vegetation. Radar
measurements generally require a more detailed characterization of roughness and
vegetation structural effects in order to allow accurate inversion for soil moisture or
vegetation water content. However, relative to radiometer measurements, they can
be made at much higher spatial resolution through the use of a synthetic aperture
(Van Zyl and Kim, 2011).
Soil roughness is generally modeled by assuming the height of the soil surface
is characterized (after detrending any larger-scale topographic slopes) by a random
process with a distribution based on the root-mean-square height and the lateral autocorrelation length ( Verhoest et al., 2008), although the latter is usually neglected in
the context of radiometry (Ulaby and Long, 2014). Vegetation affects microwave re28
mote sensing measurements through both a direct scattering contribution and through
so-called double-bounce scattering mechanisms in which waves scattered or emitted by
vegetation are re-scattered by the ground surface and vice versa. The total measured
backscattering coefficient aPQ is typically modeled as the sum of surface, doublebounce, and volume scattering components,
aOrP
=
oisurface +
PQPQ
double
+-volume
,1.2)
+pQ(12
+PQ
vertical) and
Q refers to the
receiving polarization. For most natural surfaces, UHV
UVH, so there are three possible polarizations, UHH, uvv, and UHV.
'
where the subscript P refers to the transmitted polarization (either horizontal or
A variety of
models exist for c-pQ, ranging from the simple and semi-empirical (e.g. Attema and
Ulaby, 1978; Oh et al., 1992) to complex representations of the scattering relying
on tens of parameters (e.g. Durden et al., 1989; Burgin et al., 2012). For passive
measurements, most retrieval approaches use the same first-order solution to the
radiative transfer equations, known as the tau-omega model:
TB,
= TS(1 -- rP)7 + TcI - WO -- 7)( + rp7).
(1.3)
Above, TB, is the brightness temperature at polarization p, which is either horizontal
(H) or vertical (V), T, and T, are the effective land surface and canopy temperatures,
respectively. The r, is the rough surface reflectivity, -y is the vegetation transmissivity, and w is the vegetation single-scattering albedo. Thus, the effect of plant water
content and scattering is accounted for through the two parameters W and '-. Numerous field campaigns and theoretical exercises have shown that -y can be represented
as (Jackson and Schmugge, 1991; Van De Griend and Wigneron, 2004)
y = exp
bVWC)
Cos 0
(1.4)
where b is a canopy-specific constant of proportionality, VWC is the total aboveground vegetation water content, and 0 is the incidence angle. Thus, from radiometric
29
measurements, the total vegetation water content VWC is a direct parameter of the
equations, while the total VWC is not always a direct parameter of radar scattering
models.
1.4
Outline of the thesis
From a single set of multi-polarized measurements, either three (in the case of active data) or two (in the case of passive data) measurements are made. However,
in order to account for the effects of soil roughness and vegetation as well as soil
moisture, there may be far more than three or two unknown parameters in the retrieval problem. If there are more unknowns than observations, the retrieval will be
overly sensitive to noise. When more than a single parameter is retrieved, even small
amounts of measurement noise or model imperfections can cause large and opposite
errors ('compensating errors') in multiple retrieval parameters. Chapter 2 of this thesis introduces a framework to calculate the maximum number of parameters that can
be independently estimated from a set of data even in the presence of duplicate information or correlation between the observations. Two different approaches are then
used to retrieve new datasets from microwave observations by changing the balance of
unknown parameters and 'degrees of information' in the measurements. In Chapter
3, I show that in order to accurately retrieve root-zone soil moisture, it is necessary
to account for the shape of the soil moisture profile, rather than retrieving only a
single average value. In Chapter 4, a regularization method is introduced to allow
the retrieval of soil moisture profiles from P-band radar data by providing additional
information about the relationship between profile layers based on prior hydrologic
expectations. A second new dataset of water at the land surface is determined in
Chapter 5, which uses L-band radiometer data to retrieve vegetation water constant
along with the effective scattering albedo and soil dielectric constant. In Chapter 6,
this dataset is compared to a coincident active vegetation index
cTHv
to determine the
differences and possible trade-offs between active and passive microwave vegetation
measurements. Lastly, Chapter 7 uses OHV data to study the response of the diurnal
30
variability of plant water content to seasonal drought.
31
32
Chapter 2
How Many Parameters Can Be
Maximally Estimated from a Set of
Measurements?
2.1
Introduction
Remotely sensed measurements using visible, microwave, or other spectral observations of geophysical parameters are generally not a direct observation of the quantity
of interest; the raw observations need to be converted to the geophysical variables in
the so-called retrieval process. In most applications, multiple geophysical parameters
influence the observations. These additional parameters may not be known. If so, it is
often advantageous to retrieve multiple parameters at once during a single inversion.
If multiple parameters are to be retrieved, however, additional measurements may be
needed. These may be obtained by increasing the types of measurements made, e.g.
using additional electromagnetic frequencies (spectral channels), or incidence angles
and polarizations in the case of radar or radiometers. The same measurement type
can also be repeated and combined, e.g. by using multiple observations over the same
pixel or multiple nearby pixels. Whatever the source of the additional data, the multiple observations are rarely completely independent. This is demonstrated by the
33
success of dimensionality-reduction methods in various areas of remote sensing, e.g.
Renard and Bourennane (2009); Licciardi et al. (2012); Guanter et al. (2012).
It is not possible to retrieve more unknown parameters than the number of measurements. If the set of measurements are strongly correlated, a simple integer count
of the number of measurements may be over-counting the number of unknowns that
can be retrieved. It is therefore necessary to be able to derive the (possibly fractional)
degrees of freedom that can be obtained by using a certain set of measurements, accounting for the duplicate information. Especially in the atmospheric sounding community, this is commonly done by decomposing the signal into a fractional 'degrees
of freedom of the signal' and 'degrees of freedom of the noise' using a method due to
Rodgers (2000). This method assumes the measurements are linearly related to the retrieval parameters. For many non-linear retrieval processes, a single linearization may
not be appropriate for use in designing an algorithm that is expected to be applied to
large regions, or even globally. Furthermore, Rodgers' method assumes that all errors
are additive and have a Gaussian distribution. Not all sources of error are additive
and Gaussian (for example, speckle noise in radar measurements is multiplicative, or
non-Gaussian when transformed to additive dB units), and error magnitudes may depend on ancillary variables whose global distribution is not Gaussian. The construct
of Rodgers' method limits it to Gaussian variables (since only the covariance is used
to characterize their probability densities) and an extension to the non-Gaussian case
is not possible. In this letter, we present an alternative methodology for those cases
when Rodgers' method is not appropriate. We introduce a framework that calculates
the maximum number of fractional degrees of freedom (here termed the degrees of
information) in a set of measurements. The calculation depends on the full probability density function of each of the contributing measurements rather than just their
covariance, and is thus expected to better capture the total amount of information in
the measurements. To do this, we propose the use of the normalized total correlation,
a generalization of the normalized mutual information. These information theoretic
measures are discussed in Section II.
Information theoretic concepts have found a wide variety of applications in remote
34
-PRM 10
sensing, e.g. (Gueguen et at., 2010; Erten et al., 2012; Cerra and Datcu, 2008; Cariou
et al., 2011; Hossain et al., 2014). Here, mutual information and its generalization is
used for a specific application in model selection: determining how many unknown
parameters can be maximally retrieved from a given dataset. The proposed method
is independent of, and does not attempt to influence, the exact choice of parameters
to be retrieved, only the number of parameters. Although similar information theoretic concepts (e.g. appropriately chosen combinations of joint and/or conditional
entropies) could be used to determine which parameters the observations provide the
most information about, the choice of retrieval parameters may be driven by diverse
scientific questions or other design factors. The framework presented therefore determines the maximum degrees of information in the data independently of which
particular parameters are to be retrieved or any particular retrieval algorithm. Indeed, it may not always be practical to introduce as many parameters as there are
degrees of information, but the method determines an upper bound.
This letter is organized as follows. In Section 2.2.1, the normalized total correlation is introduced and shown to be confined between 0 and N-1. The fractional
'degrees of information' contained in an N-dimensional observation set is linked to
the normalized mutual information. The degrees of information are dependent on the
precision of the measurements through a bin size parameter A, whose derivation is
discussed in Section 2.2.2. This derivation is illustrated with an an example using
microwave radiometer observations. Additional examples are described in Section 2.3.
Lastly, in Section 2.4, the application of the metric to a number of different common
measurement types in remote sensing is discussed. This latter section is meant to be
illustrative rather than exhaustive.
2.2
Degrees of information
If measurements are made of two independent random variables X and Y, they can
be used to retrieve two unknowns. The set of measurements can be said to contain
two 'degrees of information'. If a third measurement Z is added that can be perfectly
35
predicted from one of the other two random variables, the measurements still contain
only two degrees of information. In reality, it is more likely that X and Y are related
but not completely independent, and Z is similarly correlated to some degree with
either X and Y. Depending on how closely related the three variables are, there
could be enough information in the correlated random variables to retrieve either
one or two unknowns. Some measure of the total amount of information contained
in a set of measurements is therefore needed. The measure should be independent
of the nature of the relationship between the variables (i.e. not restricted to linear
relationships) and generalizable to an arbitrary number of dimensions (number of
measurement channels). The Degrees of Information DoI provides such a measure
and is introduced in Section 2.2.1. Section 2.2.2 discusses the bin size parameter
necessary to calculate DoI.
2.2.1
Definition of Degrees of Information Dol
The Shannon entropy, one of the central tenets of information theory, is the expected
value of the information content derived from a single observation of a discrete random
variable X. It can also be interpreted as the uncertainty of a variable ( Cover and
Thomas, 1991). The Shannon entropy can be expressed as
H (X) = Zp(x) log p(x),
(2.1)
where p(x) is the probability mass function (pmf) of X. If the random variable
has a narrow distribution, an observation will, on average, provide less information
than if it has a very broad distribution. The H(X) of a discrete random variable is
non-negative. For multiple variables Xi, the joint entropy is
H(X1,7 ...
,XN)
---..E1 --, XN) 109 P(X1i, ..,N). (2.2)
X1
XN
The individual p(X ) are referred to as the 'marginal probability mass functions' and
the individual H(X ) as the 'marginal entropy(ies)' of each product.
36
The mutual information is a well-known measure of the reduction in uncertainty
between independent and joint measurements of two random variables X and Y.
Mathematically, this can be written as,
I(X; Y) = E
p(x, y) log p(x)
.
(2.3)
By comparing the joint and marginal probability distributions, the mutual information quantifies the degree to which simultaneous consideration of the two variables
changes their distribution.- That is, it quantifies non-linearly how dependent the two
variables are. When X and Y are independent, I(X; Y) = 0. The I(X; Y) is maximized when X and Y are dependent (i.e. perfectly correlated). From the definitions,
it can easily be shown that
I(X; Y) = H(X) + H(Y) - H(X, Y).
(2.4)
For proofs of these and other information theoretic properties used in this section,
the reader is referred to an introductory information theory textbook, such as ( Cover
and Thomas, 1991).
Although a number of different generalizations of the mutual information exist,
the total correlation C (Watanabe, 1960) captures the amount of information shared
between any of the measurements in a set. Like the mutual information, the total
correlation is the Kullback-Leibler divergence between the joint and the marginal
entropies,
1, --- ,
-J,
-
N
, --, XN) dN... dxl
ogP(
109Nl
--P(XN
XX ..
(2.5)
)
C(X1,X 2, ... , XN) =
N
H(Xi) - H(X1 , . . , XN)
=
i=r1
37
(2.6)
We further define the normalized total correlation C,(X 1 , ... , XN) as
N
E H(Xj) - H(X1,7...,IXN)
Cn ..
X1i~n
-C(X1,
... XN)
H(X1, ... , XN)
-i=1(27
H(Xl, ... , XN)
To prove that Cn takes a value between 0 and N - 1, we use the basic property
that
N
H(Xl,..., XN)
H (Xi) => NH (X1,..., XN)Cn
(2.8)
0.
Since max(H(Xi)) < H(X1 , ... , XN), multiplying by N gives,
i
Furthermore, since
N max(H(Xi)) < NH(X1,,..., XN)
(2.9)
H(X,) < N max H(X,) by definition,
-N
ZH(Xi)
N
H(X,) < NH(X1,..XN)
H(X1, ... , XN)
- <=N
By inserting this into Equation (2.7), it becomes clear that Cn < N
(2.10)
-
1. The Cn
therefore takes a value between 0 and N-1. When the Xi are independent, C" = 0.
When they have a one-to-one relationship, Cn = N - 1.
The higher the normalized total correlation between the measurements, the less
information they contain. The total degrees of information between the Xi is then
given by
DoI = N - Cn(X1, ...
,XN)
(2.11)
Since additional measurements cannot remove information from a first one, DoI > 1.
Since, as mentioned above, mutual information and entropy are non-negative, DoI <
N. Thus, Dol E [1, N], as expected.
In the limit where C(X 1 , ... , XN) is maximized, H(X 1 ,
... ,
XN) = H(Xi) for all
i. Thus, it is possible to derive an alternative normalization using the minimum
H(Xi). The normalization with H(X1, ... XN) used here is chosen because it is more
38
conservative, since min(H(Xi)) < H(X 1 , ... , XN). Note that in two dimensions, Le
Hegarat-Mascle et al. (1997) calculated the mutual information between two remote
sensing images, but these were normalized by the entropy of one of the two images,
so that the resulting measure is not symmetric.
The properties above were derived based on the assumption that the Xi are discrete variables. In remote sensing, many measurements are continuous rather than
discrete.
For continuous variables, several of the above lemmas are false and mu-
tual information does not have an effective upper bound. Nevertheless, while remote
sensing measurements may appear to be continuous by taking on an arbitrarily large
number of values, the number of possible measurements is in practice limited by the
finite accuracy or precision of the instruments. That is, small fluctuations in measurements below some accuracy threshold do not provide any physical information.
For a certain bin size A, the continuous measurements can be binned into discrete
classes by rounding them to the nearest interval of A. The resulting constant-bin
histograms can be used directly to estimate the pmf's necessary to evaluate C".
2.2.2
Dependence on the bin size parameter
Using an inappropriate bin size A may introduce errors in the estimation of the
probability mass functions, and thus in the C, and Dol. If the bin size used is too
small, the frequency counts in the bins will be sensitive to noise fluctuations in the
dataset. If the bin size used is too large, the estimated marginal and joint pmfs may
mischaracterize (or even miss all together) certain peaks in the distribution. Several
different approaches have been proposed in the statistical literature to determine the
optimal bin width to accurately estimate the pmf with a finite sample. Among these,
Sturges' rule for calculating a bin width based on the range of the data and the
number of points is the oldest and the most common. It has been shown to work well
for applications of mutual information-based image registration (Legg et al., 2007)
and feature selection (Hacine-Gharbi et al., 2012). However, it is known to lead to
overly large bin size estimates that over-smooth the histogram, particularly for large
samples sizes (which are expected in remote sensing) ( Wand, 1997). It can also be
39
sensitive to outliers. A better approach is the so-called Scott's rule, which calculates
the bin size Ar? from the data's standard deviation ax, of the data instead of its
range:
Axi =
(2.12)
3,,
where n is the number of points in the sample. The dependence on ni/1
3
has been
shown to be optimal for minimizing LP error norms ( Wand, 1997).
The use of Scott's rule is illustrated using a two-dimensional example for ease of
visualization. Horizontally and vertically polarized measurements of L-band brightness temperatures (Tbv and TbH, respectively) from the Aquarius satellite are used
(Le Vine et al., 2007). The data span the period September 1, 2011 to August 31,
2012 over land and across the globe. Aquarius has three beams with three different
incidence angles; only the middle beam is used here. Figure 2-1 shows the bin sizedependence of the Ca(Tbv, TbH). Since the range and shape of the distribution is
similar between the two variables, it is not surprising that the dependence on
ATbv
and ATbH is approximately symmetric. Applying Scott's rule to each of the TbV and
TbH separately leads to two different bin sizes that can be used to determine C,.
C (Tbv, TbH)
0.3
0.2
0
0.1
0)
-2
-2
1
0
-1
0
)
log, (A Tb
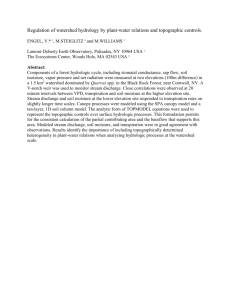
Figure 2-1: Normalized total correlation C, between Aquarius Tbv and TbH as a
function of the bin sizes ATbV and ATbH. For large bin sizes relative to the dynamic
range of the variables, the C, suddenly drops when the number of bins is so low that
even the approximate shape of the joint pmf is distorted by the wide bins. The black
triangle corresponds to the bin sizes recommended by Scott's rule.
40
The Cn(Tbv, TbH) = 1.13/7.87 = 0.14 at the optimum bin size. This is much
lower than the Pearson's correlation coefficient between the values, r = 0.92. The
joint pmf shown at the bottom of Figure 2-2 illustrates why. Although the shapes of
the marginal distributions are similar, the long tail in the joint pmfs adds a significant
amount of uncertainty between the two polarizations.
By contrast, it reduces the
Pearson correlation coefficient relatively little because most points fall on or near the
diagonal line. This demonstrates the value of non-parametric measures of the degrees
of freedom in measurements rather than relying on potentially misleading Gaussian
assumptions.
The resulting value of DoI = 2 - 0.14 = 1.86 allows calculation of the number of
overpasses that must be combined to calculate a certain number of parameters from
a multi-temporal timeseries using these data. Algorithms using dual-pol radiometric
data at L-band from N overpasses can retrieve a maximum of 1.86 x N parameters.
Any dependent information between observations at different times is due to autocorrelation in the physical properties to be retrieved, which is generally neglected in
the retrieval process. Thus, the Dof from a single set of dual-polarized measurements is multiplied by N. For example, combining data from two overpasses leads to
DOI2-pass
= 1.86(2) = 3.72, which is only enough information to robustly retrieve
3 parameters, even if 4 measurements are used (two polarizations on two overpasses
each). Indeed, a two-overpass timeseries algorithm can be applied to these data to
robustly retrieve three parameters for each pixel: a single constant vegetation optical
depth and the dielectric constant during both overpasses. Additional combinations
of overpass numbers and retrieved parameters are also possible, as also discussed in
Chapter 5.
2.3
Example Dol calculations
In this section, the degrees of information (DoI) calculation is illustrated for several
additional measurements. Table 2.1 shows the Cn(X1 , ... , XN) for several data sources
and compares different re-arrangements of the same timeseries. The examples of Table
41
0.03
.Tbv
. ... T b H
H
.
0.021
CL
0.01
C
250
200
Tb
300
P
p(TbvTbH)
x 10-
8
30
Y
I
0/
6
28
-Q
07
H
4
)
26
2
24
220
240
Tb
260
280
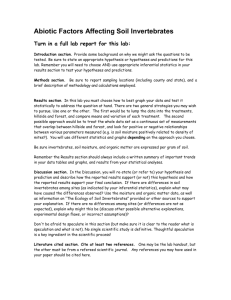
Figure 2-2: The marginal (top) and joint (bottom) probability density functions (pdf)
for observed vertically and horizontally-polarized brightness temperatures (Tbv and
TbH, respectively) from the Aquarius satellite. Note that the edges of the joint pdf
tails extend beyond the region shown; the figure is zoomed in for clarity.
42
2.1 are discussed one-by-one below.
Noisy linear relationship: We first consider the case of two linearly related timeseries of unit slope, e.g. Y = X, both distributed normally around 0 with standard
deviation 1.
The X and Y are jointly sampled, but are subject to independent
normally distributed noise with standard deviation 0.1 to produce series x and y.
The mutual information between them measures the respective dependence of variables based on their joint distributions. The addition of independent noise to all
values strongly reduces the amount of redundancy between the final measurements;
Cn(X, Y) = 0.21.
Aquarius multi-polarization backscattering data 0-HHc-vv, and
UHV:
Aquarius
makes coincident radar and radiometric measurements. There is a higher normalized total correlations between pairs of two co-polarized backscattering coefficients
(Cn(UHH, UVV) =
tering coefficients
0.28) than between a combination of co- and cross-polarized backscat(Cn(UHH, HV) =
0.19). This can be understood by noting that
the cross-polarized backscatter is essentially independent of the soil moisture, unlike
the co-polarized backscatter. Some total correlation remains because both the coand cross-polarized backscatters are sensitive to vegetation and soil roughness. A
set of cross and co-polarized data thus carries more information than two different
co-polarizations, as reflected in the higher Do. When adding a third polarization the
Dol increases by less than one, as expected from the non-zero Cn between all pairs
of polarizations. The total Cn increases when combining all three polarizations, suggesting the mutual information between different pairs of polarizations is in different
Table 2.1: Dol for several examples
Datasets
-OPt
Noisy linear
(0.10, 0.10)
(0.20 dB, 0.20
(0.20 dB, 0.30
(0.20 dB, 0.30
(0.20 dB, 0.20
(UHH, UVV)
(OHH, UHV)
(UVV, UHV)
(OHH, JVV, OHV)
(UVV, Tbv)
(TbV, TbH)
dB)
dB)
dB)
dB, 0.30 dB)
(0.20 dB,0.87 K)
(0.87 K, 0.81K)
43
N
2
2
2
2
3
Cn
0.21
0.28
0.19
0.18
0.40
Dol
1.79
1.72
1.81
1.82
2.60
2
2
0.03
0.14
1.97
1.86
parts of the pmf (e.g. different spatial regions or seasons). The total DoI is 2.60.
Aquarius multi-instrument data orvv and Tbv: Because radar and radiometric
measurements are affected differently by soil and vegetation scattering, the C, between coincident brightness temperature Tb, and backscattering coefficient
-vv data
is low, Cn(Tbv, -vv) = 0.03. Other combinations of backscatter and brightness temperatures had even lower total correlation, and thus contain more degrees of information. As for the total correlation between Tbv and TbH, the total correlation is much
lower than the Pearson correlation coefficient between o-pQ and Tbp (e.g. Piles et al.
(2015)), because it is sensitive to the entire distribution.
2.4
Applications to particular remote sensing observations
The degrees of information framework can be applied to a variety of remote sensing
observations and used to determine how many geophysical parameters can be maximally retrieved. Note that in hyperspectral imagery, determination of the number of
parameters that can be retrieved from unmixing algorithms is known as the 'intrinsic
dimensionality' problem and has been well-studied (e.g. (Hasanlou and Samadzadegan, 2012; Cawse-Nicholson et al., 2013; Heylen and Scheunders, 2013)). The high
number of dimensions in these images (generally more than 100) makes total correlation computationally expensive to calculate for such images. Instead, the primarily
application of this method is to monospectral, multispectral, and lidar data, as outlined below and shown by example in Section III.
Microwave Radiometry: Radiometric measurements are made at a certain incidence angle, frequency, and polarization. For a given incidence angle and frequency
then, DoI < 2 (Dol < 4 if the radar is fully polarimetric). Additional information
can be obtained by measuring the same pixel at multiple incidence angles. This concept is used by the soil moisture retrieval algorithm of the European Space Agency
(ESA)'s Soil Moisture Ocean Salinity (SMOS) satellite (Kerr et al., 2012), among
44
others. The degrees of information can provide a framework to calculate how many
geophysical and biophysical variables can be determined from a collection of correlated multi-angular measurements. Similar principles apply for multi-temporal retrieval algorithms, which combine measurements made at different times under the
assumptions that at least one of the retrieval parameters is constant over the time
period between the observations (as in 5) or for multi-frequency algorithms.
Radar: Whether the data is obtained using a real or synthetic aperture, the return
from radar systems can generally be described by a maximum of eight parameters - the
phase and amplitude of the backscattered waves in two possible transmit polarizations
and two possible receive polarizations. (Radar altimetry applications, which are based
on the signal return time, provide an exception.) Thus, the number of degrees of
information in a single set of measurements can be no more than eight - even though
radar scattering is sometimes expressed in a 16-element Mueller matrix.
As in passive microwave applications, polarimetric, multi-incidence angle and
multi-temporal methods (Kim et al., 2012) can be used to increase the number of
geophysical variables that can be retrieved. The DoI can be used to determine how
many polarizations, angles, or temporal samples are needed.
Lidar: The DoI framework may not be as useful for discrete pulse lidars as for
other measurement types because different returns view different parts of the canopy.
However, degrees of information can be informative when applied to waveform-recording
lidars, whether used to retrieve canopy biophysical parameters or atmospheric composition information. Unlike in radar systems, the incidence angle does not vary and
multi-incidence angles cannot be used to increase the DoI in the system. Instead,
lidar observations at multiple wavelengths and depolarizations could be used to infer
multiple properties.
2.5
Conclusion
When designing retrieval algorithms, the first choice to be made is the number of parameters to be retrieved from the measurements. The degrees of information frame45
work presented in this paper provides a method for estimating how many parameters
can maximally be retrieved depending on the amount of duplicate information present
in the joint pmf of the measurements. Use of the entire joint pmf allows accounting
for the fact that less-commonly occurring measurements add a lot of uncertainty to
the retrieval, and leads to a better estimate of the uncertainty in the data.
The degrees of information in the measurements are independent of the type of
retrieval algorithm, whether it is statistical, physical, or some combination thereof.
Once the DoI is obtained, the maximum number of independent parameters that can
be retrieved is given by the floor of the DoI. Generally, the presence of noise implies
that not all the information in the measurements can be used for parameter retrieval.
The true information content of a set of measurement is thus below the degrees of
information. Most retrieval algorithms retrieve each parameter independently (i.e.
all combinations of parameter values are possible solutions). In this case, the degrees
of freedom needed for the retrieval is exactly equal to the number of parameters to
be retrieved.
@2015 IEEE. Reprinted, with permission, from A.G. Konings, K. A. McColl, M.
Piles, and D. Entekhabi, How Many Parameters Can be Maximally Estimated From
a Set of Measurements? IEEE Geoscience and Remote Sensing Letters, May 2015.
46
VFPPWMWMWR
NRNI R 01 NO Ilop10 P1 I R'11.1
Chapter 3
The Effect of Variable Soil Moisture
Profiles on P-band Backscatter
3.1
Introduction
Soil moisture is important for climate modeling (Seneviratne et al., 2010), ecological modeling (Churkina et al., 1999), and understanding vadose zone hydrology
(Vereecken et al., 2008). It is highly variable at a multitude of scales (Famiglietti
et al., 2008). As a result, point-scale in situ soil moisture measurements are of limited use for applications spanning local to regional scales and larger. Remotely sensed
measurements naturally provide soil moisture estimates over large areas. In particular, synthetic aperture radar can make measurements synoptically at relatively high
resolution. Existing microwave measurements of soil moisture have generally been
made at L-band (e.g. the UAVSAR program (Hensley et al., 2008), the current passive L-band interferometric Soil Moisture and Ocean Salinity (SMOS) satellite mission
(Kerr et al., 2010) or the upcoming Soil Moisture Active Passive (SMAP) satellite
mission (Entekhabi et al., 2010b)) or higher frequencies (e.g. the RADARSAT satellites (van der Sanden, 2004) and ASAR (Loew et al., 2006)).
However, at these
frequencies, the signal does not penetrate deep into the soil; the penetration depth
is generally less than about 5 cm at L-band and even less at C- or X-band ( Ulaby
et al., 1986a). These instruments only measure surface soil moisture and root-zorje soil
47
moisture can only be obtained after assimilation into a hydrological model (Hoeben
and Troch, 2000; Draper et al., 2012). However, the assimilation of surface data provides limited skill when the coupling between the surface and the subsurface weakens
(Walker et al., 2002; Kumar et al., 2009), necessitating direct measurements of subsurface or root-zone soil moisture. At lower frequencies such as P-band, the radar
signal can penetrate deeper into the soil. The penetration depth varies significantly
with soil texture and moisture, but often reaches at least several tens of centimeters
even at moderately high soil moisture (Moghaddam et al., 2007).
Because the measurement depth at L- and C-bands is so small, variations in soil
moisture with depth over this range are often also relatively small. As a result, several
studies have found that the emissive (Raju et al., 1995; Escorihuela et al., 2010) and
reflective (Le Morvan et al., 2008) behavior of the soil can be described as originating
from a soil with a single, uniform soil moisture value extending over an infinite halfspace, as long as the associated averaging depth to obtain that uniform value is chosen
correctly. The error in predicted backscattering is proportional to the difference between the averaging depth and the penetration depth at these frequencies (Zribi et al.,
2014). However, over the larger depth range covered by P-band measurements, soil
moisture variation is expected to be significant. As a result, it may no longer be possible to describe the soil profile using a uniform halfspace without incurring significant
retrieval error. Furthermore, scattering due to shifts in soil moisture at depth will be
phase-shifted relative to the scattering from the land surface, complicating interpretation of the backscattering coefficient measurements (see Section 3.3). Additionally,
in cases where the surface and subsurface are decoupled - precisely those cases where
the lower-frequency measurements at P-band provide the most value - retrieving only
a single equivalent soil moisture value may make it difficult to disentangle the soil
moisture levels at larger depths.
To account for soil moisture variability with depth, multi-layer slab models can be
used. Such models approximate the variable profile as consisting of a set of layered
slabs, each with a given dielectric constant. In the limit of a sufficiently high number
of thin (with respect to wavelength) layers, the backscattering coefficient signal of
48
a multi-layer slab model is expected to be the same as that associated with the
variable profile. The multi-layer slab model can therefore be used as a forward model
(relating the measured backscattering coefficient to a soil moisture profile) in soil
moisture retrieval algorithms. Using multiple layers increases the number of unknowns
in the inversion problem and may cause it to become ill-posed. If observations at
multiple polarizations, frequencies, and/or incidence angles are available, they can
be combined to retrieve the soil moisture at different depths (and other unknown
variables) directly. If not enough observations are available, it may be possible to
use information about expected profile variation from land surface models or in situ
measurements to improve the conditioning of the retrieval problem.
For any retrieval algorithm to be successful, the accuracy of the embedded forward
model is crucial. In this paper, we study the effect of representing variable soil profiles
using a small number of discrete layers, including a single homogeneous halfspace, on
the accuracy of the simulated backscattering coefficient retrieval at P-band.
The
goal of this paper is not to build or test any specific retrieval algorithm, but rather
to examine how the sensitivity of modeled backscattering coefficient to the profile
representation can lead to design criteria for retrieval algorithms. Since testing specific
retrieval algorithms is outside the scope of this study, only the forward modeling errors
associated with different profile representations are compared.
To do so, we consider a case study of the grassland at Vaira Ranch, CA. A hydrologic model is used to determine the full profile of soil moisture at this site over a
period of ten years. These profiles are coupled to a multi-layer soil scattering model
and a vegetation scattering model to simulate the 'true' scattering behavior of the
site over the study period. The models used are described in Section 3.2. Section 3.3
illustrates several aspects of the behavior of multi-layer representations of soil moisture profiles and the pitfalls in their interpretation through both an example profile at
Vaira Ranch and idealized case studies. Placement strategies for retrieval algorithms
representing the extremes of complexity and use of prior information are described
in Section 3.4.1. Section 3.4.2 presents the forward modeling errors associated with
each of these layer placement strategies and with different numbers of layers at Vaira
49
Ranch.
3.2
3.2.1
Forward Model
Hydrologic modeling
Variations between soil moisture profiles depend on weather history, land cover and
soil texture conditions. The Vaira Ranch Ameriflux site near Ione, CA (Baldocchi
et al., 2004) is studied here as an example. This site will be imaged at P-band as
part of the NASA Airborne Microwave Observatory of Subcanopy and Subsurface
(AirMOSS) program, a polarimetric P-band airborne radar mission (Chapin et al.,
2012). The site is located near the Sierra Nevada foothills and has a Mediterranean
climate.
There is strong seasonal variability in precipitation, with a rainy season
that lasts principally from November to February. The site is covered by an annual
grassland that dies completely during the hot, dry summer.
To derive the time-evolution of the soil moisture profiles, the Simultaneous Heat
and Water Model (SHAW) is used.
SHAW simulates the physics of the coupled
movement of energy and water in the soil and the surface layer of the atmosphere, as
driven by meteorological forcings and plant parameters; the details of the model can
be found in Flerchinger et al. (Flerchinger and Pierson, 1991, 1997). Transpiration
is dependent on both the flow and uptake of water through (and by) roots and on a
detailed energy balance at the land surface. Moisture flow in the soil is governed by
Richards equation (corrected to account for water extracted by roots) and coupled to
the flow of heat in the soil.
Ten years of meteorological forcing data (precipitation, humidity, air temperature,
windspeed, and solar radiation) obtained from the Ameriflux site at Vaira Ranch
are used to drive the SHAW model. Wherever possible, site-specific above-ground
vegetation parameters, such as those describing stomatal conductance, are obtained
from the literature. The full list of parameters used is given in the Appendix.
The soil is represented using 28 layers over the top 40 cm and 9 deeper layers to
50
provide appropriate boundary conditions. The layer depths are staggered so as to be
more shallow near the surface.
The resulting modeled soil moisture is compared to measured soil moisture from
Ameriflux at two different depths in Fig. 3-1. The model correctly captures the strong
seasonal cycle of soil moisture. The average RMSE is 0.083 cm 3 /cm
3
at 5 cm and
0.062 cm 3 /cm 3 at 10 cm depth. Fig. 3-2 compares the modeled latent heat flux to
that observed by the eddy covariance tower at the site. In the wet spring, the modeled
transpiration is lower than that observed. The reduction in transpiration during the
dry summer is also slightly slower for the modeled evapo-transpiration fluxes than
for the observed ones, despite the fact that the 10 cm modeled soil moisture during
this season is drier than that observed. Parameter changes that allowed the modeled
latent heat flux to more closely match the observed led to reductions in the quality
of the soil moisture simulations (not shown) and were not adopted.
The strong seasonal cycle shown in Fig. 3-1 affects the entire soil moisture profile,
as illustrated in Fig. 3-3, which shows the average profile during each of the dry and
wet seasons, as well as the standard deviation around the mean profile. Although
the average wet season profile is relatively uniform, few instantaneous profiles show
such little variability. The sign and magnitude of the slope of the profile at different
depths depends on whether an infiltration front is moving through the soil column or
not. Over the entire wet season, profile variability averages out to be approximately
independent of depth. By contrast, because of the small number of rain events during
the dry season, soil moisture conditions almost always show a strong gradient from
the dry surface (where evaporation is highest) to the wetter subsurface, as reflected
in the average soil moisture and the lower variability during the dry season.
51
o0.
E 0.55
U 0.5
co 0.45
E 0.4
%(A
.35
E 0.3
0 0.25
o 0.2
T- 0.15
' 0.1
0.05
E
0
co
2002 2003 2004 2005 2006 2007 2008 2009 2010
Time
-Model
--- Observ.
