Manufacturing of Lab-on-a-Chip Devices:
advertisement

Manufacturing of Lab-on-a-Chip Devices:
Variation Analysis of Liquid Delivery using Blister Packs
by
Sivesh Selvakumar
B.E. Mechanical Engineering (2009)
College of Engineering, Guindy, India
Submitted to the Department of Mechanical Engineering
in Partial Fulfillment of the Requirements for the Degree of
Master of Engineering in Manufacturing
at the
MASSACHUSETTS INSTITUTE
OF TECHNOLOGY
Massachusetts Institute of Technology
NOV 0 4 2010
September 2010
LIBRARI ES
© 2010 Sivesh Selvakumar
All rights reserved
ARCHIVES
The author hereby grants to MIT permission to reproduce and to
distribute publicly paper and electronic copies of the thesis document in whole or in part
in any medium now known or hereafter created
Signature of Author............
..........
e artm t of Mechanical Engineering
..
g..
..'21ust 2 " 10
.......
. .......
Certified by...........
A..h.
....
Lectu
71
epartment of Mecanical Engineering
A
-"Ii
ThesMwSupervisor
A ccepted by............................................
David E. Hardt
Chairman, Committee on Graduate Students
This page has been intentionally left blank
Manufacturing of Lab-on-a-Chip Devices:
Variation Analysis of Liquid Delivery using Blister Packs
by
Sivesh Selvakumar
B.E. Mechanical Engineering (2009)
College of Engineering, Guindy, India
Submitted to the Department of Mechanical Engineering
in Partial Fulfillment of the Requirements for the Degree of
Master of Engineering in Manufacturing
Abstract
Components for on-chip storage and delivery of liquid reagent are necessary for many
commercial applications of lab-on-a-chip technology. One such system uses a 'blister pack' that
is pushed by an actuator. Over the course of product development, Daktari Diagnostics had
completed nominal design of a blister pack for their flow rate requirements. This work involved
performing a thorough variation analysis of the blister pack to determine the critical sources of
variation.
For this purpose, the tool of variation simulation modeling (VSM) was used. A numerical model
of the blister performance was developed and Monte Carlo simulations were conducted. The
results showed that this fluid delivery technique is robust and the number of out-of-specification
parts was less than 2%. The critical blister pack parameters that must be controlled were also
determined and these can be used to improve process capability.
Thesis Supervisor: Dr. Brian Anthony
Title: Lecturer
4
Acknowledgements
I wise to convey my gratitude to:
Aaron, Bill, Robert, Peter,Andy and Betsy, for being such great hosts at Daktari Diagnostics.
Your enthusiasm and drive for the tasks at hand never ceased to amaze me. Working for Daktari
has been an absolute pleasure.
Rodrigo, my team-mate and friend, for his motivation and for the 'occasional' advice. Much of
this work owes its existence to your input and hard work. It has been a pleasure to work with you.
Dr. BrianAnthony, our thesis advisor, for his support and encouragement throughout what has
been, in many ways, a unique project experience.
Jennifer Craig, our writing advisor, who surely spent many hours reading several last-minute
drafts. Without her support and eye for detail, this thesis would have suffered in quality.
The folks at the Edgerton Student Shop for their understanding and much-needed suggestions
through many hours of machining. This project has gained a lot from their experience.
Amma, Appa and Appayya for making all of this possible.
6
Table of Contents
Acknowledgements
5
Table of Contents
7
List of Figures
11
List of Tables
13
1. Introduction
15
1.1 The M.Eng. Capstone Project
16
1.2 Overview of the Thesis
16
2. Product and Project Overview
19
2.1 Company Background
19
2.2 ProductDescription
19
2.2.1 The Cartridge
20
2.2.2 The Instrument
21
2.2.3 Product Timeline
22
2.3 Problem Statement
23
2.3.1 Survey of Manufacturing Issues
23
2.3.2 Selection of Subset of Problems
25
3. Background Research
3.1 Lab-on-a-ChipApplications
3.1.1 CD4+ Cell counting through Cell Lysate Impedance Spectroscopy
3.2 MicrofluidicDevice Architecture
27
27
27
28
3.2.1 Central Layer
29
3.2.2 External Layer
29
3.2.3 Additional Components
29
3.3 Lab On a Chip Technologies
30
3.4 Lab-on-a-Chip ManufacturingProcesses
31
3.4.1 Part Manufacturing
31
3.4.2 Functionalization Process
32
3.5 Monte CarloAnalysis
33
3.6 Machine Vision for Metrology
34
3.6.1 Choice of Metrology System
34
5.1.2 Components of a Machine Vision System
34
4. Development of the Blister Performance Model
37
4.1 Working of the DaktariBlister Pack
37
4.2 Requirements of the Blister Numerical Model
38
4.2.1 Blister Outputs and Noise Factors
4.3 The Numerical Model
40
41
4.3.1 Input Blister Dimensions and Speed of Travel
43
4.3.2 Step Size
43
4.3.3 Determine Actuator Positions according to Step Size and Misalignment
44
4.3.4 Calculate the total volume of fluid expelled up to the current step
46
4.3.5 Volume expelled in the current step
51
4.3.6 Getting the 'instantaneous' flow rate
51
4.3.7 Calculate the average, maximum and minimum flow rates
53
4.4 Assumptions
5. Validation of the Blister Model
5.1 MeasurementSetupfor Blister Dimensions
53
55
55
5.1.2 Selection of Hardware
55
5.1.3 Selection of Software
56
5.1.3.1 Gauge Repeatability and Reproducibility
57
5.2 MeasurementSetupfor Blister Flow
58
5.3 Validation of Blister Numerical Model
58
6. Monte Carlo Analysis and Regression Models
61
6.1 Manufacturing Variation Data
61
6.2 Monte CarloAlgorithm
62
7. Results and Discussion
63
7.1 Flow Rate Variation after considering only BlisterDimensional Variation
63
7.2 Flow Rate Variation after considering the variation in all dimensions
65
7.3 Regression on the Average Flow Rate
67
7.4 Regression on the Range of Flow Rates
68
7.5 Effect of Variation in Individual Dimensions on Flow Rate
69
7.5.2 Effect of Spherical Radius Variation
69
7.5.3 Effect of Blister Height Variation
70
7.5.4 Effect of Actuator Radius Variation
71
7.5.5 Effect of Starting Height Variation
72
7.6 Flow Rate Variation after consideringthe effect ofshimming
73
8. Conclusions and Recommendations
75
9. Future Work
77
9.1 BlisterModel Validation
77
9.2 Study of Dimensional Variation in Blisters
77
9.3 Increasing the Number of Runs in the Monte Carlo Simulation
77
9.4 Electrode Foils - ConfigurationStudy and ProcessAnalysis
77
9.5 FunctionalizationProcessOptimization
78
9.6 Injection Molding of the Backbone - Normalization Time Optimization
78
9.7 Valve-Solenoid Interaction Robustness Study
78
9.8 Effect of Imprecise Actuator Movement
78
References
81
10
List of Figures
Figure 1: Daktari Diagnostics CD4 Cell Counting Platform
19
Figure 2: The Daktari cartridge - with parts marked
20
Figure 3: The Daktari instrument - with parts marked
21
Figure 4. Assay Process Diagram
28
Figure 5. Microfluidic Device Architecture
29
Figure 6. Functionalization Process
33
Figure 7: Schematic of Metrology System using Machine Vision
35
Figure 8: Photograph of a Blister Pack (above) and Actuators (below)
37
Figure 9: Blister actuation process
38
Figure 10: Required Outputs from a Mathematical Model of the Blister
39
Figure 11: Particular blister dimensions that affect the flow rate
40
Figure 12: Flowchart of Blister Numerical Model
42
Figure 13: Effect of small step size on flow rate measurement
43
Figure 14: Effect of large step size on flow rate measurement
44
Figure 15: Introducing the effect of actuator misalignment and step size
44
Figure 16: Usage of transformation matrices to convert actuator coordinates to the blister coordinate system
45
Figure 17: Discrete Volume Calculation
46
Figure 18: Flowchart for Blister Volume Calculation
47
Figure 19: Intersection of Actuator and Blister at a particular height
48
Figure 20: Possible Scenarios when a Blister and Actuator Intersect
49
Figure 21: Calculating the area of a Circle-Circle Intersection
50
Figure 22: Volume Expelled in the Current Step
51
Figure 23: Total Volume Expelled vs. Crush Depth
52
Figure 24: Time taken for a Step versus the Crush Depth
53
Figure 25: Schematic of Blister & Camera Setup
55
Figure 26: Photograph of Blister Measurement Setup
56
Figure 27: Photographs of the Blister Using the Current Setup
56
Figure 28: Blister diameter (in no. of pixels) measured by 2 operators
57
Figure 29: Blister Height (in no. of pixels) measured by 2 operators
57
Figure 30: Plot of Experimental and Predicted Flow Rates from 5 Blisters
59
Figure 31: Flowchart of the Monte Carlo Algorithm
62
Figure 32: Distribution of Flow Rates considering only Blister Variation
64
Figure 33: Distribution of Flow Rates considering variation in all dimensions
66
Figure 34: Flow Rate Profile with a Smaller Spherical Radius
69
Figure 35: Flow Rate Profile with a Larger Spherical Radius
70
Figure 36: Flow Rate Profile with a Smaller Blister Height
70
Figure 37: Flow Rate Profile with a Larger Blister Height
71
Figure 38: Flow Rate Profile with a Smaller Actuator Radius
71
Figure 39:Flow Rate Profile with a Larger Actuator Radius
72
Figure 40: Flow Rate Profile with Lower Actuator Starting Height
72
Figure 41: Flow Rate Profile with Higher Actuator Starting Height
73
Figure 42: Distribution of Flow Rates considering the effect of shimming
74
List of Tables
Table 1: Product Development timeline
22
Table 2: List of Potential Cartridge-Instrument Interaction Issues
25
Table 3: List of Potential Issues during Ramp-up
26
Table 5: Variation Data for the Blister and Actuator Dimensions
61
Table 6: Summary of Output Distribution Properties considering the variation in blister dimensions alone63
Table 7: Increase in Percentage of Non-conforming Blisters with tighter tolerance ranges
65
Table 8: Summary of Output Distribution Properties considering the variation in all relevant dimensions 67
Table 9: Increase in Percentage of Non-conforming Blister-Actuator Systems with tighter tolerance ranges
67
Table 10: List of Coefficients for Linear Regression on Average Flow Rate
68
Table 11: List of Coefficients for Linear Regression on Range of Flow Rates
68
Table 12: Summary of Output Distribution properties considering the variation in all relevant dimensions73
Table 13: Percentage of Non-conforming Blister-Actuator Systems after shimming
74
14
1. Introduction
The field of microfluidics has been the subject of several decades of research. As a sub-field of
MEMS/MST (Micro Electromechanical Systems/ Microsystems Technology), microfluidics
promises the integration of various liquid preparation/processing steps along with the sensors
(optical, electronic or otherwise) that enable the complete analysis of samples. These so-called
labs-on-a-chip (LOC) have the potential to revolutionize any application where the analysis or
use of small quantities of fluid is useful. Some of these applications include immunoassays,
pharmaceutical drug discovery, genomics and proteomics, cytology and biotechnology, drug
delivery and surface patterning [1].
