Document 11155824
advertisement

1
EÆient Use of the Loal Disontinuous Galerkin
Method for Meshes Sliding on a Cirular Boundary
P. Alotto,
A. Bertoni,
I. Perugia and
IEEE Trans. on Magnetis 38 (2002), 405{408
|In this paper the oupling of disontinuous nite
elements with standard onforming ones is applied to the
speial ase of rotating eletrial mahines. The proposed
sheme exploits the apability of disontinuous methods of
dealing with non-mathing grids, and the lower omputational ost of onforming methods, by using rst ones only
where needed. Therefore, the tehnique is ideally suited for
the treatment of the air-gap region of suh devies where the
rotation of one part of the mesh generates hanging nodes.
The resulting purely nite ement sheme is applied to the
TEAM 24 benhmark problem.
Keywords | Variational methods, disontinuous nite elements, eletrial mahines.
Abstrat
D. Sh
otzau
the lower computational cost of the continuous method, and allows for an easy implementation of the new formulation within
existing standard finite element codes. The DG method adopted
here is the Local Discontinuous Galerkin (LDG) method introduced in [11] for transient convection-diffusion problems, and
analysed in [12] in the case of purely elliptic problems.
In this paper, the basics of the coupled LDG/continuous FE
method are reviewed and its performance is compared with the
one of an existing FEM/BEM code [13] on the TEAM24 benchmark problem. This extends the preliminary investigation presented in [7].
II. Formulation of the problem
I. Introdution
The simulation of rotating electrical machines with Finite Element (FE) methods is not straightforward since the movement
of the rotor with respect to the stator requires meshes that are
moving in certain parts of the domain. During time-stepping,
these movements result in mesh areas where the elements are
non-matching and have so-called hanging nodes. For this reason, FE methods are usually coupled with other techniques
which do not require a mesh in the air-gap between rotor and
stator (BEM, Fourier series expansion), or they are modified or
enhanced in some way to restore potential continuity (Lagrange
multipliers, partial remeshing, overlapping elements) [1], [2],
[3], [4], [5], [6]. In this work an alternative approach, first introduced in [7], which relies entirely on FE methods is used.
The strategy consists in coupling a standard continuous FEM
with a Discontinuous Galerkin (DG) method in a “small” region surrounding the surface where the grids are non-matching
(a recent survey on DG methods can be found in [8]; a unifying
setting for all DG methods known in the literature, in the context
of elliptic problems, has been introduced in [9]). In fact, one of
the main features of DG methods is that they can easily handle
meshes with hanging nodes since no continuity is required at the
interelement boundaries. This is also a key property of the mortar FEM (see [10] for a mortar FE approach for the simulation
of rotating electrical devices). However, in DG methods there
are no Lagrange multipliers associated with the continuity constraints; instead, the Lagrange multipliers are replaced by numerical fluxes, which are fixed functions of the unknowns. The
coupling of a DG with a standard continuous method combines
the ease with which the DG method handles hanging nodes with
Department of Eletrial Engineering, University of Genoa, Via
Opera Pia 11a, 16145, Genoa, Italy. E-mail: alottodie.unige.it.
Department of Eletrial Engineering, University of Genoa, Via
Opera Pia 11a, 16145, Genoa, Italy. E-mail: bertonidie.unige.it.
Department of Mathematis, University of Pavia, Via Ferrata 1,
27100, Pavia, Italy. E-mail: perugiadimat.unipv.it.
Shool of Mathematis, University of Minnesota, Minneapolis, MN
55455. E-mail: shoetzamath.umn.edu.
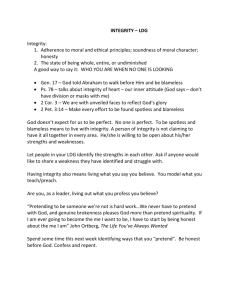
A typical problem which gives rise to hanging nodes is the
TEAM24 benchmark problem, the mesh of which is shown in
Fig. 1. Using standard notation, the non-linear 2D partial differential equation to be solved for the simulation of such a rotating
electrical machine is
dA
1
1
A + = Js uz + (r M (A )) uz ; (1)
0
dt
0
where A is the z-component of the vector potential A, Js the
imposed source current density, M the magnetisation vector, 0
is the magnetic permeability of the air, the conductivity, and
z
z
z
z
uz is the unit vector directed along the z-axis (see [13] and [14]).