I
'
'
c- 0.45
E 0.4.
.2L 0.35
0.3
E
b 0.25
to 0. 2
...0.15
(
0.1
E 0.05
0
U
'
e
-'
'*
2002 2003 2004 2005 2006 2007 2008 2009 2010
Time
Figure 3-1: Comparison between modeled soil moisture (black line) and Ameriflux
soil moisture observations (red dashed line) at 5 cm (top) and 10 cm (bottom) depth
over the 10 year simulation period used in this study.
140
I
I
I
I
I
tII
-Model
---Observed
120N100-
I,
I
L
I,
-
k 80
6040
20
0
w
2002
5
U
ii
2003
11
.1
ES.'
ii P~T I
BIll,
2004
2005
2006
Time
I
2007
2UU5
2009
2010
Figure 3-2: Comparison between modeled latent heat flux (black line) and Ameriflux
latent heat flux observations (red dashed line) over the 10 year simulation period used
in this study.
52
0
-0.2[
-
' -0.4
S-0.6
-0.8-
-6.1
Jun-Nov
Dec-May
0
0.2
0.1
Soil moisture
0.3
0.4
[cm 3/cm 3I
Figure 3-3: Average simulated soil moisture profile at Vaira Ranch, CA during the
local dry season (June through November, black solid line) and wet season (December
to May, red dashed line). The gray and pink shaded regions represent one standard
deviation around the mean profile during the dry and wet season, respectively
53
3.2.2
Backscattering Coefficient Model
Multi-layer soil scattering model
The majority of early soil scattering models assume that the soil moisture and other
properties are constant everywhere with depth, allowing the soil to be treated as a
homogeneous halfspace described by a single dielectric constant and a single rough
interface with air.
Fung et al.
(Fung et al., 1996), however, modified the well-
known integral equation model (IEM) and provided a closed-form solution for the
backscattering coefficient associated with a drying profile of soil moisture rather than
a constant value, where the profile gradient is controlled by a transition rate factor.
However, such -an approach assumes the soil moisture profile maintains a certain
shape, which is not always true. Alternatively, the backscattering coefficient from an
arbitrary profile may be approximated by discretizing the profile into a finite number
of homogeneous layers.
Changes or transitions in soil moisture between layers can generate scattered
waves, which combine with the waves scattered from the top of the land surface
to form the total backscattering coefficients. The relative phase (compared to that of
the surface scattering) of these waves depends on kz, where k is the depth-dependent
wavenumber inside the soil layer and z is the depth of the layer.
The phase thus
depends on both the soil moisture in the upper medium (which influences k) and
the depth at which transitions occur. For a simple two-layer system, a plot of the
total backscattering coefficient versus soil moisture in one of the layers does not grow
monotonically, but rather oscillates around the value expected for a halfspace with
the top-layer soil moisture (Boisvert et al., 1997; Ulaby et al., 1986a), because the
phase is a periodic function. For real profiles, continuous variations in the soil mois-
ture profile can generate a large number of reflected waves that sum with different
phases. In addition, small scale heterogeneities occur due to the presence of roots,
macropores, organic matter, rock inclusions, and heterogeneities in soil texture. These
elements contribute volume scattering.
Some efforts have been made to model the
volume scattering associated with soil heterogeneity (England, 1975; Onier et al.,
54
MIRROR I'M I 'W'' 11.
F
2011; Duan and Moghaddam, 2011). However, such an approach requires modeling
scatterers with specific dielectric constant and dimensions (or distributions thereof)
occurring in a homogeneous background medium. In this paper, the soil dielectric
profile is treated as corresponding to a soil moisture profile that consists of a number
of arbitrarily small homogeneous layers.
In the limit of an infinitely large num-
ber of infinitely small layers, a multi-layer slab model can accurately represent the
backscattering coefficient associated with a continuously varying profile. The specific
slab model used in this paper is described below.
If the interfaces between different layers are smooth, the modified Fresnel reflection coefficient at the top of a layered medium is a function of the properties of the
different layers below, e.g. (Kong, 2008). Several studies have used this Fresnel reflection coefficient in combination with the IEM to find the backscattering coefficient
from a two- or three-layer soil moisture profile (Song et al., 2010; Le Morvan et al.,
2008). Several other multi-layer models exist, including ones in which the backscattering coefficient is found from the Green's functions ( Yarovoy et al., 2000), using the
geometric optics approximation (Pinel et al., 2011), or using recursive transfer matrices and the small-perturbation model (SPM) (Imperatore et al., 2009). In this paper,
we use the soil backscattering model described by Tabatabaeenejad and Moghaddam
(Tabatabaeenejad and Moghaddam, 2006), which uses a first order SPM to describe
the scattering from the (potentially) rough interfaces between each layer. The model
calculates the effective up- and down-going waves representing the sum of the infinite reflections at each of the interfaces between layers by simultaneously solving
Maxwell's equations at each interface. Because the resulting equations are arranged
in matrix form, the model is generalizable to an arbitrary number of layers by inverting a matrix with larger dimensions. However, the computational cost grows quickly
with the number of layers. For first-order solutions of the small perturbation model,
including the one used here, depolarization for backscattering is neglected ( Ulaby
et al., 1986a; Kong, 2008). As a result, the cross-polarized backscattering coefficients
(HV and VH) are zero. Only co-polarized backscattering coefficients are considered
throughout this paper. The surface roughness planar correlation is assumed to follow
55
an exponential distribution.
Vegetation scattering model
When vegetation elements are longer than the wavelength, the phases of the different
components of the scattered wave are random and the scattering components can be
added incoherently to a good approximation (Van Zyl and Kim, 2011). At P-band,
this assumption becomes less valid for vegetated surfaces, and a model based on wave
theory is necessary to accurately describe the scattering due to the vegetation covering the land surface. The vegetation scattering model used here is the one described
in Burgin et al. (Burgin et al., 2012). The model is based on that of Durden et
al. (Durden et al., 1989), but adapted for use in multispecies environments (though
parameterized here to represent only one species, for simplicity). While it is primarily
designed for forests, it can be adapted to represent other land cover types. Vegetation
is assumed to consist of trunk-like and leaf-like structures, described as either finite
cylinders or cylinders and disks, respectively (for deciduous forests). Each vegetation component (trunks, large branches, small branches, and leaves) is governed by
parameters or distributions for their physical dimensions, orientation, and dielectric
structure. The Stokes matrix associated with each component is calculated based on
its geometric approximation as cylinders or disks with these parameters, and modified
to account for wave attenuation when passing through the other components of the
total plant structure. The Stokes matrices can then be added to provide the total
Stokes matrix representing scattering from all sources in the scene (Durden et al.,
1989). Crown components (branches and leaves) are assumed to be sources of volume scattering. Double-bounce scattering between the branches and the ground and
between the trunks and the ground is also accounted for in the forward model. The
soil scattering contribution to the double-bounce terms is represented by multiplying
the Fresnel reflection coefficient associated with the multi-layer soil moisture profile
by a factor accounting for the roughness at the top of the soil (Durden et al., 1989).
Higher order multiple scattering is assumed to contribute only a negligible amount
to the total amount of backscatter. Similarly, direct volume scattering from trunks
56
is assumed to be small. The total Stokes matrix is therefore,
Mtot = Mr + Mbg + Mtg + Mvol
(3.1)
where Mr, Mbg, Mtg, and M,01 are the Stokes matrices for ground scattering, branchground double-bounce scattering, trunk-ground double-bounce scattering, and crown
volume scattering, respectively.
The resulting model is highly sensitive to the vegetation canopy parameters, which
generally have to be approximated based on ground sampling and use of speciesspecific assumptions.
The scattering behavior and its sensitivity to soil moisture
profiles can vary widely depending on the parameters used.
3.2.3
Application of Scattering Model at Vaira Ranch
The soil moisture profiles derived from the hydrological modeling are used as inputs
for the backscattering model. To model the 'true' backscattering coefficient associated with the fully variably profile, 200 soil layers with 5 mm thickness are used,
representing the profile over the top 1 m. Ten additional layers represent variations
in soil moisture at larger depths. A constant incidence angle of 300 and measurement
frequency of 430 MHz are assumed, and the equations of Peplinski et al. (Peplinski
et al., 1995) are used to convert the soil moisture to the associated dielectric constant.
A surface roughness rms height of 2 cm is assumed, while all subsurface layers are
assumed to be smooth. The scattering effects of the grassland cover were described
using the parameters in Table 3.1. The parameters were obtained from a generic
grassland allometric relationship (Burgin, 2012), and modified slightly for physical
realism and computational simplicity. Because dead biomass has relatively little effect on the scattering, the vegetation scattering parameters are scaled according to
a repeating annual cycle that idealizes observed variations in leaf area index (LAI)
(Baldocchi et al., 2004). The vegetation dielectric constant and cylinder length increase approximately quadratically between day of year (DOY) 350 and 110 (with
a plateau between the start of the year and DOY 50) and decrease sharply to zero
57
Table 3.1: Vegetation scattering parameters used
Value
Canopy height [ml
0.30
Trunks length [cm]
5
radius [cm]
0.05
Leaves
density 1#/m 3]
15000
dielectric constant
length [cm]
avg. radius [cm]
12-j3
20
0.05
density [#/m 3]
10000
avg. orientation
dielectric constant
100
12-j3
after day 100. Thus, for most of the dry season, no live vegetation affecting the scattering is present. Because the sparse grassy vegetation primarily acts by attenuating
the signal and contributes very little double-bounce or volume scattering, the results
are not expected to be sensitive to the vegetation parameters used.
The P-band
backscattering coefficient is evaluated every six hours over the entire 10 year period,
and is shown in Fig. 3-4. For simplicity, only a single year of data is shown. Sharp
peaks correspond to rain events. As expected, the backscattering coefficient is much
lower in the dry season between June and November than in the wet season (except
for the extra scattering resulting from a single storm around DOY 175). The small
oscillations occurring during the dry season show that even with reflections adding
from 200 shallow profile layers, the backscattering coefficient is sensitive to the details of the modeled soil moisture profile. The backscattering coefficient measured at
VV-polarization (VV-pol) generally decreases faster after a rainfall event than the
backscattering coefficient at HH-polarization (HH-pol), as can be seen after the rain
storms (peaks in scatter) around DOY 70, 110, and 285. This occurs because the
HH-pol is generally more sensitive to the subsurface soil moisture, which stays wetter
longer after a rainfall event.
58
-15--
-
-20
-25
0
410
80
I
I
40
80
120
120
160
200
160
200
240
280
240
280
320
360
320
360
Day of year
-15
-20
I
I
-25
-30
-35
-40
I
Day of year
Figure 3-4: Seasonal evolution of simulated 'true' P-band backscattering coefficients
at VV- (top) and HH-polarization (bottom) over the year 2001, assuming an incidence angle of 300. The soil roughness rms height s=0.02 m at the surface, while all
subsurface layer are assumed to be smooth.
3.3
Behavior of Multi-layer Scattering
In order to better interpret the forward modeling errors of the Vaira Ranch case study
(described in Section 3.4), we first study the behavior of multi-layer scattering models.
Scattering originating from all depths contributes to the total measured backscattering coefficient. However, because soil is a lossy medium, the electromagnetic wave
attenuates with depth. In the absence of volume scattering, the power of the incident
wave P(z) attenuates as ( Ulaby et al., 1986a),
p(z) = P(z = 0)e- J 2a(z')dz'
59
(3.2)
where z increases downwards. The factor of two signifies two-way attenuation. The
attenuation coefficient a is given by,
a(z) = koIm
e(z))
,
(3.3)
where ko is the wavenumber in free space, Im denotes the imaginary component, and
E(z) is the soil dielectric constant profile. Because the wave attenuates with depth,
soil moisture at larger depths contributes less to the total backscattering coefficient
than soil moisture near the surface. Since the contributions to the total scattering
gradually decrease with depth, there is no unique way to define the sensing depth.
One common approximation is given by the penetration depth, p. It is defined as the
depth at which the signal power has been attenuated to 1/e times its original level
(Ulaby et al., 1986a). The p is therefore determined by the equation
1
j
2koIm
e(z)) dz.
(3.4)
Note that p is an imperfect measure of the depth contributing to the scattering,
because the variation of the intensity of the wave with depth is not necessarily proportional to the contribution of that depth to the total amount of scattering. Additionally, if the signal-to-noise ratio of the radar measurement is sufficiently high, even
variations in power caused by scattering at depths below the penetration depth could
be detected. Since the rate of wave attenuation depends on the soil moisture profile,
the measured depth can vary depending on conditions. This is shown in Figure 3-5,
which shows the variation of the e-folding penetration depth p at Vaira Ranch over
the ten years of simulation, as well as its average annual cycle. As the soil dries out
during the dry season in the middle of the year, p increases. The annual amplitude
in the penetration depth is significant.
Since depths close to the surface contribute more to the total backscattering coefficient than larger depths, the equivalent constant soil moisture of a layer is generally
different from the average soil moisture in that layer. Therefore, approximating a
variable soil moisture profile using a multi-layer model introduces errors. Such errors
60
I
I " 1
1,
1,
WOR IFFINIMMIMM Imp mpg
40
35,_,"
E
; 25
-0
c 20
0
4.
~15
a)
CL
30
20
1 Or
10
5F
0
0
100
200
DOY
300
'
'
I
I
I
I
I
I
2002 2003 2004 2005 2006 2007 2008 2009 2010
Time
Figure 3-5: Evolution of the penetration depth (in cm) over the ten years of simulation. Tick marks labeled with each year correspond to the first day of that year. The
inset shows the annual average cycle of the penetration depth
61
are essentially unavoidable in practical soil moisture retrieval settings. This occurs
because determining the exact contributions of soil moisture at different depths for
an arbitrarily varying profile is mathematically challenging; by definition, the vertical variation of soil moisture is not known at a higher resolution than that of the
backscattering model used in the retrieval process. Perhaps more significantly, a retrieved soil moisture that cannot be interpreted as representing an average value over
some layer would be of little use to the community. Land surface models themselves
typically represent soil moisture profiles through several layers with an associated
average moisture value. While treating retrieved soil moisture as representing the
average wetness over a certain depth is technically inaccurate, it is by far the most
practical interpretation.
When the soil moisture profile is represented using only a single layer model, the
forward modeling error can be quite large. This is reflected in the difference between
the average soil moisture over the penetration depth (or any other estimate of the
sensed depth) and the equivalent soil moisture for which a homogeneous halfspace
with that moisture value leads to the same backscattering coefficient. Indeed, the
equivalent soil moisture may be outside of the range of the profile all together. Fig.
3-6 shows an example of such a scenario for an instantaneous profile in January 2001
at Vaira Ranch. For both polarizations, the equivalent homogeneous soil moisture
is much higher than the soil moisture at any point in the profile. The equivalent
homogeneous soil moisture is the uniform profile value (constant with depth) that in
a halfspace forward backscattering model has the same UHH and xvv as the variable
soil moisture profile used in a many-layer 'true' backscattering model. If a retrieval
algorithm only estimates a single value of soil moisture, the estimated value in this
case will be at least 0.10 cm 3 /cm 3 higher than the maximum soil moisture in the
profile, let alone the average value. The reflections from deeper layers, which are
phase-shifted relative to those at the surface, increase the total amount of backscattering, causing the equivalent soil moisture to be greater than the maximum value.
Although the phase shift over each shallow layer is relatively small, the total phase
shift over the measured depth significantly increases the associated backscattering,
62
''I
pi, In -1
causing the surprising result shown in Fig. 3-6. Section 3.4.2 studies the backscattering coefficient's behavior for the entire 10-year simulation period at Vaira Ranch
to understand how commonly severe errors such as those shown here occur among
likely observations. In more than 25% of cases studied, the equivalent homogeneous
soil moisture value is outside the range of the actual profile. Similar behavior has
also been observed for L-band backscattering coefficients from less-realistic linearly
varying soil moisture profiles simulated using a finite element method (Khankhoje
et al., 2013).
V
0
= -12.5 dB, c
= -15.3 dB
-0.2-
S-0.3
-0.4
-0.5
-Full
profile
--- Eqvlnt, W-pol
-- Eqvlnt, HH-pol
0
0.1
0.3
0.2
0 [cm3/cm 3]
0.4
0.5
Figure 3-6: Example soil moisture profile simulated by the SHAW model (see Section
3.2.1), which has cHH = -24.9 dB and -vv = -16.9 dB when a 210-layer approximation to the full soil moisture profile is used in the P-band backscattering model (at
a 300 incidene angle and frequency of 430 MHz). The vertical lines are the equivalent
halfspace moistures that show the same HH-polarized backscattering coefficient (red,
dashed line) and the same VV-polarized backscattering coefficient (blue, dash-dotted
line) under the same texture, roughness, and sensing conditions. The roughness and
sensing parameters used are identical to those in Section 3.2.3.
For models with a finite number (e.g. two or three) of layers, the soil moisture
profile is approximated more closely and profile representation errors are expected
to be smaller than in the halfspace case.
However, multi-layer models introduce
an additional source of error: the large reflections occurring at the layer interfaces.
63
Unless there is a shift in soil texture, these may be unrealistically large. The behavior
of errors for multi-layer scattering models can be best illustrated using the simplest
possible profile, a linear one. Linear variations of soil moisture are generally unrealistic
because the flow behavior that determines the profile at any given time is controlled
by matric pressure, which is non-linearly related to soil moisture. Nevertheless, linear
profiles are used here for illustrative purposes. Soil moisture is fixed at 0.40 cm 3 /cm 3
at 30 cm depth (near saturation). The slope of the linear profile in the top 30 cm,
and thus the associated surface (z=0) soil moisture, is then varied across the dynamic
range. The soil profile is modeled as extending infinitely at a value of 0.40 cm 3 /cm 3
below 30 cm. A silty loam soil is assumed, for which the signal penetration depth
p is roughly 30 cm. Contributions to the total backscattering coefficient from below
this depth are expected to be small. The illustrative true profile is approximated
using 100 layers of 3 mm depth each. The resulting true backscattering coefficient is
shown in Fig. 3-7 for both VV- and HH-polarization. An incidence angle of 300 and
measurement frequency of 430 MHz are assumed.
Fig. 3-7 also shows the backscattering coefficient associated with several smalllayer-number approximations of the full linear profile. In the one-layer case, the soil
is assumed to consist of a uniform infinite halfspace with a moisture equal to the
average soil moisture over the top 30 cm. In the two- and three-layer cases, the
variable profile over the top 30 cm is approximated using two or three layers of equal
size. Thus, in the two-layer case, the soil consists of a layer spanning from the surface
to 15 cm with a moisture content equal to the average soil moisture over the top 15
cm, and a semi-infinite layer below it with a moisture content equal to the average soil
moisture between 15 and 30 cm. Similarly, the three layer case has layers between 0
and 10 cm and 10 and 20 cm with the average moisture content across those depths,
and a semi-infinite third layer below 20 cm with a soil moisture equal to the average
moisture between 20 and 30 cm. Using a small number of layers creates errors of
several dB in magnitude.
The two-layer approximation shown in Fig. 3-7 illustrates the oscillations caused
by phase-shifted reflections occurring at the subsurface layer interface. In the presence
64
Mean soil moisture [cm 3/cm3]
0.36
0.24 0.28 0.32
3
3
Mean soil moisture [cm /cm
0.24 0.28 0.32
0.36
0.4
-12
-12
-14-
-14
-16-
-16
0.4
V~
-18
-18
/I
-20
-22
-1-layer
--- 2-layer
'''3-layer
--- True
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Soil moisture at z=0 [cm 3/cm 3]
-20
-22
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Soil moisture at z=0 [cm 3/cm 3]
Figure 3-7: Backscattering coefficients associated with a linear soil moisture profile
between various soil moisture values at the surface (z=0) and a value of 0.40 at 30 cm
depth (pink dash-dotted line). The bottom x-axis indicates the value of soil moisture
at the surface, while the top x-axis labels indicate the average soil moisture over the
top 30 cm associated with each linearly varying profile. The black, red dashed, and
blue dotted lines represent backscattering coefficients associated with uniform, twolayer, and three-layer approximations to the linear profile, respectively. The left plot
shows the backscattering coefficients in the VV-polarization, while the right shows
the HH-polarization. Roughness and measurement parameters were the same as in
Fig. 3-6.
of these oscillations, particular backscattering coefficient values no longer correspond
to a unique moisture value, complicating retrieval efforts. For the 'true' profile, the
combination of the many constructive and destructive phase interferences between
waves scattered* from different depths results in smoothing out the oscillations. In
some cases, the discrete phase shifts can counteract the gains from representing a
profile more closely. For example, for surface soil moisture less than 0.06 or more
than 0.26 cm 3 /cm 3 , a three-layer representation of the linear profile is actually further
from the true backscattering coefficient than a two-layer representation and will lead
65
to a larger retrieval error. Although the VV-pol is more sensitive to soil moisture
than the HH-pol (it has a larger range), HH-polarized reflections are more sensitive
to variations in soil moisture below the surface.
3.4
Forward Modeling Error at Vaira Ranch
In this section, the cumulative effect of the forward modeling errors are studied for the
Vaira Ranch case study using models with different numbers of layers and different
placement strategies for the layer interfaces. Throughout, the same incidence angle
(300) and measurement frequency (430 MHz) are used as for the simulated 'trueAA2
backscattering coefficients.
3.4.1
Layering Approaches
The error associated with discrete multi-layer representations of a continuous profile
depends at least in part on where the layers are placed. The layer placement that
minimizes the forward modeling error in turn varies depending on the soil moisture
profile. As a result, the optimal layer placement is very difficult to predict without
a priori knowledge of the shape. By combining retrieval algorithms with hydrologic
modeling, data assimilation or other approaches, it may be possible to obtain an
estimate of the the shape or regime of the soil moisture profile. To determine whether
such an approach could benefit from improved layer placement, this paper compares
the errors associated with multi-layer models based on two extreme strategies:
Equal-layer approach
In the absence of any prior information on soil moisture and soil texture profiles,
the simplest multi-layer representation is one in which layers consist of equal depths.
Although the bottom layer of a multi-layer model is assumed to extend to infinity
(as with an infinite halfspace for a single-layer model), its average soil moisture still
represents the average soil moisture over a finite depth. To determine that depth for
the lowest layer, the total depth contributing to the backscattering coefficient must
66
be known. Here, we assume this depth is equal to the penetration depth p described
in Section 3.3.
Moisture-dependent approach
Since multi-layer slab models assume a constant dielectric constant in each layer,
layer interfaces should ideally be placed in such a way that the soil moisture profile
is as uniform as possible over each layer. This can be approximated by placing layer
interfaces at the depths where soil moisture is changing the most rapidly. Thus, the
moisture-dependent approach tested here places layer interfaces at the depths where
the modulus of the gradient of the soil moisture profile is highest. As before, the
bottom layer extends from the penetration depth to infinity in the electromagnetic
model; its soil moisture is equal to that of the layer above it. The layer placement
scheme is illustrated for a sample profile in the right panel of Fig. 3-8, which shows
the interface locations for a 4-layer model for an example profile. For contrast, the
interface locations used for the equal-layer approach are shown in the left panel. In
general, the layer interfaces calculated using this method tend to fall closer to the top
of the profile than to the bottom, as variations in soil moisture are more pronounced
near the surface. Since shallower depths contribute more to the total backscattering
coefficient, this is a useful attribute. This approach can only be used where prior
information on the profile shape is available, but represents a limiting scenario.
3.4.2
Results
The evolution of the simulated backscattering coefficient for different layer strategies
and numbers of layers is shown in Fig. 3-9 for the first year of simulation.
Not
surprisingly, the error generally decreases with the number of layers, although some
exceptions occur. The average profile representation error is higher in the dry season than in the wet season. This occurs primarily because the sensitivity of radar
backscatter to soil moisture is higher for drier soils, so that a given error in the soil
moisture representation corresponds to a higher error in backscattering coefficients.
67
i
0
Moisture profile-dependent layers
Equal, constant layers
0
-0.05
-0.05
-0.1
-0.1
-0.15
-0.15
01
-0---------- ----------------
-0.2-
-0.2-
0.1
0.2
0.3
0.4
Soil moisture [cm 3/cm 3l
0.1
0.2
0.3
0.4
Soil moisture [cm 3/cm 3I
Figure 3-8: Soil moisture variation with depth for an example profile. The dashed horizontal lines represent the layer interfaces used in the equal layer (left) and moisturedependent (right) approaches. The solid horizontal lines show the bottom of the depth
the lowest layer is assumed to represent. For the equal-layer approach (left) this is the
time-averaged penetration depth, while for the moisture-dependent approach (right)
it is the penetration depth associated with the specific profile.
Since the measured depth is higher in the dry season, the total unaccounted profile
variability is also generally greater during the dry season than during interstorm periods in the wet season. The dry season error dramatically decreases when the number
of layers is increased beyond one, especially at VV-polarization. Increasing the number of layers allows the model to better capture the strong gradient from the dry
surface to the (somewhat) wetter subsurface, improving the accuracy of the equivalent soil moisture representation near the surface. Since the VV-pol is less sensitive to
the subsurface than the HH-pol, and thus more sensitive to the soil moisture near the
surface, improving the near-surface soil moisture accuracy is particularly beneficial
to the VV-pol backscattering coefficient simulation accuracy. Fig. 3-9 also illustrates
that using a moisture-dependent layering approach most dramatically improves the
backscattering representation shortly after a rainfall event (e.g., during and right
after one of the sharp peaks in the evolution of the backscattering coefficient). At
such times, the rainfall infiltration fronts cause strong variations in soil moisture, the
depth of which evolves quickly in time. Varying the layer depths in time allows the
68
soil moisture variability associated with the rainfall infiltration to be at least partially
captured.
Moisture-Dependent Approach
Equal-Layer Approach
. 10
0-1C
0
0
CO
gr -15
0
0
100
200
Day of year
300
I
300
5
0
V-1"
0
-1u
-0
--
-5
-5.
100
200
300
0
Day of year
0
100
200
Day of year
300
10
1C
5- LO
0
-5
-10-15
C
0
5
0
-5
100
200
Day of year
-10
300
(
CO
200
10
5-
0
.
Day of year
10
CV
--
-2
2-2 5 -W-Pol
---HH-Pol
S-2C
-2 -25
-1
-I
D
o
-1 -layer
---3-layer
200
--5-ayerDay of year
30
Figure 3-9: Seasonal evolution of backscattering coefficients for different multi-layer
representations of the soil moisture profile. The top row shows the backscatter at
VV-(black line) and HH-polarization (red line) for a 210-layer representation of the
soil moisture profile and is taken to represent the true backscatter. The bottom two
rows show the difference between the backscattering coefficients for different multilayer representations and the true backscattering coefficients at VV-pol (middle row)
and HH-pol (bottom row). The black, red, and blue lines represent the differences for
one-, three-, and five-layer representations, respectively. For each panel, the interfaces
between homogeneous layers are spaced at equal intervals in the left column, and are
spaced depending on the locations of maximum soil moisture gradients in the right
column. A measurement frequency of 430 MHz, incidence angle of 300, and roughness
rms-height of 2 cm are assumed.
Fig. 3-10 summarizes the profile representation error statistics for different numbers of layers and for both layering strategies over the ten simulation years. The
bias and root-mean-square-error (RMSE) of the backscattering coefficient (in dB)
69
2.5
1
2
0.8
1.5-
ff 0. 6
0.5
0.2
4
3
2
Number of layers
%11
5
-Equal
Layers, VV
--- Equal Layers, HH
VV
-Moisture-dependent,
--- Moisture-dependent, HH
4
3
2
Number of Layers
5
Figure 3-10: RMSE (left) and bias (right) for soil moisture profile representations with
different numbers of layers. Solid lines represent the error at VV-polarization, while
dashed lines represent the error at HH-polarization. Black lines refer to the error when
layers are distributed so as to have equal thickness, while red lines are for simulations
in which the layer thicknesses depend on the soil moisture profile. Throughout, a
measurement frequency of 430 MHz, incidence angle of 300, and roughness rms-height
of 2 cm are assumed.
are shown.
The RMSE is higher at HH-pol than at VV-pol.
A systematic bias b
contributes to the RMSE for all numbers of layers and strategies. The bias is small
when averaged over multiple seasons with different soil moisture profiles. As a result,
2
the bias-removed (random error) RMSE, calculated as uRMSE =
RMSE 2 + b2
(Entekhabi et al., 2010a), rarely differs from the biased RMSE by more than 10%.
As expected, using a more sophisticated moisture-dependent layering approach
improves the RMSE relative to using constant, equally-sized layers. The decrease is
most consistent at VV-pol.
the number of layers.
Both the bias and the RMSE generally decrease with
Still, the HH-pol error increases, if only slightly, when the
number of layers is increased from 3 to 4.
70
As was discussed in Section 3.3, this
increase occurs because of the introduction of unrealistically large reflections at the
layer interfaces. Because the HH-polarization is more sensitive to the subsurface than
the VV-polarization, the errors from the unrealistically large reflection are larger at
HH-pol, relative to the errors due to misrepresenting the profile. As a result, it is
more common for HH-pol backscattering coefficient simulation to perform worse after
additional layers are added, as reflected in the RMSEs shown in Fig. 3-10.
In the one-layer case, the only difference between the two layering strategies is the
bottom depth over which the soil moisture is averaged. For the equal-layer approach,
this depth is 24 cm, while for the moisture-dependent approach, it is the penetration
depth at that particular time. Given the large variability in the penetration depth
with time (shown in Fig. 3-5), one would expect that the moisture-dependent approach has a much lower error than the equal-layer approach for single-layer models.
Instead, Fig. 3-10 shows it is marginally higher, reinforcing the fact that the penetration depth does not actually represent the depth that contributes to the signal, even
though it is often used to represent this depth in the literature.
3.5
Discussion and Conclusions
The relationship between the soil moisture profile and the observed backscattering
coefficient is highly complex. The sensitivity to soil moisture decreases with depth
at a rate that depends on the intervening soil moisture profile. Profile variability
also causes volume scattering, here interpreted as the superposition of waves multiply
scattered from layer interfaces. Depending on their phase, these reflected waves may
not add monotonically. Because of these and other factors, multiple soil moisture
profiles can lead to very similar or identical backscatters values. As a result, there
is no stable one-to-one relationship between backscattering coefficient and average
profile soil moisture over a certain depth; the relationship depends on how the soil
moisture varies. This is potentially problematic for efforts to estimate a single value of
soil moisture using radar, as the soil moisture profile is by definition not known when
it is being measured. It is therefore not the correct approach to use low-frequency
71
radar measurements to retrieve only a single value of soil moisture that represents
the average profile value over the contributing depth. Indeed, the homogeneous soil
moisture value that corresponds most closely to the backscattering coefficient from a
variable profile may well be entirely outside the range of the profile all together, as
illustrated in Fig. 3-6. For the ten years of simulated soil moisture profiles at Vaira
Ranch used as a case study in this paper, this occurred in more than 25% of profiles.
Profile variations can even lead to a backscattering coefficient that is outside the dynamic range of homogeneous halfspace soils all together (occurring in 5% of profiles).
The predicted backscattering error induced by using the average homogeneous soil
moisture was about 2 dB in a root-mean-square sense, but could be as large as 10 dB
in individual cases. Although an error of 2 dB corresponds to different soil moisture
retrieval errors depending on the soil moisture regime, it is clearly significant relative
to the dynamic range of measured backscattering coefficients, which could be 18 dB
or higher. In an operational soil moisture retrieval setting, unknown soil roughness
and/or vegetation parameters have to be retrieved at the same time as soil moisture.
In such cases, the profile error can lead to incorrect estimation of these ancillary
parameters on top of the soil moisture estimation error.
In theory, profile variability errors could be reduced by retrieving soil moisture at
multiple depths simultaneously. In most soil moisture estimation applications, when
each pixel is measured at only a single frequency or incidence angle, the number
of measurements is often small relative to the total number of unknowns, which
include not only the soil moisture at various depths but also vegetation and soil
roughness parameters. Retrieving the entire profile along with the other unknowns
based on single-frequency radar measurements only is thus impractical and indeed
often impossible. It may be possible to increase the number of profile layers resolved
by the retrieval if the measurement data are combined with a priori information
about the likely variation of the soil moisture profile from hydrologic modeling (see
.
also Chapter 4)
The forward modeling error calculated for ten years of realistic soil moisture profiles at Vaira Ranch follows similar meteorological patterns when multiple layers are
72
used as when a single halfspace is assumed. The error is highest shortly after rainfall
and during extended drydowns - those times when the soil moisture profile is most
variable. At VV-polarization, the forward error decreases as the number of layers is
increased and the variations of soil moisture with depth are represented more accurately. The VV-pol sensitivity to the subsurface is relatively lower even at P-band,
so that the reduction in error is primarily caused by the improved representation
of the average soil moisture in the top few centimeters. The error decreases most
quickly when switching from one to two layers, and more slowly for each additional
layer thereafter. However, the error does not always continuously decrease with the
number of layers. The interfaces between the additional layers produce additional
scattering that is unrealistically large, partially counteracting the gain from representing the profile more accurately. Since the HH-polarization is the most sensitive
to the reflections from the subsurface, HH-pol errors are more likely to increase with
the number of layers than VV-pol errors. This is reflected both in backscattering
models for individual profiles and in the overall error statistics for different modeling
configurations. The forward modeling errors due to profile variability largely consisted of random fluctuations rather than a systematic bias. Errors in retrieved soil
moisture originating from profile variability are thus similarly likely to consist mostly
of random fluctuations.
The forward modeling error is also influenced by the layer placement. The sensitivity to layer placement was tested by using both a naive layering scheme, the equal
layer approach, and a more complex one in which the layers were placed at different
depths depending on the profile and chosen to minimize variability across each layer
depth, the moisture-dependent approach. Doing so reduced the RMSE of the forward
error by 0.2 to 0.7 dB, depending on the polarization and the number of layers. The
moisture-dependent approach is most helpful shortly after a rainfall event, when profile variability is highest and infiltration fronts may be associated with sharp inflection
points. In reality, designing a layer strategy as detailed as the moisture-dependent
approach is impossible for retrieval. Nevertheless, depending on the details of a given
retrieval algorithm and the amount of prior information, it may be possible to devise
73
an intermediate-complexity layering strategy. The two extreme layering strategies
tested here suggest such a scheme might cause a moderate reduction in the forward
modeling error, and therefore also in the retrieval error.
Even the representation of the fully variable profile with more than 200 homogeneous layers used here does not capture the real complexity in the field.