Despite this immense potential, till date, the commercial impact of the field has been minimal [1].
This may be attributed to several factors: the absence of commercial needs, low understanding of
fabrication technology and the lack of expertise in microfluidic product industrialization.
However, the situation appears to be changing.
Point-of-care (POC) diagnostics has recently emerged as an ideal market for LOC technology.
Currently, most diagnostic tests are performed in centralized laboratories which account for
around 60% of the 2004 market revenue [2]. Another 30% of the market is commanded by POC
diagnostics but these are almost exclusively for glucose-monitoring. For a number of other
pressing problems such as HIV, TB and malaria, POC solutions are practically non-existent.
Microfluidic technology can make these solutions possible [3].
The size of the problems that these diseases pose can be understood by the sheer number of
people affected by them. HIV affects nearly 33 million people worldwide [4]. TB affects another
9.4 million causing around 1.3 million deaths [5]. Nearly 300-500 million people are infected
with malaria [6]. For all these infectious diseases, POC diagnostics promises to decrease the time
between the first visit to the doctor and the beginning of treatment [7]. In many situations, this
can lead to improved health outcomes. For example, for HIV patients on anti-retroviral therapy
(ART) a key test, called the CD4 count, is used to monitor their immune system [8]. Recent
efforts to scale ART in developing countries quickly highlighted the CD4 test as a significant
bottleneck. POC promises to relieve this problem.
Keeping pace with the growing interest in LOC, is the constantly increasing understanding of
microfluidic fabrication technology. A great deal of work has been done [9-13] to better
understand and optimize these processes. Several organizations (e.g.: Inverness, Abbott Point of
Care, Daktari Diagnostics, Claros, Diagnostics 4 All) are taking advantage of these developments
and are actively involved in the POC equipment field. Thus, there is a growing interest in the
process of microfluidic product industrialization.
As a new entrant in the medical device space, Daktari Diagnostics (hereafter referred to as
Daktari) is currently involved in the process of product industrialization. A number of issues
related to reliable production of their microfluidic product are being addressed during this phase.
Some of these issues are: product tolerance analyses, design for manufacture and assembly
(DFMA) and identification of critical-to-function paths.
In this thesis, the manufacturability of one component of the Daktari LOC system - the 'blister
pack' - has been studied extensively. The blister pack is responsible for storing liquid reagents in
the product and then delivering these at a controlled flow rate. Its performance is affected in
many ways by manufacturing variation and this effect was fully explored. Numerical models
relating blister performance to their dimensions were developed and key input parameters that
must be controlled to ensure good performance were identified.
1.1 The M.Eng. Capstone Project
This thesis is the result of a group project that has been completed as part of the requirements of
the Masters of Engineering in Manufacturing program at the Laboratory for Manufacturing and
Productivity (LMP) at MIT.
A team of students approached the research problems
collaboratively and then each team member focused on a different research challenge. The author
of this work, Sivesh Selvakumar, focused on blister manufacturing issues. Rodrigo Linares [14]
focused on instrument manufacturing issues. Together, the two theses represent the complete
analysis of the problem of microfluidic device tolerance analysis.
1.2 Overview of the Thesis
This thesis begins with a description of the company, product and problem statement in Chapter
2. This is followed by a comprehensive literature review of the state-of-the-art in microfluidic
fabrication technology and assembly strategies in Chapter 3. Chapter 4 presents the development
of a numerical model that relates the geometry of the 'blister pack' to its flow performance.
Efforts to validate this model are presented in Chapter 5. Chapter 6 describes the methodology of
Monte Carlo simulations used to study the effect of manufacturing variation on the blisters. The
results of these simulations along with suitable conclusions are presented in Chapter 7. Our
recommendations for future work follows in Chapter 8.
18
.....
..................
...
.....................
................
2. Product and Project Overview
2.1 Company Background
Daktari Diagnostics is a medical diagnostic company located in Cambridge, Massachusetts, USA
that utilizes unique technology for various high-impact diagnostic applications. The company has
dedicated its product line to various diagnostic tests that will have a strong positive effect on
global health. Their first product is a point-of-care diagnostic platform for HIV patients. The
product is designed to be easy-to-use, robust and inexpensive - suited to developing countries
where this test is a major bottleneck to effective delivery.
2.2 Product Description
The diagnostic platform that is being designed by Daktari Diagnostics is a CD4 counter that is
necessary for HIV patients. Similar to a glucometer (which provides patients suffering from
diabetes with a value of their blood glucose concentration), the CD4 counter provides caregivers
with the white blood cell concentration in an HIV patient's blood. This value indicates the
relative strength of the patient's immune system and can be used to determine the appropriate
dosage and strength of anti-retroviral drugs (ARV). Figure 1 shows the process that goes into a
CD4+ T-Cell count using Daktari's System.
1.Blood is introduced to
disposable, which is
inserted into instrument
2. CD4 cells are captured
chermicaly, without sample
preparation
Cartridge
3. CD4 cells are detected and
counted electrochenically,
without optics or labels
Instrument
Figure 1: Daktari Diagnostics CD4 Cell Counting Platform
The typical use scenario involves a trained operator carrying the portable 'instrument' and a set of
'cartridges' to remote locations where the test is unavailable in its current form. Using a lancet,
the operator pricks the patient's finger and allows the patient's blood to enter the card at a sample
entry port. The card draws the blood in by means of capillary action. After sufficient blood is
drawn in, the sample entry port is closed using a cap and the card is loaded into the instrument.
The instrument begins driving the blisters in a carefully designed sequence of operations that
prepares the blood sample and then sends it through the assay chamber. The antibodies deposited
on the channel capture the CD4 cells. The cells are then lysed ('lysis' refers to the rupture of a
cell's membrane) in a high-impedance solution. This releases low-impedance cellular contents
into the assay chamber. The difference in impedance at this stage is used to determine the
concentration of cells in the blood [15]. The CD4+ cell concentration value is then displayed
using an LCD display and the test concludes.
The platform consists of two parts: an instrument and several disposable cartridges.
2.2.1 The Cartridge
Each cartridge is a disposable microfluidic device complete with reagents and a sensing
mechanism to measure the concentration of CD4 cells in blood. Figure 2 depicts a prototype of
the microfluidic card with the following 6 parts:
Housing
Blister
Cap
Backbone with microfluidic channels
Lid foil on the back
Electrode Foil
Figure 2: The Daktari cartridge - with parts marked
1. Backbone - an injection molded polymer card with microfluidic channels
ck
. ....
....
....
.. .
.
... ............
......
........
2. Lidfoil - a transparent polymeric sheet that is bonded to one side of the backbone and
forms the fourth wall of the channels
3. Functionalizedfoil- a polymeric foil that covers the 'assay chamber' where the CD4
cell count is performed. This foil has a gold electrode layer formed on it. It is then coated
with antibody solution, which is used to immobilize the target CD4 cells.
4. Blisterpack - similar to a pharmaceutical blister pack, this part contains the liquid
reagents that are necessary for sample preparation
5. Housing - an injection molded polymer part that protects the blister pack and
functionalized foil during transport
6. Cap - plastic part that covers the sample entry port after blood is introduced into the
cartridge
2.2.2 The Instrument
The instrument is designed to be portable, battery-powered and electronically controlled. It
contains linear actuators to 'pop' the blisters and flow reagent through the cartridge's channels.
Figure 3 shows a photograph of the instrument.
Handle for holdin the device
Figure 3: The Daktari instrument - with parts marked
The instrument also has suitable electronic interfaces, which connect to the cartridge and measure
the impedance within the assay chamber. This impedance measurement is used to determine the
final level of CD4 cells within the device. In addition, the electronics necessary to drive the
actuators, calculate the CD4 count and output this value to the LCD display are also present. The
instrument is both the driver of the reagents and the user interface medium between the system
and the user. In order to accomplish all these functions, the proper integration of the following
subassemblies must be accomplished.
1. Frame - the main structural component of the instrument. It locates the different
subassemblies.
2. Door Subassembly - holds the cartridge in place and guarantees planarity between the
cartridge and theframe.
3. Actuator Subassembly - carries the actuators and ensures perpendicularity between these
and theframe.
4. Solenoid Subassembly - supports the valve solenoids and ensures perpendicularity
between the solenoids and theframe.
5. Outer Casing - provides both aesthetics and protection from impacts and dust.
2.2.3 Product Timeline
Table 1 below depicts the high-level view of the product development timeline for Daktari. It
involves the development of two prototypes (gamma and alpha) that will be used to solve various
anticipated issues. The final one i.e. beta will be the first production-level product. This thesis
focuses on issues related largely to the alpha and beta stages.
Table 1: Product Development timeline
Purpose
Production Quantities of:
a) Cartridges
a) Instruments
Proof-ofconcept for
investors
1
1
Run clinical
trials and
establish the
reliability and
repeatability
of the test
1000s
10s
First
production
product
350,000 (per year)
150 (approx.)
2.3 Problem Statement
As Daktari moves from prototype to production i.e. alpha to beta, a number of issues will need to
be addressed in order to ensure reliable, cost-effective production. Typically, the effect of
manufacturing variation on the functionality of the proposed design must be understood. With
this knowledge, a range of design parameters may be optimized leading to a more robust design.
In some situations a conflict between design requirements and inherent manufacturing limitations
may arise. In this case, suitable quality control strategies must be provided.