The operator d=dt denotes the convective time derivative. External lumped circuit components can be taken into account via
the Tableau Analysis approach by connecting them to the partial
differential equation. For air regions ( = 0; Js = 0; M = 0),
equation (1) reduces simply to the Laplace equation.
As the rotor starts to move, the elements do no longer match
on a slip surface that is placed, for convenience, entirely in the
0.1
Slip surface
0.08
0.06
0.04
0.02
0
−0.02
−0.04
−0.06
−0.08
−0.1
−0.1
−0.08 −0.06 −0.04 −0.02
0
0.02
0.04
0.06
0.08
0.1
Fig. 1. Mesh for the TEAM24 benhmark problem
2
To define the LDG method in 2 , we introduce the auxiliary
variable q := ru2 and write the problem in 2 in a mixed form:
1
111111111111111
000000000000000
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
00000000
11111111
000000000000000
111111111111111
00000000
11111111
000000000000000
111111111111111
00000000
11111111
000000000000000
111111111111111
00000000
11111111
000000000000000
111111111111111
00000000
11111111
000000000000000
111111111111111
00000000
11111111
000000000000000
111111111111111
00000000
11111111
000000000000000
111111111111111
00000000
11111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
q = ru 2
rq =0
u2 = u1
2
slip
h
on :
(2)
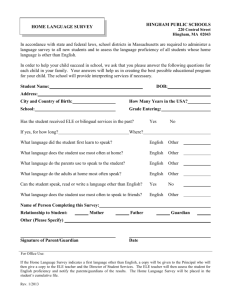
Consider a partition of the air-gap into two disjoint subdomains 1 and 2 , such that the slip surface slip is entirely
contained in 2 , and 2 does not intersect , and define
:= 1 \ 2 = 2 , as shown in Fig. 2. The hanging
nodes resulting from the relative movement of the meshes are
contained in 2 . Thus, we discretise the problem in 2 by using the LDG method (see [11] and [12]), which naturally deals
with hanging nodes, and a standard continuous FE method in
1 ; this is in order to limit the global number of degrees of freedom, which is high in LDG elements. The two methods have to
be coupled at the interface .
Setting ui := uj
i , i = 1; 2, problem (2) can be written as
the following transmission problem:
u = 0
u1 = g
u1 = u2
ru1 n1 = ru2 n2
i
(i = 1; 2)
on in i
on
on
(3)
(4)
(5)
(6)
(ni is the outward normal unit vector to the region i , i = 1; 2).
III. Coupling LDG/ontinuous FE methods
The coupled LDG/continuous FE method for the Laplace
equation has been studied in [15]. Here only the basics of the
approach are recalled (see also [7]).
k
h
K
k
h
air gap region (see Fig. 1). For this reason, the spatial discretisation cannot be carried out by using a standard continuous FE
method. This could be overcome by remeshing the air gap region at each time step, but this is computationally not efficient
and has drawbacks related to the robustness of mesh generators.
FEM/BEM techniques (see, e.g., [13]) avoid these problems altogether, but generate stiffness matrices with dense blocks. The
purely FE method presented in the rest of this paper, instead,
allows for retaining a sparse pattern for the matrix.
Let us concentrate on the air-gap region . By defining u :=
Az , at each time step, the problem in is
u=g
:
Q :=fr 2 L2(
2 )2 : r 2 P (K )2 ; 8K 2 T 2 g
V :=fv2 2 L2(
2 ) : v2 2 P (K ); 8K 2 T 2 g;
Fig. 2. Partition of the air-gap in dierent sub-regions. The slip
surfae slip ontained in 2 is dashed
in on
(7)
(8)
(9)
Let Th2 be a triangulation of 2 with possible hanging nodes and
define
u = 0
in 2
in 2
h
K
where P k (K ) is the space of the polynomials of degree at most
k 1 on K . Notice that the functions in the spaces Qh and Vh
are completely discontinuous across interelement boundaries.