Soil
dielectric mixing models assume a perfectly homogeneous soil texture, and neglect
heterogeneities in the form of roots, rocks, or organic material. Real profiles are unlikely to be as smooth as those simulated in this study. Furthermore, no errors other
than those arising from soil moisture profile variability were included in this study.
Radar speckle, instrument calibration errors, and errors in vegetation modeling and
parameterization may contribute as much or more to the total error as errors in subsurface treatment. Furthermore, depending on the exact vegetation and roughness
conditions of any given measurement location, the subsurface errors may be smaller
or larger. In this study, the vegetation had only a minimal effect on the scattering
(through attenuation), and thus had only a slight effect on the simulated forward
modeling errors (not shown).
The comparisons between scattering model simulations of various numbers of layers and soil moisture profile shapes performed in this study provide insights to guide
the development of retrieval algorithms. Such algorithms need to balance the accuracy of the profile representation (through the number and positions of different
layers) with the well-posedness of the inverse problem, which is constrained by the
limited number of polarimetric measurements available at any point in the field. If
the retrieval process is underdetermined, the retrieved solution will be strongly dependent on the measurement noise and other errors. Such noise can cause the global
minimum of the retrieval cost function to shift to a local minimum of the noise-free
cost function, which may be far away from the true solution. The balance between
profile accuracy and profile degrees of freedom is first studied by considering the effect
of representing the fully variable soil moisture profile as a set of discrete layers. Additionally, the impact of layer positioning is studied under limiting scenarios with and
without prior knowledge of likely soil moisture profile shapes. The insights provided
74
in this paper will be used in follow-up studies on the design and testing of specific
retrieval algorithms. At their core, robust and reliable retrieval algorithms should include a combination of inverse-problem regularization with a priori information and
an adaptive selection of discrete layering representation.
@2014 IEEE. Reprinted, with permission, from A.G. Konings, D. Entekhabi, M.
Moghaddam and S. Saatchi, The effect of variable soil moisture profiles on P-band
backscatter? IEEE Transactions on Geoscience and Remote Sensing, October 2014.
75
76
Chapter 4
The Use of Regularization for
Improving Profile Soil Moisture
Retrievals from P-Band Radar
Measurements
4.1
Introduction
Using lower microwave frequencies for remotely sensed measurements of soil moisture allows for better penetration through vegetation and into the soil ( Ulaby et al.,
1986a). The recently launched ESA Soil Moisture Ocean Salinity (SMOS) Kerr et al.
(2010) and NASA Soil Moisture Active Passive satellites (Entekhabi et al., 2010a)
both operate at L-band, for which no more than about the top 5 cm of the soil
contribute to the measurements (Entekhabi et al., 2010a; Ulaby et al., 1986a). Although the penetration depth varies with soil moisture and texture, it is much deeper
than 5 cm for P-band. P-band synthetic aperture radar (SAR) data generally sense
multiple tens of centimeters and can penetrate as deeply as 1 m (Moghaddam et al.,
2007). Deeper measurements allow sensing of soil moisture over (much of) the vegetation root zone, significantly increasing the hydrologic utility of the measured data.
77
For several years, the NASA Airborne Microwave Observatory of Subcanopy and
Subsurface (AirMOSS) campaign has been the first to collect large-scale P-band soil
moisture measurements. Observations were made several times a year over ten North
American sites representative of different biomes. The root-zone soil moisture measurements will be assimilated into ecological models to provide new estimates of North
American net ecosystem exchange (Chapin et al., 2012).
Surface soil moisture such as that measured by L-band frequencies and higher can
be estimated using a single average value as long as the averaging depth is chosen
correctly (Raju et al., 1995; Le Morvan et al., 2008). Over the range of the root-zone
(0 to ~1 m), however, soil moisture may vary strongly with depth. Ignoring the variation of soil moisture and estimating only an average value can lead to large errors
in P-band soil moisture retrieval (Tabatabaeenejad and Moghaddam, 2011; Konings
et al., 2014). Alternatively, it is possible to approximate the continuously variable soil
moisture profile as consisting of a set of homogeneous layers, each with a unique moisture content and corresponding dielectric constant. Chapter 3 studied the backscatter
modeling error (or forward error) associated with treating the profile as consisting of
different numbers of layers. As the number of layers used in the retrieval process
increases, the estimation error of the backscattering coefficient decreases. Increasing
the accuracy of the embedded forward model should improve the retrieval process.
However, as the number of layers increases, so does the number of unknowns. Furthermore, vegetation and roughness parameters must routinely be determined alongside
soil moisture during the inversion of the backscattering coefficient, further adding to
the number of unknowns. Although multiple transmit and receive polarizations can
be used to obtain additional measurements, there are only 2.5 Degrees of Information
within a typical set of AirMOSS backscattering coefficients
(uHH,
uvv, and
UHV)-
Thus, the number of unknowns can easily be greater than the available information
in P-band SAR measurements, leading the inversion problem to become ill-posed.
The soil moisture determined by this underdetermined retrieval problem may thus
be overly sensitive to measurement noise and is unlikely to reflect true conditions.
The ill-posedness of the inversion can be mitigated by using additional data, such as
78
__M
multi-frequency (e.g. Rao et al. (1993)) or multi-angular observations (e.g. Jagdhuber
et al. (2013)) to reduce the dimensionality of problem. However, such data are not
always available.
In the absence of additional data, one can use relationships between the soil moisture at different depths to reduce the effective number of degrees of freedom in the
inversion problem. However, the shape of a soil moisture profile can vary dramatically
depending on conditions. The AirMOSS algorithms assumes that soil moisture varies
quadratically with depth ( Truong-Lol et al., 2015; Tabatabaeenejadet al., 2015), based
on the observation that a quadratic polynomial can represent a variety of different
profile shapes. The three parameters of the quadratic function are then inverted based
on the data.
Truong-LoI et al. (2015) further minimize the overall variability with
depth. However, real soil moisture profiles are unlikely to follow a simple polynomial
approximation like the quadratic. Instantaneous soil moisture profiles depend on the
flow of water in the soil and the recent history of water sources and sinks (precipita-
tion, evaporation, and drainage). Soil water flow depends on the matric head in the
soil, which is a function of pressure and elevation. However, since the relationship
between matric pressure and soil moisture follow a power law, the resulting soil moisture profiles are highly non-linear and cannot always be well-captured by a quadratic
shape. Furthermore, changes in soil type with depth lead to discontinuities in the soil
moisture profile that cannot be captured with a continuous quadratic profile. Similarly, infiltration fronts after precipitation events often lead to sharp changes in soil
moisture at the front interface. Lastly, the use of a single quadratic profile to repre-
sent soil moisture throughout the profile, implies that the spatial variability of soil
moisture has a similar magnitude at different depths. By contrast, it is well known
that deeper moisture layers are significantly less spatially and temporally variable
than more shallow layers. Thus, while the assumption of a quadratic shape is more
flexible than a variety of other functional forms, it is contradictory to soil moisture
physics. Furthermore, the flexibility of the soil moisture profile comes at a relatively
high cost of retrieving three different soil moisture parameters. Since there is duplicate information between polarizations (see also Chapter 2) and the cross-polarized
79
backscattering has only low sensitivity to soil moisture, retrieving three soil moisture
unknowns (potentially on top of vegetation and roughness parameters) may lead to
unstable, noisy retrievals.
In this chapter, I propose to use an alternative method that uses Tikhonov regular-
ization (Tikhonov and Arsenin, 1977) for soil moisture retrievals from P-band radar
data. Tikhonov regularization has previously been used in other remote sensing retrievals, for example to minimize spatial gradients across single-look soil moisture
retrievals from X-band data (Kseneman and Gleich, 2013) or in spatial upscaling
and downscaling algorithms (Qin et al., 2013; Stoy and Quaife, 2015).
Akbar and
Moghaddam (2015) used regularization to combine active and passive measurements
of the same area for surface soil moisture retrieval. Here, the regularization is used
for soil moisture profile retrieval. The regularization incorporates the statistics of soil
moisture - determined a priori - to reduce the underdeterminedness of the problem.
It can result in a variety of soil moisture shapes and does not assume a single functional form. The use of soil moisture statistics as an additional source of information
allows for retrieving more independent layers from a single set of multi-polarization
observations than might be obtained with a classical retrieval approach. An example
of how regularization reduces the likelihood of retrieving unrealistic profiles is shown
in Section 4.2. Section 4.3 explains the regularization method, including the use of
an observing system simulation experiment to determine the optimal value of the
weighting parameter between the observations and the prior statistics. The method
is tested in Section 4.4 using P-band observations from AirMOSS covering the Harvard Forest in Western Massachusetts, USA. The regularized retrievals are compared
with limited in situ observations made at the time of the observations. However, since
these may not capture the true value of soil moisture across the larger AirMOSS pixels, the retrievals are also evaluated by comparing them to expected patterns based
on variations in soil type and vegetation cover.
80
4.2
4.2.1
Regularization Approach
Cost functions
The retrieval of soil moisture from backscattering coefficients is usually accomplished
by trying to find the set of conditions for which the predicted backscattering coefficient
most closely matches the observations. Mathematically, this entails finding the global
minimum of a cost or objective function J,
Ji=
z
(Upq(X)
(4.1)
q)
Upq
p~q
where the subscripts p and q denote the incident and scattering polarizations, X is
the vector of unknowns, including soil moisture at different depths and roughness
and/or vegetation parameters, Upq(X) is the predicted backscattering coefficient and
o-j"q represents the observed backscattering coefficient. Because the magnitude of
-pq
can vary significantly depending on the polarization, the cost function is often normalized by the observations. In this paper, we focus on soil moisture retrieval and assume
that the vegetation and roughness parameters are known. For relatively homogeneous
vegetation covers, this can be achieved by using data from in situ sampling. Alternatively, data from a timeseries of observations may be used to gain information from
additional observations (Truong-LoI et al., 2015). In that case, the smooth-surface
reflectivities F can be used instead of the total backscattering coefficients
Up,,
such
that the classical cost function becomes,
F
p
p,q
)
(4.2)
/
J =
Additional experiments using a backscattering coefficient-based cost functions (not
shown) have demonstrated that the performance of the regularization method is not
sensitive to the choice of observational parameters as long as the vegetation and
roughness parameters are known. While accounting for vegetation and soil roughness
effects can present its own challenges, it is outside the scope of this chapter.
81
In order to retrieve accurate soil moisture statistics, it is necessary to change
the topology of the cost function J so that its global minimum is closer to the true
solution. This can be done by adding a Tikhonov regularization term J2 that accounts
for the expected covariance between the two layers. This can be written quantitatively
as,
s2 =
(Oz
T C-j
-ZY)
(z -i)
The Oz is the long-term average value of Oz and C-
(4.3)
is the inverse of the covariance
matrix of 6. They both depend on the local climate, land cover, and soil texture.
The total cost function J is then given by
+ A (0
J = J + AJ2 =
pq
(
Z)T Cz1(0z
),
(4.4)
0p~q
where the A is a single weighting parameter that controls the relative contribution of
the measurement and regularization terms. The added regularization term penalizes
different profile deviations from the mean according to the magnitude of their expected covariance. The regularization method thus has three parameters: the mean
profile, the inverse covariance matrix of the profile, and the weighting term A. The
mean profile and inverse covariance matrix can be determined using either simulated
soil moisture data from a hydrologic model, or statistics derived from nearby in situ
measurements. Since these parameters depend on the average profile statistics, they
are not expected to vary significantly in space. The optimal value of A depends on
the variability of the soil moisture profiles and the measurement conditions and is
difficult to determine a priori. The source of data that is used to calculate the profile
statistics can also be used to generate a simulation experiment that can be used to
determine the optimal value of A, as will be further discussed in Sec. 4.3.
4.2.2
Illustrative example
In this illustrative example, the forward or 'true' soil moisture profile is close to
continuous.
It is shown in Figure 4-1. This is a sample profile based on in situ
82
measurements, which are further described in Sect 3.4.2.
The observed smooth-
surface reflectivities 1F associated with this forward profile are calculated by using
the continuous fractions solution to Maxwell's equations for a set of smooth slabs
with different dielectric constants, derived by Kong (2008).
To use this solution,
the continuous forward profile is approximated as consisting of 160 layers of 5 mm
of depth each. In doing so, the soil moisture difference between consecutive layers
becomes small, and in the limit of infinitely small layers, the resulting calculated
reflectivities will equal the reflectivities of the continuous profile.
It is of course
infeasible to retrieve all 200 layers of soil moisture independently with polarized but
single-frequency backscatter measurements. Instead, the full profile is characterized
in this example by the average soil moisture values over two layers: 0-14 cm and 1428 cm. The bottom depth of 28 cm is chosen based on the approximate penetration
depth (the e-folding depth of the wave power) for the region, as further discussed in
Sec 4.4. Figure 4-1 also shows the average soil moisture of the continuous profile in
each of the two 14 cm layers. Even if a two-layer retrieval algorithm cannot retrieve
the entire profile, it would ideally retrieve these average values. A P-band sensing
frequency of 430 MHz and incidence angle of 40' are assumed.
Figure 4-2 shows the cost function J as a function of the two unknowns X
{01, 02}
where 0, is the soil moisture in layer z. The pink square represents the average
soil moisture values associated with the profile (the ideal solution), while the white
square shows the true global minimum of J1 . The simplification of the fully variable
profile to a two-layer profile changes the topology of J such that the equivalent twolayer soil moisture in the profile is not the one that most closely matches observations.
Furthermore, the function has several local minima.
The bottom left panel of Fig. 4-2 shows the topology of J2 as a function of 0,.
Again, the pink square shows the average soil moisture values associated with the true
profile, while the white square shows the global minimum of J2 . Not surprisingly, the
global minimum J2 is equal to 0;, where J2 = 0. Because Czz is symmetric, so is
J2 . As shown in the right panel of Fig. 4-2, the combined cost function includes
contributions from both the measurements and the a priori expectations, and has a
83
0
-0.05
E
-0.1
'E-0.15
-0.2
-0.25
0
0.1
0.2
0.3
0.4
Soil moisture [cm 3/cm 3
Figure 4-1: Sample soil moisture profile derived from in situ measurements at Harvard
Forest on February 4th, 2012 used to calculate the 'true' forward backscatter of Fig.
4-2. The dashed line represents the average soil moisture over two layers of 14 cm
each; the optimal solution of a two-layer retrieval algorithm.
global minimum (white square) close to the true solution (pink square). Additionally,
the new cost function has far fewer local minima.
In this example, the many local minima in the topology of J1 originate in part
from the differences between the reflectivities of the fully variable profile and the
two-layer simplification used in the retrieval process. In general, observations will
be influenced by other sources of modeling and measurement noise that will serve to
further distort the topology of J1 , such that the global minimum is even further from
the true solution. As in the above example, an appropriately weighted regularization
term is necessary to reduce the number of incorrect minima, where the weighting is
determined by the value of A. In many data assimilation problems, the cost function
to be minimized has a similar form to Eq. (4.4), but rather than having an explicit
weighting parameter A, the relative weights of the observational and regularization
or model term are determined by the size of the covariance terms in each.
This
approach has also been used for the retrieval of atmospheric temperature and humidity
profiles from the inversion of satellite soundings (e.g. Eyre, 1989).
In such cases,
the covariance terms represent the covariances of the errors in the observation and
84
Ji
2
0.4
J +kJ2
0.0.2 2
0.5
0.1
400
0.4
15
0.3
1
J2
.
0.2 Sm
0.4
0.4
~0.2
C14
0
sm1
20.2
200
0.2 0.4
sm1
Figure 4-2: Different cost function components as a function of the top-layer and
bottom-layer soil moisture. In the top left panel, the objective function without
regularization (minimizing the squared normalized difference between measurements
and expected values) is shown, where the measurements are those expected for the
profile shown in Figure 4-1. In the bottom left panel, a pure regularization term
is shown. The right panel shows the sum of the two, with the regularization term
weighted by parameter A = 0.01. In each panel, the white square represents the global
minimum of the displayed quantity, while the pink square represents the optimal
solution for the profile used to generate the simulated measurements.
model, such that the model and observation are weighted equally if the two are
equally uncertain.
Here, to avoid a dependence on the particular assumptions of
the hydrologic model, no such assumption is made.
This also avoids the difficulty
of estimating the uncertainty associated with the observations and radiative transfer
models.
Note that even though C,
is defined based on the covariance of the soil
moisture profiles themselves, rather than of the errors associated with their estimates,
this is equivalent to calculating the error covariance term associated with a model
assuming the soil moisture profile is always equal to its climatological mean. In this
example, A = 0.01. For different values of A, J = J
+ J2 may not represent the true
solution as a minimum. For a given site, the optimal value of A must be determine
using a simulation experiment, as discussed further below.
85
4.3
Observing System Simulation Experiment at Vaira
Ranch
The core of the simulation system is comprised of a coupled hydrologic model and
electromagnetic scattering model. These are used as a forward model to simulate
a set of P-band backscatter measurements at a site in California. This part of the
simulation system is identical to that used in Chapter 3, but is also described in detail
below for completeness. The resulting simulated measurements can then be used as
inputs to a variety of potential retrieval algorithms. In turn, the output of these
retrieval algorithms can be compared to the original hydrologic simulations to study
their performance.
4.3.1
Model description
At a given location, the soil moisture profile is determined by the local history of
precipitation entering the soil on the one hand and moisture leaving the soil through
evaporation, root uptake, and diffuse recharge on the other hand. Furthermore, the
flow of moisture through the soil acts to redistribute the soil water content across
depths over time, as governed by Richards equation. Evapotranspiration fluxes at
the land surface are limited by energetic as well as water balance equations.
To
capture these effects, the one-dimensional Simultaneous Heat and Water (SHAW)
model is used. A detailed description of the model equations can be found elsewhere
in the literature (Flerchingerand Pierson, 1991, 1997). The model is parameterized
to represent the Vaira Ranch Ameriflux site near lone, CA (Baldocchi et al., 2004); the
specific parameters used are given in Appendix A. Micrometeorological parameters
measured at the site are used to drive the evolution of the model.
The site has
a strongly seasonal climate with a hot, dry summer (lasting roughly from June to
November) and a cool, wet winter (lasting roughly from December to May).
The simulated soil moisture profiles are then coupled to a multi-layer slab model
for the surface reflectivity (Kong, 2008). The soil scattering model represents the
86
soil as a set of 'slabs' of homogeneous soil moisture, such that scattering originates
from the interfaces between the layers. Here, 200 layers of 5 mm depth each are
used. The electromagnetic properties of the bottom layer, representing a depth of
around 1 m, extend to infinity.
Since 1 m is well below the average penetration
depth of 24 cm at the site, the bottom boundary condition is not expected to have an
influence on the accuracy of the simulations. We assume that the coherent sum of the
scattered waves from the layer interfaces accurately approximates the true backscatter
from a continuously varying soil moisture profile for a sufficiently high number of
sufficiently small layers. The contributions of rock inclusions, macropores, organic
matter and other sources of heterogeneity to the total volume scattering are neglected.
Using more than 200 layers does not change the simulated forward soil backscattering
coefficient. The land surface roughness is assumed to be distributed isotropically and
exponentially, with a root-mean-square height of 1.3 cm and a correlation length of
13 cm. Subsurface layers are assumed to be smooth. An incidence angle of 300 and a
measurement frequency of 430 MHz are assumed. This is the center frequency used
by the AirMOSS mission.
4.3.2
Experiments performed
The regularized retrieval algorithm minimizes the objective function J in Equation
(4.4) to retrieve an unknown soil moisture profile and unknown roughness root-meansquare height. The retrieved profile is approximated by four constant layers, each of
six cm depth, consistent with the fact that the average P-band penetration depth for
this area is about 24 cm (Chapter 3). The four layers provide a balance between a high
enough number of layers to reduce errors due to profile variability and a sufficiently
low number of degrees of freedom so that the regularized retrieval is not strongly
underdetermined. Figure 4-3 shows the evolution of the four soil moisture layers over
2001. During the dry summer, the top layers are drier than the subsurface layers
as they are more affected by evaporation. In the wet season, precipitation events
first enter the soil at the surface, so that the shallow layers are generally wetter than
deeper layers. The dynamic variability decreases with depth. The combined retrieval
87
0.4
0.350.3-
0.25-
E
E
0.2
S0.15
0.1 -0-6 cm
--- 6-12 cm
0.05 -- 12-18 cm
-18-24 cm
050
100
150
200
Day of Year
250
300
350
Figure 4-3: Timeseries of 'true' average soil moisture simulated by SHAW for each of
the four layers retrieved by the algorithms, i.e. the top six cm (black solid line), 6-12
cm (red dotted line), 12-18 cm (blue dash-dotted line), 18-24 cm (green solid line).
algorithm has somewhere between one and five (four soil moisture profile layers and
one roughness parameter) degrees of freedom.
The mean profile and inverse covariance matrix used in the regularization are determined after calculating the average soil moisture in each of the four 6-cm layers for
all profiles in the ten years of hydrologic simulation. To determine how sensitive the
inversions are to the value of the weighting parameter A, different values are tested.
The regularized retrievals are also compared to two alternative algorithms without
regularization. In one algorithm, four layers of soil moisture are retrieved without
regularizing the inversion cost function, i.e. by minimizing Eq. 4.2. Additionally,
a third algorithm is tested in which only a single average soil moisture value is retrieved for the entire profile. Each of these algorithms is tested on a full year of daily
simulated backscatter observations representing January 1st, 2001 to December 31st,
2001. For each algorithm, errors are compared by calculating the root-mean-squareerror (RMSE) between the retrieved and true average value in each of the four 6-cm
88
Table 4.1: Soil parameters for different SHAW runs
Parameter name
Units
Forward value
Campbell's pore size distribution index 2.83
Air-entry potential
cm
-42.3
Saturated hydraulic conductivity
mm/hr
8.3
3
Bulk density
cm/m
1.09
Porosity
cm 3 /cm 3 0.59
Sand %
0.30
Alternate value
5.33
-7.7
7.7
1.39
0.40
0.20
Silt %
-
0.57
0.64
Clay %
-
0.13
0.16
layers per profile. For the single-layer retrievals, each of the four layers is set equal
to the single value resulting from the inversion of the backscatter measurements. To
ensure the global minimum is found for each retrieval, the cost function minimization
is performed using a datacube approach.
The mean O; and covariance matrix C,, of the profile depend on the local climate,
land cover, and soil texture. In this study, the calculated values were obtained by
averaging all the years of daily profiles simulated by using SHAW. Operationally, the
mean value of the model results used to infer the local statistics may be imperfect.
Aside from potential errors in the model physics or parameterizations, the climatologies of modeled soil wetness produces often differ significantly from each other and
observations (Reichle et al., 2004; Koster et al., 2009). To determine the sensitivity
of the retrieval performance to the values used in regularization, values are retrieved
using statistics determined from two different runs of the SHAW model. Aside from
the run used in the forward model, a second run is used in which the soil type differs.
Table 4.1 lists the two sets of soil parameters. The resulting mean profile and inverse
covariance matrix are shown in Figure 4-4. Although the magnitude of both OZ and
Cj
differs widely between the two cases, the vertical structure is similar for both.
89
C-1
0
10000
E
5000
2
-10
E-5000
3
0
4
0-20
1
0.1 0.15 0.2
0 [cm3 /cm 33
0
2
3
4
1
0000
-10
2
5000
CL
C) -20
3
0
4
-5000
1
0.1 0.15 0.2
2
3
4
6, [cm3/cm 3]
Figure 4-4: Mean profile (left column) and inverse covariance matrix (right column)
for the forward (top row) and alternative (bottom row) hydrologic model results.
4.3.3
Results
Regularization Weight
The value of A affects whether the true profile at any given time actually minimizes J.
If A is too large, true deviations from the mean due to normal variations in weather
history will be unduly punished and the retrieved profile will always be close to the
mean. If A is too small, however, the retrieval reverts to the ill-posed, unregularized
retrieval. The optimal value of A varies widely between profiles. Depending on how
closely the profile values and layer covariance (relative to the mean profile) follow the
specified profile-average mean profile inverse covariance, the optimal value of A may be
lower or higher. Additionally, in the presence of measurement or modeling errors (such
as the error created by retrieving only four soil moisture layers), an artificially high or
low value of A may cause cancellation of errors and give the retrieval the appearance
of improvement. When averaged over multiple profiles, however, there is a globally
optimal value of A. This is shown in Fig. 4-5, which depicts the combined root-mean-
90
0.2r
E 0.15-
CD
0.1
-
E
-
0
I0.05
10
10
104
100
Figure 4-5: Root-mean-square error of one year of simulated regularized retrievals as
a function of the regularization weight A at Vaira Ranch
square error of all retrieved profiles and averaged over all depths, for different values
of A. The curve has a clear minimum around A = 10-1-3. This value is used in all
further retrievals with regularization. Furthermore, the error curve is relatively flat
near the minimum value of A. Because all simulation studies are imperfect to some
extent, the 'true' error curve may differ slightly from that shown in Fig. 4-5, and the
value of A = 10". may not be optimal when applied to a real dataset. However, the
flatness of the curve near the minimum suggests that using A = 10-1.
rather than
the true optimal value will not significantly affect the retrieval performance.
Retrieval with perfect regularization statistics
Fig.
4-6 shows the evolution of the retrieved soil moisture of the shallowest soil
layer (0-6 cm) for the three algorithms. As small changes in the fully variable soil
moisture profile and differences between measurement noise between days change the
location of the local and global minima of J1, the four-layer soil moisture retrieved
without regularization differs.
in Fig.
As a result, the associated timeseries (green line)
4-6 shows large fluctuations.
If only a single average soil moisture value
and roughness height are retrieved, the inversion is no longer underdetermined and
91
0.4
0.35
It.
0.3
E
E
0.25
It
0.2
oil
II 'I
Ig'
0.15
0.1
,111111
-True
0.05 -- Retr. w/ reg
Retr. w/out reg
0
50
?
100
150
200
Day of Year
250
300
350
Figure 4-6: Timeseries of the top-layer (0-6 cm) retrieved soil moisture using different
retrieval algorithms. The red dotted line is the retrieved value using a regularized cost
function with four layers and the value of A that corresponds to the global minimum.
The blue dash-dotted line is the top layer value for unregularized retrievals with the
same number of layers. The black line us the true average soil moisture over the top
six cm.
becomes significantly more stable. However, additional error is caused by neglecting
the variability of the soil moisture profile with depth. This leads to particularly large
errors in the one-layer retrieval at times when the soil moisture profile varies most:
after rainfall events (during peaks in the timeseries), when the surface is often much
wetter than the subsurface, and during the dry season (roughly from Julian day 120
to 250), when the surface is much drier than the subsurface. In each case, the average
retrieved soil moisture is drier (wetter) than the value in the top-most layer, so that
there is a consistent bias to the average retrieved values in each of the two periods.
By contrast, the regularized retrievals are both stable and accurate.
Figure 4-7 shows the timeseries of true soil moisture and regularized retrievals for
all four layers. The retrieval quality is similar for all layers. After rainfall events,
however, the regularization term constrains the solution too much. Shortly after a
rainfall event, an infiltration front travels through the soil. While shallower depths
are very wet, deeper layers are still dry if the infiltration front has not reached them
92
6-12 cm
0-6 cm
0.4
E0.3
E 0.3
0.2
E 0.2
.)
E
S0.
S
0.4
100
200
Day of Year
12-18 cm
0.3
100
c~-'
300
0.4 -True
--- Retrieved
0.3-
-".
100
200
Day of Year
18-24 cm
E
E.20.2a.
0
1
300
E 0.3-
01
<D"
.
-
0.4
200
Day of Year
0
300
Day of Year
3
0
Figure 4-7: Timeseries of the true (black solid line) and retrieved soil moisture (red
dashed line) using regularization in each of the four retrieval layers.
Table 4.2: Root-mean-square retrieval
Regularized Regularized
retrieval,
retrieval,
alternate
forward
covariance covariance
0.028
0.026
01 [% vol]
0.018
0.018
02 [% vol]
0.015
0.015
03 [% vol]
0.026
0.024
04 [% volj
0.023
all [% vol] 0.021
error for different algorithms
Unregularized Unregularized
retrieval, 1 retrieval, 4
layers
layer
0.036
0.019
0.050
0.017
0.064
0.029
0.026
0.070
0.070
0.064
yet. The regularized retrievals at these times are too wet at depth, leading to large
errors there, as can be seen during the rain event near Julian day 180 or, for the
deepest layer, during the wetting and drying phases near day 300.
The root-mean-square errors for all layers are shown in Table 4.2. For all layers,
the regularized retrievals have the smallest root-mean-square errors. No matter the
retrieval algorithm, the error increases with depth due to the reduced sensitivity of the
observations to soil moisture at depth. Four-layer retrievals without regularization
are unstable, leading to high retrieval errors more than three times as high as those
of the regularized retrieval.
93
Sensitivity to regularization statistics
Table 4.2 also shows the error statistics for soil moisture retrieved using a regularization term with the alternate profile statistics. Both sets of simulated retrievals have
the same optimal value of A. Not surprisingly, the performance of the regularized
retrievals degrades when the regularization statistics are imperfect. However, despite
the widely different magnitudes of both 0, and C- 1 , the algorithm still performs well
and significantly better than alternative retrieval algorithms.
4.4
Application to AirMOSS observations at Harvard Forest
Vaira Ranch (and the Tonzi Ranch nearby) is covered by one of the AirMOSS sites.
However, fewer AirMOSS observations exists over Vaira Ranch than over most other
AirMOSS sites due to the Ranch's location close to the Beale Air Force Radar, which
often limits the ability to operate a P-band radar such as that of AirMOSS. Over much
of the AirMOSS domain, the landscape is covered by a mixture of shrubs and oak trees
that is highly heterogeneous and for which it is difficult to determine optimal scattering parameters describing the vegetation. Instead, the regulariation method is applied
to AirMOSS data flown over the Harvard Forest region in Western Massachusetts,
USA. An alternative procedure for accounting for vegetation and roughness has been
applied (Truong-LoI et al., 2015), which is briefly summarized here for completeness.
The method uses data from the Forest Inventory Analysis (FIA) as input structural
data for a canopy backscattering model representing the various components of the
vegetation (Saatchi and McDonald, 1997), which is then in turn used to derive sitespecific vegetation parameters that allow the effect of vegetation to be described as
94
a function of biomass,
o-pQ =ApQW
PQ cos 6 (1
-
e-BPQWOPQlcosO)
3
+ CPQFPQ(E, )W PQ sin 0e-BQW PQ/cos0
+ SHH (E,
0) eBWP/cosO.
(4.5).
where W is the above-ground biomass, 0 is the local incidence angle, 6 and SPQ are
an effective dielectric constant and its associated bare-soil reflectivity, respectively,
and ApQ, BpQ, CPQ, ozpQ,
!3pQ,
and ypQ are site- and polarization-specific parameters
determined from the full canopy backscattering model. The biomass and soil roughness values are then assumed constant over the multiple (usually three) flights in a
campaign. The values that minimize the mismatch between the observed backscatter
and the predicted backscatter from Eq. (4.5) are used. In this first minimization,
a placeholder optimal effective dielectric constant is retrieved. The optimal biomass
and roughness values are then used to invert the backscattering coefficients for the
surface reflectivities.
The Harvard Forest is owned by Harvard University and consists primarily of red
oak and red maple trees. The vegetation is 50-70 years old (Goulden et al., 1996).
It has been used for experimental studies since 1907 and has been making eddy
covariance measurements of carbon fluxes in the region since the late 1980's ( Wofsy
et al., 1993). These measurements will be used to validate the AirMOSS L4 modeled
carbon fluxes derived from AirMOSS root-zone soil moisture measurements. The site
contains only moderate topography and has well-drained, loamy soils.
Data from a three-day AirMOSS campaign in October 2012 are used; data are
available on October 15, 2012, October 18, 2012, and October 21st, 2012. The observed backscattering coefficients are further averaged over a 3 by 3 block to reduce
speckle. A set of three in situ soil moisture profiles is available spanning two of the
AirMOSS pixels. These will be used to determine the regularization statistics and
to run an observing system simulation experiment in Section 4.4.1. A much large
range of in situ surface soil moisture measurements spanning many pixels were taken
95
at the time of overpass on October 15th and October 18th. These will be used to
validate regularized AirMOSS retrievals in Section 4.4.2. Because the in situ measurements have some representativeness error relative to the AirMOSS pixels and are
only available for the top 5 cm, the spatial patterns of the regularized retrievals are
also examined for physical consistency as an additional check in Section 4.4.3.
4.4.1
Derivation of regularization parameters using an OSSE
As in Section 4.3, an observing system simulation experiment (OSSE) is used to
determine the regularization statistics.
In Section 4.3, the forward soil moisture
profiles were derived from a hydrologic simulation of the unsaturated zone. In situ
measurements are used here to show that these can also be used to determine the
regularization statistics. In situ soil moisture profiles are available at 2, 5, 10, 20,
40, 60, and 80 cm depth (Cuenca and Hagimoto, 2012). The measurements were
averaged across the three profiles. The soil moisture values were converted to matric
head using the Van Genuchten equations (van Genuchten, 1980) and interpolated
linearly in pressure units. Soil texture is determined from the Soil Survey Geographic
Database (SSURGO) (Soil Survey Staff, Natural Resources Conservation Service).
This matric interpolation was sampled daily at 6:00 AM to generate a record of daily
soil moisture profiles. The record is used to calculate the mean soil moisture and
covariance matrix across four layers of 7-cm each. The evolution of the four 7-cm
layers is shown in Figure 4-10a.
They are remarkably constant over time, likely
due to the lack of strong rainfall seasonality and well-drained soils at the site. The
four 7-cm layers add up to a total measurement depth of 28 cm, this is the average
penetration depth (the e-folding depth of the wave power ( Ulaby et al., 1986a)) at
the AirMOSS center frequency. the dielectric model of Mironov et al. (2004) is used
throughout. The resulting mean profile and inverse covariance matrix are shown in
Figure 4-8. Note that the inverse covariance matrix has a similar spatial structure
to that of Vaira Ranch (Figure 4-4) but has values that are an order of magnitude
higher. This reflects the fact that the soil moisture at the Harvard Forest is less
temporally variable than at Vaira Ranch.
96
10 4
0
10
-5
~-15
3
0
-20
4
-25
-5
0
0.1
0.2
3
j [cm 3/cm I
0.3
1
2
3
4
Figure 4-8: Mean profile (left column) and inverse covariance matrix (right column)
used in the regularization for Harvard Forest
Daily soil moisture profiles based on in situ measurements are used to simulate
observed reflectivities, to which the regularized retrieval method is applied. Figure
4-9 shows the resulting RMSE between forward and retrieved profiles as a function
of the regularization weight A in black. As in figure 4-4, an intermediate value of
A, A =
10-2.1
provides the optimal value of the weighting parameter (the lowest
simulated retrieval error).
