24 Bulletin of TICMI Tengiz Meunargia I. Vekua Institute of Applied Mathematics
advertisement

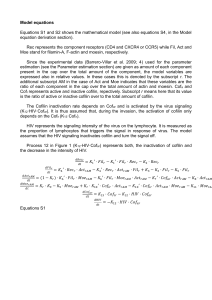
24 Bulletin of TICMI ON SOME REFINED THEORIES OF PLATES AND SHELLS Tengiz Meunargia I. Vekua Institute of Applied Mathematics of Iv. Javakhishvili Tbilisi State University Abstract. In this paper we consider Reissner-Mindlin’s type linear theory and I. Vekua’s refined linear theory for plates, as well as, Koiter-Naghdi’s and I. Vekua’s refined nonlinear theories for non-shallow shells. We also consider Kirsch’s well-known problem for plates [1]. Key words and phrases: Non-shallow shells, metric tensor and tensor of curvature, midsurface of the shell. AMS subject classification 2010: 74K25; 74B20. 1. A complete system of equilibrium equation and the stress-strain relations of the three-dimensional (3D) nonlinear theory of elasticity can be written as: ˆ i σ i + Φ = 0, ∇ (1) σ i = E ijpq epq (Rj + ∂j u) (i, j, p, q = 1, 2, 3), ˆ i are covariant derivatives relative to the space curvilinear coordinates where ∇ i i x ; σ and Φ are, respectively, the contravariant ”constituents” of the stress vector and an external force, eij are covariant components of the strain tensor, u is the displacement vector, E 2eij ijpq = Ri ∂j u + Rj ∂i u + ∂i u∂j u, = λg ij g pq + µ(g ip g jq + g iq g jp ) (g ij = Ri Rj ), (2) λ and µ are Lame’s constants, Ri and Ri are covariant and contravariant basis vectors of the surface Ŝ(x3 = const) of the 3D domain Ω, which are connected with the basis vectors ri and ri of the midsurface S (x3 = 0) by the following relations: Ri = A.ji. rj , Ri = Ai..j rj (i, j = 1, 2, 3), R3 = R3 = r 3 = r 3 = n, β β A.β α. = aα − x3 bα , i. A.3 i. = A.3 = δi3 , −1 α α α Aα. .β = ϑ [aβ + x3 (bβ − 2Haβ )], (3) ϑ = 1 − 2Hx3 + Kx23 , where aβα (aαβ , aαβ ) and bβα (bαβ , bαβ ) are mixed (covariant, contravariant) components of the metric tensor and tensor of curvature of the midsurface S (x3 = 0), x3 = x3 is the the thickness coordinate and h is the semi-thickness of the shell Ω, H and K are middle and Gaussian curvatures of the midsurface S (x3 = 0), g and a are discriminants of metric tensor of the the surfaces Ŝ and S. Volume 14, 2010 25 Shallow and Non-Shallow Shells. The main quadratic forms of the surface S (x3 = 0) and the surface Ŝ (x3 = const) have the form: I = ds2 = aαβ dxα dxβ , II = ks ds2 = bαβ dxα dxβ , S (x3 = 0), I = dŝ2 = gαβ dxα dxβ , II = k̂ŝ dŝ2 = b̂αβ dxα dxβ , Ŝ (x3 = const), (4) where ks and k̂ŝ are the normal curvatures of the surfaces S and Ŝ: aαβ = r α r β , bαβ dxα = −r α nβ , ks = bαβ s s , s = , S (x3 = 0), ds α β α (5) gαβ = Rα Rβ = aαβ − 2x3 bαβ + x23 bαγ bγβ , b̂αβ = (1 − 2Hx3 )bαβ + x3 Kaαβ , Ŝ (x3 = const). The unit vectors of the tangent ŝ and tangential normal l̂ are expressed by the following formulas: ŝ = [(1 − x3 ks )s − x3 τs l] √ dŝ = ds ds , l̂ = [(1 − x3 ks )l − x3 τs s] , dŝ dŝ (6) 1 − 2x3 ks + x23 (ks2 + τs2 )ds, where s and l are the the tangent and tangential normal on the