All of these activities -both experimental and analytical - are commonly grouped together under
the umbrella term 'product industrialization'. The absence of such a step often leads to bad
designs which, when put into production, lead to poor quality, wasteful processes, high
production cost and long lead times. Thus, it becomes important to understand that a good
product is one that not only performs its intended function when 'perfect' but is also easy to
manufacture, easy to assemble and, hence, economical to produce.
The aim of this M.Eng. project is to analyze and propose solutions for issues related to the
mechanical robustness of the Daktari system. Accordingly, a survey was first done to list all
issues that will require attention en route to mass production.
2.3.1 Survey of Manufacturing Issues
The Daktari POC system uses a number of components that have not been used extensively
previously and so several areas require further study:
a. The Electrode Foil Manufacturing process
The electrode foils on the cartridge are critical to the sensing process of the LOC system.
Preliminary studies indicate that repeatability of the impedance measurement can be strongly
related to the exact electrode configuration and manufacturing defects. Further study is required
to understand this phenomenon and ensure repeatability.
b. Functionalization process
The functionalization process refers to the process of depositing antibody solution on the
electrode foil (see Section 3.4.2 for detailed description) . This process is again critical to the
success of the assay because improperly coated antibody can result in several problems:
* improper bonding between the electrode foil and the backbone leading to leaks
* variability in the number of CD4+ cells captured by the system leading to low repeatability
in results
c. Injection Molding of the Backbone
The injection molding process of microfluidic devices often requires very large normalization
times - the time required for the plastic to reach its final dimensions - often in the order of days.
Any downstream processing that affects normalization process or requires the dimensions that are
affected by it cannot be performed until the normalization is complete. This results in long lead
times which could be a potential issue in manufacturing. (resulting in large inventories and
associated storage costs)
Although, this issue could have a large impact on the manufacturing cost of the final product,
currently it does not seem to be critical to the product functionality.
d. Robustness of Instrument- Cartridge Interactions
i) Blister - Actuator Interaction
The interaction between the blister and the actuator produces the required flow in the final device.
Precise movement of a precision-machined actuator ensures controlled flow. However, the
amount of control obtained based on current design specifications and manufacturing variation is
unknown and should be studied to confirm flow rate tolerances.
ii) Valve - Solenoid Interaction
The valve and the solenoid together ensure control over the direction of fluid flow within the
cartridge. This is important as leaking valves (valves that are open when they should be closed)
and 'sticky' valves (valves that are closed when they should be open) can seriously affect assay
performance. A tolerance analysis of this step should be performed to determine the effect of
misalignment.
iii) Vent hole - Puncture Pin Alignment
The vent hole is a weak portion of the backbone that is designed to be opened by a pin in the
instrument. This is necessary to open the system to the environment allowing fluids to be run
through without causing air compression. Failure to open the vent hole can be critical to product
success as it may become nearly impossible for the actuators to pump fluid through the system.
iv) Electrode Gold Pads - Electric Connector Interface
The electrical connection between the electrode foil and the instrument is critical to the reading
the results of the assay. A failed connection will prevent impedance measurements from being
taken. However, this connection also has much tolerance built into it and it is not believed that it
will cause much problem.
The above cartridge-instrument interaction issues are summarized in Table 2.
Table 2: List of Potential Cartridge-Instrument Interaction Issues
Interface
Tolerable Variation
Approximate Manufacturing
Variation
Blister - Actuator
Unknown
Several mm
Valve - Solenoid
Unknown
Several mm
Vent Hole - Puncture Pin
0.5 mm (radial)
Several mm
Electrode Contact Pad -
+/- 1 mm
Several mm
Instrument Electrical Connector
2.3.2 Selection of Subset of Problems
Table 3 displays a list of the above issues along with a note about their importance (for product
function) and likelihood of occurrence. From this list, issues related mainly to the mechanical
robustness of the device were selected. These were all the issues under sub-section 'd'.
Table 3: List of Potential Issues during Ramp-up
Importance for
Product Function
Likelihood of
Occurrence
a. Electrode Foil Manufacturing
High
High
b. Functionalization
High
High
c. Injection Molding of backbone
Low
Low
i) blister-actuator
Medium
Medium
ii) valve-solenoid
Medium
Medium
High
Low
Issue
d. Robustness of Interactions
iii) vent hole -puncture pin
iv) electrode contactpatch
- instrument contactpins
High
Low
It was proposed that a detailed tolerance analysis of the entire system be performed to determine
the overall stack-up of manufacturing variation on the various interfaces. In addition, the
influence of this variation on the performance of the interfaces would be studied to determine
their effect.
In particular, greater focus was to be placed on the blister-actuator interface. A numerical model
relating blister performance to the dimensional variations was developed in this thesis and this
model was used in conjunction with the tolerance analysis of the entire system developed by
Linares [14]. Linares [14] also performed the tolerance analysis for the remaining interfaces. This
study would lead to a better understanding of the interfaces and permit the suggestion of suitable
solutions for optimizing the designs.
3. Background Research
Initial research focused on understanding the applications of microfluidics (Section 3.1) and,
thereafter, on studying the state-of-the-art in microfluidic device architecture (Section 3.2),
components (Section 3.3) and manufacturing processes (Section 3.3). This was done in order to
fully understand the interactions between this study on robustness and the design and
manufacturing of Daktari's microfluidic device.
After this preliminary research, the tools and techniques used in this thesis were explored. This
includes the technique of Monte Carlo simulations used for variation analysis and the use of
machine vision for metrology.
3.1 Lab-on-a-Chip Applications
An extensive survey was done by Korb [1] on the various potential applications of microfluidics.
It quickly became apparent that most applications were in biochemistry and related fields. The
applications can be grouped as: assays, drug discovery, genomics and proteonomics, cytology and
biotechnology, drug delivery and surface patterning.
The CD4+ sensing system falls into the cytology and assay category. In cytology, microfluidics is
used to sort cells and select ones of interest. In assays, the presence or concentration of a
substance is determined. For example, the purpose of Daktari's microfluidic device is to perform
an assay on a fixed volume of blood and determine the concentration of CD4+ cells.
3.1.1 CD4+ Cell counting through Cell Lysate Impedance Spectroscopy
This is the technique used by Daktari in its CD4+ Cell Counter System. In this method (see
Figure 4), cells are first immobilized by the use of cell affinity chromatography [16]. Then, the
cells are lysed, and a drop in impedance is produced due to the different electrical properties of
the cellular contents. The change in impedance is measured using the electrode foil. It is
converted to a change in conductance. The magnitude of this change increases linearly with the
number of immobilized cells [15]. These methods showed a close correlation between the CD4
cell counts when comparing the microfluidic device and flow cytometry [17].
ya
F1'i
Y
+ CC
Y
Antibody
Red Blood Cell
CD4+ Cel
Figure 4. Assay Process Diagram. (A) Blood is ran through the assay chamber and CD4+
cells are captured. (B) Red blood cells are washed. (C) CD4+ cells are lysed and difference
on impedance is measured.
3.2 Microfluidic Device Architecture
The architecture of microfluidic devices is similar to that of Printed Circuit Boards (PCB). These
devices are formed by different layers each performing a specific function. Figure 4 shows a
typical arrangement consisting of one or more central layers (backbone) where open micro
channels are formed (usually with 2.5D features) and one or two external layers to close the
channels. Additionally external connections, valves, pumps and sensors are often added.
............
. . ..
..
.........
.......
Additional Component
Central Layer
External Layer
Figure 5. Microfluidic Device Architecture
3.2.1 Central Layer
This layer is often the functional part. All the features, such as microchannels, mixers, reservoirs
and other components are formed in this layer. Its complexity varies from a simple piping
system to a complex set of mechanisms.
3.2.2 External Layer
Its purpose is usually to close the channels and features on the central layer. Additionally
functionality is often added to this layer using PCBs, sensors and outputs from other systems.
3.2.3 Additional Components
In addition to the above, microfluidic devices typically contain other components that perform
external flow control, internal flow control and sensing.
ExternalFlow Controlmechanisms are added to provide an external means of delivering reagents
into the Lab-on-a-Chip (LOC). The work involved in pumping arises from non-microfluidic
interactions. Some examples are external reservoirs (where the column of liquids drives the
fluids), actuators ( which push liquid-filled blisters), external valve systems and syringe pumps.
InternalFlow Controlcomponents fulfill the same purpose as those placed externally. However,
flow arises due to interactions with microfluidic features. Examples include peristaltic or pressure
driven pumps, valves, mixers, separators, reactors, etc.
Sensing components are often put into place on the external layers of the device. Commonly
these are used to measure pressure, temperature or electrical properties (impedance, capacitance,
etc.). Additionally, much attention has been focused on optical sensing systems.
3.3 Lab On a Chip Technologies
For a microfluidic device to perform any particular function, whether that be an immunoassay or
genome sequencing, several proven technologies are currently available to the engineer or
researcher that can be used as tools or components to achieve their goals. Among them we have
microfilters, microneedles, micromixers, microreactors, microdispensers and microseparators.
Nguyen [18] provides a very good description of these technologies and its applications in life
sciences.
Microfilters are used for either filtration or collection depending on whether the substance of
interest is a liquid that is contaminated by particles or the particles themselves. Both of these
functions are achieved through the use of membranes or gaps built into the microfluidic piping
system.
Microneedles are used for drug delivery, cell manipulation and interconnection between micro
and macrofluidic systems.
Micromixers combine two or more reagents to make a reaction possible. The advantage of this
technique lies in the efficient use of reagents. The key difference between macro and micro scale
is the mechanism of mixing - macroscale mixing uses turbulence whereas microscale mixing
depends on much slower diffusion processes on account of the low Reynolds' number in
microfluidic channels.
Microreactorsaccomplish the same tasks as their macroscopic counter parts, but with several
advantages. The reactions are easier to control, reducing the danger of an explosion or fire.
Additionally if dangerous substances are released, they are easily contained. They offer a cost
advantage both in manufacturing and in their operation. They are easy to scale from laboratory to
commercial applications. Finally they offer small thermal inertia, high gradients, uniform
temperature, short residence time and high surface to volume ratio.
Microdispensersprovide precise reagent delivery. Examples include microscopic injectors,
pipettes or dosing systems.
Microseparatorsprovide substance or particle separation. Microfilters can be considered as a
category of microseparator that discriminate by particle size and geometry. Microseparators take
advantage of difference on weight, electrical, magnetic or thermal properties.