Note that this value is almost an order of magnitude
less than the optimal value found in the analogous OSSE for Vaira Ranch. This is
consistent with the higher magnitude of the inverse covariance matrix at Harvard
Forest. If this value of A is used, the regularized soil moisture across the four 7-cm
layers compares well with the average values across the interpolated layers used in
the forward part of the OSSE, as shown in Figure 4-10.
4.4.2
Comparison to in situ data
Over a small subset of the AirMOSS flight lines, in situ measurements of soil moisture
were made during two of the campaigns. Measurements were made using a Stevens
POGO portable soil sensor representing a depth of 5.8 cm. Because the support scale
(a few cm) of a single in situ measurement is many orders of magnitude smaller than
that of the AirMOSS measurements (Bl6schl and Sivapalan, 1995) and soil moisture
97
0.1
0.09
0.08
0.07
e;-0.06
E
0.05
-
0.04
0.030.02-
-
0.01
10
Figure 4-9: Root-mean-square error of one year of simulated regularized retrievals as
a function of the regularization weight A at Harvard Forest
"Retrieved" soil moisture
"True" soil moisture
0.4
0.4
,-0.35-
g-0.35
E
C 0.3
E
(00.3
0.25
0-0.25
S0.2
0.2
E 0.15
E 0.15
0.1 -
00.0
0.10.05-
0.05-
0
-0-7 cm
--- 7-14 cm
-- 14-21 cm
-21-28 cm
100
200
100
360
DOY
200
300
DOY
Figure 4-10: Average 7-cm soil moisture values across interpolated soil moisture profiles (left) used as ideal retrievals for the OSSE at Harvard Forest and (right) values
retrieved by the regularization algorithm with A 10-".
98
has significant spatial variability, many measurements are needed to determine representative soil moisture across a remote sensing pixel (Famiglietti et al., 2008). It
is not practical to determine the soil moisture profile across the penetration depth
for many points in a single day, so only surface soil moisture measurements are made
here. Three measurements were made every 50 m across a transect of 15 plots. On
October 18th, an entire quadrant of such transects were measured. Because the flight
paths and transects are not aligned, the number of in situ measurements per AirMOSS pixels varies between 9 and 21 on October 15th, and between 3 and 6 on
October 18th. Figure 4-11 shows the range of in situ soil moisture measurement for
each AirMOSS pixel, along with the soil moisture retrieved value. Because of the low
number of measurements, the full range is shown instead of the more common standard deviation. Despite the high spatial variability within each pixel, the retrieved
value is within or close to the range of observations in most cases. With the exception
of pixel 1 on October 18th, the spatial trend along the transect is also similar between
the retrievals and the observations. The remaining errors are likely a combination of
errors in the regularization retrieval method, errors in the assumed vegetation and
roughness parameters, noise in the observations, and representativeness error between
the in situ measurements and the AirMOSS observations. Overall, there is a small
positive bias in the retrievals. Since many soils increase in wetness with depth, a
portion of this bias might be due to the differences between the 7 cm depth represented by the retrievals and the 5 cm depth over which the measurements were taken.
However, this effect is probably minor relative to other sources of bias.
4.4.3
Comparison with landscape characteristics
To (further) evaluate the profile retrievals, their spatial patterns are compared to
the spatial patterns of landscape characteristics. Landscape characteristics such as
vegetation, soil type, and elevation influence the fluxes of water in, through, and out of
the soil, and thus the expected trends of the soil moisture fields. To be able to visually
identify patterns in the retrievals, three 5 x 5 km focus regions are first selected for
closer inspection. These regions are determined prior to performing the retrievals and
99
October 15th, 2012
October 18t, 2012
0-6
*POGO
0A
A
E
A
1
203
retrieval w/
reg, 0-7 cm
05-
1
0.4
0.3
E
-
I
05
SGPOGOmeas, 0-5.8 cm
- retrieval w/ rea, 0-7 cm
neas,0-5.8cm
E
02
0-1
01-
1
2
3
4
5
Unique pixel #
6
7
8
-0
0.5
1
165
2
Unique pxel
2-5
3
3,5
4
#
-0
-
902
Figure 4-11: Top-layer (0-7 cm) regularized retrievals (red triangles) compared to
the range of in situ measurements (0-5 cm) across each AirMOSS pixel with in situ
observations. The black dot is the average of the in situ measurements. Data from
the October 15th, 2012 flight are shown on the left, while the right figure shows data
from October 18th, 2012.
selected such that their landscape characteristics are similar to those of the entire
flight area. As shown in Figure 4-12, the cumulative distribution of soil type (sand
fraction and clay fraction), topography (elevation and topographic moisture index
TMI, also known as the topopgraphic moisture index (Beven and Kirkby, 1979)),
and vegetation (IGBP land cover type from the National Land Cover Database and
aboveground biomass derived from AirMOSS timeseries according to Truong-Lol et al.
(2015) ) are comparable. Note that the clay fraction and retrieved biomass have a
direct influence on the soil moisture retrievals by affecting the dielectric mixing model
and reflectivity retrieval approaches ( Truong-LoI et al., 2015), respectively. Thus, it
can be difficult to disentangle whether a spatial pattern of soil moisture that coincides
with patterns in these ancillary variables is occurring because of natural co-variability
or because of direct compensation in the retrievals. This is not a concern for the other
landscape characteristics.
Figure 4-13 shows the landscape characteristics and soil moisture retrievals for the
first focus region on October 18th, 2012. No single landscape characteristic dominates
100
Clay Fraction
- -----
Sand Fraction
1
1
0.5
0.5
0
50
10 0
10
5
Elevation [m]
110
TMI
1
1
0.5
0.5
0
10
20
Retrieved biomass
0
30
0
Figure 4-12:
100
200
200 400 600 800 1000
Land cover type
0.5
00
15
1wI
-
-
0
DF EF MF SL GL PS CR
300
Cumulative distribution of sand fraction, clay fraction, topographic
moisture index, elevation, and retrieved biomass for the entire Harvard Forest flight
right
path (black line) and the 3 focus regions (red line), respectively. The bottom
shows the distribution of land cover type between the flight path and the focus regions
deciduous forest, EF = evergreen forest, MF = mixed forest, SL = shrubland,
(DF
grassland, PS = pasture, and CR = cropland).
GL
101
the pattern of the soil moisture in the retrievals, but their influence on overall soil
moisture spatial variation can still be seen.
The diagonal 'line' of pixels with a
high sand fraction corresponds to significantly lower soil moisture. This is consistent
with physical expectations. Relatively sandy soils generally have a higher hydraulic
conductivity and lower porosity than more clay-like soils, and thus drain faster. For
relatively wet conditions such as those shown in the retrievals, we expect this effect
to be especially significant near the wetter surface compared to deeper layers, as is
observed in Figure 4-15. In addition, the lower right corner of the domain, where
biomass is generally lower than in the rest of the domain, corresponds to slightly
wetter retrievals. The lower biomass is likely to have lower transpiration and root
water uptake rates.
Figure 4-14 shows the second focus area on the same day. Soil moisture is generally drier in the regions with deciduous forests than in regions with evergreen forests,
perhaps reflecting higher transpiration rates in deciduous forests.
No clear corre-
spondence between soil moisture patterns and landscape characteristics is observed
in focus region 3 (Figure 4-15). Multiple landscape characteristics with different spatial patterns affect soil moisture, and the ancillary data may itself have errors. It
is not clear if the lack of systematic patterns in Figure 4-15 is due to the quality
of the retrievals or the limited predictive power of the comparison with landscape
characteristics.
To better disentangle the multiple effects that might be influencing the soil moisture retrievals, Figure 4-16 shows a boxplot of the retrieved top-layer soil moisture as
a function of the soil sand fraction (note that this is not used directly in the Mironov
dielectric mixing model for the retrievals, unlike the clay fraction).
As expected,
sandier soils generally have drier soil moisture. Similarly, as shown in Figure 4-17
soil moisture is driest in locations with the lowest topographic moisture index, reflecting expected patterns in subsurface lateral flow. The topographic moisture index
(TMI = log
AD
(Beven and Kirkby, 1979), where A, is the cumulative drainage
area and 0 is the local topographic slope) captures the effect of drainage on subsurface
wetness and is expected to scale with soil moisture.
102
I
EWAbanlml
5.0
Clay Ffacetan
Sand FRacoan
Land coWr Type
Moad
Forgat
Evd
Forat
Topo MoNu"r ndx
AG Soma" j1g")
reno
7-14 cm layer
0-7 cm layer
0.5
0.4
- m
0.3
14-21
21-28 cm layer
cm layer
0.2
0.1
0
Figure 4-13: Landscape characteristics of focus area 1 at the Harvard Forest. Top row:
sand fraction (left), clay fraction (center), and elevation (right). Bottom row: land
cover (left), retrieved aboveground biomass (center), and topographic moisture index
(right). The bottom two rows show the retrieved soil moisture in the 0-7 cm (top
left), 7-14 cm (top right), 14-21 cm (bottom left), and 21-28 cm layers, respectively.
103
I.
E
Clay Frmcbon
Sand FrM*W
m)
pW
-
Co
"and
AG om.
Type
E
ai
"M
Top
(OMSfa)
Molm"u
hodx
F~
7-14 cm layer
0-7 cm layer
0.5
0.3
21-28 cm layer
14-21 cm layer
0.2
0.1
I
I.
m
."
0
Figure 4-14: Landscape characteristics of focus area 2 at the Harvard Forest. Top row:
sand fraction (left), clay fraction (center), and elevation (right). Bottom row: land
cover (left), retrieved aboveground biomass (center), and topographic moisture index
(right). The bottom two rows show the retrieved soil moisture in the 0-7 cm (top
left), 7-14 cm (top right), 14-21 cm (bottom left), and 21-28 cm layers, respectively.
104
Se~
E*vataonlml
COy Froa~n
Fr.c?~
leamo
AG Sf*mas
Lane Co*W Type
Topo
(AI
EvdFore
D*W Forest
2
~out
10
200
'U'
i
o
Z5
S u
yend
0-7 cm layei
7-14
cm layer
0.5
0.4
0.3
14-21 cm layer
21-28 cm layer
0.2
0.1
0
Figure 4-15: Landscape characteristics of focus area 3 at the Harvard Forest. Top row:
sand fraction (left), clay fraction (center), and elevation (right). Bottom row: land
cover (left), retrieved aboveground biomass (center), and topographic moisture index
(right). The bottom two rows show the retrieved soil moisture in the 0-7 cm (top
left), 7-14 cm (top right), 14-21 cm (bottom left), and 21-28 cm layers, respectively.
105
0.50.450.4E
-
0.35
E
0.25
E
0.2
-
0.15
0.1-
60-70
50-60
90-100
80-90
70-80
Sand Fraction
7 cm layer soil moisture retrieval for different
-
Figure 4-16: Boxplot of average 0
sand fraction classes.
0.5k
E 0,4&i
IB
B
S
E 0.4
0.35
*;
-
*'
0.3
I
E 0.25
0.2
E
6 0.15
I
I
I
S
-J
5-6
6-7
8-9
7-8
I
9-10
>10
A
tanG
Figure 4-17: Boxplot of average 0 - 7 cm layer soil
topographic moisture index classes (in m).
106
moisture retrieval for different
4.5
Discussion and Conclusions
The backscattering coefficient associated with a variable soil moisture profile can differ
significantly from the backscattering coefficient associated with a uniform profile with
soil moisture equal to the mean profile value. Thus, for low-frequency microwave SAR
measurements of soil moisture that measure a significant depth into the soil (such as
P-band measurements or L-band measurements over very dry areas), it is necessary
to invert the backscatter model for different values of soil moisture at multiple depths
in order to obtain in accurate retrieval. However, in the absence of multi-angular
or multi-frequency data, the associated inversion is generally underdetermined and
therefore ill-posed. This can be mitigated by introducing additional information based
on hydrologic linkages within the profile to reduce the degrees of freedom in the
inversion process.
Specifically, one can regularize the cost function to include an
additional term that penalizes profiles that deviate significantly from the expected
covariance structure. In this paper, this approach was tested using a year of simulated
daily SAR measurements, including simulated speckle, at P-band.
The simulated
data were parameterized to reflect the measurement frequency of the current NASA
AirMOSS mission to measure root-zone soil moisture using P-band SAR.
Retrievals from an unregularized, underdetermined retrieval are highly sensitive to
noise and will fluctuate excessively, both between measurements and between depths,
due to overfitting. The retrieval problem may be made well-posed by inverting only
a single average soil moisture, such that two unknowns (soil moisture and roughness)
are determined by two measurements. However, errors will result from missing the
soil moisture variability, particularly shortly after rain events or during extended drydowns, when the soil moisture difference between layers is especially high. Additional
errors result from phase effects at the transition between layers and the reducing
soil moisture sensitivity with depth, which combine to make the total backscattering
coefficient a highly variable function of the soil moisture profile (see also Chapter
3). Regularization avoids both of these problems and leads to stable and accurate
retrievals, as indicated both by the visual quality of the retrievals.
107
Further improvements to the regularized retrieval algorithm are possible. For example, for applications in which timeseries data are available, observations from multiple days could be combined to estimate the soil moisture roughness height, making
the assumption that it is constant in time (Kim et al., 2012). A host of possible
improvements are possible if vegetation parameters must be retrieved, including regularization of multiple vegetation properties based on allometric relationships or the
use of an additional regularization relationship between vegetation water content and
soil moisture. However, the aim of this chapter is not to advocate for or create a single
optimal retrieval algorithm for use in particular mission, but rather to test the use of
regularization more generally. The experiments performed here show regularization
can be an effective method to enable the retrieval of multi-layer soil moisture profiles
without overfitting even from single-angle and single-frequency data. The dependence
on the structure of the covariance matrix sometimes causes soil moisture profiles to
be overly constrained. That is, although it prevents the retrieval of highly variable
profiles due to overfitting, it also occasionally unfairly penalizes natural variability
of the profiles that is not reflected in the covariance structure. For example, while
surface and deeper soil moisture values are often positively correlated, there may be
little correlation shortly after a rainfall event, when the infiltration front has not yet
reached the deeper soil moisture layers. Regularization-retrieved soil moisture values
will lead to a retrieval of profiles that are too wet at depth, as the weaker signal
from the deeper dry layers is not enough to overcome the penalty from statistics that
reflect the fact that soil moisture at different layers usually shows a large correlation.
This problem could be avoided by making the structure of the covariance matrix
state-dependent, as commonly done in the meteorological literature (known as flowdependence) (e.g. Bannister, 2008). Future work should study the potential improved
in soil moisture retrieval from using state-dependent regularization statistics.
108
Chapter 5
Vegetation Optical Depth and Albedo
Retrieval using Time Series of
Dual-polarized L-band Radiometer
Observations
5.1
Introduction
Our ability to close the Earth's carbon budget and predict feedbacks in a changing
climate depends on knowing where, when and how much carbon dioxide and water
vapor is exchanged between the land surface and the atmosphere. Both these fluxes
are intimately tied to vegetation: roughly 60% of global land evapotranspiration fluxes
occur through plant-mediated transpiration (Schlesinger and Jasechko, 2014), and
vegetation photosynthesis response to increasing CO 2 concentrations is the biggest
carbon cycle feedback in climate models (Ciais et al., 2013; Schimel et al., 2014).
Microwave radiometric data at L-band are sensitive to both vegetation characteristics
and soil moisture. In particular, radiometric observations are sensitive to vegetation
optical depth (VOD). Passive soil moisture retrieving satellites at L-band like the
NASA Soil Moisture Active Passive (SMAP) (Entekhabi et al., 2010b), the ESA Soil
109
Moisture and Ocean Salinity (SMOS) (Kerr et al., 2012), and the NASA/CONAE
Aquarius-SAC/D (Le Vine et al., 2007) must properly account for the effect of VOD
on observations in order to accurately retrieve soil moisture. Furthermore, microwave
VOD estimates have previously been shown to be useful indicators for understanding
vegetation state and variability, complementing the information provided by optical
indices (Andela et al., 2013; Poulter et al., 2014; Zhou et al., 2014). VOD is also
a potentially useful tool for crop monitoring (Patton and Hornbuckle, 2013) that
could help detect crop water stress before optical sensors can ( Van Emmerik et al.,
2014). VOD is directly proportional to total vegetation water content (VWC), with
a constant of proportionality that is dependent on frequency and canopy structure.
Since total VWC is related to biomass (it influences the amount of available storage
for water), VOD has been used as an indicator of biomass in the past (e.g.
Liu
et al. (2015)). However, since vegetation water content also varies depending on the
soil water availability (even in the absence of changes in biomass), VOD can also
be interpreted as an indicator of vegetation water content useful for studying plant
responses to hydrologic stress.
The VOD measured by passive microwave sensors is an integrated measure of vegetation water content and structural effects. The total VOD is always less sensitive
to the lower canopy layers than to the upper canopy layers, although the exact rate of
attenuation of the microwave signal depends on the canopy. The rate of attenuation is
also frequency-dependent ( Ulaby et al., 1986b), although few studies have been done
comparing the effect of frequency on the measured VOD. If differences in canopy penetration between observations at different frequencies are ignored, different satellites
can be combined into a single long-term record of VOD (Owe et al., 2008; Liu et al.,
2011). Such an existing record has been used as a vegetation indicator complementary to optical indices (Shi et al., 2008; Andela et al., 2013). VOD retrievals from
recently launched L-band radiometers such as SMOS and SMAP could be used to
extend long-term multi-frequency VOD records (van der Schalie et al., 2015). Additionally, vegetation water content, and thus the amount of plant stress inferred
by measuring vegetation water content, generally varies throughout the canopy (e.g.
110
(Hellkvist et al., 1974; Bohrer et al., 2005; Janott et al., 2011)). Studies of vegetation
water content based on remote sensing may thus be better served by using VOD from
lower frequencies such as L-band, which attenuate less quickly and are more sensitive
to lower canopy layers. Furthermore, the development of VOD datasets and of joint
VOD and soil moisture retrieval algorithms at L-band is of interest because of the
greater soil sensing depth of these frequencies.
Several approaches exist for the simultaneous retrieval of vegetation optical depth
and soil moisture that is necessary at L-band. Both variables can be simultaneously
derived from a snapshot of measurements by using information from observations
at both horizontal and vertical polarizations (Jackson et al., 2002; Meesters et al.,
2005). However, because the two polarizations are closely correlated, such a retrieval
is sensitive to noise, as will be further explained in Section 5.2. If multi-angular data
are available, such as in the case of SMOS, these can be used to further constrain
the retrievals (Cui et al., 2015). Alternatively, observations from multiple overpasses
can be combined into a single retrieval. Such a multi-temporal approach rests on the
assumption that vegetation state as reflected in VOD is likely to change more slowly
than soil moisture, and is constant over adjacent overpasses.
The use of a timeseries approach also allows for the retrieval of the single-scattering
albedo, the amount of power scattered by the vegetation cover. The value of albedo
is often assumed to be independent of polarization and constant as a function of land
cover (Van de Griend and Owe, 1994; O'Neill et al., 2012; Kerr et al., 2011). Its values are often close to zero
( Wigneron et al., 2004).
A correctly chosen effective value
of the single-scattering albedo allows accounting for higher-order scattering effects,
which are especially important over moderate to dense vegetation cover (Kurum et al.,
2012a). Many of the land-cover dependent values used in the literature are therefore
in some sense fitting-parameters ( Wigneron et al., 2004; Kurum, 2013). However, a
land-cover dependent assignment is sensitive to errors in the land cover classifications,
as well as to variations in albedo within a certain land cover type. A sensitivity study
has shown that errors in assumed albedo adds more uncertainty to single-incidence
angle VOD and soil moisture retrievals than errors in soil and canopy temperature,
111
soil roughness, or bias or noise in observed brightness temperature (Davenport et al.,
2005).
The ability to retrieve albedo directly rather than relying on assumptions
about its value may therefore significantly improve both VOD and soil moisture retrievals.
In this chapter, I introduce a new multi-temporal algorithm for simultaneous
retrieval of vegetation optical depth, single-scattering albedo, and soil dielectric constant using dual-polarized single incidence-angle observations at L-band frequencies.
The method is referred to as the Multi-Temporal Dual Channel Algorithm (MT-DCA)
and tested using three years of L-band passive observations from the Aquarius sensor. The paper is organized as follows. Section 5.2 motivates the need for a timeseries
algorithm to avoid compensating errors when retrieving multiple parameters from a
snapshot of dual-polarized observations. Section 5.3 describes the algorithm design.
The testing methodology and datasets used in this paper are described in Sections
5.4 and 5.5, respectively. Retrieval results are shown in Section 5.6 and discussed in
Section 5.7.
5.2
Algorithm Motivation
5.2.1
Classical retrieval approach
Almost all radiometric soil moisture retrieval approaches are based on the so-called
T-W
model, a zeroth-order solution of the radiative transfer equations describing the
emission of the land surface
TP=
Tffi' +
T 'nopy
= TS (1 - rp) - + T(1 - W) (1 - Y) (1 + r,7y)
(5.1)
The TB, is the brightness temperature at polarization p, which is either horizontal (H)
or vertical (V), T, is the effective land surface temperature, rp is the rough surface
reflectivity, and T, is the canopy temperature.
The quantity -y is the vegetation
transmissivity, T, is the canopy temperature, and w is the vegetation single-scattering
112
albedo, the fractional power scattered by the vegetation.
The vegetation transmissivity -y accounts for attenuation of the emission through
the vegetation layer. It is related to the vegetation optical depth,
y = exp
(VOD\
cos)
(5.2)
(_Cos 0
where 0 is the measurement incidence angle. When the VOD equals 0, there is no
vegetation attenuation on the microwave emission from the soil and the corresponding -y is 1. The VOD increases with vegetation density; over dense vegetation, -y
approaches 0 and the microwave emission is dominated by vegetation. VOD is commonly assumed to be linearly proportional to vegetation water content (Jackson and
Schmugge, 1991; Van De Griend and Wigneron, 2004),
(5.3)
VOD = b -VWC,
where the constant of proportionality b depends on the vegetation structure.
The rough surface reflectivity can be decomposed as rp = r* exp(-hcos(O)n),
where r* is the reflectivity of the flat (smooth) soil, h is the roughness parameter,
which is assumed to be linearly related to the root-mean-square surface height of the
soil surface, and n is an angular value (Ulaby and Long, 2014). The Fresnel equations
relate r* to the complex dielectric constant k of the soils, which is in turn governed
by soil moisture and soil texture.
Most soil moisture retrieval algorithms rely on the same (or an equivalent) mathematical problem. In order to determine the vector of unknown parameters X from a
set of observations, the mismatch between the observed (Tvbs) and modeled brightness
temperatures (Tmo'dI (X)) is minimized,
X = min J =
E
(T obs - Tmodel
2 ,(5.4)
p=H,V
where p represents the polarization.
There are a variety of algorithms that differ in how many observations are com113
bined - whether the sum over polarization is included or whether additional summations are made over different incidence angles, frequencies, or overpasses - and in how
many unknowns are included in X. The cost function in (4) can also incorporate
additional terms to account for a priori information on the unknown parameters and
its associated uncertainty (Piles et al., 2010), which is the solution adopted for the
SMOS L2 processor (Kerr et al., 2011). Soil moisture is a key unknown and is always
retrieved. By contrast, additional parameters such as h, w, and VOD can be either
assigned dependent on some ancillary information or retrieved alongside soil moisture.
5.2.2
Timeseries motivation
In order for the retrieved values to be stable - that is, insensitive to measurement noise
- the algorithm cannot have more unknowns than the degrees of freedom provided
by the measurements considered. If this requirement is not met, the global minimum
of the cost function in Eq. (5.4) will be overly sensitive to measurement noise or
small imperfections in the radiative transfer model. For the SMOS satellite, multiple
incidence angles are used to obtain additional degrees of freedom (Kerr et al., 2012).
For data where only a single frequency and incidence angle is available, either a
so-called single-channel algorithm using a single polarization (e.g. (Bindlish et al.,
2015)) or a dual-channel algorithm (DCA) using both the horizontal and vertical
polarizations (e.g. (Jackson et al., 2002)) can be used. A commonly used variant
of the traditional dual channel algorithm is the Land Parameter Retrieval Model or
LPRM (Owe et al., 2008). It uses only the H-polarization in the cost function, but
also uses the V-polarization as an additional piece of information by algebraically rearranging the tau-omega model to provide a direct relationship between k and VOD
(Meesters et al., 2005) that is a function of the multi-polarization difference index
(Owe et al., 2001). For both the traditional DCA and LPRM, two polarizations are
used to retrieve two unknowns.
Because the horizontally and vertically polarized brightness temperatures are
highly correlated, there is duplicate information in the two measurements.
This
duplicate information reduces the ability of a DCA or similar algorithms to robustly
114
retrieve two parameters in the presence of measurement or modeling noise and adds
errors to the retrievals (Konings et al., 2015). This is illustrated in Figure 5-1. The
background colors show the cost function, as a function of VOD and k, for a sample
set of observations. The perfect retrievals would be those leading to the minimum of
the cost function, indicated by a black dot. Small amounts of noise (AeH = 0.005,
Ae,
=
-0.002) are added to the 'observed emissivities' to simulate observational or
model noise. The cost function contours of the noisy observations are overlaid as
black lines and the new solution (and associated retrievals) is shown as a red triangle. This example shows that even small amounts of noise cause large shifts in
the observed solution due to compensation between VOD and k along the diagonal curvature of the cost function. For only a single polarization the cost function
moves up and down by a far smaller amount than the distance between the true
and noisy solutions (not shown), but retrieving two variables simultaneously allows
compensation between the two. This leads to large errors in retrieved VOD and k.
Konings et al. (2011) performed an observing system simulation experiment (OSSE)
in which the errors associated with different retrieval algorithms were tested over an
area representing the United States by using known truth conditions and simulating
observations with realistic parameterization, model, and observational errors. Both
the bias and random errors of retrieved soil moisture increased several fold for a dualchannel algorithm relative to a single-channel algorithm due to compensating errors.
This is consistent with the effect of observational errors tested in a smaller-scale OSSE
(Crow et al., 2005), where dual-channel algorithm errors were also significantly higher
than single-channel algorithm errors.
The problem of compensating errors can be reduced by using additional observations to increase the 'Degrees of Information' (the fractional degrees of freedom)
(Konings et al., 2015) in the data used. The use of additional observations makes
the retrieval problem less sensitive to noise. For sensors like SMAP where only a
single incidence angle and frequency is available, this can be achieved by combining
measurements from different overpasses. If the time between different overpasses is
sufficiently short, vegetation properties can be assumed constant across the differ115
1.
0.8
0.2
0
10
20
30
k
Figure 5-1: Cost function J as a function of VOD and k for a sample set of observa0
tions (July 16th, 2012, for a pixel centered at 19.48 N, 103.53"W in Central Mexico).
The 'true' solution of the cost function (without noise added) is shown by a black
dot. A small amount of simulated noise is added to the observations, 0.005 for the
H-pol and -0.002 for the V-pol. The contours of the resulting noisy cost function are
shown as black lines. The noisy solution of the resulting cost function is shown by a
red triangle and is far away from the true solution.
116
ent overpasses. This assumption has also been used to improve multi-angular soil
moisture retrievals from SMOS ( Wigneron et al., 2000; Kerr et al., 2011). The soil
dielectric constant varies much more rapidly than vegetation and must be retrieved
separately for each overpass. Adding each additional overpass therefore increases the
number of (correlated) observations by two, but the number of unknowns by only one
(by assuming the same VOD, the only extra unknown is the new k).
5.3
5.3.1
Algorithm Design
Moving window timeseries design
For each retrieval, the timeseries algorithm proposed in this work combines all observations within a moving window and retrieves a single value of VOD along with
N different values of the dielectric constant k, where N is equal to the number of
overpasses within the moving window. Thus, the retrieval is the solution to,
N
2
(e0 od -oel(X)) .
(5.5)
mi
X=VODlk1,....kN
J(X) =
e
t=1
p=H,V
The MT-DCA algorithm retrieves N+ 1 independent parameters (1 x VOD and N x k)
with 2 x N observations (H x N and V x N). Increasing N increases the number of
measurements available for the retrieval, but also increases the possible errors from
changes in VOD over the time period spanning the observations (e.g. violations of the
assumption that VOD is constant across the N overpasses). The optimal choice of N
is thus the minimum value such that the 2 x N observations provide enough information to determine N + 1 parameters. Because the H- and V-polarized emissivities at
any given pixel and time are correlated, however, they contain duplicate information
and do not provide 2 full degrees of information for the retrieval. Instead, the measurements provide some fractional number of 'Degrees of Information' (Dol). The Dol
is less than two by an amount depending on the non-linear correlation between the
polarizations. It can be estimated using the normalized mutual information between
117
the Aquarius-based polarized brightness temperatures. Here, the H- and V-polarized
data together contain 1.86 Degrees of Information (Konings et al., 2015). Using measurements at independent days provides 1.86 x N DoL. The Dol provide an upper
bound on the number of parameters that can be estimated robustly from a given set
of observations. Depending on the forward model and algorithm implementation, this
bound may or may not be reached.
To find the minimum N that allows robust retrieval, the ratio of the total degrees
of information divided by the total number of unknowns can be used. That is, the
retrieval ratio RR = 1.86. N/(N + 1). If RR is greater than 1, the retrieval algorithm
is expected to be robust to noise. Fig. 5-2 plots RR for several values of N. The
Dol and the resulting RR are also separately calculated for each land cover type.
Because the non-linear relationship between the polarizations varies between land
cover classes, the relationship between the two is weaker when data from multiple
land cover types are combined. The DoI and RR therefore increase when calculated
across all pixels rather than only those of a single land cover type. A choice of N = 2
is enough to get robust retrievals (RR > 1), so two overpasses are combined for this
application.
At each pixel, two different values of VOD are retrieved for each overpass: once
when the current overpass is the first of two in the moving window, and once when it
is the second. Similarly, k is retrieved twice for each overpass and pixel depending on
the location of the moving window. In each case, the two possible window positions
are averaged to provide a single dataset of VOD and k. The two possible retrievals
for each k (estimated from different multitemporal windows associated with each
overpass) will later be compared as a consistency check. Since Aquarius has a revisit
time of 7 days (see Section 5.5.1), retrievals are only performed when there are at
least two coincident observations in 14 days. This filters out times when missing data
might otherwise affect the validity of the assumption that VOD is constant between
data takes.
118
1.2
rr
*
.
.*
.
.
.
.
-------- - - - - - - - ----
-
*
*Z
.
.
.
*
0
*
0
0
*
1.2
0
*
*
1.4-
*
1.6
c 0.8
0.4
- N = 1 overpasses
- N = 2 overpasses
- N = 3 overpasses
0.2
- N = 4 overpasses
- N = 5 overpasses
'O
'k
Figure 5-2: Retrieval ratio of degrees of freedom for the different land uses and varying
number of dual-polarized observations
5.3.2
Albedo retrieval
Since the albedo is sensitive to canopy architecture and influences the retrieved values
of VOD and k (Davenport et al., 2005), it is beneficial to retrieve its value directly
instead of using an assumed dependence on land cover type.
Such an assumption
is sensitive both to errors in land cover classification (mostly based on optical data)
and to vegetation variability within land cover types. It is possible to set up a retrieval approach wherein three overpasses are combined to retrieve 3 values of kt, a
constant VOD, and a constant w. Such an approach has an RR > 1. However, the
results illustrate the fact that the DoI only provides an upper bound that is not
always reached - VOD and albedo compensate for each other significantly, leading
to temporal fluctuations in retrieved albedo that are unrealistically large relative to
its dynamic range and to its spatial variations (results not shown). The reason for
such compensation can be understood by examining Eq.
(5.1).
The total bright-
ness temperature can he separated into two components Ti" = T'(1 - 'r(k))y and
is small relaTW noy = Tc(1 - w)(1 - -y)(1 + rp(k) 1 ). If the contribution from TW"
tive to the total and T"
nf"
dominates, the functional form of the effect of both w
119
and -y (which is a monotonic function of VOD) on the observed TB is the same. It
becomes impossible to distinguish between w and VOD, causing large fluctuations in
each. Figure 5-3 shows the relative contribution of the TW"nOPY to the total brightness
temperature under different w and VOD. The contribution of TW"I to the total TB
is often small, especially over wet and heavily vegetated soils. This explains why
allowing albedo to vary leads to unrealistically large temporal variations in both w
and VOD.
0.2
0.18
0.9
0.16
0.8
0.14
0.7
0.12
0.6
a 0.1
0.5
0.08
0.4
0.06
0.3
0.04
0.2
0.02
0.1
0
0.8
0.4
1.2
0
Figure 5-3: Relative contribution of the vegetation canopy to the total brightness
temperature emitted at H-polarization, T"7Hy IT-H as a function of albedo W and
VOD. A value of k = 20 is assumed. Results at V-polarization are qualitatively
similar (not shown).
Instead, albedo is assumed constant ( Van de Griend and Owe, 1994; Wigneron
et al., 2004) and retrieved separately across the full record of observations (and alongside time-varying VOD and k). The retrieval of albedo is robust for a given pixel if the
total Dol across the M VOD - k retrieval pairs throughout the timeseries (M - DoI- N)
is greater than the total number of unknowns (1 + M(N + 1)). If two consecutive
overpasses per VOD - k retrieval pair are used (N = 2), this requirement is met if
more than two VOD - k retrievals are available (M > 2). If the total number of
available retrieval pairs M < 2, no retrievals are attempted. Otherwise, all available
observations for a given pixel are combined to find w. The constant value of albedo
120
is chosen that minimizes the sum of the optimal cost function for each retrieval pair,
=
i
fmin
J
= min
-p=1
b -
minkt,k2 tvoDt
Todel (X))
t=1 p=H,V
_p=l
(5.6)
5.3.3
Additional parameters
The land surface temperature is determined from ancillary data as described in Section 5.5. In this paper, we further retrieve k from the rough-surface reflectivity for
validation of the overall algorithm. The roughness parameter h is assumed to be
equal to 0.13, the average of the different land-cover dependent values assumed by
SMAP (O'Neill et al., 2012).