midsurface S, ds and dŝ are the linear elements of the surfaces S and Ŝ, and τs is the geodesic torsion of the surface S. Under shallow shells we mean 3D shell-type elastic bodies satisfying the conditions aβα − x3 bβα ∼ = aβα , ⇒ Rα ∼ = r α , Rα ∼ = r α , gαβ ∼ = aαβ , b̂αβ ∼ = bαβ , (7) i.e., in this case the interior geometry of the shell does not vary in thickness and therefore such kind of shells are usually called the shells with non-varying geometry. For non-shallow shells in the case of Koiter-Mindlin’s theory we have Rα = (aβα − x3 bβα )r β , Rα = (aβα + x3 bβα )r β , R3 = n, ⇒ gαβ ∼ = aαβ − 2x3 bαβ , g αβ ∼ = aαβ + 2x3 bαβ , (8) i.e., in this case only the linear part with respect to x3 is retained. In the sequel, by non-shallow shells we mean 3D shell-type elastic bodies satisfying the relations (3), (4), (5), (6). To reduce the 3D problems of the theory of elasticity to 2D ones, it is necessary to rewrite the relations (3)-(6) in forms of the bases of the midsurface S (x3 = 0). The relation (1) can be written as [2]: ∇α (ϑσ α ) + ∂3 (ϑσ 3 ) + ϑΦ = 0, (9) 26 Bulletin of TICMI 1 σ i = M i1 j1 p1 q1 Aii1 (App1 r q1 ∂p U + Aqq1 r p1 ∂q U + App1 Aqq1 ∂p U ∂q U )r j1 , 2 where ∇α are covariant derivatives on the midsurface S, (10) M i1 j1 p1 q1 = λai1 j1 ap1 q1 + µ(ai1 p1 aj1 q1 + ai1 q1 aj1 p1 ) (aij = r i r j ). (11) 2. In the present paper we use I. Vekua’s reduction method for the nonlinear theory of non-shallow shells (I. Vekua used the method for linear theory of shallow shells) the essence of which consists, without going into detals, in the following: since the system of Legendre polynomials Pn ( xh3 ) is complete in the interval [−h, h], for equation (9) the equivalent infinite system of 2D equations is obtained as ( ) (m) (m) α 2m + 1 (m−1) 3 (m−3) 3 ∇α σ − σ + σ + ... + F = 0, (12) h where ( ) (m) i (m) σ ,Φ (m) (m) 2m + 1 F = Φ+ 2h ( 2m + 1 = 2h (+) (+) ϑ σ 3 −(−1) ∫h ( ) ( ) ϑσ i , ϑΦ Pm xh̄3 dx3 , −h m (−) (−) ) ϑ σ3 ( (±) ) ϑ = 1 ± 2hH + Kh 2 . Thus we have obtained the infinite system of 2D equations (12), for which (±) the boundary conditions of the face surfaces (x3 = ±h) are satisfied, i.e. σ 3 = σ 3 (x1 , x2 , ±h) is the preassigned vector field and is contained in the equilibrium equations. The equations (10) may be written as: ∫h (x ) 2m + 1 3 i σ = ϑσ Pm dx3 2h h [ −h∞ ( ) (m1 ) (m) (m1 ) ∑ (m) i p iq 1 i1 j1 p1 q1 = 2M A i1 p1 r q1 ·Dp U + A i1 q1r p1 ·Dq U r j1. (m1 ) m1 =0 (m1 ) [( ) (m ) (m1 ) (m1 ) ∞ 2 (m) (m) ∑ ijp ijq + A i1 j1 p1 r q1 ·Dp U + A i1 j1 q1r p1 ·Dq U Dj U (m1 ,m2 ) m1 ,m2 =0 ( ) ] (m1 ,m2 ) (m1 ) (m1 ) (m) + A ii1pp1qq1 Dp U ·Dq U r j1 (m1 ,m2 ) ( (m ) ) (m ) ] (m2 ) ∞ 1 3 (m) ∑ ij pq + A i1 j1 p1 q1 Dp U ·Dq U Dj U , (m) i (13) m1 ,m2 ,m3 =0 (m1 ,m2 ,m3 ) where (m) Di U = δiβ ∂β (m) U +δi3 (m) (m) 2m + 1 U ; U = h ′ ′ ((m+1) (m+3) ) U + U +... , (14) Volume 14, 2010 (m) A (m1 ) (m) ijp i1 j1 p1 (m1 ,m2 ) A ij i1 j1 2m + 1 = 2h 2m + 1 = 2h ϑAii1 Ajj1 Pm1 ϑAii1 Ajj1 App1 Pm1 = h 3 Pm h 3 (x ) h (x ) 3 Pm2 h