Now, multiply equations (7) and (8) by arbitrary, smooth test
functions r and v 2 , respectively, and integrate by parts over each
element K 2 Th2 . Then, replace the exact solution (q ; u2 ) by
its approximation (q h ; u2h ) in the FE space Qh Vh and approximate the traces of q and u2 on the interelement boundaries
2
bh and u
bh and
by the so-called numerial uxes, denoted by q
defined later on. The resulting FE equations in 2 are
Z
q r dx +
Z
h
K
Z
h
K
Z
q rv 2 d x
h
K
Z
u2 r r dx
K
v2 qb n ds = 0;
(11)
K
h
K
ub2 r n ds = 0
(10)
h
K
for test functions (r ; v ) 2 P k (K )2 P k (K ), for all elements
K 2 Th2 (nK is the outward normal unit vector to K ).
In order to define the numerical fluxes, we need to introduce
some notation. Consider an edge e in the interior of 2 shared
by two elements K + and K of Th2 . Denoting by v and r the traces on K of a scalar function v and a vector-valued
function r that are smooth in K , we define the mean values
and jumps of v and r across e by
ffvgg = (v+ + v )=2
[ v℄ = v+ n + + v n
K
ffrgg = (r+ + r )=2
[ r ℄ = r+ n + + r n :
K
K
2
The numerical fluxes u
bh and
the interior of 2 by
qb
h
K
are defined on the edges
e in
ub2 = ffu2 gg + [ u2 ℄
qb = ffq gg [ u2 ℄ [ q ℄ ;
h e
h
h e
h
and on the edges e lying on
h
h
h
by
ub2 = u1
qb = q
h e
h
h e
h
(u2
h
u1 )n2 ;
h
with a scalar parameter and a vector-valued parameter to
be properly chosen. This completes the definition of the LDG
method in 2 .
In 1 , we use the standard conforming FE method for the
Laplace equation with Neumann boundary condition ru1 n1 =
3
q n2 on
. This, together with (9), is nothing but the usual
way of imposing transmission conditions (5) and (6) in a coupled mixed/standard variational formulation. We emphasize that
in this way results as being a Dirichlet interface on the LDG
side and a Neumann interface on the conforming side.
Consider a conforming triangulation Th1 of 1 (with no hanging nodes), and define
W := fv1 2 H 1 (
1 ) : v1 2 P (K ); 8K 2 T 1 g:
h
k
h
K
The approximation u1h to u1 is sought in the subspace of Wh
of finite element functions satisfying an approximation of the
Dirichlet boundary condition (4), and the FE equation in 1 is
Z
1
ru1
Z
rv 1 d x +
h
qb n2
h
v1 ds = 0;
(12)
for test functions function v 1 2 Wh such that v 1 j = 0. Notice that, again, the trace of q on the edges lying on has been
approximated by the corresponding numerical flux.
The coupled method consists in finding (q h ; u2h ; u1h ) 2 Qh Vh Wh , with u1h satisfying an approximation of the inhomogeneous boundary condition (4), such that for all test functions
(r; v2 ) 2 Qh Vh and for all elements K 2 Th2 ,
Z
q r dx +
Z
Theorem 1: Assume > 0. Then the oupled method
has a unique solution (q h ; u2h ; u1h ) in Qh Vh Wh . Moreover, for independent of the mesh size h and of the
order of 1=h, provided that the exat solution of the ontinuous problem is suÆiently smooth, we have
jju u jj
i
i
h
L
2 (
i )
Ch +1 ;
k
jjq q jj
h
2 (
2 )
L
Ch ;
k
i = 1; 2, with a onstant C independent of h.
Theoretical results in [12] predict a loss of half a power of h
in the rate of convergence of u2 if is chosen independently of
the mesh size h. However, no decrease in the actual numerical
rates of convergence was observed in the experiments of [12]
and [15]. This justifies the simplest choice = const in the
numerical tests described in the following section.
u2 r r dx
h
h
K
variables u1h and u2h only. This local solvability gives the name
to the LDG method.
The convergence rates of the coupled method are given in the
following theorem (see [15]).