3.4 Lab-on-a-Chip Manufacturing Processes
Each of the parts of the microfluidic device architecture can be produced using a multitude of
processes. In the literature, most attention has been given to the central layer manufacturing
process because all the functional features are often built into this layer.
Additionally, and equally important, are the processes for assembly of the several layers. These
processes involve alignment, placement and binding.
The materials in which the devices are made greatly influence the process in which it is
constructed. The most common material used for LOCs are glass, polydimethylsiloxane (PDMS)
and polymethylmethacrylate (PMMA). Glass and PDMS are commonly used in laboratories since
fast and precise prototyping techniques exist that allow researchers to iterate rapidly between
different designs. Many of the techniques used in the semiconductor industry are borrowed to
achieve nano-scale features. Also, many components of LOCs (e.g.: some kinds of valves and
pumps) are only achievable on PDMS since they take advantage of the material's elastic
properties.
PMMA presents bigger difficulties for prototyping. Tooling fabrication is required, thus
increasing the turnaround time. Nevertheless, since the 2000s there has been a growing consensus
on the use of polymeric materials for microfluidic commercial applications [12]. Attia et al [13]
performed a useful comparison between the different materials used on microfluidic devices.
3.4.1 Part Manufacturing
Korb [1] also performed a detailed survey on the manufacturing processes currently in use and
their advantages and drawbacks. For central layer manufacturing, two methods were considered
for this work due to their high throughput - injection molding and micro embossing. For external
layer manufacturing, typical processes include rolling, molding and extrusion of thermoplastics.
Injection molding is a well-known manufacturing method that can be used to produce complex
forms out of thermoplastics. There have been successful attempts to replicate square features with
a width of 310 nm and depth of 220 nm [19]. It is highly suited to large scale manufacturing due
to its dimensional control, short cycle times and high throughput. The challenge of bringing this
technique to the micro scale lies in tooling construction. To the author's knowledge, injection
molded microfluidic parts have been limited to having 2.5 D features.
Micro-embossing involves raising the temperature of a blank polymer piece beyond its
crystallization point followed by pressure to transfer features from a tool to the blank. The
process has been shown to allow nanometer scale features [12] with high accuracy and precision.
Its primary advantage over injection molding is in lower tooling costs and potentially lower cycle
time. However, the process is limited in the complexity of features that can be created. Also,
when an embossed part is subjected to high temperatures in subsequent operations (such as
thermal bonding) the surface stresses tend to relax leading to a softening of the features.
Overall, the use of injection molding appears to be preferred to the greater flexibility and the
fewer manufacturing steps.
3.4.2 Functionalization Process
Functionalization refers to the deposition of antibody on one or more parts of the product. The
process is not well-understood and successful applications tend to be based on empirical
experience rather than an actual understanding of the phenomena that take place.
Antibodies can be deposited onto solid phases by three different mechanisms [20]:
1. Adsorption to hydrophobic surfaces
2.
Covalent attachment to activated surface groups
3. Non-covalent, electrostatic and hydrophilic bonds by either of the before mentioned.
It is a requirement for Daktari that the antibody be deposited in a specific area of the electrode
foil. Currently, this is accomplished using a masking process. The mask is placed on the electrode
and the open cavities in the mask are filled with antibody solution. After a certain amount of time
(termed 'incubation' time), the antibody solution is removed and the foil is allowed to dry. This
multi-step process is illustrated in figure 6. Often, the antibody layer must be stabilized using a
sugar layer as well.
......
...
.......
1. Electrode Foil is covered with a mask
2. Antibody solution is added
3. Antibody is attached to Foil substrate
4. Excess solution is removed
5. Sugar solution is added
6. Sugar solution is dried
7. Mask is then removed
-Foi
Mask
Figure 6. Functionalization Process
3.5 Monte Carlo Analysis
Monte Carlo simulations are a technique for determining the parameters of an actual population
by taking random samples from a pseudo-population and then calculating statistics using that
sample. It involves the two steps of actually creating a pseudo-population of interest and then
sampling from this population so that various statistics may be calculated.
The Monte Carlo technique is widely used in situations where the behavior of the statistic does
not lend itself to straightforward analytical evaluation. In such cases, Monte Carlo analysis can
simulate the required sampling distributions allowing inferences to be made.
The basic steps involved in Monte Carlo analysis are as follows [21]:
1. The creation of a pseudo-population (usually a mathematical algorithm or model)
2. Sampling from the pseudo-population in a manner consistent with the real process
3. Calculate the value of the statistic from the sample
4. Repeat 1, 2 and 3 for 'n' trials
5. Plot a frequency distribution of the statistic which can then be used for inference
This technique has been used in several studies [22-25] regarding manufacturability and tolerance
analysis because of the complex nature of the interactions. In this thesis, Monte Carlo simulations
are used to determine the effect of random variations in dimensions on the flow rate of reagents
delivered by the blister packs.
3.6 Machine Vision for Metrology
3.6.1 Choice of Metrology System
In order to accurately and repeatably measure the blister dimensions, two options were
considered: using a coordinate measuring machine (CMM) and using an optical setup (a machine
vision system). The CMM had the advantage of being more accurate (order of microns) and not
requiring calibration. However, as the blister was a non-rigid part, and the CMM used a force
sensor attached to a probe to measure the dimensions, its effect on the blister dimensions was
unknown. As a result, the optical system was chosen. The optical system also had the advantage
of having a much lower measurement time per blister.
5.1.2 Components of a Machine Vision System
A machine vision system for measurement consists of two separate, yet inter-related, systems: the
hardware and the software. The hardware involves all the parts of the machine vision chain that
are responsible for producing a high-contrast, high-resolution image of the object that is being
measured [27].The software is responsible for analyzing the image and obtaining the required
dimensional information.
HARDWARE
SOFTWARE
Data Acquisition
Lighting
Camera
Computer
Oiage
Anasnis
Output Mecasurements
ObNect to be
Measured
Figure 7: Schematic of Metrology System using Machine Vision
The hardware includes fixtures for repeatably mounting the objects to be measured, appropriate
lighting that provides a suitable amount of contrast and a camera of sufficient resolution to
capture the image. The camera is essentially a combination of the image sensor and the optical
elements (lenses, mirrors, etc.) necessary to project the required part of the image onto it.
The software includes the interface between the data acquisition system and the camera, the
imageprocessing algorithms that enable suitable extraction of information and the final image
analysis algorithms for measuring dimensions.
4. Development of the Blister Performance Model
The blister performance model described in this section is used to relate the dimensions of the
blister to its performance as measured by certain metrics. The process of creating the model
began with an attempt at an analytical expression to model the working of the blister. However,
the complex nature of the actuator and blister interaction quickly complicated the analysis and
was abandoned in favor of a more practical approach using numerical integration.
4.1 Working of the Daktari Blister Pack
Figure 8: Photograph of a Blister Pack (above) and Actuators (below)
The blister pack (Figure 8) is that part of the cartridge which is used to store the liquid reagents
used in the assay. It is similar to a blister pack that is used to store pharmaceutical tablets/capsules
and is manufactured using a similar cold forming process. Figure 9 depicts the blister pack in
action. An actuator is allowed to push down the blister until the seal breaks. Further movement
causes the liquid reagent to flow into the micro-channels on the backbone. Controlled actuation
should enable a constant flow rate through the micro-channels. The constancy of thisflow rate is
the most important performance measure of the blister pack.
I
V
I
ACrUATOR
BLISTER
1.The actuator begins
2. The actuator moves
down towards the
bhster with reagent
at the 'home' position
3. The actuator comes
into contact with the
blister
(shown in blue)
i
t
5. The actuator
6. As the actuator
continues to move
moves down, it slows
downwards forcing
reagent out of the
blister
down maintaining the
same flow rate
4
4. The actuator moves
down approximately
2.5mm to break the
blister seal (in red)
7.The actuator stops
moving when 184)
micro liters of reagent
flow out
Figure 9: Blister actuation process
For Daktari's current application, a tolerance of +/- 20% on the flow rate is believed to be
acceptable. For example, for a nominal flow of 20 pL/min, an actual flow rate that ranges
between 16 and 24pL/min is satisfactory. In order to maintain this constant flow rate, the speed of
the actuator is decreased as it moves down, in order to compensate for the increase in crosssectional area (Since, volume flow rate = linear velocity * cross-sectional area). Very precise
actuation is necessary to maintain a smooth flow and, to the knowledge of the author, such a
procedure has not been studied till date.
4.2 Requirements of the Blister Numerical Model
The blister model should be capable of sufficiently re-creating the working scenario described in
the previous section. Taking the actual dimensions of the blister and actuator as input, the model
should be able to give the flow rate of the fluid as a function of the position of the actuator (See
Figure 10).
Depth
Cru
A = B
= Total Volumc Expcllcd
A
at crush dcpth
a6 .E
E
Crush Depth
(mm)
Figure 10: Required Outputs from a Mathematical Model of the Blister
In addition, for purposes of studying the effect of manufacturing variation on the blister
performance, the model should include the continuously varying speed of the actuator as it
plunges into the blister.
y Y6 ;44Y!,! "
4.2.1 Blister Outputs and Noise Factors
The total volume of fluid required from each blister is 180pL. As the actuator tip plunges into the
blister, this 180pL of reagent should be expelled at a constant flow. Thus, the function of the
blister can be captured by the following two metrics:
1. Average flow rate: This captures the mean value of the flow rate.
2. Maximum of flow rate: This gives the upper bound of the flow rate due to nonconstancy of flow
3. Minimum of flow rate: This gives the lower bound of the flow rate due to nonconstancy of flow
The above metrics are depicted in Figure 10. The various variables, which affect the flow rate of
reagents in the channels, are as follows:
1. Base Radius
2. Spherical Radius
3. Blister height
4. Lateral Misalignment
5. Angular Misalignment
6. Actuator Radius
7. Actuator's Starting Height (i.e. initial position of the actuator above the blister)
Figure 11 depicts variable 1 -3 of the above list. These are related to the blister pack production
process while 5-7 are related to the instrument manufacture. Variable 4 is related to both. For the
purposes of this analysis, variables 1 through 4 are taken as noise factors.
0
Blister Radius
Figure 11: Particular blister dimensions that affect the flow rate
---
4.3 The Numerical Model
The numerical model is based on the use of numerical integrationto calculate the volume of the
blister at each step of the actuator. The motion of the actuator was discretized i.e. each step
movement of the actuator was associated with a particular amount of time. The blister itself was
divided into a set of discrete volume elements and its volume calculated at each step to determine
the volume of fluid expelled. Figure 12 is the flowchart of operations that must be performed by
the blister model. Each step is further discussed in the following sections.