Pm dx3 , (x ) 3 h dx3 , (15) 2m + 1 2h ∫h × 3 (x ) −h ijpq i1 j1 p1 q1 (m1 ,m2 ,m3 ) (x ) −h ∫h (m) A ∫h 27 ϑAii1 Ajj1 App1 Aqq1 Pm1 −h (x ) 3 h Pm2 (x ) 3 h Pm3 (x ) 3 h Pm (x ) 3 h dx3 . The boundary conditions on the lateral contour take the form: a) for the stresses σ 2m + 1 = σ (ll) l + σ (ls) s + σ (ln) n = 2h (l) (m) (m) (m) (m) ∫h σ (l) (x ) dŝ 3 dx3 , Pm ds h (16) h b) for the displacements 2m + 1 U = U (l) l + U (s) s + U 3 n = 2h m (m) (m) (m) ∫h U Pm (x ) 3 h dx3 . (17) h The passage to finite systems can be realized by various methods one of which consists in considering of a finite series, i.e. ) N ( (x ) ∑ (m) i (m) (m) 3 (ϑσ , U , ϑΦ) = σ , U , Φ Pm , h m=0 i where N is a fixed nonnegative number. In other words, it is assumed that (m) (m) U = 0, σ i = 0 if m > N. This approximation will be called the N th order approximation. The integrals of type (15) can be calculated; for example, (m) A (m1 ) αβ α1 β1 2m + 1 = 2h ∫h ϑ −h −1 Bαα1 (x3 )Bββ1 (x3 )Pm1 (x ) 3 h Pm (x ) 3 h dx3 28 Bulletin of TICMI = ( [ )]y2 α β Lα L Pm1 (y)Qm (y), m1 ≤ m β α m Bα1 (hy)Bβ1 (hy) + 1K β1 σm 1 Qm1 (y)Pm (y), m1 ≤ m y1 for E ̸= 0, K ̸= 0, 2m+1 √ 2 Eh (18) for E = H 2 − K, m aα11 aββ1 δm 1 where Qm (y) is the Legendre function of the second kind, E is the Euler difference, Bβα (x) = Bβα = aαβ + xLαβ , Lαβ = bαβ − 2Haαβ . Under the square brackets we mean the following: √ [f (y)]yy21 = f (y2 ) − f (y1 ), y1,2 = [(H ∓ E)h]−1 . Note that for Koiter-Naghdi’s non-shallow shells the following expression (m) A (m1 ) ( β m β α α β ∼ +h(a b +a b ) = aαα1 aβ1 δm α1 β1 β 1 α1 1 αβ α1 β1 m+1 m ) m m δm + δ (19) 2m − 1 1 −1 2m + 3 m1 +1 is obtained. For the integrals containing the product of three Legendre polynomials Pm = Pm ( xh3 ) we have (m) A (m1 ,m2 ) ∑ α1 α2 α3 β1 β2 β3 r=0 ∫h ϑ−2 Bβα11 Bβα2 Bβα3 Pm1 Pm2 Pm dx3 = −h 2m + 1 K 2 h4 [ ( )]y2 2 n P (y)Q (y), s ≤ m s m ∂ y α α α n γm1 m2 r , Cβ11β22β33 h ∂y ∂y y − y Q (y)P (y), s ≥ m 1 2 1 2 s m n=0 y min(m1 ,m2 ) × 2m + 1 = 2n 3 ∑ n 1 where s = m1 + m2 − 2r, γpqr = Ap−r Ar Aq−r 2(p + q) − 4r + 1 1 · 3 · · · 2p − 1 , Ap = , Ap+q−r 2(p + q) − 2r + 1 p! n and Cβα11βα22βα33 is defined from the relation (see [5]) Bβα11 (x)Bβα22 (x)Bβα33 (x) = 3 ∑ n α α α n Cβ11β22β33 x , n=0 For the integrals containing the product of four Legendre polynomials the corresponding representations can be written similarly. 3. Now we consider various refined theories of plates and the Kirsch’s problem for the concentration of stresses near the hole. The system of Reissner-Mindlin’s equations for tension-pressure coincides with the classical theory of generalized plane stress. Volume 14, 2010 29 For bending of plates the system of Reissner-Mindlin’s equations can be written in the complex form [3]: ∂z (M11 − M22 + 2iM12 ) + ∂z̄ (M11 + M22 ) − Q+ = M+ , ∂z Q+ + ∂z̄ Q̄+ = M3 , (Q+ = Q1 + iQ2 ), (2∂z = ∂1 − i∂2 ), where (20) 3 M11 − M22 + 2iM12 = 8µh ∂z̄ V+ (V+ = V1 + iV2 ), 3 4(λ∗ +µ) 3 M11 + M22 = h ρ (ρ = 2Re∂z V+ ), 3 5µh Q+ = 3 (2∂z̄ V3 + V+ ) (Reissner), (2∂z̄ V3 + V+ ) (Mindlin), Q+ = 4µh 3 µ∆V+ + 2(λ∗ + µ)∂z̄ ρ − 5µ (2∂z̄ V3 h2 + V+ ) = (21) 3 M+ , 2h3 (22) µ(∆V3 + ρ) = 3 M3 , 5h 2λµ . λ + 2µ The boundary conditions for Kirsch’s problem on the hole’s contour Γ have the form λ∗ := Mll + iMls = 0, Qln = 0 (23) and at infinity we have ∞ M11 = M1 , (M12 = M22 = Q+ )∞ = 0. (24) Now we consider this problem by I. Vekua’s methods. I. Vekua’s first method (so-called “simplified scheme” ) ( ) ( ) (m) (m) (m) (m) (m) (m) (m) ∂z σ11 − σ22 + 2i σ12 + ∂z̄ σ11 + σ22 − σ + + F+ = 0, ( ) (m) (m) (m) (m) (m) (m) (m) ∂z σ+ + ∂z̄ σ̄+ − σ 33 + F3 = 0 σ+ = σ13 + iσ23 , where (m) σ11 (m) − σ22 (m) σ11 (m) + (m) 2i σ12 = (m) 4µ∂z̄ u + (m) ( (m) u+ (m) + σ22 = 2(λ + µ) θ + 2λD3 u 3 ( ) (m) (m) (m) σ+ = µ 2∂z̄ u 3 + D3 u + , (m) σ33 (m) σ3 (m) (m) u1 (m) i u2 ) = + , ((m) ) (m) θ = 2Re∂z u + , (m) = λ θ + (λ + 2µ)D3 u 3 , 2m + 1 = h ( (m−1) (m−3) σ3 + σ3 ) N + 1 ∑ 1 − (−1)s+m (s) u, h 2 s=m (m) 2m + · · · , D3 u (25) (26) 30 Bulletin of TICMI ∫h ( ) 2m + 1 σ = σ iPm xh̄3 dx3 , 2h (m) (m) 2m + 1 F = Φ+ 2h (m) i −h ( (+) σ3 − (−) (−1)m σ3 ) . I. Vekua’s second method (so-called “normed moments method”). In this case the expressions σi3 (i = 1, 2, 3) are compatible with boundary condition on surface x3 = ±h (see [2]): ) ( ( ) (m) (m) (m) (m) (m) (m) (m) ∂z σ11 − σ22 + 2i σ12 + ∂z̄ σ11 + σ22 − σ + + Y+ = 0, (27) (m) (m) (m) (m) ∂z σ+ + ∂z̄ σ̄+ − σ 33 + Y3 = 0, where (m) σ11 (m) σ11 (m) (m) (m) − σ22 + 2i σ12 = 4µ∂z̄ u + , (m) (m) (m) + σ22 = 2(λ + µ) θ + 2λD3 u 3 − ( ) (s) N ∑ (s) λ2 s+m 2εN,m (1 + (−1) ) λ+2µ θ + λD3 u 3 , s=0 ( ( ) N ∑ (m) (m) (m) (s) (s) s+m σ+ = µ 2∂z̄ u 3 + D3 u + − εN,m (1 + (−1) ) 2∂z̄ u 3 + D3 u + ) , (28) s=0 (m) σ33 (m) (m) = λ θ + (λ + 2µ)D3 u 3 − εN,m ( (s) ) N ∑ (s) s+m ) λ θ + (λ + 2µ)D3 u 3 , × (1 + (−1) s=0 ( ) (−1)N +m 2m + 1 1− . εN,m = N (N + 2) N +1 The Kirsch’s problem for these cases can be written as: a) boundary conditions at infinity: ( )∞ ∞ ∞ (0) (0) (0) (0) σ11 = P1 , σ22 = P2 , σ12 = σ3i = 0 (tension − pressure), or (1) σ11 ∞ = M1 , (1) σ22 ( ∞ = M2 , (0) σ12 (0) = σ3i (29) )∞ = 0 (bending), (30) b) boundary conditions on the circular hole (|z| = R): (m) σrr (m) + i σrϑ = 0, (m) σr3 = 0 (m = 0, 1, · · ·, N ), (31) P1 , P2 , M1 , M2 are constants. For the approximation of order N the system of equilibrium equations with (m) respect to components displacement vector u i can be written in the matrix forms: ∆V + AV = X, (32) Volume 14, 2010 31 ∆Ω + BΩ = Y, (33) where V and Ω are column-matrices of the form (N ) (0) (1) (N )) (N )) ( (0) (1) ( (0) (1) T T V = V1 , V1 , ..., V1 , V3 , V3 , ..., V3 , Ω = V2 , V2 , ..., V2 , ( ((m) )) ) (m) (m) (m) (m) (m) (m) (m) u + = u 1 + i u 2 = ∂z̄ V + = ∂z̄ V 1 + i V 2 , u3 = V 3 . Using now Vekua-Bitsadze’s formulas for the homogenous matrix equations (32) and (33) we obtain the complex representation of the general solutions [ ] ∫z V = Re f (z) + R(z, z, t, t)f (t)dt , (34) z0 [ ] ∫z Ω = Re φ(z) + r(z, z, t, t)φ(t)dt , (35) z0 where R and