5.4
Methods
The MT-DCA algorithm is applied to three years of data from the NASA Aquarius sensor. While an alternative version of MT-DCA could be build that retrieves
soil moisture directly instead of the soil dielectric constant k, here we retrieve soil
dielectric constant in order to estimate parameters that are entirely independent of
ancillary data (such as soil texture), which might contain errors. A similar approach
was previously used by de Jeu et al. (2014). The search space for k is limited between
2.5 and 35, values that were chosen based on the Mironov dielectric mixing model
(Mironov et al., 2004) for a range of soil types. For VOD, the search space is limited
to values between 0 and 1.3 nepers. Validation of the resulting VOD retrievals using direct ground-based measurements of vegetation water content is difficult, as no
regional monitoring networks exists at the spatial scale of the Aquarius satellite. Vegetation water content is highly spatially variable, so that any in situ measurements
that cover only a small fraction of the total Aquarius instrument field-of-view scale
cannot be considered representative. It is therefore difficult to directly validate VOD
data. Instead, the spatial patterns of the retrieved datasets are examined for physical
121
realism. Additionally, several focus pixels are chosen that represent relatively homogeneous land cover conditions (measured using the Gini-Simpson index (Simpson,
1949) on the discrete land cover classes, as proposed in Piles et al. (2015) and a wide
variety of climatic and land cover conditions. One of the SMAP Core Cal/Val sites
(SMAPEx)is also chosen as a focus pixel. The specific location and dominant land
cover type of each focus pixel are included in Table 5.1. The temporal dynamics of
each of these focus pixels are compared to the temporal dynamics of precipitation
over the same area, which is expected to have a strong influence on vegetation water
content in many regions. The MT-DCA VOD retrievals are also compared to those
from the commonly used LPRM algorithm (Owe et al., 2001; Meesters et al., 2005;
Owe et al., 2008). In order to be able to distinguish algorithm differences from differences in frequency or sensor characteristics, the LPRM algorithm is implemented
and applied to the Aquarius observations as the MT-DCA. For LPRM, w
=
0.06 is
assumed, based on the value in Owe et al. (2001).
Table 5.1: Target areas: name, location, dominant IGBP land cover type, and coefficient of determination R 2 between time series of mean Aquarius and SMOS k
retrievals.
Site name
SMAPEx
Amazon
Latitude
34.70 OS
2.23 0S
Longitude
145.73 0 E
66.00 W
Land cover
Open Shrubland
Evergreen Broadleaf Forest
Nordeste
7.30
42.63 OW
Savanna
Pampas
33.82
60.17 OW
Cropland
East Africa
Central Asia
West Africa
5.49 0S
45.27 ON
9.68 0 N
34.50 OE
66.30 OE
6.37 OE
Woody Savanna
Grassland
Natural Vegetation Mosaic
0S
0S
Since Aquarius provides radar and radiometer collocated observations, this study
also explores the relationship between Aquarius MT-DCA VOD and two alternative
active vegetation indices. Because soil scattering generally leads to negligible depolarization (Van Zyl and Kim, 2011), the cross-polarized backscattering coefficient can be
used as an index of vegetation scattering intensity and water content. Alternatively,
Arii et al. (2010) defined the Radar Vegetation Index (RVI), which is a measure of
the randomness of canopy elements and vegetation scattering.
122
Although the retrieved VOD dataset is the primary focus of this study, the MTDCA retrievals are further evaluated by analyzing the retrieved values of w and k.
The spatial and temporal patterns of the retrievals of k are also compared to those of
LPRM. To avoid contamination from differences in assumed soil texture and dielectric
mixing, the retrievals of the dielectric constant k are compared rather than the soil
moisture estimates. The two are monotonically related. Lastly, a consistency check
is performed on the k retrievals. For each date and location, two retrievals of k are
obtained - one when the current date is the first in the two-overpass window, and one
when it is the second. The two sets of retrievals are compared to test the robustness
of the retrievals.
Soil roughness is often assumed to depend on land cover type, as in the SMAP
retrieval algorithm (O'Neill et al., 2012) or retrieved from additional information, as
done by SMOS (Kerr et al., 2011). In this study, we use a globally constant soil
roughness value of h = 0.13 and n = 2, the average of the land-cover dependent
values used in the SMAP retrieval algorithm (O'Neill et al., 2012). Using a globally
constant value allows the algorithm retrieval test to be independent of any possible
errors in ancillary land cover data. Thus, any spatial patterns in Figures 5-4 and 5-6
are a direct test result of the data retrievals and not of ancillary data. Sensitivity
tests showed that the exact value of soil roughness used had only a minor effect
on the retrieved VOD and albedo values (not shown). To isolate the effects of the
unique albedo and VOD retrieval assumptions of the MT-DCA, the same roughness
assumptions are used for both the MT-DCA and LPRM implementations.
The different datasets used for these analyses are described in Section 5.5. All
datasets are converted to the same gridding scheme and spatial resolution, which is
chosen to match the Aquarius observations. Since Aquarius measurements do not
exactly overlap over time, the first 7 days of observations are used to set up the
grid. Subsequent overlapping footprints with centers less than 0.15 degrees from a
grid center are included in that grid cell, otherwise they are excluded. More detailed
information on the gridding strategy can be found in McColl et al. (2014) and Piles
et al. (2015). To enable spatial and temporal consistency, all data sets used in this
123
work have been resampled to the Aquarius footprint grid: land-cover classification
data (used in interpreting the results only) is resampled using the most common
land cover class, while ancillary precipitation and temperature data are resampled
using linear averaging. When converting datasets with a higher spatial resolution to
the Aquarius gridding scheme, a circular orbital footprint is assumed, with a radius
dependent on latitude. Note that the land cover data are only used in the analysis of
the results, not in the retrieval algorithm itself.
5.5
5.5.1
Datasets used
Aquarius Level 2 data
The Aquarius/SAC-D mission, launched in June 2011, is a joint U.S.-Argentinian
mission to map the surface salinity field of the oceans from space. It has equatorial
crossing times of 6 A.M. (descending) and 6 P.M. (ascending) and a 7-day repeat cycle. Its payload includes the NASA Aquarius sensor, the first combined active/passive
polarimetric L-band microwave instrument in space. It consists of three L-band radiometers and a scatterometer, which image the Earth in a pushbroom fashion at
29.360 (inner beam), 38.49' (middle beam), and 46.29' (outer beam) incidence angles, with 3 dB footprints of 76 x 94 km, 84 x 120 km and 96 x 156 km. (Le Vine
et al., 2007).
The present study uses three years of global Aquarius Level 2 data (version 2.0),
covering the period from September 1st, 2011 to August 31st, 2014. Dual-polarized
brightness temperatures (TBH and TBv) from the middle beam acquired during morning (descending) overpasses are used for joint VOD, k, and w retrievals. Coincident
cross-polarized backscattering coefficients (UHV) are also selected to explore their relationship with retrieved VOD. Only data from morning overpasses are used to ensure
the vegetation and near-surface soil are in thermal equilibrium. Data from the central beam is chosen since, out of the three available beams, the greatest amount of
independent information can be obtained from the center-most angle at 38.49', which
124
is also the closest to SMAP's incidence angle. Radar and radiometer data have been
screened for orbital maneuver times and Radio Frequency Interference (RFI) Le Vine
et al. (2014). In addition, data over ocean, land-sea transitions, Antarctica, Greenland and non-vegetated surfaces (water, urban and barren land covers) have been
masked out.
5.5.2
NCEP land surface temperatures and flags
The land surface temperature T provided as auxiliary information with Aquarius data
is used as an input retrieval parameter in the present study. They are obtained from
the National Centers for Environmental Prediction (NCEP) Global Data Assimilation
System (GDAS) and interpolated from the daily 0.25' product to the exact time and
location of the Aquarius observations. Pixels with land surface temperatures less than
00 C were assumed to have frozen soils and masked out of the analysis. Similarly,
pixels where the observed emissivity was greater than one were assumed to have an
erroneous land surface temperature and masked. Lastly, locations and times where
NCEP data suggest the presence of snow or ice cover were also removed from the
analysis.
5.5.3
MODIS IGBP land cover
The 2005 MODIS MCD12Q1 International Geosphere-Biosphere Programme (IGBP)
collection 5 landcover product has been used in this study to characterize the dominant land cover within each Aquarius footprint. The MODIS IGBP land cover is a
world-wide product at 500-m spatial resolution that encloses 17 distinctive land cover
classes.
MODIS products are freely distributed by the U.S. Land Processed Dis-
tributed Active Archive Center (www.lpdaac.usgs.gov). Note that land cover data
are only used to interpret the results and not within the retrieval algorithm.
125
5.5.4
MERRA-Land observation-corrected global precipitation
-
Global daily precipitation from the Modern Era Retrospective Analysis (MERRA)
Land run (Reichle et al., 2011) have been used in this study, with additional corrections applied to match the data from the Global Precipitation Climatology (GPCP)
project and the NOAA Climate Prediction Center (CPC) (Reichle and Liu, 2014).
5.5.5
Water fraction
The observed brightness temperatures from Aquarius are corrected for the effect of
emission from surface water bodies. The NCEP Land Surface Temperature is assumed
to be equal to the temperature of any water bodies in the pixel, whose brightness
temperature Tter is calculated using the model of Klein and Swift (1977) with
an assumed salinity of 0.5 parts per thousand.
bodies in the pixel
f,
The fractional coverage of water
is then used to separate the land emission and water emission
contributions to the Aquarius observations. It is assumed that Tbs
=
fw
7
at'e +
f.)Tland, which can be re-arranged to solve for Tj1lnd. The static water fraction
(1-
fw
is
determined by calculating what fraction of the high-resolution 250 m land cover data
from the MODIS MOD44W dataset are classified as water or land. The data are first
aggregated to the 3km EASE grid used in the SMAP Testbed and then converted
to the Aquarius footprint grid. Pixels with more than 10% static water cover were
removed from the analysis entirely.
5.6
5.6.1
Results
VOD retrievals
A global map of three-year time-average Aquarius VOD retrievals using the MT-DCA
is shown in Fig. 5-4. The spatial patterns of VOD retrievals follow global vegetation
distributions, with the highest vegetation optical depth in tropical and boreal forests
and low VOD in arid climates.
Across the Sahel, there is a gradient of increasing
average VOD from North to South. Fig. 5-4 also shows the mean VOD obtained
126
by applying the LPRM algorithm. The spatial patterns of the two VOD temporal
means are generally consistent except over densely forested areas. The difference over
densely forested areas may partially be occurring because valid LPRM retrievals are
so rare in these regions that the time-average VOD of LPRM is capturing a different
subset of the seasonal cycle than the annual average of MT-DCA. Across the globe,
LPRM predicts a negative VOD for 11% of retrievals, which is physically impossible.
These occur predominantly over dry, lowly vegetated ecosystems. Indeed, for regions
where MT-DCA predicts a VOD less than 0.1, more than 50% of all LPRM VOD
retrievals are negative. These unphysical values occur because the LPRM assumes
a fixed relationship between k and VOD based on an exact equality of the
T
- W
model in both polarizations. In reality, noise and model error (including, for example,
an imperfect w specification) may mean that there is no perfect solution to both
equations, so after a least-error value of k is found the accompanying VOD may not
be physically realistic. For a relatively coarse resolution (90 km footprint) satellite
like Aquarius, this may be especially common. The occurrence of negative VOD
retrievals at L-band is consistent with a previous C-band application of LPRM in
which switching from soil moisture retrievals with possibly noisy soil texture values
to soil dielectric constant retrievals increased the number of valid VOD retrievals by
as much as 200 days a year, again predominantly over dry areas (de Jeu et al., 2014).
In this paper, LPRM-retrievals that predict a negative VOD are removed from the
comparison. For an additional 10% of observations with valid MT-DCA retrievals,
including many over the Amazon and Congo river basins, LPRM retrievals are not
made because they have a MPDI of less than 0.01 (Meesters et al., 2005).
To gain further insight into the behavior of the MT-DCA retrievals, their temporal
dynamics are compared to those of LPRM VOD retrievals and of precipitation (an
expected strong predictor of VOD in several areas) for several focus pixels in Fig. 5-5.
All datasets are shown at a weekly temporal resolution, equal to the average revisit
time of the Aquarius satellite. In cases where there is significant seasonal variability
in precipitation, the retrieved VOD is responsive to accumulated precipitation and
consistent with expected seasonal changes in vegetation water content. For example,
127
1.2
0.8
0.6
-IL
0.4
0.2
Figure 5-4: Global maps of mean MT-DCA (left) and LPRM (right) VOD retrievals
for the three year period of this study.
a clear seasonal cycle is evident in the VOD retrievals over West Africa, Nordeste,
and East Africa, where VOD shows a steady decline after the end of the rainy season.
In each of these sites, there is a lag between the end of the rainy season and the
minimum value of VOD. This suggests that VOD is sensitive to changes in vegetation
water content accompanying the plant response to water stress and/or to changes in
leaf biomass - the response of vegetation to a reduction in (stochastic) rainfall is not
instantaneous. For most target regions, the LPRM VOD shows more high-frequency
variability than the MT-DCA VOD. Although it is possible that the constant VOD
assumption in the MT-DCA slightly dampens natural variability, the near-oscillatory
behavior of many of the high-frequency LPRM retrievals suggest that they are due
to retrieval noise rather than due to true variability in the signal. Such differences
in temporal behavior occur over much of the globe, as shown in Figure 5-6. For
both MT-DCA and LPRM, the standard deviation is shown after the 5-week moving
window mean is removed. This moving window subtraction acts as a high-pass filter,
and the remaining variability is more likely to be retrieval noise than true temporal
variability in the signal. The MT-DCA high-frequency variability is significantly lower
than that of LPRM for much of the globe. The high-frequency variability of the L2
VOD from SMOS (which uses multi-angular measurements and a prior estimate of
VOD based on leaf area index) (Kerr et al., 2011) is about halfway between that of
MT-DCA and that of LPRM (not shown).
The availability of both active and passive data from Aquarius allows a preliminary
128
cEntral
0
2
-12
30-
Asia
~~~MRain~fa11--LPRM VOD
--
TDAV
0.5
25-
0.4
E20-0
.0
:06>
9
1510
!04
M16
10. 1
-
M04
0
01114
01113
01112
0
0.30
1
01)13011
0112
Afr
NordsteEast
20
20r
'_15
E
.301
010-
01/13
01112
0.4
02
01)12
v01/12
01/14
01/13
01114
SMAPEx
Pampas
20
S
0.4
-0.5
W
05
15
15
-0.4
E
-0.30
0
1 10
30
I..
1/1NI3
01)12
01/12
01/13
.2
.9
0.
AQ
I
.210>
>ii b
0113011
01)1
01/13
01112
01114
01114
West Atma
3j
0.5
f1
L1J5
04
10(1
0.I
L
%
0
12
01/12
0
i
-
01/13
W/12
01/14
Figure 5-5: Time series of weekly mean MT-DCA VOD, LPRM VOD, and precipitation over focus pixels. Note the different axes scale for the Amazon series.
0.1
p0
0.08
0.06
p
40
0.04
M46I
0.02
4A
Figure 5-6: Global maps of standard deviation of MT-DCA (left) and LPRM (right)
VOD retrievals for the three year period of this study. In both cases, a 5-week moving
average is first removed from the timeseries for each pixel, so that the standard
deviation primarily reflects high-frequency variability
129
0
investigation of active and passive vegetation indices. Figure 5-7 compares Aquarius
MT-DCA VOD data to coincident
OHV
and RVI observations by showing the joint
density of the two for all locations and times. The VOD-RVI joint density (R 2 = 0.46)
is more flat and has longer tails than that of VOD and
cTHV
(R2 = 0.76).
That
is, there is more scatter in the relationship between VOD and RVI than in that
between VOD and
OHV.
This suggests the latter may hold more promise as an
active-microwave-based predictor of VOD for single-channel soil moisture retrieval
approaches.
However, some saturation in the
0
HV may be occurring for densely
vegetated sites.
200
1.22
8
1.2
180
1
7
160
1
140
0.8
0.8
120
0
0
100
>0.6
> 0.6
80
0.4
0.2
-
3
60
0.4
.40
0.2-
20
0
0.02
0.04
0.06
0
00
0.2
0.6
0.4
0.8
10
RVI
cHV
Figure 5-7: Joint density of Aquarius radiometer-derived vegetation optical depth
vs. scatterometer (THV in linear units (left) and radar vegetation index (right). All
available combinations of active and passive measurements (e.g. one at each location
and time) were used.
5.6.2
Albedo retrievals
Table 5.2 shows the average retrieved albedo values for each land cover type, as well as
the average parameters assumed in the SMAP passive-only retrieval algorithm. The
retrieved values are generally lower than the land-cover dependent values used by
SMAP as well as the globally constant value of 0.06 assumed by LPRM (Owe et al.,
2008), consistent with theoretical findings that higher-order scattering reduces the
130
effective albedo values used in the tau-omega model (Kurum, 2013). Albedo values
are generally higher for vegetation covers with significant woody components, such
as forests and woody savannas. However, there is significant variability in retrieved
albedo values across and within land cover class. Grasslands, croplands, open shrublands, and savannas show particularly large amounts of variability within each class
relative to the class average. For open shrublands, this variability appears to be due
to differences between the tundra regions and shrublands in less densely vegetated
areas.
Table 5.2: Land cover variability of retrieved albedo w. Parameters for SMAP W are
obtained from O'Neill et al. (2012)
Land cover type
Evergreen Needleleaf Forest
Evergreen Broadleaf Forest
Deciduous Needleleaf Forest
Deciduous Broadleaf Forest
Mixed Forest
Closed Shrublands
Open Shrublands
Woody Savannas
Savannas
Grasslands
Croplands
Cropland/Natural Veg. Mosaic
SMAP w
0.12
0.12
0.12
0.12
0.10
0.05
0.05
0.12
0.08
0.05
0.05
0.065
Retrieved w : mean (std. dev.)
0.05
0.05
0.06
0.03
0.05
0.03
0.05
0.04
0.02
0.03
0.04
0.02
(0.02)
(0.03)
(0.02)
(0.03)
(0.03)
(0.04)
(0.05)
(0.03)
(0.03)
(0.05)
(0.04)
(0.03)
A global map of the retrieved constant albedo values is shown in Figure 5-8.
Not surprisingly, the spatial patterns of albedo roughly follow those of average VOD
and of expected vegetation cover, although there are a few more noisy high-albedo
outliers. In general, the transition between low and high vegetation regions is more
rapid for albedo than for VOD, as can be seen for example in Northern Africa. This
is consistent with the apparent sensitivity of albedo to woody biomass; average VOD
trends may be capturing smaller-scale spatial variations in leaf cover that albedo is
insensitive to.
131
0.2
0.15
0.1
*
0.05
0
Figure 5-8: Global map of retrieved albedo
5.6.3
k retrievals
For each date and location, k can be retrieved at either the start or the end of the
moving window. A global map of the time-average of the instantaneous difference
between the two sets of k retrievals is shown in Fig. 5-9. The difference is generally
small, as confirmed by the figure inset, which shows the overall distribution of differences. The standard deviation between the differences is only 1.54 and there is no
significant bias (mean Ak = 0.10). The similarity between the two sets of k confirms
the robustness of the algorithm for soil moisture, VOD, and albedo retrievals.
Figure 5-10 shows the mean retrieved k for both MT-DCA and LPRM. The
MT-DCA dielectric constants are slightly higher (wetter soils) than those of LPRM
for much of the globe. In regions such as southeastern China, Russia, Scandinavia
and Bolivia/Matto Grosso, there is significantly more spatial variability in the mean
LPRM retrievals than in the MT-DCA ones. Over much of the Amazon and Congo
basins, LPRM retrievals are not valid because the MPDI is not sufficiently large
(Meesters et al., 2005). There are a few pixels in the Amazon where the average
LPRM k is much higher than for MT-DCA, but this is probably a mixture of higher
LPRM retrievals and the fact that LPRM retrievals are not valid during many times
of the year, so that the two averages may represent different seasonal cycles. When
132
I
3
2
1
0
I
0.5
-1
-2
0-
-3
Figure 5-9: Mean difference between the two sets of k retrievals
the LPRM algorithm is applied to Aquarius with albedo values from MT-DCA instead of the LPRM assumed value of 0.06 (Owe et al., 2008), the difference in average
k reduces to near-zero values for the vast majority of pixels (not shown), suggesting
that the ability to retrieve albedo is an important component of the MT-DCA algorithm for soil moisture retrievals. The effect of the albedo assumption is smaller for
VOD retrievals than for k retrievals, but also significant.
I
I130
20
10
0
Figure 5-10: Global maps of temporal mean k retrieval for Aquarius (left) and SMOS
(right)
Time series of MT-DCA and LPRM k retrievals over the focus pixels for the
study period are shown in Fig. 5-11. The temporal dynamics of retrievals from
both algorithms are very similar, though there is a slight bias between the two in
many cases. In the Amazon pixel, the seasonal cycle in soil dielectric constant is
133
considerably larger than that of VOD (Figure 5-5), consistent with the fact that
forests in this region access deep stores of groundwater (Baker et al., 2009). Long
drydowns in West Africa and Nordeste occur more slowly for MT-DCA than for
LPRM, though it is difficult to say which is more accurate at these large scales.
--Amazon
-
-
Central
Asia
-- 4
____20
UMRanWaI-.LPRMA k
-(T Ok
3015
30
20
0
110-
110
-
10
5i1
10-20
10
01112
3O
10
20
30
15
20-
2
10
for
01/14
01/13
01/12
scale
over focus-pixels.-Notethe-dWest Afit
20
402,-4
01/14
01/13
01/14
01/13
01/12
30
220-
-40
20SMAPEx
.4
15
-----
15L
01/14
01/13
-Pampas
20
-
20
3 0_
01/14
01/13
01/12
-40
1530
01/12
20
0114
01/13
01/12
20 r
40O
-
Amao-s-r4
15
s
30
10
0
0112
01/13
01/14
Figure 5-11: Time series of weekly mean MT-DCA k, LPRM k, and precipitation
over focus pixels. Note the different axes scale for the Amazon series.
5.7
Discussion and Conclusions
A new method, the Multi-Temporal Dual Channel Algorithm (MT-DCA), is proposed
to retrieve microwave vegetation optical depth (VOD), the effective single-scattering
albedo w, and soil dielectric constant (monotonically related to soil moisture) from
time-series of dual-polarized L-band radiometer observations. It is applied to three
years of Aquarius data at L-band. The algorithm relies on the premise that vegetation
134
changes more slowly than soil moisture. A moving average window is used to combine
observations from two overpasses while retrieving only a single constant value of VOD
alongside the dielectric constant for each of the two overpasses.
Single-scattering
albedo is assumed to be constant in time and optimized separately across the full
record of observations. Note that when soil moisture conditions are similar during
the two overpasses, observations from the second overpass do not provide additional
information and can lead to noisy retrievals.
For Aquarius applications, using 3
overpasses or more leads to a moving window size of 21 days or more, over which
the assumption of constant vegetation may not hold.
For other satellites with a
more frequent revisit time, using a slightly longer window can increase the chance
that soil moisture conditions change significantly during the moving window time
period, adding additional information to the measurements. Future work is needed
to investigate whether such variations can improve the quality of MT-DCA retrievals
for other satellites such as SMOS and SMAP, whose more frequent revisit time is
likely to lead to improved performance of MT-DCA. Another limitation of the MTDCA algorithm is that it cannot capture sudden changes in VOD such as those that
might be induced by fire or deforestation during the time when the moving window
passes over the destruction event. However, such an event may still be detectable
with some delay when there is a large change in VOD over a small number of moving
windows.
The proposed multi-temporal algorithm retrieves microwave scattering albedo
alongside VOD and soil dielectric constant rather than requiring an a priori assumption on its value based on land cover as is commonly done. This not only improves
the quality of the VOD and k retrievals, but also allows simultaneous retrieval of
the effective single-scattering albedo. Albedo is assumed to be constant in time,
consistent with prior literature and the fact that it is strongly dependent on canopy
architecture. With the exception of the retrievals in Rahmoune et al. (2013), which
are limited to forests, albedo has previously only been determined using airborne or
tower-based field campaigns with limited spatial coverage. The retrieved values of
single-scattering albedo are low, but non-zero. The albedo is largest across land cover
135
conditions with significant woody components. The forested regions in South America
are found to have a lower albedo than those of the Northern Hemisphere, consistent
with Rahmoune et al. (2013). In almost 95% of cases, the retrieved albedo value is
lower than the value that would have been assigned by the land cover-based parameterization in the SMAP ATBD (O'Neill et al., 2012). There are large variations in
albedo even within a given land cover class, suggesting the common assumption of a
land-cover based albedo value is rather poor. Indeed, for the closed shrublands, savannas, grasslands, croplands, and cropland
/
natural vegetation mosaic classes, the
variability of albedo across land cover is larger than its average value. When LPRM is
run with albedo values retrieved from the MT-DCA, much of the difference in dielectric constant retrievals disappears. Although it is difficult to validate the retrievals
in this paper, given the likely errors in prior assumptions of albedo, the significant
effect of albedo on k retrievals suggests that the ability of MT-DCA applications to
retrieve it alongside other variables is a major advantage.
Global VOD spatial patterns from MT-DCA correspond well to those obtained
using LPRM on average, but differ significantly in dynamic range and temporal behavior. The new VOD estimates have temporal dynamics that are consistent with
precipitation and prolonged dry-downs, and both canopy water retention and biomass
drying and wilting processes are reflected in the VOD retrievals. This confirms that
VOD is a vegetation indicator that can be complementary to well known visible infrared indices such as NDVI or LAI. The MT-DCA Aquarius retrievals of VOD show
significantly less high-frequency temporal variability due to noise than those from
LPRM applied to Aquarius brightness temperature data. Additionally, because of
the fixed relationship between VOD and k assumed by LPRM in the presence of
noisy observations, LPRM retrievals lead to unphysical predictions of negative VOD
or invalid retrievals in 16% of cases. The MT-DCA does not suffer from this problem.
At higher frequencies, brightness temperatures are less sensitive to soil moisture
and have less penetration through the canopy than at L-band. Nevertheless, retrieval
algorithms using temporal snapshots are still prone to measurement noise. Using
a method with timeseries such as the one proposed in this paper may also lead to
136
some improvements in VOD retrieval accuracy at C, X and Ku-bands. The VOD
represents an integrated value over the canopy, weighted depending on the rate of
attenuation of the signal through the canopy. This attenuation rate is dependent on
both the frequency band of the measurement and the canopy properties themselves.
As a result, the canopy properties and height ranges that dominate the signal at a
given frequency band vary by location. This complicates interpretation of VOD data,
as water stress in both branches and leaves as well as canopy structure (which affects
the b-parameter) both vary with canopy height. Additional work is needed to better
understand the effect of measurement frequency on VOD retrievals and interpretation.
Overall, VOD estimates obtained using the proposed algorithm have temporal
dynamics that are generally consistent with precipitation and prolonged dry-downs.
Both canopy water retention and biomass drying and wilting processes are reflected
in the VOD retrievals. This suggests optical-infrared indices such as NDVI or LAI,
which are not directly sensitive to vegetation water content, are a poor basis for VOD
in soil moisture retrieval algorithms.
Indeed, other studies of VOD (Jones et al.,
2011; Lawrence et al., 2014) have found that the end-of-season VOD variability is
distinct from the signal found in optical-infrared vegetation indices. By contrast, a
comparison of MT-DCA VOD with collocated radar observations
(JHV)
shows there
is a strong relationship between the two microwave measures of vegetation. The
UHV
is a better predictor of VOD than RVI (Figure 5-7). This may be relevant to the
design of multi-resolution active-passive vegetation retrievals from upcoming SMAP
data. SMAP plans to use Normalized Difference Vegetation Index (NDVI) climatology from MODIS as ancillary dataset for VOD in its baseline soil moisture retrieval
algorithm. With the proposed algorithm, SMAP independent VOD retrievals could
be used to improve SMAP soil moisture retrievals. This study further suggests that
cross-polarized backscatter signals, which will be gathered at higher spatial resolution
than radiometric measurements by SMAP, can carry information that may be helpful
in providing effective VOD over the SMAP radiometer footprint based on information
from the higher spatial resolution radar. The proposed method could be applied to
SMOS and SMAP L-band data to better quantify the contribution of the vegetation
137
to total emissivity and therefore improve soil moisture retrievals.
138
Chapter 6
On the Seasonal Behavior of
Microwave Vegetation Indices
6.1
Introduction
Active (radar) and passive (radiometer) measurements are sensitive to both soil moisture and vegetation. In both cases, vegetation scattering and attenuation is sensitive
to both the amount of water contained within the vegetation and to structural factors (e.g. shape and size distributions of different components).
In past studies
employing microwave vegetation indices, active cross-polarized backscatter measurements have generally been interpreted as sensitive to biomass (Le Toan et al., 1992;
Mitchard et al., 2009; Englhart et al., 2011) or to both biomass and water content
(Asefi-Najafabady and Saatchi, 2013; Saatchi et al., 2012; Woodhouse et al., 2012).
Passive VOD measurements have been previously interpreted as sensitive to either
total biomass (Liu et al., 2015; Guan et al., 2014) or plant water content (Zhou et al.,
2014; Andela et al., 2013; Poulter et al., 2014). The two are related - as aboveground
biomass increases, total aboveground vegetation water content does too.
Under a given vegetation cover, both active and passive measurements are about
equally sensitive to soil moisture (e.g. Du et al., 2000). The differential sensitivity
of active and passive measurements to the vegetation properties themselves is less
well-studied.
Radar backscattering coefficients increase with biomass initially but
139
saturate at high biomass values. At least over forests, model simulations have shown
that the emissivity signal saturates less rapidly than the backscattering coefficients
do relative to biomass (for some assumed deciduous forest structural/allometric set
of properties) (Ferrazzoli and Guerriero, 1996). By contrast, based on case studies
across a 200 latitude transect and using clustering approaches for land cover detection, Prigent et al. (2001) concluded that passive measurements are less sensitive to
vegetation than active measurements (without the ability to specify relative to what
exact parameter). A better understanding of the similarities and differences between
the behavior of active and passive measurements is needed to be able to determine
which measurement type is preferable for different ecological applications.
The derivation of a new VOD dataset from Aquarius in Chapter 5 creates, for
the first time, coincident active and passive vegetation indices. This enables a direct
comparison of vegetation indices derived from each measurement type without contamination from sensor, frequency, or orbital differences between different active-only
or passive-only satellites. In this chapter, the temporal dynamics of active and passive
vegetation indices from Aquarius are compared to test whether any systematic differences occur. Based on the results in Chapter 5,
OHV
is used as an active vegetation
index rather than the Radar Vegetation Index, which is susceptible to contamination
from soil moisture.
6.2
VOD and c-HV are out of phase in several regions
As shown in Figure 5.7, when compared across all locations and times, VOD and
UHV
are positively correlated.
However, when using global scatterplots such as in
Figure 5.7 (and such as also often made between VOD and optical indices, e.g. Liu
et al. (2011)) it is difficult to separate measurement noise from true differences in
dynamic behavior between related but substantially different factors (e.g. leaf greenness compared to biomass). Here, we explicitly compare the temporal dynamics of
the two indices. Figure 6-1 shows the correlation between temporal fluctuations of
VOD and O-HV at each pixel. As expected, there are several regions of high temporal
140
1
50
0.5
0
0
-
-50-
-150
-100
50
0
-50
100
150
Figure 6-1: Pearson correlation coefficient between uHV and VOD for all global pixels
for which there are at least 50 valid weekly VOD retrievals in three years.
correlation. These are particularly common in highly water-limited regions such as
the Sahel, Southwestern US, Australia, and Southern Africa. This is consistent with
expectations - in more water-limited regions, the vegetation behavior is more likely
to respond to seasonal variations in water availability, creating a stronger seasonal
cycle that is detected in both VOD and uHV.
Perhaps most striking are the re-
gions of highly negative correlation near Angola and Zambia and in parts of Brazil.
The high magnitude of the negative correlation there suggests that noise alone is
unlikely to be responsible for the differences in behavior between the two microwave
vegetation indices in these regions - they must be sensing at least partially different
canopy properties. Figures 6-2 and 6-3 show the correlation between each of
OHV
or
VOD and precipitation for areas where gHV and VOD show very different behavior
(RUHV-VOD
<
-0.5).
In most of these regions,
9HV
approximately follows the sea-
sonal cycle of precipitation, but VOD does not. Within the abovementioned regions of
coherent spatial patterns, two types of behavior occur. In Africa and Eastern Brazil,
oHV closely tracks precipitation while VOD does not. In the western part of the
Brazilian region of interest, neither microwave vegetation index tracks precipitation
141
particularly closely, but neither are they strongly out of phase with precipitation.
1
-
~M
50
0.5
r.
0
A
V
-50k
-150
-100
-50
0
Figure 6-2: Pearson correlation coefficient between
with R.HV-VOD < -0.5.
50
0
100
-0.5
-1
150
-HV and precipitation for pixels
P1
S-P2
P3
SOP50-_
1
0.5
-1
0
0
-0.5
-50k
-150
-100
U
OU
I1UU
I OU
-1
Figure 6-3: Pearson correlation coefficient between VOD and precipitation for pixels
with RHV-VOD < -0.5. . Black symbols represent the locations of the pixels shown
in Figure 6-4.
142
Sample timeseries for one representative pixel in each of the three regions mentioned above are shown in Figure 6-4. The pixel locations are marked in Figure 6-3.
To further understand the differences in signal between the two microwave indices,
they are also compared to timeseries of the Enhanced Vegetation Index (EVI) (Huete
et al., 1994). The EVI is a version of the commonly used Normalized Difference Vegetation Index (NDVI), modified to reduce atmospheric corrections and to avoid the
saturation evident in NDVI datasets. The NDVI is a normalized ratio of the nearinfrared and red spectral-band reflectances ( Tucker, 1979). This ratio is proportional
to chlorophyll abundance in the plant canopy (Sellers, 1985; Myneni et al., 1995) and
thus correlates well with photosynthetic capacity. Like all optical data sources, EVI is
susceptible to the presence of clouds. Widely distributed EVI products from MODIS
represent 8-day periods to ensure the occurrence of cloud-free days and reduce noise in
the measurements. At the coarse resolutions of Aquarius, it is very rare for an entire
0.900 footprint to be covered by clouds. Furthermore, the native MODIS resolution
(250 m) is several orders of magnitude higher than that of Aquarius. Instead of using
the standard product with high spatial resolution and coarse temporal resolution, the
raw MODIS reflectances are used to calculate a daily EVI at coarse spatial resolution
and produced at the same footprint gridding system used for the Aquarius data. For
P3, EVI data are often missing due to the high frequency of cloudy conditions during
the wet season and are not included in Figure 6-4.