K
hZ X
1
+n
2
u2 r n ds
K
K
h
n
Z i
1
+ next u2 ext r n ds
2
e
e
K
;
K
e
Z
X
Z
K
q
h
K
rv 2 d x +
X
e
K
+
Z
u1 r n ds = 0;
K
h
\
e
e
hZ
v2
e
n
1
v2 qext n
2
Z
e
+
+
e
K
q n ds
K
h
n qext next ds
K
h
K
i
u2 ext v2 (next n ) ds
K
K
h
v2 q n ds
Z
K
h
\
Z
e
e
hZ
K
;
h
X
n
u2 v2 ds
e
1
2
K
h
Z
K
h
u2 v2 ds
h
e
i
u1 v2 ds = 0
h
e
(the superscript ‘ext’ denotes quantities taken from outside K ),
and for all test function v 1 2 Wh such that v 1 j = 0,
Z
1
ru1
h
+
rv 1 d x +
Xh
e
Z
u2 v1 ds
q n2 v1 ds
h
e
Z
i
h
e
Z
u1 v1 ds = 0:
h
e
In the implementation of the method, the auxiliary variable q h
can actually be computed in terms of u2h loally element-byelement by using equation (10), giving rise to a problem in the
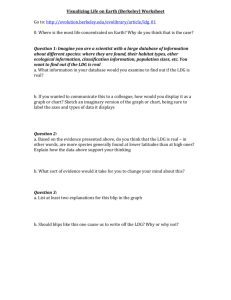
Fig. 3. Flux lines in the air-gap region around the poles after a
rotation of 1 degree
IV. Numerial results
The code implementing the coupled LDG/continuous
method, using first order elements P 1 in both regions 1 and
2 , has been tested and compared with an existing FEM/BEM
code on a slightly modified version of the TEAM24 benchmark
problem [13], where the rotor has been left free to move. Both
codes have been run on a DEC Alpha 500au workstation and
the main comparative results are shown in Table I, in terms of
number of nonzeroes in the coefficient matrix and CPU time
(the simulation consisted of 3000 time-steps and took the nonlinearity of the iron into account). The mesh used in the simulation, shown in Fig. 1, consisted of 10432 nodes and 20442
elements. The region 2 was formed by those elements having at least one node on the slip surface slip (640 triangles).
The FEM/BEM model was built from the LDG/continuous one
by slightly separating the rotor and stator meshes along slip .
Fig. 3 shows the flux lines in the air-gap region around the upper pole after a rotation of 1 degree. Hanging nodes in the
mesh due to the movement and the creation of voids due to the
4
TABLE I
Comparison of FEM/BEM vs. LDG/ontinuous methods
Method
Nonzeroes CPU time [s℄
LDG/ont.
67 141
11 231.5
FEM/BEM
167 847
19 326.9
8
FEM-BEM
LDG
Current [A]
6
V. Conlusions
The proposed purely FE method, coupling standard continuous and discontinuous elements, allows for dealing with nonmatching grids by preserving a sparse structure of the coefficient matrix of the resulting algebraic linear system, and thus is
numerically more efficient than FEM/BEM schemes. Numerical evidence, provided on the basis of the TEAM24 benchmark
problem, shows that the modest inaccuracies introduced by the
method have negligible effects on the mechanical properties of
the simulated device.
2
0
0
0.05
0.10
0.15
0.20
0.25
0.30
Time [s]
20
FEM-BEM
LDG
10
Angle [deg]
use of straight-sided elements are clearly visible, as well as inaccuracies along slip , that do not propagate into the P 1 region.
In experiments carried out on problems with straight interfaces,
with no interelement voids even for non-matching grids, these
inaccuracies have not been detected. If the line chosen to integrate the Maxwell stress tensor lies entirely in the P 1 region, the
resulting integral quantities (current, angular displacement and
torque), as reported in Fig. 4, agree very well with the ones obtained with the FEM/BEM code, differences being due mainly
to the smoothness of the BEM solution in the air gap.
4
0
-10
-20
-30
0
0.05
0.10
0.15
0.20
0.25
0.30
Time [s]
40
FEM-BEM
LDG
20
[1℄ D. Rodger, H. C. Lai, and P. J. Leonard, \Coupled elements for
problems involving movement,"
, vol. 26,
no. 2, pp. 548{550, 1990.