r are the Riemann matrix functions of the equations (32) and (33), f (z) and φ(z) are holomorphic column-matrices. R and r can be represented by Bessel’s functions of the first kind: ( )T ( )T f (z) = fo (z), f1 (z), · · ·, f2N +1 (z) , φ(z) = φ0 (z), φ1 (z), · · ·, φN (z) . The particular solutions of the matrix equations (32) and (33) have the form ∫z ∫z ∧ V (z, z) = ∧ ∧ R(z, z, t, t)X(t, t)dtdt, Ω(z, z) = z0 z 0 ∧ ∫z ∫z ∧ r(z, z, t, t)Y (t, t)dtdt. z0 z 0 ∧ where R and r are matrix functions, which can be also expressed by the Bessel’s functions of the second kind. Conclusion. 1. a) I. Vekua’s approximation of order N = 0 (first method) gives the system of plane deformation equations. The coefficient of stress concentration K, coincides with well-known meaning (0) max σϑϑ K= = 3 (P1 = P, P2 = 0). P b) I. Vekua’s approximation of order N = 0 (second method) and Reissner’s method describe the generalized plane stress, i.e. K = 3. 2. a) I. Vekua’s approximation of order N = 1 (first method) for the tension-pressure gives for K the following formula K =1+2 2κK0 (κ) + [4 + 5(1 − σ 2 )κ 2 ]K1 (κ) , 2(1 − σ 2 )κK0 (κ) + [4 + 5(1 − σ 2 )κ 2 ]K1 (κ) 32 Bulletin of TICMI 2 σ R , i.e. K = K(h, R, σ) depends on h, R, σ (Poisson’s coeffiwhere κ 2 = 1−σ h2 h cient), and when R 0 or Rh → ∞ ⇒ K = 3 (since for each n when x → ∞ √→ π −x we have Kn (x) ∼ 2x e ). b) for the plate’s bending I. Vekua’s approximation N = 1 and Reissner’s method give: (I. Vekua’s N = 1) ( ) 2K2 (κ) 5 − 2σ h 3R2 K =1+ ⇒ K= → 0, κ = 2 K2 (κ) + 2(1 − σ)K0 (κ) 3 − 2σ R h (E. Reissner) 2K2 (κ) 5 + 2σ K =1+ ⇒ Kcl = 3K2 (κ) + 2σK0 (κ) 3 + 2σ ( h 5R2 → 0, κ = R 2h2 ) i.e. Reissner’s coefficient K coincides with the classical result, when Rh → 0. 3. a) I. Vekua’s approximation of order N = 2 (first and second methods) for the tension-pressure solves the 3D problem, when P1 = P2 = const; b) for bending of plate coincides with the Reissner result. 4. a) I. Vekua’s approximation of order N = 3 solves the problem for the tension-pressure when P1 = const, P2 = 0 (II-method). b)I. Vekua’s approximation of order N = 3 (II-method) for bending of plate solves the problem when M1 = const, M2 = 0. References [1] N.I. Muskhelishvili, Some Basic Problems of the Mathematical Theory of Elasticity. Nauka, Moscow, 1966. [2] I.N. Vekua, Shell Theory: General Methods of Construction, Pitman Advanced Publishing Program, Boston-London-Melburne, 1985. [3] E. Reissner, On the Theory of Bending of Plastic Plates. J. of Math. and Phys., 1944, 23, 184-191. [4] A.V. Bitsadze, The Boundary Value Problem for the Elliptical System Equations of the Second Order, Moscow, Nauka, 1966 (in Russian) [5] T.V. Meunargia, A Small-Parameter Method for I. Vekua’s Nonlinear and Nonshallow Shells. Proceeding of the IUTAM Symposium, Springer Science 2008, 155-166. Received 01.09.2010; revised 11.10.2010; accepted 08.12.2010





![Chem_Test_Outline[1]](http://s2.studylib.net/store/data/010130217_1-9c615a6ff3b14001407f2b5a7a2322ac-300x300.png)