March 25, 2007 14:13 WSPC/INSTRUCTION FILE paper
advertisement

March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
Energy norm a posteriori error estimation of hp-adaptive discontinuous
Galerkin methods for elliptic problems
Paul Houston
School of Mathematical Sciences, University of Nottingham, University Park, Nottingham, NG7
2RD, England, Email: Paul.Houston@ nottingham.ac.uk. Supported by the EPSRC (Grant
GR/R76615).
Dominik Schötzau
Mathematics Department, University of British Columbia, 121-1984 Mathematics Road,
Vancouver, BC V6T 1Z2, Canada, email: schoetzau@ math.ubc.ca. Supported in part by the
Natural Sciences and Engineering Research Council of Canada.
Thomas P. Wihler
Department of Mathematics and Statistics, McGill University, 805 Sherbrooke W., Montreal,
QC H3A 2K6, Canada, email: wihler@ math.mcgill.ca. Supported by the Swiss National
Science Foundation under project PBEZ2-102321.
Math. Models Methods Appl. Sci., Vol. 17, pp. 33-62, 2007
In this paper, we develop the a posteriori error estimation of hp-version interior penalty
discontinuous Galerkin discretizations of elliptic boundary-value problems. Computable
upper and lower bounds on the error measured in terms of a natural (mesh-dependent)
energy norm are derived. The bounds are explicit in the local mesh sizes and approximation orders. A series of numerical experiments illustrate the performance of the proposed
estimators within an automatic hp-adaptive refinement procedure.
Keywords: Discontinuous Galerkin methods; a posteriori error estimation; hp-adaptivity;
elliptic problems.
AMS Subject Classification: 65N30, 65N35, 65N50
1. Introduction
In this article, we derive hp-version energy norm a posteriori error bounds for discontinuous Galerkin discretizations of the following elliptic model problem: find u
such that
−∆u = f
u=g
1
in Ω,
(1.1)
on Γ.
(1.2)
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
2
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
Here, we take Ω to be a polygonal Lipschitz domain in R2 with boundary Γ = ∂Ω,
f is a given source term in L2 (Ω) and g is a Dirichlet boundary datum in H 1/2 (Γ).
The standard weak formulation of (1.1)–(1.2) is to find u ∈ H 1 (Ω) such that u|Γ = g
and
Z
Z
A(u, v) :=
∇u · ∇v dx =
f v dx
(1.3)
Ω
Ω
for all v ∈ H01 (Ω).
It is well-known that solutions of elliptic problems in polygons may exhibit corner
singularities. This lack of smoothness typically results in degraded convergence rates
of h- and also p-version finite element methods used for the discretization of such
problems. However, it has been shown that hp-version finite element methods, which
are based on locally refined meshes and variable approximation orders, can achieve
exponential rates of convergence despite the presence of singularities; for details, we
refer the reader to 5, 16, 17, 38, and the references cited therein.
Discontinuous Galerkin methods (DG, for short) are particularly well-suited
for the application within hp-version algorithms. Indeed, within a DG approach,
non-matching grids containing hanging nodes and non-uniform polynomial approximation degrees can easily be handled. For recent surveys on DG methods, we refer
the reader to the articles 1, 11, 12, 13. The a priori error analysis of DG methods for
elliptic problems is relatively well understood by now and a large body of literature
is available; in the context of the hp-version of the DG method, we mention here the
articles 10, 15, 23, 32, 33, 35, 36, 37, 40, and the references cited therein. However,
there are considerably fewer papers that are concerned with the a posteriori error
estimation for DG methods applied to elliptic boundary-value problems. Regarding
L2 -norm or functional error estimation for the h-version of the DG method, we refer
the reader to 7, 28, 34, and the references therein. An extension to hp-adaptive DG
methods was considered in 18; see, also, 25, for a recent review of goal-oriented
a posteriori error estimation for both conforming and DG finite element methods.
Energy norm error estimation for h-version DG methods for diffusion problems has
been studied in 6, 7, 8, 29. Finally, mixed DG approximations to the time-harmonic
Maxwell operator and the Stokes equations are considered in 20, 22, respectively.
While the proof of the energy norm a posteriori error bounds in 7 hinges on a
saturation assumption on the finite element spaces, the analyses in 6, 8, 20 are based
on exploiting suitable Helmholtz decompositions of the error, together with the local conservation properties of the underlying DG method (see 9 and the references
therein for closely related a posteriori error estimation techniques for nonconforming methods). Yet another approach was developed in 29; it crucially relies on the
approximation of discontinuous finite element functions by conforming ones. A similar idea was then used in the recent article 22, where energy norm a posteriori
error bounds are derived for the mixed h-version DG approximation of the Stokes
problem. Indeed, the approach in 22 employs a norm equivalence property for discontinuous finite element spaces (see 19, Theorem 5.3), which is a consequence of the
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
3
approximation results in 29, Section 2.1. However, in contrast to the analysis in 29,
the proof of the bound in 22 is based on rewriting the method in a non-consistent
manner using lifting operators in the spirit of 1, see also 33. Thereby, it is possible
to derive DG a posteriori error bounds under minimal regularity assumptions on
the underlying analytical solution. Here, we emphasize that all the work above is
concerned with the h-version of DG methods only.
In this paper, we extend the technique proposed in 22 to the hp-version of the
DG method and derive reliable upper bounds on the error measured in terms of
a natural (mesh-dependent) energy norm for the DG approximation of the elliptic
boundary-value problem (1.1)–(1.2); we refer to our recent conference paper 21 for
the extension of this analysis to the hp-DG approximation of the Stokes equations.
In particular, we generalize the crucial norm equivalence result in 22 to hp-DG finite element spaces consisting of either triangular or quadrilateral elements, under
the assumption that the computational mesh is conforming. With this result, the
upper (reliability) bounds are then obtained using the arguments from 22 and the
hp-version Scott-Zhang interpolant from 30. Additionally, lower (efficiency) bounds
will also be derived; they follow with only minor modifications from the techniques
presented in 31. As in the case of the conforming hp-finite element methods considered there, reliability and efficiency of our error bounds cannot be established
uniformly with respect to the polynomial degree, since the proof of efficiency relies on employing inverse estimates which are suboptimal in the spectral order.
Finally, numerical experiments highlighting the performance of the proposed estimator within an hp-adaptive mesh refinement algorithm will also be presented.
The outline of this article is as follows. In Section 2, we introduce the hp-DG
method for the numerical approximation of the boundary-value problem (1.1)–(1.2).
In Section 3, our a posteriori error bounds are presented and discussed; here both
upper and lower energy norm bounds will be derived. The proofs of these results
will be given in Section 4; Section 5 will be devoted to the proof of the norm
equivalence property for hp-DG spaces. In Section 6, we present a series of numerical
experiments to illustrate the performance of the proposed error estimators within
an automatic hp-mesh refinement algorithm. Finally, in Section 7 we summarize the
work presented in this paper and draw some conclusions.
Throughout the paper, we use the following standard function spaces. For a
polygonal Lipschitz domain D ⊂ R2 or an interval D = (a, b) we denote by H k (D)
the Sobolev space of order k ∈ N0 , endowed with the semi-norm | · |k,D and norm
k·kk,D . For non-integers k ≥ 0, we define H k (D) and k·kk,D by the K-method of interpolation; see 39. We denote by H k (D)2 the space of vector fields with components
in H k (D); for simplicity, the standard product norm in H k (D)2 is also denoted by
k · kk,D . Furthermore, we set L2 (D) = H 0 (D) and write H01 (D) for the subspace of
H 1 (D) of functions with vanishing trace on D. The space H 1/2 (∂D) is the space of
traces of functions in H 1 (Ω); we denote its usual norm by k · k1/2,∂D . Finally, for
1/2
an interval D = (a, b), let H00 (D) be the interpolation space (L2 (D), H01 (D))1/2
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
4
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
defined by the K-method of interpolation. We endow it with the interpolation norm
1/2
k · k1/2,00,D . If D is a straight bounded line segment in R2 , the space H00 (D) can
be defined straightforwardly by mapping D onto an interval.
2. The hp-version interior penalty method
In this section, we introduce the hp-version of the (symmetric) interior penalty
discontinuous Galerkin method for the approximation of (1.1)–(1.2).
2.1. Finite element spaces
We consider shape-regular conforming meshes Th that partition Ω ⊂ R2 into open
triangles and parallelograms {K}K∈Th . Each element K ∈ Th can then be affinely
b which is either the triangle Tb =
mapped onto the generic reference
element K
√
{ (x, y) : −1 < x < 1, 0 < y < 3(1−|x|) } or the square Sb = (−1, 1)2 , respectively.
The diameter of an element K ∈ Th is denoted by hK . Due to our assumptions
on the meshes, these diameters are of bounded variation, that is, there is a constant
ρ1 ≥ 1 such that
ρ−1
1 ≤ hK /hK 0 ≤ ρ1 ,
(2.1)
whenever K and K 0 share a common edge. We store the elemental diameters in the
mesh size vector h = {hK : K ∈ Th }. Similarly, we associate with each element
K ∈ Th a polynomial degree kK ≥ 1 and define the degree vector k = {kK : K ∈
Th }. We assume that k is of bounded variation as well, that is, there is a constant
ρ2 ≥ 1 such that
ρ−1
2 ≤ kK /kK 0 ≤ ρ2 ,
(2.2)
whenever K and K 0 share a common edge. Additionally, we suppose that there
exists a constant ρ3 > 0 such that
|kK − kK 0 | ≤ ρ3 ,
(2.3)
for all pairs of boundary elements K, K 0 ∈ Th with ∂K ∩ ∂K 0 ∩ Γ 6= ∅. The technical
assumption (2.3) is required in Lemma 4.4 where we recall the hp-Scott-Zhang
interpolation result from 30, Theorem 2.4, for the approximation of H 1 -functions
with inhomogeneous boundary conditions.
For a partition Th of Ω and a degree vector k, we define the hp-version discontinuous Galerkin finite element space Vh by
Vh = { v ∈ L2 (Ω) : v|K ∈ SkK (K), K ∈ Th }.
(2.4)
Here, SkK (K) is the space PkK (K) of polynomials of total degree ≤ kK , if K is a
triangle, or the space QkK (K) of polynomials of degree ≤ kK in each variable, if K
is a parallelogram.