START
Input Blister and
Actuator Dimensions
and Positions
Calculate TOTAL VOLUME
EXPELLED up to the current
step
Input Speed of Travel
LSet
Calculating VOLUME
EXPELLED IN CURRENT
STEP by subtracting the total
volume expelled up to the
previous step
Step Size =0.1mm
Determine all ACTUATOR
POSITIONS using
transformation matrices
Have all steps
been
completed?
Calculate INSTA NTANEOUS
FLOW RATE b y dividing the
volume expelle d by the time
taken by the actuator to
complete the step
No
A
Yes
Calculate the AVERAGE,
MAXIMUM AND
MINIMUM FLOW RATE
Output the above flow
rates
STOP
Figure 12: Flowchart of Blister Numerical Model
4.3.1 Input Blister Dimensions and Speed of Travel
The blister and actuator dimensions listed in Section 4.2.1 are provided to the mathematical
model in this step in order to re-create the geometric shape of the blister. The required flow rate
(5iL/min or 20RL/min based on the application) is also provided at this stage so that the
appropriate actuator movement curve is chosen.
4.3.2 Step Size
The 'step size' refers to the distance the actuator 'moves' during each step of the blister model.
By comparing Figure 13 and Figure 14, the effect of having large step sizes can be seenvariations in flow rate which are actually present can get smoothened out by averaging over a
larger range of movement. Thus, smaller values of the step size lead to better approximations of
the actuator movement at the cost of increased computation time. An optimal step value was
chosen based on trial and error.
Volume Expelled per unit time
(uL min)
Au
13
Figure 13: Effect of small step size on flow rate measurement
Volume Expeled per unit time
Af-
06
"
Figure 14: Effect of large step size on flow rate measurement
4.3.3 Determine ActuatorPositions accordingto Step Size and Misalignment
X
X
YA
The actuator position is based on an ideal
blister and so crush depth is always
measured downwards from the actuator axis
(in blue)
in order to account for the errors, the
actuator is given an initial position and
angular misalignment from the vertical
Figure 15: Introducing the effect of actuator misalignment and step size
In the physical system, the absence of a feedback loop to control actuator position could lead to
problems due to misalignments (shown in Figure 15). In order to study the effect of the
misalignments, they were included as inputs to the blister model at this stage. Both lateral and
angular misalignments were included using a set of transformation matrices (see Figure 16) to set
the initial position and angular misalignment separately. These matrices convert the unidirectional
movement of the actuator into a 2D movement in real space.
B
B
*Tab
UL.~
*
X
Tac
Tac transforms the
coordinate system C to the
blister coordinate system A
The product of Tac and
Tcb gives Tab which
transforms the actuator
coordinate system (B) to
the blister coordinate
system (A)
'-
Teb
Tcb transforms the
coordinate system from the
actuator (B in blue) to the
coordinate system C
Figure 16: Usage of transformation matrices to convert actuator coordinates to the blister
coordinate system
Here, Teb is the angular transformation matrix that re-orients the actuator coordinate system in the
same direction as the blister coordinate system. Then, it gets re-positioned to the blister
coordinate system by means of Tac, a positional transformation matrix.
1I
1mO
Tc = 0
0
HO
1]
T
=
cos 6
sin 6
-sin 6
cos 6
0
0
.. ...
.....
Thus, any coordinate in the actuator coordinate system (0,Actuator Depth), can be converted to
the blister coordinate system as follows:
Y = TIC * T, * (Actuator Depth
The (x,y) coordinates of the actuator center obtained using the above expression can be used to
calculate the total volume of fluid expelled.
4.3.4 Calculate the total volume offluid expelled up to the current step
ACTUATOR
BLIS7ERdV
=Common Area x dY
Figure 17: Discrete Volume Calculation
In this step, the volume of fluid expelled from the blister is calculated using the process of
numerical integration. As shown in Figure 17, the common volume between the blister and the
actuator is divided into discrete volumes and summed together to obtain the total volume. For
each volume slice, the common area between the two curves is determined and then multiplied by
the height of the volume slice.
The sequence of steps involved in the common volume calculation is shown in Figure 18.
Input Blister
and Actuator
DIMENSIONS
and
POSITIONS
Calculate BLISTER
RADIUS RI at the height
of the cross-section
Calculate ACTUATOR
RADIUS R2 at the height of
the cross-section
Calculate
COMMON
AREA using
only smaller
circle and
multiply by
dY to get dV
Calculate COMMON
AREA using circlecircle intersection
and multiply by dY to
get dV
Figure 18: Flowchart for Blister Volume Calculation
Provided the blister and actuator are present at a particular slice, the common area between the
two can be easily calculated by the procedure depicted below in Figure 19.
At a particular height, the intersection of
blister and actuator produces two
intersecting circles
The blister circle (in green) and the
actuator circle (in blue) intersect and the
common area represents the portion of
fluid expelled
The top view of the intersection shows
the common area (in yellow)
Figure 19: Intersection of Actuator and Blister at a particular height
There are 3 possible scenarios when the blister and actuator circles intersect:
1. The circles do not intersect
Figure 20(a) shows a situation wherein the two circles do not intersect. In this case, the common
area is zero and this volume slice does not contribute to the volume calculation.
iw - +m
_ _
Ar _
NMMMMMhF_
_::_:
RI +R2<d
RI+R2>d>R2-RI
d<R2-RI
Non- Intersecting Circles
(a)
Intersecting Circles
(b)
Circle within another circle
(c)
Figure 20: Possible Scenarios when a Blister and Actuator Intersect
2. The two circles intersect
Figure 20(b) shows a situation where the two circles intersect. The common area between the two
circles is calculated using a circle-circle intersection formula [26]
The horizontal distance between the points of intersection (P,Q) and the center of the smaller
circle 01 is denoted by 'x'.
d2
- R2
2
2d
+ R2
Key:
00,
RI
- Center-Center Distance, 'd'
- Radius of the Blister Circle
R2
- Radius of the Actuator Circle
Figure 21: Calculating the area of a Circle-Circle Intersection
The area of intersection between the two circles is obtained as the sum of the areas of the
asymmetric lenses (shown in blue and yellow in Figure 21) formed by the two circles.
Common Area = A1 + A2
where
d
2
A2 =dR2
cos-1(
-
x)
R2
x
-
(d-x) R2 2 - (d - x)2
3. One circle is entirely within another
Figure 20(c) depicts a situation wherein the smaller circle lies entirely within the larger. In this
case, the area of the smaller circle gives the common area between the actuator and blister at that
point.
This is calculated simply as:
Common Area= ;
R
4.3.5 Volume expelled in the current step
The volume calculated from the previous steps represents the crushed volume of the blister i.e.
the volume of fluid that has been expelled up to that point. From this step, the volume expelled
during any step can also be found simply by subtracting the total volume expelled up to the
current step (Figure 22).
Volume Expelled in Current Step
=
Total volume expelled up to current step
-
Total Volume Expelled
at Current Actuator Step
Total volume expelled up to previous step
Total Volume Expelled
at Previous Actuator Step
Volume Expelled
during the Current Step
Figure 22: Volume Expelled in the Current Step
4.3.6 Getting the 'instantaneous'flow rate
Once the volume expelled in a particular step is found, it is divided by the time taken by the
actuator to complete that step. This time depends on the position of the actuator and is calculated
so that an ideal actuator in contact with an ideal blister will produce constant flow.
ACTUATOR
Total Volume Expelled
(uL)
Crush
Depth
(mm)
BL ISTER
dH
Total Volume Expelled = f (Crush Depth)
Crush Depth
0 (mm)
dH - step size
dV - volume expelled in current step
Figure 23: Total Volume Expelled vs. Crush Depth
Figure 23 shows how the time taken for a given step is calculated from the ideal blister-actuator
interaction. For a particular step 'dH', the corresponding volume expelled is given by 'dV'. This
volume must be expelled in a certain period of time 'dt' such that the flow rate is a constant.
-,
V
dt
where V is the constant flow rate required
dt
=
dV
.
,
for that particular step dH corresponding to a particular crush depth 'H'
This value dt is determined for the entire range of movement of the actuator and plotted (Figure
24).
Using regression.
-t
dt=f (H)
Crush Depth (H)
Figure 24: Time taken for a Step versus the Crush Depth
A regression equation of dt vs crush depth is obtained from this graph and using this the time
taken for any step can be calculated.
Once the time dt is known, the instantaneous flow rate is calculated as:
InstantaneousFlow Rate =
Volume Expelled in CurrentStep (dV)
Time takenfor Step (dt)
4.3.7 Calculate the average, maximum and minimumflow rates
From the set of instantaneous flow rates obtained from the previous steps, the average as well as
extreme flow rates are determined. These metrics (as discussed in Section 4.2.1) are taken to be
representative of both the mean and non-constancy of the flow profile. These metrics once
calculated are the required outputs of the blister numerical model.
4.4 Assumptions
The following assumptions were made in the development of the blister flow rate model:
1.
The blister collapses regularly with no crumpling
This assumption greatly simplifies calculating the common volume between blister and
actuator. In situations where crumpling of the blister begins to occur, the uncertain nature of
crumpling leads to sudden increases in flow rate which are difficult to predict. It has been
shown experimentally (by Daktari) that the current blister and actuator shape do not cause
crumpling. However, this may not be the case for arbitrary shapes of blister and actuators. A
great deal of optimization may be required to arrive at a suitable configuration.
2.
There is no air in the blister
Air present in the blister tends to act like a damped spring (due to its viscosity and
compressibility). This could lead to large time constants before reaching stable flow. By
assuming the absence of air, these dynamic effect are taken to be absent and the liquid
responds instantaneously to changes in the velocity of the actuator.
3. Angular misalignments are measured about only a single axis.
This blister model makes the assumption that angular misalignment and lateral misalignment
occur in the same plane i.e. only 2d misalignments have been considered. While it is believed
that this is representative of the real system, a more accurate model would include another
angular misalignment in order to fully study the different modes of variation.
5. Validation of the Blister Model
Validation of the blister performance model developed in the previous section was attempted
using two setups: an optical setup for measuring the blister dimensions and an experimental setup
for measuring the flow output from the blisters. This data was correlated and compared to the
model predictions to determine the model accuracy.