[2℄ Y. Marehal, G. Meunier, J. L. Coulomb, and H. Magnin,
\A general purpose tool for restoring inter-element ontinuity,"
, vol. 28, no. 2, pp. 1728{1731, 1992.
[3℄ K. Muramatsu, Y. Yokoyama, N. Takahashi, A. Nafalski, and
O. Gol, \Eet of ontinuity of potential on auray in magneti
eld analysis using nononforming mesh,"
,
vol. 36, no. 4, pp. 1578{1582, 1990.
[4℄ H. Kometani, Sakabe, and Kameari, \3-d analysis of indution
motor with skewed slots using regular oupling mesh,"
, vol. 36, no. 4, pp. 1769{1773, 2000.
[5℄ N. Sadowski, Y. Lefevre, M. Lajoie-Mazen, and J. Cros, \Finite
element torque alulation in eletrial mahine while onsidering the movement,"
, vol. 28, no. 2, pp.
1410{1413, 1992.
[6℄ I. Tsukerman, \Overlapping nite elements for problems with
movement,"
, vol. 28, no. 5, pp. 2247{2249,
1992.
[7℄ P. Alotto, A. Bertoni, I. Perugia, and D. Shotzau, \A loal
disontinuous Galerkin method for the simulation of rotating
eletrial mahines,"
, vol. 20, pp. 448{462, 2001.
[8℄ B. Cokburn, G. E. Karniadakis, and C.-W. Shu, Eds.,
, vol. 11 of
, Springer-Verlag,
2000.
[9℄ D.N. Arnold, F. Brezzi, B. Cokburn, and L.D. Marini, \Unied analysis of disontinuous Galerkin methods for ellipti problems,"
, 2001, to appear.
[10℄ F. Rapetti, A. Bua, F. Bouillaut, and Y. Maday, \Simulation of
a oupled magneto-mehanial system through the sliding-mesh
mortar element method,"
, vol. 19, pp. 332{340, 2000.
[11℄ B. Cokburn and C.W. Shu, \The loal disontinuous Galerkin
nite element method for onvetion-diusion systems,"
, vol. 35, pp. 2440{2463, 1998.
IEEE Trans. Magn.
IEEE Trans. Magn.
Torque [Nm]
Referenes
0
-20
IEEE Trans. Magn.
-40
0
0.05
IEEE
Trans. Magn.
IEEE Trans. Magn.
IEEE Trans. Magn.
COMPEL
Dison-
tinuous Galerkin Methods. Theory, Computation and Applia-
tions
Let. Notes Comput. Si. Eng.
SIAM J. Num. Anal.
COMPEL
SIAM
J. Num. Anal.
0.10
0.15
0.20
0.25
0.30
Time [s]
Fig. 4. Comparison between the FEM-BEM and LDG algorithms
(from top to bottom: urrent, position, torque)
[12℄ P. Castillo, B. Cokburn, I. Perugia, and D. Shotzau, \An a
priori error analysis of the loal disontinuous Galerkin method
for ellipti problems,"
, vol. 38, pp. 1676{
1706, 2000.
[13℄ P. Alotto, A. Bertoni, and P. Molno, \A ombined FEM-BEM
and Tableau Analysis for the modelling of moving devies fed
by arbitrary lumped parameters eletrial iruits," in
SIAM J. Num. Anal.
Proeed-
ings of 4th Int. Workshop on Eletri and Magneti Fields from
Numerial Models to Industrial Appliations, 12-15 May 1998,
, 1998, pp. 243{248.
[14℄ S. Kurz, J. Fetzer, and T. Kube, \BEM-FEM oupling in eletromagnetis: a 2-d wath stepping motor driven by a thin wire
oil," in
, 1996, pp. 492{496.
[15℄ I. Perugia and D. Shotzau, \On the oupling of loal disontinuous Galerkin and onforming nite element methods,"
, to appear.
Marseille, Frane
Proeedings of 7th IGTE Symposium on Numerial
Field Computation in Eletrial Engineering, 23-25 September
1996, Graz, Austria
J. Si.
Comp.