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
5
2.2. Trace operators
Next, we define some trace operators that are required for the DG method. To
this end, we denote by EI (Th ) the set of all interior edges of the partition Th of
Ω, and by EB (Th ) the set of all boundary edges of Th . Furthermore, we define
E(Th ) = EI (Th ) ∪ EB (Th ). The boundary ∂K of an element K and the sets ∂K \ Γ
and ∂K ∩ Γ will be identified in a natural way with the corresponding subsets of
E(Th ).
Let K + and K − be two adjacent elements of Th , and x an arbitrary point on
the interior edge κ ∈ EI (Th ) given by κ = ∂K + ∩ ∂K − . Furthermore, let v and q
be scalar- and vector-valued functions, respectively, that are smooth inside each
element K ± . By (v ± , q± ), we denote the traces of (v, q) on κ taken from within the
interior of K ± , respectively. Then, the averages of v and q at x ∈ κ are given by
{{v}} =
1 +
(v + v − ),
2
{{q}} =
1 +
(q + q− ),
2
respectively. Similarly, the jumps of v and q at x ∈ κ are given by
[[v]] = v + nK + + v − nK − ,
[[q]] = q+ · nK + + q− · nK − ,
respectively, where we denote by nK ± the unit outward normal vector of ∂K ± ,
respectively.
On a boundary edge κ ∈ EB (Th ), we set {{v}} = v, {{q}} = q, and [[v]] = vn,
with n denoting the unit outward normal vector on the boundary Γ.
2.3. Interior penalty discretization
For a mesh Th on Ω and a polynomial degree vector k, let Vh be the hp-version
finite element space defined in (2.4). We consider the (symmetric) interior penalty
discretization of (1.1)–(1.2): find uh ∈ Vh such that
Ah (uh , v) = Fh (v)
for all v ∈ Vh , where
X Z
Ah (u, v) =
K∈Th
+
Fh (v) =
Z
K
X Z
κ∈E(Th )
Ω
∇u · ∇v dx −
κ
f v dx −
X Z
κ∈E(Th )
κ
(2.5)
{{∇h v}} · [[u]] + {{∇h u}} · [[v]] ds
c [[u]] · [[v]] ds,
X
κ∈EB (Th )
Z
κ
g∇h v · n ds +
X
κ∈EB (Th )
Z
cgv ds.
κ
Here, ∇h denotes the elementwise gradient operator. Furthermore, the function
c ∈ L∞ (E(Th )) is the discontinuity stabilization function that is chosen as follows:
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
6
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
we define the functions h ∈ L∞ (E(Th ))
(
min(hK , hK 0 ),
h(x) :=
hK ,
(
max(kK , kK 0 ),
k(x) :=
kK ,
and k ∈ L∞ (E(Th )) by
x ∈ κ ∈ EI (Th ), κ = ∂K ∩ ∂K 0 ,
x ∈ κ ∈ EB (Th ), κ ∈ ∂K ∩ Γ,
x ∈ κ ∈ EI (Th ), κ = ∂K ∩ ∂K 0 ,
x ∈ κ ∈ EB (Th ), κ ∈ ∂K ∩ Γ,
and set
c = γk2 h−1 ,
(2.6)
with a parameter γ > 0 that is independent of h and k.
It can be shown that there is a parameter γmin > 0 independent of h and k such
that for γ ≥ γmin the DG method in (2.5) is stable and possesses a unique solution;
cf. 40, Proposition 3.8, for example.
3. Energy norm hp-a posteriori error estimation
In this section, we present our main results.
3.1. A reliable hp-a posteriori error bound
We first state and discuss an energy norm hp-a posteriori error estimate which provides a reliable upper bound on the approximation error for the DG method (2.5).
To this end, we introduce the space
V (h) = Vh + H 1 (Ω),
and endow it with the norm
X Z
kvk21,h =
K∈Th
K
|∇v|2 dx +
X Z
κ∈E(Th )
κ
γk2 h−1 |[[v]]|2 ds;
(3.1)
we shall refer to k · k1,h as the energy norm.
Next, in order to define our a posteriori error indicators, we let gh be a piecewise
polynomial approximation in H 1/2 (Γ) of the Dirichlet datum g. That is, gh is the
trace of a function in H 1 (Ω) and satisfies
gh |κ ∈ PkK (κ),
κ ∈ EB (Th ), κ ∈ ∂K ∩ Γ, K ∈ Th .
(3.2)
For example, if g belongs to C 0 (Γ) and is smooth on each edge, it is possible to
construct an approximation gh such that gh (P ) = g(P ) at the end points of each
edge κ ∈ EB (Th ) and such that kg − gh k1/2,00,κ is optimally convergent in the mesh
size and the polynomial degree (up to a logarithmic loss in the polynomial degree).
This leads to an optimal approximation of g in H 1/2 (Γ); we refer the reader to 4,
and the references cited therein for details.
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
7
For each element K ∈ Th , we then introduce the local error indicator ηK which
is given by the sum of the three terms
2
2
2
ηK
= ηR
+ ηE
+ ηJ2K .
K
K
(3.3)
The first term ηRK is the interior residual defined by
−2 2
2
ηR
= kK
hK kΠh f + ∆uh k20,K ,
K
(3.4)
where Πh f denotes the elementwise L2 (K)-projection of f onto the space SkK −1 (K)
of polynomials of degree kK − 1. The second term ηEK is the edge residual given by
1 X
2
kk−1/2 h1/2 [[∇h uh ]]k20,κ .
(3.5)
ηE
=
K
2
κ∈∂K\Γ
Finally, the third term ηJK measures the jumps of the approximate solution uh and
is defined by
X
X
1
γkkh−1/2 (uh − gh )k20,κ ,
(3.6)
ηJ2K =
γ kkh−1/2 [[uh ]]k20,κ +
2
κ∈∂K∩Γ
κ∈∂K\Γ
with gh denoting the approximation of g in (3.2).
The following theorem states that, up to standard data approximation terms,
the error indicators in (3.3)–(3.6) give rise to a reliable energy norm hp-a posteriori
error bound.
Theorem 3.1. Let u ∈ H 1 (Ω) be the analytical solution of (1.1)–(1.2) and uh ∈ Vh
its hp-DG approximation obtained by (2.5) with γ ≥ max(1, γmin ). Let the local error
indicators be defined by (3.3)–(3.6). Then, the following hp-a posteriori error bound
holds
!1/2
X
2
ku − uh k1,h ≤ CEST
+ CAP P A(f − Πh f, g − gh ),
(3.7)
ηK
K∈Th
with positive constants CEST and CAP P which are independent of γ, h, and k.
Here, A(f − Πh f, g − gh ) is the data approximation term given by
X
−2 2
A(f − Πh f, g − gh )2 =
kK
hK kf − Πh f k20,K + kg − gh k21/2,Γ
K∈Th
+
X
κ∈EB (Th )
γkkh−1/2(g − gh )k20,κ .
Remark 3.1. We emphasize that the assumption γ ≥ max(1, γmin) implies that
CEST and CAP P are independent of γ.
Remark 3.2. The weight kh−1/2 in the jump estimators (as well as in the jump
contribution in the energy norm k · k1,h ) is slightly suboptimal in k with respect to
standard hp-approximation properties. This is a notorious difficulty for DG methods
which is caused by the fact that the interior penalty stabilization function c in (2.6)
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
8
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
has to be chosen suboptimally in k in order to ensure stability. The same problem
shows up in the a priori error analysis of DG methods; see, e.g., 23, 33, and the
references cited therein.
Remark 3.3. As has been previously pointed out, the proof of Theorem 3.1 is
based on the technique developed in 22 for h-version DG approximations of the
Stokes equations, together with the hp-interpolation results of 30. To this end, we
extend the norm equivalence result of 22 to hp-version DG finite element spaces.
This crucial result will be established in Section 5 and is the main reason why
we restrict our analysis to conforming meshes. While the extension to irregular
meshes with no additional loss in the polynomial approximation order remains an
open problem, the numerical results in Section 6 clearly indicate that the proposed
estimator works equally well on 1-irregularly refined quadrilateral meshes.
3.2. Efficiency
The estimator in Theorem 3.1 cannot be shown to be efficient uniformly in the
polynomial degree. Indeed, as for conforming hp-methods, estimators that are both
reliable and efficient in the polynomial degree are not currently available within the
literature; cf. 31 and the references therein. The main reason for this is that deriving
efficiency bounds involves the use of inverse estimates which are suboptimal in the
polynomial degree.
In order to minimize the dependence on the polynomial degree in the efficiency
bounds, the use of weighted versions of the local error indicators ηK for conforming
hp-methods was recently proposed in 31. Following that approach, we generalize
our estimators ηK for the DG method to a family of weighted estimators ηα;K , with
α ∈ [0, 1]; here, η0;K coincides with ηK and is reliable, whereas the best efficiency
bounds are obtained for ηα;K , with α = 1.
b we define the weight function Φ b (x) = dist(x, ∂ K).
b
On the reference element K,
K
−1
b
For an arbitrary element K ∈ Th , we set ΦK = cK ΦK
b ◦ FK , where FK : K →
K
is
the
elemental
transformation
and
c
is
a
scaling
factor chosen such that
K
R
ΦK dx = meas(K). Similarly, we define on the reference interval Ib = (−1, 1),
K
the weight function ΦIb(x) = 1 − x2 . For an interior edge κ, the weight Φκ is then
defined by Φκ = cκ ΦIb◦Fκ−1 , where RFκ is the affine transformation that maps (−1, 1)
onto κ and cκ is chosen such that κ Φκ ds = length(κ).
As in 31, for each element K ∈ Th and α ∈ [0, 1], we introduce the weighted
local error indicator ηα;K , which is given by
2
2
2
ηα;K
= ηα;R
+ ηα;E
+ ηJ2K ,
K
K
(3.8)
where the terms ηα;RK and ηα;EK are defined, respectively, by
α/2
−2 2
2
ηα;R
= kK
hK k(Πh f + ∆uh )ΦK k20,K ,
K
1 X
2
2
kk−1/2 h1/2 [[∇h uh ]]Φα/2
ηα;E
=
κ k0,κ .
K
2
κ∈∂K\Γ
(3.9)
(3.10)
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
9
The third term ηJK in (3.8) is left unchanged and is given by (3.6).