5.1 Measurement Setup for Blister Dimensions
5.1.2 Selection of Hardware
Fixturing of a cartridge (containing a blister pack, see Figure 2) was accomplished by fixing the
plane of the cartridge on a base and thereafter locating using a 2-1 fixturing system. Figure 25
shows a schematic of the setup used. An interesting feature of this system is the ability to index
the 'blister locator'. This allows both top and side views of each blister to be photographed
without having to change the focus.
Top View
Side View
LiZUZ1
Blister
Locator
Top View
Side View
I-
0
Figure 25: Schematic of Blister & Camera Setup
The camera used for the photographs was a Fujifilm FinePix S700 with a Fujinon Zoom Lens (f=
6.3mm). Although the resolution of the camera was around 7.1 megapixels, the zoom lens
allowed a large portion of the image to be occupied by the blister increasing the number of pixels
devoted to it. Figure 26 is a photograph of the entire setup with camera and cartridge mounted.
Top View of the Setup
Thc blister locator is in position to
measure the side profile of the blisters
Front View of the Setup
The blister iocator is in position to
photograph the top view of the blisters
Figure 26: Photograph of Blister Measurement Setup
Calibration of the setup indicates that each pixel corresponds to a distance of 17.6 microns at the
focal plane. Using this setup highly repeatable photographs could be taken. Figure 27 shows some
examples.
Side -vicw of the blister pack showing
the height h)aand sphecmal raditus (r i
Iop iew of the bhter pack
shouing the base radius (R)
Figure 27: Photographs of the Blister Using the Current Setup
5.1.3 Selection of Software
Typically the software in a machine vision system, is expected to perform quick analysis of an
image and output the required dimensional information in a manufacturing line. However, for the
purposes of this project, time of measurement was not a significant constraint. Thus, instead of
using image processing algorithms to extract features from a captured image, it was decided to
manually count the number of pixels associated with each dimension. Although, this process is
time consuming and should be avoided for higher number of tests and higher repeatability, it has
been adopted in order to minimize the time required to setup the image processing algorithms. In
order to determine the repeatability of manual measurements, a gauge repeatability and
reproducibility (R&R) experiment was performed
5.1.3.1 Gauge Repeatability and Reproducibility
The repeatability of image manipulation and the entire measurement setup were measured in two
separate steps. For the repeatability of image manipulation, the same images of a blister were
measured 5 times by 2 operators. The results are shown in Figure 28 and Figure 29.
Blister Diameter from Top View
522
$21
520
519
518
517
Sib
* 521
£ 5-20
4
ft-i
$20
* 516
1
Operator No.
Figure 28: Blister diameter (in no. of pixels) measured by 2 operators
Blister Height from Side View
1713
172
170
169
168
161
166
---*IM
*
168
£170
---
1698
*18
Operator No.
Figure 29: Blister Height (in no. of pixels) measured by 2 operators
This overall standard deviation between the two operators was found to be 1.44 pixels which
translates into a repeatability coefficient of 4.3 pixels i.e. 75.68 pm. This was deemed acceptable
for the experiment.
5.2 Measurement Setup for Blister Flow
Blisters measured using the above setup were driven by an actuator in order to determine what the
flow profiles coming from them were like. This data was then used to correlate the measured
dimensions with the final flow rates.
The setup used for this purpose was a test system used by Daktari Diagnostics for testing the
working of their cartridges. This setup consisted of the actuators as well as the locating
mechanism for the cartridges. A Sensirion SLG1430-480 flow sensor was used to measure the
liquid flow rates from the blister.
5.3 Validation of Blister Numerical Model
In order to validate the model, the dimensions of a set of 4 blisters were measured using the
optical setup described in Section 5.1. Only the blister height and base radius were measured
from the side and top views of the blister. These dimensions were used as input for the blister
model, and the flow rates at specific crush depths was noted. These flow rates were then
compared with those obtained from experiment. Figure 30 summarizes the results.
. .
M
.
..
........................................
24
22
14
-
12
3.5
3.7
3.9
4.1
4.3
4.5
4.9
4.7
5.1
5.3
Crush Depth (mm)
3A - Actual Flow
3B - Actual Flow
3C- Actual Flow
-2B
- Actual Flow
3A - Simulated Flow
3B3 - Simulated Flow
"" 3C - Simulated Flow
""" 2B - Simulated Flow
Figure 30: Plot of Experimental and Predicted Flow Rates from 5 Blisters
.
The fit between the model and the experimental values is not satisfactory. There are several
possible reasons for this:
1. Uncertainty in known dimensions
The uncertainty in the known dimensions i.e. radius and height are high enough that it is
possible that wrong input was being provided to the model.
2. Lack of information about other relevant dimensions of the system
Data regarding the other inputs to the model was not available. In particular, the lateral
misalignment and starting height of the actuator were not completely known. In the
absence of this data the expected values for these dimensions were used in the blister
model. However, flow rate variation caused by these dimensions has not been modeled.
3.
Observed Lateral Misalignment
Significant lateral misalignment was observed in the test setup at the time of flow
measurement. However, in the absence of actual data this information could not be used.
4.
Crumpling in the blister
Some crumpling of the blister did occur during these trials, and this could have led to
some of the differences between the model and reality.
It is important that these effects are considered and the blister validation process repeated in order
to verify the claims that follow.
6. Monte Carlo Analysis and Regression Models
Despite the lack of a successful validation experiment (see Chapter 5), it was decided to use the
model in a statistical simulation to determine what the behavior of the entire population of blister
packs was likely to be (when manufacturing began and provided the model was correct). The
method used is commonly known as the Monte Carlo technique. It involves the creation of a
pseudo-population of blisters and actuators and then actually plunging these virtual actuators into
the virtual blisters to produce virtual flow! A distribution of the flow parameters was built by
running thousands of virtual experiments.
6.1 Manufacturing Variation Data
The pseudo-population of blisters and actuators is built using data that informs us about their
statistical distribution and parameters. Table 2 shows the manufacturing variation data for the
various dimensions (see Section 4.2.1).
Table 4: Variation Data for the Blister and Actuator Dimensions
Standard Deviation
Mean Value
Distribution
Dimension
Base Radius
Normal
7.99 mm
80 pLm
Spherical Radius
Normal
6.2 mm
80 tm
Blister Height
Normal
6.16 mm
35 tm
Actuator Radius
Normal
7.27 mm
33 pm
Lateral Misalignment
Normal
0 mm
142 jim
Angular Misalignment
Normal
0 degrees
0.5 degree
Height of the Actuator
Uniform
13.43 mm
486 pm
This variation data has been obtained from a variety of sources. The base radius, spherical radius
and blister height are obtained from a combination of manufacturer data and the validation data
from Chapter 5. The actuator radius data was selected based on a standard deviation that would
provide 99.7% of produced parts conforming to the DIN 2768-1 specification. The lateral
misalignment, angular misalignment and height of the actuator are obtained from the analysis of
the instrument by Linares Error! Reference source not found.
6.2 Monte Carlo Algorithm
Following the generation of pseudo-population data, the algorithm consisted of using the blister
numerical model developed in Chapter 4 for plunging the blisters and determining the flow rates
from each setup. The algorithm is summarized below in Figure 31.
START
Generate a random blister
and actuator using the
population parameters for
each
Input NUMBER OF
TRIALS, N
Use the blister numerical
model to calculate
AVERAGE, MAXIMUM
AND MINIMUM FLOW
RATES
Input Blister and
Actuator Population
Parameters
Set Counter = I
No
Yes
Counter <= N?
Store the average,
maximum and minimum
flow rates in suitable
vectors
Counter = Counter + I
Display a histogram of the
stored flow rate data
Determine appropriate statistics
from the above simulations
STOP
Figure 31: Flowchart of the Monte Carlo Algorithm
Several different experiments were run using the above Monte Carlo simulation and their results
are summarized in Chapter 7.
7. Results and Discussion
Using the Monte Carlo algorithm described in the previous chapter, a simulation of 10,000
blisters was conducted to study the effect of variation on the flow rate. Based on the requirements
set forth by Daktari, the tolerance on the flow rate was set at +/- 20% of the mean flow rate. Any
blister-actuator configurations that caused a flow rate outside this range were deemed 'out-ofspecification'. For example, for a nominal flow rate of 10ptL/min, the flow would be considered
within spec if it were between 8piL/min and 12 pL/min.
7.1 Flow Rate Variation after considering only Blister Dimensional
Variation
To begin with, the robustness of the blister design with respect to an ideal actuator was studied.
This involved allowing the 3 blister dimensions, namely, base radius, spherical radius and blister
height to be randomly picked from suitable normal populations (see Table 4) while the actuator
dimensions remained constant at their mean values. Figure 32 shows the distribution of flow rates
for this situation. The three distributions capture the important elements of the overall flow rate
profile shown in Figure 10.
Table 5: Summary of Output Distribution Properties considering the variation in blister
dimensions alone
Average Flow Rate
Maximum Flow Rate
Minimum Flow Rate
Mean
20.0041
20.0896
19.9166
Standard Deviation
0.2293
0.2404
0.2369
Skewness
0.0333
0.4955
-0.4477
Coefficient of Kurtosis
2.9592
3.3527
3.2543
Lilliefor's Test for
> 0.5
< 0.001
< 0.001
Normality (p-value)
400
Frequency Dsrbution of Average FlowRat
300
100
r
Figure 32: Distribution of Flow Rates considering only Blister Variation
The distribution of average flow rate looks quite normal. The skewness, co-efficient of kurtosis
and Lilliefor's test agree with this hypothesis (see Table 5). The distributions of maximum and
minimum flow rates look like right- and left- skewed normal distributions. During the above
simulation, no out-of spec parts were found. This seems to indicate that the interaction is robust
with >99.99% conforming parts.
This simulation is useful because it provides a lower bound on the capability of the blisteractuator manufacturing process. If the number of non-conforming parts was unacceptably high, it
would have been impossible to improve manufacturing outcomes without adjusting the blister
forming process itself. However, for current applications, the forming process provides a robust
output and so it can be accepted.
Using the above data, it is possible to show that the blisters can provide a satisfactory quality
(assumed to be 3a i.e. 99.7% conforming parts) for a tolerance range as tight as ± 5%. However,
as flow rate tolerance requirements get tighter beyond this number, further control of the blister
manufacturing process is necessary. This may be in the form of greater process control, leading to
less variation in blister dimensions, or it could be in the form of 100% inspection, which would
provide a similar result but with greater yield loss.