The timeseries are consistent with the patterns expected based on the correlation
coefficients in Figures 6-1-6-3. In each of the regions, there is a strong dry season,
which is most pronounced for P1 (top row). For each of the three pixels, approximately the same seasonal pattern occurs across the three year record, although the
start of the increase in VOD occurs a little later in the wet season for the second year
of P3 than for the other two years. Near the transition from wet to dry season the
VOD increases, coming to a maximum value within the dry season before declining
again after the start of the wet season. For P1, the VOD starts to decrease at the
very start of the wet season, during the first weeks of low rain. For P2 and P3, it does
not decrease until later in the wet season. Generally, the seasonal increase in VOD is
143
relatively rapid at first and then increases more slowly. By contrast, the
aHV
starts
to decline as the wet season transitions to the dry season, and does not increase again
until the rainfall increases again. For P1, the decline at the beginning of the dry
season gives way to a period of near-constant orHV until the subsequent wet season,
even as EVI continues to decline. For P2 (center), both EVI and -HV decline slightly
over the entire duration of the dry season. For P3, rainfall, VOD, and OHV are all out
of phase with each other, and the timeseries (especially that of
JHV)
appear to be a
lot noisier than the analogous ones for P1 and P2. This is consistent with a rapid
response to rainfall in the dry season, given the fact that the P3 dry season has more
rain events than those of P2 and P1.
6.3
Possible explanations
The large differences between the seasonal cycle of VOD and that of OrHV and precipitation over several regions is surprising. While there might be differences in the
sensitivities of active and passive measurements that cause differences in their dynamics, there are no clear reasons why VOD should show related but opposite behavior
to precipitation, aHV, or EVI. Several hypotheses to describe these observations are
described below.
6.3.1
Dry season bud break and leaf flushing
For many tropical dry ecosystems, the emergence of new leaves and shoots has been
observed during the dry season (e.g. Singh and Singh, 1992; Eamus, 1999; Hutyra
et al., 2007; Holbrook et al., 1995). The VOD measurements may be sensitive to this
dry season biomass growth, as also previously theorized about Ku-band backscatter
in African evergreen forests near the Equator (Guan et al., 2013). The difference
in behavior between VOD and a-HV might be explained by their differing sensitive
to leafy and woody biomass.
Using the MIMICS radiative transfer model ( Ulaby
et al., 1990) parameterized to represent trembling aspen (a deciduous species) at
L-band, Steele-Dunne et al. (2012) found that aHV was about equally sensitive to
144
-0.06
0.6 a 0.40
,-0.04
.-
-0.02
0.2-
0
Sep11
Sep12
Jan12
Jan13
,O
Sep13
Mrainfall
Jan14
-VOD
0.61
0.04
-EVI
0.03
-
cHV
Y
r=
0.4
0
0.02
0
7
0.2
-0.01
.1
.M -
QL
Sep11
1.' >
Jan12
I
Sep12
Jan13
Sep 1 3
I
Jan14
-
[I
0
0 0
0.07
0.065
C
0.06
0
0.055
-S
2Se p12
Sep13
Jan1 3
Jan14
0.05
Figure 6-4: Timeseries of rainfall and vegetation indices for P1 (top), P2 (center),
and P3 (bottom), respectively. The P1-P3 locations are marked in Figure 6-3. For
each timeseries, the average weekly VOD (blue line), JHV in units of power (green
line), EVI (red line), and rainfall (histogram) are shown.
145
branch gravimetric water content as to leaf gravimetric water content (their figure 9f).
For passive measurements, however, using a field theory based model, Ferrazzoli and
Guerriero (1996) found that the effect of leaves on the total emission is relatively small
at L-band. Additionally, cylinder-like shapes are predicted to be primarily absorbers,
increasing VOD, while more disc-like shapes like leaves can decrease emissivity and
VOD (Ferrazzoli and Guerriero, 1996) (consistent with observations over agricultural
fields at higher frequencies (Ferrazzoli et al., 1995).
These findings are consistent
with a dry season loss of leaves (which are more disc-like) and leaf flushing during
the wet season, along with the occurrence of the growth of new shoots or buds (more
cylindrical) during the dry season. For passive measurements, the effect of the leaf
loss is relatively small but shoot growth and bud break increase VOD during the dry
season. Since aHV is more sensitive to leaves, the loss of leaves during the dry season
may dominate its overall seasonal variability, explaining why
c-HV
decreases during
the dry season. The attribution of the increase in VOD to bud break and shoot
growth are also consistent with the dry season decrease in EVI, which is primarily
sensitive to chlorophyll not visible until leaves open.
There are some unanswered questions about this possible explanation. The expected timing of bud break and leaf fall are only partially consistent with the seasonal
dynamics of VOD - each of P1, P2, and P3, shows a decline in VOD at the start
of the wet season, but no such early leaf-fall has been observed using ground-based
measurements. For P1, the timing of the VOD increase and decrease is particularly
closely linked with the wet/dry season transition. Of the 9 pixel-years shown in Figure 6-4, the dry season in 2013 for P3 is the only one where VOD increases the most
rapidly in the middle of the dry season rather than at the very beginning. By contrast, many of the species that flower or show bud break during the dry season do
so in the middle of the dry season (Holbrook et al., 1995). Similarly, leaf abscission
is generally observed during the dry season, while declines in observed VOD in the
pixels of Figure 6-4 and other similar locations tend to start during the wet season
only.
Attributing seasonal fluctuations in VOD and O-HV to changes in biomass only is
146
also at odds with the fact that the largest dry season increase in VOD occurs in P1
(difference of about 0.3 nepers instead of 0.1-0.2 nepers), both in absolute terms and
relative to its average VOD value. One would generally expect to see the greatest
seasonal variability in forested areas and less so in more grassy areas. While P2 and
P3 are evergreen forests and woody savannas, respectively, the land cover in P1 is
more grassy - based on optical data, the woody fraction of the P1 pixel (a savanna)
is only around 0.5 (Guan et al., 2014). This hypothesis is therefore most likely to
apply to P2 and P3 - and the regions they represent - than to P1, whose seasonal
cycle also shows the clearest correlation with rainfall occurrence (and thus the most
conflict with mid-season changes in phenology observed in the ecological literature).
6.3.2
Litter
Additional contributions could be coming from wet litter in the dry season. In temperate regions, litter has previously been shown to increase L-band emissivity (Kurum
et al., 2012b; Grant et al., 2009) and decrease L-band backscattering (De Roo et al.,
1991). This suggests that litter is present for much of the dry season in these regions
and might therefore be decomposing relatively slowly. Such an observation is consistent with previous ground-based studies that have observed reductions in litterfall
decomposition rates during the dry season ( Wieder and Wright, 1995) in Panama,
but would be the first large-scale observation of this effect across large areas of dry
tropical regions.
6.4
Conclusions
As shown in Chapter 6,
YHV
and VOD are positively related across much of the globe.
The Pearson correlation coefficient was calculated for each pixel in order to compare
the temporal dynamics of VOD and
UHV.
The regions with the highest correlations
between VOD and UHV are often semi-arid, consistent with the fact that semi-arid
climates are expected to have the strongest seasonal cycle in vegetation water content.
In several dry tropical regions, the seasonal dynamics of VOD and JHV show
147
a strong negative correlation. This is counter to expectations, but the strength of
the negative correlation suggests it cannot be attributed to noise and may provide
new information about ecosystem behavior in these regions. In particular, in the
Angola/Zambia region and in the southwestern regions of Brazil, VOD increases
during the dry season but aHV does not. This may be due to the effect of budbreak and shoot growth during the dry season that is causing the increase in VOD,
coupled with a loss of leaves causing the decrease in
CHV.
The occurrence of dry
season litterfall is also consistent with this seasonal behavior. Neither of these two
behaviors has previously been observed at large scales. They are largely consistent
with ground-based observations, although questions remain about why the increase in
VOD starts closer to the start of the dry season rather than towards the middle, which
is usually observed in the ecological literature. While these are possible explanations
for the observed signal in the South American regions, they cannot provide the sole
explanation for the observed signals in Zambia, which has less woody vegetation.
Additional research is needed to validate the hypotheses of dry season bud break
and litterfall as explanations for the differing seasonal dynamics of VOD and
UHV
in
the South American regions, and to establish the relative contributions of each of the
two hypothesis to the total signal in regions where they are out of phase. Additional
research is also needed to determine why the behavior shown in these regions is not
shown elsewhere in woody regions with significant dry seasons.
Nevertheless, the
magnitude of the behavior shown in Figure 6-4 strongly suggests that active and
passive vegetation indices can provide complementary information that could lead to
new insights about the seasonal ecological variations of tropical dry ecosystems.
148
Chapter 7
Variations in Diurnal Canopy Water
Content Refilling with Water Stress
7.1
Introduction
In Chapter 5, it was assumed that the vegetation properties that affect microwavefrequency measurements (vegetation water content and canopy structure) are approximately constant over the time span of two overpasses, i.e. over an 8 day window for
the Aquarius satellite. The validity of this assumption depends on the fact that each
of the satellite overpasses occurs at approximately the same local time of day. Vegetation water content follows a strong diurnal cycle (e.g. Brodribb and Holbrook (2004))
that is much larger than the expected day-to-day variability at a given time of day
over the span of a few days. This variability occurs because water is lost at the leaves,
but replenished through the roots - the water needs time to move from the roots to
the canopy. Thus, the diurnal cycle of the stored vegetation water content represents
the integral of the difference between transpiration and root uptake rates. The canopy
water storage is maximized in the early morning and minimized in the early afternoon. The process of replenishing water lost to transpiration is often termed refilling.
Several studies have found that the refilling time seems to increase with water stress.
That is, under relatively drier conditions, water moves more slowly across the vegetation. For example, in dry oak trees at the Tonzi Ranch (near the Vaira Ranch site
149
studied in Chapters 3 and 4, Fisher et al. (2007) found that during the dry summer
season the proportion of nighttime sap flux increased. Similar patterns have been
observed in a freestanding C 3 - CAM tree species (for which CAM photosynthesis is
induced by drought) (Herrera et al., 2008), and in laboratory measurements of young
oak trees (Ehrenberger et al., 2012). Insofar as nocturnal refilling (like daytime refilling) is driven by gradients in water potential between the roots and the leaves (e.g.
(Cavender-Bares et al., 2007)), low soil moisture may reduce these gradients. Additionally, drought stress often leads to reductions in xylem hydraulic conductivity due
to embolism (Sperry and Tyree, 1988; Tyree and Sperry, 1989; Sperry et al., 2002).
However, it is not clear how often these effects are significant, how widespread this
phenomenon is, or how much it varies at the stand level or larger scales. Observationdriven studies are challenging because direct measurements of total vegetation water
content are difficult. In analogy with gravimetric measurements for measuring soil
moisture, plant samples weighed before and after drying can allow calculation of component water content, but this requires destructive sampling. Dendrometers can be
used to measure stem water content through radius changes (Zweifel et al., 2001, 2006)
and turgor pressure probes can be used to measure leaf water potential (a function
of leaf water content) (Zimmermann et al., 2008), but each of these requires speciesspecific calibration, and neither captures variations throughout the canopy (Bohrer
et al., 2005). While sap flux measurements are comparatively easy, they require a
complicated hydraulic flow model to scale across the plant, requiring many speciesspecific parameters. Although there has been a concerted effort to create databases
of plant hydraulic traits (Kattge et al., 2011; Medlyn et al., 2011) and multi-species
meta-analyses are becoming more common (e.g. (Manzoni et al., 2011)), knowledge
of these parameters is still limited to a comparatively small number of species.
A larger observational dataset of diurnal variability in vegetation water content
may help increase understanding of variations in refilling time and size. Given sufficient care, refilling time can be studied by comparing vegetation water content measured by microwave remote sensors between morning and evening overpasses. Friesen
et al. (2012) observed diurnal differences in C-band backscatter from the European
150
Remote Sensing (ERS) ERS-1 and ERS-2 satellites that could not be attributable to
soil moisture or azimuthal difference over several regions in the globe. Steele-Dunne
et al. (2012) studied these differences over a single pixel in West Africa and noted
that the diurnal difference increased as the dry season progressed, eventually becoming smaller again near the end of the dry season and disappearing during the rainy
season. Since the low-earth orbit of ERS causes morning and evening overpasses to
occur at approximately the same local time, such an increase (decrease) in diurnal
variability could imply an increase (decrease) in refilling speed, since drier conditions
would normally lead to lower transpirational fluxes and a reduced refilling amount.
However, in both studies, diurnal differences were assessed by aggregating all morning
and evening overpasses in a given month and location and comparing their distributions. Since morning and evening overpasses occurred on different dates, this provides
only a limited capacity to probe the drivers of diurnal variability in backscattering
coefficients.
Using the Michigan Microwave Canopy Scattering Model (MIMICS) ( Ulaby et al.,
1990), Steele-Dunne et al. (2012) also showed that cross-polarized backscattering
coefficients at L-band are primarily sensitive to leaf vegetation water content. In this
chapter, we compare same-day morning and evening cross-polarized backscattering
coefficients measured by the L-band Aquarius satellite in order to determine whether
a) diurnal differences in vegetation water content can be observed at L-band and
b) whether the refilling of vegetation water content depends on water availability.
The morning overpasses (at 6:00 AM) is interpreted as occurring after refilling is
complete but before the onset of transpiration causes a loss in aboveground canopy
water content, while refilling may only be partially complete by the time of the 6:00
PM overpass.
7.2
Derivation of AM and PM VWC
As mentioned in Chapter 5, the Aquarius orbit is not an exactly repeating orbit.
Roughly every 7 days, the Aquarius orbit passes over a previously imaged area, but
151
the footprint centers are usually around 0.100 - 0.25' apart. This is significant relative
to the 0.80' radius of the footprint. Both refilling amounts (e.g. average evapotranspiration and uptake rates under a given set of conditions) and other factors may
vary in space, so this chapter departs from the gridding system previously used in
Chapter 5 and 6 (and originated in McColl et al. (2014) and Piles et al. (2015)). Pairs
of coincident AM and PM observations are formed if their footprint centers are less
than 0.05' apart. This is a conservative requirement. Assuming a footprint radius
of 0.90' (the exact radius is latitude-dependent), this implies that 92% of the area
covered by the two footprints overlaps. Thus, in order for spatial variability alone to
cause a diurnal difference in backscatter AUHV > 0.5 dB, there would have to be a
difference in the diurnal average
c-pQ
of the non-overlapping areas at least 3.33 dB in
size. However, such a constraint means that pairs from different days rarely get close
to overlapping. An additional constraint of day-to-day drift less than 0.30' is used,
implying that the center 0.25' by 0.25' of a grid cell is covered.
Unfortunately, coincident AM and PM observations occur in only a relatively
small set of latitude bands in the Aquarius orbit. Using the restrictions above, only a
handful of footprints remain. They all occur at a latitude of 11.37' N. Their location
is shown in Figure 7-1. Fortunately, the region represents a natural gradient of land
cover and precipitation conditions.
7.3
Soil moisture dependence of diurnal variability
of
6THV
Refilling is not the only factor that can create differences between morning and
evening values of
UHV.
Ascending and descending overpasses view the same location
from a different azimuth angle. Although many flat natural surfaces have azimuthal
symmetry, azimuthal effects can be important in areas of significant topography where
azimuthal angles can influence the apparent incidence angle induced by the surface
slope or whether a surface is shaded (e.g. (Schuler et al., 1999). Faraday rotation
152
Figure 7-1: Locations with same-day morning and afternoon observations whose footprints are less than 0.050 apart.
may vary in time, and oHV is particularly sensitive to the quality of the applied Faraday rotation correction (Freeman and Saatchi, 2004). Although dew has previously
been found to have a negligible effect on L-band observations over wheat (Gillespie
et al., 1990), it may be more significant for other land cover types. The presence of
intercepted water on leaves shortly after rainfall may also obscure the signal. Lastly,
although the UHV is expected to be almost independent of soil moisture in the crosspolarization (Steele-Dunne et al., 2012; Ulaby and Long, 2014), some small influence
may remain. There is at least a small correlation between soil moisture and
UHV
over
much of the globe, although it is fundamentally impossible to determine whether this
is due to a direct scattering influence of soil moisture or due to a correlation about
soil moisture and overall vegetation water content without additional datasets.
In order to better understand whether the diurnal AcHV can be attributed to
changes in refilling, backscatter differences are compared to morning soil moisture
derived from coincident Aquarius radiometer measurements (Bindlish et al., 2015).
If changes in refilling speed consistent with (Steele-Dunne et al., 2012) are responsible, AUHV is expected to decrease with soil moisture. Days when the occurrence of
dew is a possibility are conservatively filtered by removing days when the 6:00 AM
153
relative humidity is greater than 98% (calculated based on 2-m humidity and surface
temperature data from the Modern Era Retrospective Reanalysis - Land (MERRALand) (Reichle et al., 2011). Similarly, combinations where rainfall between the two
overpasses or in the six hours before the morning overpass exceeded 1 mm are also
filtered. The rainfall data used are from the SMAP 'Nature Run', which is also based
on MERRA-Land but has additional precipitation corrections applied (Reichle and
Liu, 2014). All ancillary datasets are converted to the same grid. After such conservative filtering, the remaining pixels occur predominantly in the dry season. Locations
with more than 5% open water content or significant topography are removed from
the analysis entirely.
Figure 7-2 shows the average diurnal variability as a function of soil moisture for
the remaining pixels. The scatter in each of the subplots of Figure 7-2 is likely due
to day-to-day variations in evaporative demand (e.g. humidity and net radiation) or
other factors. For most pixels, AUHV is positive (i.e. the backscattering coefficients
are higher in the morning) - parts of the Kp-based uncertainty range are negative for
only a small minority of points. This is consistent with the theory of an incomplete
refilling amount by the 6:00 PM time of the evening overpass. However, for most
pixels, if any trend is detectable at all, the diurnal difference generally increases with
soil moisture. This is counter to the observation in Steele-Dunne et al. (2012) that
backscattering coefficients increased over the course of the dry season, and counter to
the explanation that this may be happening due to reduced refilling speeds. Alternatively, trends in diurnal differences of vegetation water content may be dominated
by the effect of diurnal differences in soil moisture and their direct influence on
CHV.
Unlike vegetation water refilling, the diurnal difference in soil moisture is expected to
increase with the morning soil moisture value - wetter soils have higher drainage and
evapotranspiration rates.
Interestingly, the only pixel that shows the expected negative relationship between
morning soil moisture and AUHV is also the driest pixel. It has an average precipitation over the three-year study period of 348 mm/yr and is located in Northeastern
Nigeria. The location studied by (Steele-Dunne et al., 2012) is further North and even
154
I
1
I
4
0.5
0.51
2
C
-
-----
---
----------------
0
-
-
0
NGsnea(11T7N. 1062W)
Doianat LC: Sawarma, GSU 0.55
A
Rit 88.1 nun
0
0.1
0.3
0.2
Soi moisture
SE Clwd(1137N, 2W63E)
DomrWnu LC: Savana, GSI: 0.75
Arxef Ran 501
nun
SMUn {11.37N,.7.33hY
D0mrnrt LC: Sawama, GSt 0.54
A'u
04
-05
RUr:59
.O8nmm
'
-0.5
------------
0
0.1
0
0.3
0.2
Soil moisture
0.4
-0.5
0
0.1
0.2
0.3
0.4
Soil moisture
0.5
#f
0
---------------------
'I
0.5 1
U 0.5 1
1-111p f
-41 ----------S Sudan
(1M7, 31.11E)
DonaiMLC Crqand, GS. 0.71
AnmuO
-0.51
0
----------------
RaW. 45a4.8 m
0.1
0.3
02
Sod moisture
SE Niger (t7,3.14W)
SWChrad411 37h, 17.12E)
Da*MT
LC: Mosaic, GSL 0.6
Amusm Rat Sea6nun
j
0.4
0
0.1
0.2
0.3
Sod moisture
DWint LC: Maic, GSI: 0.64
Annum Ran: 353.77 mn
0.4
-0.5.
0
0.1
0.2
0.3
Soil moisture
0.4
15
1
0.5
f
0-----------------
NENIgera(1t37%.13i3E)
Donant LC MOLac, GSL 0.2
Annum Ra31 347 78uam
-0.5
0
0.1
0.2
0.3
0.4
SoA moisture
Figure 7-2: Difference between AM and PM UHV (in dB) vs. radiometer-derived
AM soil moisture for the pixels in Figure 7-1 after filtering for dew and interception.
Errorbars on the differences are based on the Aquarius Kp uncertainty estimates of
the backscattering cross-sections, where additive errors are assumed to be distributed
normally with a standard deviation of KUpaQ. The inset of each pixel shows the
location (country, center coordinates), dominant land-cover, Gini-Simpson index of
land cover, and annual average rainfall, respectively. Pixels are arranged in order of
decreasing averaging rainfall. Pixels where less than three samples remained after
dew and interception filtering, or where more than 0.05% of the covered land surface
area was water, are removed from this analysis.
155
drier (average precipitation of about 250 mm/yr). This is consistent with evidence
from Ehrenberger et al. (2012) that the slow-down in refilling increases super-linearly
with drought stress - e.g. as the drought stress becomes more extreme, the (negative)
derivative of the refilling rate increases in magnitude. However, it must be emphasized
that there are only a handful pixels tested in this analysis, and that the Northeastern
Nigeria pixel itself has only a small number of coincident diurnal pairs remaining after filtering. Furthermore, the non-linear relationship between soil moisture and UHV
may also influence these results.
R2 = -0.73
0.8-
Ug0.7
0.60.5-
0.4
-
0
60.30.2
'
0.1
_0
200
400
600
Avg annual precip [mm]
800
1000
Figure 7-3: Mean diurnal difference of GHV (AM - PM) across days without interception or dew formation (in dB) as a function of average annual rainfall for each pixel.
7.4
Conclusions
Across the gradient of locations shown in Figure 7-1, only limited evidence was found
for the dependence of diurnal variability on soil water availability observed by (SteeleDunne et al., 2012). While there was a diurnal decrease in
cHv
detected in the dry
season across a gradient of pixels in super-equitorial Africa, this gradient increased
with soil moisture for most of the pixels, suggesting that either the behavior of UHV
156
was influenced by factors other than vegetation water content (e.g. diurnal soil moisture variability) or relative refilling over a 12-hour daytime period actually increases
with increasing water stress. That is, the effect of reduced transpiration rates under
increasingly dry conditions (causing less water to need to be refilled) may outweigh
the reduced speed in refilling, if such a reduction takes place. For the driest location
studied, the trend between -HV and soil moisture was reversed, suggesting that water
stress slows down the refilling process only in the driest of environments. However,
note that the difference in average annual precipitation (calculated over the three
years of the Aquarius record) between the driest and second-driest pixel in Figure 7-2
is less than 10 mm, suggesting these results should still be viewed with caution.
All in all, it is difficult to draw conclusive interpretations from the small number
of points studied across the Aquarius gradient. Certainly, seven pixels cannot provide
conclusive evidence, no matter what they show. However, with the recent launch of
the Soil Moisture Active Passive satellite (Entekhabi et al., 2010a) on January 31st,
2015, a new L-band radar dataset has become available. Because of the much higher
swath width and better integration of the instrument integration time with the orbit,
SMAP radar data do have diurnally coincident observations over most of the globe.
Furthermore, at a spatial resolution of 3 km instead of -90 km, the spatial resolution
is almost two orders of magnitude higher for SMAP than for Aquarius. As of the
time of this writing, the SMAP radar record was interrupted after about 2.5 months
(likely due to the high ionospheric activity affecting the instrument) and may only be
relatively short overall. Nevertheless, given the high spatial resolution, it is expected
that the SMAP record can lead to insight even over a short timespan.
The multiple interpretations of the results in Section 7.2 suggest the limitations
of working with o-HV directly. Ideally, a radar scattering model would be used to
calculate some measure of vegetation water content directly. However, most radar
scattering models, including those of Chapters 3 and 4 (e.g. (Burgin et al., 2012;
Truong-LoI et al., 2015)) are highly sensitive to parameters and assumptions describing the structure and density of the vegetation canopy and its components. This
makes them very difficult to parameterize, especially across large spatial areas that
157
may contain a variety of vegetation covers. Perhaps the simplest scattering model
is the so-called 'cloud model', which represents vegetation as a single layer of water
droplets (Attema and Ulaby, 1978). However, even this model relies on three different parameters beyond that describing vegetation water content, as well as additional
soil-specific parameters. Alternatively, a new data-driven method for soil moisture
retrieval from radar backscattering coefficients without ancillary parameters has recently been derived (Narvekar et al., 2015; Bruscantini et al., 2015).
It may be
possible to combine this method with a cloud model and timeseries-based approach
to derive relative vegetation water content amounts over time.
158
Chapter 8
Conclusions and Future Work
8.1
Conclusions
Microwave measurements are sensitive to water content in the soil and plants. As
such, they can provide information relevant for monitoring and understanding changes
to the distribution and availability of water at the land surface (including both within
the soil and within plants). Such information is relevant for predicting changes to
vegetation function and mortality under changing climate and land cover. This thesis
has discussed the development and use of two new datasets from microwave remote
sensing: root-zone soil moisture profiles derived from P-band radar observations and
vegetation optical depth derived from L-band radiometer observations.
Microwave observations include contributions from both the moist soil and vegetation scattering or emission. Using the microwave observations requires that the soil
moisture and vegetation contributions are disentangled through the retrieval process.
In doing so, multiple observations can be combined from different incidence angles,
frequencies, polarizations, or observation times. Many of these combinations of data
are highly correlated and thus contain some degree of duplicate information. As such,
additional measurements do not always lead to a full additional degree of freedom in
the retrieval process. Chapter 2 has introduced a framework to determine the fractional degrees of freedom contained within a set of measurements, termed the degrees
of information. The degrees of information in a set of measurements depends on the
159
shape of its joint probability distribution - duplicate information reduces the spread
of the joint probability distribution. The degrees of information can be calculated
based on an appropriately normalized version of the information theoretic total correlation measure. It is applicable to data with an arbitrary number of dimensions and
sensitive to the amount of duplicate information in the entire distribution without
requiring assumptions on the shape of the data. The degrees of information provide
an upper bound on the number of parameters that can be robustly retrieved from a
set of data without being overly sensitive to small amounts of measurement noise.
Chapters 3 and 4 discuss the retrieval of soil moisture profiles from radar observations in the P-band frequency range. Unlike observations made at higher electromagnetic frequencies, they are sensitive to soil moisture across much of the root zone. An
observing system simulation experiment (OSSE) is used to test the effect of profile
representation on the simulated backscatter. The OSSE consists of a year of hydrologically simulated soil moisture profiles and associated backscattering coefficients
representing the Vaira Ranch near lone, California. The soil moisture profile is represented using several homogeneous slab layers. As the number of layers used increases,
the forward error from misrepresenting the continuously varying soil moisture profile
decreases, although using a more sophisticated moisture-dependent layering system
does not significantly reduce the error relative to using a simpler layering systems
in which all layers have a constant (in time) and equal depth. The error decreases
as more layers are used to represent the profile. Such forward modeling errors affect
the cost function of the soil moisture profile retrieval problem and are thus likely to
propagate to retrieval errors. For some profiles, if a homogeneous halfspace is used to
represent the profile, the equivalent halfspace soil moisture corresponding most closely
to the 'observed' backscattering coefficients may be outside the range of the profile
all together. This is a result of the phase shift induced by subsurface reflections.
Chapter 3 shows that retrieving depth-dependent soil moisture profiles improves the
accuracy of the soil moisture retrieval. Thus, representing the depth-variability of the
soil moisture profile increases not only the hydrologic utility of the retrieved data,
but also reduces the forward modeling error within the retrieval.
160
Using multiple layers to represent the soil moisture profile increases the number
of unknowns above the degrees of information contained in P-band observations.
Chapter 4 introduces a Tikhonov regularization method to increase the stability of
the retrieved soil moisture values. The regularization adds a term to the retrieval cost
function that penalizes possible solution profiles that deviate significantly from the
expected profile, based on the mean profile and inverse covariance between different
layers. This penalizes solutions that are hydrologically unrealistic. The mean profile
and inverse covariance matrix can be determined from either simulations or from
ground-based observations.
The second dataset derived in this thesis is vegetation optical depth (VOD), a
measure of canopy attenuation sensitive to vegetation water content. In Chapter 5,
multi-temporal observations are used to increase the degrees of information above
those contained in a single snapshot of H- and V-polarized brightness temperatures.
The multi-temporal approach relies on the premise that, when observed at the same
time each morning, the temporal dynamics of vegetation are sufficiently slow that
VOD can be assumed constant between two consecutive overpasses. This assumption
also allows the retrieval of the effective single-scattering canopy albedo, avoiding
retrieval errors due to incorrect prior specifications of this parameter. The method
is applied to L-band frequency radiometric observations from the Aquarius satellite.
The resulting retrievals show significantly less high-frequency temporal variability
(the high frequency variability is likely attributable to noise) than state-of-the art
snapshot retrieval methods.
The VOD data derived in this thesis provide coincident active and passive measurements from the same observing platform. These were used to compare the seasonal dynamics of passive vegetation indices like VOD and an active index like aHV,
both of which are expected to be sensitive to vegetation water content. The highest
correlations between VOD and
6-HV
occur in regions with semi-arid climates, where
the strongest seasonal cycle in vegetation water content is expected. In several dry
tropical regions, including the savannas south of Central Africa and several regions
in Southwestern Brazil, the two microwave vegetation indices had opposite seasonal
161
dynamics. This may be attributable to dry season bud break and shoot growth occurring simultaneously with or shortly after leaf fall. If so, this would be the first
large-scale observation of these processes. Additional research is needed to test this
theory.
Chapter 7 shows that microwave vegetation indicators can also be used to study
the diurnal variability of vegetation water content and refilling. The diurnal variability of Aquarius
UHV
was compared to soil moisture across a gradient of land cover
and precipitation in Africa to test the hypothesis (based on laboratory studies) that
refilling speed decreases during times of water stress. Evidence for this was only found
at the driest pixel studied, which has an annual precipitation of less than 250 mm/yr.
8.2
8.2.1
Future Work
Root-zone soil moisture
Chapter 4 introduced a regularization method using the mean and covariance of different profile layers in the retrieval cost function to avoid the retrieval of hydrologically
unrealistic profiles. The method was applied to observations over the Harvard Forest in Western Massachusetts and compared to in situ measurements of surface soil
moisture and spatial patterns. P-band observations are available at 9 other sites, and
the regularization method should be tested on some of these to ensure it is applicable
under a wide variety of conditions. In particular, AirMOSS observations over the
MOISST site in Oklahoma contain multiple strips that observe the same area using
different headings and incidence angles. Regularized retrievals from two same-day
observations of the overlapping pixels could be used to test the stability of the retrievals. Additionally, in August 2015, near-simultaneous observations of the Walnut
Gulch region in Arizona will be made at both L- and P-band. The top layer soil moisture obtained from regularized retrievals from the P-band data could be compared to
L-band retrievals as a further check on the regularization method. Alternatively, the
regularization method could be adapted to ingest both L- and P-band observations.
162
This may increase the vertical resolution with which the soil moisture profile can be
identified.
The method described in Chapter 4 uses smooth-surface reflectivities rather than
the backscatter coefficients that are observed by the radar. The smooth-surface reflectivities are derived from the radar observations using a separate method that relies
on parameters obtained from running a detailed vegetation-structure-based canopy
backscattering model. Such a method is sensitive to the availability of ancillary data
and cannot be applied globally. Furthermore, although it allows a dynamic amount of
biomass that changes from pixel to pixel, the vegetation-structural model applied is
constant across pixels (Truong-LoI et al., 2015). This method uses only the HH-, VVand HV-polarized backscattering coefficients. However, AirMOSS data provide fully
polarimetric observations, which include not only the magnitude of the backscattering but also its phase. Polarimetric models (Lee and Pottier, 2009; Yamaguchi et al.,
2005) could be used as an alternative approach to account for the effect of roughness
and vegetation and retrieve smooth-surface reflectivities.
Such models often treat
vegetation as consisting of some distribution of (randomly or not) oriented ellipsoids.
This reduces the number of unknowns in the vegetation model, allowing them to be
retrieved directly from the polarimetric observations even in the absence of ancillary
information. The Degrees of Information framework of Chapter 2 can be used to
test whether the polarimetric observations contain enough information for such a retrieval. The development of such a retrieval method is already under way at MIT
(Alemohammad, 2015).
The large scale maps of soil moisture produced by applying the regularized retrieval methods can be used to determine the relative controls of landscape characteristics such as topography, land cover, and soil texture on the spatial variability
of soil moisture at different depths. Knowledge of the expected controls on spatial
soil moisture patterns can be used in the development and validation of land surface
models - testing model performance based on physical realism and spatial patterns
rather than simply on their ability to match observations at a given point will reduce
equifinality and other issues (Beven, 1993; Refsgaard, 2000). For the purposes of
163
evaluating the regularization algorithm, Figures 4-16 and 4-17 simply correlated sand
fraction and elevation with soil moisture. In order to make additional progress in
understanding the controls on soil moisture fields at different depths, explicit consideration should be made of the actual spatial patterns in soil moisture. For example,
the connectivity of soil moisture patterns (the probability that two points at a given
distance apart belong to the same cluster, where clusters can be determined using
thresholding) (Western et al., 2001; James and Roulet, 2007) can be compared to the
connectivity of landscape characteristics. The consideration of multiple points simultaneously is less sensitive to the effects of lateral flow than the analysis of figures 4-16
and 4-17, and the use of thresholding allows for studying the relationships between
soil moisture and texture, land cover, and topography under different regimes.
8.2.2
Vegetation optical depth and water content
Chapter 5 developed a multi-temporal algorithm to retrieve vegetation optical depth
and single-scattering albedo, reducing errors from the need to specific albedo a priori. The method was tested on radiometric observations from the Aquarius satellite
in order to allow comparison with co-incident radar data in Chapter 6. However, the
Aquarius observations have a relatively coarse special resolution
(
0.900) and have
shown significant calibration bias and drift (Dinnat et al., 2012; Piepmeier et al.,
2015). Furthermore, the assumption of constant vegetation optical depth across two
consecutive overpasses is likely to be impacted by the relatively long Aquarius revisit time (7-8 days) and the fact that Aquarius does not have a perfectly repeating
orbit. The method could also be applied to data from the SMOS (if adapted for
multi-angular data) or SMAP satellites, which would avoid many of the above disadvantages and create a less noisy dataset.
Furthermore, when the soil moisture
does not change over two consecutive overpasses (such as might happen during an
extended drydown in the absence of rainfall), the two sets of measurements in the
moving window are identical and the second set of observations does not provide any
additional information.
Under such conditions, it might be useful to dynamically
adapt the moving average window length to include three overpasses, increasing the
164
I
..
.11, 1
-
.
1. _
a
.1
- I
.
. -
.