Clearly, for α = 0, the estimator ηα;K coincides with our original estimator ηK
in (3.3), that is, ηK = η0;K ; Theorem 3.1 then shows that η0;K is reliable.
From the inverse estimates in 31, Lemma 2.4 and Theorem 2.5, it can be seen
that
α
η0;RK ≤ CkK
ηα;RK ,
α
η0;EK ≤ CkK
ηα;EK ,
K ∈ Th ,
with a constant C that is independent of the local mesh sizes and the polynomial
degrees. Thereby, we deduce the following result.
Corollary 3.1. Let α ∈ [0, 1]. Under the assumptions of Theorem 3.1, we have
!1/2
X
2α 2
2α 2
2
0
kK ηα;RK + kK ηα;EK + ηJK
+CAP P A(f −Πh f, g−gh ),
ku−uhk1,h ≤ CEST
K∈Th
0
CEST
with a constant
that is independent of α, γ, h, and k. The constant CAP P is
the same as in Theorem 3.1.
Next, we discuss the efficiency of the error indicator ηα;K .
Theorem 3.2. Let u ∈ H 1 (Ω) be the analytical solution of (1.1)–(1.2) and uh ∈ Vh
its hp-DG approximation obtained by (2.5). Writing ηα;K to denote the weighted
error indicators defined in (3.8), we have the following bounds:
(i) Let α ∈ [0, 1]. For any ε > 0, there is a constant Cε , independent of α, h,
k, and K ∈ Th , such that
h
i
2(1−α)
max(1+2ε−2α,0) −2 2
2
2
2
ηα;R
≤
C
k
k∇(u−u
)k
+k
k
h
kf
−Π
f
k
.
ε
h
h
0,K
K
0,K
K
K
K
K
(ii) Let α ∈ [0, 1]. For any ε > 0, there is a constant Cε , independent of α, h,
k, and K ∈ Th , such that
h
i
max(1+2ε−2α,0)
2
2
2ε −2 2
2
ηα;E
≤
C
k
k
k∇
(u−u
)k
+k
k
h
kf
−Π
f
k
ε K
K
h
h 0,δK
h
K K K
0,δK ,
K
S 0
where δK = {K ∈ Th : K 0 and K share a common edge }.
(iii) There is a constant C, independent of h, k, and K ∈ Th , such that
i
h X 1
X
γkkh−1/2(g − gh )k20,κ .
ηJ2K ≤ C
γ kkh−1/2 [[u − uh ]]k20,κ +
2
κ∈∂K
κ∈∂K∩Γ
The constants Cε , C in the above estimates (i)–(iii) are independent of γ.
The proof of Theorem 3.2 follows immediately from the results in 31; for sake
of completeness, we present the main steps in Section 4.5.
We emphasize that the constants in Theorem 3.2 are independent of the mesh
size for any α ∈ [0, 1]. Hence, the estimators ηα;K , and in particular the estimator
ηK = η0;K in (3.3), are both reliable and efficient in the mesh size.
On the other hand, Corollary 3.1 and Theorem 3.2 indicate that simultaneous
reliability and efficiency, with respect to the polynomial degree, cannot be achieved
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
10
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
for any α ∈ [0, 1]. While the best reliability bounds are the ones for the estimator
ηK = η0;K in (3.3), the best efficiency bounds are obtained for ηα;K with α = 1.
For the estimators ηK in (3.3) the efficiency bound is suboptimal in the polynomial
degree by one order. Nevertheless, our numerical results in Section 6 confirm that
the reliable estimator η0;K works fairly well and accurately in combination with
hp-refinement. In particular, we show that adaptive hp-refinement based on ηK =
η0;K leads to exponential convergence of the approximations, indicating that the
suboptimal dependence on the polynomial degree of the efficiency bound is not
significant in this situation.
4. Proofs
In Sections 4.1–4.4, we prove the hp-a posteriori error bound stated in Theorem 3.1;
the derivation of this result follows the h-version approach developed in 22. Finally,
in Section 4.5, the proof of Theorem 3.2 is presented.
4.1. Extension of the discontinuous Galerkin forms
We begin by suitably extending the forms Ah and Fh to the continuous level using
the lifting operators introduced in 1; see also 33. This will make it possible to
carry out the hp-a posteriori error analysis in this paper even under the (minimal
regularity) assumption that the exact solution u of (1.1)–(1.2) belongs to H 1 (Ω)
only.
To this end, we introduce the auxiliary space
Σh = { q ∈ L2 (Ω)2 : q|K ∈ SkK (K)2 , K ∈ Th },
and define the operator L : V (h) → Σh by
Z
Ω
L(v) · q dx =
X Z
κ∈E(Th )
κ
[[v]] · {{q}} ds
∀q ∈ Σh .
For a function ge ∈ H 1/2 (Γ), we further define the lifting Uge ∈ Σh by
Z
Ω
Uge · q dx =
X
κ∈EB (Th )
Z
κ
ge q · n ds
∀q ∈ Σh .
Since the analytical solution u of (1.1)–(1.2) belongs to H 1 (Ω), we have that
[[u]] = 0 on EI (Th ), and hence there holds
L(u) = Ug ,
where g is the Dirichlet boundary datum in (1.2).
(4.1)
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
11
We are now ready to introduce the following auxiliary forms
X Z
X Z
e
Ah (u, v) =
∇u · ∇v dx −
L(u) · ∇v + L(v) · ∇u dx
K∈Th
+
Feh (v) =
Z
K
X Z
κ∈E(Th )
Ω
K∈Th
κ
f v dx −
K
c [[u]] · [[v]] ds,
X Z
K∈Th
K
Ug · ∇v dx +
X
κ∈EB (Th )
Z
cgv ds.
κ
We observe that
eh = Ah
A
on Vh × Vh ,
Feh = Fh
on Vh .
Hence, we may rewrite the discrete problem (2.5) in the following equivalent form:
find uh ∈ Vh such that
eh (uh , v) = Feh (v)
A
∀v ∈ Vh .
(4.2)
∀v ∈ H01 (Ω).
(4.3)
eh and Feh , and the weak
Furthermore, taking into account (4.1), the definition of A
formulation in (1.3), it can be readily seen that the analytical solution u ∈ H 1 (Ω)
of (1.1)–(1.2) satisfies
4.2. Stability
eh (u, v) = Feh (v)
A
We now discuss some crucial stability properties. We begin by reviewing the following stability results for L and Uge; see 33 for details.
Lemma 4.1. There exists a constant CL > 0 such that
X Z
kL(v)k20,Ω ≤ CL γ −1
γk2 h−1 |[[v]]|2 ds,
κ∈E(Th )
kUg1 − Ug2 k20,Ω ≤ CL γ −1
X
κ∈EB (Th )
κ
Z
κ
γk2 h−1 |g1 − g2 |2 ds,
v ∈ V (h),
g1 , g2 ∈ H 1/2 (Γ).
The constant CL is independent of γ, h, and k, but depends on the shape-regularity
of the mesh.
Remark 4.1. The constant CL in Lemma 4.1 is independent of the constants ρ1 ,
ρ2 , and ρ3 in (2.1), (2.2), and (2.3), respectively.
eh .
In the next two lemmas, we recall the basic stability properties of the form A
The proof of the first lemma follows immediately from Lemma 4.1, the definition
of the norm k · k1,h and the Cauchy-Schwarz inequality; cf. 33, Proposition 3.1.
Lemma 4.2. For any u, v ∈ V (h), we have
eh (u, v)| ≤ CC kuk1,hkvk1,h ,
|A
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
12
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
where CC = max(2, 1 + CL γ −1 ) and CL is the constant arising in Lemma 4.1.
We remark that CC can be bounded independently of γ provided that γ ≥ 1.
eh .
The second lemma is an immediate consequence of the definition of A
Lemma 4.3. For any u ∈ H01 (Ω), the following identity holds
eh (u, u) = kuk21,h.
A
Proof. For u ∈ H01 (Ω), Rwe have that [[u]] = 0 over all edges. This implies that
2
2
eh (u, u) =
L(u) = 0 and A
Ω |∇u| dx = kuk1,h , as required.
Next, we state an hp-version decomposition result for discontinuous finite element spaces. To this end, let Vhc = Vh ∩ H01 (Ω). The orthogonal complement in Vh
of Vhc with respect to the norm k · k1,h is denoted by Vh⊥ , such that
Vh = Vhc ⊕ Vh⊥ .
(4.4)
The following equivalence result holds; it is an extension to hp-version DG spaces
of the corresponding h-version decomposition result derived in 19, Theorem 5.3; see
also 29, Section 2.1.
Proposition 4.1. Assume that γ ≥ max(1, γmin ). The expression
1/2
X Z
γk2 h−1 |[[v]]|2 ds
v 7→
κ∈E(Th )
κ
is a norm on Vh⊥ . This norm is equivalent to the norm k · k1,h (on the space Vh⊥ )
and there is a constant CP > 0 such that
1/2
X Z
γk2 h−1 |[[v]]|2 ds
≤ CP kvk1,h
kvk1,h ≤ CP
κ∈E(Th )
κ
for all v ∈ Vh⊥ . The constant CP is independent of γ, h, and k, but depends on
the shape-regularity of the mesh and the constants ρ1 and ρ2 in (2.1) and (2.2),
respectively.
The proof of Proposition 4.1 will be given in Section 5.
4.3. hp-Interpolation of Scott-Zhang type
Next, we recall the (conforming) hp-Scott-Zhang interpolation result obtained in 30,
Theorem 2.4. To this end, we introduce the space
HB1 (Ω) = { u ∈ H 1 (Ω) : u|κ ∈ PkK (κ), κ ∈ EB (Th ), κ ∈ ∂K ∩ Γ, K ∈ Th }.
With this notation, the following result holds.
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
13
Lemma 4.4. There exists a linear operator Ih : HB1 (Ω) → Vh ∩ HB1 (Ω) satisfying
Ih v|κ = v|κ , for all κ ∈ EB (Th ), and
X
2 −2
kK
hK kv−Ih vk20,K +k∇(v−Ih v)k20,K +kk1/2 h−1/2 (v−Ih v)k20,∂K ≤ CI2 k∇vk20,Ω ,
K∈Th
with an interpolation constant CI , which is independent of h and k, and depends
on the shape-regularity of the mesh and the constants ρ1 , ρ2 , and ρ3 in (2.1), (2.2),
and (2.3), respectively.