This data is summarized in Table 6. An interesting point concerns the process capability index
Cp. For a centered process,
CP =USL - LSL
6u
where a is the estimate of the standard deviation for an approximately normal
distribution. In order to satisfy that normality requirement, the average flow rate from the blister
has been used to compute the C, values. It is interesting to note that nearly 6c capability is easily
possible based on the average flow rate alone (C, = 1.45 for L 5%). However, in the current
system, the maximum and minimum flow rates are assumed to play a critical role. If the tolerance
requirement is placed only on average flow rate or some kind of external mechanism could be
introduced into the microfluidic chip that would dampen out the fluctuations in fluid flow, it may
be possible to get much higher capabilities using the existing process.
Table 6: Increase in Percentage of Non-conforming Blisters with tighter tolerance ranges
Required Flow Rate Tolerance
i 20 %
i 10 %
± 5%
± 2.5 %
±1 %
Percentage of Non-Conforming Parts
~0%
~0%
0.14%
11.14%
58.59%
Process Capability Index (Cp)
5.81
2.91
1.45
0.73
0.29
7.2 Flow Rate Variation after considering the variation in all dimensions
The entire system including actuator variations may be simulated to obtain a better understanding
of the system. Figure 33 shows the distribution of flow rates for this situation.
Frequency Distbtlon of Averge Fow Rates (pirnin)
Figure 33: Distribution of Flow Rates considering variation in all dimensions
It can be seen that the addition of other sources of variation (due to the actuator and the assembly
process) has dramatically increased the range of flow rates. The range of flow rates has increased
to between 6 and 30 pL/min. The number of out-of-spec parts in this run of 10,000 blisters is
2438 i.e. 24.38% of the parts! This is certainly an unacceptable scenario.
Table 7 shows a summary of the distributions' parameters.
Table 7: Summary of Output Distribution Properties considering the variation in all
relevant dimensions
Average Flow Rate
Maximum Flow Rate
Minimum Flow Rate
Mean
19.9837
20.7378
19.1504
Standard Deviation
2.2246
2.5407
2.6435
Skewness
-0.0546
0.7708
-0.9171
Coefficient of Kurtosis
3.0195
3.3349
3.7907
>0.5
< 0.001
< 0.001
Lilliefor's Test for
Normality (p-value)
In this case, with no further intervention the tolerance limits on flow rates that are possible are:
Table 8: Increase in Percentage of Non-conforming Blister-Actuator Systems with tighter
tolerance ranges
Required Flow Rate Tolerance
± 20 %
± 10 %
± 5%
± 2.5 %
±1 %
Percentage of Non-Conforming Parts
25.15%
57.11%
77.91%
89.48%
97.86%
Since, this kind of performance is not acceptable (even for the current tolerance of ± 20%),
further study was done to determine the parameters that critically affect the flow rate.
7.3 Regression on the Average Flow Rate
Using the data from the previous simulation, a regression equation for the average flow rate from
a blister-actuator combination was extracted. A first-order regression with only main effects and
no interaction effects has been found to be suitable to 0.6% accuracy. Table 9 shows the
coefficients of the corresponding terms.
Table 9: List of Coefficients for Linear Regression on Average Flow Rate
Normalized Dimension
Coefficients
Percentage Contribution
Base Radius, R
0.0228
1%
Spherical Radius, r
0.1644
6%
Blister Height, h
0.1494
5%
Actuator Radius, Ra
0.1923
7%
Lateral Misalignment, im
-0.0004
0%
Angular Misalignment, am
0.0006
0%
Starting Height, Ho
-2.1907
81%
Table 9 shows the parameters that had a significant effect on the blister variation. They are
highlighted: spherical radius (r), blister height (h), actuator radius (Ra) and starting height of the
actuator (Ho).
The final regression equation is for average flow rate is:
Average Flow Rate = 19.9703+ 0.1643 r -Mp' + 0.1496
(
(Oh
r
2
+0.1923 (Ra -1Ra
\aRa
/
HO - pH
aH
)
7.4 Regression on the Range of Flow Rates
Here, the range of flow rates refers to the difference between the maximum and minimum flow
rate for each blister-actuator combination. The coefficients for a first-order regression equation on
the range using only main effects and no interaction effects is shown in Table 10.
Table 10: List of Coefficients for Linear Regression on Range of Flow Rates
Normalized Dimension
Coefficients
Percentage Contribution
Base Radius, R
Spherical Radius, r
Blister Height, h
Actuator Radius, Ra
Lateral Misalignment, lm
Angular Misalignment, am
Starting Height, Ho
0.0114
0.0441
0.0061
0.0057
0.0113
0.0079
0.0822
7%
26%
4%
3%
7%
5%
49%
This regression model indicates that the spherical radius and starting height have the largest effect
on the range of flow rate. However, the other dimensions also have appreciable effects on the
range of flow rates.
7.5 Effect of Variation in Individual Dimensions on Flow Rate
In order to further understand the errors in a given blister-actuator configuration, the effect of
each individual error has been studied. Each graph in this section has been plotted for the 2 sigma
boundaries of the individual variables i.e. jt+2a and p-2a. The results are presented as follows:
7.5.2 Effect of Spherical Radius Variation
Variations in spherical radius lead to the top sphere being either larger or smaller than ideal. We
would expect this to affect the flow rate near the beginning of the actuator's movement. This is
indeed the case as shown in Figure 34 and Figure 35. The flow rate starts off away from the ideal
rate of 20 pL/min and slowly converges towards the final rate. The two step changes appear to
take place near where the spherical and conical parts of the blister join together. The average flow
rate is approximately 2% different from the ideal flow rate and the range is small.
21
-
S20.5
~20
a
19.5
0
19.I
2.5
3
3.5
4
4.5
5
Crush Depth (mm)
Figure 34: Flow Rate Profile with a Smaller Spherical Radius
5.5
21
T!20.5
a 20
49
M 19.5
a: 0
19
2.5
3
3.5
4
4.5
Crush Dpth (mm)
5
5.5
Figure 35: Flow Rate Profile with a Larger Spherical Radius
7.5.3 Effect of Blister Height Variation
When blister height changes without alteration in the other dimensions, the shape of the blister
changes such that the cross-sectional areas are either always higher or lower than ideal. This
results in a flow that starts off lower or higher and slowly but smoothly converges towards the
ideal rate (Figure 36 and Figure 37). The average flow rate is approximately 1% different from
ideal. The range of flow rates is also small.
21
20.5
_4
20
S19.5
0
2.5
3
3.5
4
4.5
5
Crush Dp (mm)
Figure 36: Flow Rate Profile with a Smaller Blister Height
5.5
Figure 37: Flow Rate Profile with a Larger Blister Height
7.5.4 Effect of Actuator Radius Variation
Changes in the radius of the actuator result in changes with the point at which flow begins. Thus,
a larger actuator starts flow earlier than expected and leads to higher flows at every depth due to
the larger intersecting area. Thus, overall shifts in the mean flow from ideal seem to indicate
actuator radius variation. This is shown in Figure 38 and Figure 39. The mean flow rate is
approximately 2% different from the ideal flow rate and the range of flow rates is still small.
I
I
I
I
I
Figure 38: Flow Rate Profile with a Smaller Actuator Radius
20.5
20 19.5 0
2.5
3
4
3.5
4.5
5
5.5
Crush Dept (MM)
Figure 39:Flow Rate Profile with a Larger Actuator Radius
7.5.5 Effect of Starting Height Variation
Variations in starting height affect the speed at which the actuator moves through the blister. If
the actuator starts at a higher than ideal location, then the speed profile will be slower than the
ideal flow rate and vice versa if the actuator starts off at a lower position. This change is however
quite dramatic. Figure 40 and Figure 41 show large changes in flow rate. The mean flow rate is
approximately 20% different from the ideal value and the range of flows is also quite large
(approximately 4 pL/min).
~25
1-6
a0
2.5
3
3.5
4
4.5
5
Crush Dep (MM)
Figure 40: Flow Rate Profile with Lower Actuator Starting Height
5.
.
Figure 41: Flow Rate Profile with Higher Actuator Starting Height
7.6 Flow Rate Variation after consideringthe effect of shimming
Based on the analysis in section 7.5, it can be seen that the most critical parameter affecting flow
rate is the starting height of the actuator tip. Having understood this, Daktari's current design
already incorporates the reduction of instrument variation in one important way - shimming the
actuator in the direction of motion to correct for assembly variations. This reduces the variance in
the dimensions to less than the size of the shim.
Interestingly, the use of shims also changes the distribution of the actuator height variation from
normal to uniform[ 14]. Using these changed numbers in the simulation the results shown in
Figure 42 and Table 11 are obtained:
Table 11: Summary of Output Distribution properties considering the variation in al
relevant dimensions
Minimum Flow Rate
Maximum Flow Rate
Average Flow Rate
Mean
19.9996
20.1199
19.8155
Standard Deviation
0.2981
0.3226
0.3150
Skewness
0.0159
0.4457
-0.3699
Coefficient of Kurtosis
3.0098
3.1973
3.1528
> 0.5
< 0.001
< 0.001
Lilliefor's Test for
Normality (p-value)
. . .....
Figure 42: Distribution of Flow Rates considering the effect of shimming
The distributions of flow rate show a distinct decrease in variation due to the increased control
over the initial height of the actuator. During this simulation, no out-of-spec parts were produced
for the run of 5000. The number of non-conforming parts for this situation is:
Table 12: Percentage of Non-conforming Blister-Actuator Systems after shimming
Required Flow Rate Tolerance
± 20 % ± 10 %
± 5%
± 2.5 %
±1 %
Percentage of Non-Conforming Parts
< 2.12 %
< 2.12%
2.12%
28.46%
81.66%
8. Conclusions and Recommendations
In conclusion, based on the current requirements, the blister design has been found to be robust to
manufacturing variations. The blister pack should be capable of providing a controlled flow rate
of L 20% satisfactorily with less than 2.12% of the blister-actuator pairs failing to meet this spec
(although more number of simulations may indicate that this number is lower).
However, future diagnostic products may require tighter tolerances on the flow rate. In that
situation, it may become necessary for Daktari to better control the following critical parameters:
* Actuator radius and starting height: Further control over these two parameters would enable
flow rate tolerances as small as +/- 5% to be achieved
- Blister height and spherical radius: As tolerance requirements become approach +/- 2.5%, the
number of non-conforming parts quickly begins to escalate (see Table 6). At this point, it will
become necessary to reduce manufacturing variation in the blister height and spherical radius.