1-~ -1.1 -
1a__-&-&-a" -k"_&.
'_
J-
-
:
11
.
" wuwk
. -
.
1
.1
1
1
1.
111
chance of a change in soil moisture between overpasses. While this is a possibility for
the 3-day revisit orbit of SMAP (9 days total in moving window), the constant VOD
assumption is questionable for three consecutive overpasses (21 days) of Aquarius.
In theory, the VOD dataset is proportional to vegetation water content. Nevertheless, it may not equally reflect vegetation water content in all canopy layers due
to attenuation across the canopy. The algorithm of chapter 5 should be applied to
radiometric observations at higher frequencies to generate the data necessary to study
the effect of frequency on VOD measurements. Data analysis should be supplemented
by theoretical studies of expected extinction in multi-level canopies (as in Ferrazzoli
et al. (1995), but for a wider variety of canopy types).
Plant water stress varies
across the canopy, so lower frequency observations that integrate across the canopy
may be more representative than higher frequencies.
They are also less sensitive
to canopy heterogeneity (Matzler, 1994). Higher frequencies, however, may be less
sensitive to litter or stem water content, which may be difficult to disentangle from
drought-response reductions in vegetation water content, as in Chapter 5. Additional
studies are needed to help elucidate which frequency ranges are preferred for studies
of vegetation water content behavior. Note that the algorithm developed in Chapter
5 can easily be applied to observations made at higher frequencies. A dataset of VOD
observations at higher frequencies is already available (Owe et al., 2008; Liu et al.,
2011), but it uses the LPRM retrieval algorithm, which is sensitive to errors in the
assumed effective single-scattering albedo and to observational noise.
As shown in Chapter 6, there are significant differences in the behavior of L-band
active and passive vegetation indices. If VOD is more sensitive to litter than aHV, an
active-based vegetation index may be more suitable for studies of vegetation water
content, while VOD can possibly provide complementary information. However, the
use of active vegetation indices for studies of vegetation water content is limited by
the difficulty of interpreting gHV, whose relationship to vegetation water content may
be non-linear. Relatively simple models such as the cloud model (Attema and Ulaby,
1978) show the most promise in enabling the retrieval of vegetation water content
from active measurements. This can be combined with recently developed parsimo165
-
-- 1--__'-' --
.1 1 1
nious models to estimate the soil scattering contribution to measured backscattering
coefficients (Narvekar et al., 2015; Bruscantini et al., 2015) to derive an effective VOD
from UHV.
Additional work is needed to validate whether the possible explanations in Chapter
6 explains the out of phase behavior of VOD and UHV in certain dry tropical regions.
Ground-based observations in the locations of Figure 6-4 are necessary to determine
the exact seasonal cycle of bud break, leaf flushing, and leaf fall in these regions.
In validating satellite observations with ground-based observations, there is always
a risk that the locations of the ground-based observations are not representative of
the scale of the satellite pixel. The future availability of a full annual cycle of VOD
data from higher-resolution SMAP records ( 36 km instead of 80 km) should help
with this issue. Furthermore, the spatial homogeneity of the VOD seasonal behavior
patterns in these regions suggests that representativeness error will be relatively low
and thus unlikely to be a major concern. Additionally, radiative transfer simulations
should be run to determine how much different canopy components contribute to the
total. VOD and
UHV
in these regions. This is likely to depend on land cover type
and vegetation characteristics, so it is imperative that region-specific parameters are
used in these simulations. Remote sensing datasets such as lidar-based canopy height
can be used to help this parameterization, and may be supplemented by groundbased observations where available. Lastly, a comparison of the seasonal behavior of
VOD at L-band and at higher frequencies should help to validate these results, as
the sensitivity of passive emissivity to leaves is highly dependent on the frequency
used (Ferrazzoli and Guerriero, 1996).
In Chapter 7, the diurnal variability of
cTHV,
interpreted as related to vegetation
water content, was used to study the speed of vegetation water content refilling.
Variations in the size of the difference in oHV between morning and afternoon were
interpreted as sensitive to variations in refilling speed, but may also be sensitive
to variations in refilling amount. Additional studies should take this into account.
Rather than assuming the amount of necessary diurnal refilling is constant in time and
changes in the diurnal variability are only reflective of changes in refilling speed, the
166
amount of expected refilling should be calculated explicitly based on transpiration
estimates.
Although modeled transpiration estimates may be imperfect, they are
likely to capture the approximate seasonal cycle of refilling amount, providing a firstorder correction for this effect. Additional insights into this question may be gained
from tower-based studies that can make continuous microwave measurements over
the course of the diurnal cycle.
The strong diurnal cycle of vegetation water content is superimposed upon slower
seasonal variability. An easy first step to explore this seasonal variability is to focus
on regions with a distinct dry season. In many of these regions, VOD dries down
after the end of the rainy season. The size and timing of the VOD dry-down depends
on plant water strategies. Their spatial variability can be studied and compared to a
range of other rainfall (mean annual amount, intensity and duration of seasonality),
energy (net radiation, cloud cover), and known plant properties (canopy height, plant
functional type, woody fraction, etc) to find dominant controls. These can be used to
test theoretical predictions that suggest that the seasonality in VOD may be highly
sensitive to the duration of the wet season (Feng et al., 2012). Previous investigations
have shown there is as much variability in photosynthetic parameters within different
vegetation covers of the same plant functional type as there is between plant functional
type groups themselves (Groenendijk et al., 2011). Given the strong coupling between
plant water loss through transpiration (which has a first-order effect on vegetation
water content) and photosynthetic behavior (e.g. Katul et al., 2010), similar findings
are expected for the drydown behavior of VOD.
Models of photosynthesis and transpiration that include vegetation water content
as an explicitly modeled component are becoming more common (e.g. Matheny et al.,
2014). When they are run on a larger scale, VOD data could be assimilated into
such models. Comparing the day-to-day variability of vegetation water content to
soil moisture at different times may allow the development of an indicator of canopylevel plant isohydry that can be derived across the globe, whose controls can then
be studied. A key challenge in such an effort will be the conversion of VOD to leaf
water potential. This challenge could be overcome, for example by using a machine
167
learning approach (as has been developed for snow (Forman and Reichle, 2015)) or if
need be by assuming a transfer function dependent on land cover type. The resulting
dataset can be useful for predicting drought sensitivity in different regions under
current and future conditions. VOD-based indices of drought sensitivity can also be
used to evaluate theoretical predictions that taller trees are more prone to hydraulic
failure (McDowell et al., 2008).
Remotely sensed observations can provide valuable new information about the
behavior of the global hydrologic cycle - they enable observations at scales unimaginable using in situ measurements. Because they are indirect measurements and not
all model parameters can be directly inferred from remote sensing, remotely sensed
observations are often interpreted only in the context of other remotely sensed observables or in the context of large-scale models. The gap to the literature based on
ground observations is rarely bridged unless it is in the explicit context of algorithm
validation. Whenever possible, studies should be designed so as to explicitly test theories developed at smaller scales (such as, for example, the leaf level in the context of
ecohydrology). This not only serves to enrich the interpretation of remotely sensed
observations, but may also provide valuable lessons for the development of hydrologic
models.
168
Appendix A
Vegetation Parameters for Hydrologic
Modeling
The vegetation parameters used for hydrologic modeling of the Vaira Ranch site are
detailed in Table A.1. The stomatal resistance r. model takes the form (Campbell,
1985; Flerchingerand Pierson, 1997),
rs
=
(A.1)
rso (1 + (4'i/4c)n)
Because several of these model-specific parameters were not available in the literature,
they were manually optimized to produce the best fit between modeled soil moisture
and the Ameriflux measurements. Changing the parameters did not cause a significant
change in the modeled soil moisture.
The variation of root biomass with depth was assumed to be distributed exponentially, p = 1 -
f',
where p is the cumulative fraction of roots located above depth z
in centimeters (Jackson et al., 1996). For Vaira Ranch,
#
= 0.94 (Baldocchi et al.,
2004). The model is spun-up for 32 years. The soil is assumed to be a silty loam,
consisting of 30% sand fraction and 13% clay fraction, with a saturated hydraulic
conductivity of 200 mm/day (Miller et al., 2007).
169
Table A.1: Vegetation parameters used for hydrologic modeling
Source
Value
Parameter
Ameriflux site description
10 cm
Plant height
Assumed
0.2 cm
Characteristic dimension
Baldocchi et al. (2004), avg. of fig. 1
0.33
Leaf Area Index
2
24 g/m
LAI/0.0135, Montaldo et al. (2005)
Dry biomass
Baldocchi et al. (2004), fig. 5
Canopy albedo
0.15
Temp. of respiration shutdown
50 C
Assumed
Minimum stomatal resistance ro
Critical leaf water potential I'
Stomatal resistance parameter n
70.0 s/m
-150 m
5.0
Xu and Baldocchi (2003), fig. 2
Optimized
Flerchinger and Pierson (1997)
Leaf resistance
Root resistance
106 m 3 s kg- 1
2 x 106 m 3 s kg-'
Optimized
Optimized
Surface roughness
1 cm
0.1 (plant height)
170
Bibliography
Akbar, R., and M. Moghaddam (2015), A Combined Active AA; Passive Soil Moisture
Estimation Algorithm With Adaptive Regularization in Support of SMAP, IEEE
Trans. Geosci. Remote Sens., 53(6), 3312-3324.
Alemohammad, S. H. (2015), Personal Communication.
Andela, N., Y. Y. Liu, A. I. J. M. van Dijk, R. A. M. de Jeu, and T. R. McVicar (2013),
Global changes in dryland vegetation dynamics (1988 - 2008) assessed by satellite
remote sensing: comparing a new passive microwave vegetation density record with
reflective greenness data, Biogeosciences, 10(10), 6657-6676, doi:10.5194/bg-106657-2013.
Anderegg, W. R. L., J. M. Kane, and L. D. L. Anderegg (2012), Consequences of
widespread tree mortality triggered by drought and temperature stress, Nat. Clim.
Chang., 3(September 2012), doi:10.1038/nclimatel635.
Anderegg, W. R. L., et al. (2015), Tree mortality from drought, insects, and their
interactions in a changing climate., New Phytol., doi:10.1111/nph.13477.
Arii, M., J. J. V. Zyl, Y. Kim, S. Member, and A. Current (2010), A General Characterization for Polarimetric Scattering From Vegetation Canopies, IEEE Trans.
Geosci. Remote Sens., 48(9), 3349-3357.
Asefi-Najafabady, S., and S. Saatchi (2013), Response of African humid tropical
forests to recent rainfall anomalies, Philos. Trans. R. Soc. B Biol. Sci., 368(1625),
Attema, E. P. W., and F. T. Ulaby (1978), Vegetation modeled as a water cloud,
Radio Sci., 13(2), 357-364.
Baker, I. T., L. Prihodko, a. S. Denning, M. Goulden, S. Miller, and H. R. Da Rocha
(2009), Seasonal drought stress in the amazon: Reconciling models and observations, J. Geophys. Res. Biogeosciences, 114 (1), 1-10, doi:10.1029/2007JG000644.
Baldocchi, D. D., L. Xu, and N. Kiang (2004), How plant functional-type, weather,
seasonal drought, and soil physical properties alter water and energy fluxes of an
oak-grass savanna and an annual grassland, Agr. For. Meteorol., 123(1-2), 13-39.
171
Bannister, R. N. (2008), A review of forecast error covariance statistics in atmospheric
variational data assimilation . II : Modelling the forecast error covariance statistics,
Q. J. R. Meteorol. Soc., 1996, 1971-1996, doi:10.1002/qj.
Beven, K. (1993), Prophecy, reality and uncertainty in distributed hydrological modelling, Adv. Water Resour., 16(1), 41-51.
Beven, K. J., and M. J. Kirkby (1979), A physically based, variable contributing area model of basin hydrology, Hydrol. Sci. Bull., 24 (1), 43-69, doi:
10.1080/02626667909491834.
Bindlish, R., T. Jackson, M. Cosh, T. Zhao, and P. O'Neill (2015), Global Soil Moisture From the Aquarius/SAC-D Satellite: Description and Initial Assessment, IEEE
Geosci. Remote Sens. Lett., 12(5), 923-927.
B16schl, G., and M. Sivapalan (1995), Scale issues in hydrological modelling: A review,
Hydrol. Process., 9(3-4), 251-290.
Bohrer, G., H. Mourad, T. A. Laursen, D. Drewry, R. Avissar, D. Poggi, R. Oren, and
G. G. Katul (2005), Finite element tree crown hydrodynamics model (FETCH) using porous media flow within branching elements: A new representation of tree hydrodynamics, Water Resour. Res., 41 (11), n/a--n/a, doi:10.1029/2005WR004181.
Boisvert, J. B., Q. H. J. Gwyn, A. Chanzy, D. J. Major, B. Brisco, and R. J.
Brown (1997), Effect of surface soil moisture gradients on modelling radar
backscattering from bare fields, Int. J. Remote Sens., 18(1), 153-170, doi:
10.1080/014311697219330.
Bourne, A. E., A. M. Haigh, and D. S. Ellsworth (2015), Stomatal sensitivity to
vapour pressure deficit relates to climate of origin in Eucalyptus species, Tree Physiol., 35(3), 266-278, doi:10.1093/treephys/tpvOl4.
Bras, R. L. (1989), Hydrology: An Introduction to Hydrologic Science, 660 pp.,
Addison-Wesley.
Breshears, D. D., 0. B. Myers, C. W. Meyer, F. J. Barnes, C. B. Zou, C. D. Allen,
N. G. McDowell, and W. T. Pockman (2009), Research communications research
communications Tree die-off in response to global change-type drought: Mortality
insights from a decade of plant water potential measurements, Front. Ecol. Environ., 7(4), 185-189, doi:10.1890/080016.
Brodribb, T. J., and N. M. Holbrook (2004), Diurnal depression of leaf hydraulic
conductance in a tropical tree species, Plant, Cell Environ., 27(7), 820-827, doi:
10.1111/j.1365-3040.2004.01188.x.
Bruscantini, C. A., A. G. Konings, P. Narvekar, K. A. McColl, and D. Entekhabi
(2015), L-band radar soil moisture retrieval without ancillary information, IEEE
Trans. Geosci. Remote Sens., Submitted.
172
Burgin, M. (2012), Personal Communication.
.
Burgin, M., D. Clewley, R. M. Lucas, and M. Moghaddam (2012), A generalized radar backscattering model based on wave theory for multilayer multispecies vegetation, IEEE Trans. Geosci. Remote Sens., 49(12), 4832-4845, doi:
10.1109/TGRS.2011.2172949.
Campbell, G. S. (1985), Soil physics with BASIC: Transport models for soil-plant
systems, 150 pp., Elsevier, Amsterdam.
Cariou, C., K. Chehdi, and S. Le Moan (2011), BandClust: An Unsupervised Band
Reduction Method for Hyperspectral Remote Sensing, IEEE Geosci. Remote Sens.
Lett., 8(3), 565-569.
Cavender-Bares, J., L. Sack, and J. Savage (2007), Atmospheric and soil drought
reduce nocturnal conductance in live oaks., Tree Physiol., 27(4), 611-620, doi:
10. 1093/treephys/27.4.611.
Cawse-Nicholson, K., S. B. Damelin, A. Robin, and M. Sears (2013), Determining
the Intrinsic Dimension of a Hyperspectral Image Using Random Matrix Theory,
IEEE Trans. Image Proc., 22(4), 1301-1310.
Cerra, D., and M. Datcu (2008), A Model Conditioned Data Compression Based
Similarity Measure, in Data Compression Conf. 2008. DCC 2008, p. 509.
Chapin, E., A. Chau, J. Chen, B. Heavey, S. Hensley, Y. Lou, R. Machuzak, and
M. Moghaddam (2012), AirMOSS: An Airborne P-band SAR to measure root-zone
soil moisture, in Radar Conf. (RADAR), 2012 IEEE, pp. 693-698.
Churkina, G., S. W. Running, and A. L. Schloss (1999), Comparing global models of
terrestrial net primary productivity (NPP): the importance of water availability,
Glob. Chang. Biol., 5(S1), 46-55, doi:10.1046/j.1365-2486.1999.00006.x.
Ciais, P., et al. (2013), Climate Change 2013. The Physical Science Basis. Contribution of Working Group 1 to the Fifth Assessment Report of the Intergovernmental
Panel on Climate Change, chap. Carbon and, pp. 465-570, Cambridge University
Press, New York.
Cover, T. M., and J. A. Thomas (1991), Elements of Information Theory, John Wiley
& Sons, Ltd.
Crow, W. T., et al. (2005), An observing system simulation experiment for Hydros
radiometer-only soil moisture products, IEEE Trans. Geosci. Remote Sens., 43(6),
1289-1303, doi:10.1109/TGRS.2005.845645.
Crow, W. T., A. A. Berg, M. H. Cosh, A. Loew, B. P. Mohanty, R. Panciera, P. de Rosnay, D. Ryu, and J. P. Walker (2012), Upscaling sparse ground-based soil moisture
observations for the validation of coarse-resolution satellite soil moisture products,
Rev. Geophys., 50(2), RG2002--.
173
Cuenca, R., and Y. Hagimoto (2012), Personal Communication.
Cui, Q., J. Shi, J. Du, T. Zhao, and C. Xiong (2015), An Approach for Monitoring
Global Vegetation Based on Multiangular Observations From SMOS, IEEE J. Sel.
Top. Appl. Earth Obs. Remote Sens., 8(2), 604-616.
Davenport, I., J. Fernandez-Galvez, and R. Gurney (2005), A sensitivity analysis of
soil moisture retrieval from the tau-omega microwave emission model, IEEE Trans.
Geosci. Remote Sens., 43(6), 1304-1316, doi:10.1109/TGRS.2005.845640.
de Jeu, R. a. M., T. R. H. Holmes, R. M. Parinussa, and M. Owe (2014), A spatially coherent global soil moisture product with improved temporal resolution, J.
Hydrol., 516, 284-296, doi:10.1016/j.jhydrol.2014.02.015.
De Roo, R., M. C. Dobson, and F. T. Ulaby (1991), Dielectric Constant of Forest
Specular Reflectivity of Forest Litter Bistatic Scattering from Forest Litter, Proc.
IEEE Geosci. Remote Sens. Symp., pp. 15-18.
Dinnat, E. P., S. Abraham, D. M. Le Vine, P. De Matthaeis, and C. Utku
(2012), Comparison of aquarius measurements over oceans with radiative transfer models at L-band, Int. Geosci. Remote Sens. Symp., pp. 382-385, doi:
10.1 109/IGARSS.2012.6351558.
Draper, C. S., R. H. Reichle, G. J. M. De Lannoy, and Q. Liu (2012), Assimilation
of passive and active microwave soil moisture retrievals, Geophys. Res. Lett., 39, 5
PP., doi:201210.1029/2011GL050655.
Du, Y., F. T. Ulaby, and M. C. Dobson (2000), Sensitivity to soil moisture by active
and passive microwave sensors, IEEE Trans. Geosci. Remote Sens., 38(1), 105-114,
doi: 10.1109/36.823905.
Duan, X., and M. Moghaddam (2011), Vector electromagnetic scattering from layered
rough surfaces with buried discrete random media for subsurface and root-zone soil
moisture sensing, in Geosci. Remote Sens. Symp. (IGARSS), 2011 IEEE Int., pp.
1227-1230.
Durden, S. L., J. J. van Zyl, and H. A. Zebker (1989), Modeling and observation
of the radar polarization signature of forested areas, IEEE Trans. Geosci. Remote
Sens., 27(3), 290-301, doi:10.1109/36.17670.
Eamus, D. (1999), Ecophysiological traits of deciduous and evergreen woody species
in the seasonally dry tropics, Trends Ecol. Evol., 14 (1), 11-16, doi:10.1016/S01695347(98)01532-8.
Ehrenberger, W., S. Riiger, R. Fitzke, P. Vollenweider, M. Giinthardt-Goerg,
T. Kuster, U. Zimmermann, and M. Arend (2012), Concomitant dendrometer and
leaf patch pressure probe measurements reveal the effect of microclimate and soil
moisture on diurnal stem water and leaf turgor variations in young oak trees, Funct.
Plant Biol., 39(4), 297-305.
174
England, A. W. (1975), Thermal Microwave Emission from a Scattering Layer, J.
Geophys. Res., 80(32), 4484-4496, doi:10.1029/JB080i032p04484.
Englhart, S., V. Keuck, and F. Siegert (2011), Aboveground biomass retrieval in
tropical forests - The potential of combined X- and L-band SAR data use, Remote
Sens. Environ., 115(5), 1260-1271, doi:10.1016/j.rse.2011.01.008.
Entekhabi, D., R. H. Reichle, R. D. Koster, and W. T. Crow (2010a), Performance
Metrics for Soil Moisture Retrievals and Application Requirements, J. Hydrometeorol., 11 (3), 832-840, doi:10.1175/2010JHM1223.1.
Entekhabi, D., et al. (2010b), The soil moisture active passive (SMAP) mission, Proc.
IEEE, 98(5), 704-716, doi:10.1109/JPROC.2010.2043918.
Erten, E., A. Reigber, L. Ferro-Famil, and 0. Hellwich (2012), A New Coherent Similarity Measure for Temporal Multichannel Scene Characterization, IEEE Trans.
Geosci. Remote Sens., 50(7), 2839-2851.
Escorihuela, M. J., A. Chanzy, J. P. Wigneron, and Y. H. Kerr (2010), Effective
soil moisture sampling depth of L-band radiometry: A case study, Remote Sens.
Environ., 114 (5), 995-1001, doi:10.1016/j.rse.2009.12.011.
Ewers, B. E., R. Oren, N. Phillips, M. Str6mgren, and S. Linder (2001), Mean canopy
stomatal conductance responses to water and nutrient availabilities in Picea abies
and Pinus taeda., Tree Physiol., 21 (12-13), 841-850, doi:10.1093/treephys/21.1213.841.
Ewers, B. E., R. Oren, H. S. Kim, G. Bohrer, and C. T. Lai (2007), Effects of hydraulic
architecture and spatial variation in light on mean stomatal conductance of tree
branches and crowns, Plant, Cell Environ., 30(4), 483-496, doi:10.1111/j.13653040.2007.01636.x.
Eyre, J. R. (1989), Inversion of cloudy satellite sounding radiances by nonlinear
optimal estimation. I: Theory and simulation for TOVS, Q.J.R. Meteorol. Soc.,
115(489), 1001-1026.
Famiglietti, J. S., D. Ryu, A. A. Berg, M. Rodell, and T. J. Jackson (2008), Field
observations of soil moisture variability across scales, Water Resour. Res., 44(1),
1-16, doi:10.1029/2006WR005804.
Feng, X., G. Vico, and A. Porporato (2012), On the effects of seasonality on
soil water balance and plant growth, Water Resour. Res., 48(5), 1-12, doi:
10.1029/2011WR011263.
Ferrazzoli, P., and L. Guerriero (1996), Passive microwave remote sensing of
forests: a model investigation, IEEE Trans. Geosci. Remote Sens., 34(2), doi:
10.1109/36.485121.
175
Ferrazzoli, P., L. Guerriero, S. Paloscia, and P. Pampaloni (1995), Modeling X and Ka
band emission from Leafy vegetation, J. Electromagn. Waves Appl., 9(3), 393-406,
doi: 10.1 163/156939395X00541.
Fiener, P., K. Auerswald, and K. Van Oost (2011), Spatio-temporal patterns in land
use and management affecting surface runoff response of agricultural catchments-A
review, Earth-Science Rev., 106(1-2), 92-104, doi:10.1016/j.earscirev.2011.01.004.
Fisher, J. B., D. D. Baldocchi, L. Misson, T. E. Dawson, and A. H. Goldstein (2007),
What the towers don't see at night: nocturnal sap flow in trees and shrubs at two
AmeriFlux sites in California, Tree Physiol., 27(4), 597-610.
Flerchinger, G. N., and F. B. Pierson (1991), Modeling plant canopy effects on variability of soil temperature and water, Agr. For. Meteorol., 56, 227-246.
Flerchinger, G. N., and F. B. Pierson (1997), Modelling plant canopy effects on variability of soil temperature and water: Model calibration and validation, J. Arid
Environ., 35(4), 641-653, doi:10.1006/jare.1995.0167.
Forman, B. A., and R. H. Reichle (2015), Using a support vector machine and a land
surface model to estimate large-scale passive microwave temperatures over snowcovered land in North America, IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens.,
pp. 1-24, doi:10.1109/JSTARS.2014.2325780.
Freeman, A., and S. S. Saatchi (2004), On the Detection of Faraday Rotation in
Linearly Polarized L-band SAR Backscatter Signatures, East, 42(8), 1607-1616.
Friesen, J., S. C. Steele-Dunne, and N. Van De Giesen (2012), Diurnal differences in
global ers scatterometer backscatter observations of the land surface, IEEE Trans.
Geosci. Remote Sens., 50(7 PART1), 2595-2602, doi:10.1109/TGRS.2012.2193889.
Fung, A. K., M. S. Dawson, K. S. Chen, A. Y. Hsu, E. T. Engman, P. 0. O'Neill,
and J. Wang (1996), A modified IEM model for scattering from soil surfaces with
application to soil moisture sensing, in Geosci. Remote Sens. Symp. 1996. IGARSS
'96. 'Remote Sens. a Sustain. Futur. Int., vol. 2, pp. 1297-1299 vol.2.
Galantowicz, J. F., D. Entekhabi, and E. G. Njoku (1999), Tests of sequential data
assimilation for retrieving profile soil moisture and temperature from observed L-
band radiobrightness, IEEE Trans. Geosci. Remote Sens., 37(4), 1860-1870, doi:
10.1109/36.774699.
Gillespie, T., B. Brisco, R. Brown, and G. Sofko (1990), Radar detection of a
dew event in wheat, Remote Sens. Environ., 33(3), 151-156, doi:10.1016/0034-
4257(90)90026-I.
Good, S. P., D. Noone, and G. Bowen (2015), Hydrologic Connectivity Constrains
Partitioning of Global Terrestrial Water Fluxes, Science (80-. )., 349(6244), 175-
177.
176
Goulden, M. L., J. W. Munger, S.-M. Fan, B. C. Daube, and S. C. Wofsy (1996),
Measurements of carbon sequestration by long-term eddy covariance: Methods and
a critical evaluation of accuracy, Glob. Chang. Biol. [Global Chang. Biol.], 2(3),
169-182, doi:10.1111/j.1365-2486.1996.tb00070.x.
Grant, J. P., A. A. van de Griend, M. Schwank, and J.-P. Wigneron (2009), Observations and Modeling of a Pine Forest Floor at L-Band, IEEE Trans. Geosci. Remote
Sens., 47(7), 2024-2034, doi:10.1109/TGRS.2008.2010252.
Groenendijk, M., et al. (2011), As sessing parameter variability in a photosynthesis model within and betw een plant functional types using global
Fluxnet eddy covariance data, Ag ric. For. Meteorol., 151(1), 22-38, doi:
10. 1016/j.agrformet.2010.08.013.
Guan, K., A. Wolf, D. Medvigy, K. K. Caylor, M. Pan, and E. F. Wood (2013),
Seasonal coupling of canopy structure and function in African tropical forests and
its environmental controls, Ecosphere, 4 (3), art35, doi:10.1890/ES12-00232.1.
Guan, K., E. F. Wood, D. Medvigy, J. Kimball, M. Pan, K. K. Caylor, J. Sheffield,
X. Xu, and M. 0. Jones (2014), Terrestrial hydrological controls on land surface
phenology of African savannas and woodlands, J. Geophys. Res. Biogeosciences,
119, 1652-1669, doi:10.1002/2013JG002572.Received.
Guanter, L., C. Frankenberg, A. Dudhia, P. E. Lewis, J. G6mez-Dans, A. Kuze,
H. Suto, and R. G. Grainger (2012), Retrieval and global assessment of terrestrial
chlorophyll fluorescence from GOSAT space measurements, Remote Sens. Environ.,
121(0), 236-251, doi:http://dx.doi.org/10.1016/j.rse.2012.02.006.
Gueguen, L., S. Cui, G. Schwarz, and M. Datcu (2010), Multitemporal analysis of
multisensor data: Information theoretical approaches, in Geosci. Remote Sens.
Symp. (IGARSS), 2010 IEEE Int., pp. 2559-2562.
Hacine-Gharbi,
A., P. Ravier, R. Harba, and T. Mohamadi (2012),
Low bias histogram-based estimation of mutual information for feadoi:
33(10),
1302-1308,
Pattern Recognit. Lett.,
ture selection,
http://dx.doi.org/10.1016/j .patree.2012.02.022.
Hasanlou, M., and F. Samadzadegan (2012), Comparative Study of Intrinsic Dimensionality Estimation and Dimension Reduction Techniques on Hyperspectral Images Using {K-NN} Classifier, IEEE Geosci. Remote Sens. Lett., 9(6), 1046-1050.
Hellkvist, J., R. G.P., and J. P.G. (1974), Vertical Gradients of Water Potential and
Tissue Water Relations in Sitka Spruce Trees Measured with the Pressure Chamber,
J. Appl. Ecol., 11(2), 637.
Hensley, S., et al. (2008), The UAVSAR instrument: Description and first results, in
Radar Conf. 2008. RADAR '08. IEEE, pp. 1-6.
177
Herrera, A., C. Ballestrini, and W. Tezara (2008), Nocturnal sap flow in the C3-CAM
species, Clusia minor, Trees - Struct. Funct., 22(4), 491-497, doi:10.1007/s00468008-0209-8.
Heylen, R., and P. Scheunders (2013), Hyperspectral Intrinsic Dimensionality Estimation With Nearest-Neighbor Distance Ratios, IEEE J. Sel. Top. Appl. Earth
Obs. Remote Sens., 6(2), 570-579.
Hoeben, R., and P. A. Troch (2000), Assimilation of active microwave observation
data for soil moisture profile estimation, Water Resour. Res., 36(10), 2805-2819.
Holbrook, N. M., J. L. Whitbeck, and H. A. Mooney (1995), Drought responses
of neotropical dry forest trees, in Seas. dry Trop. For., pp. 243-276, Cambridge
University Press.
Hossain, M. A., X. Jia, and M. Pickering (2014), Subspace Detection Using a Mutual
Information Measure for Hyperspectral Image Classification, IEEE Geosci. Remote
Sens. Lett., 11 (2), 424-428.
Huete, A., C. Justice, and H. Liu (1994), Development of Vegetation and Soil Indices
for MODIS-EOS, Remote Sens. Environ., 49, 224-234.
Hutyra, L. R., J. W. Munger, S. R. Saleska, E. Gottlieb, B. C. Daube, A. L. Dunn,
D. F. Amaral, P. B. de Camargo, and S. C. Wofsy (2007), Seasonal controls on
the exchange of carbon and water in an Amazonian rain forest, J. Geophys. Res.
Biogeosciences, 112(3), 1-16, doi:10.1029/2006JG000365.
Imperatore, P., A. Iodice, and D. Riccio (2009), Electromagnetic Wave Scattering
From Layered Structures With an Arbitrary Number of Rough Interfaces, IEEE
Trans. Geosci. Remote Sens., 47(4), 1056-1072.
Jackson, R. B., J. Canadell, J. R. Ehleringer, H. A. Mooney, 0. E. Sala, and E. D.
Schulze (1996), A global analysis of root distributions for terrestrial biomes, Oecologia, 108(3), 389-411, doi:10.1007/BF00333714.
Jackson, T. J., and T. J. Schmugge (1991), Vegetation effects on the microwave
emission of soils, Remote Sens. Environ., 36(3), 203-212.
Jackson, T. J., A. Y. Hsu, and P. E. O'Neill (2002), Surface Soil Moisture Retrieval and Mapping Using High-Frequency Microwave Satellite Observations in
the {Southern Great Plains}, J. Hydrometeor, 3(6), 688-699, doi:10.1175/15257541(2002)003<0688:SSMRA M>2.0.CO;2.
Jagdhuber, T., I. Hajnsek, A. Bronstert, and K. P. Papathanassiou (2013), Soil Moisture Estimation Under Low Vegetation Cover Using a Multi-Angular Polarimetric
Decomposition, Geosci. Remote Sensing, IEEE Trans., 51 (4), 2201-2215.
178
James, A. L., and N. T. Roulet (2007), Investigating hydrologic connectivity and
its association with threshold change in runoff response in a temperate forested
watershed, Hydrol. Process., 21(25), 3391-3408.
Janott, M., S. Gayler, A. Gessler, M. Javaux, C. Klier, and E. Priesack (2011), A onedimensional model of water flow in soil-plant systems based on plant architecture,
Plant Soil, 341 (1-2), 233-256, doi:10.1007/s11104-010-0639-0.
Jasechko, S., Z. D. Sharp, J. J. Gibson, S. J. Birks, Y. Yi, and P. J. Fawcett (2013),
Terrestrial water fluxes dominated by transpiration, Nature, 496(7445), 347-350.
Jones, M. 0., L. A. Jones, J. S. Kimball, and K. C. McDonald (2011),
Satellite passive microwave remote sensing for monitoring global land
doi:
1102-1114,
Remote Sens. Environ., 115(4),
surface phenology,
http://dx.doi.org/10.1016/j.rse.2010.12.015.
Kattge, J., et al. (2011), TRY - a global database of plant traits, Glob. Chang. Biol.,
17(9), 2905-2935, doi:10.1111/j.1365-2486.2011.02451.x.
Katul, G., A. Porporato, and R. -Oren (2007), Stochastic Dynamics of PlantWater Interactions, Annu. Rev. Ecol. Evol. Syst., 38(1), 767-791, doi:
10.1 146/annurev.ecolsys.38.091206.095748.
Katul, G., S. Manzoni, S. Palmroth, and R. Oren (2010), A stomatal optimization
theory to describe the effects of atmospheric C02 on leaf photosynthesis and transpiration, Ann. Bot., 105(3), 431-442.
Kelly, A. E., and M. L. Goulden (2008), Rapid shifts in plant distribution with
recent climate change., Proc. Natl. Acad. Sci. U. S. A., 105(33), 11,823-11,826,
doi:10.1073/pnas.0802891105.
Kerr, Y., P. P. Waldteufel, P. Richaume, L. Davenport, P. Ferrazzoli, and J.P. Wigneron (2011), Algorithm Theoretical Based Document (ATBD) for the
SMOS level 2 Processor for Soil Moisture, Tech. rep., CESBIO, IPSL-Service
difYiAifironomie, INRA-EPHYSE, Reading University, Tor Vergata University.
Kerr, Y. H., et al. (2010), The SMOS Mission: New Tool for Monitoring
Key Elements ofthe Global Water Cycle, Proc. IEEE, 98(5), 666-687, doi:
10.1109/JPROC.2010.2043032.