Moreover, for the a posteriori error analysis in Section 4.4, we will need the
following auxiliary result.
Proposition 4.2. Let v ∈ H01 (Ω) and vh = Ih v ∈ Vhc its Scott-Zhang interpolant
from Lemma 4.4. Moreover, let uh be the DG approximation defined by (2.5). Then,
1/2
X
e
2
eh (uh , v − vh ) ≤ CA
ηK
+ A(f − Πh f, g − gh )2
k∇vk0,Ω .
Fh (v − vh ) − A
K∈Th
√
−1 1/2
Here, CA = 2CI max(1, CL γ ) , with CI and CL denoting the constants from
Lemma 4.4 and Lemma 4.1, respectively.
Again, we remark that, for γ ≥ 1, the constant CA in Proposition 4.2 can be
bounded independently of γ.
Proof. Let zgh ∈ HB1 (Ω) such that zgh = gh on Γ. It can then be readily seen
that L(zgh ) = Ugh in Σh . Furthermore, we set ξ = v − vh ∈ H01 (Ω) and T =
Feh (ξ) − Aeh (uh , ξ). Using the conformity of ξ, integration by parts and the definition
of the lifting operator L, we obtain
Z
X Z
T =
(f + ∆uh )ξdx −
∇h uh · (ξnK )ds
K
K∈Th
+
X Z
K∈Th
=
X Z
K∈Th
+
+
K
X Z
K
L(uh ) · ∇ξ dx −
X Z
K∈Th
(Πh f + ∆uh )ξ dx −
K∈Th
K
K∈Th
K
X Z
∂K
K
X
Ug · ∇ξ dx
κ∈EI (Th )
L(uh − zgh ) · ∇ξ dx −
Z
[[∇h uh ]]ξ ds
κ
X Z
K∈Th
K
(Ug − Ugh ) · ∇ξ dx
(f − Πh f )ξ dx.
Here, nK denotes the unit outward normal vector on the boundary ∂K of an element
K ∈ Th . Employing the first bound from Lemma 4.1, combined with the fact that
[[zgh ]] = 0 on interior edges and [[zgh ]] = gh n on boundary edges, we deduce that
X
ηJ2K .
kL(uh − zgh )k20,Ω ≤ CL γ −1
K∈Th
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
14
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
In addition, using the second estimate from Lemma 4.1 with g1 = g and g2 = gh ,
results in
kUg − Ugh )k20,Ω ≤ CL γ −1 A(0, g − gh )2 .
(4.5)
Thus, the Cauchy-Schwarz inequality yields
|T | ≤
√
2
X
2
ηR
+
K
2
ηE
+
K
CL γ −1 ηJ2K +
CL γ
K∈Th
×
X
K∈Th
2 −2
kK
hK kξk20,K
+
k∇ξk20,K
Noting that
X
κ∈EI (Th )
kk1/2 h−1/2 ξk20,κ ≤
+
−1
2
A(0, g − gh ) + A(f − Πh f, 0)
X
κ∈EI (Th )
kk
1/2 −1/2
h
ξk20,κ
!1/2
2
!1/2
.
1 X
kk1/2 h−1/2 ξk20,∂K ,
2
K∈Th
and exploiting the approximation properties in Lemma 4.4 leads to
!1/2
X
√
2
2
−1 1/2
|T | ≤ 2CI max(1, CL γ )
k∇vk0,Ω .
ηK + A(f − Πh f, g − gh )
K∈Th
This completes the proof.
4.4. The hp-a posteriori bound in Theorem 3.1
In this section we complete the proof of Theorem 3.1.
To this end, let gh be the approximation of the boundary datum g. We denote
by ugh the solution of the following problem
−∆ugh = f
ug h = g h
in Ω,
(4.6)
on Γ.
(4.7)
Since solutions of the Laplace equation depend continuously on their data, we readily obtain that
k∇(u − ugh )k0,Ω ≤ CS kg − gh k1/2,Γ ,
(4.8)
for a stability constant CS > 0.
Next, using the decomposition (4.4) of the space Vh into Vh = Vhc ⊕ Vh⊥ , we
write
uh − Ih ugh = uch + u⊥
h,
with Ih denoting the Scott-Zhang interpolation operator from Lemma 4.4. By the
triangle inequality, the error e = u − uh of the hp-DG approximation can then be
estimated as follows:
ku − uh k1,h ≤ ku − ugh k1,h + kugh − Ih ugh − (uh − Ih ugh )k1,h
≤ ku − ugh k1,h + kugh − Ih ugh − uch k1,h + ku⊥
h k1,h .
(4.9)
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
15
Employing (4.8), the first term on the right-hand side of (4.9) may be bounded by
the error in the approximation of g; thereby,
X Z
2
2
ku − ugh k1,h = k∇(u − ugh )k0,Ω +
γk2 h−1 |g − gh |2 ds
κ∈EB (Th )
≤ CS2 kg − gh k21/2,Γ +
≤
(CS2
X
κ∈EB (Th )
κ
Z
κ
γk2 h−1 |g − gh |2 ds
+ 1) A(0, g − gh )2 .
(4.10)
Using the equivalence result in Proposition 4.1 and noting that, in view of the
⊥
conformity properties of Ih , we have that [[u⊥
h ]] = [[uh ]] on interior edges and [[uh ]] =
(uh − gh )n on boundary edges, the third term in (4.9) can be bounded as follows
1/2
!1/2
X
X Z
2
2
−1
⊥
2
⊥
η JK
. (4.11)
γk h |[[uh ]]| ds
≤ CP
kuh k1,h ≤ CP
κ∈E(Th )
κ
K∈Th
Hence, we obtain
ku − uh k1,h ≤
kugh − Ih ugh − uch k1,h + (CS2
+ 1)
1/2
A(0, g − gh ) + CP
X
2
ηK
K∈Th
!1/2
.
To bound the term kugh −Ih ugh −uch k1,h , we first note that ugh −Ih ugh −uch ∈ H01 (Ω).
We then set
v=
ugh − Ih ugh − uch
∈ H01 (Ω).
kugh − Ih ugh − uch k1,h
With this definition, employing the coercivity result from Lemma 4.3, results in
eh (ug −Ih ug −uc , v),
kugh −Ih ugh −uch k1,h = A
h
h
h
kvk1,h = k∇vk0,Ω = 1. (4.12)
We note that
eh (u⊥ , v)
eh (ug − uh , v) + A
eh (ug − Ih ug − uc , v) = A
A
h
h
h
h
h
eh (u⊥ , v)
eh (u − uh , v) + A
eh (ug − u, v) + A
=A
h
h
eh (u⊥
eh (uh , v) + A
eh (ug − u, v) + A
= Feh (v) − A
h , v);
h
(4.13)
here, we have used the weak formulation in (4.3). Furthermore, from (4.2), we recall
that
eh (uh , vh ) − Feh (vh ) = 0
A
∀vh ∈ Vh .
Combining this with the estimates from (4.12) and (4.13), we deduce that
eh (u⊥ , v),
eh (uh , v − vh ) + A
eh (ug − u, v) + A
kugh − Ih ugh − uch k1,h = Feh (v − vh ) − A
h
h
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
16
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
for any vh ∈ Vh . Choosing vh = Ih v ∈ Vhc to be the Scott-Zhang interpolant from
Lemma 4.4 yields
kugh − Ih ugh − uch k1,h
eh (uh , v − vh )| + |A
eh (ug − u, v)| + |A
eh (u⊥
≤ |Feh (v − vh ) − A
h , v)|
h
!1/2
X
2
ηK
+ A(f − Πh f, g − gh )2
kvk1,h
≤ CA
K∈Th
+ CC ku − ugh k1,h kvk1,h + CC ku⊥
h k1,h kvk1,h
!1/2
X
2
≤ CA
ηK
kvk1,h + CA A(f − Πh f, g − gh )kvk1,h
K∈Th
+
CC (CS2
+ 1)
1/2
A(0, g − gh )kvk1,h+ CC CP
X
K∈Th
ηJ2K
!1/2
kvk1,h .
Here, we have applied the auxiliary result from Proposition 4.2, the continuity of
eh from Lemma 4.2, and the bounds in (4.10) and (4.11).
A
Using the fact that kvk1,h = 1, we conclude that
kugh − Ih ugh −
uch k1,h
≤ (CA + CC CP )
X
2
ηK
K∈Th
!1/2
+ (CA + CC (CS2 + 1)1/2 )A(f − Πh f, g − gh ).
Combining the above estimates gives
ku − uh k1,h ≤ (CA + (CC + 1)CP )
+ (CA + (CC +
1)(CS2
X
K∈Th
2
ηK
!1/2
+ 1)1/2 )A(f − Πh f, g − gh ),
which completes the proof of Theorem 3.1.
Note that, for γ ≥ max(1, γmin ), all the constants can be bounded independently
of γ.
4.5. Proof of Theorem 3.2
We present the proofs of the three assertions in Theorem 3.2 separately. The proofs
of (i) and (ii) are analogous to the corresponding bounds derived in 31, Lemma 3.4
and Lemma 3.5; for sake of completeness, we present the main steps.
Assertion (i): We first consider the case α > 1/2. To this end, we set vK =
2
(Πh f + ∆uh )Φα
K . Then, using that −∆u = f in L (K), we obtain by elementary
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
manipulations
−α/2 2
k0,K
kvK ΦK
=
=
=
Z
17
(Πh f + ∆uh )vK dx
ZK
ZK
K
(−∆u + ∆uh )vK dx +
∇(u − uh ) · ∇vK dx +
Z
ZK
K
(Πh f − f )vK dx
(Πh f − f )vK dx
α/2
−α/2
≤ k∇(u − uh )k0,K k∇vK k0,K + k(f − Πh f )ΦK k0,K kvK ΦK
k0,K .
From the proof of 31, Lemma 3.4, we have
2(1−α) 2 −2
−α/2
kK hK kvK ΦK k20,K .
k∇vK k20,K ≤ CkK
−α/2
k0,K = kK h−1
K ηα;RK , we readily obtain that
i
h
1−α
−1
ηα;RK ≤ C kK
k∇(u − uh )k0,K + kK
hK kf − Πh f k0,K .