This could involve greater investments in the blister manufacturing process which would
improve the process capability index values (Cp) listed in Table 6.
76
9. Future Work
9.1 Blister Model Validation
Although a Monte Carlo simulation was run and the results and conclusions of that experiment
were presented, it is still necessary to validate the underlying model. A more accurate and precise
measuring system should be designed and used with a more repeatable flow sensor. Such a
validation study could be an extension of the work done in Chapter 5.
9.2 Study of Dimensional Variation in Blisters
The validity of the Monte Carlo results depends on the assumption of independence and
normality of the blisters' dimensions. This hypothesis must be verified to be true by measuring
and analyzing the dimensions of a large sample (usually n > 30) of blisters. Since, a common
forming tool is used for making the blisters, it is possible that there is some correlation between
the dimensions and the effect of this should be included in future analysis if that were the case.
Also, the normality assumption, while true for most cases, must be verified.
9.3 Increasing the Number of Runs in the Monte Carlo Simulation
Due to the time-consuming nature of the Monte Carlo analysis a limited run of 10,000 blisters
was studied in order to estimate the parameters of the population of blister-atuators. However, a
better understanding of the population can be had by running the simulations a greater number of
times.
9.4 Electrode Foils - Configuration Study and Process Analysis
Preliminary studies indicate that the presence of manufacturing defects on the electrodes does
affect repeatability and, hence, further study and optimization of the process is deemed necessary.
One possible strategy involves determining the effect of the defects and using this information to
optimize the final process. Another approach (that is more aligned with the process of
development) is to directly begin searching for alternate manufacturing processes that could
eliminate most, if not all, defects. If such a process were found, then experiments should be
performed to determine if repeatability is achieved. For example, it is believed that the use of an
'adhesion' layer could dramatically reduce the number of manufacturing defects.
Another useful exercise would be the design optimization of the electrode configuration (size,
shape and spacing of electrodes). It may be possible to optimize these parameters to produce a
more economical (less metallic material) and more robust design.
9.5 Functionalization Process Optimization
As seen in Section 2.3.1 .b, the process of depositing antibody on the electrode foil requires
attention to correct for improper coating. Various manufacturing processes (such as micro-contact
printing, masking, spray deposition) need to be explored to determine their capabilities. Finally, a
process can be selected and its parameters optimized for Daktari's specific requirements.
As mass production begins, the time taken for the functionalization process needs to be
optimized. It is currently perceived that this step will have the second longest processing time
after the injection molding process. A considerable reduction in processing time would lower
inventory levels at this step.
9.6 Injection Molding of the Backbone - Normalization Time Optimization
The actual time required for normalization of the injection molded parts must be studied
experimentally and this information needs to be used to optimize the process. Also, the tolerances
on the critical dimensions of the cartridge could be studied to determine if they can be widened
without sacrificing product performance- this would directly lead to a decrease in normalization
time.
9.7 Valve-Solenoid Interaction Robustness Study
Currently, the actual sensitivity of the valve-solenoids interaction to misalignments is not
precisely known. Experiments to determine this sensitivity should be performed. This information
can then be combined with the tolerance analysis of the valve-solenoid DFC performed by
Linares[14] to confirm whether the interaction is robust or further design changes are required.
9.8 Effect of Imprecise Actuator Movement
The actuators that are used currently to push the blisters are quite precise. The effect of less
precise actuators (larger step size) on the flow rate performance of the blisters could be studied. If
satisfactory, these larger-step-size actuators would lead to significant decreases in product cost.
Unfortunately, large actuator steps tend to lead to high changes in flow rate (although the average
flow rate would be the same). However it may be possible to introduce a certain amount of
capacitance into the system (either in the actuator or in the blister) to smoothen the flow.
80
References
[1]
Korb, S.N., 2004, "Towards the Manufacturing of Microfluidic Devices : Fluid Flow
in Multilayer Devices as a Test Case", S.M. Thesis, Massachusetts Institute of
Technology, Cambridge MA.
[2]
Linder, V., 2007 "Microfluidics at the crossroads of diagnostics", The Analyst,
2007, 132, pp. 1186-1192.
[3]
Janossy, G., Mandy, F., O'Gorman, M., 2008, "Diagnostics in the Shadow of HIV
Epidemics", Cytometry Part B, 74B, (Suppl. 1) ,pp. 1-3, 2008.
[4]
World Health Organization, "Towards universal access: scaling up priority
HIV/AIDS interventions in the health sector: progress report 2009" , 2009
[5]
World Health Organization,
http://www.who.int/mediacentre/factsheets/fs]04/en/index.html,accessed July 25,
2010.
[6]
Yager, P., Domingo, G., Gerdes, J., 2008, "Point-of-Care Diagnostics for Global
Health", Annu. Rev. Biomed. Eng. 2008, 10:107-44.
[7]
Mandy, F., Janossy, G. , Pilon, R., Faucher, S., "Affordable CD4 T-Cell
Enumeration for Resource-Limited Regions: A Status Report for 2008. Cytometry
Part B 2008; 74B (Suppl. 1): S27-S39, 2008.
[8]
Peter, T., Badrichani, A., Wu, E., Freeman, R., Ncube B, Ariki, F., Daily, J.,
Shimada, Y., Murtagh, M., 2008, "Challenges in implementing CD4 testing in
resource-limited settings", Cytometry Part B 2008; 74B (Suppl. 1):S123-S130.
[9]
Katoh, T., Tokuno, R., Zhang, Y., 2008, "Micro injection molding for mass
production using LIGA mold inserts", Microsystems Technology, 14:1507-1514.
[10]
Liu, J., Qiao, H., Liu, C., Xu, Z., 2009, "Plasma assisted thermal bonding for
PMMA microfluidic chips with integrated metal microelectrodes", Sensors and
Actuators B 141, pp. 646-65 1.
[11]
Ahn, C., Choi, J., Beaucage, G., 2004, "Disposable Smart Lab on a Chip for Pointof-Care Clinical Diagnostics", Proceeding of the IEEE, Vol., 92, No. 1,
[12]
Hale, M., 2009, "Development of a Low-Cost, Rapid-Cycle Hot Embossing System
for Microscale Parts", Department of Mechanical Engineering, Massachusetts
Institute of Technology, June 2009.
[13]
Attia, M., Marson, S., Alcock, J., 2009, "Micro-Injection molding of polymer
microfluidic devices", Microfluid Nanofluid 7, pp 1-28.
[14]
Linares, R., 2010 " Manufacturability of Lab on a Chip Devices: Tolerance Analysis
and Requirements Establishment", M.Eng. Thesis, Massachusetts Institute of
Technology, Cambridge, MA.
[15]
Chung, X., Liu, Y., Irimia, D., Dixon, M., Demirci, U., Yang, L., Zamir, L.,
Tompkins, R., Rodriguez, W., Toner, M., Bashir, R., 2007, "Cell detection and
counting trough cell lysate impedance spectroscopy in microfluidic devices", Lab
Chip, 2007, 7, 746-755.
[16]
Chung, X., Irimia, D., Dixon, M., Sekine, K., Demirci, U., Zamir, L., Tompkins, R.,
Rodriguez, W., Toner, M., 2006 "A microfluidic device for practical label-free
CD4+ T cell counting of HIV-infected subjects", Lab Chip, 2007, 7, 170-178.
[17]
Chung, X., Irimia, D., Dixon, M., Ziperstein, J., Demirci, U., Zamir, L., Tompkins,
R., Toner, M., Rodriguez, W., 2007, "A Microchip Approach for Practical LabelFree CD4+ T-Cell Counting of HIV-Infected Subjects in Resource-Poor Settings"
Journal of Acquired Immune Deficiency Syndrome, Volume 45, Number 3, July 1,
2007, pp 251-261.
[18]
Nguyen, N.-T., S. T. Wereley, "Fundamentals and Applications of Microfluidics",
Boston, MA, Artech House, 2002.
[19]
Pranov, H., Koblitz, H., 2006, "On the Injection Molding of Nanostructured
Polymer Surfaces", Polymer Engineering and Science, Feb 2006, 46, 2, Science
Module pg. 46.
[20]
Deshpande, S., 1996, "Enzyme Immunoassays: From Concept to Product
Development", Chapman & Hall, Chapter 7, pp 216 - 223.
[21]
Mooney, C. Z., 1997, Monte Carlo Simulation, Sage Publications, Thousand Oaks,
California, US, Chap. 1.
[22]
Breedis, J. B., 2001, "Monte Carlo Analysis of a Passively Aligned Silicon
Waferboard Package", 2001 Electronic Components and Technology Conference.
[23]
Lin, C., 1987, "A Statistical Analysis Tool for Variation Simulation Modeling",
Computers Ind. Enggn, 13(1-4), pp. 386-391.
[24]
Hu, M., Lin, Z., Lai, X., Ni, J., 2001, "Simulation and analysis of assembly
processes considering compliant, non-ideal parts and tooling variations", Intl Journal
of Machine Tools & Manufacture, 41, 2233-2243.
[25]
Yu, M., Du, R., 2005, "Sensitivity Analysis of the Sheet Metal Stamping Processes
based on Inverse Finite Element Modeling and Monte Carlo Simulation", AIP Conf.
Proc. 778, pp. 813-818.
[26]
Wolfram Mathworld, http://mathworld.wolfram.com/Circle-CircleIntersection.html,
accessed August 02, 2010.
[27]
Hornberg, A., 2006, Handbook of Machine Vision, Wiley-VCH, Weinheim,
Germany.
[28]
Janossy, G., Mandy, F., O'Gorman, M., 2008, "Diagnostics in the Shadow of HIV
Epidemics", Cytometry Part B, 74B, (Suppl. 1) ,pp. 1-3, 2008.

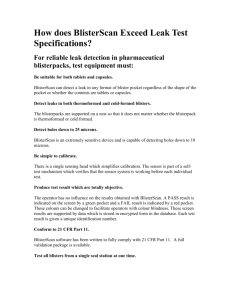
![First Aid Training : Bronze [Power Point]](http://s2.studylib.net/store/data/005424634_1-e0b0e5e602f7c1666ebc2e9ff3f4a1b5-300x300.png)