Kerr, Y. H., et al. (2012), The SMOS Soil Moisture Retrieval Algorithm, IEEE Trans.
Geosci. Remote Sens., 50(5), 1384-1403.
Khankhoje, U. K., J. J. van Zyl, and T. A. Cwik (2013), Computation of Radar Scattering From Heterogeneous Rough Soil Using the Finite-Element Method, Geosci.
Remote Sensing, IEEE Trans., 51(6), 3461-3469.
179
Kim, S.-B., L. Tsang, J. T. Johnson, S. Huang, J. J. Van Zyl, and E. G. Njoku (2012),
Soil Moisture Retrieval Using Time-Series Radar Observations Over Bare Surfaces,
Geosci. Remote Sensing, IEEE Trans., 50(5), 1853-1863.
Kinnell, P. I. A. (2010), Event soil loss, runoff and the Universal Soil Loss
Equation family of models: A review, J. Hydrol., 385(1-4), 384-397, doi:
10.1016/j.jhydrol.2010.01.024.
Kleidon,
A. (2004), Global Datasets of Rooting Zone Depth Inferred
from Inverse Methods, J. Clim., 17(13), 2714-2722, doi:10.1175/15200442(2004)017<2714:GDORZD>2.0.CO;2.
Klein, L., and C. Swift (1977), An improved model for the dielectric constant of sea
water at microwave frequencies, IEEE Trans. Antennas Propag., 25(1), 104-111.
Klein, T. (2014), The variability of stomatal sensitivity to leaf water potential across
tree species indicates a continuum between isohydric and anisohydric behaviours,
Funct. Ecol., pp. 1313-1320, doi:10.1111/1365-2435.12289.
Kong, J. A. (2008), Electromagnetic Wave Theory, 1016 pp., EMW Publishing, Cambridge, MA.
Konings, A. G., G. G. Katul, and A. Porporato (2010), The rainfall-no rainfall transition in a coupled land-convective atmosphere system, Geophys. Res. Lett., 37(14),
1-5, doi:10.1029/2010GL043967.
Konings, A. G., D. Entekhabi, S. K. Chan, and E. G. Njoku (2011), Effect of Radiative
Transfer Uncertainty on L-Band Radiometric Soil Moisture Retrieval, IEEE Trans.
Geosci. Remote Sens., 49(7), 2686-2698.
Konings, A. G., D. Entekhabi, M. Moghaddam, and S. S. Saatchi (2014), The Effect
of a Variable Soil Moisture Profile on P-band Backscatter Estimation, IEEE Trans.
Geosci. Remote Sens., 52(10), 6315-6325.
Konings, A. G., K. A. McColl, M. Piles, and D. Entekhabi (2015), How Many Parameters Can Be Maximally Estimated From a Set of Measurements?, IEEE Geosci.
Remote Sens. Lett., 12(5), 1081-1085.
Koster, R. D. (2004), Regions of Strong Coupling Between Soil Moisture and Precipitation, Science (80-. )., 305(5687), 1138-1140, doi:10.1126/science.1100217.
Koster, R. D., M. J. Suarez, and M. Heiser (2000), Variance and Predictability of
Precipitation at Seasonal-to-Interannual Timescales, J. Hydrometeorol., 1 (1), 2646, doi:10.1175/1525-7541(2000)001<0026:VAPOPA>2.0.CO;2.
Koster, R. D., Z. Guo, R. Yang, P. A. Dirmeyer, K. Mitchell, and M. J. Puma (2009),
On the Nature of Soil Moisture in Land Surface Models, J. Clim., 22(16), 43224335, doi:10.1175/2009JCLI2832.1.
180
Kseneman, M., and D. Gleich (2013), Soil-moisture estimation from X-band data
using tikhonov regularization and neural net, IEEE Trans. Geosci. Remote Sens.,
51 (7), 3885-3898, doi:10.1109/TGRS.2012.2228486.
Kumagai, T. (2010), Impact of stem water storage on diurnal estimates of whole-tree
transpiration and canopy conductance from sap flow measurements in Japanese
cedar and Japanese cypress trees, Hydrol. Process., 2274 (November 2008), 22672274, doi:10.1002/hyp.
Kumar, S. V., R. H. Reichle, R. D. Koster, W. T. Crow, and C. D. Peters-Lidard
(2009), Role of Subsurface Physics in the Assimilation of Surface Soil Moisture
Observations, J. Hydrometeor., 10(6), 1534-1547, doi:10.1175/2009JHM1134.1.
Kurum, M. (2013), Quantifying scattering albedo in microwave emission of vegetated
terrain, Remote Sens. Environ., 129(0), 66-74.
Kurum, M., P. E. O'Neill, R. H. Lang, A. T. Joseph, M. H. Cosh, and T. J. Jackson
(2012a), Effective tree scattering and opacity at L-band, Remote Sens. Environ.,
118(0), 1-9.
Kurum, M., P. E. O'Neill, R. H. Lang, M. H. Cosh, A. T. Joseph, and T. J. Jackson
(2012b), Impact of conifer forest litter on microwave emission at L-band, IEEE
Trans. Geosci. Remote Sens., 50(4), 1071-1084, doi:10.1109/TGRS.2011.2166272.
Lawrence, H., et al. (2014), Comparison between SMOS Vegetation Optical Depth
products and MODIS vegetation indices over crop zones of the USA, Remote Sens.
Environ., 140 (0), 396-406, doi:http://dx.doi.org/10.1016/j.rse.2013.07.021.
Le Hegarat-Mascle, S., D. Vidal-Madjar, 0. Taconet, and Z. M. (1997), Application
of shannon information theory to a comparison between L- and C-band SIR-C
polarimetric data versus incidence angle, Remote Sens. Environ., 60(2), 121-130,
doi:http://dx.doi.org/10.1016/S0034-4257(96)00164-2.
Le Morvan, A., M. Zribi, N. Baghdadi, and A. Chanzy (2008), Soil Moisture Profile Effect on Radar Signal Measurement, Sensors, 8(1), 256-270, doi:10.3390/s8010256.
Le Toan, T., A. Beaudoin, J. Riom, and D. Guyon (1992), Relating forest
biomass to SAR data, IEEE Trans. Geosci. Remote Sens., 30(2), 403-411, doi:
10.1109/36.134089.
Le Vine, D. M., G. S. E. Lagerloef, F. R. Colomb, S. H. Yueh, and F. A.
Pellerano (2007), Aquarius: An Instrument to Monitor Sea Surface Salinity From Space, IEEE Trans. Geosci. Remote Sens., 45(7), 2040-2050, doi:
10.1109/TGRS.2007.898092.
Le Vine, D. M., P. De Matthaeis, C. S. Ruf, and D. D. Chen (2014), Aquarius
RFI detection and mitigation algorithm: Assessment and examples, IEEE Trans.
Geosci. Remote Sens., 52(8), 4574-4584, doi:10.1109/TGRS.2013.2282595.
181
Lee, J. S., and E. Pottier (2009), Polarimetric Radar Imaging: From Basics To
Applications, CRC Press.
Legg, P. A., P. L. Rosin, D. Marshall, and J. E. Morgan (2007), Improving accuracy
and efficiency of registration by mutual information using SturgesaA2 histogram
rule, Proc. Med. Image Underst. Anal. Univ. Aberystwyth, pp. 17-18.
Licciardi, G., P. R. Marpu, J. Chanussot, and J. A. Benediktsson (2012), Linear
Versus Nonlinear PCA for the Classification of Hyperspectral Data Based on the
Extended Morphological Profiles, IEEE Geosci. Remote Sens. Lett., 9(3), 447-451.
Liu, Y. Y., R. A. M. de Jeu, M. F. McCabe, J. P. Evans, and A. 1. J. M. van Dijk
(2011), Global long-term passive microwave satellite-based retrievals of vegetation
optical depth, Geophys. Res. Lett., 38(18), L18,402--.
Liu, Y. Y., A. I. J. M. van Dijk, R. a. M. de Jeu, J. G. Canadell, M. F. McCabe, J. P.
Evans, and G. Wang (2015), Recent reversal in loss of global terrestrial biomass,
Nat. Clim. Chang., (May), doi:10.1038/nclimate2581.
Loarie, S. R., P. B. Duffy, H. Hamilton, G. P. Asner, C. B. Field, and D. D. Ackerly (2009), The velocity of climate change., Nature, 462(7276), 1052-1055, doi:
10.1038/nature08649.
Loew, A., R. Ludwig, and W. Mauser (2006), Derivation of surface soil moisture
from ENVISAT ASAR wide swath and image mode data in agricultural areas,
IEEE Trans. Geosci. Remote Sens., 44 (4), 889-899.
Manzoni, S., G. Vico, G. Katul, P. A. Fay, W. Polley, S. Palmroth, and A. Porporato
(2011), Optimizing stomatal conductance for maximum carbon gain under water
stress: a meta-analysis across plant functional types and climates, Funct. Ecol.,
25(3), 456-467.
Martinez-Vilalta, J., R. Poyatos, D. Aguad, J. Retana, and M. Mencuccini (2014), A
new look at water transport regulation in plants, New Phytol., 204, 105-115.
Matheny, A. M., et al. (2014), Characterizing the diurnal patterns of errors in the prediction of evapotranspiration by several land-surface models: An NACP analysis,
J. Geophys. Res. Biogeosciences, pp. n/a-n/a, doi:10.1002/2014JG002623.
Matzler, C. (1994), Microwave transmissivity of a forest canopy: Experiments
made with a beech, Remote Sens. Environ., 48(2), 172-180, doi:10.1016/00344257(94)90139-2.
McColl, K. A., D. Entekhabi, and M. Piles (2014), Uncertainty Analysis of Soil
Moisture and Vegetation Indices Using Aquarius Scatterometer Observations, IEEE
Trans. Geosci. Remote Sens., 52(7), 4259-4272.
182
4"'"Amw_
.
-1 "1.-1, . "I " a
_a
-
-
-
McDowell, N., et al. (2008), Mechanisms of plant survival and mortality during
drought: why do some plants survive while others succumb to drought?, New Phytol., 178(4), 719-739, doi:10.1111/j.1469-8137.2008.02436.x.
McDowell, N. G., D. J. Beerling, D. D. Breshears, R. a. Fisher, K. F.
Raffa, and M. Stitt (2011), The interdependence of mechanisms underlying
climate-driven vegetation mortality, Trends Ecol. Evol., 26(10), 523-532, doi:
10. 1016/j.tree.2011.06.003.
Medlyn, B. E., et al. (2011), Reconciling the optimal and empirical approaches to
modelling stomatal conductance, Glob. Chang. Biol., 17(6), 2134-2144.
Meesters, A., R. A. M. de Jeu, and M. Owe (2005), Analytical derivation of the
vegetation optical depth from the microwave polarization difference index, IEEE
Geosci. Remote Sens. Lett., 2(2), 121-123.
Meir, P., M. Mencuccini, and R. C. Dewar (2015), Drought-related tree mortality
addressing the gaps in understanding and prediction, New Phytol., 207, 28-33.
Miller, G. R., D. D. Baldocchi, B. E. Law, and T. Meyers (2007), An analysis of soil moisture dynamics using multi-year data from a network of micrometeorological observation sites, Adv. Water Resour., 30(5), 1065-1081, doi:
10.1016/j.advwatres.2006.10.002.
Mironov, V. L., M. C. Dobson, V. H. Kaupp, S. a. Komarov, and V. N. Kleshchenko
(2004), Generalized refractive mixing dielectric model for moist soils, IEEE Trans.
Geosci. Remote Sens., 42(4), 773-785, doi:10.1109/TGRS.2003.823288.
Mitchard, E. T. A., et al. (2009), Using satellite radar backscatter to predict aboveground woody biomass: A consistent relationship across four different African landscapes, Geophys. Res. Lett., 36(23), 1-6, doi:10.1029/2009GL040692.
Moghaddam, M., Y. Rahmat-Samii, E. Rodriguez, D. Entekhabi, J. Hoffman,
D. Moller, L. E. Pierce, S. Saatchi, and M. Thomson (2007), Microwave Observatory of Subcanopy and Subsurface (MOSS): A Mission Concept for Global Deep
Soil Moisture Observations, IEEE Trans. Geosci. Remote Sens., 45(8), 2630-2643,
doi:10.1109/TGRS.2007.898236.
Montaldo, N., R. Rondena, J. D. Albertson, and M. Mancini (2005), Parsimonious
modeling of vegetation dynamics for ecohydrologic studies of water-limited ecosystems, Water Resour. Res., 41(10), 1-16, doi:10.1029/2005WR004094.
Myneni, R., F. Hall, P. Sellers, and A. Marshak (1995), The Interpretation of Spectral
Vegetation Indexes, IEEE Trans. Geosci. Remote Sens., 33(2), 481-486.
Narvekar, P. S., D. Entekhabi, S.-b. Kim, and E. G. Njoku (2015), Soil Moisture
Retrieval Using L-Band Radar Observations, IEEE Trans. Geosci. Remote Sens.,
53(6), 3492-3506.
183
-
-
, - -
-
-
.- -
I - _11- 1.1.1
I " -,
National Research Council (Ed.) (2004), Groundwater fluxes across interfaces, The
National Academies Press.
Novick, K. a., P. C. Stoy, G. G. Katul, D. S. Ellsworth, M. B. S. Siqueira, J. Juang,
and R. Oren (2004), Carbon dioxide and water vapor exchange in a warm temperate
grassland., Oecologia, 138(2), 259-274, doi:10.1007/s00442-003-1388-z.
Oh, Y., K. Sarabandi, and F. T. Ulaby (1992), An empirical model and an inversion
technique for radar scattering from bare soil surfaces, Geosci. Remote Sensing,
IEEE Trans., 30(2), 370-381.
O'Neill, P., S. Chan, E. Njoku, T. Jackson, and R. Bindlish (2012), Algorithm Theoretical Basis Document SMAP Level 2 & 3 Soil Moisture (Passive), Tech. rep., Jet
Propulsion Laboratory, California Institute of Technology, Initial Release, v.1.
Onier, C., A. Chanzy, A. Chambarel, R. Rouveure, M. Chanet, and H. Bolvin (2011),
Impact of Soil Structure on Microwave Volume Scattering Evaluated by a TwoDimensional Numerical Model, IEEE Trans. Geosci. Remote Sens., 49(1), 415425.
Orellana, F., P. Verma, S. P. Loheide, and E. Daly (2012), Monitoring and modeling water-vegetation interactions in groundwater-dependent ecosystems, Rev. Geophys., 50(3), RG3003--.
Owe, M., R. de Jeu, and J. Walker (2001), A methodology for surface soil moisture
and vegetation optical depth retrieval using the microwave polarization difference
index, Geosci. Remote Sensing, IEEE Trans., 39(8), 1643-1654.
Owe, M., R. de Jeu, and T. Holmes (2008), Multisensor historical climatology
of satellite-derived global land surface moisture, J. Geophys. Res. Earth Surf.,
113(F1), doi:10.1029/2007JF000769.
Patton, J., and B. Hornbuckle (2013), Initial Validation of SMOS Vegetation Optical
Thickness in Iowa, IEEE Geosci. Remote Sens. Lett., 10(4), 647-651.
Peplinski, N. R., F. T. Ulaby, and M. C. Dobson (1995), Dielectric properties of soils
in the 0.3-1.3-GHz range, IEEE Trans. Geosci. Remote Sens., 33(3), 803-807.
Piepmeier, J. R., S. Member, L. Hong, F. A. Pellerano, and S. Member (2015),
Aquarius L-Band Microwave Radiometer : 3 Years of Radiometric Performance
and Systematic Effects, IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens., pp.
1-8.
Piles, M., M. Vall-llossera, A. Camps, M. Talone, and A. Monerris (2010), Analysis
of a Least-Squares Soil Moisture Retrieval Algorithm from L-band Passive Observations, Remote Sens., 2(1), 352-374, doi:10.3390/rs2010352.
184
Piles, M., K. A. McColl, D. Entekhabi, N. Das, and M. Pablos (2015), Sensitivity of
Aquarius Active and Passive Measurements Temporal Covariability to Land Surface
Characteristics, IEEE Trans. Geosci. Remote Sens., 53(8), 4700-4711.
Pinel, N., J. T. Johnson, and C. Bourlier (2011), Fully polarimetric scattering from
random rough layers under the geometric optics approximation: geoscience applications, Radio Sci., 46, RSOE20--.
Poulter, B., et al. (2014), Contribution of semi-arid ecosystems to interannual variability of the global carbon cycle., Nature, 509(7502), 600-603, doi:
10.1038/naturel3376.
Prigent, C., F. Aires, W. Rossow, and E. Matthews (2001), Joint characterization of
vegetation by satellite observations from visible to microwave wavelengths: A sensitivity analysis, J. Geophys. Res., 106(D18), 20,665, doi:10.1029/2000JD900801.
Qin, J., K. Yang, N. Lu, Y. Chen, L. Zhao, and M. Han (2013), Spatial upscaling
of in-situ soil moisture measurements based on MODIS-derived apparent thermal
inertia, Remote Sens. Environ., 138, 1-9, doi:10.1016/j.rse.2013.07.003.
Rahmoune, R., P. Ferrazzoli, Y. H. Kerr, and P. Richaume (2013), SMOS level
2 retrieval algorithm over forests: Description and generation of global maps,
IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens., 6(3), 1430-1439, doi:
10. 1109/JSTARS.2013.2256339.
Raju, S., A. Chanzy, J. Wigneron, J. Calvet, Y. Kerr, and L. Laguerre (1995), Soil
moisture and temperature profile effects on microwave emission at low frequencies,
Remote Sens. Environ., 54(2), 85-97, doi:10.1016/0034-4257(95)00133-L.
Rao, K. S., S. Raju, and J. R. Wang (1993), Estimation of soil moisture and surface roughness parameters from backscattering coefficient, Geosci. Remote Sensing,
IEEE Trans., 31(5), 1094-1099.
Refsgaard, J. C. (2000), Spatial Patterns in Catchment Hydrology, chap. Towards a,
pp. 329-354, Cambridge University Press.
Reichle, R. H., and Q. Liu (2014), Observation-Corrected Precipitation Estimates in
GEOS-5, NASA/TM2014-104606, Vol. 35.
Reichle, R. H., R. D. Koster, J. Dong, and A. A. Berg (2004), Global Soil Moisture
from Satellite Observations, Land Surface Models, and Ground Data: Implications for Data Assimilation, J. Hydrometeor., 5(3), 430-442, doi:10.1175/15257541(2004)005<0430:GSMFSO>2.0.CO;2.
Reichle, R. H., R. D. Koster, G. J. M. De Lannoy, B. A. Forman, Q. Liu, S. P. P.
Mahanama, and A.. Tour6 (2011), Assessment and Enhancement of MERRA Land
Surface Hydrology Estimates, J. Clim., 24(24), 6322-6338, doi:10.1175/JCLI-D10-05033.1.
185
Renard, N., and S. Bourennane (2009), Dimensionality Reduction Based on Tensor
Modeling for Classification Methods, IEEE Trans. Geosci. Remote Sens., 47(4),
1123-1131.
Robock, A., K. Y. Vinnikov, G. Srinivasa, J. K. Entin, S. E. Hollinger, N. A. Speranskaya, S. Liu, A. Namkhai, and G. Srinivasan (2000), The Global Soil Moisture Data Bank, Bull. Am. Meteorol. Soc., 81(6), 1281-1299, doi:10.1175/15200477(2000)081<1281:TGSMDB>2.3.CO;2.
Rodgers, C. D. (2000), Inverse Methods for Atmopsheric Sounding: Theory and Practice, 238 pp., World Scientific, Singapore.
Saatchi, S., S. Asefi-Najafabady, Y. Malhi, L. E. 0. C. Aragdo, L. 0. Anderson, R. B.
Myneni, and R. Nemani (2012), Persistent effects of a severe drought on Amazonian
forest canopy, Proc. Natl. Acad. Sci., pp. --.
Saatchi, S. S., and K. C. McDonald (1997), Coherent effects in microwave backscattering models for forest canopies, IEEE Trans. Geosci. Remote Sens., 35(4), 10321044, doi:10.1109/36.602545.
Schenk, H. J., and R. B. Jackson (2002), The global biogeography of roots, Ecol.
Monogr., 72(3), 311-328.
Schimel, D., B. B. Stephens, and J. B. Fisher (2014), Effect of increasing CO
2 on the terrestrial carbon cycle, Proc. Natl. Acad. Sci., 112(2), 436-441, doi:
10. 1073/pnas.1407302112.
Schimel, D., et al. (2015), Observing terrestrial ecosystems and the carbon cycle from
space, Glob. Chang. Biol., pp. n/a-n/a, doi:10.1111/gcb.12822.
Schlesinger, W. H., and S. Jasechko (2014), Transpiration in the global water cycle,
Agric. For. Meteorol., 189-190, 115-117, doi:10.1016/j.agrformet.2014.01.011.
Schuler, D. L., J. S. Lee, and T. L. Ainsworth (1999), Compensation of terrain azimuthal slope effects in geophysical parameter studies using polarimetric SAR data,
Remote Sens. Environ., 69(2), 139-155, doi:10.1016/S0034-4257(99)00017-6.
Schultz, H. R. (2003), Differences in hydraulic architecture account for nearisohydric and anisohydric behaviour of two field-grown Vitis vinifera L. cultivars during drought, Plant, Cell Environ., 26(8), 1393-1405, doi:10.1046/j.13653040.2003.01064.x.
Sellers, P. J. (1985), Canopy reflectance, photosynthesis and transpiration, Int. J.
Remote Sens., 6(8), 1335-1372, doi:10.1080/01431168508948283.
Seneviratne, S. I., T. Corti, E. L. Davin, M. Hirschi, E. B. Jaeger, I. Lehner,
B. Orlowsky, and A. J. Teuling (2010), Investigating soil moisture-climate interactions in a changing climate: A review, Earth-sci Rev., 99(3aA4), 125-161, doi:
10.1016/j.earscirev.2010.02.004.
186
Shi, J., T. Jackson, J. Tao, J. Du, R. Bindlish, L. Lu, and K. S. Chen (2008),
Microwave vegetation indices for short vegetation covers from satellite passive
microwave sensor AMSR-E, Remote Sens. Environ., 112(12), 4285-4300, doi:
http://dx.doi.org/10.1016/j.rse.2008.07.015.
Simpson, E. H. (1949), Measurement of Diversity, Nature, p. 688.
Singh, J., and V. K. Singh (1992), Phenology of seasonally dry tropical forest, Curr.
Sci., 63(11), 684-689.
Skelton, R. P., A. G. West, and T. E. Dawson (2015), Predicting plant vulnerability
to drought in biodiverse regions using functional traits, Proc. Natl. Acad. Sci.,
112(18), 201503,376, doi:10.1073/pnas.1503376112.
Soil Survey Staff, Natural Resources Conservation Service, U. S. D. o. A. (), Web Soil
Survey.
Song, K., X. Zhou, and Y. Fan (2010), Retrieval of soil moisture content from microwave backscattering using a modified IEM model, Prog. Electromagn. Res. B,
26, 383-399.
Sperry, J. S., and D. M. Love (2015), What plant hydraulics can tell us about responses to climate-change droughts, New Phytol., 207, 14-27.
Sperry, J. S., and M. T. Tyree (1988), Mechanism of water stress-induced xylem
embolism., Plant Physiol., 88(3), 581-587, doi:10.1104/pp.88.3.581.
Sperry, J. S., U. G. Hacke, R. Oren, and J. P. Comstock (2002), Water deficits and
hydraulic limits to leaf water supply, Plant, Cell Environ., 25(2), 251-263, doi:
10.1046/j.0016-8025.2001.00799.x.
Staelin, D. H., A. W. Morgenthaler, and J. A. Kong (1998), Electromagnetic Waves,
562 pp., Prentice Hall, Upper Saddle River, NJ.
Steele-Dunne, S. C., J. Friesen, and N. Van De Giesen (2012), Using diurnal variation
in backscatter to detect vegetation water stress, IEEE Trans. Geosci. Remote Sens.,
50(7 PARTi), 2618-2629, doi:10.1109/TGRS.2012.2194156.
Stoy, P. C., and T. Quaife (2015), Probabilistic Downscaling of Remote Sensing Data
with Applications for Multi-Scale Biogeochemical Flux Modeling, PLoS One, 10(6),
e0128,935, doi:10.1371/journal.pone.0128935.
Tabatabaeenejad, A., and M. Moghaddam (2006), Bistatic scattering from threedimensional layered rough surfaces, IEEE Trans. Geosci. Remote Sens., 44(8),
2102-2114, doi:10.1109/TGRS.2006.872140.
Tabatabaeenejad, A., and M. Moghaddam (2011), Radar Retrieval of Surface and
Deep Soil Moisture and Effect of Moisture Profile on Inversion Accuracy, Geosci.
Remote Sens. Lett. IEEE, 8(3), 478-482, doi:10.1109/LGRS.2010.2087741.
187
Tabatabaeenejad, A., M. Burgin, X. Duan, and M. Moghaddam (2015), P-Band
Radar Retrieval of Subsurface Soil Moisture Profile as a Second-Order Polynomial
: First AirMOSS Results, IEEE Trans. Geosci. Remote Sens., 53(2), 645-658.
Teuling, a. J., S. I. Seneviratne, C. Williams, and P. a. Troch (2006), Observed
timescales of evapotranspiration response to soil moisture, Geophys. Res. Lett.,
33(23), 0-4, doi:10.1029/2006GL028178.
Thomsen, J. E., G. Bohrer, A. M. Matheny, V. Y. Ivanov, L. He, H. J. Renninger, and
K. V. R. Schdfer (2013), Contrasting hydraulic strategies during dry soil conditions
in Quercus rubra and Acer rubrum in a sandy site in Michigan, Forests, 4(4),
1106-1120, doi:10.3390/f4041106.
Tikhonov, A., and V. Arsenin (1977), Solutions of Ill-Posed Problems, Halsted Press,
New York.
Truong-Lol, M.-L., S. Saatchi, and S. Jaruwatanadilok (2015), Soil Moisture Estimation Under Tropical Forests Using UHF Radar Polarimetry, Geosci. Remote
Sensing, IEEE Trans., 53(4), 1718-1727.
Tucker, C. J. (1979), Red and photographic infrared linear combinations for
monitoring vegetation, Remote Sens. Environ., 150, 127-150, doi:10.1016/00344257(79)90013-0.
Tyree, M. T., and J. S. Sperry (1989), Cavitation and Embolism, Water, pp. 19-38.
Ulaby, F. T., and D. G. Long (2014), Microwave Radar and Radiometric Remote
Sensing, University of Michigan Press, Ann Arbor.
Ulaby, F. T., R. K. Moore, and A. K. Fung (1986a), Radar Remote Sensing and
Surface Scattering and Emission Theory, Microwave Remote Sensing: Active and
Passive, vol. II, Artech House, Norwood, MA.
Ulaby, F. T., R. K. Moore, and A. K. Fung (1986b), From theory to applications,
Microwave Remote Sensing: Active and Passive, vol. III, Artech House, Norwood,
MA.
Ulaby, F. T., K. Sarabandi, McDonald Kyle, Whitt Michael, and M. C. Dobson
(1990), Michigan microwave canopy scattering model, Int. J. Remote Sens., 11(7),
1223-1253, doi:10.1080/01431169008955090.
Van de Griend, A. A., and M. Owe (1994), Microwave Vegetation Optical Depth and
Inverse Modeling of Soil Emissivity Using Nimbus SMMR Satellite-Observations,
Meteorol. Atmos. Phys., 54(1-4), 225-239.
Van De Griend, A. A., and J.-P. Wigneron (2004), The b-factor as a function of
frequency and canopy type at H-polarization, IEEE Trans. Geosci. Remote Sens.,
42(4), 786-794, doi:10.1109/TGRS.2003.821889.
188
van der Molen, M. K., et al. (2011), Drought and ecosystem carbon cycling, Agric.
For. Meteorol., 151(7), 765-773, doi:10.1016/j.agrformet.2011.01.018.
van der Sanden, J. J. (2004), Anticipated applications potential of RADARSAT-2
data, Can. J. Remote Sens., 30(3), 369-379.
van der Schalie, R., R. Parinussa, L. Renzullo, A. van Dijk, C.-H. Su, and R. de Jeu
(2015), SMOS soil moisture retrievals using the land parameter retrieval model:
Evaluation over the Murrumbidgee Catchment, southeast Australia, Remote Sens.
Environ., 163, 70-79, doi:10.1016/j.rse.2015.03.006.
Van Emmerik, T., S. C. Steele-Dunne, J. Judge, and N. van de Giesen (2014),
Impact of diurnal variation in vegetation water content on radar backscatter of
maize during water stress, IEEE Trans. Geosci. Remote Sens., 16(7), 6070, doi:
10.1109/TGRS.2014.2386142.
A Closed-form Equation for
M. T. (1980),
van Genuchten,
Soilsi,
Unsaturated
of
Conductivity
the
Hydraulic
dicting
10.2136/sssaj1980.03615995004400050002x.
Predoi:
Van Zyl, J., and Y. Kim (2011), Synthetic Aperture Radar Polarimetry, JPL Space
Science and Technology Series, 312 pp., Wiley, Hoboken, NJ.
Vereecken, H., J. A. Huisman, H. Bogena, J. Vanderborght, J. A. Vrugt, and J. W.
Hopmans (2008), On the value of soil moisture measurements in vadose zone hydrology: a review, Water Resour. Res., 44, 1-21, doi:10.1029/2008WR006829.
Verhoest, N. E. C., H. Lievens, W. Wagner, J. Alvarez Mozos, M. S. Moran, and
F. Mattia (2008), On the Soil Roughness Parameterization Problem in Soil Moisture
Retrieval of Bare Surfaces from Synthetic Aperture Radar, Sensors, 8, 4213-4248,
doi: 10.3390/s8074213.
Walker, J. P., G. R. Willgoose, and J. D. Kalma (2002), Three-dimensional soil
moisture profile retrieval by assimilation of near-surface measurements: Simplified
Kalman filter covariance forecasting and field application, Water Resour. Res.,
38(12), 1301--.
Wand, M. P. (1997), Data-based choice of histogram bin width, Am. Stat., 51 (1),
59-64.
Wang, J. R., and T. J. Schmugge (1980), An Empirical Model for the Complex Dielectric Permittivity of Soils as a Function of Water Content, IEEE Trans. Geosci.
Remote Sens., GE-18(4), 106-107, doi:10.1109/TGRS.1980.350304.
Watanabe, S. (1960), Information Theoretical Analysis of Multivariate Correlation,
IBM J. Res. Dev., 4 (1), 66-82, doi:10.1147/rd.41.0066.
189
Western, A. W., G. Bloschl, and R. B. Grayson (2001), Toward capturing hydrologically significant connectivity in spatial patterns, Water Resour. Res., 37(1),
83-97.
Wieder, R. K., and S. J. Wright (1995), Tropical Forest Litter Dynamics and Dry
Season Irrigation on Barro Colorado Island, Panama, Ecology, pp. 1971-1979.
Wigneron, J. P., P. Waldteufel, a. Chanzy, J. C. Calvet, and Y. Kerr (2000),
Two-dimensional microwave interferometer retrieval capabilities over land surfaces (SMOS Mission), Remote Sens. Environ., 73(3), 270-282, doi:10.1016/S00344257(00)00103-6.
Wigneron, J.-P., M. Parde, P. Waldteufel, A. Chanzy, Y. Kerr, S. Schmidl, and
N. Skou (2004), Characterizing the Dependence of Vegetation Model Parameters
on Crop Structure, Incidence Angle, and Polarization at L-Band, IEEE Trans.
Geosci. Remote Sens., 42, 416--425, doi:10.1109/TGRS.2003.817976.
Wofsy, S. C., M. L. Goulden, J. W. Munger, S. M. Fan, P. S. Bakwin, B. C. Daube,
S. L. Bassow, and F. a. Bazzaz (1993), Net Exchange of C02 in a Mid-Latitude
Forest., Science, 260(5112), 1314-1317, doi:10.1126/science.260.5112.1314.
Woodhouse, I. H., E. T. A. Mitchard, M. Brolly, D. Maniatis, and C. M. Ryan (2012),
Radar backscatter is not a 'direct measure' of forest biomass, Nat. Clim. Chang.,
2(8), 556-557, doi:10.1038/nclimatel60l.
Xu, L., and D. B. Baldocchi (2003), Seasonal trends in photosynthetic parameters and
stomatal conductance of blue oak (\emph{{Q}uercus douglasii}) under prolonged
summer drought and high temperature, Tree Physiol, 23(13), 865-877.
Yamaguchi, Y., T. Moriyama, M. Ishido, and H. Yamada (2005), Four-component
scattering model for polarimetric SAR image decomposition, IEEE Trans. Geosci.
Remote Sens., 43(8), 1699-1706.
Yarovoy, A. G., R. V. de Jongh, and L. P. Ligthart (2000), Scattering properties
of a statistically rough interface inside a multilayered medium, Radio Sci., 35(2),
455-462.
Zhang, Q., S. Manzoni, G. Katul, A. Porporato, and D. Yang (2014), The hysteretic
evapotranspirationdATVapor pressure deficit relation, J. Geophys. Res. Biogeosciences, 119, 125-140, doi: 10.1002/2013JG002484.Received.
Zhou, L., et al. (2014), Widespread decline of Congo rainforest greenness in the past
decade., Nature, 509(7498), 86-90, doi:10.1038/naturel3265.
Zimmermann, D., R. Reuss, M. Westhoff, P. Geg ner, W. Bauer, E. Bamberg, F. W.
Bentrup, and U. Zimmermann (2008), A novel, non-invasive, online-monitoring,
versatile and easy plant-based probe for measuring leaf water status, J. Exp. Bot.,
59(11), 3157-3167, doi:10.1093/jxb/ernl7l.
190
Zribi, M., A. Gorrab, N. Baghdadi, Z. Lili-Chabaane, and B. Mougenot (2014), Influence of Radar Frequency on the Relationship Between Bare Surface Soil Moisture
Vertical Profile and Radar Backscatter, Geosci. Remote Sens. Lett. IEEE, 11 (4),
848-852.
Zweifel, R., H. Item, and R. Hdsler (2001), Link between diurnal stem radius changes
and tree water relations, Tree Physiol., 21(12-13), 869-877.
Zweifel, R., L. Zimmermann, F. Zeugin, and D. M. Newbery (2006), Intra-annual radial growth and water relations of trees: Implications towards a growth mechanism,
J. Exp. Bot., 57(6), 1445-1459, doi:10.1093/jxb/erjl25.
191