Since kvK ΦK
(4.14)
This shows the assertion for α > 12 . For α ∈ [0, 1/2], we first use that ηα;RK ≤
β−α
Cε k K
ηβ;RK , for β = 1/2 + ε with ε > 0, and apply the bound in (4.14) to ηβ;RK .
Assertion (ii): We again first consider the case α > 1/2 and let κ be an edge
shared by two elements K1 and K2 . Set δκ := (K 1 ∪ K 2 )◦ ; Lemma 2.6 of 31 ensures
the existence of a function wκ ∈ H01 (δκ ) with wκ |κ = [[∇uh ]]Φα
κ , wκ |∂δκ = 0 and
2(2−α)
2
+ σ −1 k[[∇uh ]]Φα/2
k∇wκ k20,δκ ≤ Ch−1
κ k0,κ ,
K σkK
(4.15)
2
kwκ k20,δκ ≤ ChK σk[[∇uh ]]Φα/2
κ k0,κ ,
for any σ ∈ (0, 1]. Using that [[∇u]] = 0 on interior edges and that −∆u = f on
each element K, it can be readily seen that
Z
Z
2
k[[∇uh ]]Φα/2
k
=
[[∇u
]]w
ds
=
[[∇(uh − u)]]wκ ds
h
κ
κ
0,κ
κ
Z
Zκ
∇(uh − u) · nK2 wκ ds
∇(uh − u) · nK1 wκ ds +
=
Z ∂K2
Z∂K1
(f + ∆uh )wκ dx
∇h (uh − u) · ∇wκ dx +
=
δκ
δκ
≤ k∇h (u − uh )k0,δκ k∇wκ k0,δκ
+ kΠh f + ∆uh k0,δκ + kf − Πh f k0,δκ kwκ k0,δκ .
Here, nK1 and nK2 denote the unit outward normal vectors on the boundaries
∂K1 and ∂K2 , respectively. By summing up this estimate over all edges of a given
element K, invoking the bounds for k∇wκ k0,δκ and kwκ k0,δκ from (4.15), and using
assertion (i), we obtain
2(2−α)
−1
2
−1
3
ηα;E
≤
C
k
(σk
+
σ
)
+
k
σ
k∇h (u − uh )k20,δK
K
K
K
K
2(1+ε) −2 2
kK hK kf
+ CσkK
− Πh f k20,δK .
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
18
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
−2
Setting σ = kK
proves the assertion for α > 1/2. For α ∈ [0, 1/2], we have that
β−α
ηα;EK ≤ CkK ηβ;EK and use the above argument for ηβ;EK with β = 1/2 + ε to
obtain the assertion.
Assertion (iii): This is a simple consequence of the fact that the jump of u
vanishes over interior edges and the triangle inequality which gives, for any boundary
edge κ ∈ ∂K ∩ Γ,
kkh−1/2 (uh − gh )k20,κ ≤ 2kkh−1/2(uh − u)k20,κ + 2kkh−1/2 (g − gh )k20,κ .
This completes the proof of Theorem 3.2.
5. Norm equivalence
In this section, we prove the norm equivalence property stated in Proposition 4.1.
This result is an hp-extension of the approximation result in 29, Section 2.1; see
also 19, Theorem 5.3, and 22, Proposition 4.1.
5.1. Preliminaries
First, we introduce some additional notation and definitions.
Polynomial spaces: For an interval I = (a, b), we write Pk (I) to denote the
space of all polynomials of degree less than or equal to k. Furthermore, we set
k
I00
(I) = { q ∈ Pk (I) : q(a) = q(b) = 0 }.
Meshes: A node P of a finite element mesh Th is the vertex of an element K ∈ Th .
P is called an interior node if P 6∈ Γ; similarly, it is a boundary node if P ∈ Γ. We
denote by NI (Th ), NB (Th ) the sets of interior and boundary nodes, respectively,
and set N (Th ) = NI (Th ) ∪ NB (Th ). For an element K ∈ Th , we write E(K) and
N (K) to denote the sets of its edges and nodes, respectively. Moreover, for an edge
κ ∈ E(Th ), let N (κ) be the set of the nodes that belong to κ, and Th (κ) the set
of elements in Th that share the edge κ. Finally, for a node P ∈ N (Th ), we define
E(P ) and Th (P ) as the sets of edges and elements that share P , respectively.
5.2. Piecewise linear approximation
We begin by considering the conforming approximation of piecewise linear DG
functions. To this end, we define the linear discontinuous Galerkin finite element
space Veh by
Veh = { v ∈ L2 (Ω) : v|K ∈ S1 (K), K ∈ Th },
as well as the conforming subspace Vehc ⊂ Veh by Vehc = Veh ∩ H01 (Ω). Furthermore,
e ∈ Ve c is given by
we introduce an operator Ae : Veh → Vehc , where, for v ∈ Veh , Av
h
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
prescribing its nodal values as
X
−1
v|K (P )
|Th (P )|
e
Av(P
)=
K∈Th (P )
0
19
if P ∈ NI (Th ),
if P ∈ NB (Th ).
Here, |Th (P )| denotes the number of elements in the set Th (P ).
From 29, Theorem 2.2, the following approximation property holds.
Lemma 5.1. The approximant Ae : Veh → Vehc satisfies
X
e 20,Ω ≤ C
kh−1/2 [[v]]k20,κ
k∇h (v − Av)k
κ∈E(Th )
with a constant C > 0 that is independent of the mesh size.
∀v ∈ Veh ,
5.3. Approximation over edges
Next, we consider the conforming approximation of higher-order DG functions over
edges. To this end, we make use of the following extension result:
b be the reference triangle or the reference square, and
Proposition 5.1. Let K
b Then, there is a linear extension
k ∈ N. Furthermore, consider an edge κ
b ∈ E(K).
κ
b
k
k
b
b
b κb (b
operator Ek : I00 (b
κ) → Sk (K) such that for any qb ∈ I00
(b
κ), there holds E
b
k q) = q
κ
b
κ
b
b
b
b
on κ
b, Ek (b
q ) = 0 on ∂ K \ κ
b, and kEk (b
q )k1,Kb ≤ Ckb
q k1/2,00,bκ . Here, C > 0 is a
constant independent of the polynomial degree k.
Proof. See 3, Theorem 7.4 and Theorem 7.5, 2, Theorem 7.4 and Theorem 7.5,
or 30, Theorem B.4.
For an arbitrary element K ∈ Th and an edge κ ∈ E(K), let FK be the elemental
b onto K, and κ
b such that FK (b
mapping that maps K
b the edge of K
κ) = κ. The
κ
k
extension operator Ek,K : I00 (κ) → Sk (K) is then defined by
κb
κ
k
bk (q ◦ FK )] ◦ F −1 ,
Ek,K
(q) = E
q ∈ I00
(κ).
(5.1)
K
We are now ready to prove the following technical result.
Lemma 5.2. Let the two elements K1 , K2 ∈ Th share the interior edge κ ∈ EI (Th ).
Set δκ := (K 1 ∪ K 2 )◦ and let v1 ∈ Pk1 (κ) and v2 ∈ Pk2 (κ) with k1 , k2 ≥ 1.
By v1n ∈ P1 (κ) and v2n ∈ P1 (κ) we denote the nodal interpolants of v1 and v2 ,
respectively. Then there is a conforming approximation W c ∈ H01 (δκ ) such that
W1c := W c |K1 ∈ Sk1 (K1 ), W2c := W c |K2 ∈ Sk2 (K2 ), and
X Ekκ ,K (vi − vin ) − Wic 2
≤ C max(k1 , k2 )2 kh−1/2 (v1 − v2 )k20,κ
i
i
1,K
i
i=1,2
+ Ckh−1/2 (v1n − v2n )k20,κ ,
with a constant C > 0 independent of the polynomial degrees and the element sizes.
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
20
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
Similarly, let K be the element that contains the boundary edge κ ∈ E B (Th ).
Then, for v ∈ Pk (κ) with k ≥ 1 and its nodal interpolant v n ∈ P1 (κ), there is an
approximation W c ∈ Sk (K) such that W c = 0 on ∂K \ κ and
κ
E (v − v n ) − W c 2 ≤ Ck 2 kh−1/2 vk2 + Ckh−1/2 v n k2 .
0,κ
0,κ
k,K
1,K
Again, the constant C > 0 is independent of the polynomial degree and the element
size.
Proof. Let κ be an interior edge shared by K1 and K2 . It is sufficient to consider
the case where K1 and K2 are of reference size; the general case follows by a simple
scaling argument. Without loss of generality, we may further assume that k1 ≥ k2 .
k1
In order to construct W c in this case, we first note that v1 − v1n ∈ I00
(κ) and
k2
n
v2 − v2 ∈ I00 (κ). Furthermore, on κ, we introduce
k2
n
n
ϕ = 1/2 Π00
κ,k2 (v1 − v1 ) + (v2 − v2 ) ∈ I00 (κ),
1/2
k2
c
with Π00
κ,k2 denoting the H00 (κ)-projection onto I00 (κ). We then define W by
(
on K1 ,
W1c := Ekκ1 ,K1 (ϕ)
c
W =
W2c := Ekκ2 ,K2 (ϕ)
on K2 .
By construction and Proposition 5.1, the function W c vanishes on ∂δκ . Moreover,
W1c ∈ Sk1 (K1 ), W2c ∈ Sk2 (K2 ) and W1c |κ = ϕ = W2c |κ on κ. Therefore, W c ∈
H01 (δκ ). From the linearity of Ekκ1 ,K1 and the stability in Proposition 5.1, we obtain
κ
Ek ,K (v1 − v1n ) − W1c 1
1
1,K
1
n
n
≤ Ck(v1 − v1n ) − 1/2 Π00
κ,k2 (v1 − v1 ) − 1/2 (v2 − v2 )k1/2,00,κ
n
n
n
≤ Ck1/2(I − Π00
κ,k2 )(v1 − v1 ) + 1/2 ((v1 − v1 ) − (v2 − v2 ))k1/2,00,κ
n
n
n
≤ Ck(I − Π00
κ,k2 )(v1 − v1 )k1/2,00,κ + Ck(v1 − v2 ) − (v1 − v2 )k1/2,00,κ .
1/2
n
n
00
Since Π00
κ,k2 (v2 − v2 ) = v2 − v2 and I − Πκ,k2 is stable in H00 (κ), we can bound the
second term in the above inequality as follows:
n
00
n
n
k(I − Π00
κ,k2 )(v1 − v1 )k1/2,00,κ = k(I − Πκ,k2 )((v1 − v1 ) − (v2 − v2 ))k1/2,00,κ
≤ k(v1 − v2 ) − (v1n − v2n )k1/2,00,κ .
We conclude that
κ
Ek ,K (v1 − v1n ) − W1c ≤ C(kv1 − v2 k1/2,00,κ + kv1n − v2n k1/2,00,κ ).
1
1
1,K
1
A similar argument shows that
κ
n
n
n
c
E
k2 ,K2 (v2 − v2 ) − W2 1,K ≤ C(kv1 − v2 k1/2,00,κ + kv1 − v2 k1/2,00,κ ).
2
(5.2)
(5.3)
From the inverse inequalities in 38, Corollary 3.94, and interpolation, we readily
obtain that
kv1 − v2 k1/2,00,κ ≤ Ck1 kv1 − v2 k0,κ .
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
21
Furthermore, a simple h-version norm equivalence property on P1 (κ) shows that
kv1n − v2n k1/2,00,κ ≤ Ckv1n − v2n k0,κ .
This completes the proof for an interior edge; for a boundary edge, the result is
obtained analogously.
5.4. Approximation of DG functions
We consider the DG space defined in (2.4) and introduce the conforming subspace
Vhc given by
Vhc = Vh ∩ H01 (Ω).
The following approximation result holds.
Proposition 5.2. There is an approximant A : Vh → Vhc that satisfies
X Z
k2 h−1 |[[v]]|2 ds,
v ∈ Vh ,
k∇h (v − Av)k20,Ω ≤ C
κ∈E(Th )
κ
with a constant C > 0 that is independent of h and k.
Proof. Let v ∈ Vh . For any K ∈ Th , set vK := v|K ∈ SkK (K). We now proceed in
the following steps.
Decomposition of v: We begin by decomposing v into a nodal part, an edge
n
part, and an interior part. To this end, let vK
∈ S1 (K) be the nodal interpolant
of vK , K ∈ Th . Furthermore, for K ∈ Th and an edge κ of E(K), we denote by
n
n
VKκ = EkκK ,K (vK − vK
) the lifting of vK − vK
that was constructed in (5.1). By
P
n
κ
construction, (vK − vK ) − κ∈E(K) VK vanishes on ∂K and hence, we can define
i
the interior part vK
of vK by
X
i
n
vK
= (vK − vK
VKκ ,
)−
K ∈ Th .
κ∈E(K)
Thus, we may decompose v into
v = vn + ve + vi.
n
for any K ∈ Th .
Here, v n is the piecewise linear function in Veh given by v n |K = vK
e
Moreover, v is the function given by
X
VKκ ,
v e |K =
K ∈ Th .
κ∈E(K)
i
i
i
vK
,
Finally, v is given by v |K =
K ∈ Th ; by construction, v i ∈ Vhc .
Construction of the approximant: Next, we define the approximant Av. To this
e n ∈ Ve c ⊂ V c be the conforming piecewise linear approximation
end, let wn = Av
h
h
n
of v constructed in Lemma 5.1. Thereby,
X
kh−1/2 [[v n ]]k20,κ .
(5.4)
k∇h (v n − wn )k20,Ω ≤ C
κ∈E(Th )
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
22
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
In addition, for each edge κ ∈ EI (Th ), shared by the two elements K1 and K2 , we
let W κ be the conforming approximation in H01 (δκ ) constructed in Lemma 5.2. This
satisfies the following properties: W κ |K1 ∈ SkK1 (K1 ), W κ |K2 ∈ SkK2 (K2 ), and
|VKκ1 − W κ |21,K1 + |VKκ2 − W κ |21,K2 ≤ Ckkh−1/2 [[v]]k20,κ + Ckh−1/2 [[v n ]]k20,κ .
(5.5)
Similarly, for a boundary edge κ ∈ EB (Th ), contained in the element K, we denote
by W κ ∈ Sk (K) the conforming approximation in Lemma 5.2; this satisfies W κ = 0
on ∂K \ κ and
|VKκ − W κ |21,K ≤ Ckkh−1/2 [[v]]k20,κ + Ckh−1/2 [[v n ]]k20,κ .
We now set
we =
X
(5.6)
W κ.
κ∈E(Th )
By construction, w
and (5.6) that
e
∈
Vhc
k∇h (v e − we )k20,Ω ≤ C
and we conclude from the above estimates in (5.5)
X
κ∈E(Th )
kkh−1/2 [[v]]k20,κ + C
X
κ∈E(Th )
kh−1/2 [[v n ]]k20,κ .
(5.7)
Finally, we set w i = v i ∈ Vhc and define
Av = wn + we + wi .
Then, v − Av = v n − wn + v e − we . The triangle inequality and the bounds in (5.4)
and (5.7) give
X
X
k∇h (v − Av)k20,Ω ≤ C
kkh−1/2 [[v]]k20,κ + C
kh−1/2 [[v n ]]k20,κ . (5.8)
κ∈E(Th )
κ∈E(Th )
Bound of the nodal jumps: The desired estimate follows now from (5.8), provided
that
kh−1/2 [[v n ]]k20,κ ≤ Ckkh−1/2 [[v]]k20,κ ,
for any edge κ ∈ E(Th ). To show this, we note that
X
kh−1/2 [[v n ]]k20,κ ≤ C
[[v n ]](P )2 ≤ C
P ∈N (κ)
n
X
(5.9)
[[v]](P )2 .
P ∈N (κ)
Here, we have used the nodal exactness of v , that is, v(P ) = v n (P ) for all P ∈ N (κ).
Hence, from the inverse estimate in 38, Theorem 3.92, we obtain
kh−1/2 [[v n ]]k20,κ ≤ Ck[[v]]k2L∞ (κ) ≤ Ckkh−1/2 [[v]]k20,κ .
This shows (5.9) and completes the proof.
5.5. Proof of Proposition 4.1
The norm equivalence result, Proposition 4.1, follows now directly from Proposition 5.2 and from the fact that Vh⊥ is orthogonal to Vhc with respect to the norm
k · k1,h .
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
23
6. Numerical Experiments
In this section we present a series of numerical examples to illustrate the practical performance of the proposed a posteriori error estimator derived in Theorem 3.1 within an automatic hp-adaptive refinement procedure which is based on
1-irregular quadrilateral elements. The hp-adaptive meshes are constructed by first
marking the elements for refinement/derefinement according to the size of the local error indicators ηK ; this is done by employing the fixed fraction strategy, with
refinement and derefinement fractions set to 25% and 10%, respectively. Once an
element K ∈ Th has been flagged for refinement or derefinement, a decision must
be made whether the local mesh size hK or the local degree kK of the approximating polynomial should be adjusted accordingly. The choice to perform either
h-refinement/derefinement or p-refinement/derefinement is based on estimating the
local smoothness of the (unknown) analytical solution. To this end, we employ the
hp-adaptive strategy developed in 26, where the local regularity of the analytical
solution is estimated from truncated local Legendre expansions of the computed
numerical solution; see, also, 24.
Here, the emphasis will be to demonstrate that the proposed a posteriori error
indicator converges to zero at the same asymptotic rate as the energy norm of
the actual error on a sequence of non-uniform hp-adaptively refined meshes. For
simplicity, as in 6, we set the constant CEST arising in Theorem 3.1 equal to one
and ensure that the corresponding effectivity indices are roughly constant on all
of the meshes employed; here, the effectivity index is defined as the ratio of the
a posteriori error bound and the energy norm of the actual error. In general, to
ensure the reliability of the error estimator, CEST must be determined numerically
for the underlying problem at hand, cf. 14, for example. In all of our experiments,
the data approximation terms in the a posteriori bound (3.7) from Theorem 3.1 will
be neglected.
6.1. Example 1
In this example, we let Ω be the unit square (0, 1)2 in R2 ; further, we set g ≡ 0 on
Γ and select f so that the analytical solution to (1.1)–(1.2) is given by
2
u(x, y) = x(1 − x)y(1 − y)(1 − 2y)e−σ(2x−1) ,
where σ is a positive constant, cf. 31. Throughout this section we set σ = 25; we
note that a value of σ = 2.5 was employed in 31.
In Figure 1(a) we present a comparison of the actual and estimated energy norm
of the error versus the third root of the number of degrees of freedom in the finite
element space Vh on a linear-log scale, for the sequence of meshes generated by
our hp-adaptive algorithm. Here, numerical experiments are presented for different
values of the parameter γ arising in the definition of the discontinuity stabilization
function c; cf. (2.6). We remark that the third root of the number of degrees of
freedom is chosen on the basis of the a priori error analysis carried out in 40; cf.,
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
24
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
0
8
10
7
−1
Effectivity Index
10
−2
10
−3
10
Error Bounds
−4
10
−5
10
−6
PSfrag replacements
paper
10
0
γ=10
γ=100
γ=1000
5
True Errors
PSfrag replacements
10
15
20
25
1
30
35
6
5
4
3
2
1
γ=10
γ=100
γ=1000
0
0
2
(Degrees of Freedom) 3
(a)
4
6
8
10
12
14
16
18
Mesh Number
(b)
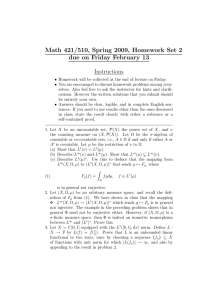
Fig. 1. Example 1. (a) Comparison of the actual and estimated energy norm of the error with
respect to the (third root of the) number of degrees of freedom; (b) Effectivity indices.
also, 37. For each value of γ, we observe that the error bound over-estimates the true
error by a (reasonably) consistent factor; indeed, from Figure 1(b), we see that the
computed effectivity indices oscillate around a value of approximately 6. Moreover,
we observe that both the actual error in the underlying computed solution and the
corresponding a posteriori error bound are relativity insensitive to changes in γ as
predicted in Theorem 3.1. Finally, from Figure 1(a) we observe that the convergence
lines using hp-refinement are (roughly) straight on a linear-log scale, which indicates
that exponential convergence is attained for this smooth problem.
In Figure 2 we show the mesh generated using the proposed hp-a posteriori
error indicator with γ = 10 after 9 and 16 hp-adaptive refinement steps. Here, we
observe that some h-refinement of the mesh has been performed in the vicinity of
the base of the exponential ‘hills’ situated in the left- and the right-hand sides of
the domain, where the gradient/curvature of the analytical solution is relativity
large. Once the h-mesh has adequately captured the structure of the solution, the
hp-adaptive algorithm increased the degree of the approximating polynomial within
the interior part of the domain containing these hills.
6.2. Example 2
In this section we let Ω be the L-shaped domain (−1, 1)2 \ [0, 1) × (−1, 0], and select
f = 0. Then, writing (r, ϕ) to denote the system of polar coordinates, we impose
an appropriate inhomogeneous boundary condition for u so that
u = r2/3 sin(2ϕ/3);
cf. 40. We note that u is analytic in Ω\ {0}, but ∇u is singular at the origin; indeed,
here u 6∈ H 2 (Ω). This example reflects the typical (singular) behavior that solutions
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
3
3
3
3
2
2
2
2
2 2 3
2222 3
2222
2222 3
2222
22 2 3
22
2222 3
2222
2222 3
2222
22 2 3
22
2222 3
2222
2222 3
2222
2222 3
2222
2 2 3
2 3 3
3
4
3
3
4
3
4
5
4
4
5
4
33 4 4
23
2233 3
2222
2222 3
2222
2 2 3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
4
4
4
4
4
3
3
3
3
3
3
3
4
4
3
3
3
3
3
2
2
3
3
3
3
3
3
3
4
3
3
3
3
3
3
3
4
4
3
3
3
3
3
2
2
3
3
3
3
3
3
3
4
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
4
4
4
4
4
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
2 2
2222
2222
2222
2222
2
2 2
22
2222
2222
2222
2222
2
2 2
22
2222
2222
2222
2222
2222
2222
2 2
3 2
3
4
3
3
4
3
4
5
4
4
5
4
3
4 4 33
2
3
3
2
3 2222
2
222
3 2
2222
3 2 2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
3
3
3
3
2
2
2
2
25
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
(a)
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
22
22
3334 4
22
22
23
2 2
5 6
222
22
3333
3
2 22
3
33
34 4
2
222
2
22
2
333
3
33
3
44 5 6
22
22
33
33
2 2
2
2
2
2
3
3
3
333
3
3
222223333
44
3
3
2
2
2
2
3
3
3
3
3
3
2 2 222223333334 4 5 6
233
3
3
33
2 2 22
22
2
3
33
33
34 4
223
2
33
3
33
33
3
2 2 22
44 5 6
22
23
33
33
33
2
2
33
3
3
33
2 2 22
44
2
2
23
3
3
33
33
3
2
2
2
3
3
3
3
3
34 4 4 5
2 2 2222333333
33
6
2
2
2
3
3
3
3
3
3
2 2 22223333333
34 4 4 5
2
2
2
3
3
3
3
3
3
3
2 2 222233333334 4 4 5 6
2
2
2
3
3
3
3
3
3
3
2 2 222233333334 4 4 5
2
2
2
3
3
3
3
3
3
3
2 2 222233333334 4 5 6
33
3
3
33
2 2 22
22
22
23
3
33
33
34 4
2
2
33
3
33
33
3
2 2 22
44 5 6
22
23
33
33
33
33
33
2 2 22
22
22
23
33
33
33
33
34 4
2
2
2
3
3
3
3
3
3
3
44 5 6
22
22
33
33
33
2 2
2
2
2
2
3
3
3
3
3
22222333333
44
3
2222
2233
333
33
33
33
22
34 4 5 6
2 2
22
23
33
33
33
22
44
2
2
22
2
3
3
3
3
2222
2223
2333
3333
334 4
22
2 2
222
2333
34 4 5 5
2 22
22
222
2233
233
33
34 5
222
22
23
33
2 2
23 4 5 5 6 6
2 2 22
22
22345 6
2 2
23 4 5
2 22
22
7
22
223
234 5
22
2 2
22
2234 5 6
22
2
22
222
23343
22
23
2 2
5
6
22
34
22
2
7
22
223
2233
334 5
22
2 2
222
223
34 5 6
22
2
22
223
233
33
34 5
2 2 222
23
33
6
22
333
34 5
2 2 22
2
7
22
223
233
334 5
2 2 222
223
2333
2 2 22
455 6
2
22
333
2 2 223
45 6 7
34 5
2 2 22
2
8
23
34 5
2 2 223
34 5 6 7
2 2 22
2
23
223
334 5 5
2 2 222
6
7
7
22
333
34 5
2 2 22
2
22
223
233
3333
334 5 5
2 2 222
223
2
233
3
33
33
34 5 6 7
2 2 22
2
2
22
3
3
33
3
3
22
2233
3333
33334 4
2
222
2 2
22
233
33333
33
34 4 5 6
22
22
22
222
2333
333
334 4
222
2 2
222
2
233
2
333
3
34 4 5 6
2 22
22
22
23
33
7
6
6
6
6
6
6
6
6
5
5
7
6
6
6
6
6
6
6
6
6
5
6
6
6
6
6
6
6
6
6
5
6
6
6
7
6
6
6
7
6
6
6
6
7
6
6
6
6
6
6
6
6
5
5
6
6
6
6
7
8
8
8
8
7
7
33
22
2222 2
43
33
22
5 4
332
33
2222
22
4 43
22 2
33
3
33
3
332
3
22
22
22
22
43
33
33
33
22
5 4
3
3
3
3
3
322
2
22 2
4 4333333
22
22
22
3
3
3
3
3
3
2
2
2
22 2 2
43333332222
5 4
3
3
3
3
3
3
3
2
2
22 2 2
4 43333333222
3
3
3
3
3
3
3
2
2
22 2 2
43333333222
5 4
3
3
3
3
3
3
3
2
2
22 2 2
4 43333333222
3
3
3
3
3
3
3
2
2
22 2 2
5 4 4 43333333222
3
3
3
3
3
3
3
2
2
22 2 2
5 4 4 43333333222
3
3
3
3
3
3
3
2
2
22 2 2
5 4 4 43333333222
3
3
3
3
3
3
3
2
2
22 2 2
5 4 4 43333333222
3
3
3
3
3
3
3
2
2
22 2 2
43333333222
5 4
3
3
3
3
3
3
3
2
2
22 2 2
4 43333333222
3
3
3
3
3
3
3
2
2
22 2 2
43333333222
5 4
3
3
3
3
3
3
3
2
2
22 2 2
4 43333333222
3
3
3
3
3
3
3
2
2
22
43333332222
5 4
3
3
3
3
3
3
2
2
2
22 2
4 43333332222
33
33
33
3322
2222
222
43
3
33
5 4
33
33
3
32
22
22 2
4 43
3
3
3
32
2
2
22
3333
333
32
22
22
222
433
222
5 4
33
32
22
22
4 43
22 2
33
3
3
2
2
2
3332
3222
2222
222 2
433
6 5
22 2 2 2
5 5 4 32
22
43222 2
6 5
22
5 4 32
22 2
7
322
22
432
22 2
2
6 5
32
22
22
5 43
32
2
32
222
222
32
6 5 4
222
2
22 2
43
3
2
22
7
3322
2222
222
433
6 5
32
22
22 2
5 43
33
3
2
22
3332
3222
222 2 2
433
6 5
33
22
22 2 2
5 43
33
3
2
22
7
3332
3222
222 2 2
433
6 5
22
22 2 2
5 5 43
33
22
322 2 2
432
7 6 5
22 2 2
5 43
32
8
322 2 2
432
7 6 5
22 2 2
5 43
3332
222 2 2
5 432
22
7 7 6 5
332
2222 2 2
5 43
3333
333
3222
222 2 2
5 433
33
32
22
7 6 5
333
3332
22
22 2 2
5 43
33
333
3333
332
22
222
222
433
6 5 4
333
33
333
3322
22
222
222 2
4 43
33
333
3332
322
2222
4
4
2
33
33
22
22
6 5 4 4333222222 2
2
33322222 2
6
6
6
6
6
6
6
6
6
6
5
6
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
(b)
Fig. 2. Example 1. hp-mesh after: (a) 9 adaptive refinements, with 426 elements and 5392 degrees
of freedom; (b) 16 adaptive refinements, with 2088 elements and 34426 degrees of freedom.
of elliptic boundary value problems exhibit in the vicinity of reentrant corners in
the computational domain.
Figure 3(a) shows the history of the actual and estimated energy norm of
the error on each of the meshes generated by our hp-adaptive algorithm for
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
26
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
0
6
10
Effectivity Index
5
−1
10
Error Bounds
−2
10
−3
10
PSfrag replacements
−4
10
5
γ=10
γ=100
γ=1000
4
3
2
1
PSfrag replacements
True Errors
10
15
1
(Degrees of Freedom) 3
(a)
20
0
0
γ=10
γ=100
γ=1000
5
10
15
Mesh Number
(b)
Fig. 3. Example 2. (a) Comparison of the actual and estimated energy norm of the error with
respect to the (third root of the) number of degrees of freedom; (b) Effectivity indices.
γ = 10, 100, 1000. As in the previous example, we observe that, for each γ, the
a posteriori bound over-estimates the true error by a consistent factor; for γ = 10,
the effectivity index tends to a value of just under 3, while for γ = 100, 1000, this
quantity tends to a value just below 4, cf. Figure 3(b). Additionally, from Figure
3(a) we observe exponential convergence of the energy norm of the error using hprefinement; indeed, for each γ, on a linear-log scale, the convergence lines are on
average straight.
In Figure 4 we show the mesh generated using the local error indicators ηK after
13 hp-adaptive refinement steps with γ = 10. Here, we see that the h-mesh has been
largely refined in the vicinity of the re-entrant corner located at the origin; from
the zoom, we see that this refinement occurs in the diagonal direction x = y. In
the other diagonal direction, x = −y, p-refinement is employed as the solution is
deemed to be smooth here. Additionally, we see that the polynomial degrees have
been increased away from the origin, since the underlying analytical solution is
smooth in this region.
7. Concluding Remarks
In this paper, we have presented the first hp-version energy norm a posteriori error
analysis for discontinuous Galerkin discretizations of elliptic boundary-value problems. The analysis is based on employing a non-consistent reformulation of the DG
scheme, together with a new hp-version norm equivalence result for the underlying
discontinuous finite element space. Although our analysis is restricted to conforming meshes consisting of triangles and quadrilaterals, the numerical tests presented
in this article clearly demonstrate that, in practice, the proposed hp-a posteriori
estimator works equally well on 1-irregularly refined meshes with hanging nodes.
The derivation of a posteriori error bounds on such nonconforming meshes with no
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
5
6
6
5
6
6
27
5
5
6
6
5
6
6
5
6
6
5
5 5 5 4
5 66
73
5454
4
67
5
74
55 5
4
23
5
58
48
44
55
4455
4 5
5
6
5
6
6
8
8
3
2
6
5
6
8
8
3
2
8
3
8
4
2
3
2
3
2
2
4
2
2
3
5
4
2
8
2
4
2
2
3
3
Fig. 4. Example 2. hp-mesh after 13 adaptive refinements, with 138 elements and 5335 degrees of
freedom.
additional loss of powers of the approximation degree remains an open problem.
We emphasize that our analysis can be extended with only minor modifications to more general second-order diffusion-dominated problems. Similarly, the
proposed estimator can be readily generalized to problems with Neumann and/or
mixed boundary conditions. Furthermore, although here we have used the (symmetric) interior penalty approach to discretize the boundary-value problem (1.1)–(1.2),
our results remain valid for any other DG formulation whose underlying primal form
Ah is both coercive and continuous, such as, e.g., the local discontinuous Galerkin
method; for details, we refer the reader to 1. Finally, we mention that the extension
of our hp-version a posteriori error analysis to the Stokes equations of incompressible fluid flow can be found in the recent conference paper 21; for extensions to
second–order quasi-linear partial differential equations, we refer to 27.
Future work will be devoted to extending our approach to convection-diffusion
problems, where the convection dominates, as well as to problems in three space
dimensions.
Acknowledgment
The authors would like to thank Jens M. Melenk for valuable discussions regarding
hp-interpolation of non-smooth functions.
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
28
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
References
1. D.N. Arnold, F. Brezzi, B. Cockburn, and L.D. Marini. Unified analysis of discontinuous Galerkin methods for elliptic problems. SIAM J. Numer. Anal., 39:1749–1779,
2001.
2. I. Babuška, A. Craig, J. Mandel, and J. Pitkäranta. Efficient preconditioning for the p–
version finite element method in two dimensions. SIAM J. Numer. Anal., 28:624–661,
1991.
3. I. Babuška and M. Suri. The hp–version of the finite element method with quasiuniform meshes. RAIRO Anal. Numér., 21:199–238, 1987.
4. I. Babuška and M. Suri. The treatment of nonhomogeneous Dirichlet boundary conditions by the p–version of the finite element method. Numer. Math., 55:97–121, 1989.
5. I. Babuška and M. Suri. The p and h-p versions of the finite element method, basic
principles and properties. SIAM Review, 36:578–632, 1994.
6. R. Becker, P. Hansbo, and M.G. Larson. Energy norm a posteriori error estimation for
discontinuous Galerkin methods. Comput. Methods Appl. Mech. Engrg., 192:723–733,
2003.
7. R. Becker, P. Hansbo, and R. Stenberg. A finite element method for domain decomposition with non-matching grids. Modél. Math. Anal. Numér., 37:209–225, 2003.
8. R. Bustinza, G. Gatica, and B. Cockburn. An a posteriori error estimate for the local
discontinuous Galerkin method applied to linear and nonlinear diffusion problems. J.
Sci. Comput., 22(1):147–185, 2005.
9. C. Carstensen, S. Bartels, and S. Jansche. A posteriori error estimates for nonconforming finite element methods. Numer. Math., 92(2):233–256, 2002.
10. P. Castillo, B. Cockburn, D. Schötzau, and C. Schwab. Optimal a priori error estimates
for the hp-version of the local discontinuous Galerkin method for convection–diffusion
problems. Math. Comp., 71:455–478, 2002.
11. B. Cockburn. Discontinuous Galerkin methods for convection-dominated problems. In
T. Barth and H. Deconink, editors, High-Order Methods for Computational Physics,
volume 9, pages 69–224. Springer, 1999.
12. B. Cockburn, G.E. Karniadakis, and C.-W. Shu, editors. Discontinuous Galerkin
Methods. Theory, Computation and Applications, volume 11 of Lect. Notes Comput.
Sci. Engrg. Springer, 2000.
13. B. Cockburn and C.-W. Shu. Runge–Kutta discontinuous Galerkin methods for
convection–dominated problems. J. Sci. Comput., 16:173–261, 2001.
14. K. Eriksson, D. Estep, P. Hansbo, and C. Johnson. Introduction to adaptive methods for differential equations. In A. Iserles, editor, Acta Numerica, pages 105–158.
Cambridge University Press, 1995.
15. E.H. Georgoulis and E. Süli. Optimal error estimates for the hp–version interior
penalty discontinuous Galerkin finite element method. IMA J. Numer. Anal., 25:205–
220, 2005.
16. B. Guo and I. Babuška. The hp-version of the finite element method. Part I: The basic
approximation results. Comp. Mech., 1:21–41, 1986.
17. B. Guo and I. Babuška. The hp-version of the finite element method. Part II: General
results and applications. Comp. Mech., 1:203–220, 1986.
18. K. Harriman, P. Houston, B. Senior, and E. Süli. hp–Version discontinuous Galerkin
methods with interior penalty for partial differential equations with nonnegative characteristic form. In C.-W. Shu, T. Tang, and S.-Y. Cheng, editors, Recent Advances in
Scientific Computing and Partial Differential Equations. Contemporary Mathematics
Vol. 330, pages 89–119. AMS, 2003.
19. P. Houston, I. Perugia, and D. Schötzau. Mixed discontinuous Galerkin approximation
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
paper
hp-DG ENERGY NORM A POSTERIORI ERROR ESTIMATION
29
of the Maxwell operator. SIAM J. Numer. Anal., 42:434–459, 2004.
20. P. Houston, I. Perugia, and D. Schötzau. Energy norm a posteriori error estimation
for mixed discontinuous Galerkin approximations of the Maxwell operator. Comput.
Methods Appl. Mech. Engrg., 194(2-5):499–510, 2005.
21. P. Houston, D. Schötzau, and T. Wihler. hp-Adaptive discontinuous Galerkin finite
element methods for the Stokes problem. In P. Neittaanmäki, T. Rossi, S. Korotov,
E. Oñate, J. Périaux, and D. Knörzer, editors, Proceedings of the European Congress
on Computational Methods in Applied Sciences and Engineering, Volume II, 2004.
22. P. Houston, D. Schötzau, and T. Wihler. Energy norm a posteriori error estimation for
mixed discontinuous Galerkin approximations of the Stokes problem. J. Sci. Comput.,
22(1):357–380, 2005.
23. P. Houston, C. Schwab, and E. Süli. Discontinuous hp-finite element methods for
advection–diffusion–reaction problems. SIAM J. Numer. Anal., 39:2133–2163, 2002.
24. P. Houston, B. Senior, and E. Süli. Sobolev regularity estimation for hp–adaptive finite
element methods. In F. Brezzi, A. Buffa, S. Corsaro, and A. Murli, editors, Numerical
Mathematics and Advanced Applications ENUMATH 2001, pages 631–656. Springer,
2003.
25. P. Houston and E. Süli. Adaptive finite element approximation of hyperbolic problems.
In T. Barth and H. Deconinck, editors, Error Estimation and Adaptive Discretization
Methods in Computational Fluid Dynamics. Lect. Notes Comput. Sci. Engrg., volume 25, pages 269–344. Springer, 2002.
26. P. Houston and E. Süli. A note on the design of hp–adaptive finite element methods
for elliptic partial differential equations. Comput. Methods Appl. Mech. Engrg., 194(25):229–243, 2005.
27. P. Houston, E. Süli, and T. Wihler. hp-Adaptive discontinuous Galerkin FEM for
quasilinear elliptic PDEs. Technical report. In preparation.
28. G. Kanschat and R. Rannacher. Local error analysis of the interior penalty discontinuous Galerkin method for second order elliptic problems. J. Numer. Math., 10:249–274,
2002.
29. O.A. Karakashian and F. Pascal. A posteriori error estimation for a discontinuous
Galerkin approximation of second order elliptic problems. SIAM J. Numer. Anal.,
41:2374–2399, 2003.
30. J.M. Melenk. hp–Interpolation of non-smooth functions. SIAM J. Numer. Anal.,
43:127–155, 2005.
31. J.M. Melenk and B.I. Wohlmuth. On residual-based a posteriori error estimation in
hp-FEM. Adv. Comp. Math., 15:311–331, 2001.
32. J.T. Oden, I. Babuška, and C.E. Baumann. A discontinuous hp-finite element method
for diffusion problems. J. Comput. Phys., 146:491–519, 1998.
33. I. Perugia and D. Schötzau. An hp-analysis of the local discontinuous Galerkin method
for diffusion problems. J. Sci. Comput., 17:561–571, 2002.
34. B. Rivière and M.F. Wheeler. A posteriori error estimates for a discontinuous Galerkin
method applied to elliptic problems. Comput. Math. Appl., 46:141–163, 2003.
35. B. Rivière, M.F. Wheeler, and V. Girault. Improved energy estimates for interior
penalty, constrained and discontinuous Galerkin methods for elliptic problems, Part
I. Computational Geosciences, 3:337–360, 1999.
36. D. Schötzau, C. Schwab, and A. Toselli. Mixed hp-DGFEM for incompressible flows.
SIAM J. Numer. Anal., 40:2171–2194, 2003.
37. D. Schötzau and T. P. Wihler. Exponential convergence of mixed hp-DGFEM for
Stokes flow in polygons. Numer. Math., 96:339–361, 2003.
38. C. Schwab. p- and hp-FEM – Theory and Application to Solid and Fluid Mechanics.
March 25, 2007 14:13 WSPC/INSTRUCTION FILE
30
paper
P. HOUSTON, D. SCHÖTZAU, T.P. WIHLER
Oxford University Press, Oxford, 1998.
39. H. Triebel. Interpolation Theory, Function Spaces and Differential Operators. J. Barth
Publ., Leipzig, Germany, 2nd edition, 1995.
40. T.P. Wihler, P. Frauenfelder, and C. Schwab. Exponential convergence of the hpDGFEM for diffusion problems. Comput. Math. Appl., 46:183–205, 2003.